
Augmented Reality-Based Real-Time Visualization for Structural Modal Identification



Abstract
1. Introduction
1.1. Motivation
1.2. Development of AR as a Sensor in Operation and Maintenance
1.3. Development of AR in Operation and Maintenance via Visualization in BIM
1.4. Development of AR in Operation and Maintenance via Visualization in Other Information Models
1.5. Development of AR in Operation and Maintenance via Visualization without Using Any Information Models
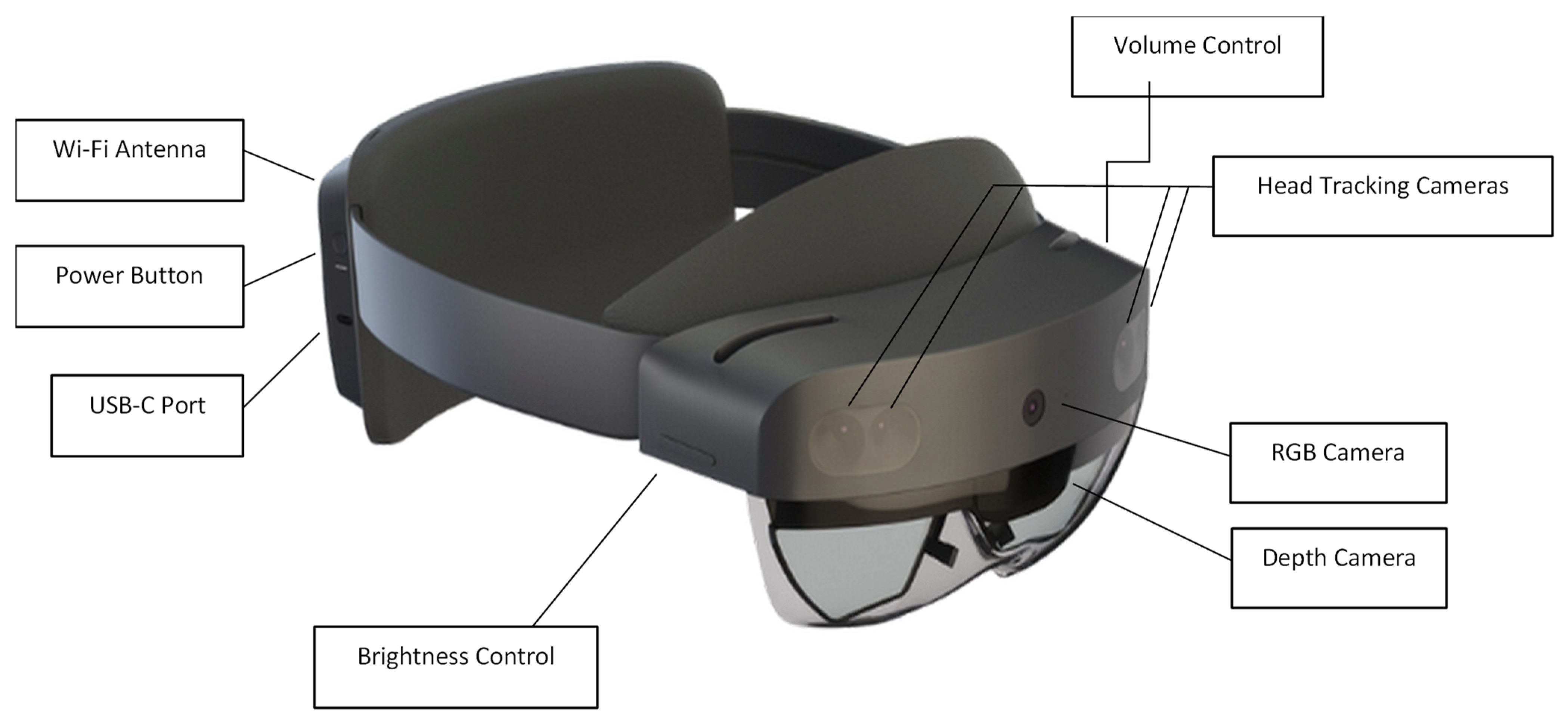
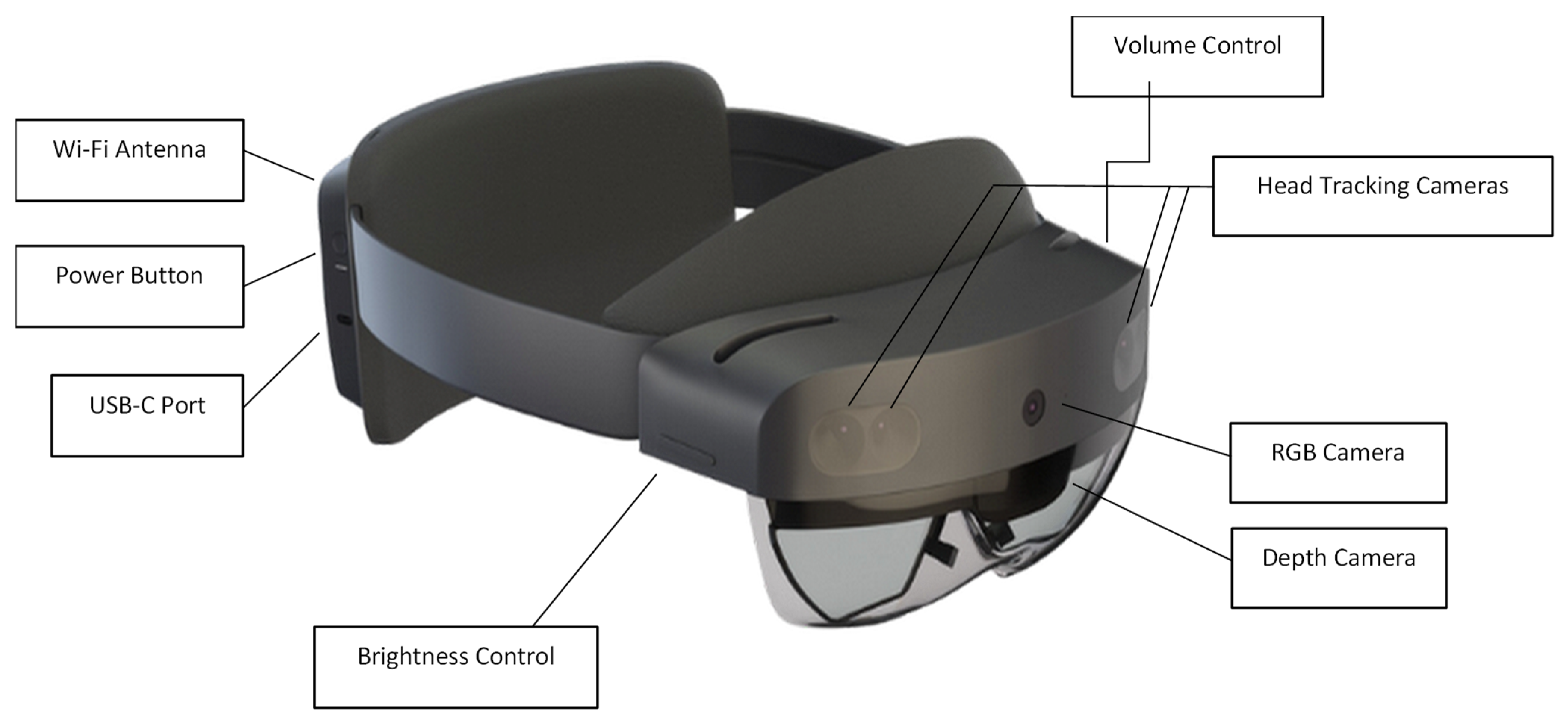
2. Description of the Selected AR Device
3. The Proposed AR-Based SHM Methodology
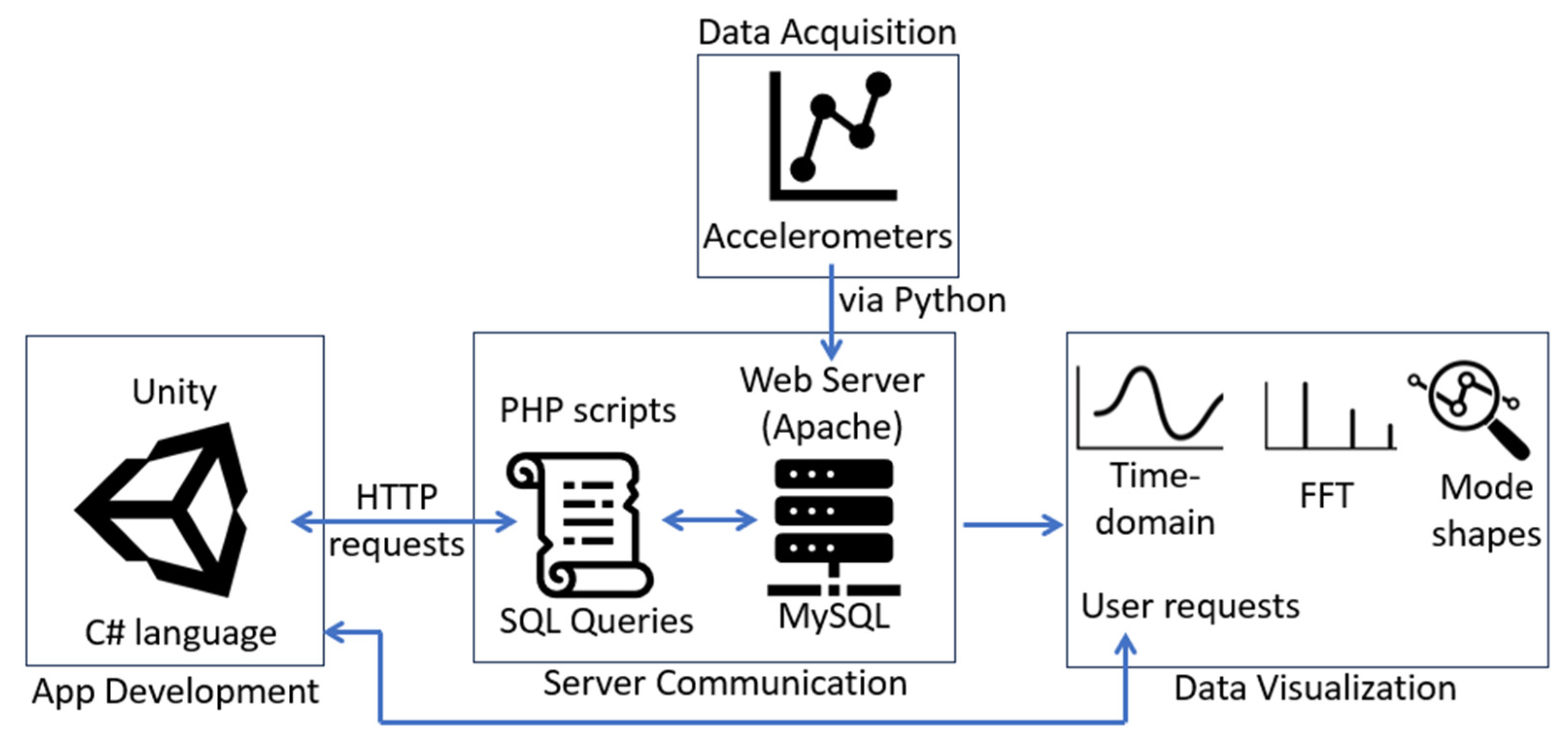
3.1. Application Development
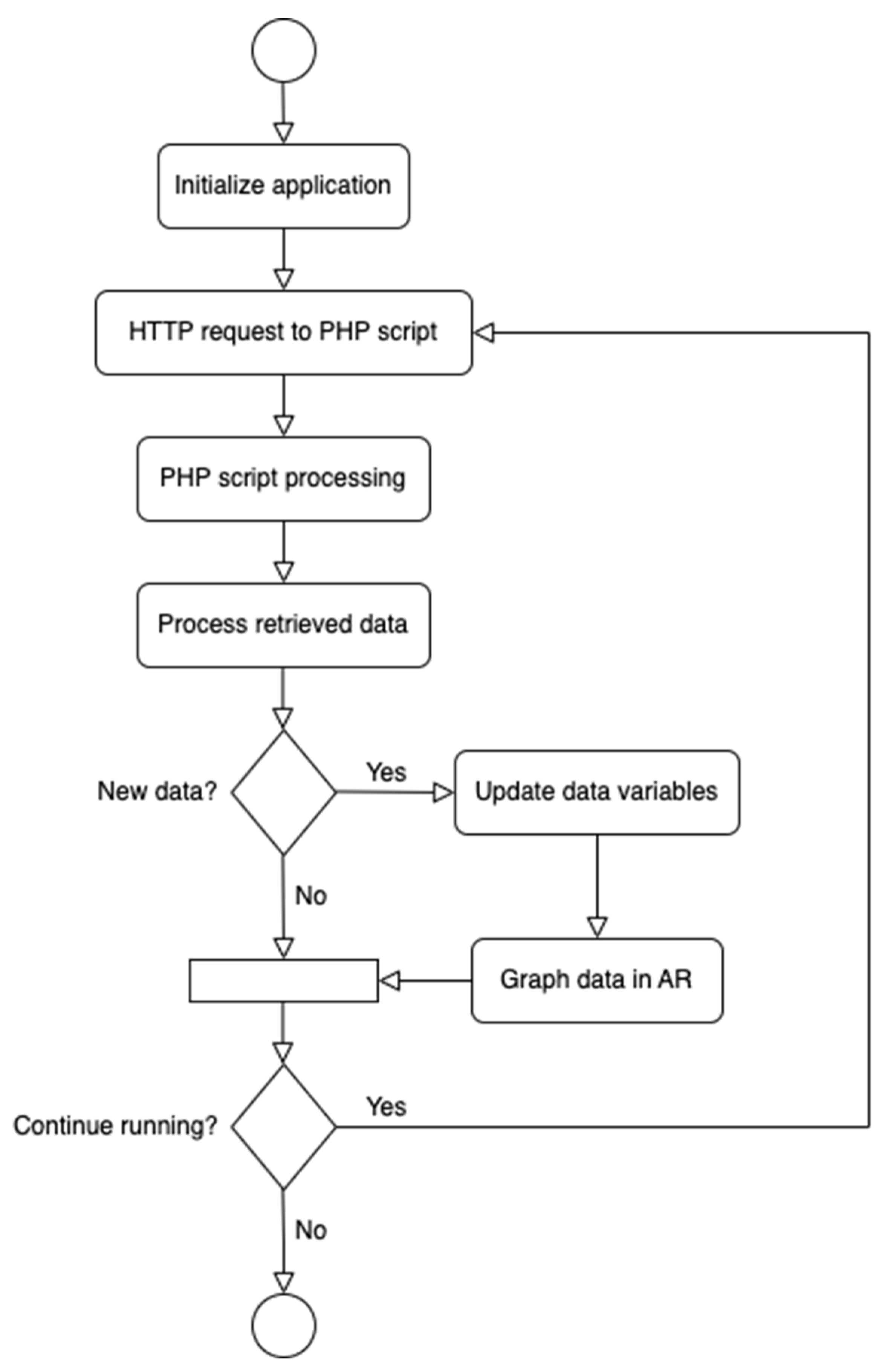
3.2. Server Communication for Remote Data Retrieval
3.3. System Identification within the AR Environment
- Model Equations: The state-space model is given by:
- 2.
- Estimation of Model Matrices A and C:
- The model matrices A and C are estimated from the output covariance matrix.
- 3.
- Eigenvalues and Eigenvectors:
- Calculate the eigenvalue matrix Λd and the eigenvector matrix Ψ of A using eigenvalue decomposition. Λd is a diagonal matrix with the discrete eigenvalues μi.
- Calculate continuous-time eigenvalues λi from μi using the sampling time Δt:λi = ln(μi)/Δt
- Calculate the eigenfrequencies fi from the continuous-time eigenvalues:fi = |λi|/(2π)
- Calculate the damping ratios ζi from the real and absolute parts of the continuous-time eigenvalues:ζi = real(λi)/|λi|
- 4.
- Mode Shapes:
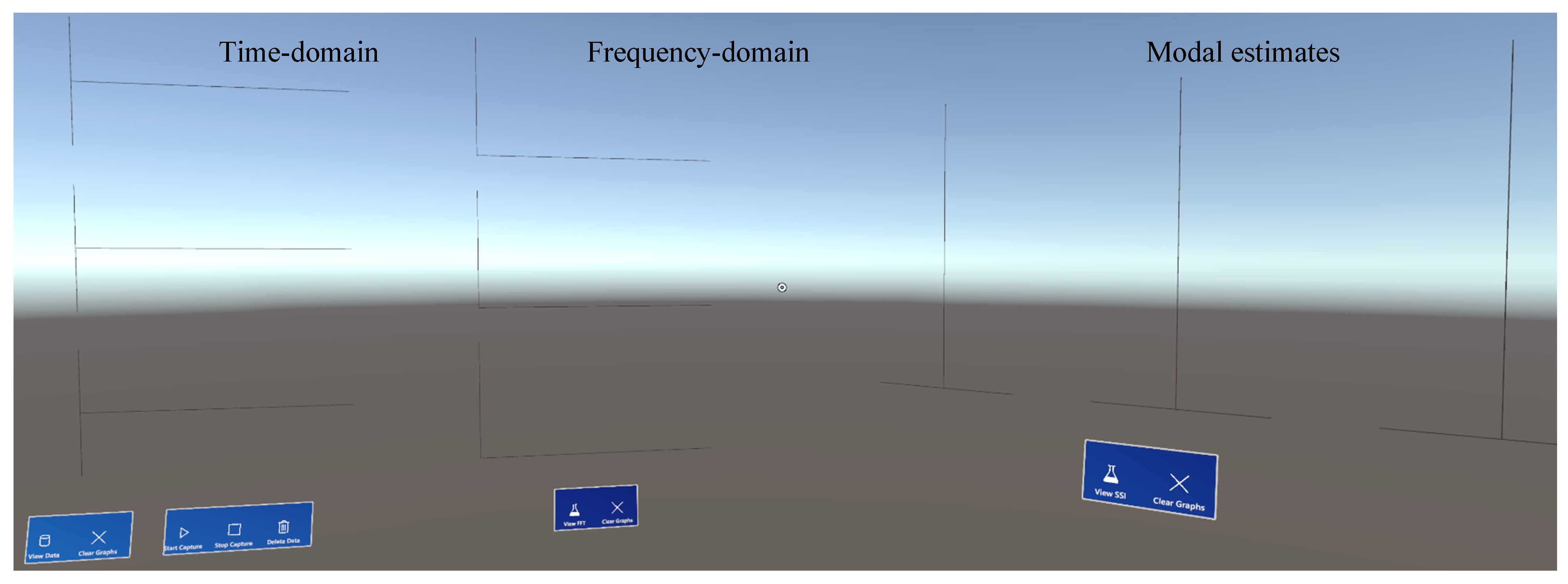
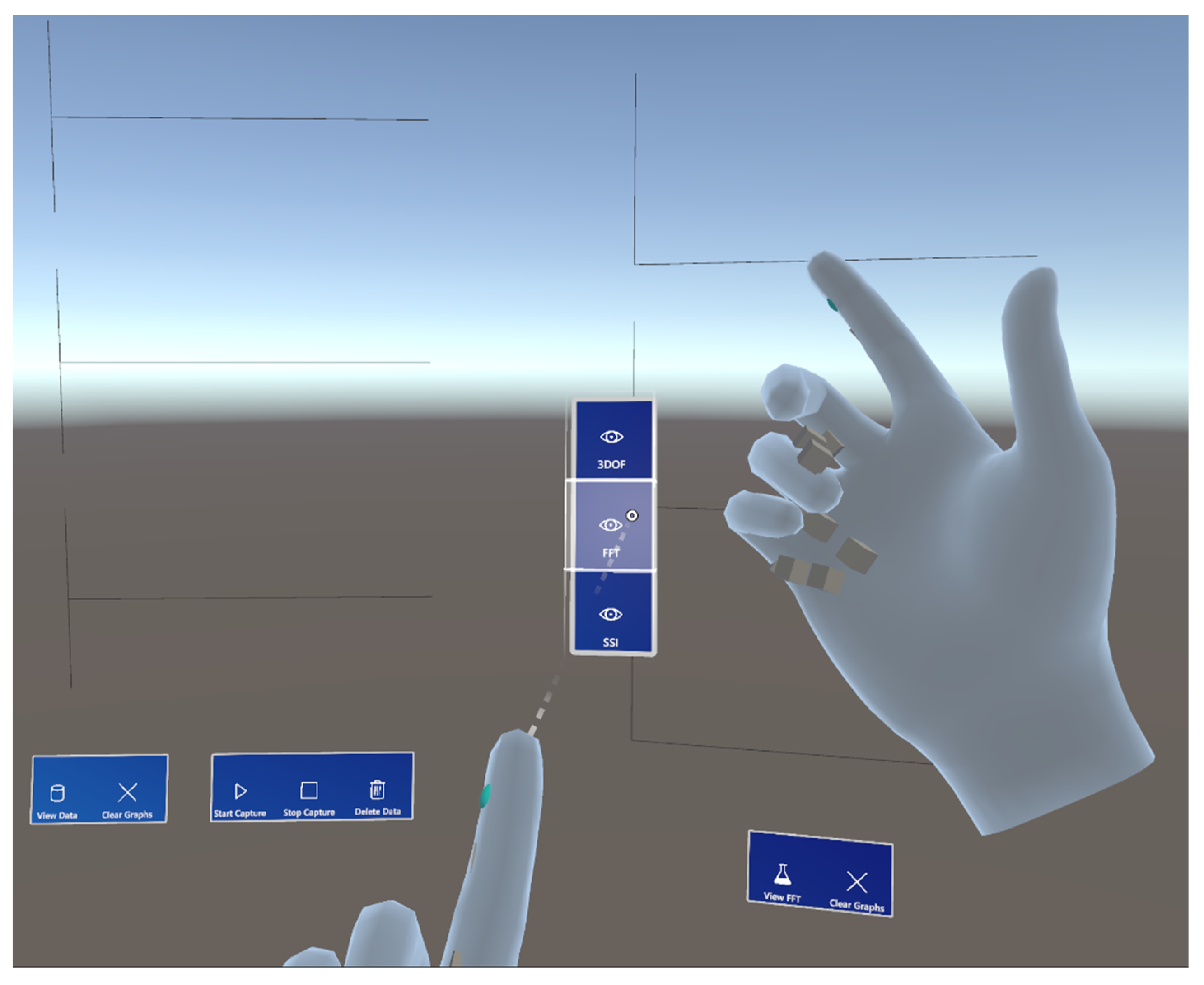
3.4. Data Visualization
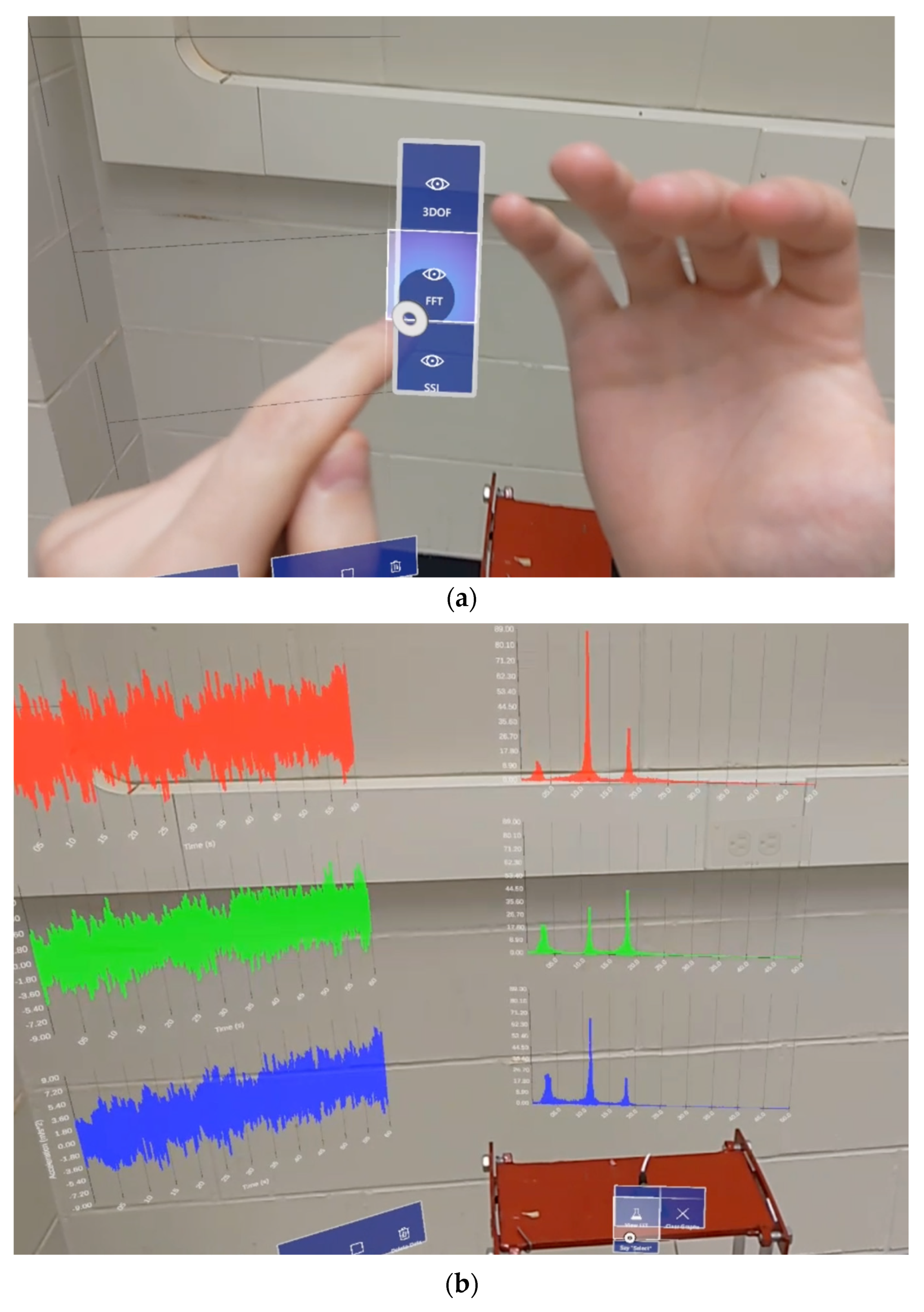
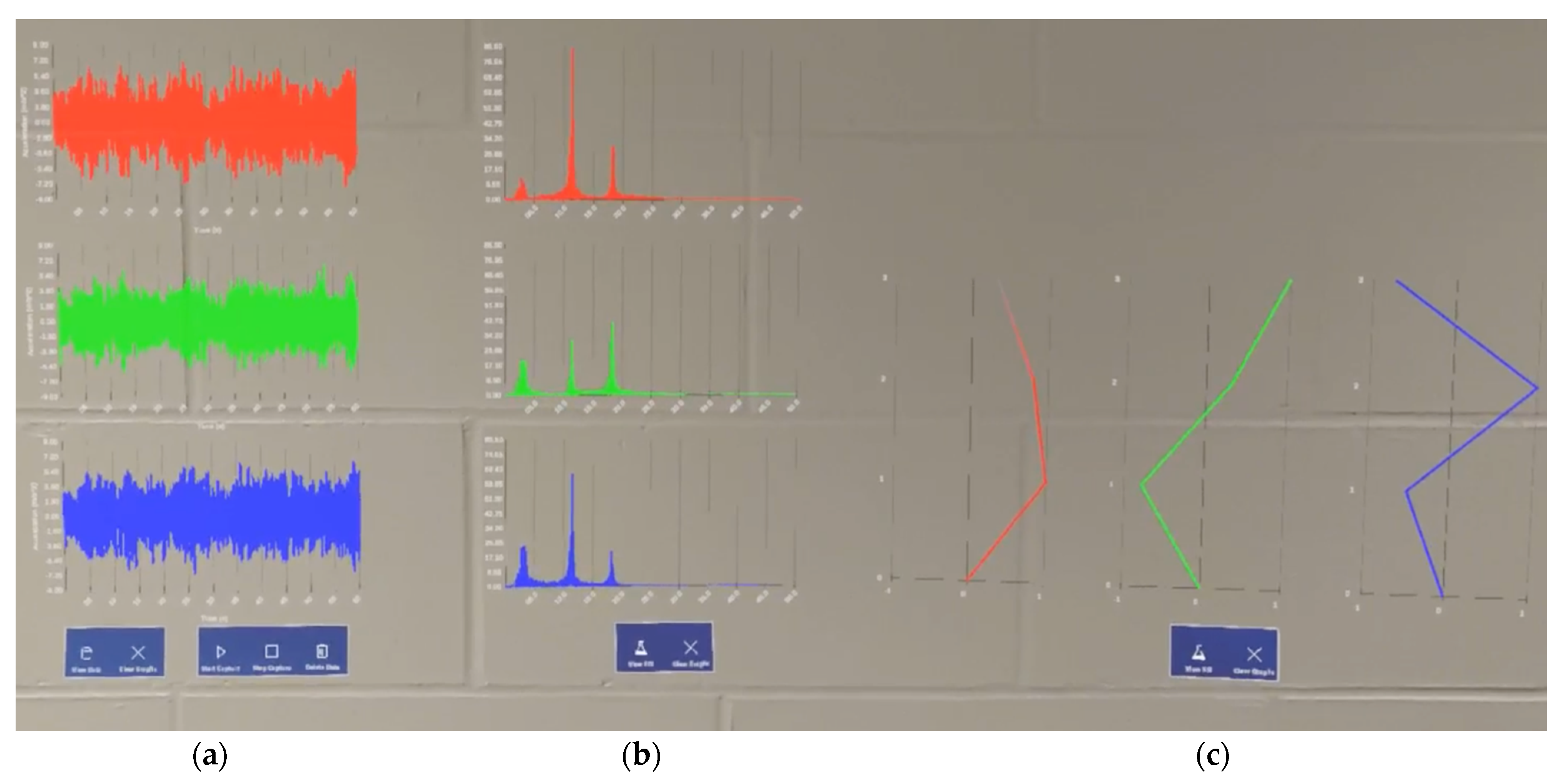
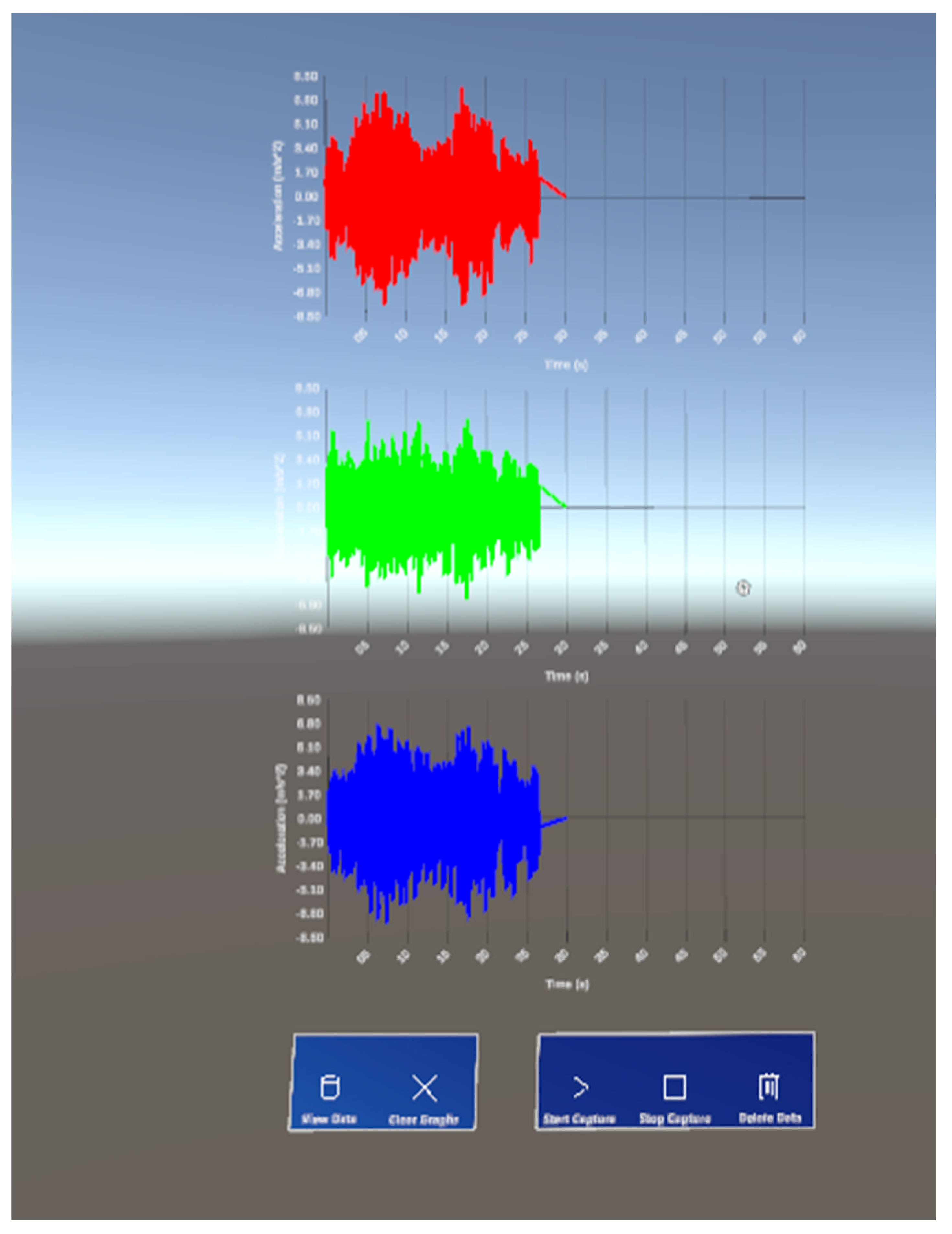
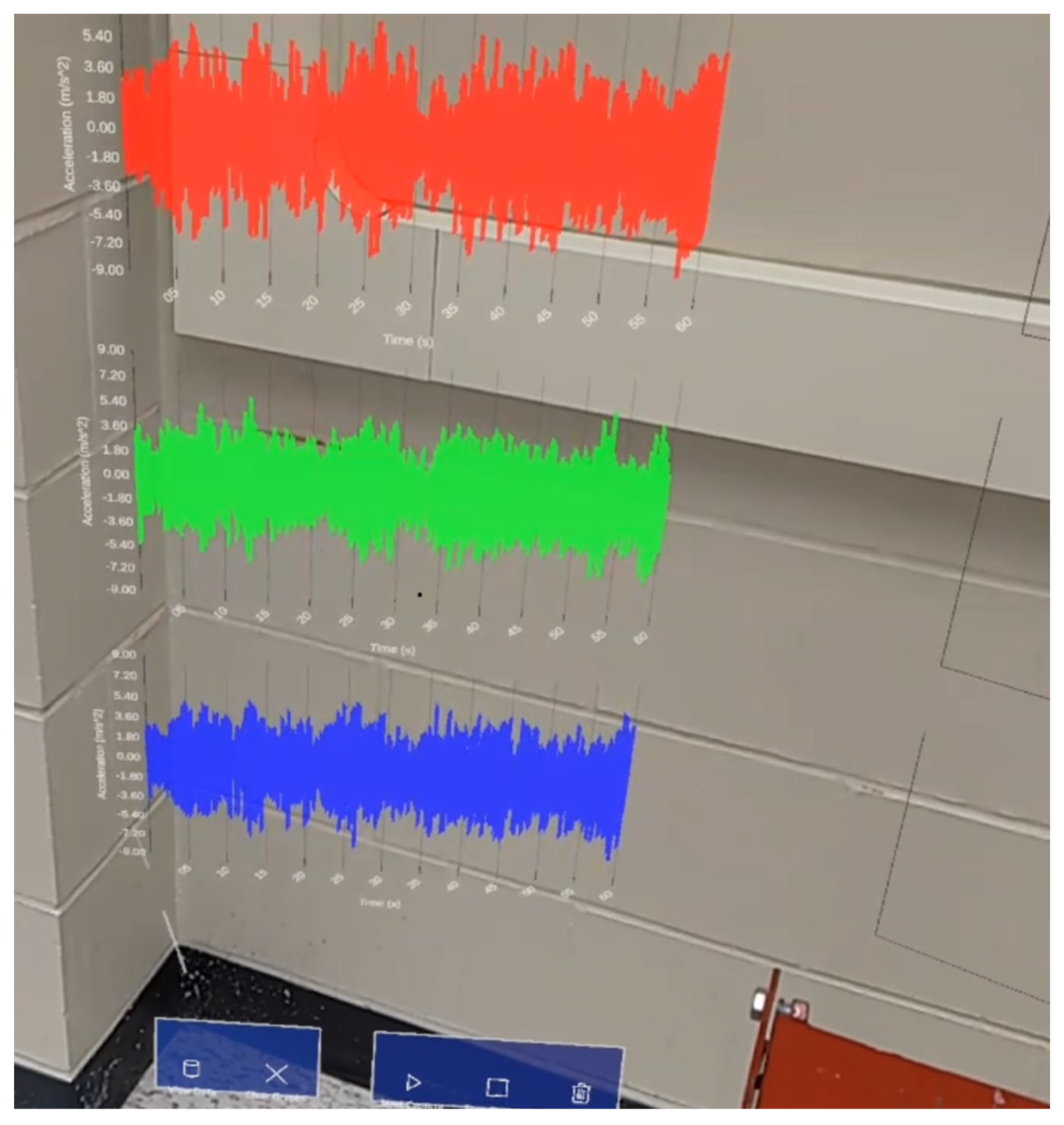
3.4.1. Visualization of Time-Domain Information
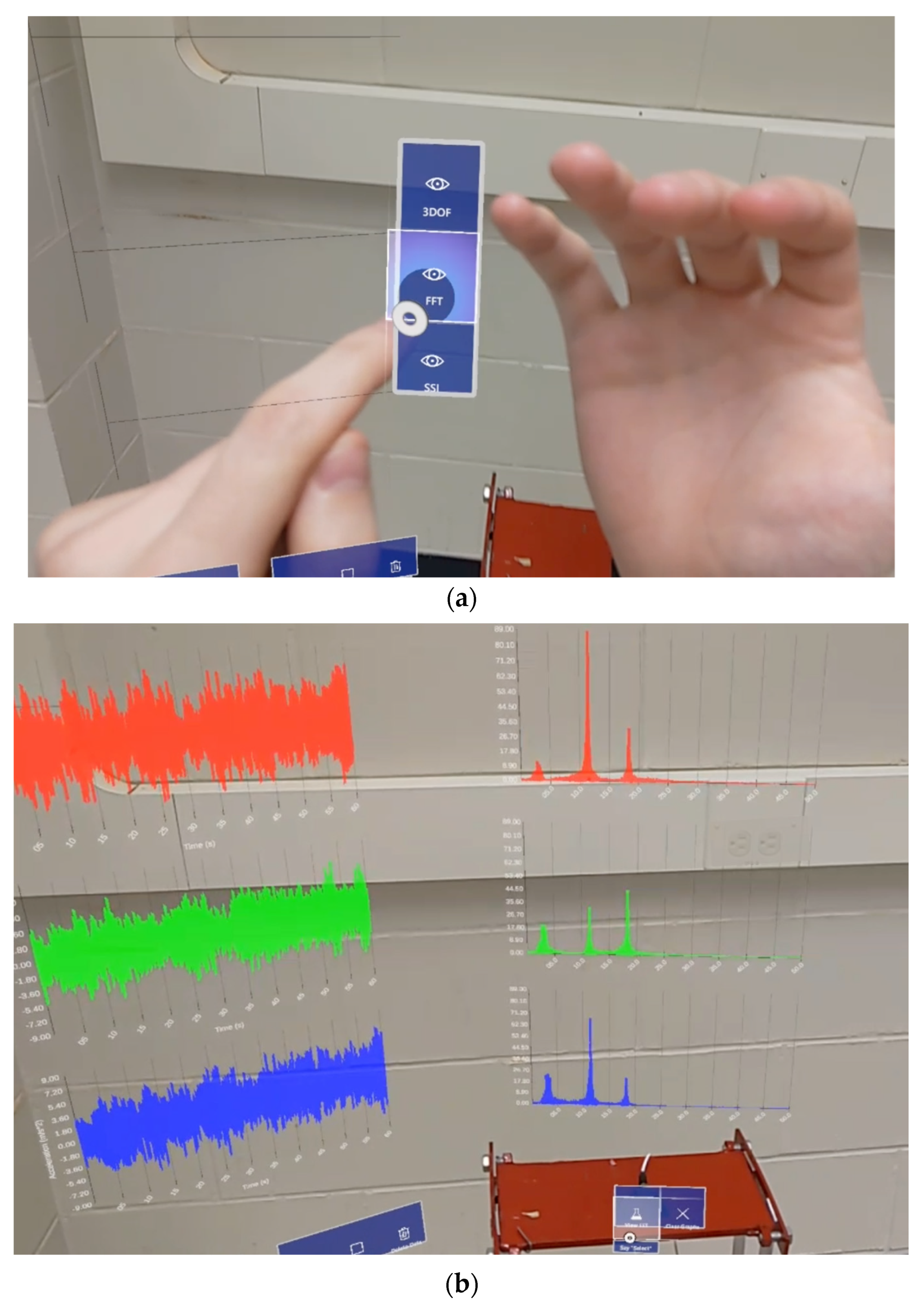
3.4.2. Visualization of Frequency-Domain Information
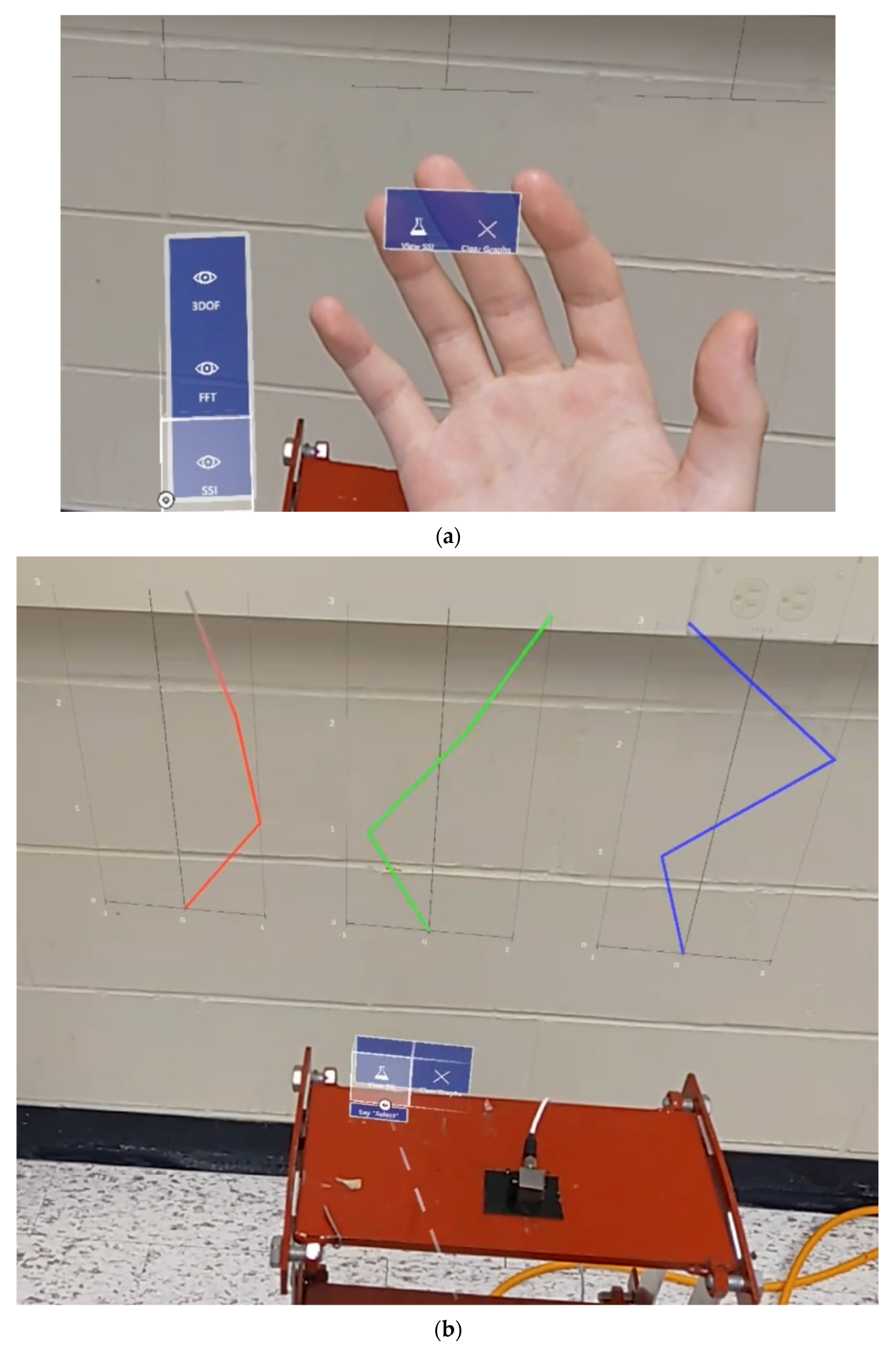
3.4.3. Visualization of System Identification Information
4. Results and Discussion
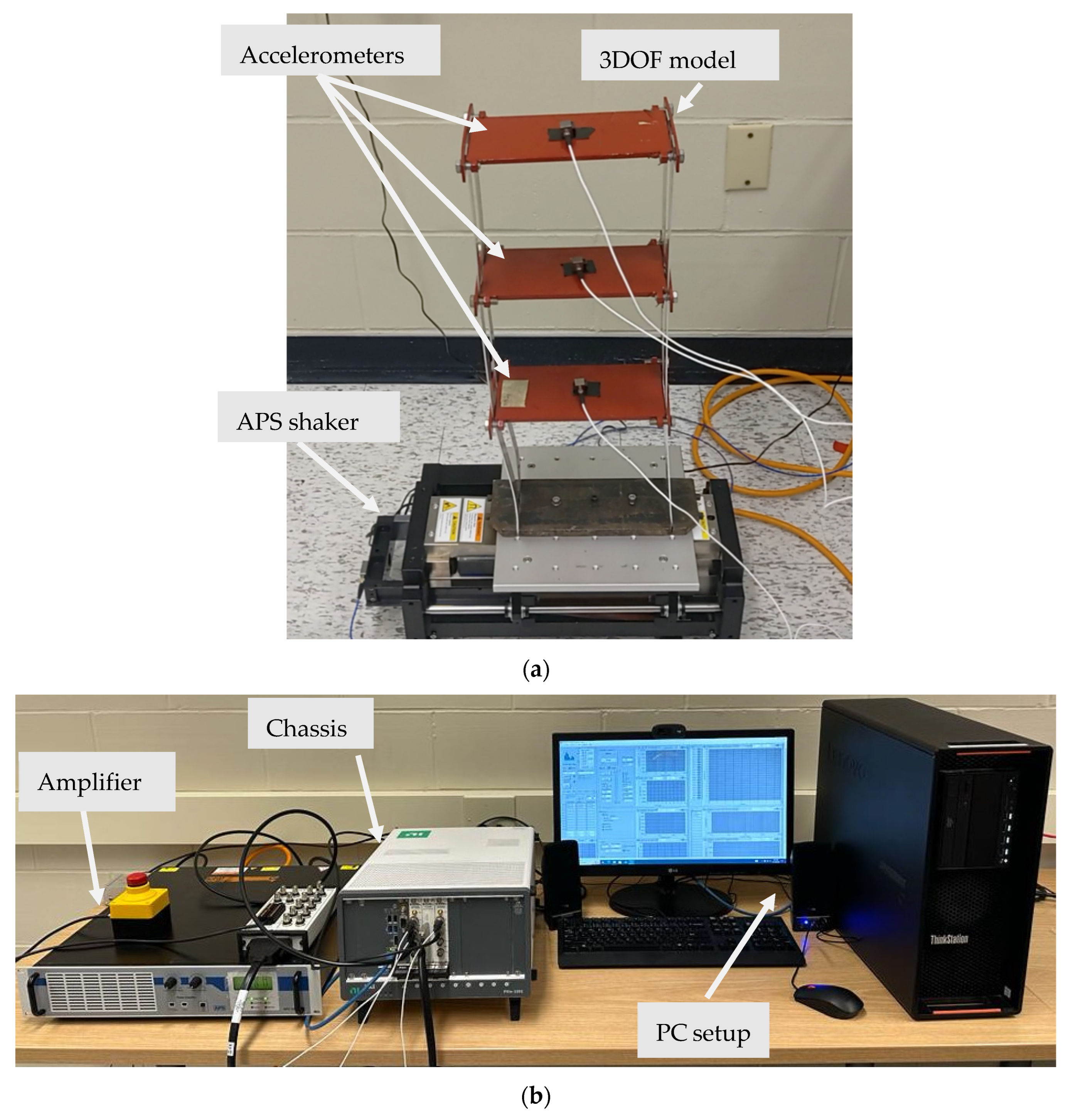
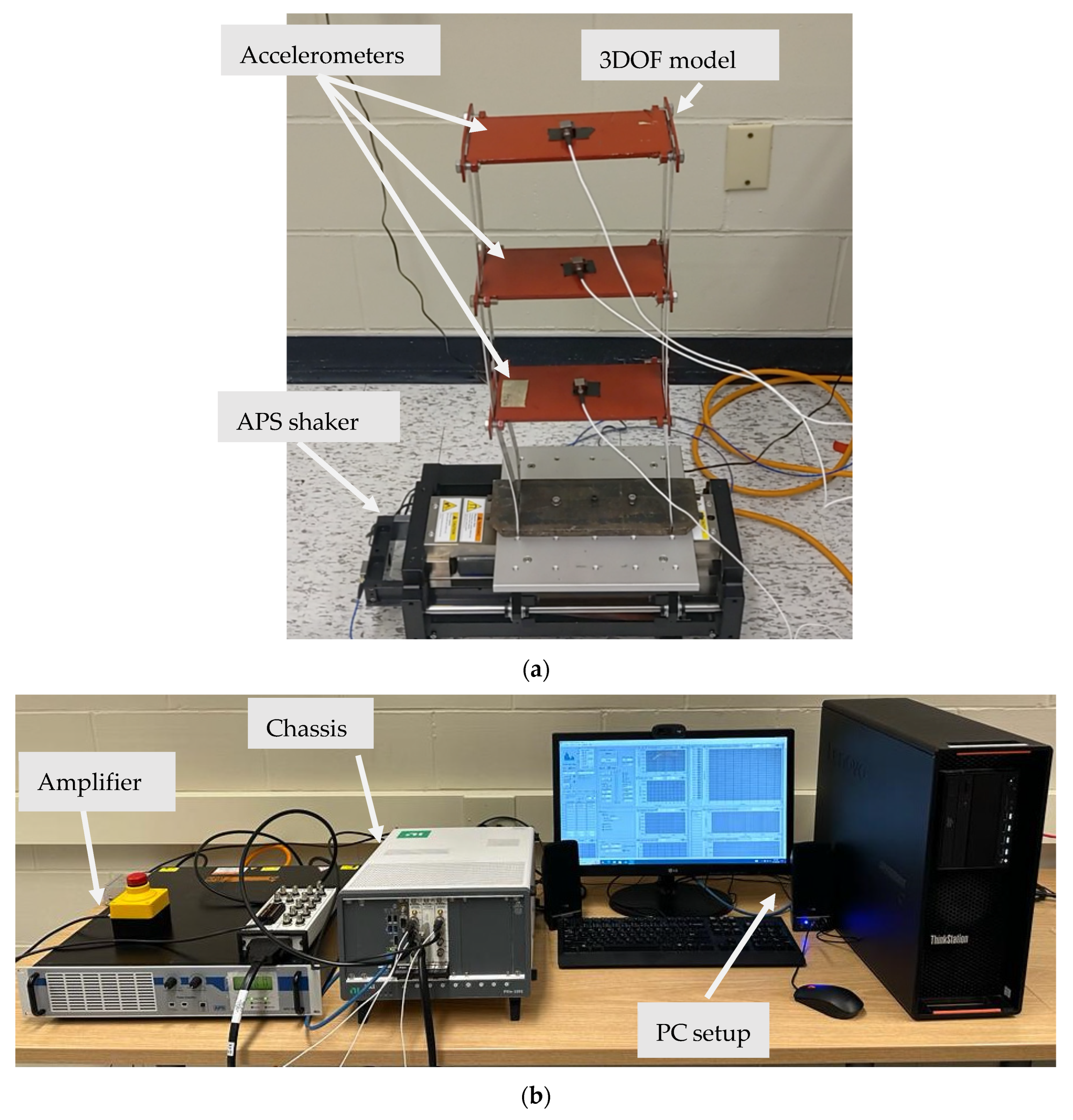
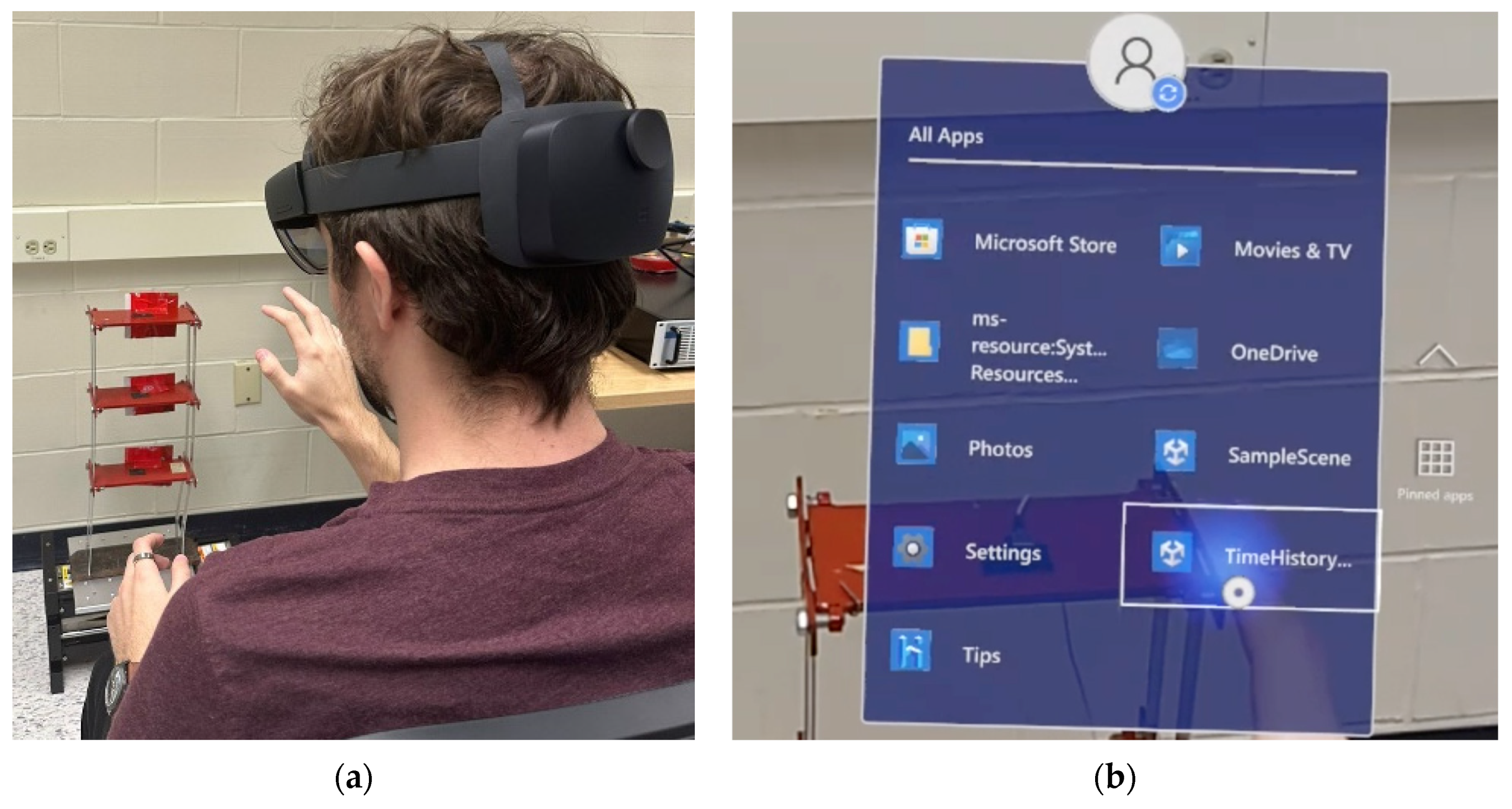
4.1. Experimental Setup
4.2. Application of Proposed AR-Based Visualization
5. Conclusions
- (a)
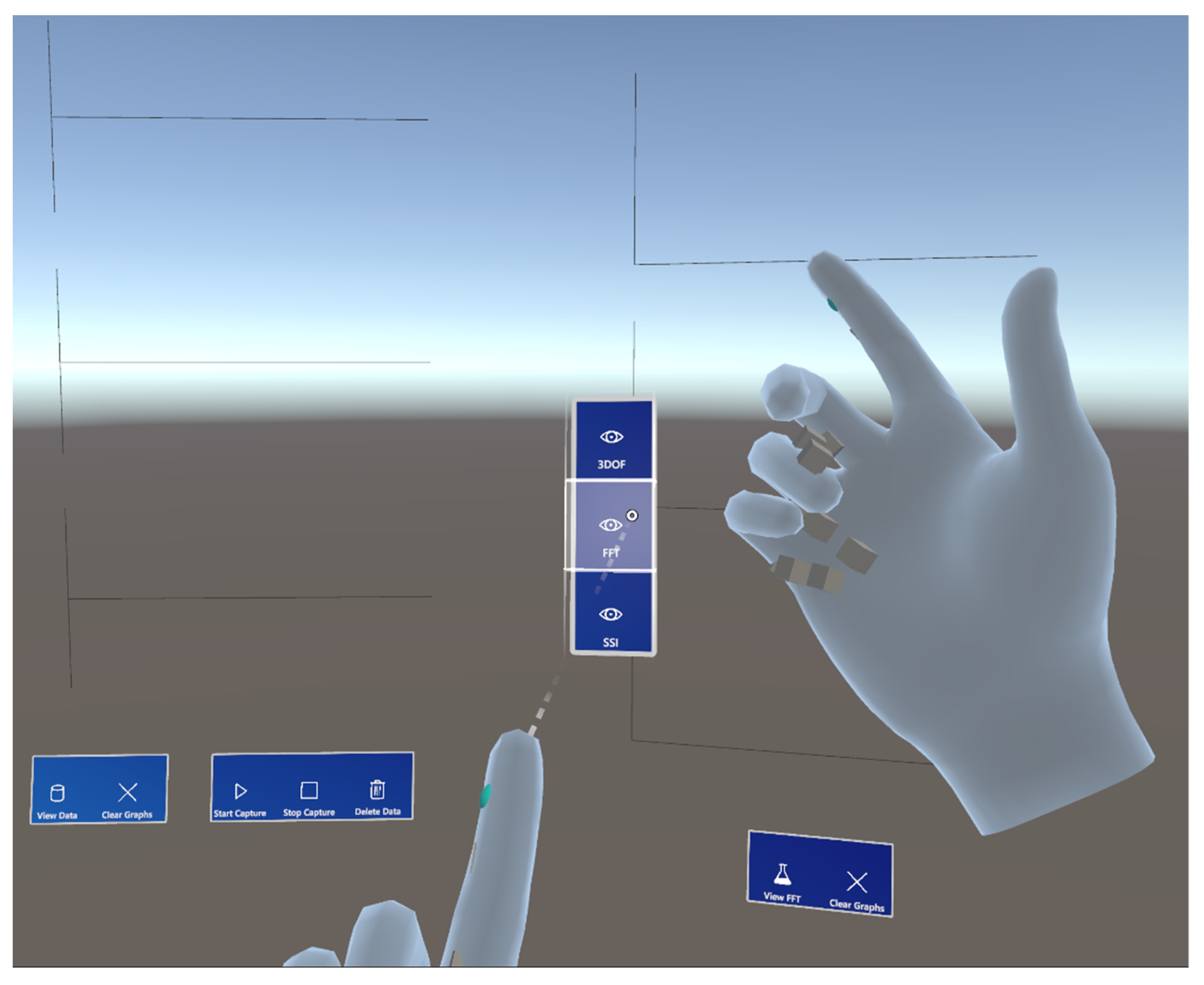
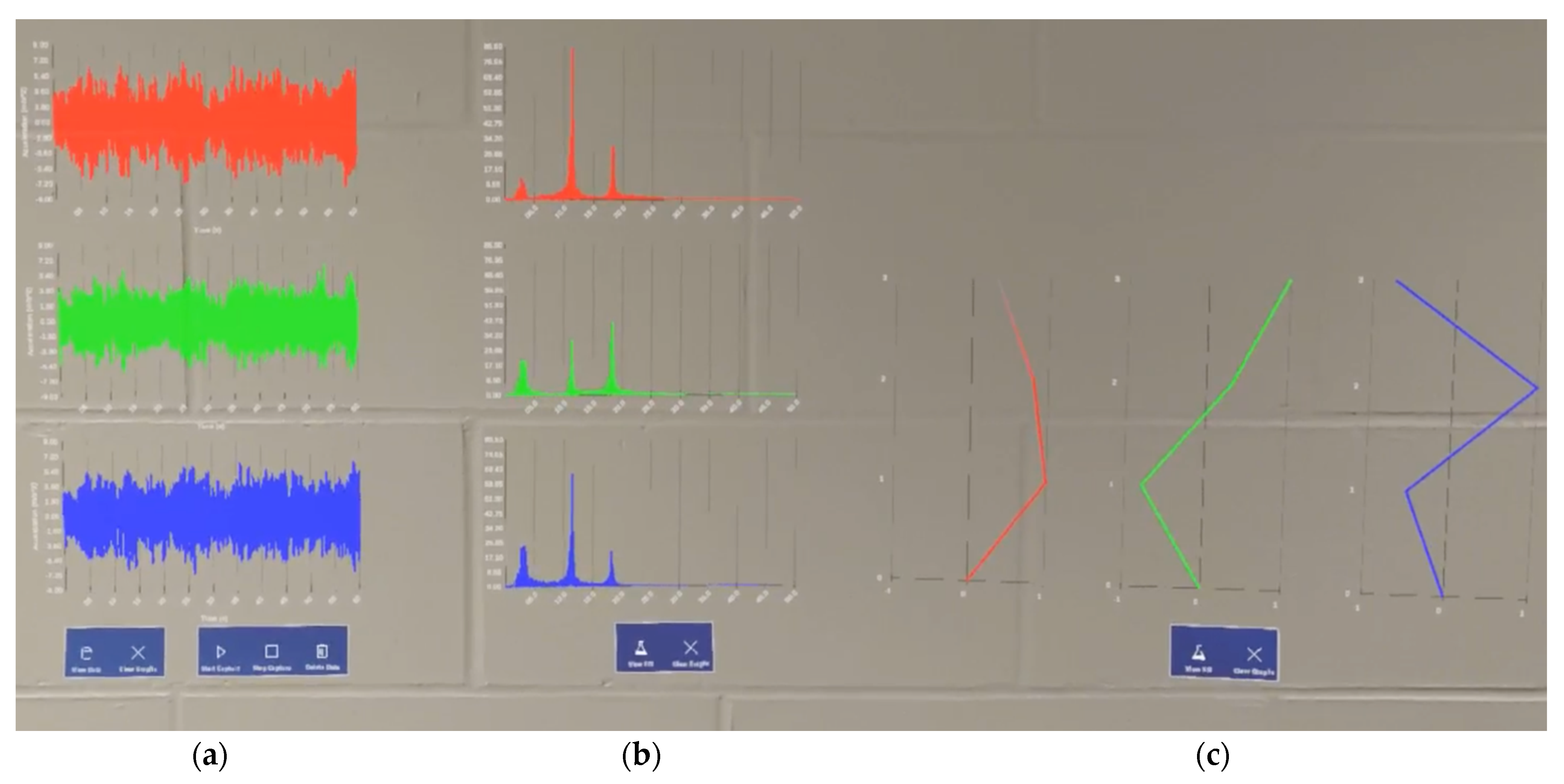
- The program can accurately plot up to 18,000 points of acceleration data across three subplots in real-time without any noticeable performance drops. Within the AR environment, users can perform forward Fourier transforms with the collected experiment data at any point during the experiment. The results of these analyses are instantly stored and displayed on the HL2 device. This capability is pivotal for instantaneous data analysis and visualization in structural health monitoring.
- (b)
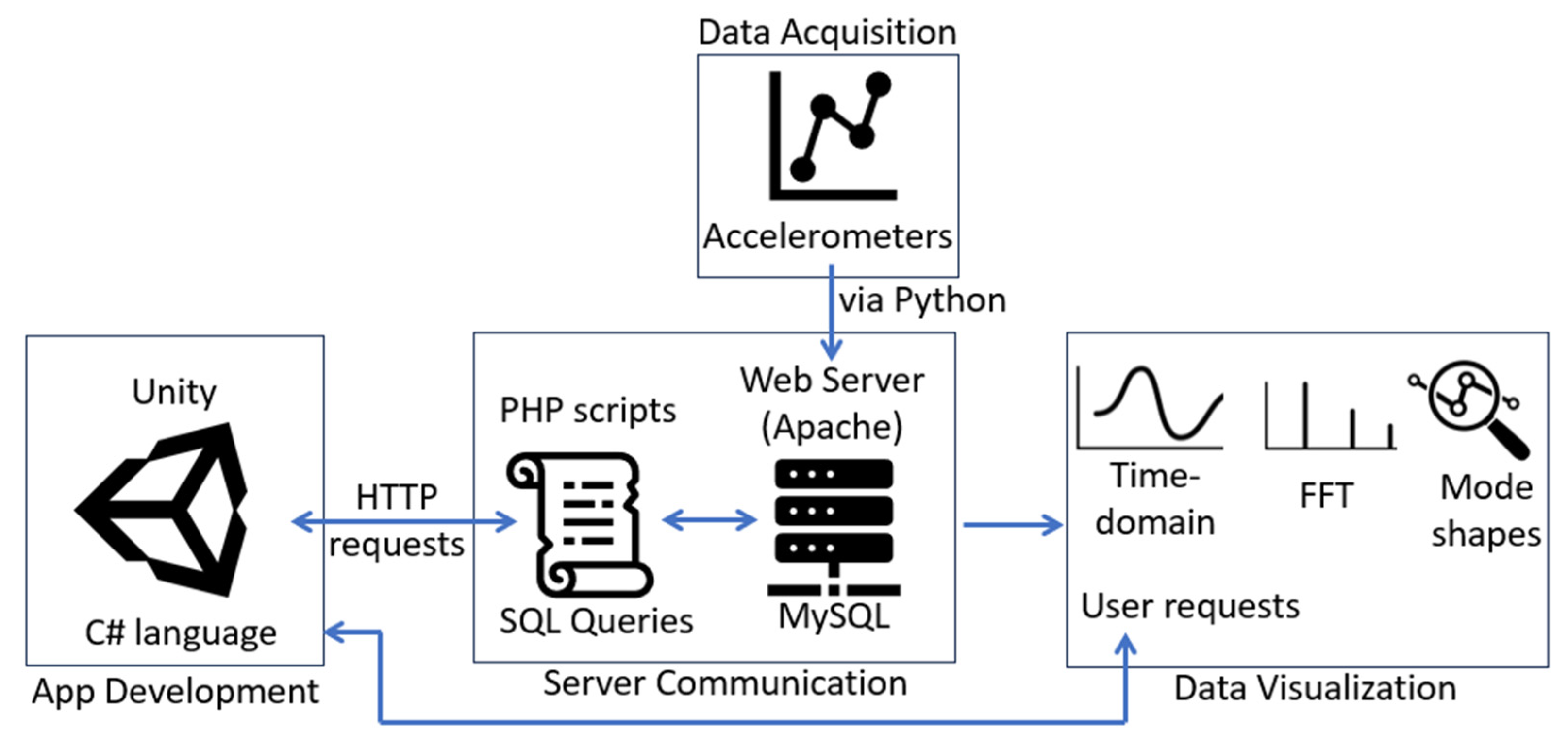
- The application seamlessly communicates with an external Python module via HTTP requests, enabling it to perform SSI COV from recorded acceleration data. The Python module is hosted on a web development server and works in conjunction with PHP scripts to facilitate data transmission with the Unity application. In the future, a similar approach can be employed to establish communications with additional libraries, further expanding the capabilities of integrating AR with SHM.
- (c)
- The system’s versatility extends beyond location constraints, as data transmission occurs seamlessly over Wi-Fi whether in the lab or field. If the server and HL2 are connected to the same network and the server scripts are updated to accommodate any network changes, users can access and use the system virtually anywhere.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ge, L.; Dan, D.; Sadhu, A. A benchmark dataset for vision-based traffic load monitoring in a cable-stayed bridge. J. Bridge Eng. 2024, 29, 04723001. [Google Scholar] [CrossRef]
- Hassani, S.; Dackermann, U. A Systematic Review of Advanced Sensor Technologies for Non-Destructive Testing and Structural Health Monitoring. Sensors 2023, 23, 2204. [Google Scholar] [CrossRef]
- Prakash, G.; Dugalam, R.; Barbosh, M.; Sadhu, A. Recent advancement of concrete dam health monitoring technology: A systematic literature review. Structures 2022, 44, 766–784. [Google Scholar] [CrossRef]
- Ranyal, E.; Sadhu, A.; Jain, K. Enhancing pavement health assessment: An attention-based approach for accurate crack detection, measurement and mapping. Expert Syst. Appl. 2024, 247, 123314. [Google Scholar] [CrossRef]
- Sabato, A.; Dabetwar, S.; Kulkarni, N.N.; Fortino, G. Noncontact Sensing Techniques for AI-Aided Structural Health Monitoring: A Systematic Review. IEEE Sens. J. 2023, 23, 4672–4684. [Google Scholar] [CrossRef]
- Singh, P.; Mittal, S.; Sadhu, A. Recent advancements and future trends in indirect bridge health monitoring. J. Pract. Period. Struct. Des. Constr. 2023, 28, 03122008. [Google Scholar] [CrossRef]
- Sony, S.; LaVenture, S.; Sadhu, A. A literature review of next-generation smart sensing technology in structural health monitoring. Struct. Control Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- Sony, S.; Dunphy, K.; Sadhu, A.; Capretz, M. A systematic review of convolutional neural network-based structural condition assessment techniques. Eng. Struct. 2021, 226, 111347. [Google Scholar] [CrossRef]
- Entezami, A.; Sarmadi, H.; Behkamal, B.; Mariani, S. Big Data Analytics and Structural Health Monitoring: A Statistical Pattern Recognition-Based Approach. Sensors 2020, 20, 2328. [Google Scholar] [CrossRef] [PubMed]
- Boddupalli, C.; Sadhu, A.; Rezazadeh Azar, E.; Pattyson, S. Improved visualization of infrastructure monitoring data using building information modeling. Struct. Infrastruct. Eng. 2019, 15, 1247–1265. [Google Scholar] [CrossRef]
- Sakr, M.; Sadhu, A. Visualization of structural health monitoring information using internet-of-things integrated with building information modeling. J. Infrastruct. Intell. Resil. 2023, 2, 100053. [Google Scholar] [CrossRef]
- Alvarez-Marin, A.; Velazquez-Iturbide, J.A. Augmented Reality and Engineering Education: A Systematic Review. IEEE Trans. Learn. Technol. 2021, 14, 817–831. [Google Scholar] [CrossRef]
- Wyckoff, E.; Reza, R.; Moreu, F. Feedback and Control of Dynamics and Robotics using Augmented Reality. arXiv 2023, arXiv:2303.13016. [Google Scholar] [CrossRef]
- Kinnen, T.; Blut, C.; Effkemann, C.; Blankenbach, J. Thermal reality capturing with the Microsoft HoloLens 2 for energy system analysis. Energy Build. 2023, 288, 113020. [Google Scholar] [CrossRef]
- Sadhu, A.; Peplinski, J.E.; Mohammadkhorasani, A.; Moreu, F. A Review of Data Management and Visualization Techniques for Structural Health Monitoring Using BIM and Virtual or Augmented Reality. J. Struct. Eng. 2022, 149, 03122006. [Google Scholar] [CrossRef]
- Xu, J.; Moreu, F. A Review of Augmented Reality Applications in Civil Infrastructure During the 4th Industrial Revolution. Front. Built Environ. 2021, 7, 640732. [Google Scholar] [CrossRef]
- AL-Dhaimesh, S.H.; Taib, N. A Review: Investigation of Augmented Reality—BIM Benefits in Design Process in AEC Industry. Informatica 2023, 47, 111. [Google Scholar] [CrossRef]
- Meža, S.; Turk, Ž.; Dolenc, M. Component based engineering of a mobile BIM-based augmented reality system. Autom. Constr. 2014, 42, 1–12. [Google Scholar] [CrossRef]
- Williams, G.; Gheisari, M.; Chen, P.-J.; Irizarry, J. BIM2MAR: An Efficient BIM Translation to Mobile Augmented Reality Applications. J. Manag. Eng. 2015, 31, A4014009. [Google Scholar] [CrossRef]
- Barazzetti, L.; Banfi, F.; Brumana, R.; Oreni, D.; Previtali, M.; Roncoroni, F. HBIM and augmented information: Towards a wider user community of image and range-based reconstructions. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2015, 40, 35–42. [Google Scholar] [CrossRef]
- Salamak, M.; Januszka, M. BIM Models and Augmented Reality for Concrete Bridge Inspections. In Proceedings of the 11th Central European Congress on Concrete Engineering, Hainburg, Austria, 1–2 October 2015. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Shibuya, T.; Kanda, M.; Yasojima, A. Crack Inspection Support System for Concrete Structures Using Head Mounted Display in Mixed Reality Space. In Proceedings of the 2019 58th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Hiroshima, Japan, 10–13 September 2019. [Google Scholar]
- Mascareñas, D.D.L.; Ballor, J.A.P.; McClain, O.L.; Mellor, M.A.; Shen, C.Y.; Bleck, B.; Morales, J.; Yeong, L.M.R.; Narushof, B.; Shelton, P.; et al. Augmented reality for next generation infrastructure inspections. Struct. Health Monit. 2021, 20, 1957–1979. [Google Scholar] [CrossRef]
- Awadallah, O.; Sadhu, A. Automated multiclass structural damage detection and quantification using augmented reality. J. Infrastruct. Intell. Resil. 2023, 2, 100024. [Google Scholar] [CrossRef]
- Palma, V.; Iovane, G.; Hwang, S.; Mazzolani, F.M.; Landolfo, R.; Sohn, H.; Faggiano, B. Innovative technologies for structural health monitoring of SFTs: Proposal of combination of infrared thermography with mixed reality. J. Civ. Struct. Health Monit. 2023, 13, 1653–1681. [Google Scholar] [CrossRef]
- Mohammadkhorasani, A.; Malek, K.; Mojidra, R.; Li, J.; Bennett, C.; Collins, W.; Moreu, F. Augmented reality-computer vision combination for automatic fatigue crack detection and localization. Comput. Ind. 2023, 149, 103936. [Google Scholar] [CrossRef]
- Natephra, W.; Motamedi, A. Live data visualization of IoT sensors using augmented reality (AR) and BIM. In Proceedings of the 36th International Symposium on Automation and Robotics in Construction, ISARC 2019, Banff, AB, Canada, 21–24 May 2019; pp. 632–638. [Google Scholar] [CrossRef]
- Chai, C.; Mustafa, K.; Kuppusamy, S.; Yusof, A.; Lim, C.S.; Wai, S.H. Bim integration in augmented reality model. Int. J. Technol. 2019, 10, 1266–1275. [Google Scholar] [CrossRef]
- Liu, D.; Xia, X.; Chen, J.; Li, S. Integrating Building Information Model and Augmented Reality for Drone-Based Building Inspection. J. Comput. Civ. Eng. 2021, 35, 04020073. [Google Scholar] [CrossRef]
- Fawad, M.; Salamak, M.; Hanif, M.U.; Koris, K.; Ahsan, M.; Rahman, H.; Gerges, M.; Salah, M.M. Integration of Bridge Health Monitoring System With Augmented Reality Application Developed Using 3D Game Engine–Case Study. IEEE Access 2024, 12, 16963–16974. [Google Scholar] [CrossRef]
- Sharma, A.; Kosasih, E.; Zhang, J.; Brintrup, A.; Calinescu, A. Digital Twins: State of the art theory and practice, challenges, and open research questions. J. Ind. Inf. Integr. 2022, 30, 100383. [Google Scholar] [CrossRef]
- Schroeder, G.; Steinmetz, C.; Pereira, C.E.; Muller, I.; Garcia, N.; Espindola, D.; Rodrigues, R. Visualising the digital twin using web services and augmented reality. In Proceedings of the 2016 IEEE International Conference on Industrial Informatics (INDIN), Poitiers, France, 19–21 July 2016; pp. 522–527. [Google Scholar] [CrossRef]
- Revetria, R.; Tonelli, F.; Damiani, L.; Demartini, M.; Bisio, F.; Peruzzo, N. A Real-Time Mechanical Structures Monitoring System Based On Digital Twin, Iot and Augmented Reality; A Real-Time Mechanical Structures Monitoring System Based On Digital Twin, Iot and Augmented Reality. In Proceedings of the 2019 Spring Simulation Conference (SpringSim), Tucson, AZ, USA, 29 April–2 May 2019. [Google Scholar]
- Nguyen, D.-C.; Kang, M.; Jang, D.; Shim, C. Developing Mixed Reality-Based Digital Twin Model for Bridge Maintenance System. In Proceedings of the 22nd International Conference on Construction Applications of Virtual Reality (CONVR 2022), Seoul, Republic of Korea, 16–19 November 2022. [Google Scholar]
- Napolitano, R.; Blyth, A.; Glisic, B. Virtual environments for visualizing structural health monitoring sensor networks, data, and metadata. Sensors 2018, 18, 243. [Google Scholar] [CrossRef]
- Napolitano, R.; Liu, Z.; Sun, C.; Glisic, B. Combination of image-based documentation and augmented reality for structural health monitoring and building pathology. Front. Built Environ. 2019, 5, 50. [Google Scholar] [CrossRef]
- Aguero, M.; Maharjan, D.; del Pilar Rodriguez, M.; Mascarenas, D.D.L.; Moreu, F. Design and implementation of a connection between augmented reality and sensors. Robotics 2020, 9, 3. [Google Scholar] [CrossRef]
- Aguero, M.; Doyle, D.; Mascarenas, D.; Moreu, F. Visualization of real-time displacement time history superimposed with dynamic experiments using wireless smart sensors and augmented reality. Earthq. Eng. Eng. Vib. 2023, 22, 573–588. [Google Scholar] [CrossRef]
- Giglioni, V.; Poole, J.; Venanzi, I.; Ubertini, F.; Worden, K. A domain adaptation approach to damage classification with an application to bridge monitoring. Mech. Syst. Signal Process. 2024, 209, 111135. [Google Scholar] [CrossRef]
- Architecture Overview—MRTK 2 | Microsoft Learn. Available online: https://learn.microsoft.com/en-us/windows/mixed-reality/mrtk-unity/mrtk2/architecture/overview?view=mrtkunity-2022-05 (accessed on 14 November 2023).
- knutankv/koma: Mode Visualization and Animation (Slightly Experimental) added. Available online: https://zenodo.org/records/10677831 (accessed on 19 February 2024).
- Pasca, D.P.; Aloisio, A.; Rosso, M.M.; Sotiropoulos, S. PyOMA and PyOMA_GUI: A Python module and software for Operational Modal Analysis. SoftwareX 2022, 20, 101216. [Google Scholar] [CrossRef]
- Carini, M.R.; Rocha, M.M. CESSIPy: A Python open-source module for stochastic system identification in civil engineering. SoftwareX 2022, 18, 101091. [Google Scholar] [CrossRef]
- Marrongelli, G.; Magalhães, F.; Cunha, Á. ScienceDirect ScienceDirect Automated Operational Modal Analysis of an arch bridge considering the influence of the parametric methods inputs. Procedia Eng. 2017, 199, 2172–2177. [Google Scholar] [CrossRef]
- Rosso, M.M.; Aloisio, A.; Parol, J.; Marano, G.C.; Quaranta, G. Intelligent automatic operational modal analysis. Mech. Syst. Signal Process. 2023, 201, 110669. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Script | Function |
|---|---|
| showexperiment.php | Retrieves existing data from the MySQL database, if any, and echoes the result. |
| ssiexperiment.php | Sends existing data from the MySQL database to CESSIPy and echoes the output mode shape columns. |
| deleteexperiment.php | Deletes any existing data in the MySQL database so a new experiment can be performed. |
| Button | Function |
|---|---|
 Get Data | Requests data from the MySQL database and plots it as a rendered line after storing it locally. |
 Clear Graphs | Clears the graph display. |
 Start Capture | Starts an indefinite looping process where, approximately every 5 s, new data is requested from the MySQL database, and the graphs are automatically redrawn and scaled as necessary. |
 Stop Capture | Stops the live capture process. |
 Delete Data | Deletes all data from the MySQL database so a new experiment can be performed. |
| Button | Function |
|---|---|
 View FFT | Performs an FFT on the acceleration data plotted in the time-domain visualization window and plots the results. |
 Clear Graphs | Clears the graph display. |
| Button | Function |
|---|---|
 View SSI | Calls “ssiexperiment.php” to send experiment data to CESSIPy, returns and plots the resulting estimations. |
 Clear Graphs | Clears the graph display. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carter, E.; Sakr, M.; Sadhu, A. Augmented Reality-Based Real-Time Visualization for Structural Modal Identification. Sensors 2024, 24, 1609. https://doi.org/10.3390/s24051609
Carter E, Sakr M, Sadhu A. Augmented Reality-Based Real-Time Visualization for Structural Modal Identification. Sensors. 2024; 24(5):1609. https://doi.org/10.3390/s24051609
Chicago/Turabian StyleCarter, Elliott, Micheal Sakr, and Ayan Sadhu. 2024. "Augmented Reality-Based Real-Time Visualization for Structural Modal Identification" Sensors 24, no. 5: 1609. https://doi.org/10.3390/s24051609
APA StyleCarter, E., Sakr, M., & Sadhu, A. (2024). Augmented Reality-Based Real-Time Visualization for Structural Modal Identification. Sensors, 24(5), 1609. https://doi.org/10.3390/s24051609