
Measurement of 3D Wrist Angles by Combining Textile Stretch Sensors and AI Algorithm




Abstract
1. Introduction
2. Materials and Methods
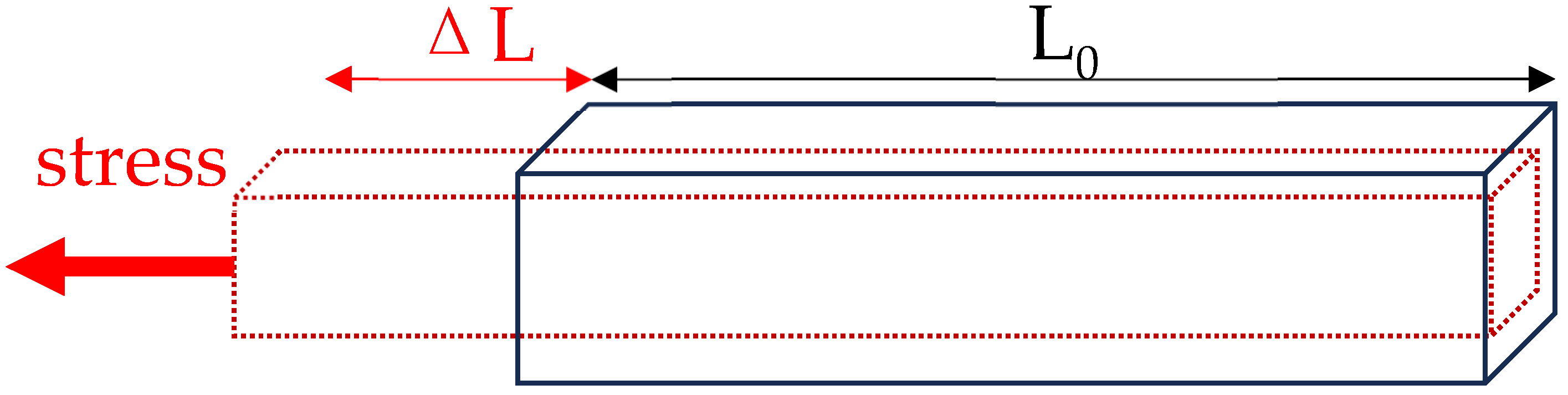
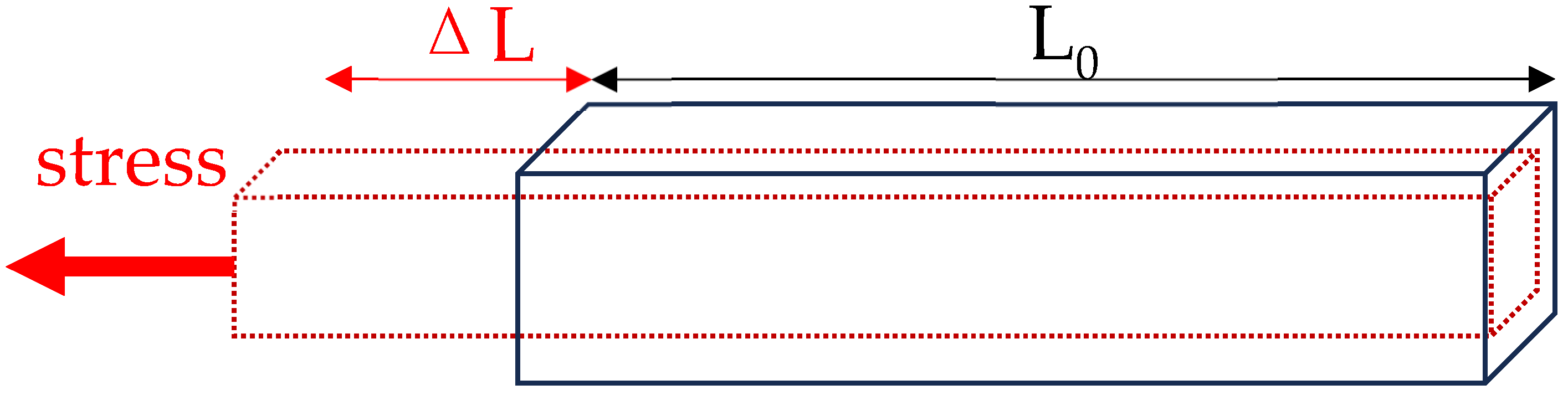
2.1. Principle of Stretch Sensors
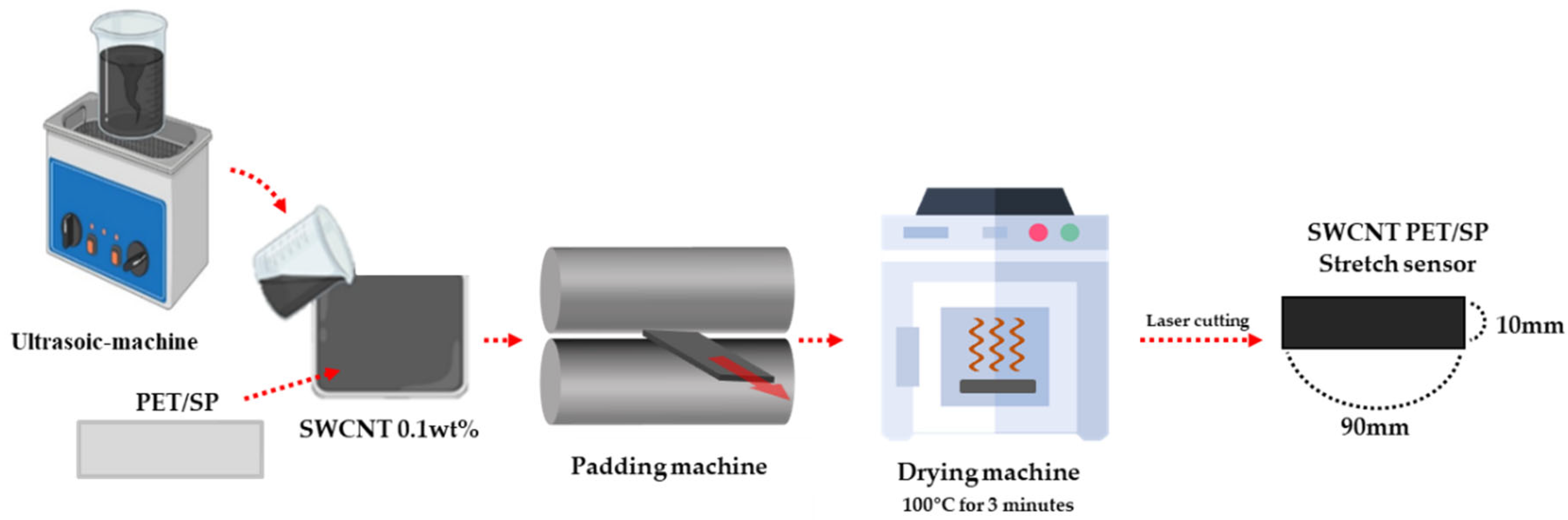
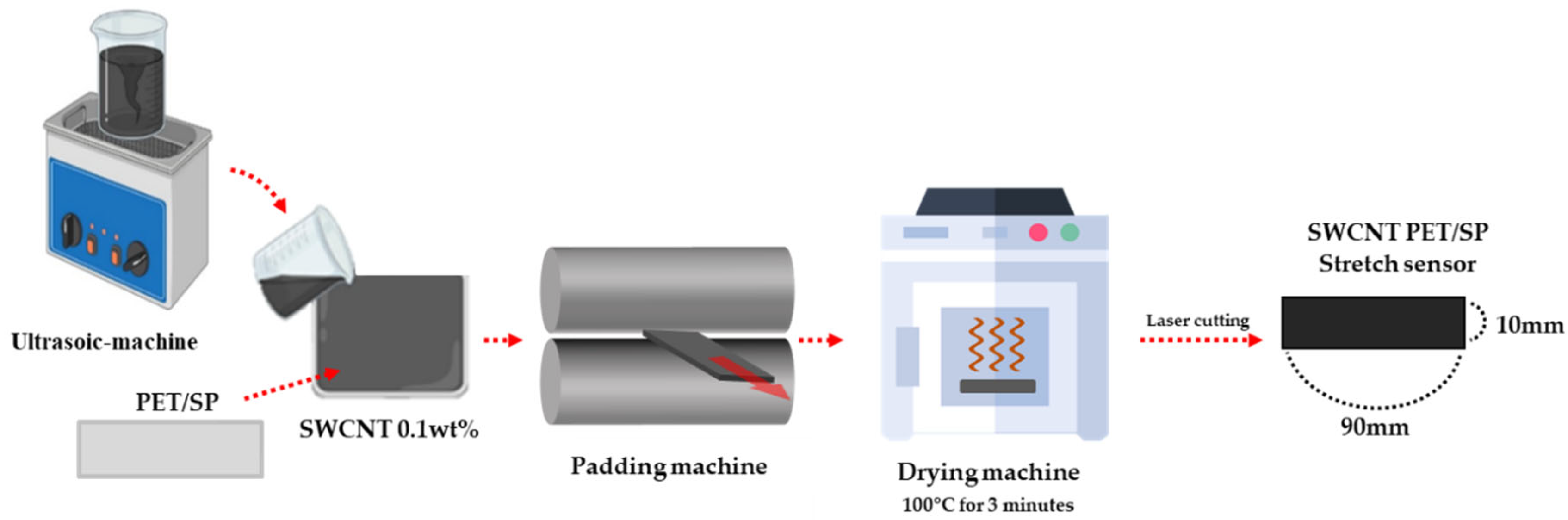
2.2. Textile Stretch Sensor Fabrication
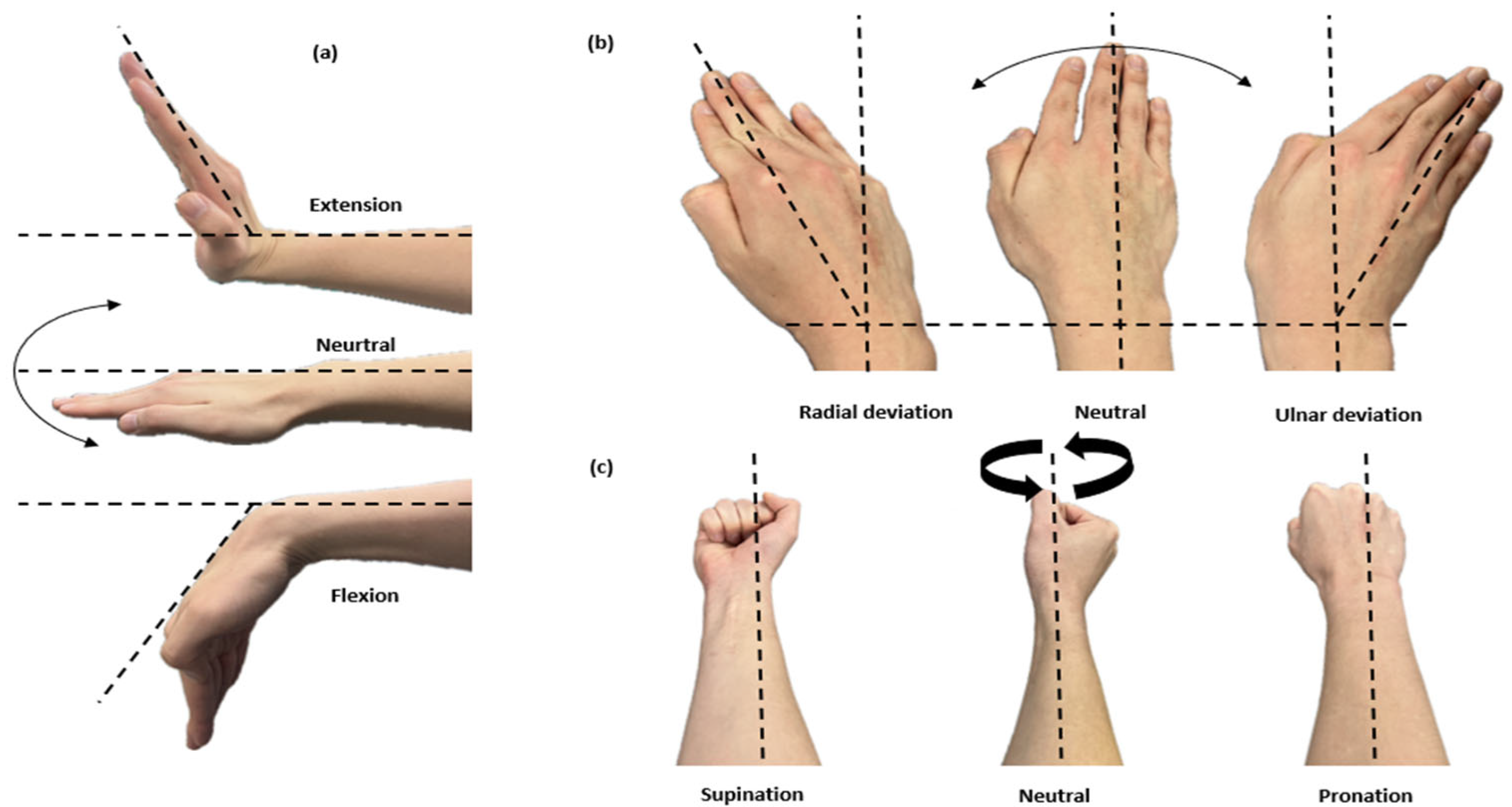
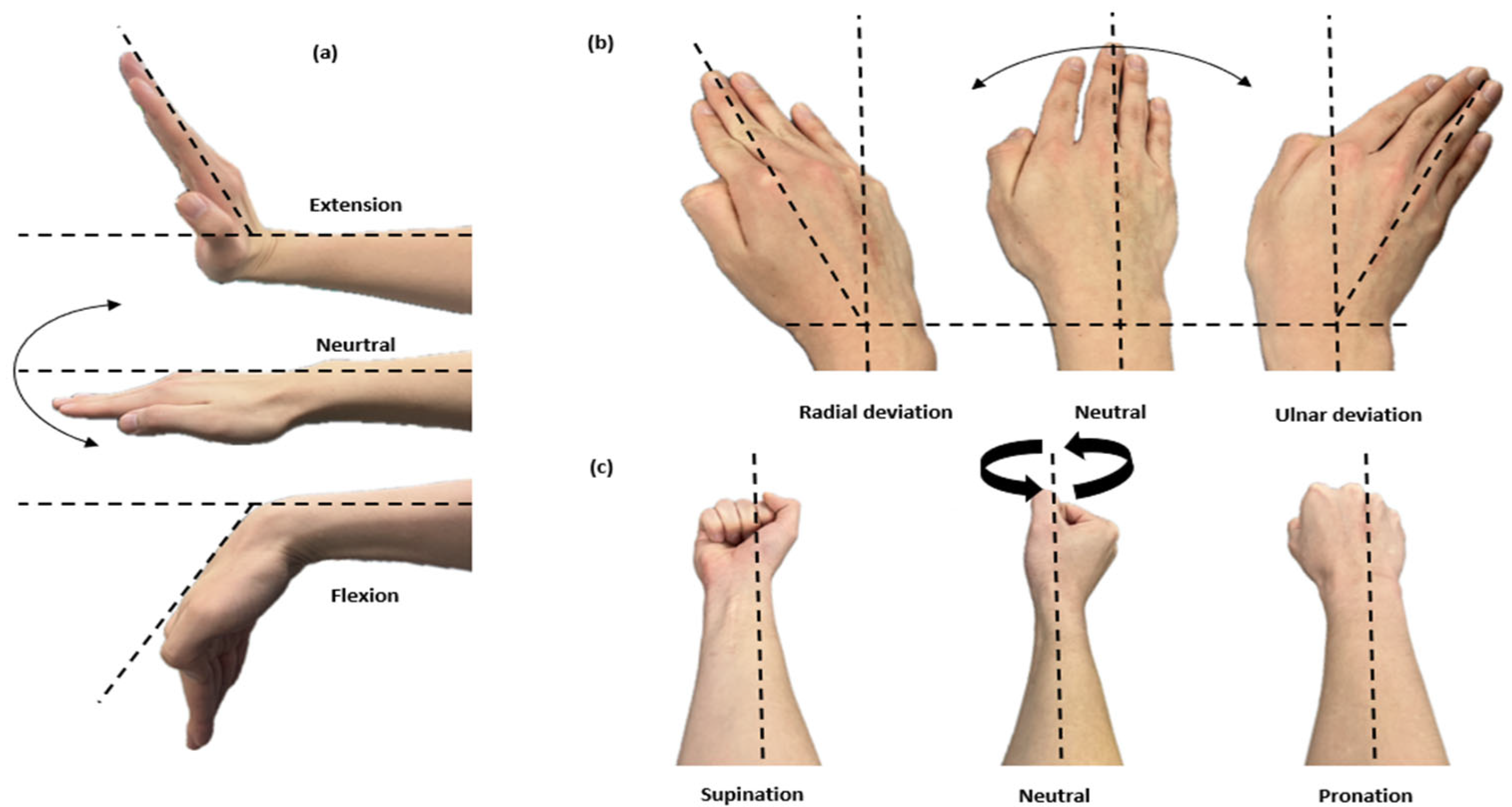
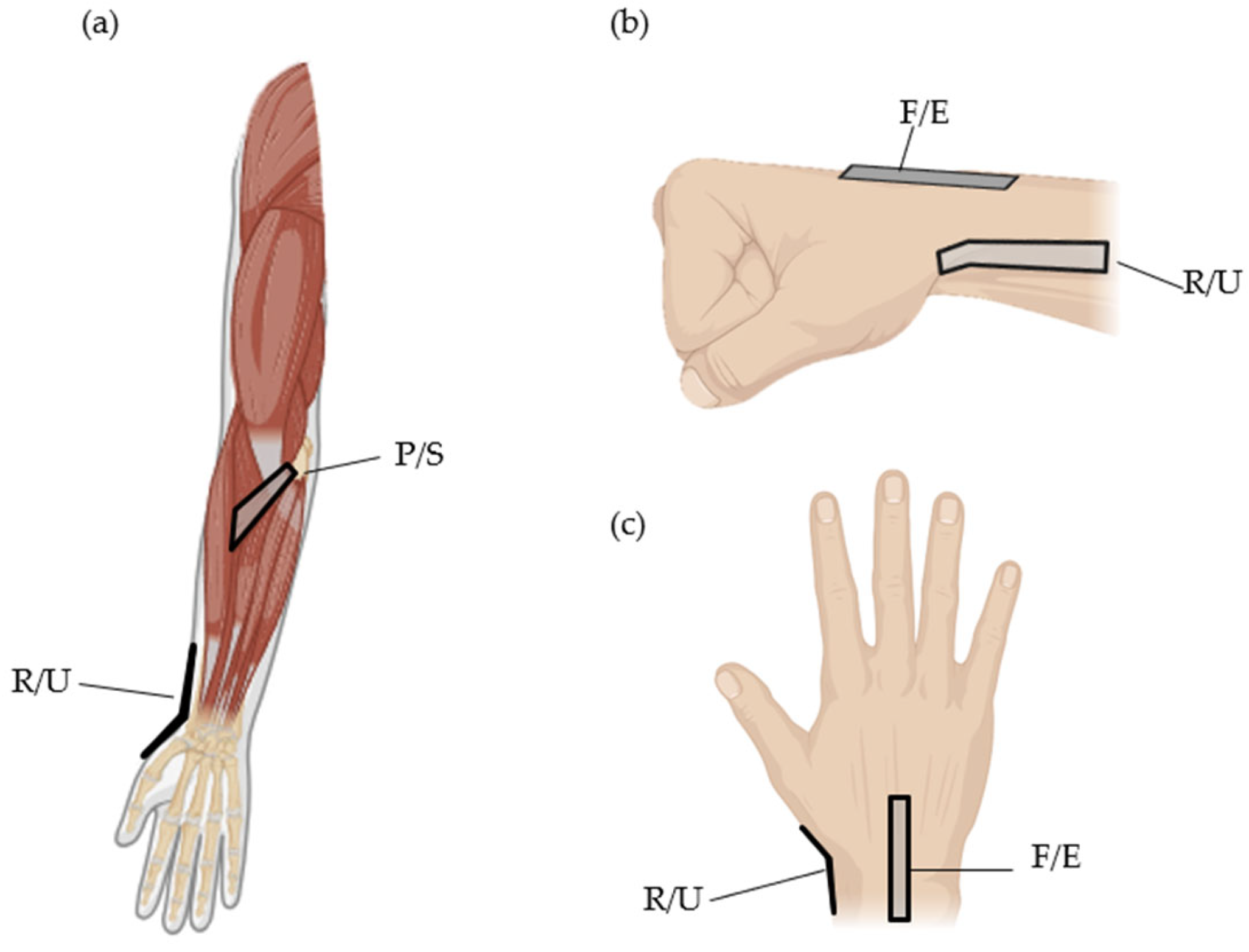
2.3. Segmentation of Wrist Joint Movement
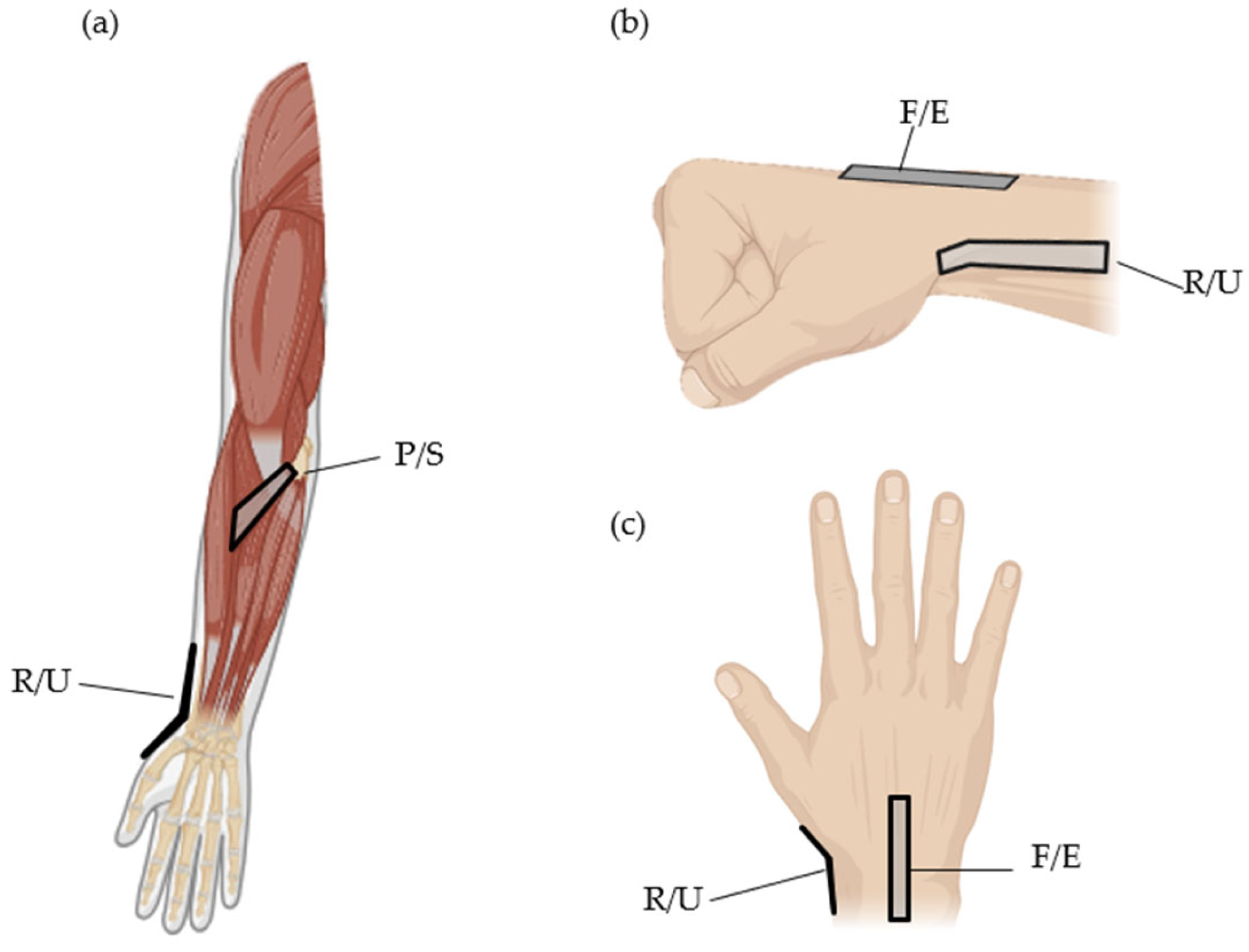
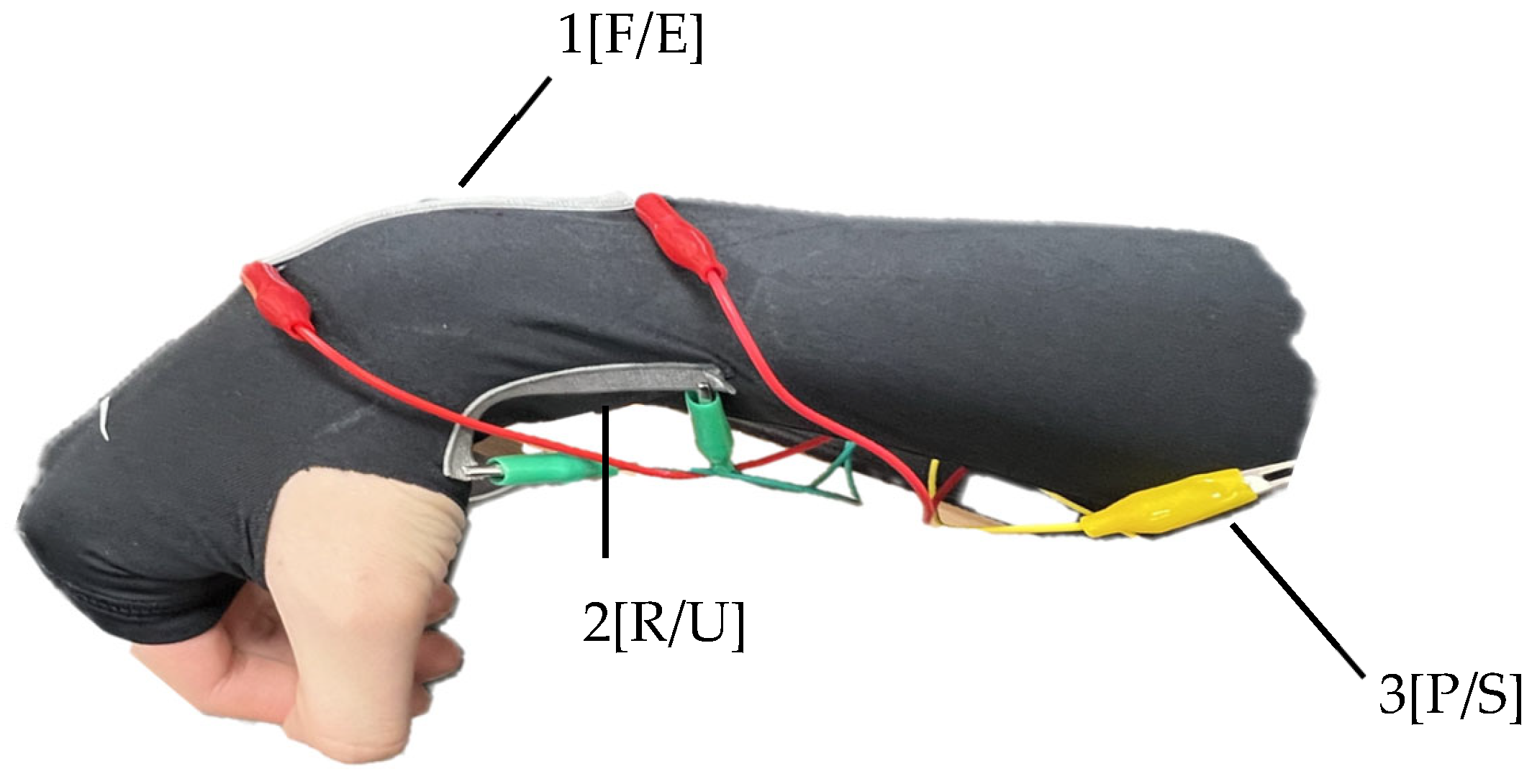
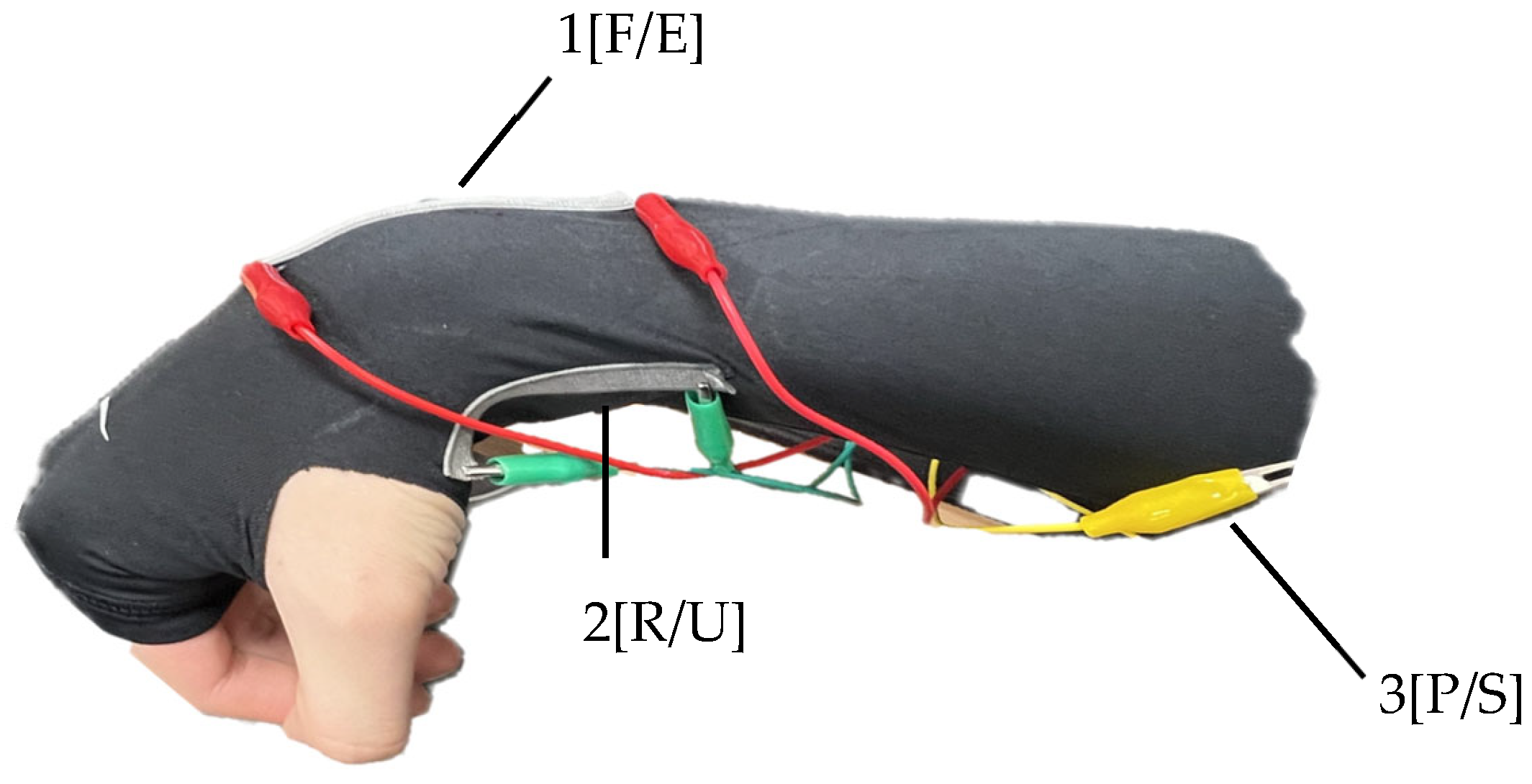
2.4. The Attachment Location of Stretch Sensors
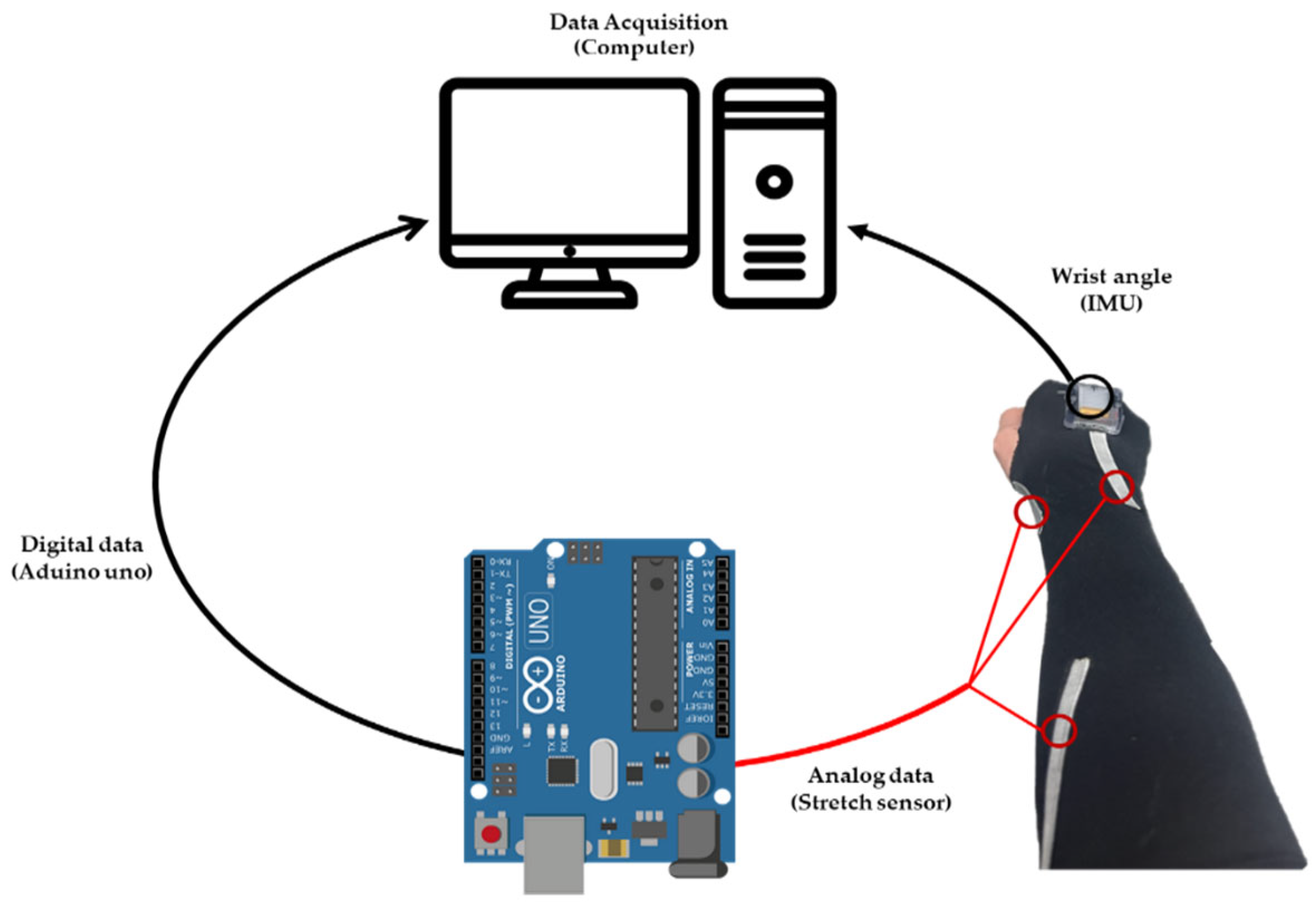
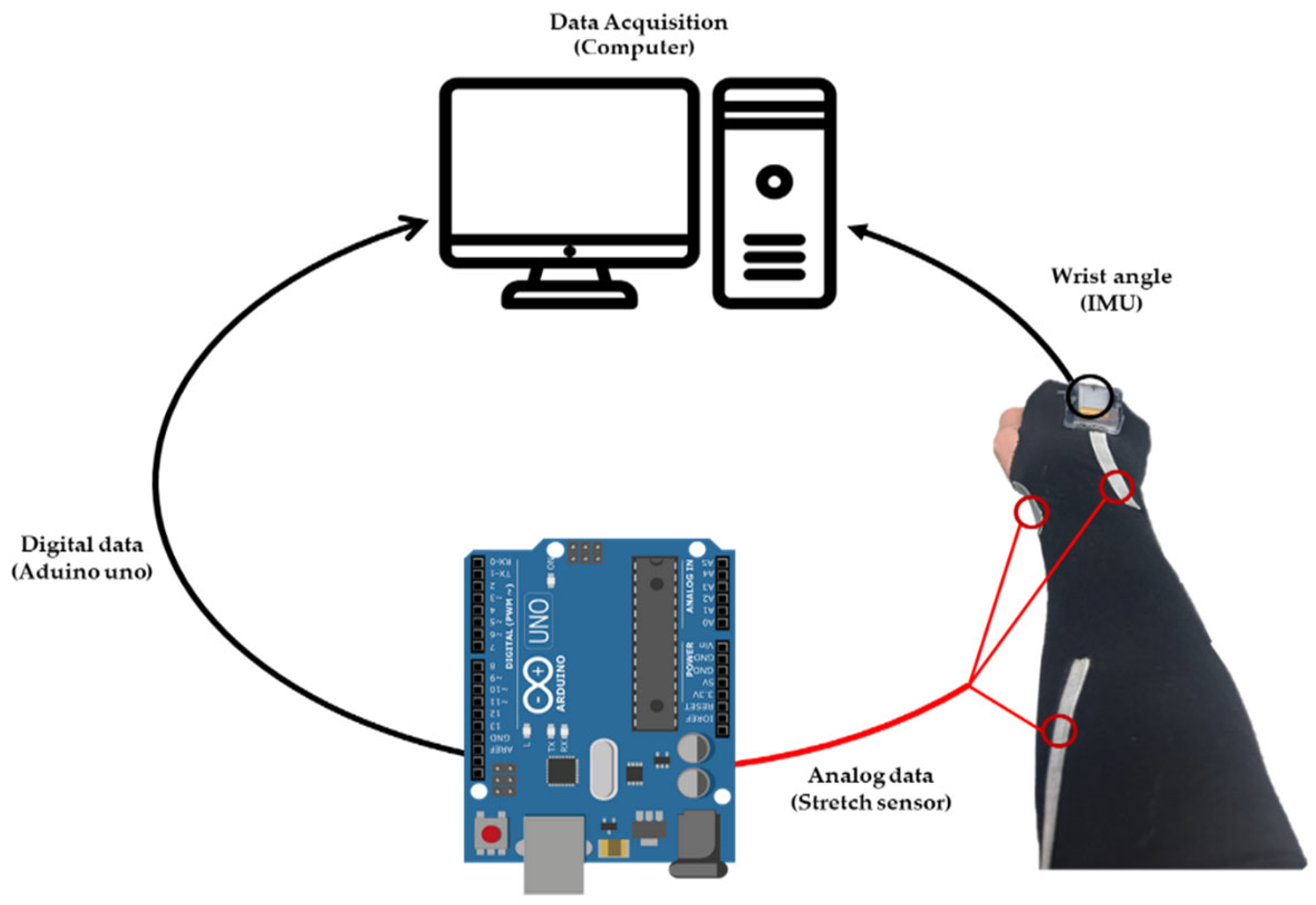
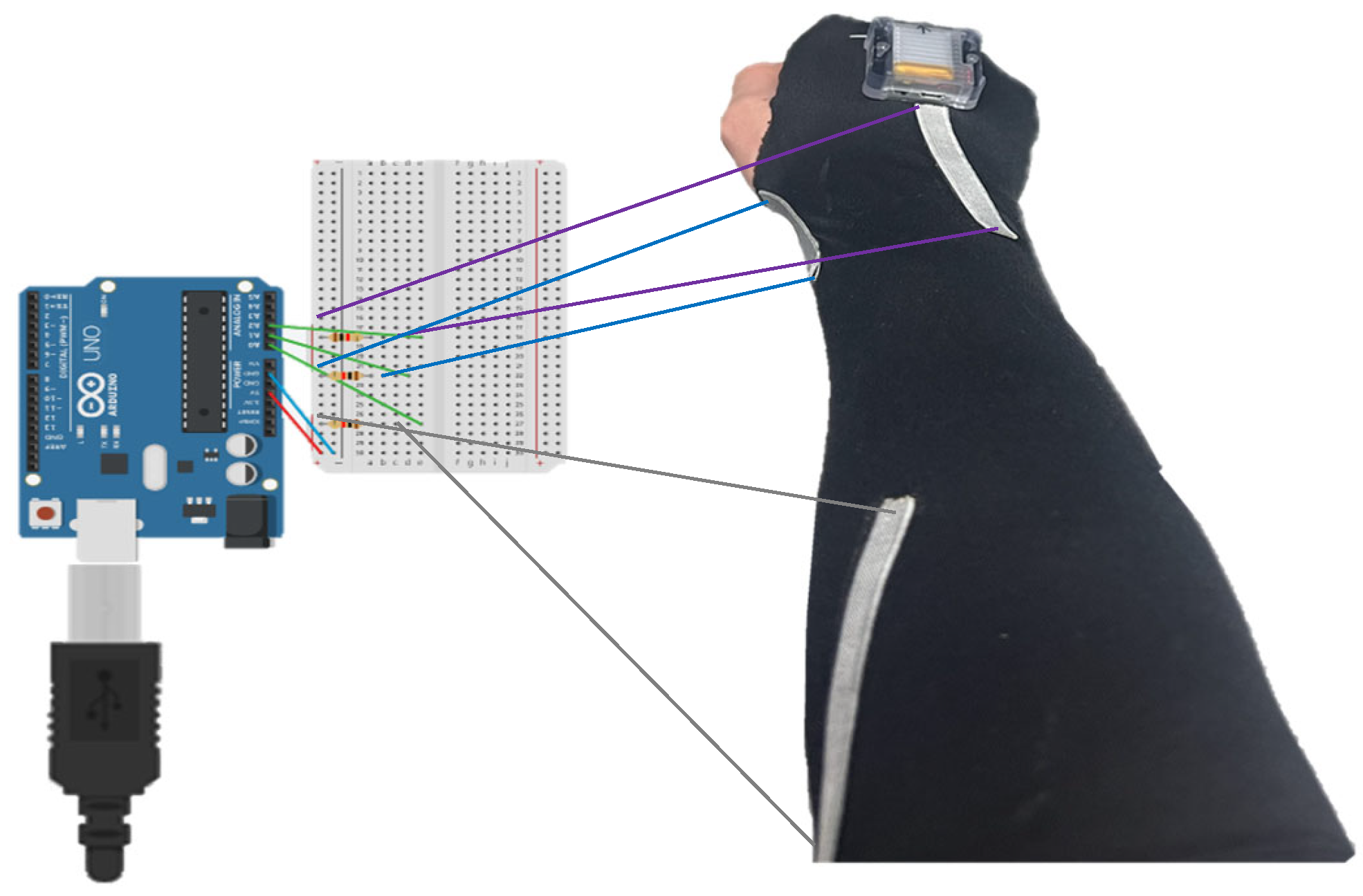
2.5. The Method of Obtaining Data for Stretch Sensors and IMU
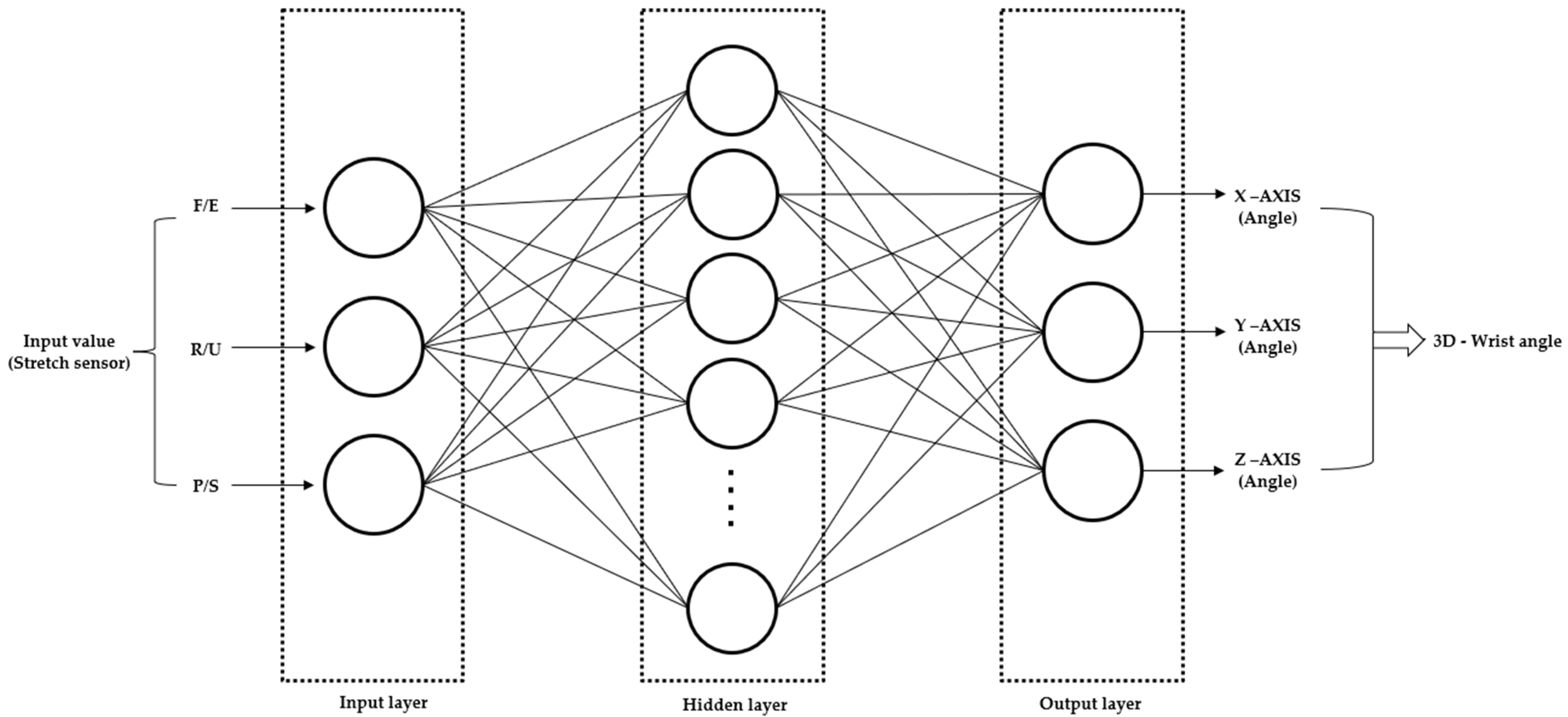
2.6. Multi-Layer Perceptron (MLP)
3. Results
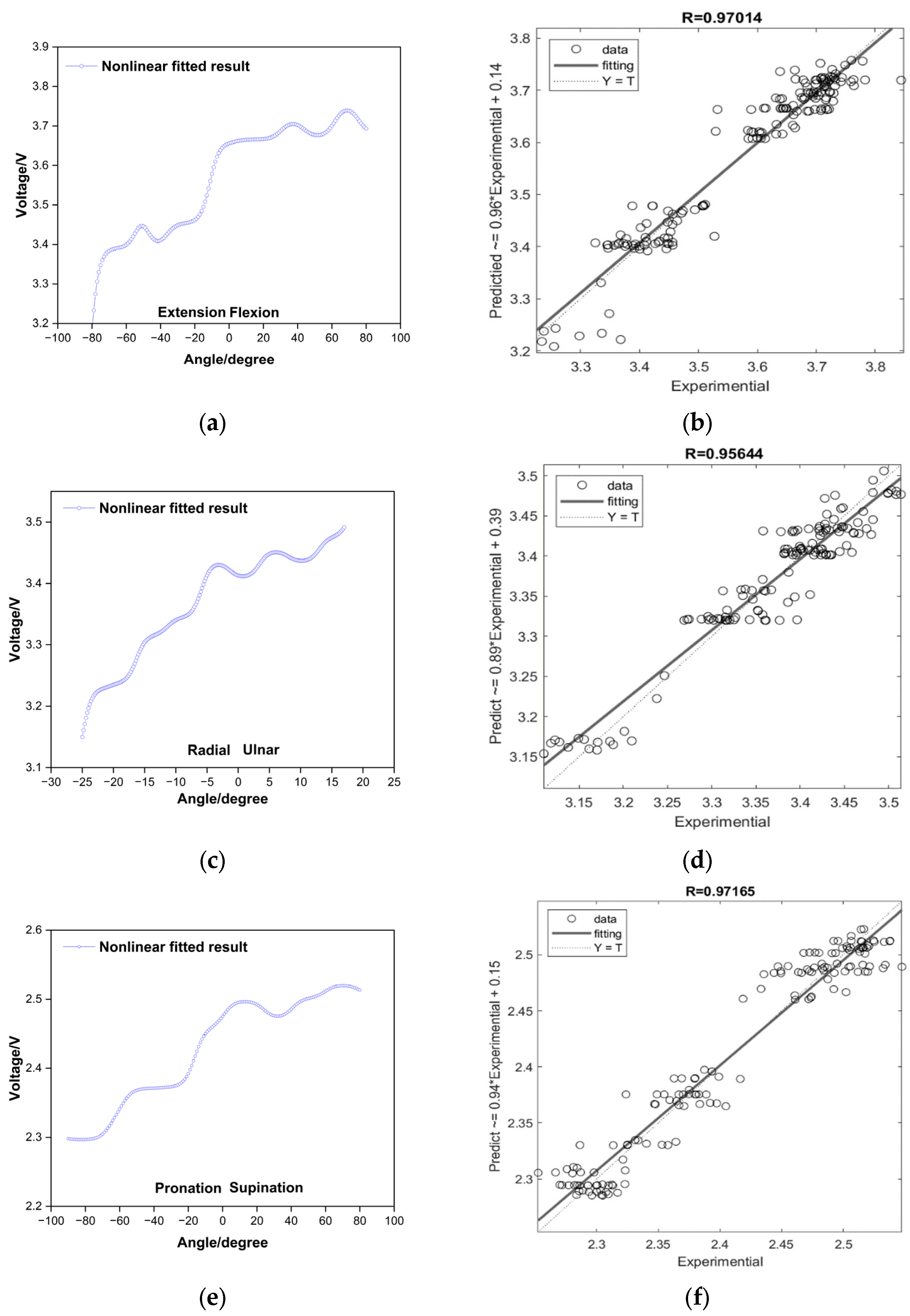
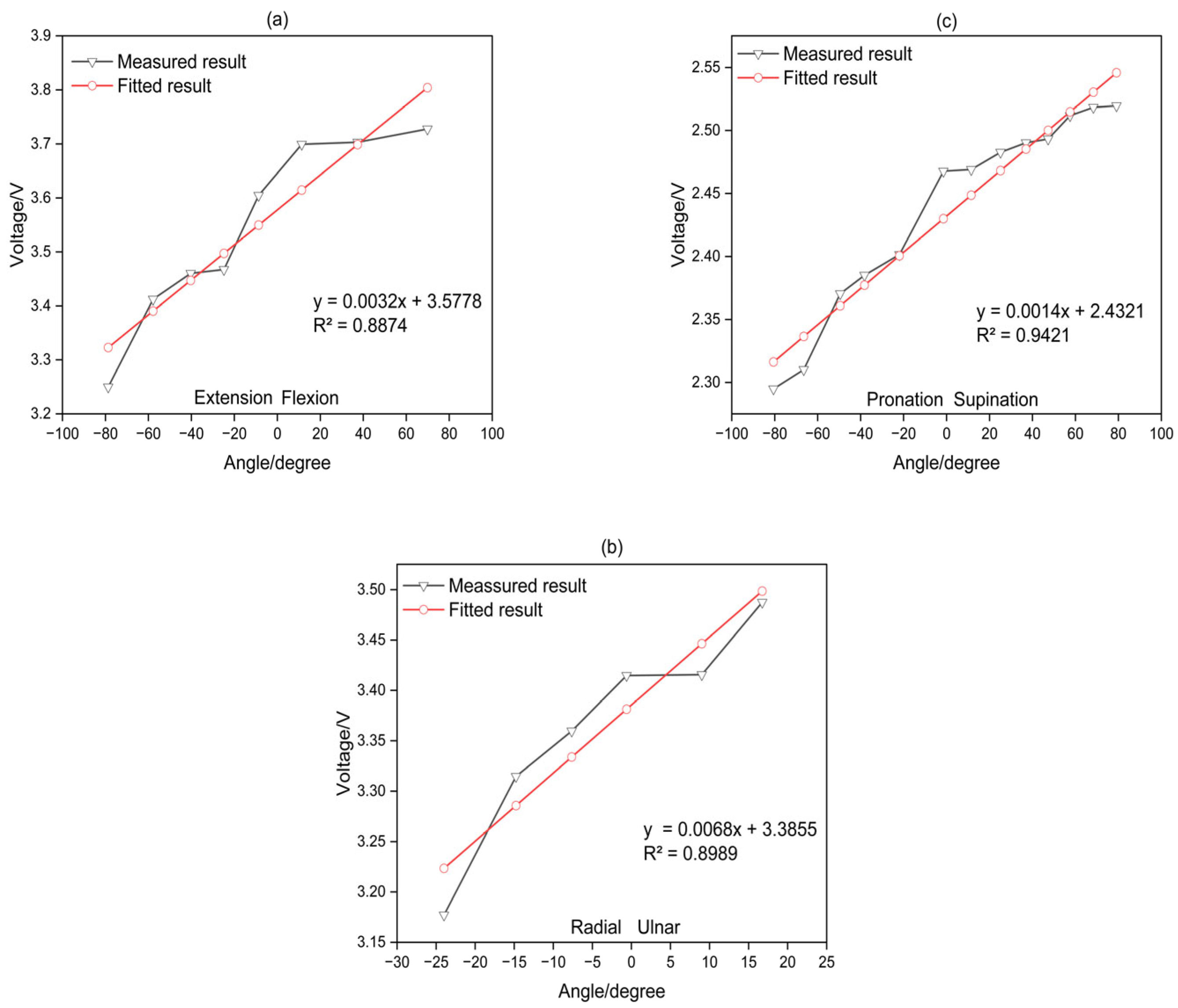
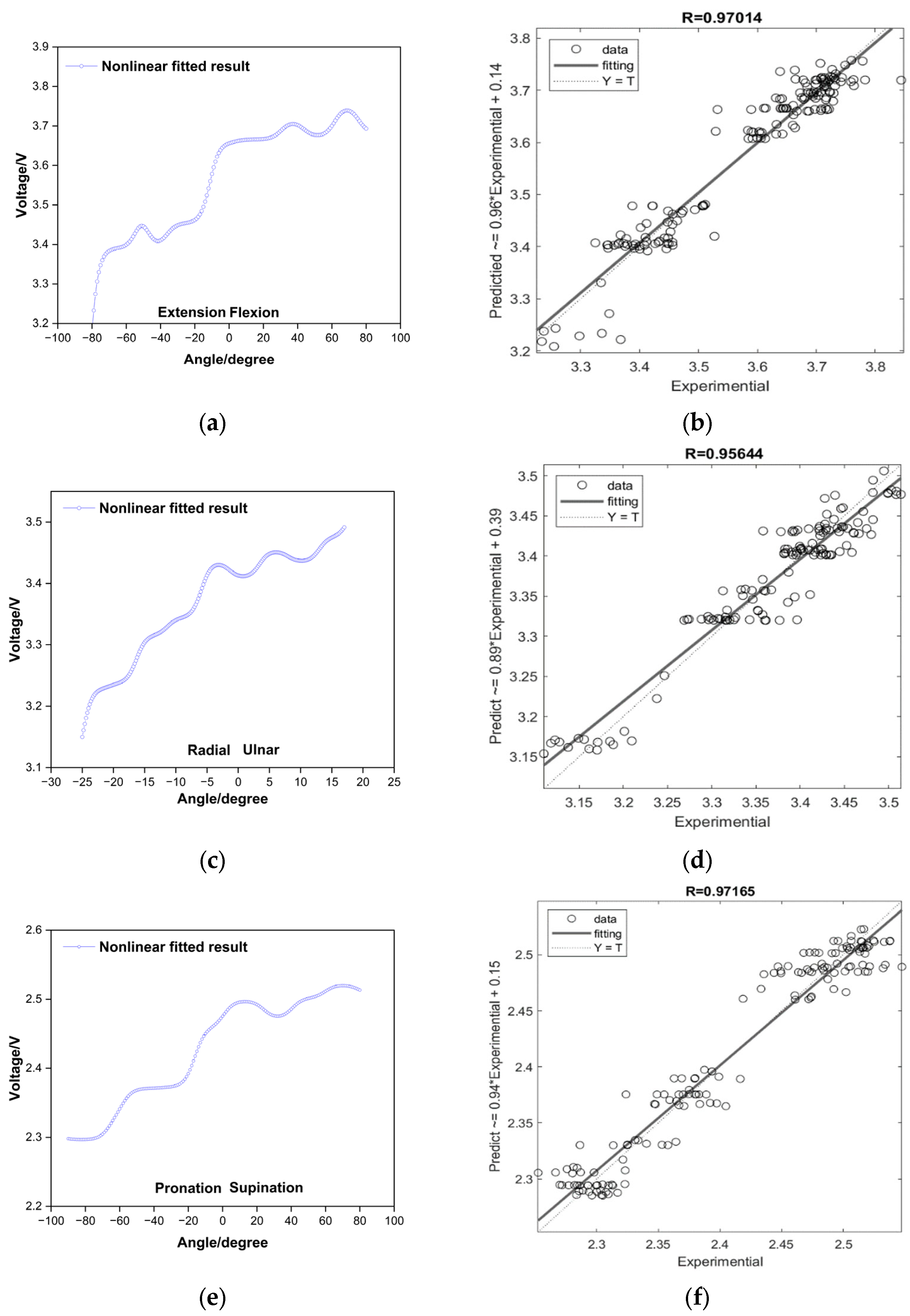
3.1. Linear Regression Analysis
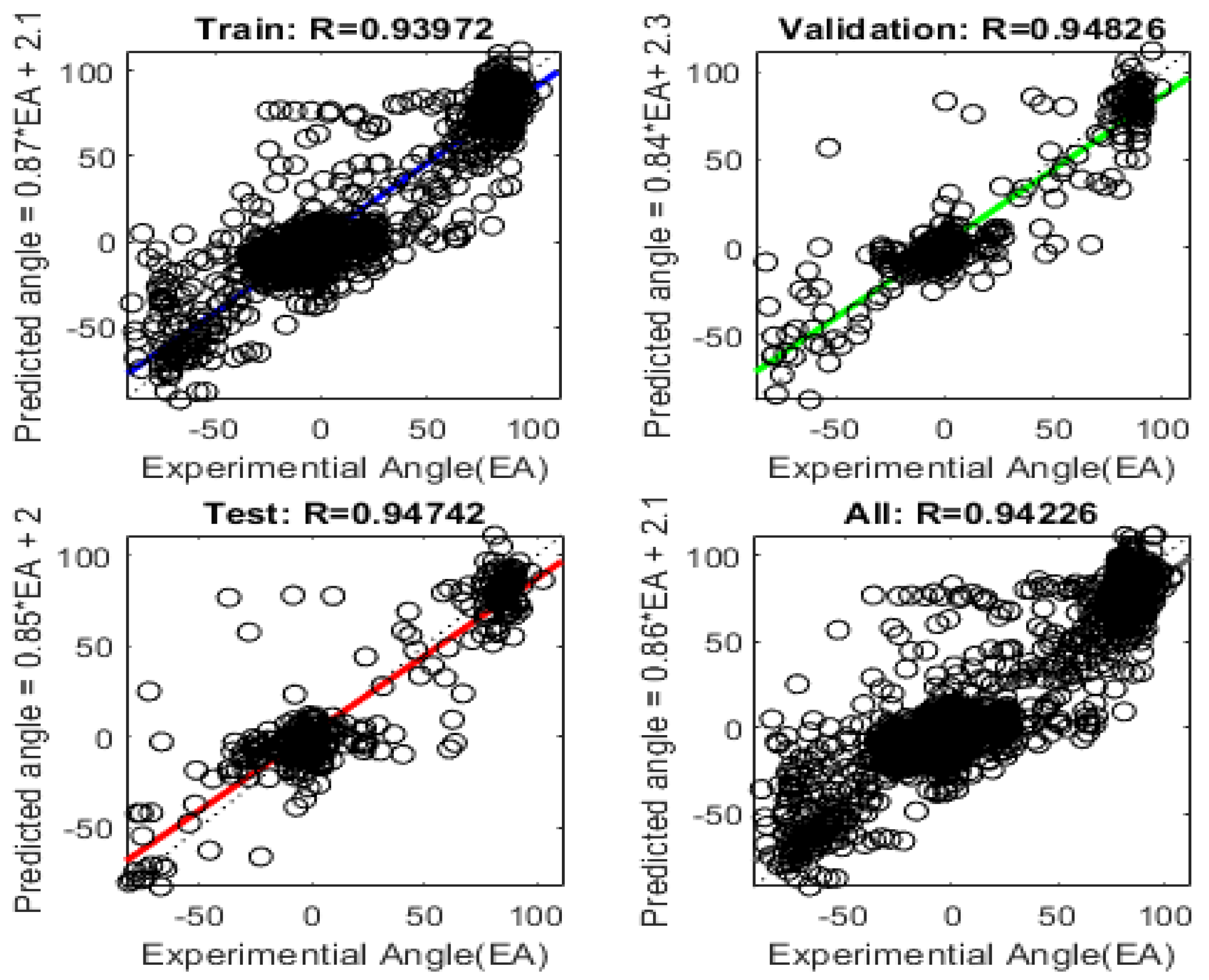
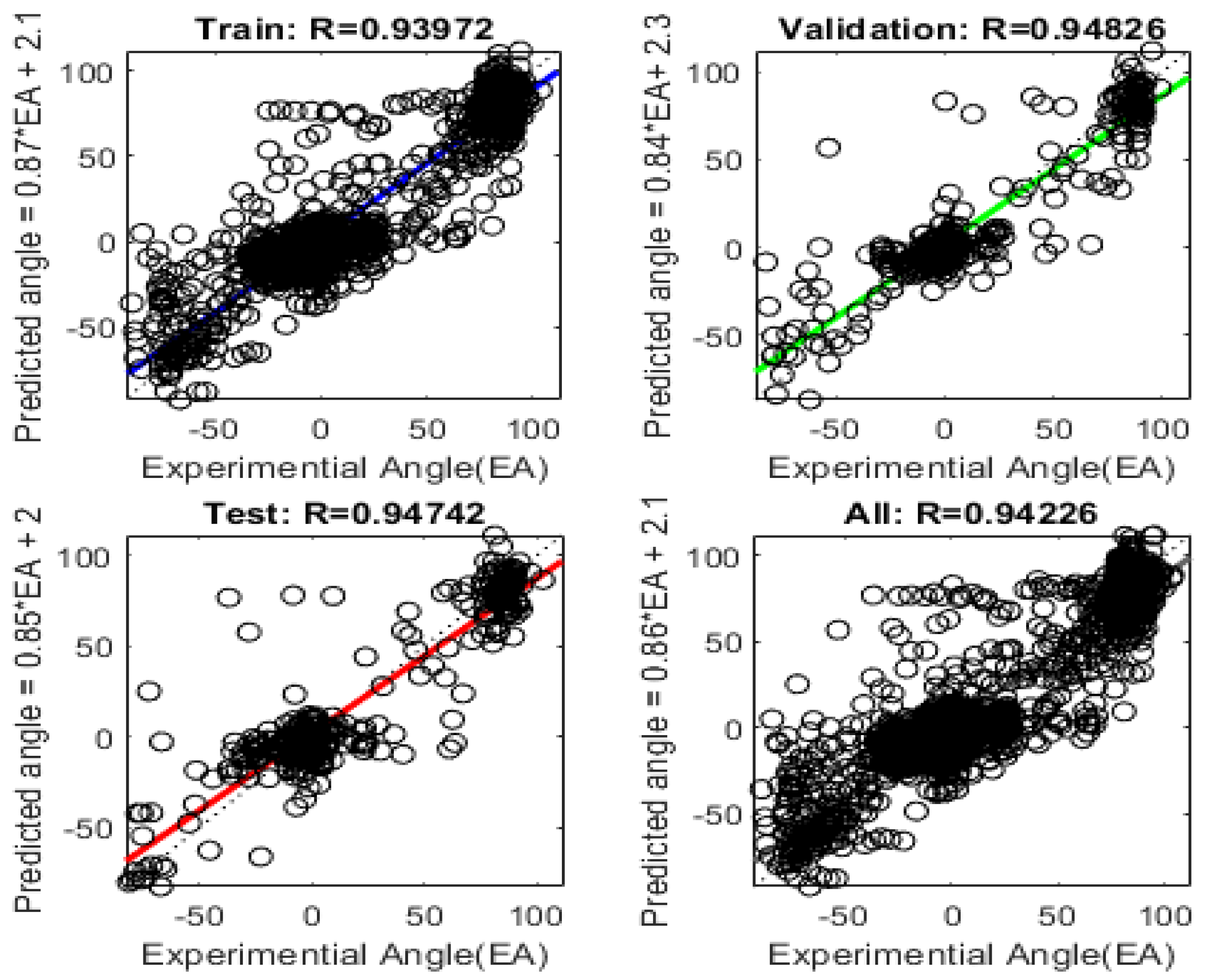
3.2. MLP Regression Analysis
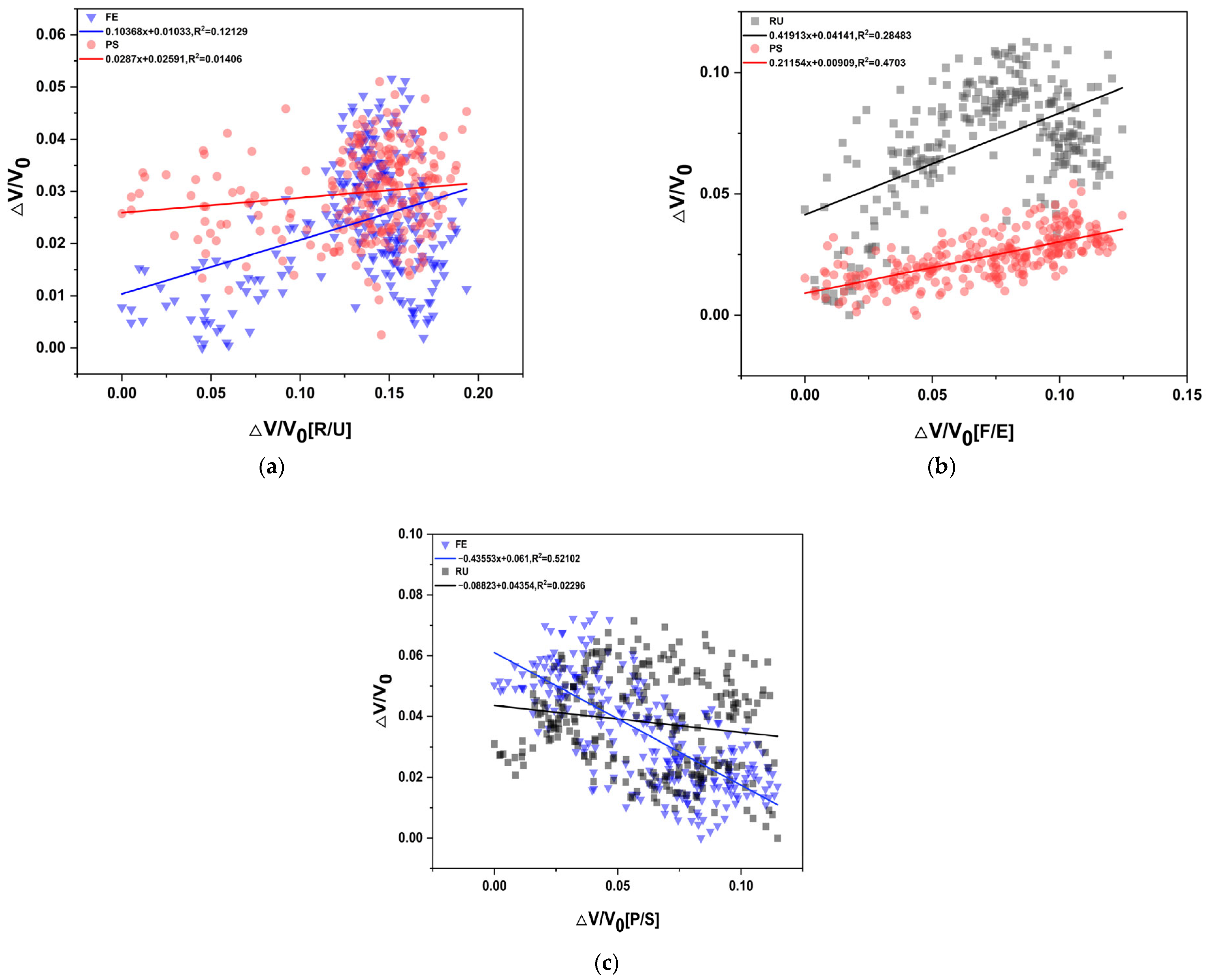
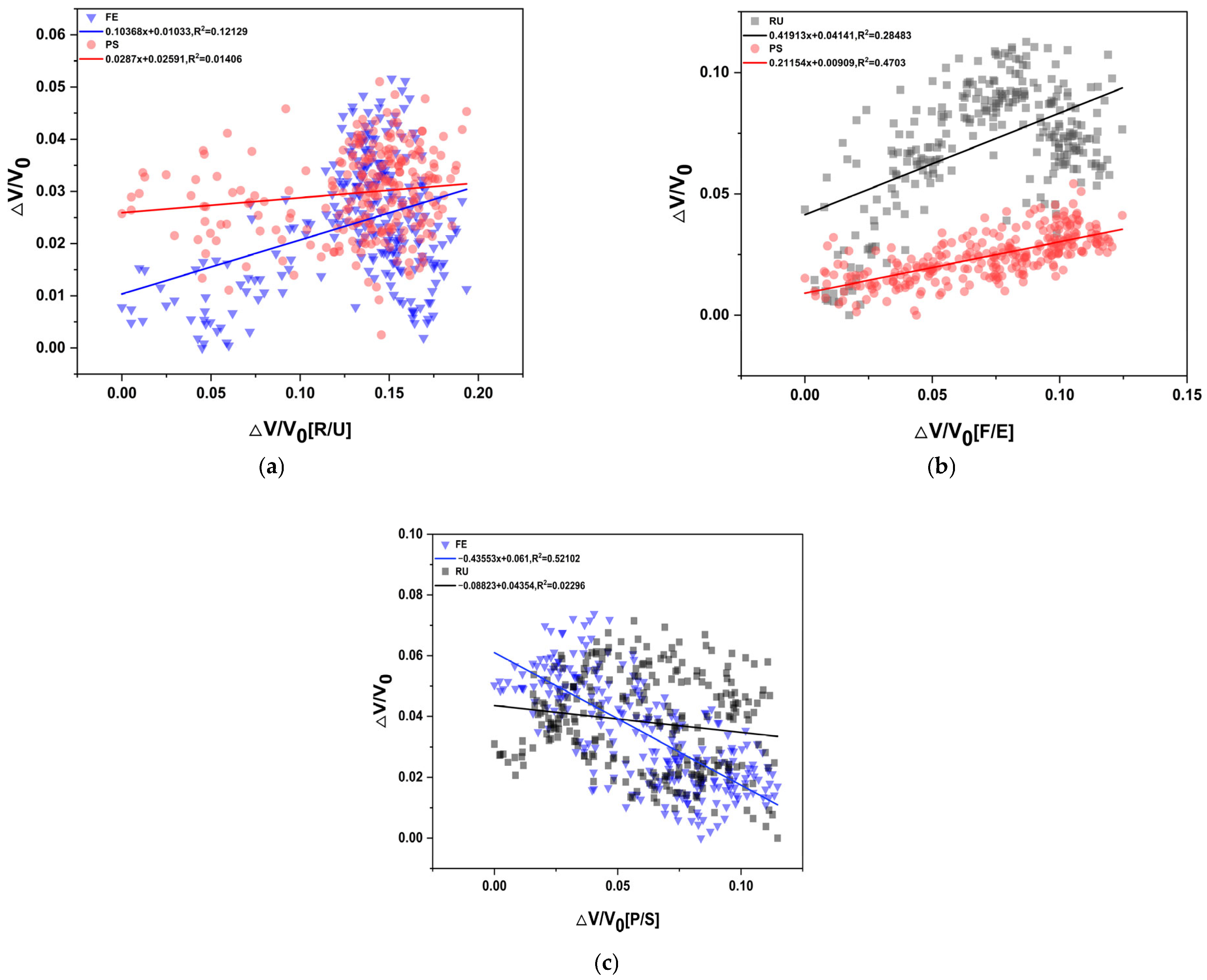
3.3. Coupling between the Each Motion
3.4. Three-Dimensional Wrist Angle Measurement Algorithm
3.5. Example of the 3D Wrist Angle Measurement Algorithm
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shi, B.; Chen, X.; Yue, Z.; Yin, S.; Weng, Q.; Zhang, X.; Wang, J.; Wen, W. Wearable ankle robots in post-stroke rehabilitation of gait: A systematic review. Front. Neurorobotics 2019, 13, 63. [Google Scholar] [CrossRef]
- Ran, B.; Zhang, F.; Yin, W. Investigation on relative factors of wrist and shoulder injuries in badminton sports. Chin. J. Clin. Rehabil. 2006, 10, 41–43. [Google Scholar]
- Gordon, B.J.; Dapena, J. Contributions of joint rotations to racquet speed in the tennis serve. J. Sports Sci. 2006, 24, 31–49. [Google Scholar] [CrossRef]
- Karasch, R.A.; Brown, F.A.; Smith, E.A.; Paske, W.C. Objective screening parameters for training-rehabilitation of sports teams. J. Clin. Eng. 2015, 40, 210–219. [Google Scholar] [CrossRef]
- Yeo, H.J. Data Analysis and Processing Methods of Magnetic Sensor for Measuring Wrist Gesture. J. Korea Acad.-Ind. Coop. Soc. 2020, 21, 28–36. [Google Scholar]
- Xing, T.; Yu, Y.; Zhou, Y.; Du, S. Markerless motion capture of human body using PSO with single depth camera. In Proceedings of the 2012 Second International Conference on 3D Imaging, Modeling, Processing, Visualization & Transmission, Zurich, Switzerland, 13–15 October 2012; pp. 192–197. [Google Scholar]
- Luinge, H.J.; Veltink, P.H. Measuring orientation of human body segments using miniature gyroscopes and accelerometers. Med. Biol. Eng. Comput. 2005, 43, 273–282. [Google Scholar] [CrossRef]
- Huang, B.; Li, M.; Mei, T.; McCoul, D.; Qin, S.; Zhao, Z.; Zhao, J. Wearable stretch sensors for motion measurement of the wrist joint based on dielectric elastomers. Sensors 2017, 17, 2708. [Google Scholar] [CrossRef]
- Zhou, H.; Stone, T.; Hu, H.; Harris, N. Use of multiple wearable inertial sensors in upper limb motion tracking. Med. Eng. Phys. 2008, 30, 123–133. [Google Scholar] [CrossRef]
- Zhao, Y.; Yin, L.J.; Zhong, S.L.; Zha, J.W.; Dang, Z.M. Review of dielectric elastomers for actuators, generators and sensors. Iet Nanodielectrics 2020, 3, 99–106. [Google Scholar] [CrossRef]
- Brochu, P.; Pei, Q. Advances in dielectric elastomers for actuators and artificial muscles. Macromol. Rapid Commun. 2010, 31, 10–36. [Google Scholar] [CrossRef]
- Li, Q.; Vatankhah-Varnoosfaderani, M.; Matyjaszewski, K.; Dobrynin, A.V.; Spontak, R.J.; Sheiko, S.S.; Zhushma, A.P.; Morgan, B.J.; Daniel, W.F.; Armstrong, D.P. Bottlebrush elastomers: A new platform for freestanding electroactuation. Adv. Mater. 2017, 29, 1–7. [Google Scholar] [CrossRef]
- Niu, X.; Stoyanov, H.; Hu, W.; Leo, R.; Brochu, P.; Pei, Q. Synthesizing a new dielectric elastomer exhibiting large actuation strain and suppressed electromechanical instability without prestretching. J. Polym. Sci. Part B Polym. Phys. 2013, 51, 197–206. [Google Scholar] [CrossRef]
- Yang, D.; Ge, F.; Tian, M.; Ning, N.; Zhang, L.; Zhao, C.; Ito, K.; Nishi, T.; Wang, H.; Luan, Y. Dielectric elastomer actuator with excellent electromechanical performance using slide-ring materials/barium titanate composites. J. Mater. Chem. A 2015, 3, 9468–9479. [Google Scholar] [CrossRef]
- Renard, C.; Wang, D.; Han, B.-Z.; Dang, Z.-M. Origin of large field-induced strain of azobenzene/polyurethane blend dielectric elastomers. RSC Adv. 2015, 5, 82215–82226. [Google Scholar] [CrossRef]
- Tian, M.; Yan, B.; Yao, Y.; Zhang, L.; Nishi, T.; Ning, N. Largely improved actuation strain at low electric field of dielectric elastomer by combining disrupting hydrogen bonds with ionic conductivity. J. Mater. Chem. C 2014, 2, 8388–8397. [Google Scholar] [CrossRef]
- Wang, J.; Wu, C.; Liu, R.; Li, S. Enhanced dielectric behavior in nanocomposites of polyurethane bonded with copper phthalocyanine oligomers. Polym. J. 2014, 46, 285–292. [Google Scholar] [CrossRef]
- Carpi, F.; Salaris, C.; De Rossi, D. Folded dielectric elastomer actuators. Smart Mater. Struct. 2007, 16, S300. [Google Scholar] [CrossRef]
- Kussmaul, B.; Risse, S.; Kofod, G.; Waché, R.; Wegener, M.; McCarthy, D.N.; Krüger, H.; Gerhard, R. Enhancement of dielectric permittivity and electromechanical response in silicone elastomers: Molecular grafting of organic dipoles to the macromolecular network. Adv. Funct. Mater. 2011, 21, 4589–4594. [Google Scholar] [CrossRef]
- Molberg, M.; Crespy, D.; Rupper, P.; Nüesch, F.; Månson, J.A.E.; Löwe, C.; Opris, D.M. High breakdown field dielectric elastomer actuators using encapsulated polyaniline as high dielectric constant filler. Adv. Funct. Mater. 2010, 20, 3280–3291. [Google Scholar] [CrossRef]
- Tan, M.W.M.; Thangavel, G.; Lee, P.S. Enhancing dynamic actuation performance of dielectric elastomer actuators by tuning viscoelastic effects with polar crosslinking. NPG Asia Mater. 2019, 11, 62. [Google Scholar] [CrossRef]
- Jang, J.C.; Park, J.H.; Kim, J.Y. Development of Stretch Sensors to Measure Thigh Motor Capacity. J. Fash. Bus 2021, 25, 99–113. [Google Scholar]
- Park, J.W.; Kim, T.; Kim, D.; Hong, Y.; Gong, H.S. Measurement of finger joint angle using stretchable carbon nanotube strain sensor. PLoS ONE 2019, 14, e0225164. [Google Scholar] [CrossRef]
- Cho, H.-S.; Yang, J.-H.; Lee, J.-H.; Lee, J.-H. Evaluation of joint motion sensing efficiency according to the implementation method of swcnt-coated fabric motion sensor. Sensors 2020, 20, 284. [Google Scholar] [CrossRef]
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef]
- Roh, E.; Hwang, B.-U.; Kim, D.; Kim, B.-Y.; Lee, N.-E. Stretchable, transparent, ultrasensitive, and patchable strain sensor for human–machine interfaces comprising a nanohybrid of carbon nanotubes and conductive elastomers. ACS Nano 2015, 9, 6252–6261. [Google Scholar] [CrossRef]
- Zhou, J.; Yu, H.; Xu, X.; Han, F.; Lubineau, G. Ultrasensitive, stretchable strain sensors based on fragmented carbon nanotube papers. ACS Appl. Mater. Interfaces 2017, 9, 4835–4842. [Google Scholar] [CrossRef]
- Vogt, D.M.; Wood, R.J. Wrist angle measurements using soft sensors. In Proceedings of the SENSORS, Valencia, Spain, 2–5 November 2014; pp. 1631–1634. [Google Scholar]
- Chun, S.H.; Kim, S.H.; Kim, J.Y. Development of Wrist Tunnel Syndrome Prevention Smart Gloves using CNT-based Tensile Fabric Sensor: Focusing on Mouse Use. Sci. Emot. Sensib. 2021, 24, 117–128. [Google Scholar] [CrossRef]
- Yun, H.-y.; Kim, S.-U.; Kim, J.-Y. Carbon-nanotube-based spacer fabric pressure sensors for biological signal monitoring and the evaluation of sensing capabilities. Sci. Emot. Sensib. 2021, 24, 65–74. [Google Scholar] [CrossRef]
- Mao, Y.; Yan, L.; Guo, H.; Hong, Y.; Huang, X.; Yuan, Y. A Hybrid Human Activity Recognition Method Using an MLP Neural Network and Euler Angle Extraction Based on IMU Sensors. Appl. Sci. 2023, 13, 10529. [Google Scholar] [CrossRef]
- Itano, F.; de Sousa, M.A.d.A.; Del-Moral-Hernandez, E. Extending MLP ANN hyper-parameters Optimization by using Genetic Algorithm. In Proceedings of the 2018 International joint conference on neural networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Bergstra, J.; Bardenet, R.; Bengio, Y.; Kégl, B. Algorithms for hyper-parameter optimization. In Proceedings of the Twenty-Fifth Annual Conference on Neural Information Processing Systems (NIPS), Granada, Spain, 12–17 December 2011; Volume 24. [Google Scholar]
- Yu, T.; Zhu, H. Hyper-parameter optimization: A review of algorithms and applications. arXiv 2020, arXiv:2003.05689. [Google Scholar]
- Najah, A.; El-Shafie, A.; Karim, O.; Jaafar, O.; El-Shafie, A.H. An application of different artificial intelligences techniques for water quality prediction. Int. J. Phys. Sci. 2011, 6, 5298–5308. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Output Voltage/V | Angular Error |Predicted Angle − Actual Angle|/Degree | |||||
|---|---|---|---|---|---|---|
| F/E | R/U | P/S | No. 1 | No. 2 | No. 3 | |
| 1 | 3.3378 | 3.2248 | 2.4724 | 6.57 | 6.23 | 1.57 |
| 2 | 3.3444 | 3.2537 | 2.4547 | 2.71 | 7.61 | 2.79 |
| 3 | 3.6414 | 3.2433 | 2.4668 | 7.92 | 3.63 | 4.22 |
| 4 | 3.7235 | 3.4021 | 2.4717 | 0.91 | 2.61 | 10.57 |
| 5 | 3.5070 | 3.4497 | 2.5022 | 4.71 | 1.69 | 5.88 |
| 6 | 3.5083 | 3.4040 | 2.4794 | 6.46 | 0.15 | 1.75 |
| 48 | 3.7188 | 3.4201 | 2.3704 | 6.92 | 3.60 | 0.05 |
| 49 | 3.7362 | 3.4405 | 2.4855 | 4.91 | 2.15 | 3.94 |
| 50 | 3.7374 | 3.5114 | 2.5121 | 4.69 | 2.62 | 8.14 |
| Mean error | 4.06 | 4.23 | 4.32 | |||
| SD | 2.23 | 2.53 | 3.17 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-H.; Koo, B.-H.; Kim, S.-U.; Kim, J.-Y. Measurement of 3D Wrist Angles by Combining Textile Stretch Sensors and AI Algorithm. Sensors 2024, 24, 1685. https://doi.org/10.3390/s24051685
Kim J-H, Koo B-H, Kim S-U, Kim J-Y. Measurement of 3D Wrist Angles by Combining Textile Stretch Sensors and AI Algorithm. Sensors. 2024; 24(5):1685. https://doi.org/10.3390/s24051685
Chicago/Turabian StyleKim, Jae-Ha, Bon-Hak Koo, Sang-Un Kim, and Joo-Yong Kim. 2024. "Measurement of 3D Wrist Angles by Combining Textile Stretch Sensors and AI Algorithm" Sensors 24, no. 5: 1685. https://doi.org/10.3390/s24051685
APA StyleKim, J.-H., Koo, B.-H., Kim, S.-U., & Kim, J.-Y. (2024). Measurement of 3D Wrist Angles by Combining Textile Stretch Sensors and AI Algorithm. Sensors, 24(5), 1685. https://doi.org/10.3390/s24051685