1. Introduction
The earth is abundant in marine resources. With the advancements in human productivity and technology, there is a growing interest in utilizing, developing, and protecting the ocean [
1,
2,
3,
4]. In underwater signal transmission, acoustic signals serve as the primary carriers of information. However, underwater acoustic signals frequently exhibit non-stationary and nonlinear characteristics. Therefore, the key challenge lies in extracting information from non-stationary nonlinear signals [
5,
6]. Most traditional methods for extracting features from underwater acoustic signals involve converting the signals from the time domain to the frequency domain and extracting the spectral features. Short-time Fourier transform and Wigner–Ville distribution fail to adequately capture the relationship between signal frequency and time. Despite its ability to provide time–frequency information, the wavelet transform is limited by the choice of wavelet basis function [
7,
8]. While these methods have shown some success in practical applications, characterizing the nonlinearity of underwater acoustic signals remains challenging. Consequently, the traditional signal-processing methods are limited in their ability to address the nonlinear characteristics of underwater acoustic signals. Thus, there is a need to propose a new method for characterizing these nonlinear characteristics.
With the advancement of nonlinear science theory, fractal dimension (FD) has been proposed, but the traditional FD cannot represent the complexity information of multi-channel time series. Therefore, Yuxing Li et al. [
9] proposed multivariate multiscale HFD (MvmHFD). And the concept of information entropy, which quantifies the complexity and randomness of signals, has been introduced. Entropy measures such as approximate entropy (AE) [
10,
11], SE [
12,
13], FE [
14,
15], PE [
16,
17], and DE [
18,
19] have found extensive applications in the field of underwater acoustic signal recognition. The scope of entropy measurement methods has expanded over time, giving rise to various types. For instance, Costa proposed multiscale entropy (MSE) [
20,
21], which assesses the complexity of time series across different scales. Building upon MSE, Jinde Zheng et al. introduced multiscale permutation entropy (MPE) [
22,
23], multiscale fuzzy entropy (MFE) [
24,
25], and adaptive multiscale dispersion entropy (AMDE) [
26,
27]. Based on SE and MSE, Keheng Zhu et al. presented a hierarchical entropy (HE) method [
28]. This approach involves hierarchical data decomposition, using sample entropy at each decomposition node to construct feature vectors, which are then used for fault identification through support vector machine techniques. Yongbo Li et al. proposed hierarchical fuzzy entropy (HFE) [
29], a hierarchical analysis combined with fuzzy entropy calculation. Unlike MFE, HFE analyzes both low-frequency and high-frequency signal components, enabling more comprehensive and accurate information extraction. Yuxing Li et al. [
30] developed a variable-step multiscale KFD (VSMKFD) to extract ship radiated noise features.
In 2019, David CuestaFra proposed a novel time series complexity estimator known as slope entropy (SlEn) [
31,
32]. Due to its significant impact on classification, SlEn has been widely used in various fields. Its effectiveness has been verified in disciplines such as medicine, hydroacoustics, and fault diagnosis. For example, Dakappa Pradeepa H et al. [
33] conducted a time series analysis of fever using SlEn, while CuestaFra David et al. [
34] applied SlEn to classify activity records of bipolar disorder patients. In the field of underwater acoustic signal recognition, SlEn offers a comprehensive representation of the nonlinear characteristics of underwater acoustic signals, surpassing conventional entropy methods like Apen and SE. Furthermore, as SlEn incorporates two threshold parameters that influence its performance [
35,
36], Li Yuxing et al. [
37] proposed the PSO-SlEn algorithm, which employs an optimization algorithm to determine these parameters. In the context of PSO, Li Wei et al. [
38] introduced the concept of quantum behavior and proposed a variant called quantum-behaved particle swarm optimization (QPSO). The effectiveness of PSO was further demonstrated by Gao Yonglin et al. [
39] in improving the performance of the LS-SVM model. This paper presents the BWO-SlEn algorithm for feature extraction in underwater acoustic signals.
With the development of machine-learning algorithms, we can classify the features of the extracted signals through 1D-CNN [
40,
41], and the effective features can be automatically learned through training, thus achieving better classification results. Therefore, the recognition method of BWO-SlEn and 1D-CNN is proposed in this paper and applied to underwater acoustic signal recognition.
The structure of this paper is divided into the following parts.
Section 2 detail the algorithmic principle and steps of the proposed method, respectively.
Section 3 and
Section 4 demonstrate the recognition experiments and analysis of noises and SSS, respectively. Finally, in
Section 5, the innovation and experimental conclusions of this paper are discussed.
2. Algorithms
2.1. Slope Entropy
SlEn is a complexity estimator for time series data that quantifies the complexity of a signal. It is a nonlinear dynamic indicator calculated solely based on the magnitude and five moments of the time series. A higher value of SlEn indicates a more complex signal, while a lower value suggests a simpler signal. The complete calculation procedure for SlEn is provided below:
Step 1: For a given time series,
, where
indicates the number of elements in a time series. Then, set the embedding dimension,
. The time series,
, can be divided into
subseries. The decomposition form of the time series,
, is as follows:
Step 2: For all subsequences obtained in (1), subtract the former from the latter of the two adjacent elements to obtain k new sequences:
Each of the k new sequences in (2) contains elements, which are .
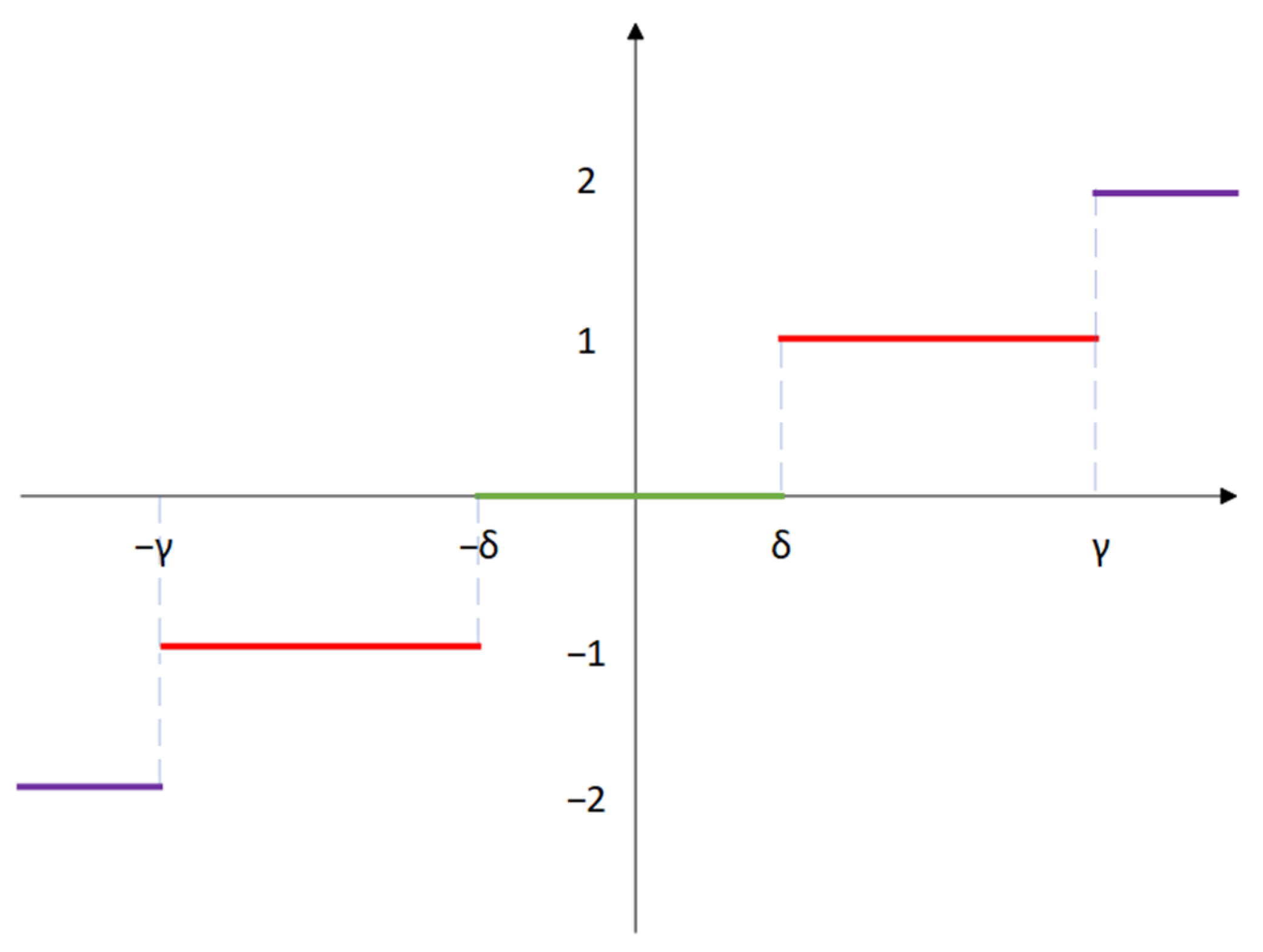
Step 3: Introduce the two SlEn threshold parameters,
and
. Here,
. Using the threshold parameters
,
,
, and
as the dividing line, the numeric field is divided into five modules, namely −2, −1, 0, 1, and 2, and all elements in the sequence obtained from Step 2 are compared to these two thresholds. If
, it is divided into module −2. If
, it is divided into module −1. If
, it is divided into module 0. If
, it is divided into module 1. If
, it is divided into module 2. The principle of module division is shown in
Figure 1:
The partition sequence form is as follows:
Each element of in (3) is one of the five modules, −2, −1, 0, 1, and 2.
Step 4: Since there are five modules, there are, at most,
types of sequence
. For example, when
is 3, there are, at most, 25 types of
. These are {2,2}, {2,1}, {2,0}, {2,−1}, {2,−2}, …, {−2,−1}, and {−2,−2}; the number of each type is recorded as
, and the frequency of each type is calculated as follows:
Step 5: Based on the classical Shannon entropy, the formula of SlEn is defined as follows:
where
is obtained from (4).
2.2. Beluga Whale Optimization
The BWO [
42] algorithm is an optimization based on the bionics idea, which simulates the predation and mating behavior of the beluga whale population. It can be utilized for function optimization, machine learning, and neural networks. The following are the complete steps of the BWO algorithm:
- (1)
First, an appropriate optimization problem is selected and transformed into a mathematical model. The determination of whether the target necessitates a minimum or maximum value, as well as the identification of the optimization variables, is required.
- (2)
Initializing the beluga population. Specifically, beluga whale individuals are randomly generated, each containing optimization variables, which can be represented by a d-dimensional vector.
- (3)
The fitness value of each individual beluga is calculated. Specifically, the optimization variable of each individual is substituted into the objective function to obtain the corresponding fitness value.
- (4)
The beluga population members are ranked based on their fitness values. Specifically, the individual beluga whale with the highest fitness value is referred to as the “leader” individual.
- (5)
The positions and speeds of the remaining beluga whales are updated based on the position and speed information of the leader.
- (6)
The fitness value of the updated beluga whale population is recalculated, while the global historical optimal solution is updated.
- (7)
Determine whether the maximum number of iterations has been reached. If it is satisfied, the optimal solution is generated, and the algorithm ends. Otherwise, go back to Step 4 and continue the iteration.
2.3. Beluga Whale Optimization–Slope Entropy
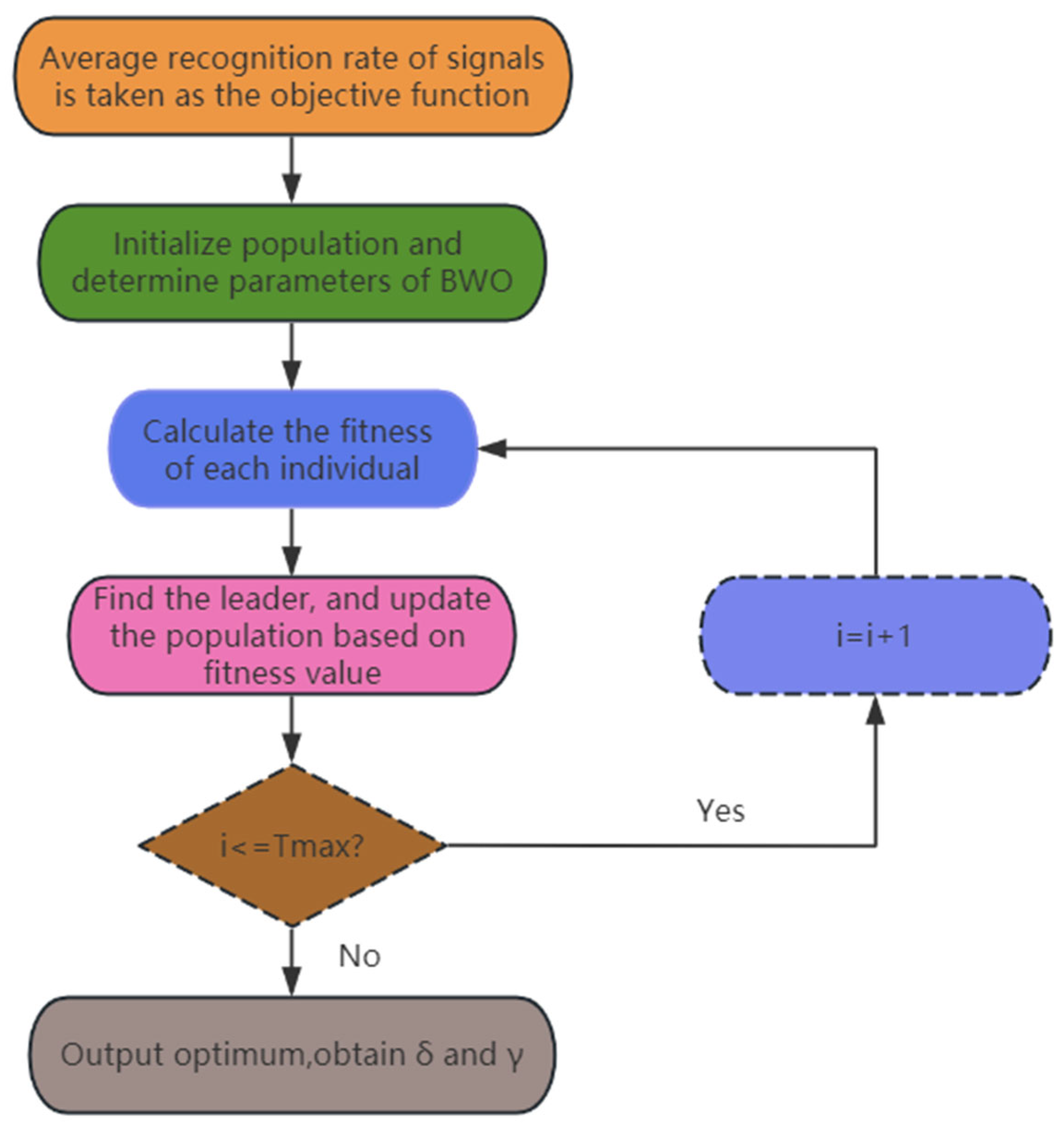
BWO-SlEn is an improvement of SlEn, and its basic idea is to optimize the two threshold parameters of an SlEn through an optimization algorithm. According to this idea, the signal recognition methods of BWO-SlEn and 1D-CNN are proposed in this paper. The basic steps are as follows:
Step 1: The average recognition rate of 1D-CNN recognition signals is taken as the objective function, and the two independent variables of the function are , and .
Step 2: Algorithm initialization. Set the population quantity as “noop” and the maximum number of iterations as “Tmax”. Seek the values of and corresponding to the maximum average recognition rate.
Step 3: Calculate the fitness (average recognition rate) of each individual, find the individual with the highest fitness, and designate it as the “leader” individual.
Step 4: According to the position and speed information of the leader, the BWO algorithm is used to update the position and speed of other individuals.
Step 5: If the maximum number of iterations, Tmax, has not been reached, iterate once more from Step 3 in order to identify the individual displaying the highest level of fitness.
Step 6: After reaching the maximum number of iterations, Tmax, output the iteration time and the two parameter values represented by the individual with the highest fitness.
The flow of the BWO-SlEn algorithm is shown in
Figure 2.
2.4. One Dimensional Convolutional Neural Network
A 1D-CNN [
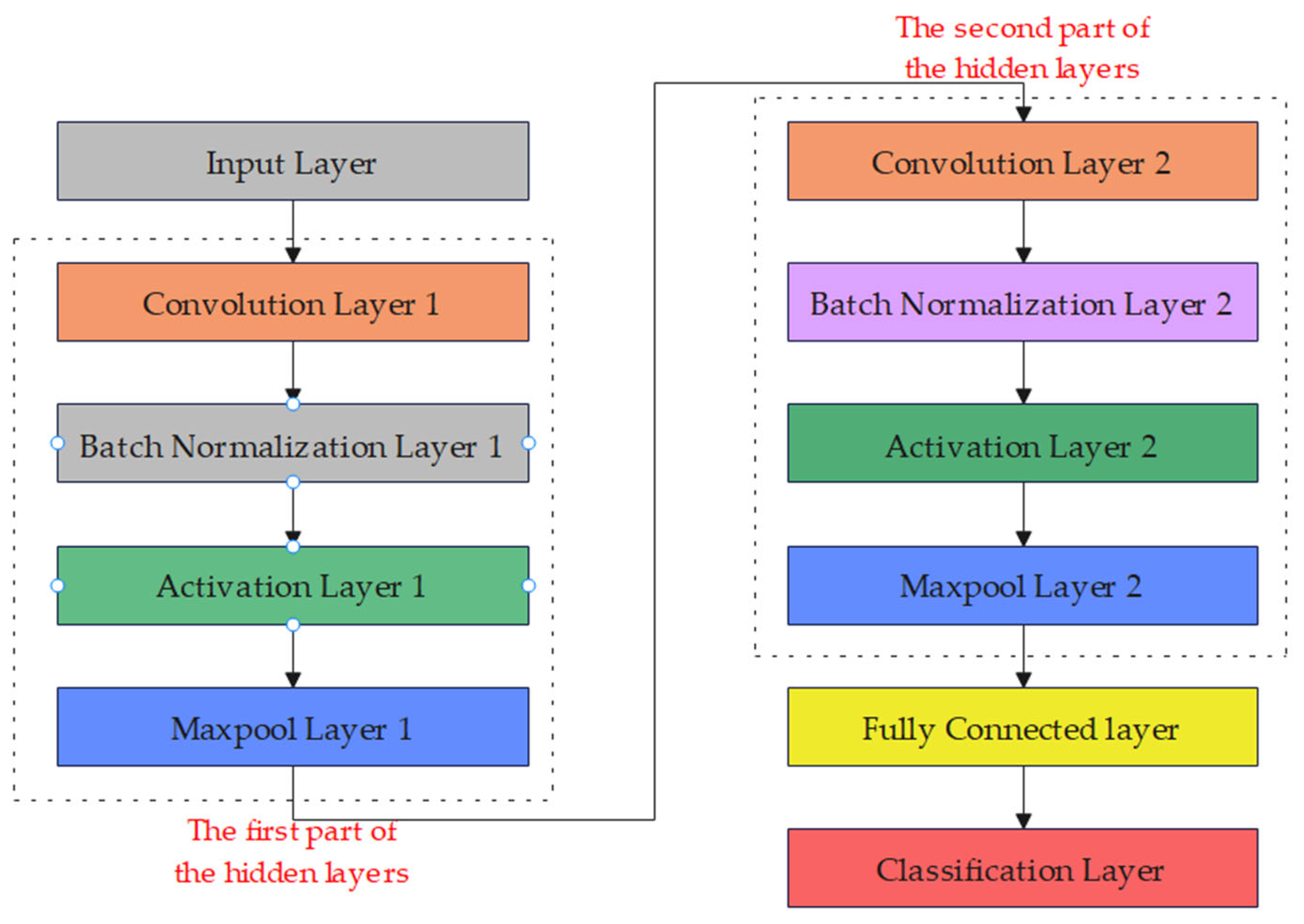
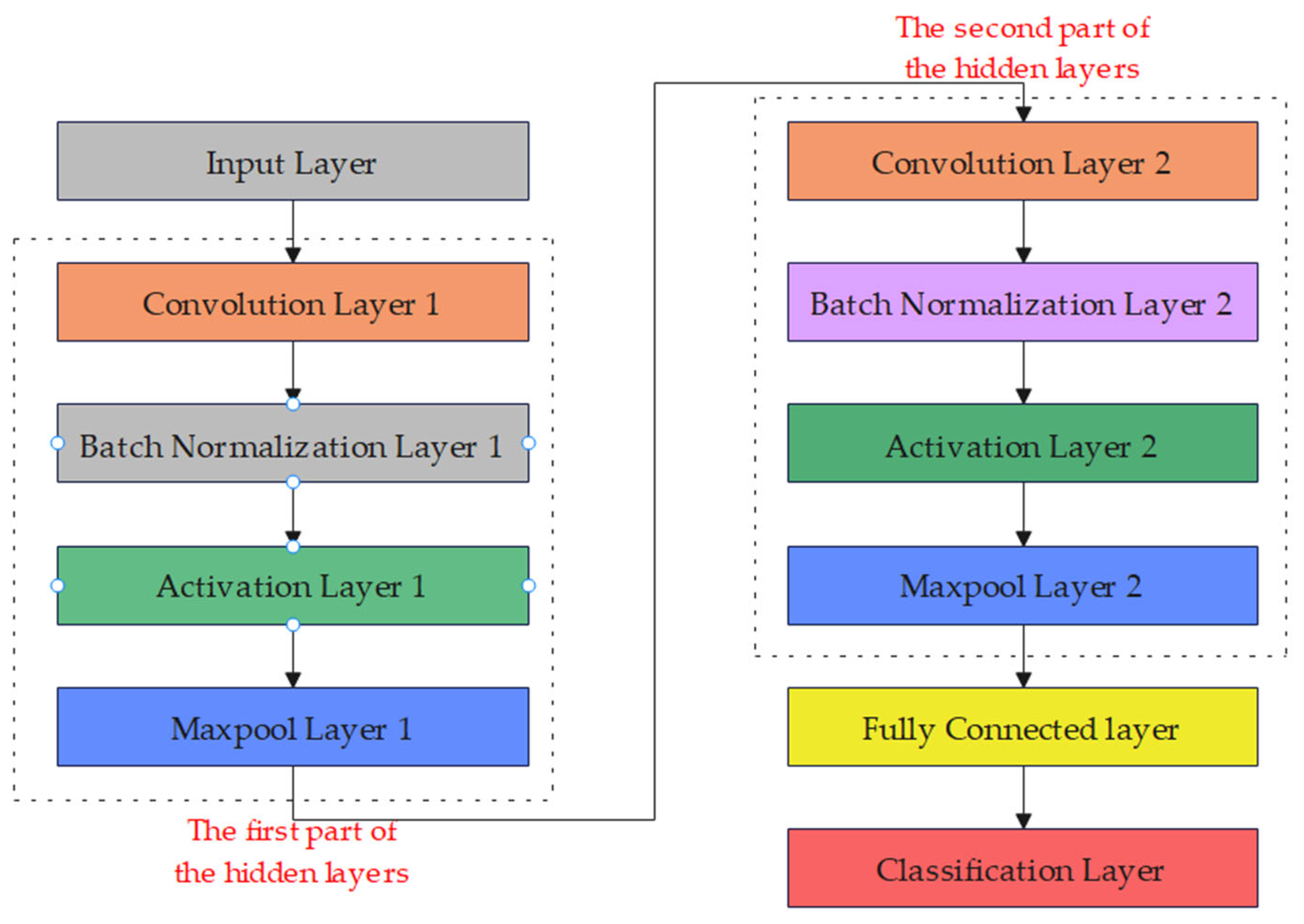
43] is a variant of the convolutional neural network. The 1D-CNN is mainly used to process one-dimensional sequence data. Compared with traditional fully connected neural networks, the 1D-CNN can better deal with local relationships in sequence data. The network structure used in this study is shown in
Figure 3.
The dimension of the input data for the input layer is 15. The first part of the hidden layer is configured as follows: The convolutional layer consists of 64 convolutional kernels with a size of 2. The batch normalization layer performs batch normalization on the output of convolutional layer. The activation layer applies the rectified linear unit (ReLU) function to activate the output of the convolutional layer. The window size of the max pooling layer in the time dimension is 2, with a stride of 1. The second part of the hidden layer is much the same as the first, except convolutional layer 2 contains 32 convolutional kernels with a size of 2. The output size of the fully connected layer is 4, corresponding to 4 categories. The classification layer performs classification on the output and obtains the final prediction result.
The training parameters and configuration of the neural network are summarized as follows: the network parameters are updated by using the Adam gradient descent algorithm; a maximum of 500 epochs are conducted; the initial learning rate is set to 0.0001; L2 regularization parameter of 0.0001 is applied; the learning rate is decreased using a piecewise linear decay strategy, with the learning rate reduced to 0.1 times its original value after every 450 epochs; and before each epoch, the training set samples are shuffled.
2.5. The Recognition Method Based on Beluga Whale Optimization–Slope Entropy and One-Dimensional Convolutional Neural Network
Combining BWO-SlEn and 1D-CNN, a new SSS recognition method is proposed, BWO-SlEn is used for feature extraction, and 1D-CNN is used to classify the extracted features. The specific steps of the proposed method are as follows:
Step 1: The SSSs are divided into signal samples for feature extraction. In this paper, four types of SSSs are divided into samples, and each SSS type has 3000 signal samples, with each sample containing 4096 data points.
Step 2: The signal samples of the SSSs are calculated by BWO-SlEn. In this paper, four types of SSS signal samples are calculated, each type of SSS to obtain 3000 feature samples, a total of 12,000 feature samples.
Step 3: The feature samples are input into the neural network for classification. In this paper, the 3000 feature samples of each type of SSS are reset to a 200 × 15 matrix and then input to 1D-CNN.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}