
The GM-JMNS-CPHD Filtering Algorithm for Nonlinear Systems Based on a Generalized Covariance Intersection

Abstract
1. Introduction
2. Research Background
2.1. GM-CPHD Filter
- Prediction of CPHD
- 2.
- Updates to the CPHD
- (1)
- Prediction of the GM-CPHD Filter
- (2)
- Update to the GM-CPHD filter
2.2. GM-JMNS-CPHD Filter
2.2.1. JMNS-CPHD Filtering
- (1)
- Prediction of the JMNS-CPHD Filter
- (2)
- Update to the JMNS-CPHD filter
2.2.2. Gaussian Mixture JMNS-CPHD Filtering
- (1)
- Prediction of the GM-JMNS-CPHD Filter
- (2)
- Update to the GM-JMNS-CPHD filter
2.3. Integration Criteria
2.3.1. CI Fusion Strategy
2.3.2. ICI Fusion Strategy
3. Application of a Generalized Covariance Intersection for Multitarget Tracking in the GM-JMNS-CPHD
3.1. GCI-GM-JMNS-CPHD
| Algorithm 1: GCI-GM-JMNSCPHD filtering algorithm process. |
| 1. Calculate the distribution GM-JMNS-CPHD results according to Formulas (25)–(38), calculate the prediction of GM-JMNS-CPHD, and update 2. For M sensors 3. Using the Formulas (56)–(58) GCI fusion strategy to calculate weights 4. Calculate different separately 5. Calculate the next level fusion result based on the previous level fusion result 6. Modify and improve GCI-GM-CPHD through “pruning” and “merging” 7. end for 8. Estimate extraction |
3.2. GICI-GM-JMNS-CPHD
| Algorithm 2: GICI-GM-JMNSCPHD filtering algorithm process. |
| 1. Calculate the distribution GM-JMNSCPHD results according to Formulas (28)–(41), calculate the prediction of GM-JMNSCPHD, and update 2. For M sensors 3. Using the Formulas (59)–(61) GCI fusion strategy to calculate weights 4. Replace the covariance of a single sensor probability density of with 5. Calculate the next level fusion result based on the previous level fusion result 6. Calculate GM covariance through (54)–(61) 7. Modify and improve GCI-GM-CPHD through “pruning” and “merging” 8. End for 9. Estimate extraction |
4. Modeling and Simulation
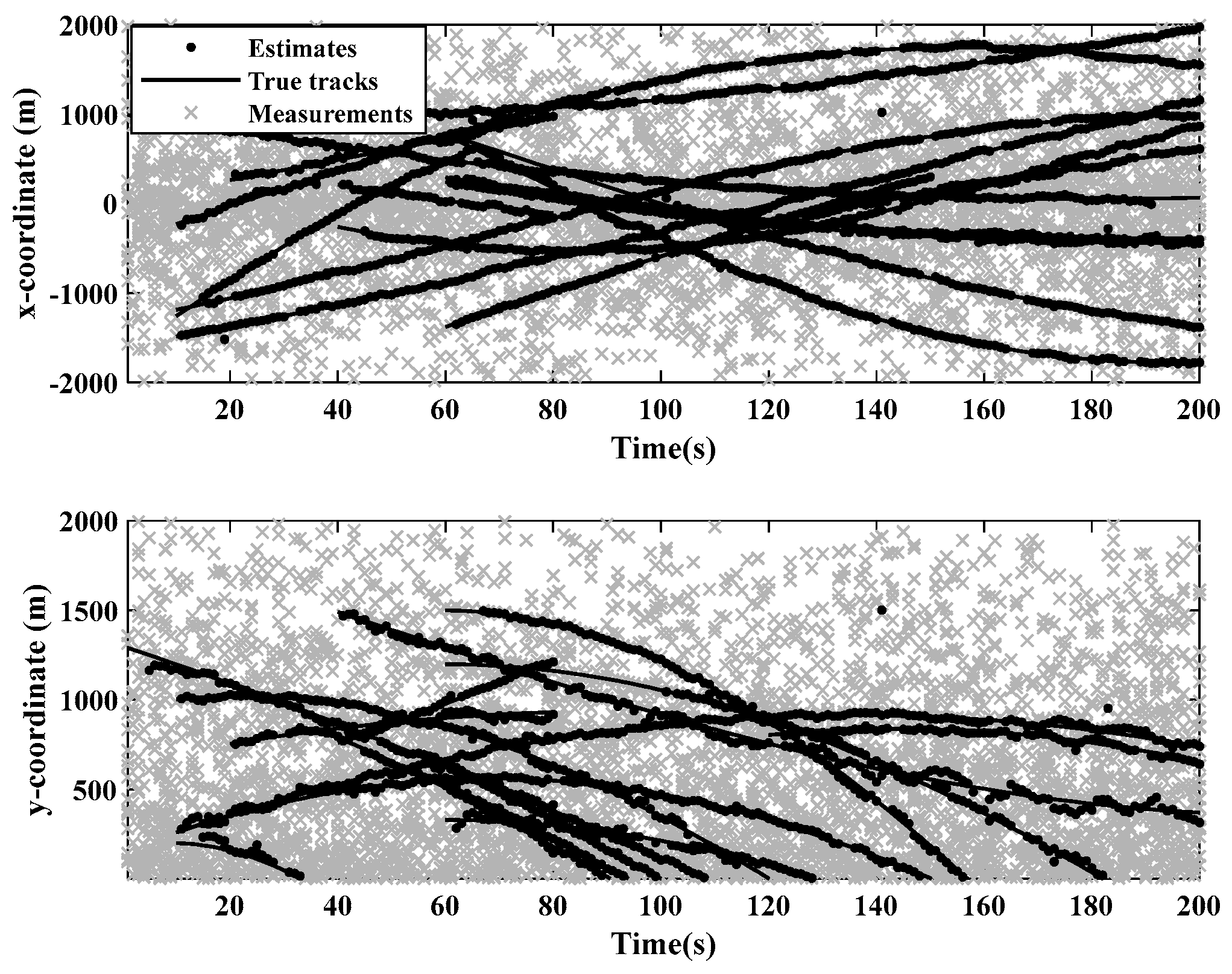
4.1. Effectiveness of the GM-JMNS-CPHD Algorithm
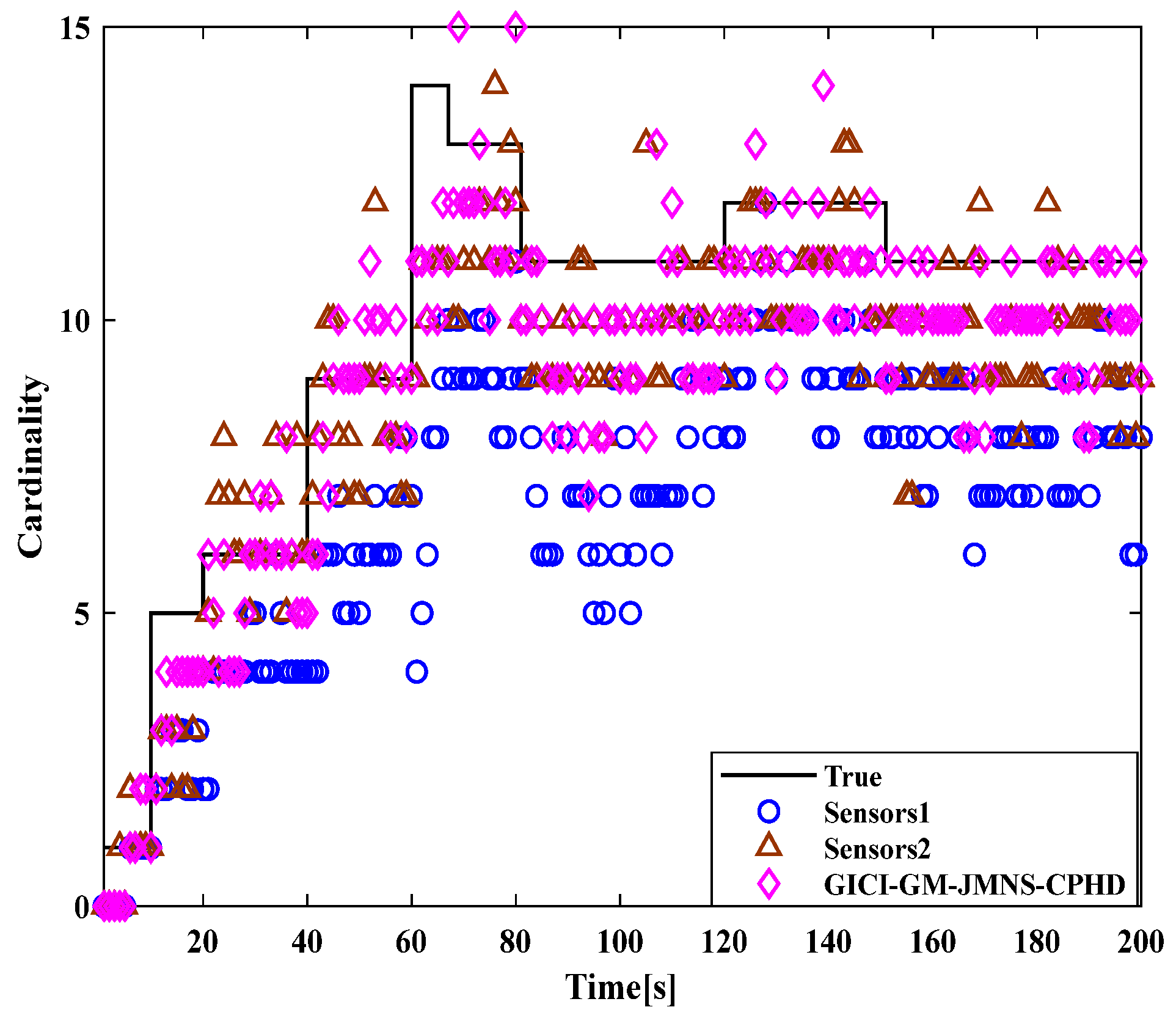
4.2. Implementation of the GICI-GM-JMNS-CPHD Algorithm
5. Summary and Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lima, K.M.d.; Costa, R.R. Cooperative-PHD Tracking Based on Distributed Sensors for Naval Surveillance Area. Sensors 2022, 22, 729. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Bao, Q.; Chen, Z. Refined PHD Filter for Multi-Target Tracking under Low Detection Probability. Sensors 2019, 19, 2842. [Google Scholar] [CrossRef] [PubMed]
- Wei, S.; Zhang, B.; Yi, W. Trajectory PHD and CPHD Filters With Unknown Detection Profile. IEEE Trans. Veh. Technol. 2022, 71, 8. [Google Scholar] [CrossRef]
- Wu, M.; Zheng, D.; Yuan, J.; Zhang, S.; Chen, A.; Cheng, B. Probability hypothesis density filter with low detection probability. In Proceedings of the IET International Radar Conference (IET IRC 2020), Online, 4–6 November 2020; pp. 1276–1282. [Google Scholar] [CrossRef]
- Ding, C.; Zhou, D.; Du, R.; Zou, X. Distributed Multitarget Tracking Using Chernoff Fusion in SMC-CPHD Filtering. In Proceedings of the 2022 China Automation Congress (CAC), Xiamen, China, 25–27 November 2022; pp. 3163–3168. [Google Scholar] [CrossRef]
- Chen, X.; Li, Y.; Li, Y.; Yu, J. PHD and CPHD Algorithms Based on a Novel Detection Probability Applied in an Active Sonar Tracking System. Appl. Sci. 2018, 8, 36. [Google Scholar] [CrossRef]
- Yang, Z.; Li, X.; Yao, X.; Sun, J.; Shan, T. Gaussian Process Gaussian Mixture PHD Filter for 3D Multiple Extended Target Tracking. Remote Sens. 2023, 15, 3224. [Google Scholar] [CrossRef]
- Li, G.; Li, G.; He, Y. Distributed GGIW-CPHD-Based Extended Target Tracking Over a Sensor Network. IEEE Signal Process. Lett. 2022, 29, 842–846. [Google Scholar] [CrossRef]
- Saucan, A.A.; Varshney, P.K. Distributed Cross-Entropy δ-GLMB Filter for Multi-Sensor Multi-Target Tracking. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1559–1566. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, W.; Wang, S.; Gao, S. Large-Batch and Multi-Structure Group Targets Tracking Based on Serial GLMB. In Proceedings of the 2021 International Conference on Control, Automation and Information Sciences (ICCAIS), Xi’an, China, 14–17 October 2021; pp. 949–954. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, Q.; Song, B.; Zhao, M.; Xia, Z. Student-t Mixture GLMB Filter with Heavy-tailed Noises. In Proceedings of the 2022 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 25–27 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Aguilar, C.; Ortner, M.; Zerubia, J. Adaptive Birth for the GLMB Filter for Object Tracking in Satellite Videos. In Proceedings of the 2022 IEEE 32nd International Workshop on Machine Learning for Signal Processing (MLSP), Xi’an, China, 22–25 August 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, H.; Li, G.; Li, W. Vardiational Bayesian Hybrid Multi-Bernoulli and CPHD Filters for Superpositional Sensors. Electronics 2023, 12, 2083. [Google Scholar] [CrossRef]
- Kim, S.Y.; Kang, C.H.; Park, C.G. SMC-CPHD Filter with Adaptive Survival Probability for Multiple Frequency Tracking. Appl. Sci. 2022, 12, 1369. [Google Scholar] [CrossRef]
- Li, Y.; Wang, B. Multi-Extended Target Tracking Algorithm Based on VBEM-CPHD. Int. J. Pattern Recognit. Artif. Intell. 2022, 36, 2250026. [Google Scholar] [CrossRef]
- Wang, L.; Chen, G.; Chen, G. Gaussian Mixture Cardinalized Probability Hypothesis Density(GM-CPHD): A Distributed Filter Based on the Intersection of Parallel Inverse Covariances. Sensors 2023, 23, 2921. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Chen, G. An Efficient Implementation Method for Distributed Fusion in Sensor Networks Based on CPHD Filters. Sensors 2024, 24, 117. [Google Scholar] [CrossRef] [PubMed]
- Tao, S.; Ming, X.; Jia, B. Distributed estimation in general directed sensor networks based on batch covariance intersection. In Proceedings of the American Control Conference, Boston, MA, USA, 6–8 July 2016. [Google Scholar] [CrossRef]
- Noack, B.; Sijs, J.; Hanebeck, U.D. Inverse Covariance Intersection: New Insights and Properties. In Proceedings of the International Conference on Information Fusion, Xi’an, China, 10–13 July 2017. [Google Scholar] [CrossRef]
- Jin, Y.; Li, J. Time-space domain assignment for generalized covariance intersection fusion with labeled multitarget densities. Digit. Signal Process. 2022, 132, 103786. [Google Scholar] [CrossRef]
- Ajgl, J.; Straka, O. Covariance Intersection fusion with elementwise partial knowledge of correlation. Automatica 2022, 139, 110168. [Google Scholar] [CrossRef]
- Wang, M.; Liu, Q. A robust cooperative localization algorithm based on covariance intersection method for multirobot systems. PeerJ Comput. Sci. 2023, 9, e1373. [Google Scholar] [CrossRef] [PubMed]
- García-Fernándezngel, F.; Maskell, S. Continuous-Discrete Multiple Target Filtering: PMBM, PHD and CPHD Filter Implementations. IEEE Trans. Signal Process. 2020, 68, 1300–1314. [Google Scholar] [CrossRef]
- Li, G.; Wei, P.; Battistelli, G.; Chisci, L.; Gao, L.; Farina, A. Distributed joint target detection, tracking and classification via Bernoulli filter. IET Radar Sonar Navig. 2022, 16, 1000–1013. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. Analytic Implementatons of the Cardinalized Probability Hypothesis Density Filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Yang, W.; Fu, Y.W.; Li, X. Joint detection, tracking and classification of multiple maneuvering targets based on the linear Gaussian jump Markov probability hypothesis density filter. Opt. Eng. 2013, 52, 3106. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Wang, J.; Lv, H.; Yang, Z. A Target Corner Detection Algorithm Based on the Fusion of FAST and Harris. Math. Probl. Eng. 2022, 2022, 4611508. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Wang, J.; Lv, H. An optical flow estimation method based on multiscale anisotropic convolution. Appl. Intel. 2023, 54, 398–413. [Google Scholar] [CrossRef]
- Shi, S.; Du, P.; Zhang, J.; Cao, C. Multitarget joint detection, tracking and classification using radar information. Chin. J. Radio Sci. 2016, 31, 10–18. [Google Scholar] [CrossRef]
- Kim, D.; Hwang, I. Gaussian Mixture PHD Filter with State-Dependent Jump Markov System Models. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2020. [Google Scholar] [CrossRef]
- Sun, Y.C.; Kim, D.; Hwang, I. Multiple-model Gaussian mixture probability hypothesis density filter based on jump Markov system with state-dependent probabilities. IET Radar Sonar Navig. 2022, 16, 1881–1894. [Google Scholar] [CrossRef]
- Li, W.; Jia, Y. Gaussian mixture PHD filter for jump Markov models based on best-fitting Gaussian approximation. Signal Process. Off. Publ. Eur. Assoc. Signal Process. 2011, 4, 91–105. [Google Scholar] [CrossRef]
- Da, K.; Li, T.; Zhu, Y.; Fu, Q. Gaussian Mixture Particle Jump-Markov-CPHD Fusion for Multitarget Tracking Using Sensors With Limited Views. IEEE Trans. Signal Inf. Process. Over Netw. 2020, 6, 605–616. [Google Scholar] [CrossRef]
- Wang, X.; Tao, G.; Zou, X.; Hong, L. Inverse Covariance Intersection Fusion Steady-state Kalman Filter for Uncertain Systems with Missing Measurements and Linearly Correlated White Noises. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 3209–3213. [Google Scholar] [CrossRef]
- Wu, K.; Xu, K.; Gao, Y.; Huo, Y. Sequential Fast Covariance Intersection Fusion Kalman Filter for Multi-Sensor Systems with Random One-step Measurement Delays and Missing Measurements. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 6291–6296. [Google Scholar] [CrossRef]
- Yu, K.; Chen, L.; Wu, K.; Gao, Y. Sequential Inverse Covariance Intersection Fusion Kalman Filter for Networked Systems with Multiplicative Noises. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 3083–3088. [Google Scholar] [CrossRef]
- Hu, H.; Wang, X.; Tao, G. Inverse Covariance Intersection Fusion Steady-state Kalman filter for Uncertain Systems with Multiplicative Noises, Missing Measurements and Linearly Correlated White Noises. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; pp. 3174–3178. [Google Scholar] [CrossRef]
- Park, W.J.; Chan, G.P. Distributed GM-CPHD filter based on Generalized Inverse Covariance Intersection. IEEE Access 2021, 9, 94078–94086. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target | Initial State | Appearing Frame | Disappearing Frame |
|---|---|---|---|
| 1 | [1000; −10; 1300; −10; wturn/8] | 1 | truth.K + 1 |
| 2 | [−1500; 11; 250; 10; −wturn/6] | 10 | truth.K + 1 |
| 3 | [−250; 20; 1000; 3; −wturn/3] | 10 | truth.K + 1 |
| 4 | [−1200; 12; 250; 10; −wturn/3] | 10 | truth.K + 1 |
| 5 | [−1300; 40; 200; 0; −wturn/2] | 10 | 66 |
| 6 | [250; 11; 750; 5; −wturn/6] | 20 | 80 |
| 7 | [−250; −12; 800; −12; wturn/2] | 40 | truth.K + 1 |
| 8 | [1000; 0; 1500; −10; wturn/4] | 40 | truth.K + 1 |
| 9 | [220; −10; 750; 10; −wturn/4] | 40 | 80 |
| 10 | [800; −20; 1200; 0; wturn/4] | 60 | truth.K + 1 |
| 11 | [250; −10; 650; −15; wturn/8] | 60 | truth.K + 1 |
| 12 | [−1400; 20; 330; 0; −wturn/5] | 60 | 150 |
| 13 | [800; −30; 1500; 0; wturn/3] | 60 | truth.K + 1 |
| 14 | [300; −10; 550; −15; wturn/8] | 80 | truth.K + 1 |
| 15 | [−200; 10; 800; 3; −wturn/3] | 120 | 200 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Wei, Y.; Qin, X.; Guo, P. The GM-JMNS-CPHD Filtering Algorithm for Nonlinear Systems Based on a Generalized Covariance Intersection. Sensors 2024, 24, 1508. https://doi.org/10.3390/s24051508
Xu Z, Wei Y, Qin X, Guo P. The GM-JMNS-CPHD Filtering Algorithm for Nonlinear Systems Based on a Generalized Covariance Intersection. Sensors. 2024; 24(5):1508. https://doi.org/10.3390/s24051508
Chicago/Turabian StyleXu, Zhixuan, Yu Wei, Xiaobao Qin, and Pengfei Guo. 2024. "The GM-JMNS-CPHD Filtering Algorithm for Nonlinear Systems Based on a Generalized Covariance Intersection" Sensors 24, no. 5: 1508. https://doi.org/10.3390/s24051508
APA StyleXu, Z., Wei, Y., Qin, X., & Guo, P. (2024). The GM-JMNS-CPHD Filtering Algorithm for Nonlinear Systems Based on a Generalized Covariance Intersection. Sensors, 24(5), 1508. https://doi.org/10.3390/s24051508