
Analysis and Compensation of Phase Current Measuring Error Caused by Sensing Resistor in PMSM Application


Abstract
1. Introduction
- We reveal the effect of parasitic capacitance and inductance of the sampling resistor on the electromagnetic torque characteristics of PMSM.
- We propose an online observation and compensation method of current sampling error based on the PI-type observer, which effectively suppresses the torque pulsation of PMSM.
- The parameters of the PMSM are achieved from the laboratory.
2. Current Measurement Error Model
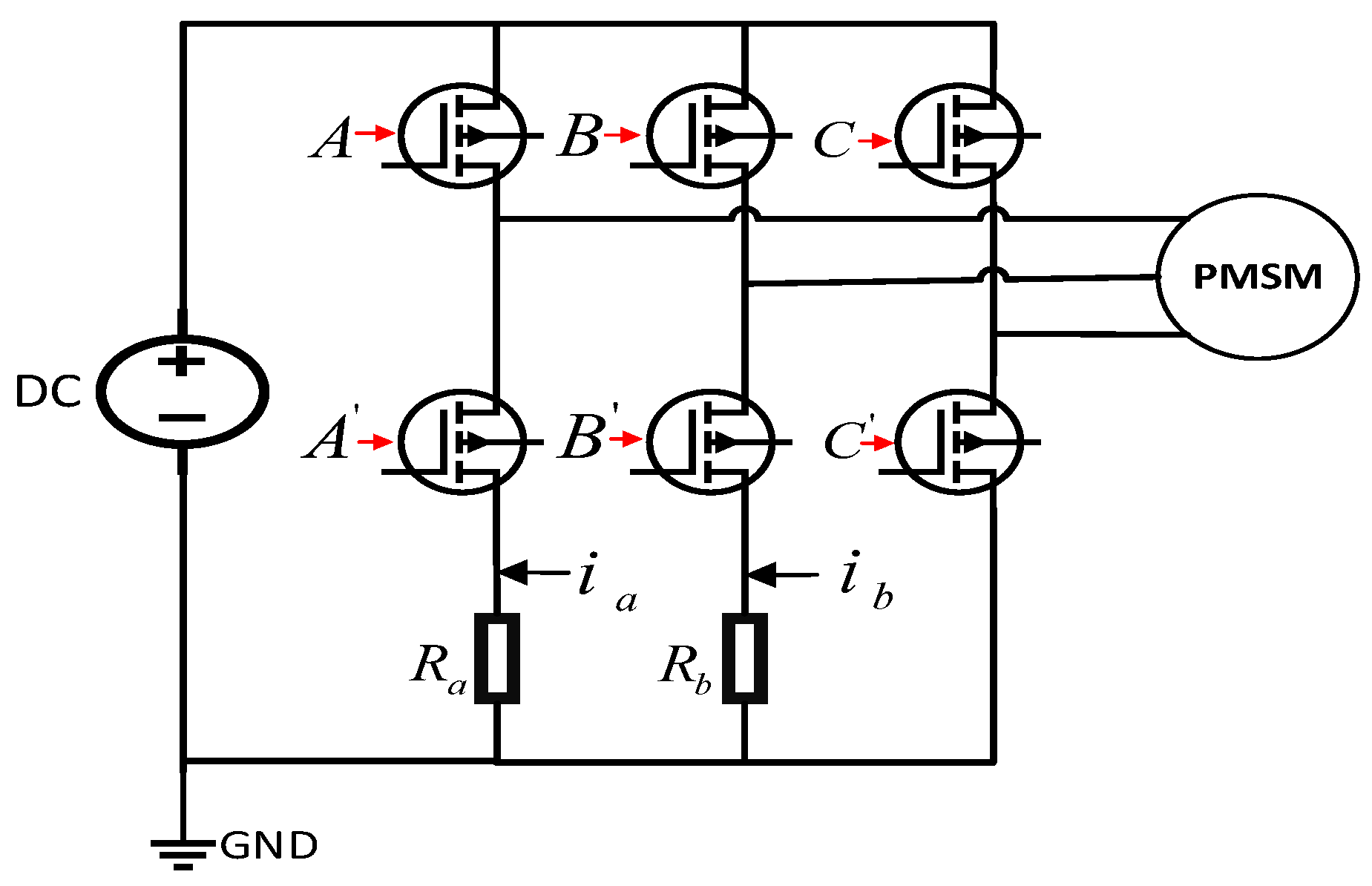
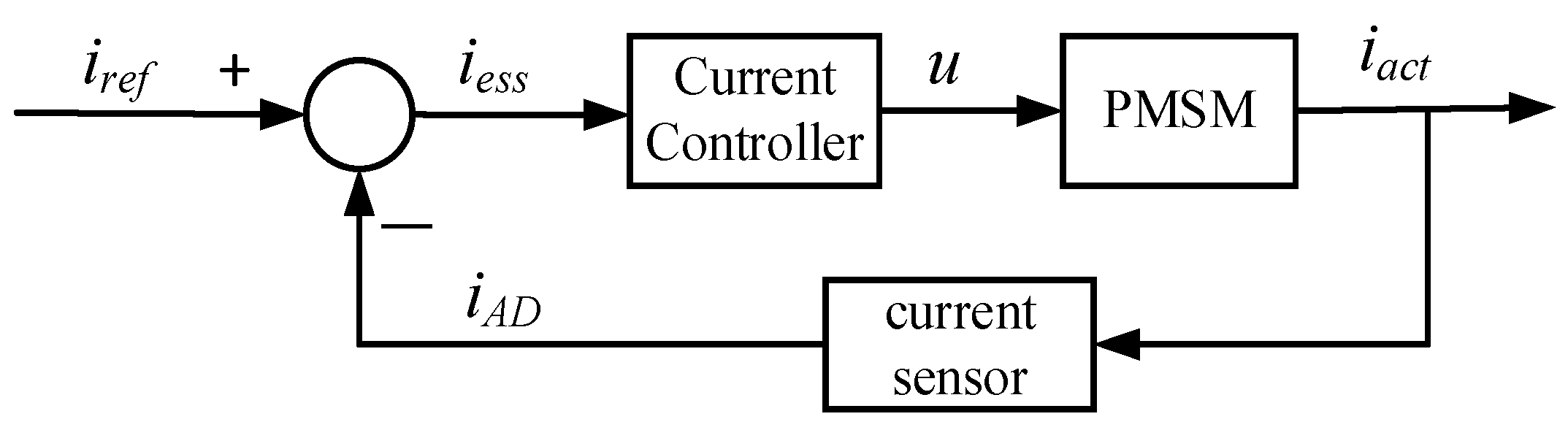
2.1. Current Sensors in PMSM
2.2. Sources of Current Sampling Errors
2.3. Effects of Current Sampling Error
3. Online Observation and Compensation Methods for Current Measurement Errors
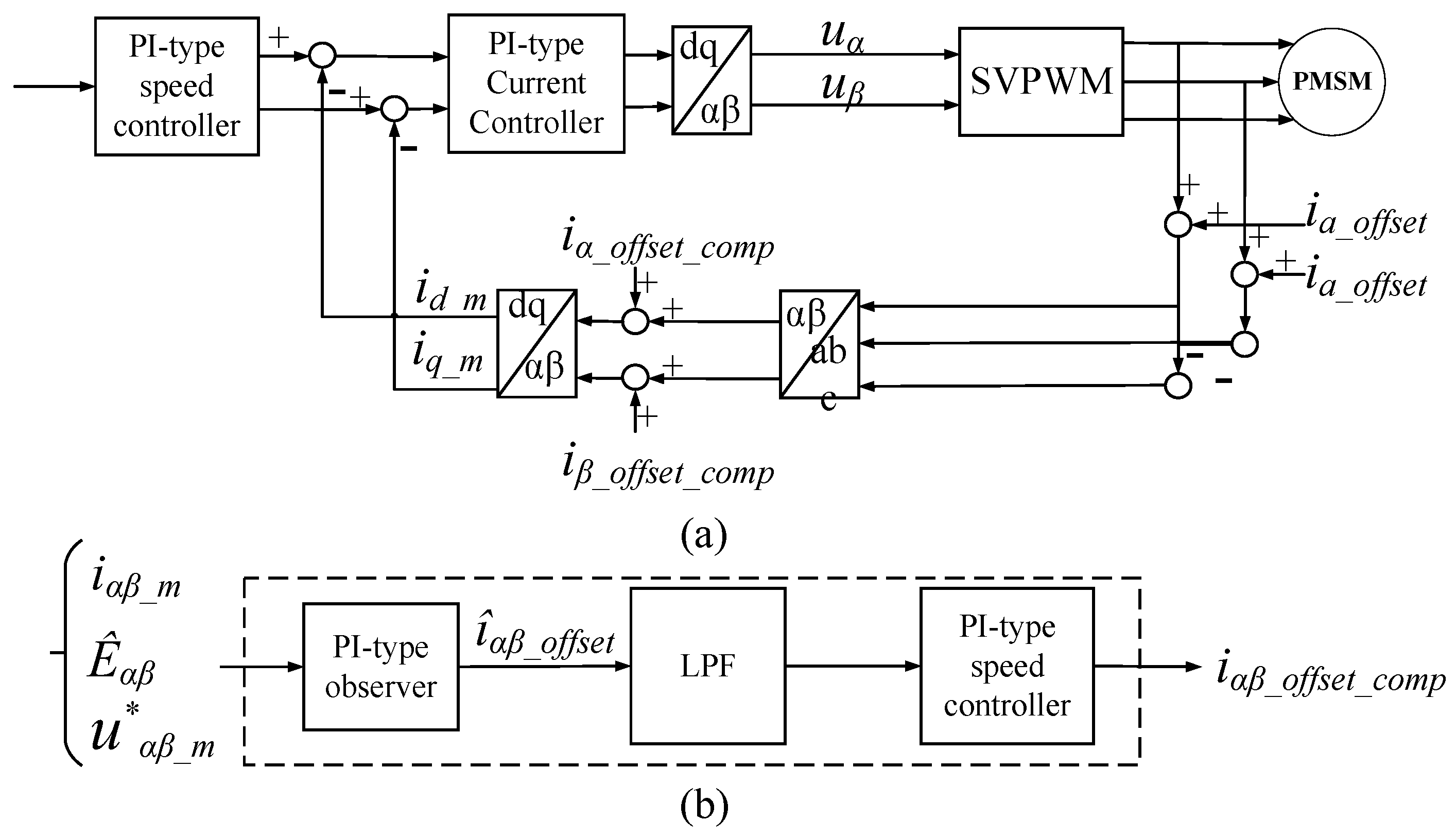
3.1. Overall Design
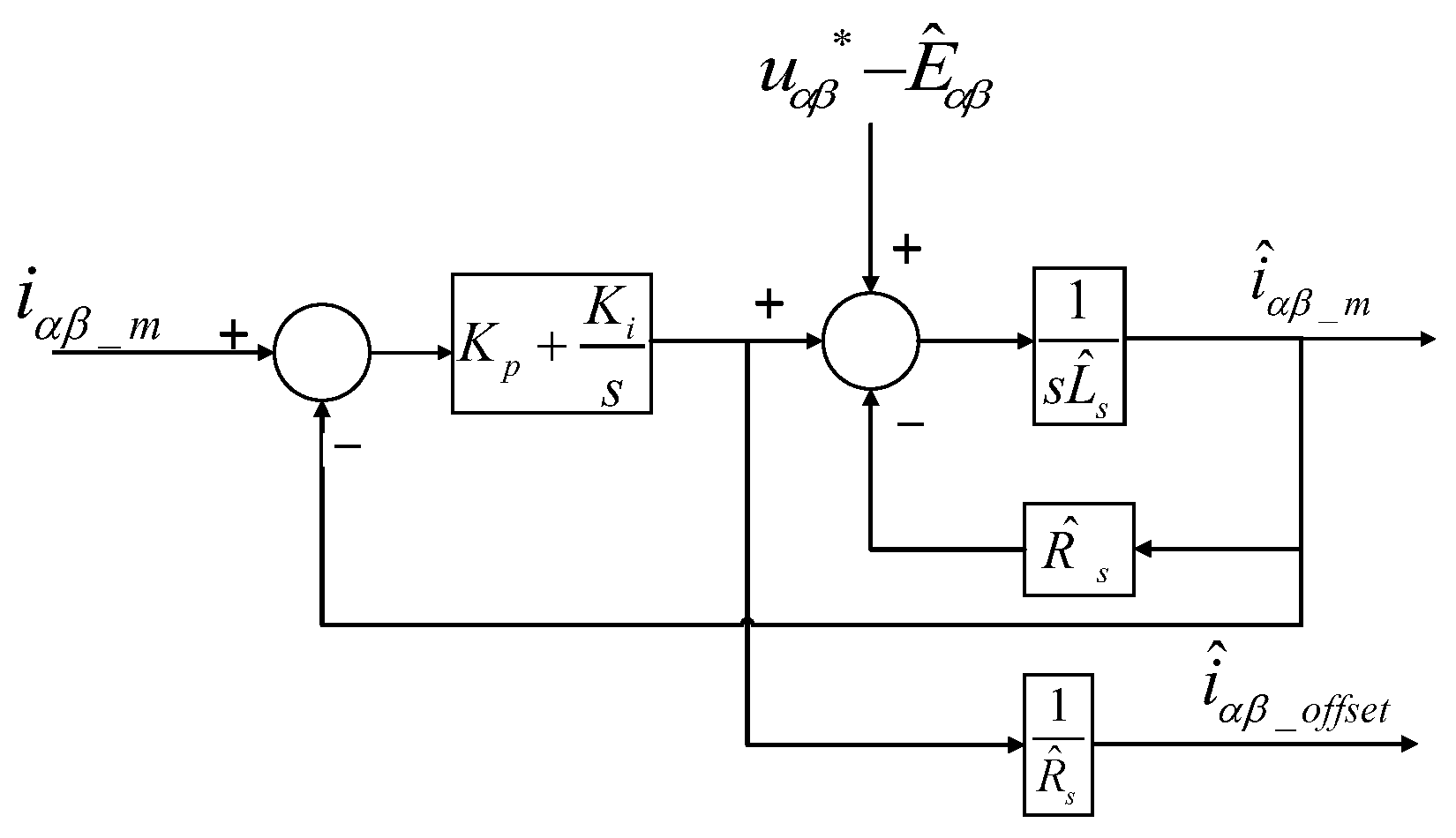
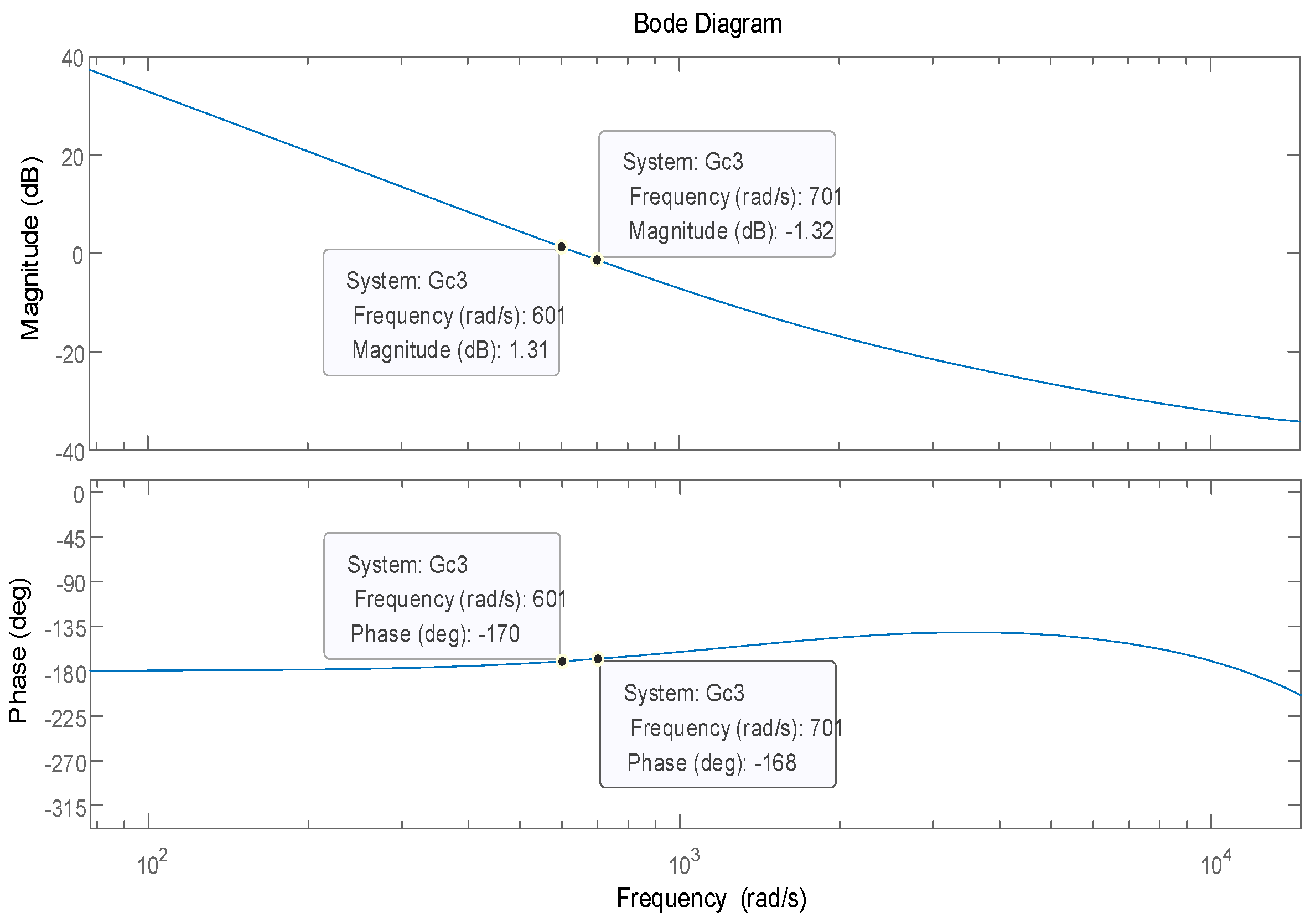
3.2. Design of the Observer
3.3. Design of Feed-Forward Compensation Method
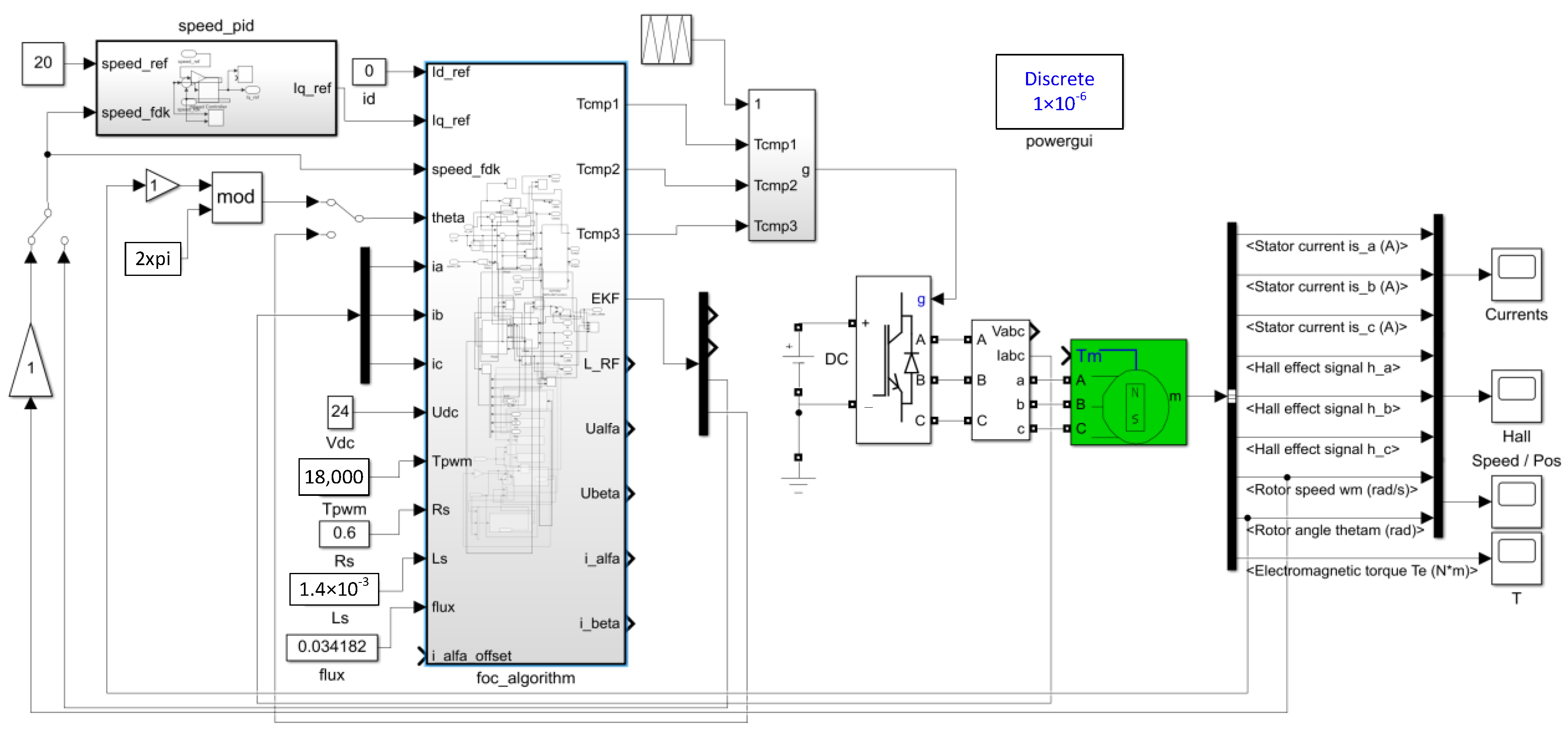
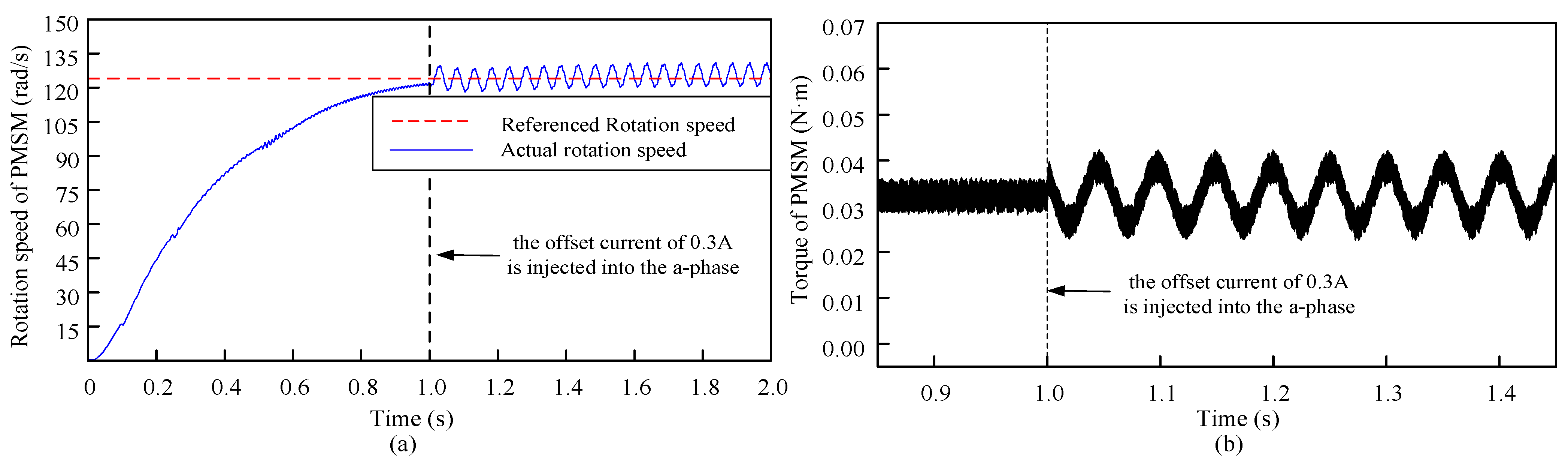
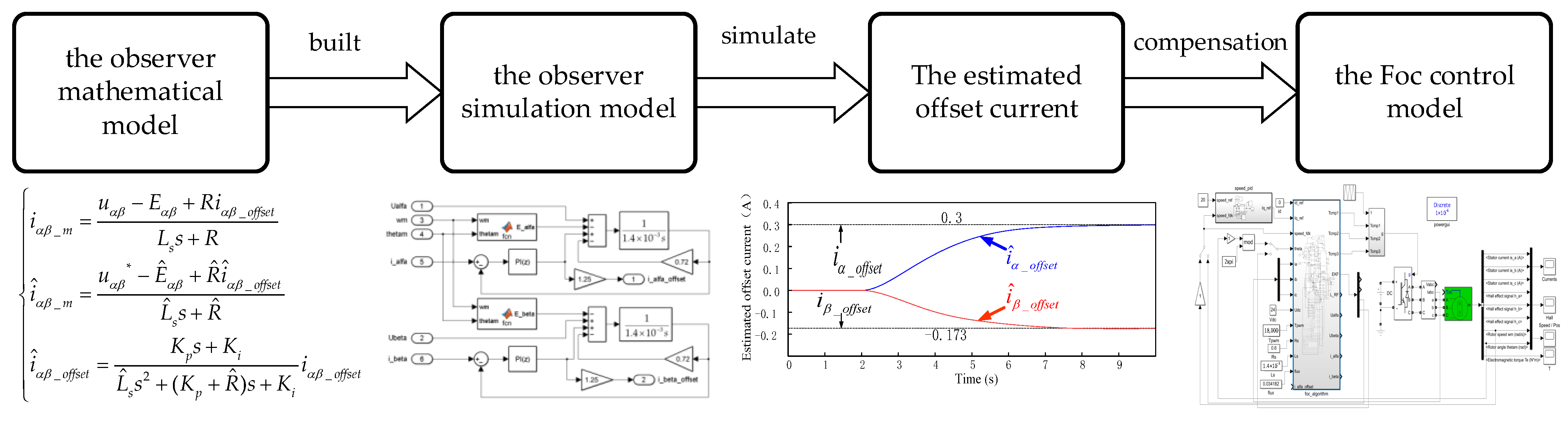
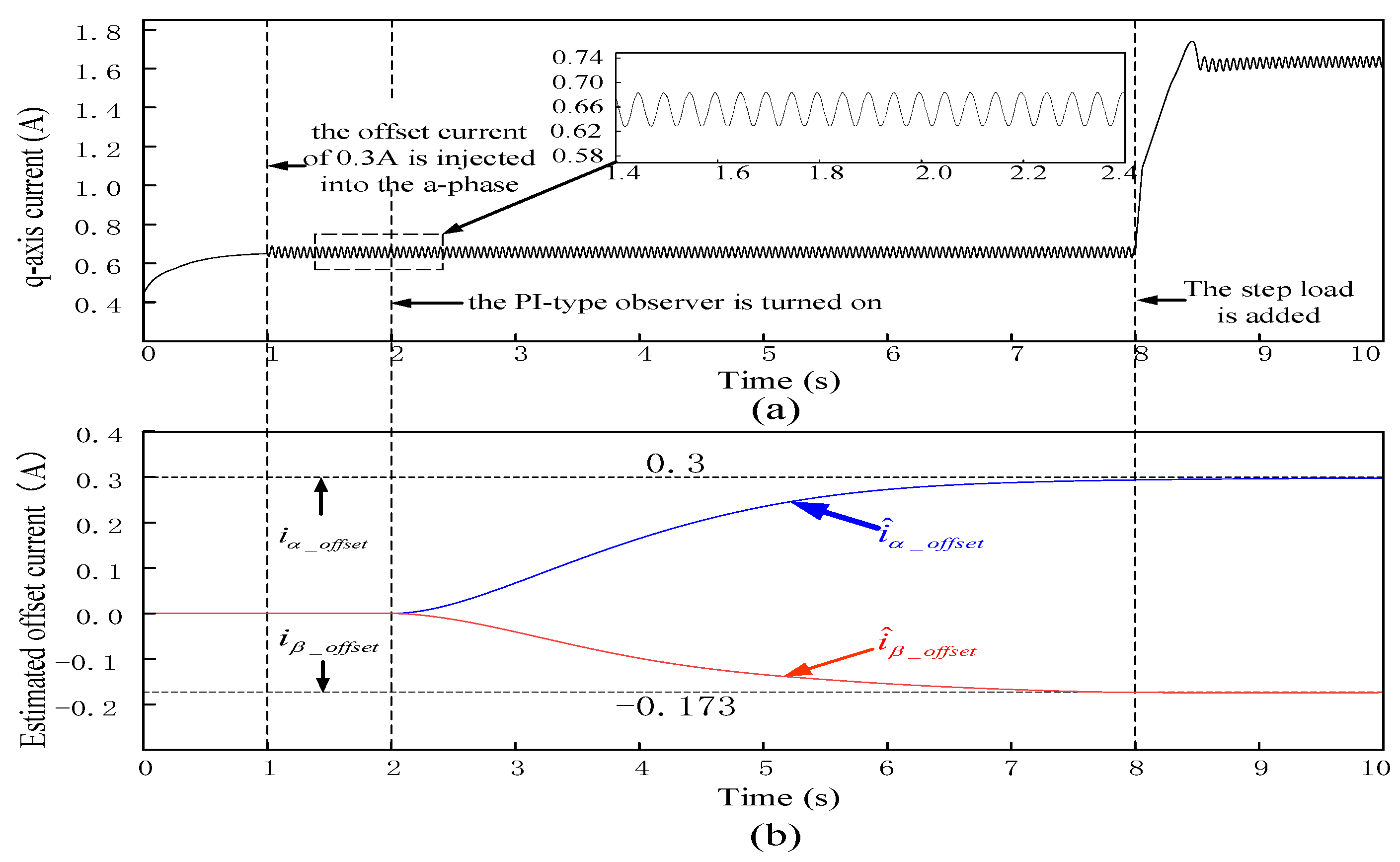
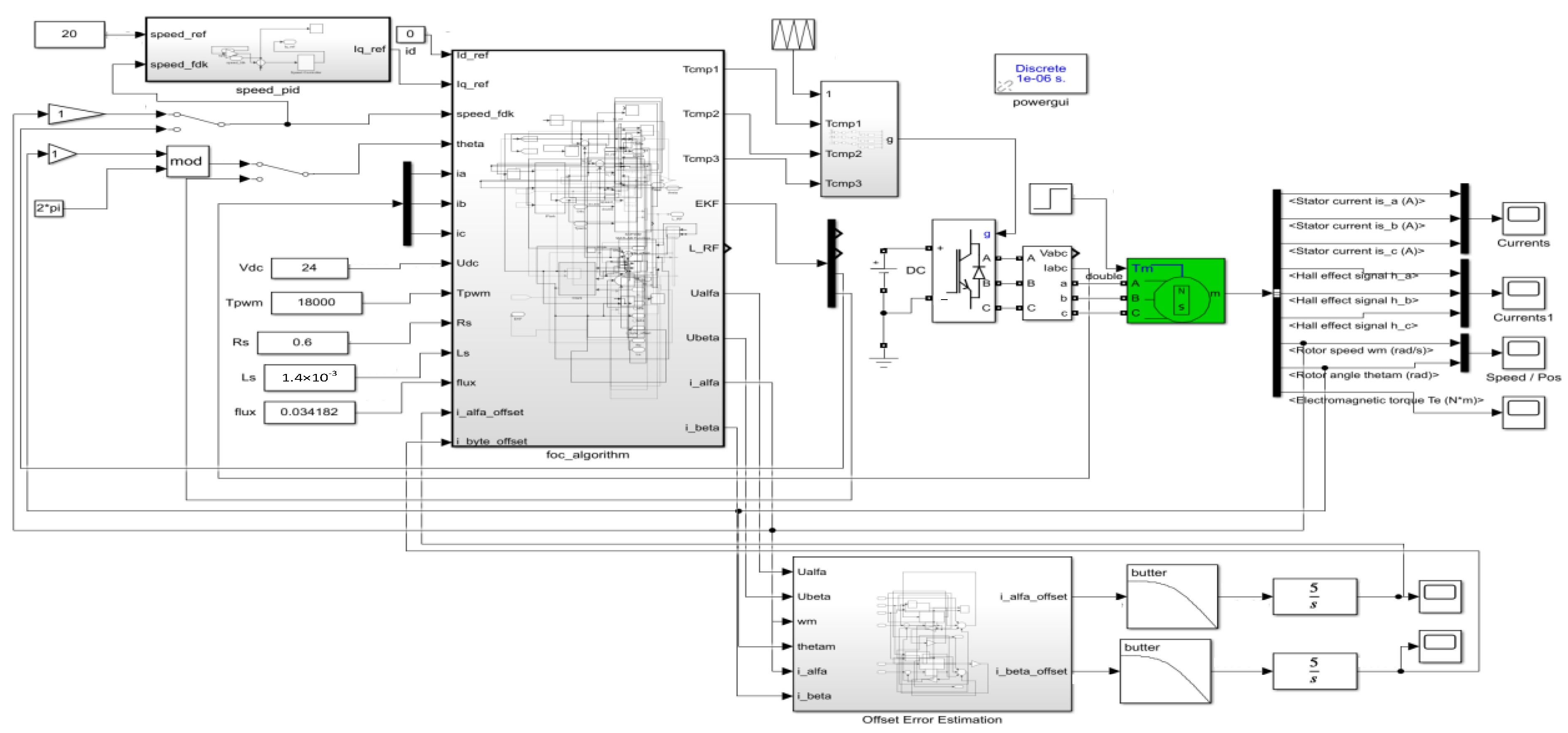
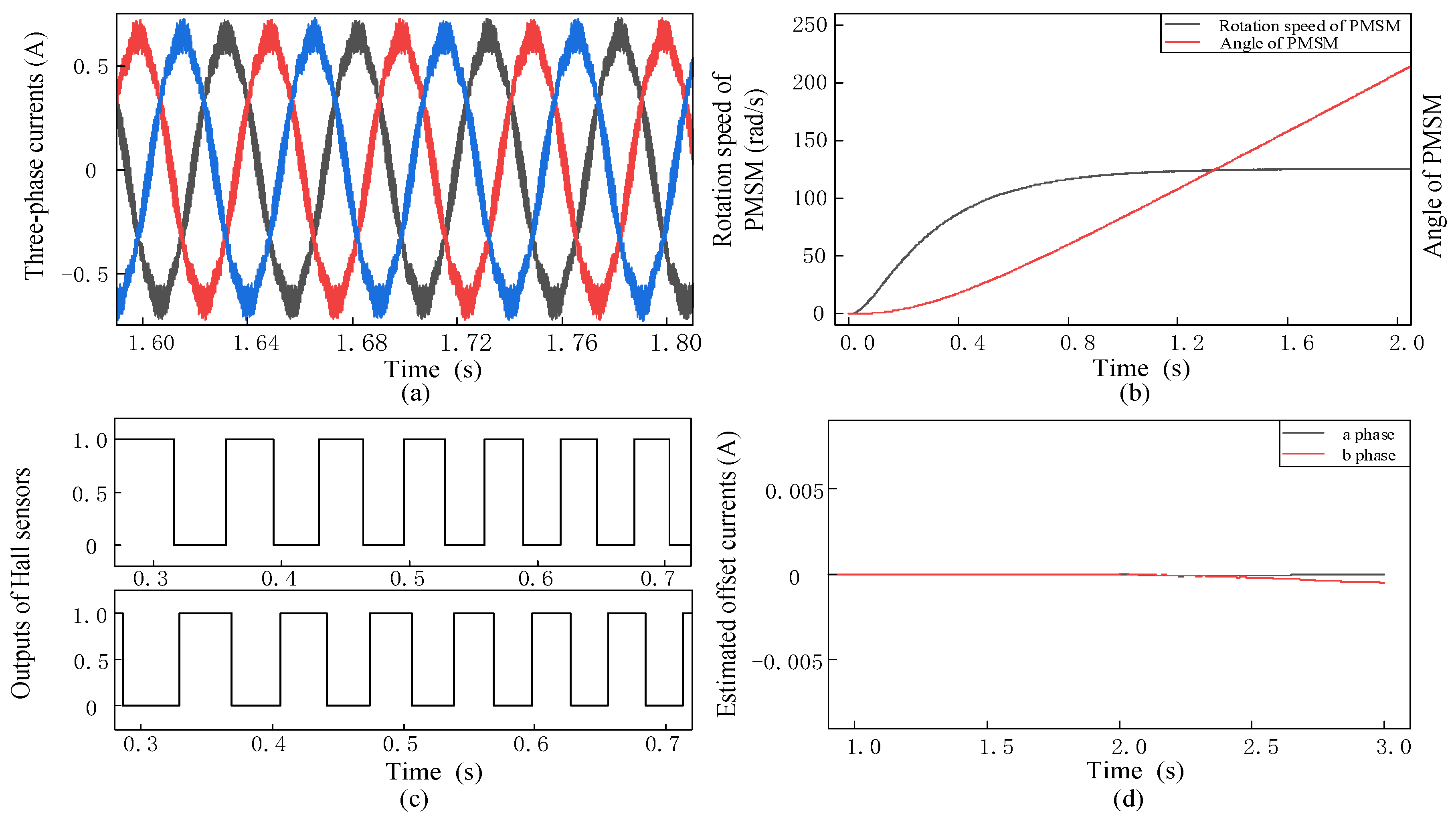
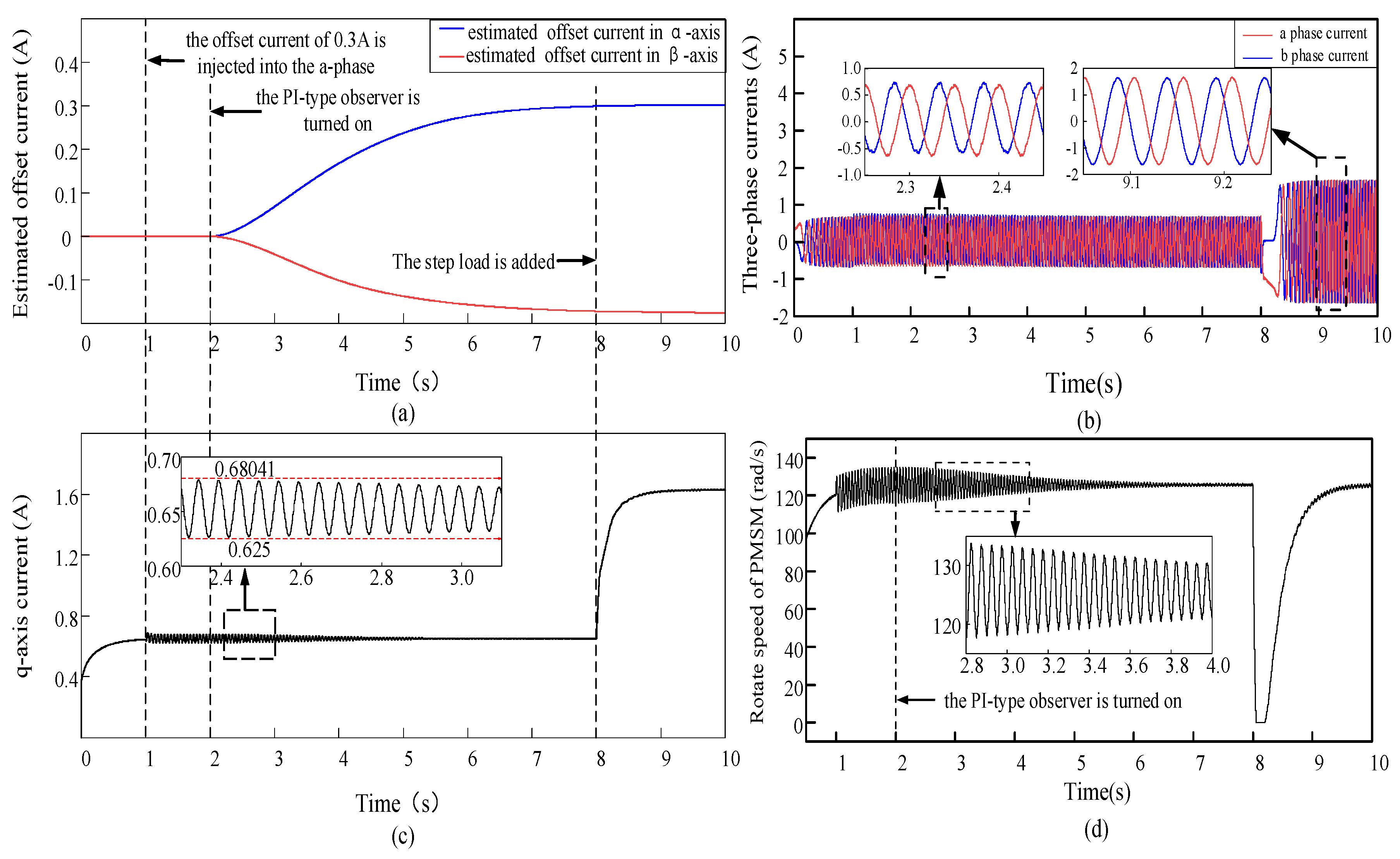
3.4. Simulation
4. Experimental Verifications
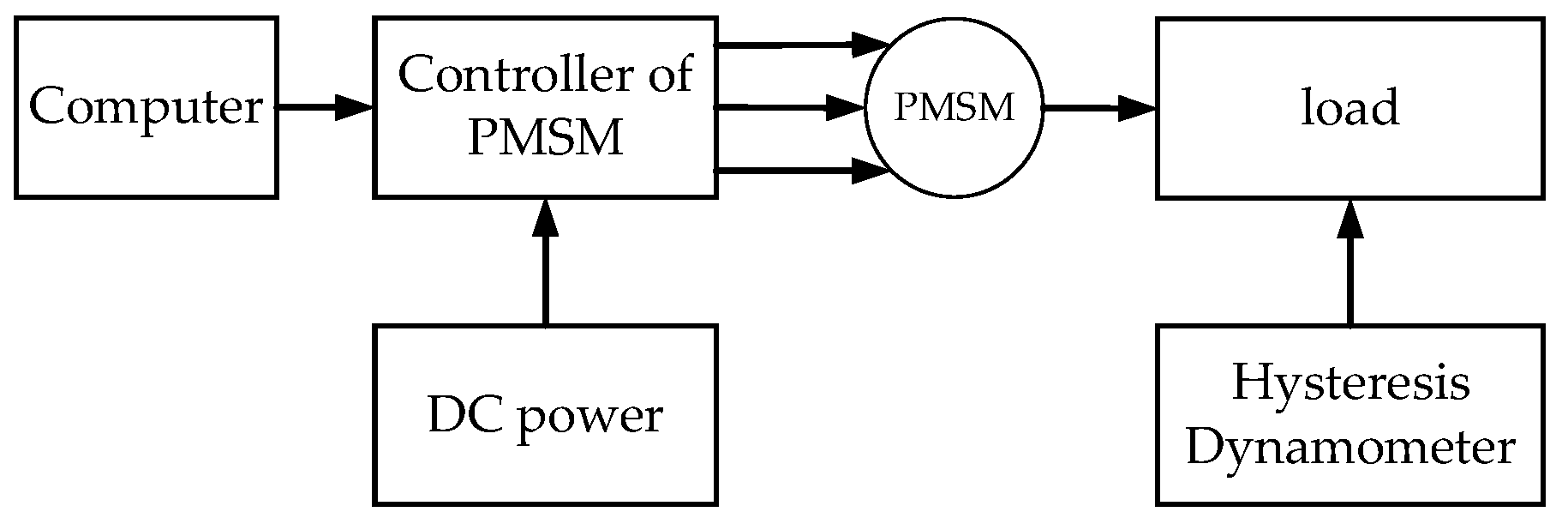
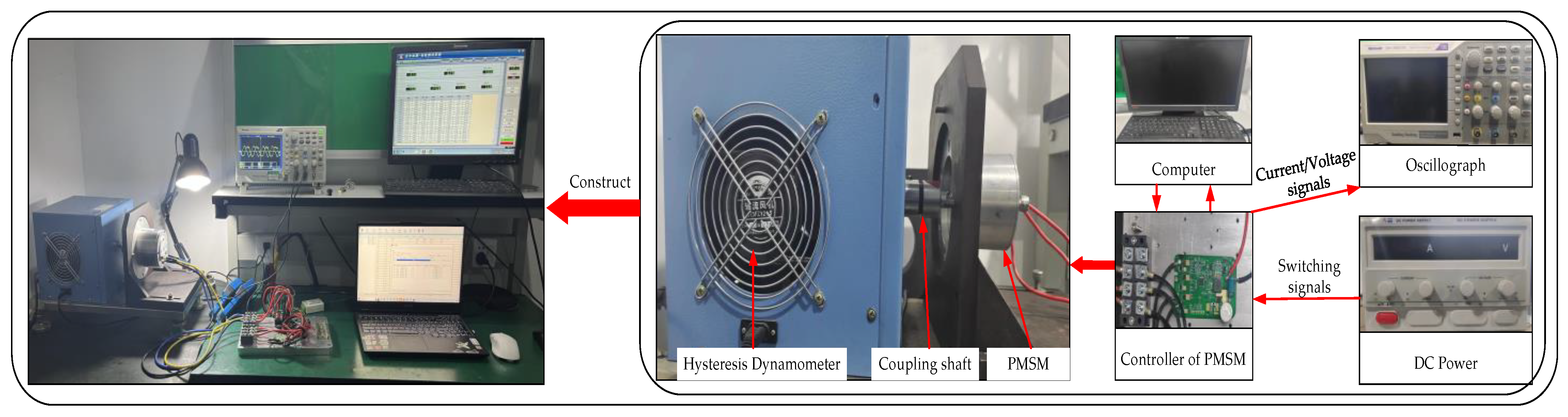
4.1. Construction of the Experimental Platform
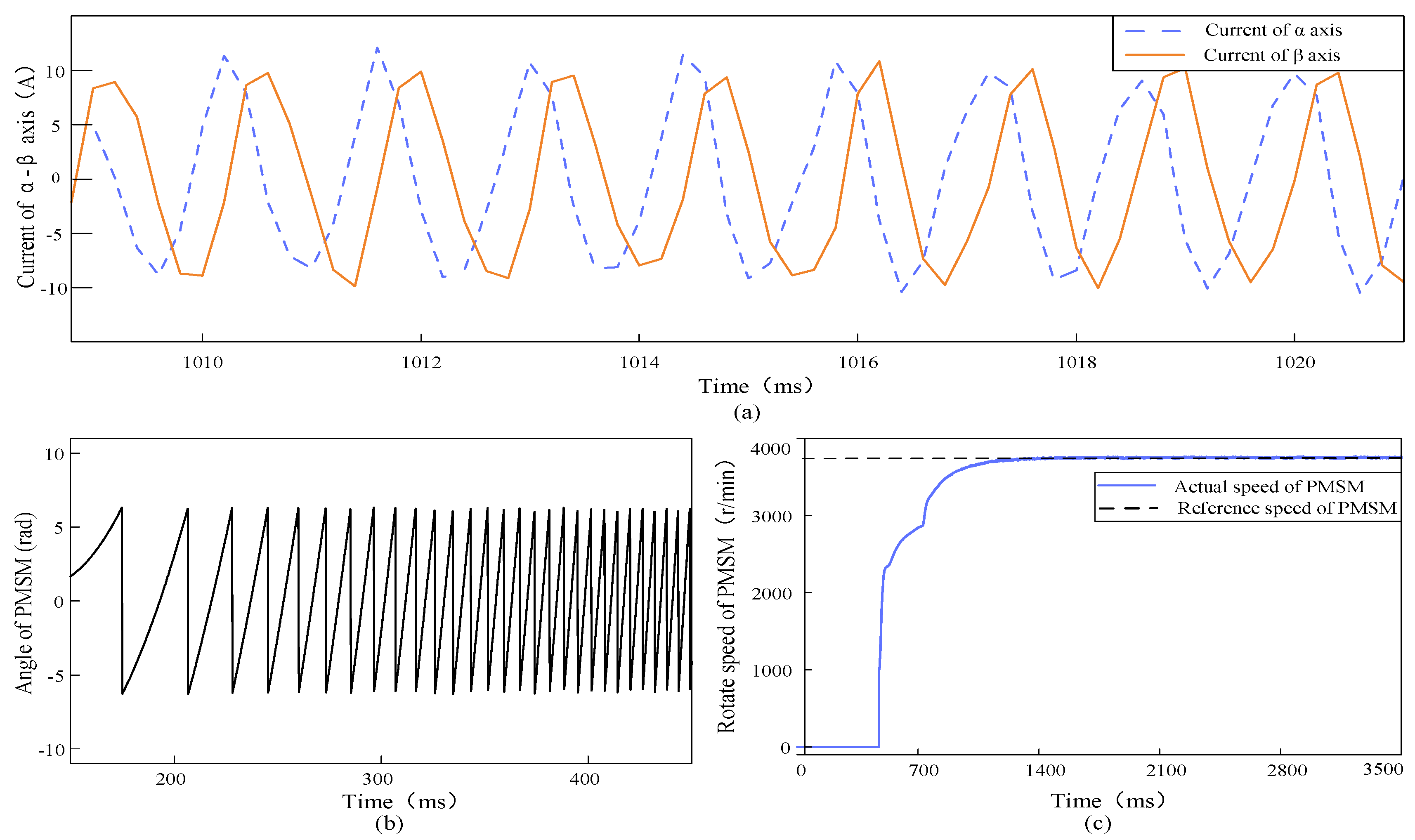
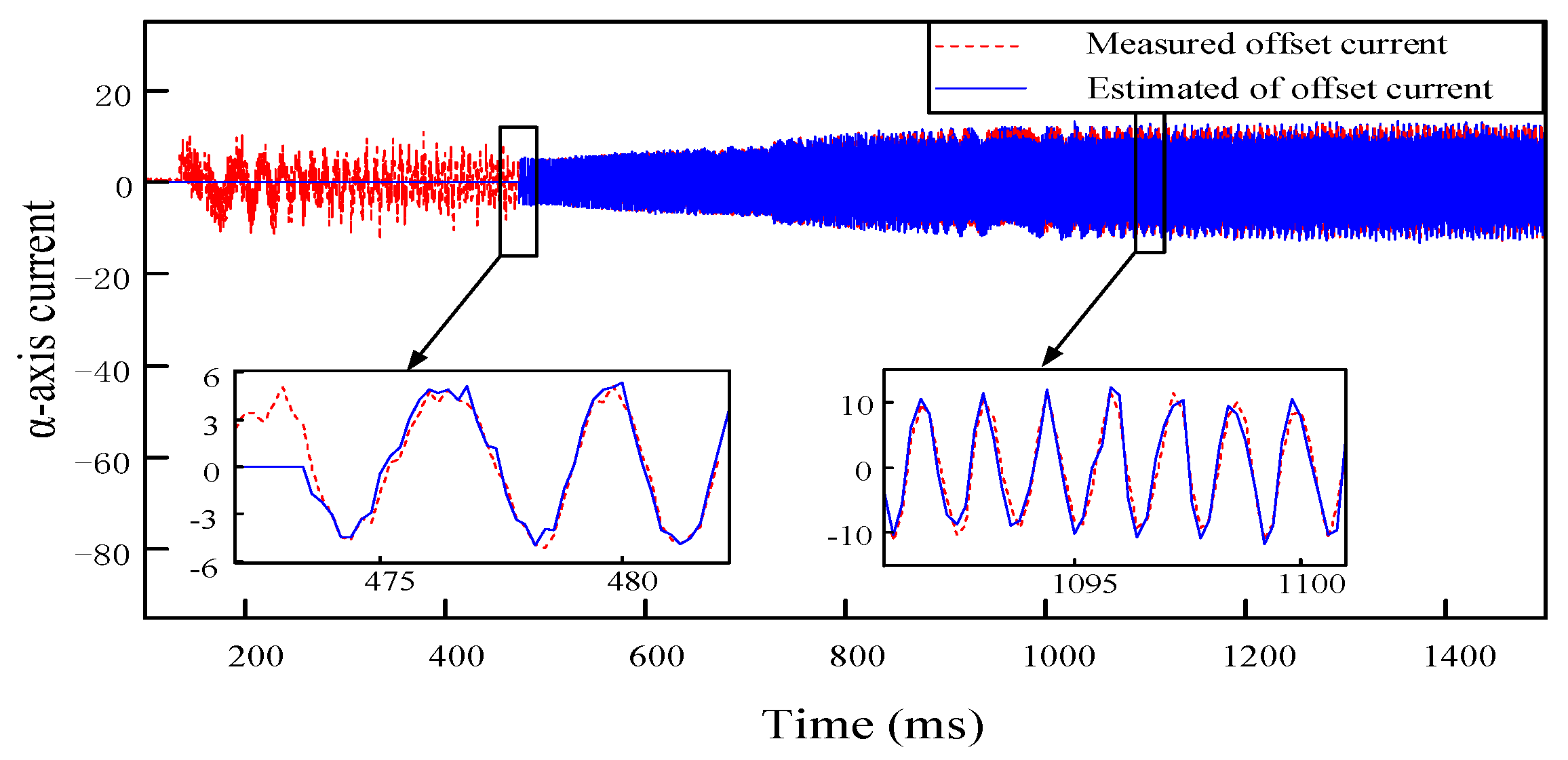
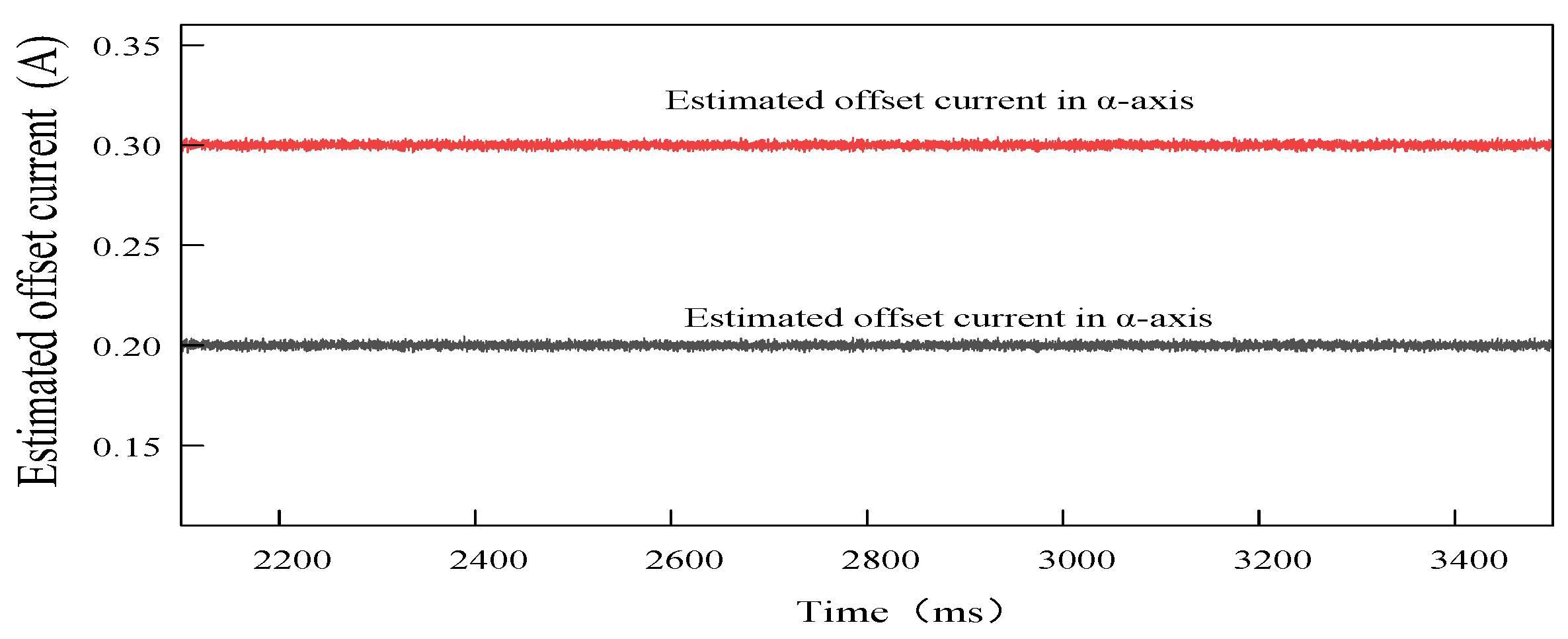
4.2. Results of the Experiment
5. Conclusions
- The sampling resistor in PMSM applications has a parasitic inductive-capacitive nature that causes current sampling bias, which further causes torque pulsation and leads to degradation of motor performance.
- The paper proposes a PI-type observer that can effectively obtain the offset error estimate value of phase currents by the online observation method.
- The paper proposes an online error compensation method that can rapidly compensate for phase current offset errors, effectively reducing motor rotation speed and torque pulsation caused by such errors, while exhibiting good dynamic performance.
- For the impact of the parasitic inductance of the sampling resistor on the PMSM drive control system, it is known that the offset current caused by it is periodic, this periodic signal can be further studied to eliminate the impact of the parasitic inductance of sampling resistor on the PMSM drive control system.
- When PMSM is running at low speed, operating frequency of the motor and the sampling resistor parasitic capacitance are small, many scholars ignore the impact of the sampling resistor parasitic capacitance on the PMSM drive control system. However, when the PMSM is running at high speed, the impact of the sampling resistor parasitic capacitance on the PMSM drive control system needs to be further clarified.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ullah, K.; Guzinski, J.; Mirza, A.F. Critical Review on Robust Speed Control Techniques for Permanent Magnet Synchronous Motor (PMSM) Speed Regulation. Energies 2022, 15, 1235. [Google Scholar] [CrossRef]
- Miguel-Espinar, C.; Heredero-Peris, D.; Gross, G.; Llonch-Masachs, M.; Montesinos-Miracle, D. Maximum torque per voltage flux-weakening strategy with speed limiter for PMSM drives. IEEE Trans. Ind. Electron. 2020, 68, 9254–9264. [Google Scholar] [CrossRef]
- Rafaq, M.S.; Jung, J.W. A comprehensive review of state-of-the-art parameter estimation techniques for permanent magnet synchronous motors in wide speed range. IEEE Trans. Ind. Inform. 2019, 16, 4747–4758. [Google Scholar] [CrossRef]
- Guo, L.; Wang, Y.; Wang, H.; Zhang, Z. Design of high power density double-stator permanent magnet synchronous motor. IET Electr. Power Appl. 2023, 17, 421–431. [Google Scholar] [CrossRef]
- Xu, W.; Junejo, A.K.; Liu, Y.; Islam, M.R. Improved continuous fast terminal sliding mode control with extended state observer for speed regulation of PMSM drive system. IEEE Trans. Veh. Technol. 2019, 68, 10465–10476. [Google Scholar] [CrossRef]
- Pindoriya, R.M.; Tejan, K.V.; Rajpurohit, B.S. Speed control of sensorless PMSM drive using adaptive current control prediction technique. Electr. Eng. 2023, 105, 1209–1221. [Google Scholar] [CrossRef]
- Zhang, K.; Chu, J. Position extraction strategy of rotating high-frequency signal injection based on double-angle coordinate system. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 1967–1971. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, S.; Chen, C. Review of sensorless control techniques for PMSM drives. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 1543–1552. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.; Lee, C.H.; Song, Z. A critical review of advanced electric machines and control strategies for electric vehicles. Proc. IEEE 2020, 109, 1004–1028. [Google Scholar] [CrossRef]
- Gora, R.; Biswas, R.; Garg, R.K.; Nangia, U. Field Oriented Control of Permanent Magnet Synchronous Motor (PMSM) Driven Electric Vehicle and its Performance Analysis. In Proceedings of the 2021 IEEE 4th International Conference on Computing, Power and Communication Technologies (GUCON), Kuala Lumpur, Malaysia, 24–26 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Sun, T.; Wang, J.; Jia, C.; Peng, L. Integration of FOC with DFVC for interior permanent magnet synchronous machine drives. IEEE Access 2020, 8, 97935–97945. [Google Scholar] [CrossRef]
- Popov, A.; Lapshina, V.; Briz, F.; Gulyaev, I. Dynamic operation of FOC induction machines under current and voltage constraints. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. 1–10. [Google Scholar] [CrossRef]
- Liu, T.Y.; Chen, C.H.; Chi, W.C.; Cheng, M.Y. Study on the current control loop of PMSM based on sinusoidal commutation. In Proceedings of the 2011 IEEE Ninth International Conference on Power Electronics and Drive Systems, Singapore, 5–8 December 2011; pp. 670–675. [Google Scholar] [CrossRef]
- Huang, M.; Deng, Y.; Li, H.; Wang, J. Torque ripple suppression of PMSM using fractional-order vector resonant and robust internal model control. IEEE Trans. Transp. Electrif. 2021, 7, 1437–1453. [Google Scholar] [CrossRef]
- Zuo, Y.; Zhang, X.; Lai, C.; Iyer, L.V. Correction of Current Measurement Scaling and Offset Errors for Permanent Magnet Synchronous Machine Drives. In Proceedings of the 2023 12th International Conference on Renewable Energy Research and Applications (ICRERA), Oshawa, ON, Canada, 29 August–1 September 2023; pp. 283–288. [Google Scholar] [CrossRef]
- Hu, M.; Hua, W.; Wu, Z.; Dai, N.; Xiao, H.; Wang, W. Compensation of current measurement offset error for permanent magnet synchronous machines. IEEE Trans. Power Electron. 2020, 35, 11119–11128. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, H.; Guo, C.; Liu, Y.; Wang, D.; Lu, K.; Zhang, Z.; Zhuang, X.; Chen, D. An adaptive proportional-integral-resonant controller for speed ripple suppression of PMSM drive due to current measurement error. Int. J. Electr. Power Energy Syst. 2021, 129, 106866. [Google Scholar] [CrossRef]
- Zuo, Y.; Wang, H.; Ge, X.; Zuo, Y.; Woldegiorgis, A.T.; Feng, X.; Lee, C.H. A Novel Current Measurement Offset Error Compensation Method Based on the Adaptive Extended State Observer for IPMSM Drives. IEEE Trans. Ind. Electron. 2023, 71, 3371–3382. [Google Scholar] [CrossRef]
- Yan, L.; Liao, Y.; Lin, H.; Sun, J. Torque ripple suppression of permanent magnet synchronous machines by minimal harmonic current injection. IET Power Electron. 2019, 12, 1368–1375. [Google Scholar] [CrossRef]
- Xiao, S.; Shi, T.; Li, X.; Wang, Z.; Xia, C. Single-current-sensor control for PMSM driven by quasi-Z-source inverter. IEEE Trans. Power Electron. 2018, 34, 7013–7024. [Google Scholar] [CrossRef]
- Lee, S.; Kim, H.; Lee, K. Current measurement offset error compensation in vector-controlled SPMSM drive systems. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2619–2628. [Google Scholar] [CrossRef]
- Trinh, Q.N.; Wang, P.; Choo, F.H. An improved control strategy of three-phase PWM rectifiers under input voltage distortions and DC-offset measurement errors. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1164–1176. [Google Scholar] [CrossRef]
- Lee, K.W.; Kim, S.I. Dynamic performance improvement of a current offset error compensator in current vector-controlled SPMSM drives. IEEE Trans. Ind. Electron. 2018, 66, 6727–6736. [Google Scholar] [CrossRef]
- Bai, Y.; Li, B.; Wang, Q.; Ding, D.; Zhang, G.; Wang, G.; Xu, D. An adaptive-frequency harmonic suppression strategy based on vector reconstruction for current measurement error of PMSM drives. IEEE Trans. Power Electron. 2022, 38, 34–40. [Google Scholar] [CrossRef]
- Lei, M.; Peng, T.; Zhou, F.; Yu, J.; Liang, S.; Liu, J.; Li, L. Optimal design and implementation of tunnelling magnetoresistance based small current sensor with temperature compensation. Energy Rep. 2022, 8, 137–146. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Tadano, Y.; Hoshi, N. Compensation of the current measurement error with periodic disturbance observer for motor drive. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014-ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 1242–1246. [Google Scholar] [CrossRef]
- Zhang, K.; Fan, M.; Yang, Y.; Zhu, Z.; Garcia, C.; Rodriguez, J. An improved adaptive selected harmonic elimination algorithm for current measurement error correction of PMSMs. IEEE Trans. Power Electron. 2021, 36, 13128–13138. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, H.; Liu, Y.; Guo, C.; Zhang, F.; Zhang, Z.; Li, G. A Novel Error-Injected Solution for Compensation of Current Measurement Errors in PMSM Drive. IEEE Trans. Ind. Electron. 2022, 70, 4608–4619. [Google Scholar] [CrossRef]
- Ye, S.; Yao, X. An enhanced SMO-based permanent-magnet synchronous machine sensorless drive scheme with current measurement error compensation. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4407–4419. [Google Scholar] [CrossRef]
- Kim, S.I.; Kim, J.Y.; Lee, K.W. Current Measurement Offset Error Compensation Scheme Considering Saturation of Current Controller in SPMSM Drives. IEEE Access 2023, 11, 17233–17240. [Google Scholar] [CrossRef]
- Wang, J.; Yang, H.; Liu, Y.; Rodríguez, J. Low-cost multistep FCS-MPCC for PMSM drives using a DC link single current sensor. IEEE Trans. Power Electron. 2022, 37, 11034–11044. [Google Scholar] [CrossRef]
- Badini, S.S.; Verma, V.; Tariq, M.; Urooj, S. Single Current Sensor-Based Speed Sensorless Vector Controlled PMSM Drive. IEEE Access 2023, 11, 86362–86376. [Google Scholar] [CrossRef]
- Attaianese, C.; D’Arpino, M.; Di Monaco, M.; Di Noia, L.P. Model-based detection and estimation of dc offset of phase current sensors for field oriented pmsm drives. IEEE Trans. Ind. Electron. 2022, 70, 6316–6325. [Google Scholar] [CrossRef]
- Attaianese, C.; D’Arpino, M.; Di Monaco, M.; Di Noia, L.P. Modeling and Detection of Phase Current Sensor Gain Faults in PMSM Drives. IEEE Access 2022, 10, 80106–80118. [Google Scholar] [CrossRef]
- Suzuki, T.; Hayashi, Y.; Kabune, H.; Ito, N. Pulsewidth modulation control algorithm for a six-phase PMSM: Reducing the current in the inverter capacitor and current sensing with resistors. IEEE Trans. Ind. Electron. 2018, 66, 4240–4249. [Google Scholar] [CrossRef]
- Li, Z.; Gao, Q. A prediction-based current sampling scheme using three resistors for induction motor drives. IEEE Trans. Power Electron. 2017, 33, 6082–6092. [Google Scholar] [CrossRef]
- Tang, Q.; Shen, A.; Li, W.; Luo, P.; Chen, M.; He, X. Multiple-positions-coupled sampling method for PMSM three-phase current reconstruction with a single current sensor. IEEE Trans. Power Electron. 2019, 35, 699–708. [Google Scholar] [CrossRef]
- Wang, F.; He, L.; Rodriguez, J. FPGA-based continuous control set model predictive current control for PMSM system using multistep error tracking technique. IEEE Trans. Power Electron. 2020, 35, 13455–13464. [Google Scholar] [CrossRef]
- Daotan, L.; Yong, W.; Zhenfeng, X.; Qin, W.; Shengzong, H. Study on the Effect of Thin Resistive Film’s Structure on the Reliability of Automotive Electronics. In Proceedings of the 2019 20th International Conference on Electronic Packaging Technology (ICEPT), Hong Kong, China, 12–15 August 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Winkelholz, J.; Hitzemann, M.; Nitschke, A.; Zygmanowski, A.; Zimmermann, S. Resistive High-Voltage Probe with Frequency Compensation by Planar Compensation Electrode Integrated in Printed Circuit Board Design. Electronics 2022, 11, 3446. [Google Scholar] [CrossRef]
- Chang, C.; He, L.; Bian, B.; Han, X. Design of a highly accuracy PSR CC/CV AC–DC converter based on a cable compensation scheme without an external capacitor. IEEE Trans. Power Electron. 2019, 34, 9552–9561. [Google Scholar] [CrossRef]
- Feng, L.; Deng, M.; Xu, S.; Huang, D. Speed regulation for PMSM drives based on a novel sliding mode controller. IEEE Access 2020, 8, 63577–63584. [Google Scholar] [CrossRef]
- Yadav, D.S.; Ali, J. In Investigating and Controlling the Speed Performance of Field Oriented Controlled Surface Mounted Permanent Magnet Synchronous Motor in the Constant Torque Region. In Proceedings of the 2022 IEEE 10th Region 10 Humanitarian Technology Conference (R10-HTC), Hyderabad, India, 16–18 September 2022; pp. 173–177. [Google Scholar] [CrossRef]
- Lu, K.; Zhu, Y.; Wu, Z.; Xiao, M. Suppression of current fluctuations and the brake torque for PMSM shutoff in electric vehicles. Math. Probl. Eng. 2019, 2019, 5026316. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| Rated power | 420 W | |
| Rated current | 15 A | |
| Pole pairs | 2 | |
| Stator resistance | 9 mΩ | |
| d-axis inductance | 93 μH | |
| q-axis inductance | 93 μH | |
| Flue | 0.0175 Wb | |
| Input voltage of power stage | 12 V |
| Type of Work | Rotation Speed | Injected Offset Current | Response Time | Outputs of PI Observer | Operation of PMSM |
|---|---|---|---|---|---|
| simulation | 120 rad/s | 0.3 A 1 | 5 s | 0.3 A 3 | normal |
| −0.3 A 2 | −0.173 A 4 | ||||
| experiment | 63 rad/s | 0.3 A 1 | 622 ms | 0.3 A 3 | normal |
| −0.3 A 2 | −0.175 A 4 |
| Works | Rotation Speed | Method of Compensation | Compensating Object | Difficulty | Scope of Application |
|---|---|---|---|---|---|
| Ref. [24] | 167 rad/min | Online | Current of q-axis and d-axis | Moderate | Low speed |
| Ref. [26] | 500 rad/min | Online | Current of q-axis and d-axis | Easy | Low speed |
| Ref. [27] | 150 rad/min | Online | Current of q-axis and d-axis | Easy | Low speed |
| Ref. [28] | 1000 rad/min | Offline | Current of a-axis and b-axis | Difficult | Low speed |
| Ref. [29] | 2000 rad/min | Online | Current of q-axis and d-axis | Difficult | Middle speed |
| Ours works | 3780 rad/min | Online | Current of α-axis and β-axis | Easy | Middle speed |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, X.; Hu, J.; Yu, Y.; Zhou, R.; Yu, Q. Analysis and Compensation of Phase Current Measuring Error Caused by Sensing Resistor in PMSM Application. Sensors 2024, 24, 1538. https://doi.org/10.3390/s24051538
Cheng X, Hu J, Yu Y, Zhou R, Yu Q. Analysis and Compensation of Phase Current Measuring Error Caused by Sensing Resistor in PMSM Application. Sensors. 2024; 24(5):1538. https://doi.org/10.3390/s24051538
Chicago/Turabian StyleCheng, Xin, Jinfeng Hu, Ye Yu, Rougang Zhou, and Qiang Yu. 2024. "Analysis and Compensation of Phase Current Measuring Error Caused by Sensing Resistor in PMSM Application" Sensors 24, no. 5: 1538. https://doi.org/10.3390/s24051538
APA StyleCheng, X., Hu, J., Yu, Y., Zhou, R., & Yu, Q. (2024). Analysis and Compensation of Phase Current Measuring Error Caused by Sensing Resistor in PMSM Application. Sensors, 24(5), 1538. https://doi.org/10.3390/s24051538