
Data-Driven Virtual Sensing for Electrochemical Sensors

 ,
,  ,
,  ,
,  and
and
Abstract
1. Introduction
- In the data-driven approach, time series data of input and output variables are gathered through direct measurements. These data are then utilized to establish a mathematical approximation of the relationship between the measured variables and the sensors’ output [2,3,4]. Machine learning is used in data science to facilitate the identification of patterns and automate the process of data analysis, offering a compelling approach to tackling virtual sensing challenges by leveraging historical data to predict and estimate unmeasured variables due to its capacity to discern complex patterns and relationships within data [5,6,7,8]. Through various algorithms like neural networks, support vector machines, and ensemble methods, machine learning effectively reconstructs and forecasts missing or inaccessible data points [9]. Moreover, machine learning models continuously learn and adapt, refining their predictions over time as they acquire new information. The integration of machine learning into virtual sensing not only enables the estimation of unmeasured variables, but also empowers decision-making processes in various sectors, such as healthcare, manufacturing, and environmental monitoring, resulting in a significant transformation in how we address sensing limitations [10,11,12];
- In the deterministic approach, the physical or chemical connections between input and output variables are leveraged to calculate the unmeasured variable through a virtual sensor [13]. Usually, virtual sensing based on the deterministic approach is performed using methodologies based on the Kalman filter due to its ability to combine available data with system dynamics to estimate unmeasured variables [14,15,16,17]. Its widespread application across various sectors such as autonomous systems, finance, and environmental monitoring highlights its significance in addressing complex problems where direct measurements are unattainable. The Kalman filter stands as a cornerstone for enabling virtual sensing, aiding informed decision making and system optimization.
2. Materials and Methods
2.1. Hardware Setup and Measurements
- Steel sensor chamber: the chamber hosts three MOX sensors separated from the external environment, except for an inlet and an outlet path for the passage of volatile compounds with internal dimensions of 11 cm × 6.5 cm × 1.3 cm.
- Fluid dynamic circuit: The circuit serves for the distribution of volatile compounds; it is formed by a pump (Knf, model: NMP05B, Nano Sensor Systems Srl, Reggio Emilia, Italy), polyurethane pipes, a solenoid valve, and a metal cylinder which contains activated carbon for filtering any type of odors present outside of the instrument. The pump flow is set by a needle valve positioned at the chamber inlet.
- Electronics control system: The system records the resistance variations of the sensors, controls their heating, maintains their operating temperature, and facilitates the real-time transmission of the recorded data to the dedicated Web App through an internet connection. This capability enables the storage and analysis of the collected data in the cloud, making S3 an IoT device.
2.2. Data-Driven Models for Virtual Sensing
2.2.1. ARX models
- is the order of the autoregressive part;
- is the order of the exogenous part;
- is the delay between the input and output;
- and are the model coefficients (of the autoregressive and exogenous parts, respectively) to be estimated starting from data.
- is the matrix of all the model input (including both autoregressive and exogenous parts);
- is the vector of the measured output of the system.
2.2.2. MLP Artificial Neural Networks
- is the input vector;
- is the weight matrix connecting the input layer to the hidden layer;
- is the bias vector for the hidden layer;
- is the non-linear activation function for the hidden layer.
3. Results
3.1. Available Data
3.2. Test Definitions
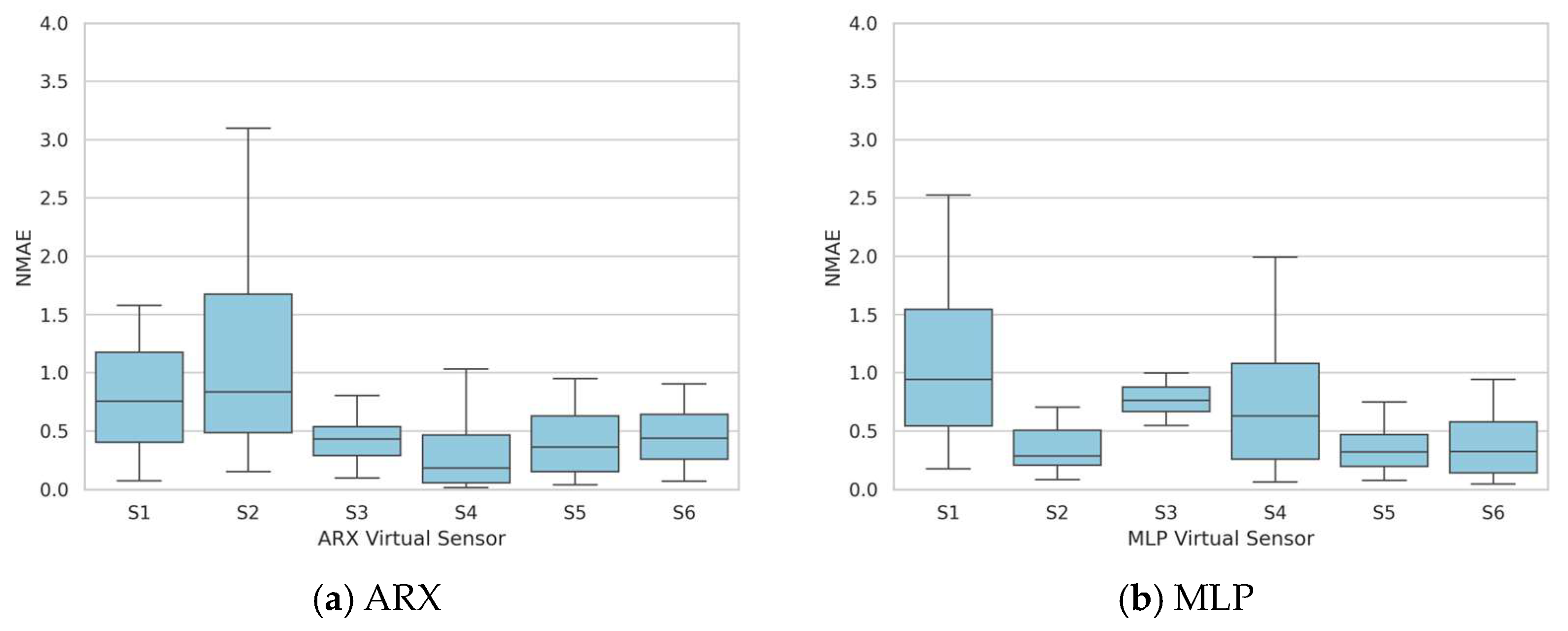
- Virtual substitution: In this case, a study was performed to select which sensors could be replaced by virtual sensors, using only the measurements produced by the remaining set of sensors. The objective was to reduce the quantity of physical sensors integrated into a device, along with the corresponding costs, by virtualizing sensors with redundant measurements.
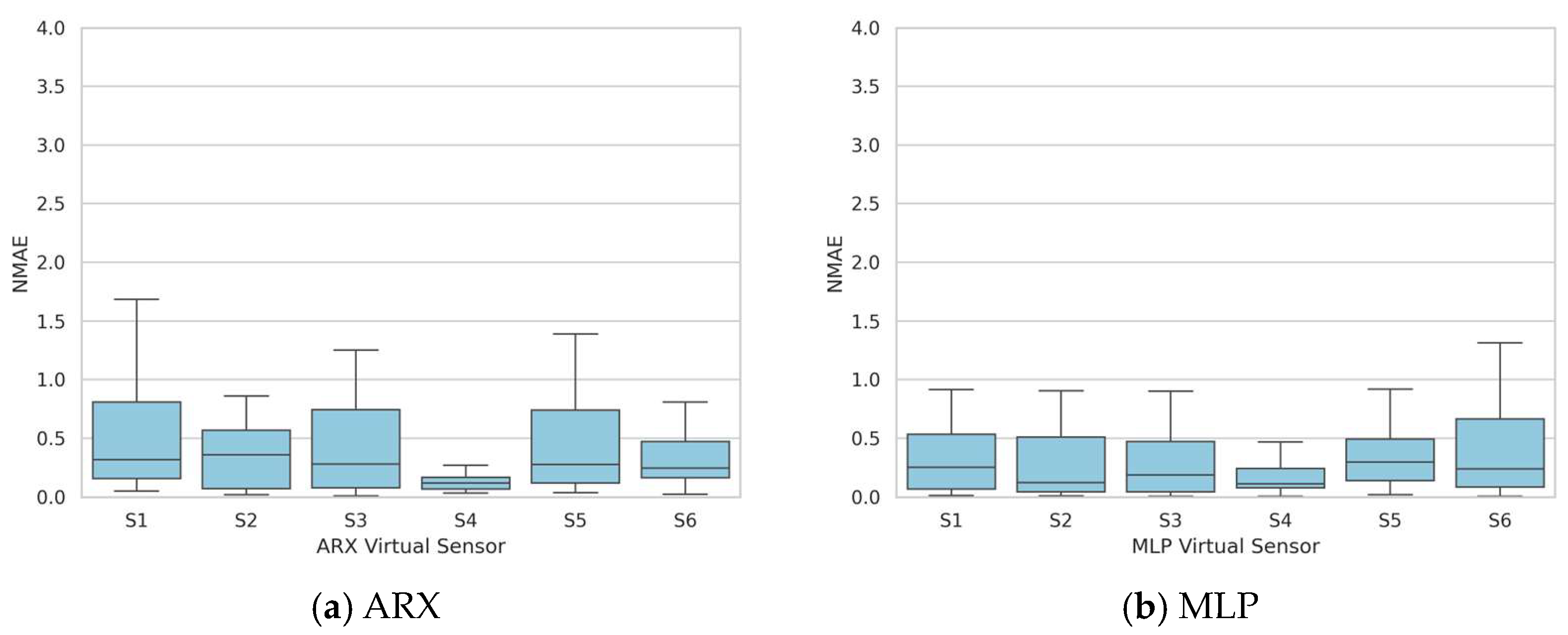
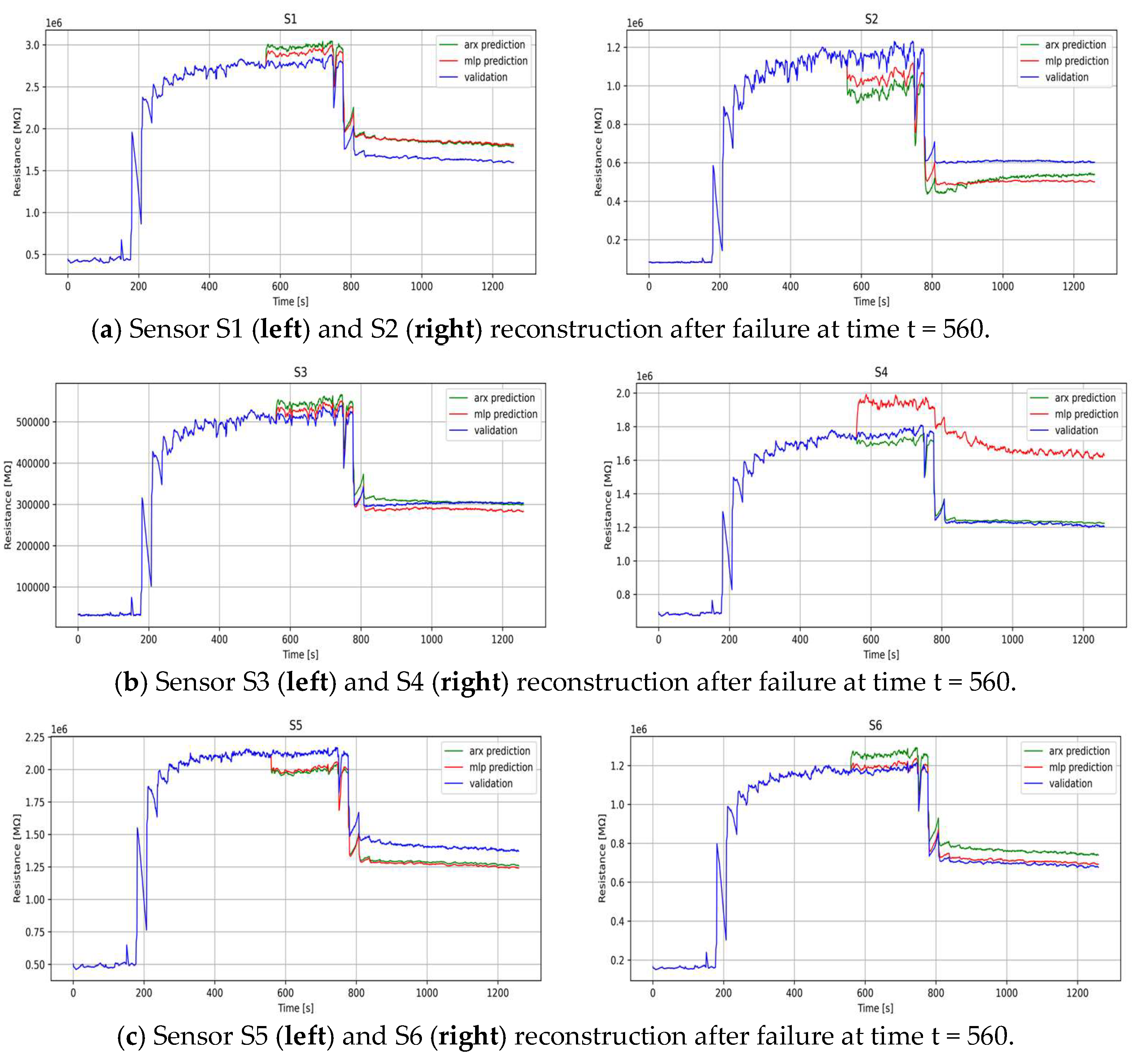
- Virtual switch: In this case, a simulated failure was introduced during the sensor’s operational life, potentially leading to disruptions in sensor readings and the subsequent loss of crucial information. Subsequently, a virtual sensor was employed to reconstruct the unrecorded data from that moment onward.
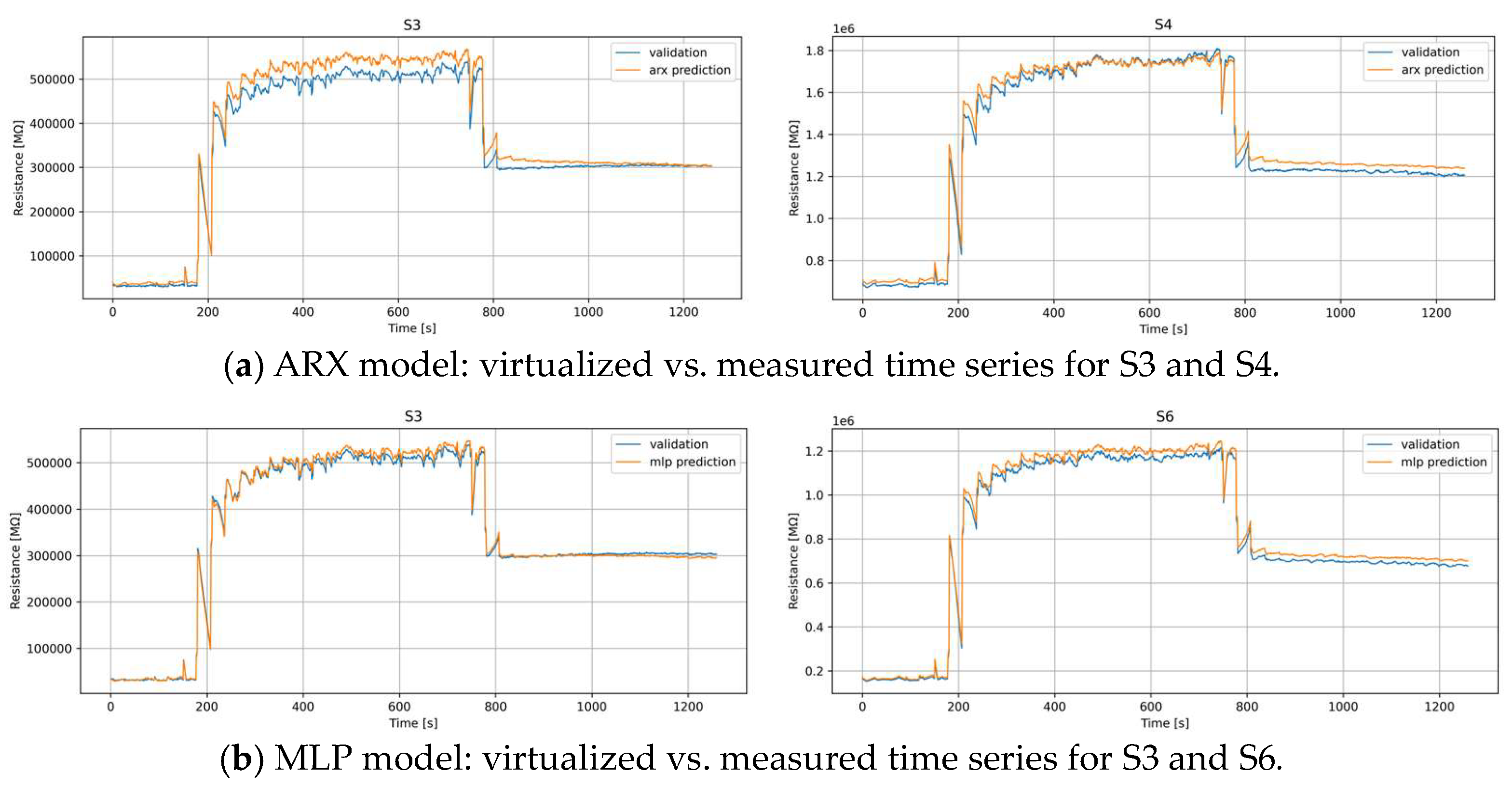
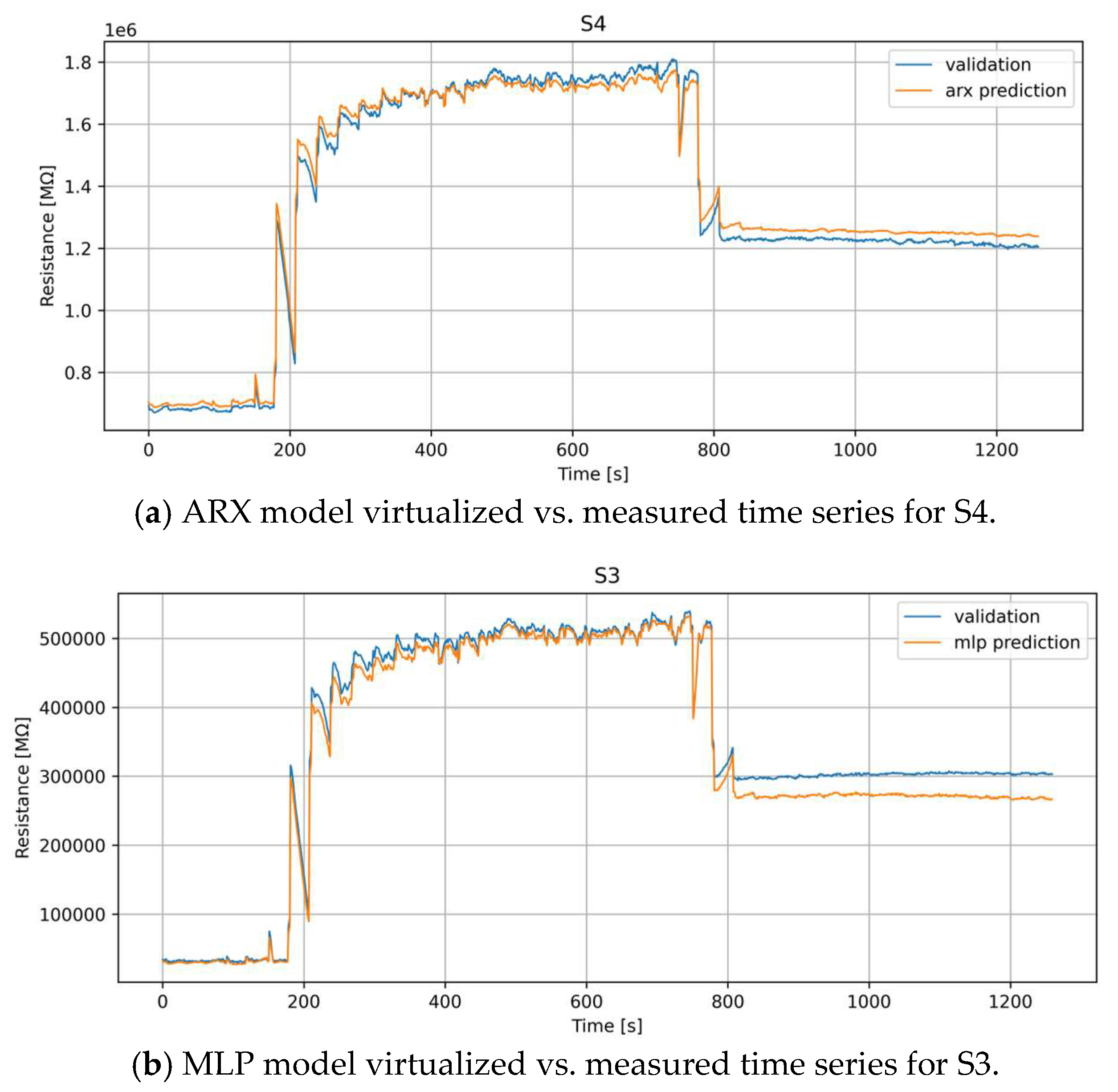
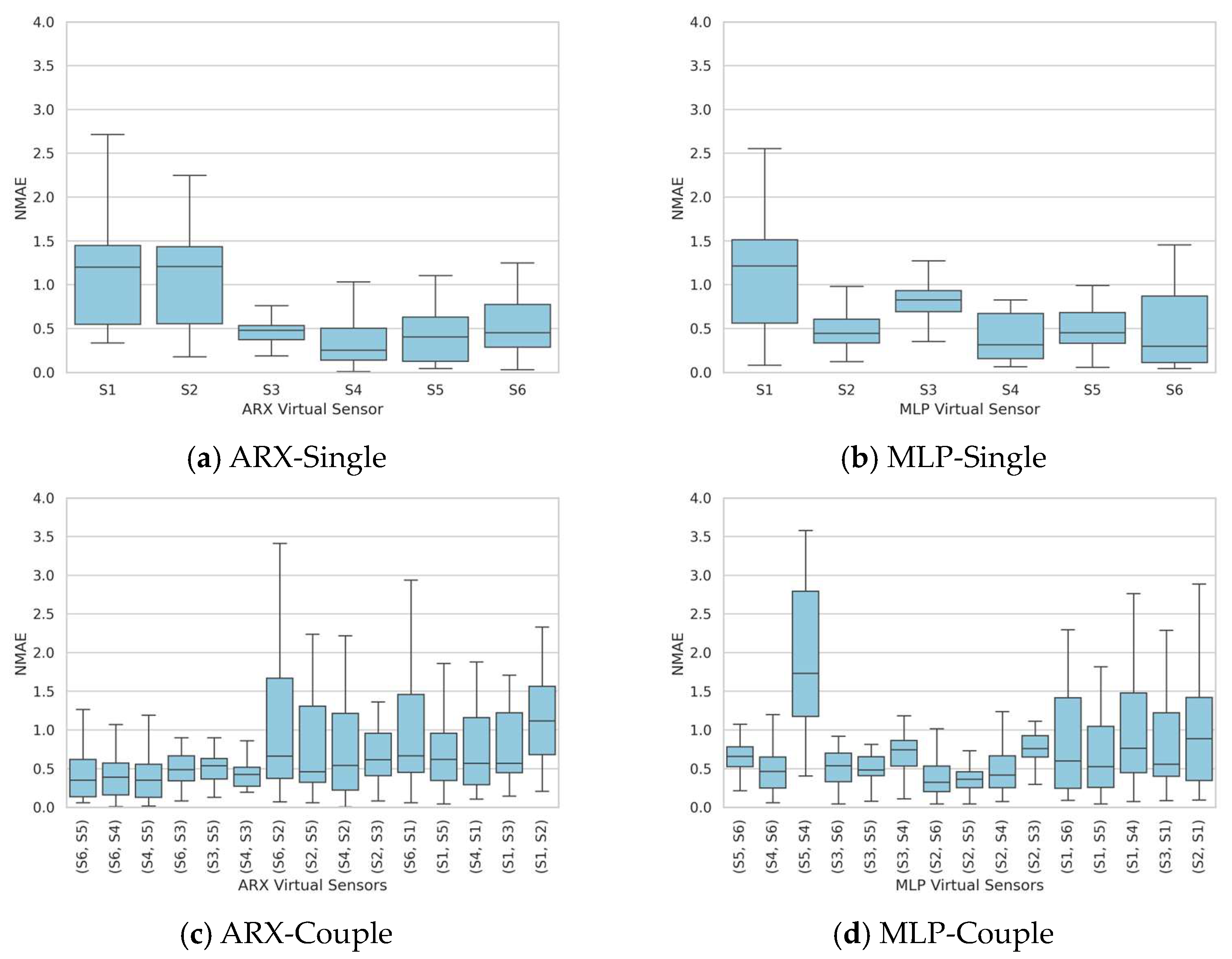
3.3. Test Case 1: Virtual Substitution
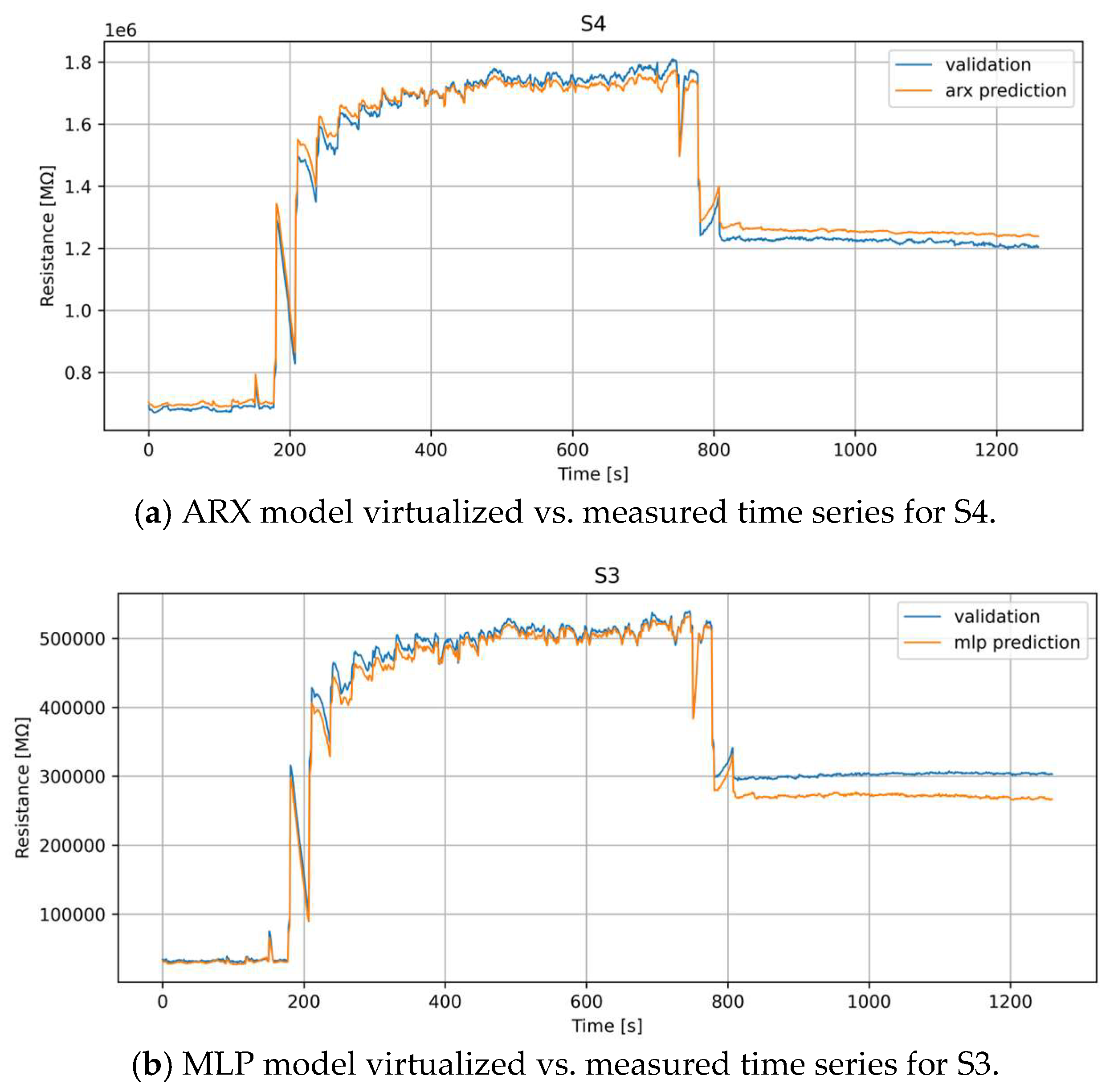
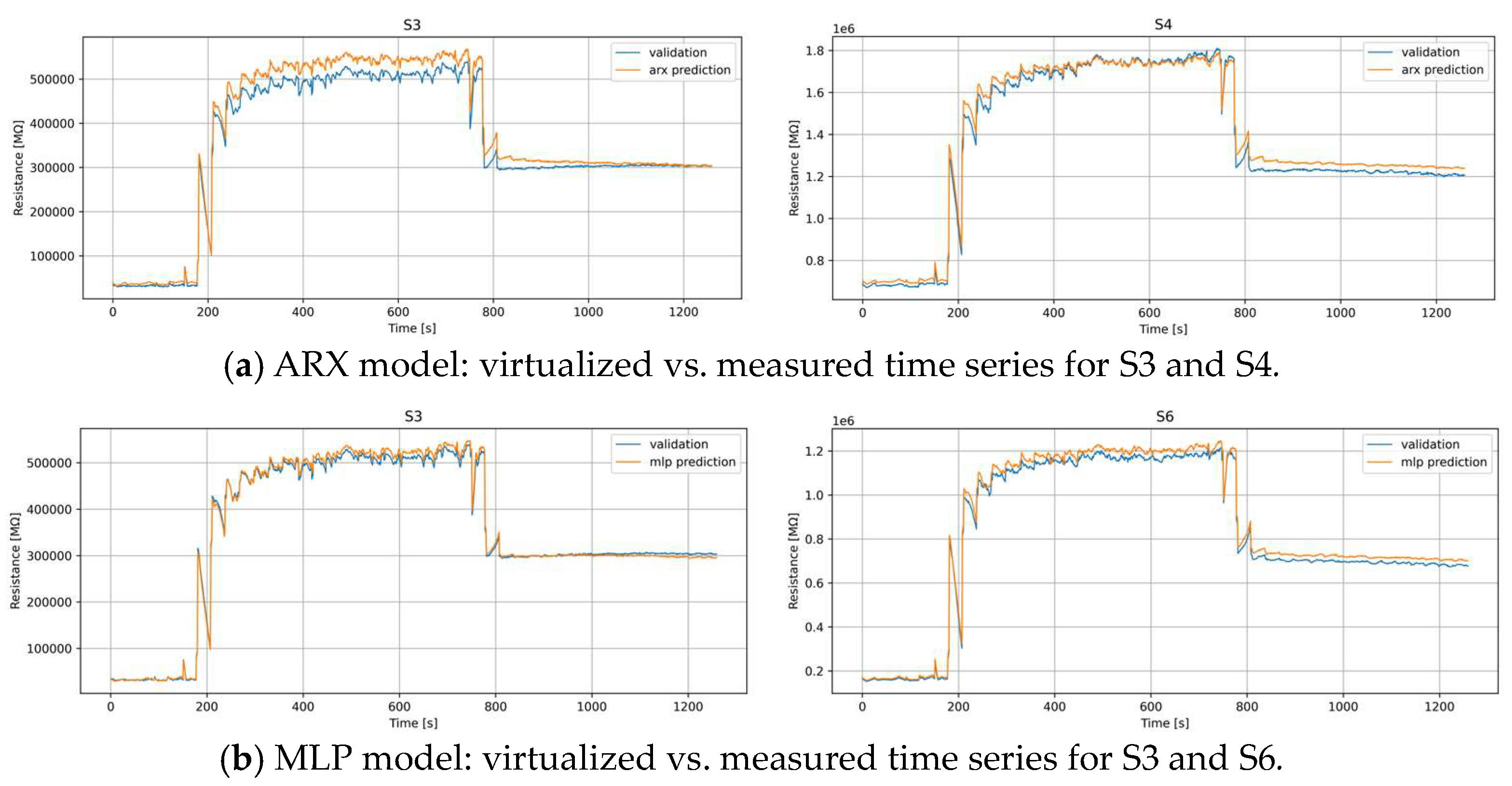
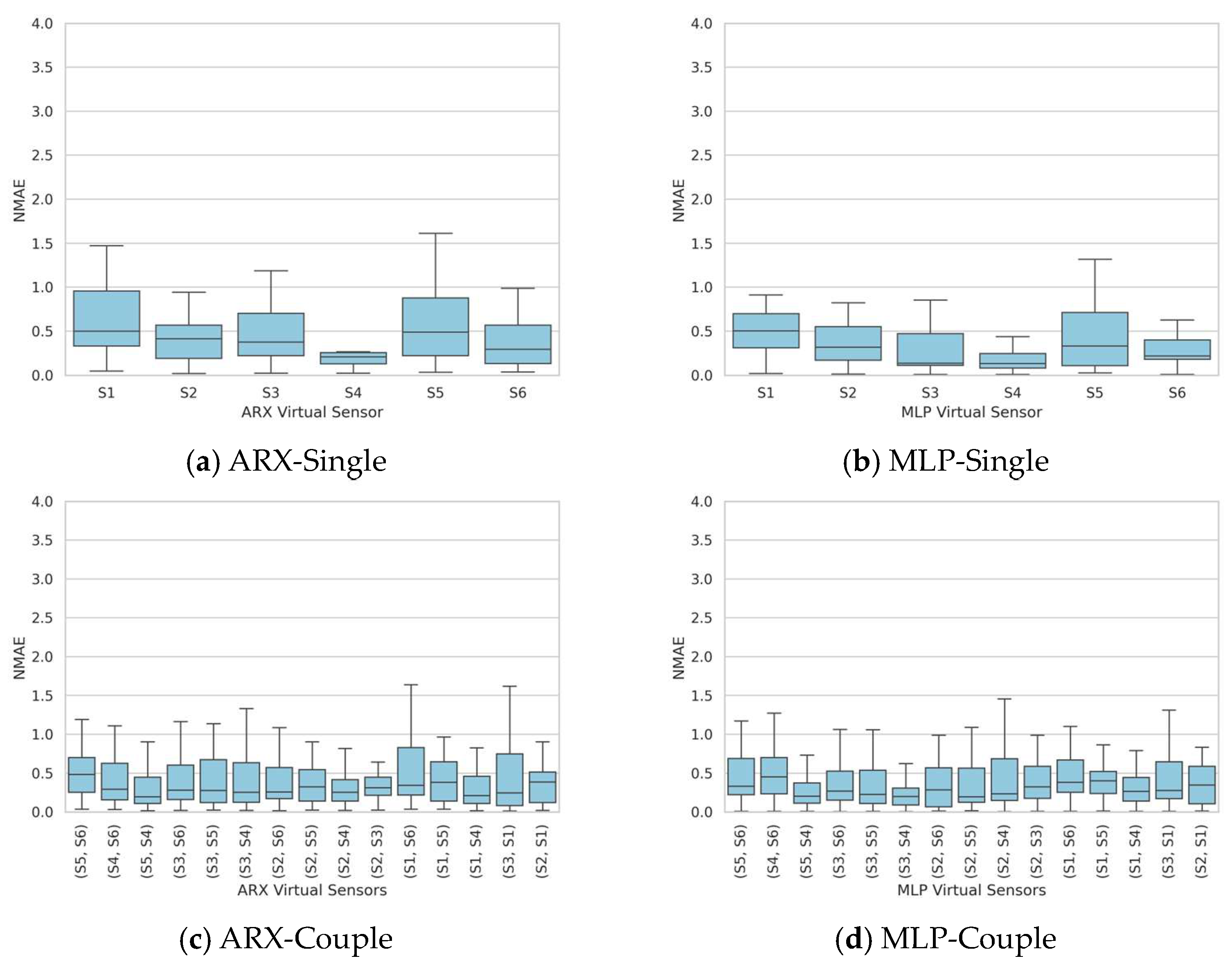
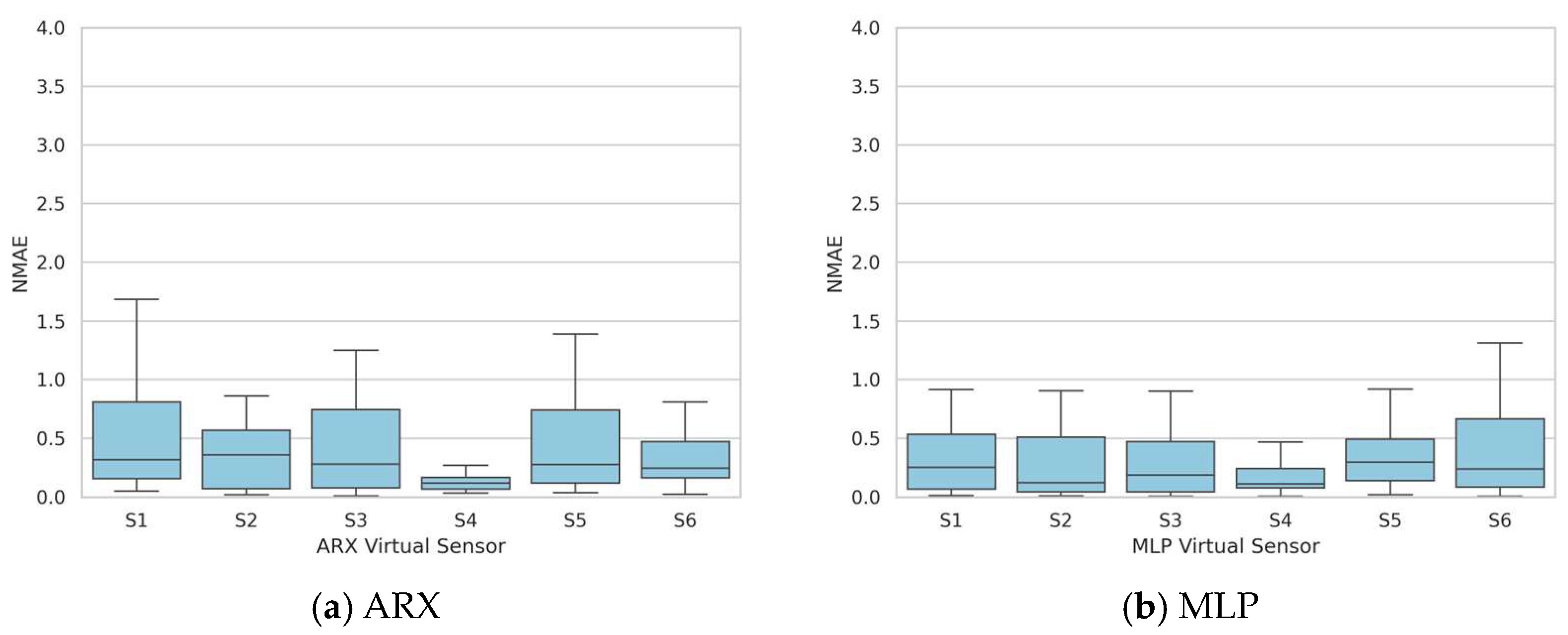
3.4. Test Case 2: Sensor Data Recustruction in the Case of Failure
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fortuna, L.; Graziani, S.; Rizzo, A.; Xibilia, M.G. Soft Sensors for Monitoring and Control of Industrial Processes; Advances in Industrial Control; Springer: London, UK, 2007; ISBN 978-1-84628-479-3. [Google Scholar]
- Shao, W.; Yao, L.; Ge, Z.; Song, Z. Parallel Computing and SGD-Based DPMM For Soft Sensor Development With Large-Scale Semisupervised Data. IEEE Trans. Ind. Electron. 2019, 66, 6362–6373. [Google Scholar] [CrossRef]
- He, Y.-L.; Hua, Q.; Zhu, Q.-X.; Lu, S. Enhanced Virtual Sample Generation Based on Manifold Features: Applications to Developing Soft Sensor Using Small Data. ISA Trans. 2022, 126, 398–406. [Google Scholar] [CrossRef]
- Qin, S.J. Process Data Analytics in the Era of Big Data. AIChE J. 2014, 60, 3092–3100. [Google Scholar] [CrossRef]
- Pastre, G.G.; Balbinot, A.; Pedroni, R. Virtual Temperature Sensor Using Support Vector Machines for Autonomous Uninterrupted Automotive HVAC Systems Control. Int. J. Refrig. 2022, 144, 128–135. [Google Scholar] [CrossRef]
- Karri, V.; Ho, T.; Madsen, O. Artificial Neural Networks and Neuro-Fuzzy Inference Systems as Virtual Sensors for Hydrogen Safety Prediction. Int. J. Hydrogen Energy 2008, 33, 2857–2867. [Google Scholar] [CrossRef]
- Yap, W.K.; Ho, T.; Karri, V. Exhaust Emissions Control and Engine Parameters Optimization Using Artificial Neural Network Virtual Sensors for a Hydrogen-Powered Vehicle. Int. J. Hydrogen Energy 2012, 37, 8704–8715. [Google Scholar] [CrossRef]
- Carnevale, C.; Turrini, E.; Zeziola, R.; De Angelis, E.; Volta, M. A Wavenet-Based Virtual Sensor for Pm10 Monitoring. Electronics 2021, 10, 2111. [Google Scholar] [CrossRef]
- AlHaddad, U.; Basuhail, A.; Khemakhem, M.; Eassa, F.E.; Jambi, K. Towards Sustainable Energy Grids: A Machine Learning-Based Ensemble Methods Approach for Outages Estimation in Extreme Weather Events. Sustainability 2023, 15, 12622. [Google Scholar] [CrossRef]
- Martin, D.; Kühl, N.; Satzger, G. Virtual Sensors. Bus. Inf. Syst. Eng. 2021, 63, 315–323. [Google Scholar] [CrossRef]
- Masti, D.; Bernardini, D.; Bemporad, A. A Machine-Learning Approach to Synthesize Virtual Sensors for Parameter-Varying Systems. Eur. J. Control 2021, 61, 40–49. [Google Scholar] [CrossRef]
- Zaidan, M.A.; Hossein Motlagh, N.; Fung, P.L.; Lu, D.; Timonen, H.; Kuula, J.; Niemi, J.V.; Tarkoma, S.; Petaja, T.; Kulmala, M.; et al. Intelligent Calibration and Virtual Sensing for Integrated Low-Cost Air Quality Sensors. IEEE Sensors J. 2020, 20, 13638–13652. [Google Scholar] [CrossRef]
- Liu, L.; Kuo, S.M.; Zhou, M. Virtual Sensing Techniques and Their Applications. In Proceedings of the 2009 International Conference on Networking, Sensing and Control, Okayama, Japan, 26–29 March 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 31–36. [Google Scholar]
- Ercan, T.; Sedehi, O.; Katafygiotis, L.S.; Papadimitriou, C. Information Theoretic-Based Optimal Sensor Placement for Virtual Sensing Using Augmented Kalman Filtering. Mech. Syst. Signal Process. 2023, 188, 110031. [Google Scholar] [CrossRef]
- Deibe Díaz, Á.; Antón Nacimiento, J.A.; Cardenal, J.; Peña, F.L. A Time-Varying Kalman Filter for Low-Acceleration Attitude Estimation. Measurement 2023, 213, 112729. [Google Scholar] [CrossRef]
- Misgeld, B.J.E.; Bergmann, L.; Szilasi, B.; Leonhardt, S.; Greven, D. Virtual Torque Sensor for Electrical Bicycles. IFAC-PapersOnLine 2020, 53, 8903–8908. [Google Scholar] [CrossRef]
- Petersen, C.D.; Fraanje, R.; Cazzolato, B.S.; Zander, A.C.; Hansen, C.H. A Kalman Filter Approach to Virtual Sensing for Active Noise Control. Mech. Syst. Signal Process. 2008, 22, 490–508. [Google Scholar] [CrossRef]
- Karlström, A.; Hill, J.; Johansson, L. Data-Driven Soft Sensors in Refining Processes—Pulp Property Estimation Using ARX—Models. BioResources 2023, 18, 8163–8186. [Google Scholar] [CrossRef]
- Aldoseri, A.; Al-Khalifa, K.N.; Hamouda, A.M. Re-Thinking Data Strategy and Integration for Artificial Intelligence: Concepts, Opportunities, and Challenges. Appl. Sci. 2023, 13, 7082. [Google Scholar] [CrossRef]
- Amkor, A.; El Barbri, N. Artificial Intelligence Methods for Classification and Prediction of Potatoes Harvested from Fertilized Soil Based on a Sensor Array Response. Sens. Actuators A Phys. 2023, 349, 114106. [Google Scholar] [CrossRef]
- Taheri, M.; Deen, I.A.; Packirisamy, M.; Deen, M.J. Metal Oxide -Based Electrical/Electrochemical Sensors for Health Monitoring Systems. TrAC Trends Anal. Chem. 2024, 171, 117509. [Google Scholar] [CrossRef]
- NASYS—Nano Sensor Systems—Smell the Future. Available online: https://www.nasys.it/ (accessed on 26 January 2024).
- Núñez-Carmona, E.; Bertuna, A.; Abbatangelo, M.; Sberveglieri, V.; Comini, E.; Sberveglieri, G. BC-MOS: The Novel Bacterial Cellulose Based MOS Gas Sensors. Mater. Lett. 2019, 237, 69–71. [Google Scholar] [CrossRef]
- Genzardi, D.; Greco, G.; Núñez-Carmona, E.; Sberveglieri, V. Real Time Monitoring of Wine Vinegar Supply Chain through MOX Sensors. Sensors 2022, 22, 6247. [Google Scholar] [CrossRef] [PubMed]
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Prentice Hall Information and System Sciences Series; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1999; ISBN 978-0-13-656695-3. [Google Scholar]
- Haykin, S.S. Neural Networks and Learning Machines, 3rd ed.; Prentice Hall: New York, NY, USA, 2009; ISBN 978-0-13-147139-9. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | MAE ARX | MAE MLP |
|---|---|---|
| S1 | 0.096 | 0.063 |
| S2 | 0.153 | 0.155 |
| S3 | 0.054 | 0.046 |
| S4 | 0.019 | 0.173 |
| S5 | 0.075 | 0.070 |
| S6 | 0.078 | 0.049 |
| Sensors | Average MAE ARX | Average MAE MLP |
|---|---|---|
| S1, S2 | 0.146 | 0.099 |
| S1, S3 | 0.071 | 0.057 |
| S1, S4 | 0.069 | 0.103 |
| S1, S5 | 0.046 | 0.055 |
| S1, S6 | 0.096 | 0.101 |
| S2, S3 | 0.109 | 0.156 |
| S2, S4 | 0.085 | 0.151 |
| S2, S5 | 0.068 | 0.064 |
| S2, S6 | 0.068 | 0.063 |
| S3, S4 | 0.038 | 0.109 |
| S3, S5 | 0.055 | 0.047 |
| S3, S6 | 0.060 | 0.024 |
| S4, S5 | 0.046 | 0.110 |
| S4, S6 | 0.049 | 0.091 |
| S5, S6 | 0.044 | 0.045 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sangiorgi, L.; Sberveglieri, V.; Carnevale, C.; De Nardi, S.; Nunez-Carmona, E.; Raccagni, S. Data-Driven Virtual Sensing for Electrochemical Sensors. Sensors 2024, 24, 1396. https://doi.org/10.3390/s24051396
Sangiorgi L, Sberveglieri V, Carnevale C, De Nardi S, Nunez-Carmona E, Raccagni S. Data-Driven Virtual Sensing for Electrochemical Sensors. Sensors. 2024; 24(5):1396. https://doi.org/10.3390/s24051396
Chicago/Turabian StyleSangiorgi, Lucia, Veronica Sberveglieri, Claudio Carnevale, Sabrina De Nardi, Estefanía Nunez-Carmona, and Sara Raccagni. 2024. "Data-Driven Virtual Sensing for Electrochemical Sensors" Sensors 24, no. 5: 1396. https://doi.org/10.3390/s24051396
APA StyleSangiorgi, L., Sberveglieri, V., Carnevale, C., De Nardi, S., Nunez-Carmona, E., & Raccagni, S. (2024). Data-Driven Virtual Sensing for Electrochemical Sensors. Sensors, 24(5), 1396. https://doi.org/10.3390/s24051396