


Displacement Estimation via 3D-Printed RFID Sensors for Structural Health Monitoring: Leveraging Machine Learning and Photoluminescence to Overcome Data Gaps



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Review of RFID Positioning Systems
3. Materials and Methods
3.1. Test Procedure
3.2. Test Setup
3.3. Measurements
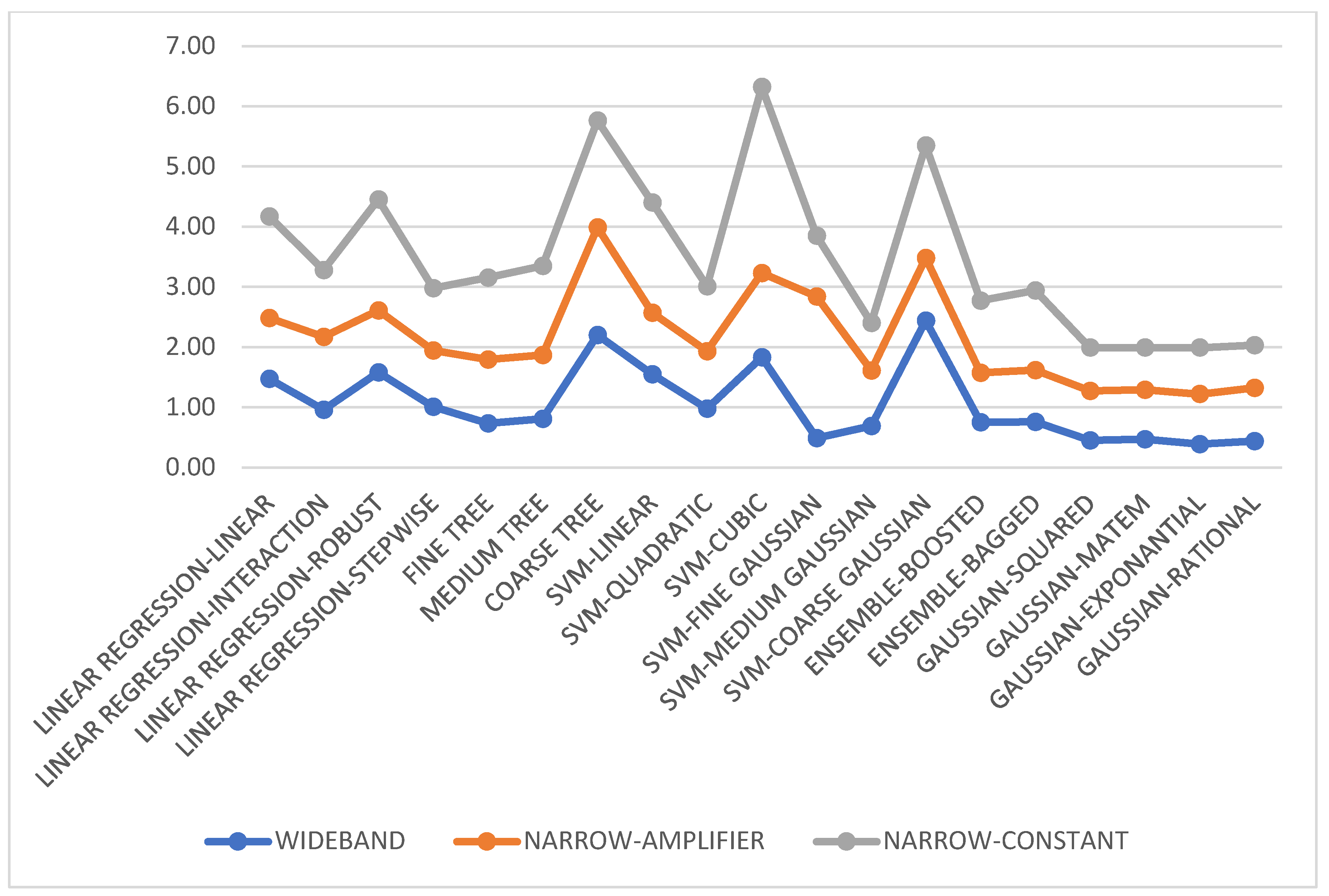
- Test-1—wideband: The RFID reader is set to a wide frequency range (902.750–927.250 MHz). The transmitter and receiver attenuators/amplifiers are adjusted automatically.
- Test-2—narrow-amplifier: The RFID reader is set to function in a narrow band (921 MHz), with the transmitter and receiver attenuators/amplifiers again left on the automatic mode.
- Test-3—narrow-constant: The RFID reader employs a narrowband signal with constant attenuator/amplifier levels (0 dBm) at both the transmitter and receiver.
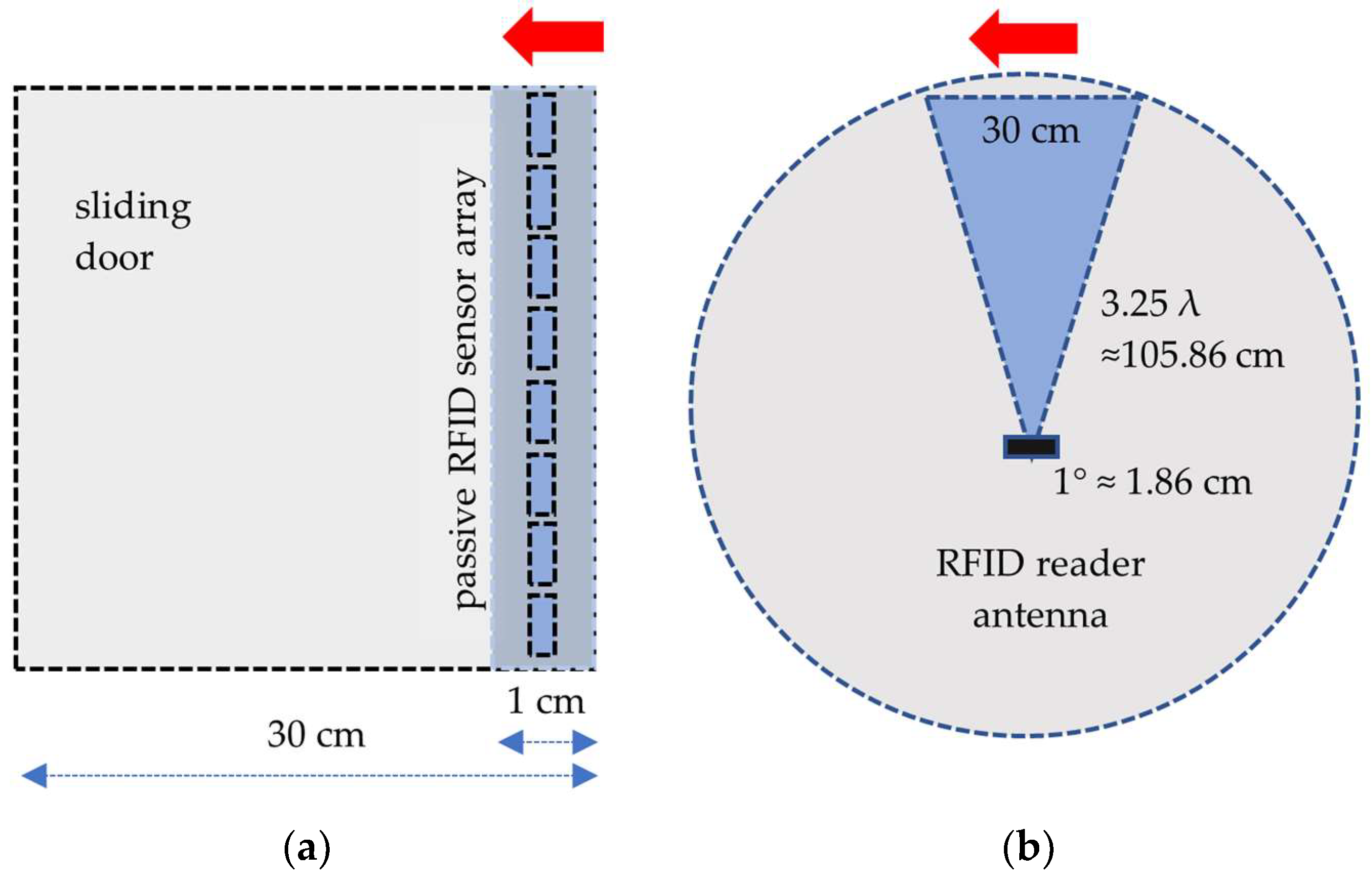
- angle change of 0.538°/cm for each measurement step ( cm for 921 MHz, ≈ 0.538°)
- measurement distance 3.25 λ
- number of array elements
- array element spacing
- number of incoming signals
- number of data samples each 10 s
- system frequency 902–927 MHz for Test-1, 921 MHz for Test-2 and Test-3
- system bandwidth 15 MHz for Test-1, 200 kHz for Test-2 and Test-3
- RFID reader receiver attenuation: variable for Test-1 and Test-2, 0 dB for Test-3 (sensitivity mode is OFF)
- RFID reader transmitter attenuation: variable for Test-1 and Test-2, 0 dB for Test-3 (AGC is OFF).
3.4. Machine Learning Approach
3.5. Data Collection and Preparation
- sensor labels
- sensor RSSI mean values
- sensor I values
- sensor Q values
- ML model ()
- known azimuth angles (target outputs)
- predicted azimuth angles
3.6. Enhancing the Model Performance
- -
- Utilize more data: If there are no missing data, use a more extensive dataset rather than being limited to a smaller one.
- -
- Address outliers and missing data: identify outliers and missing data, treating them as important components of your dataset [33].
- -
- Feature engineering: employ feature engineering techniques using the existing dataset to create more informative features.
- -
- Feature selection: carefully select features that have the most significant impact or contribution to the variable being predicted.
- -
- Model selection: choose the appropriate model based on the nature of the data and the specific problem being addressed.
- -
- Parameter adjustment: fine-tune the model parameters to optimize performance.
- -
- Cross-validation: implement cross-validation techniques to assess the effectiveness of the model and to prevent overfitting.
3.7. Test Results for Ten Displacement Steps
3.8. Test Results for Eighty Displacement Steps
3.9. Challenges and Novel Solutions for Missing Data in the RFID Systems
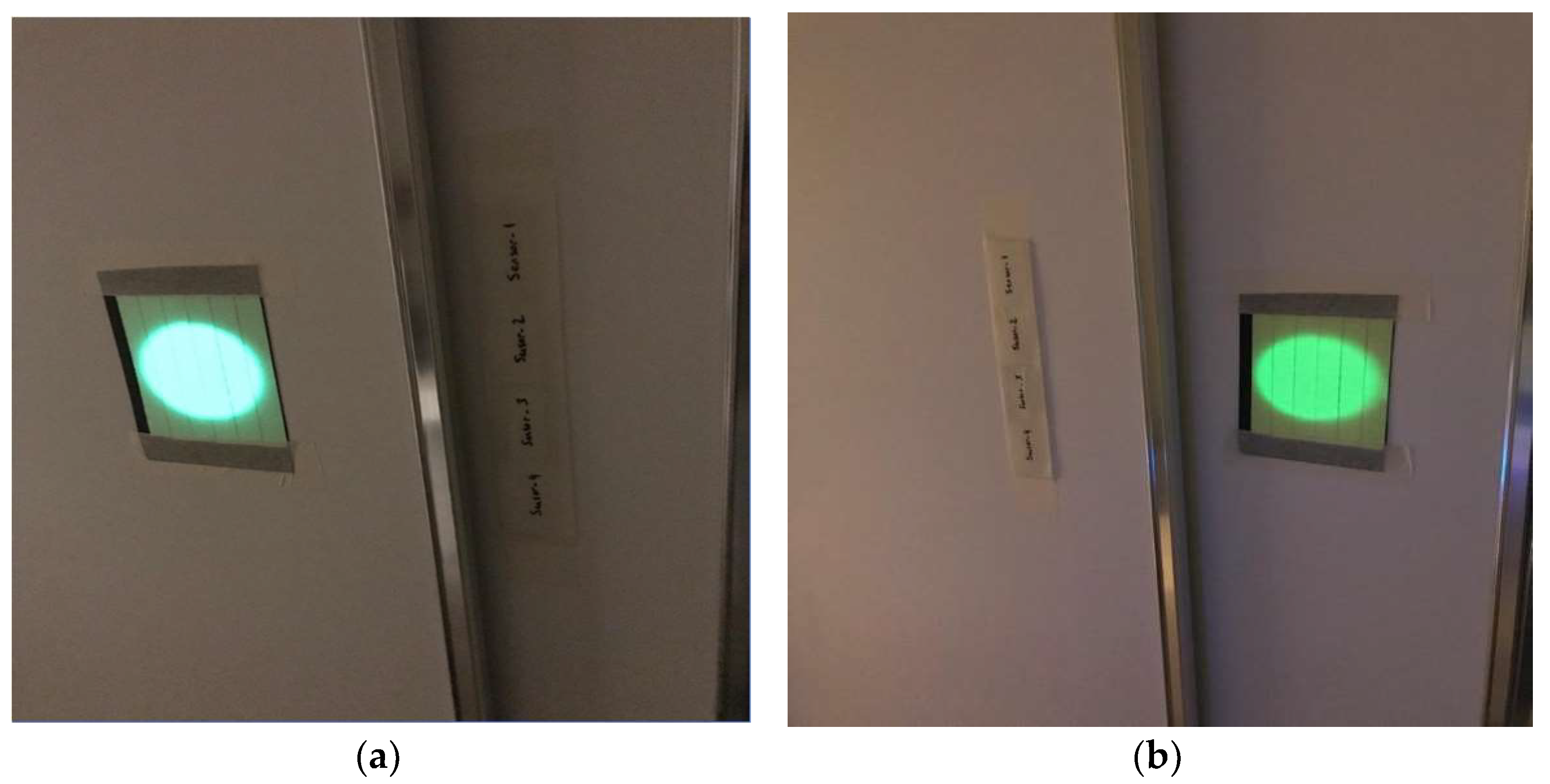
3.10. Test Procedure with New Encapsulation Method
- When the entire surface is stimulated with light, the RFID signal level is attenuated in the dark due to an increase in the phosphorescent material’s dielectric constant.
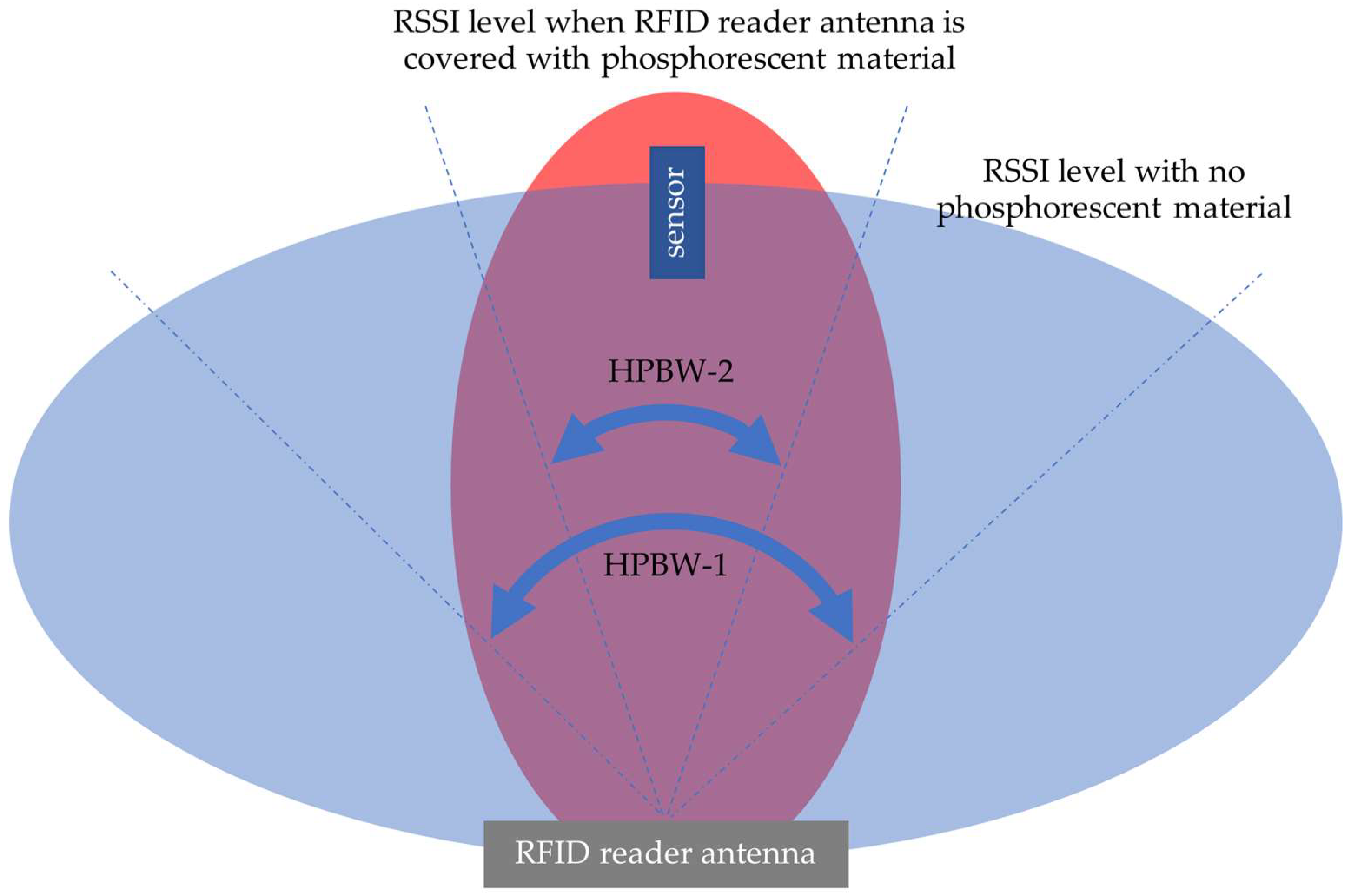
- When the surface is exposed to a light array and specific boundary conditions are met, there is an observed increase in the RFID signal level. This enhancement in signal strength can be attributed to two key factors: changes in the dielectric constant of the phosphorescent material and the occurrence of Mie scattering during its relaxation time in the dark. These phenomena facilitate the harvesting of energy by the RFID sensor, which in turn leads to enhanced sensitivity and accuracy.
- When the whole surface is stimulated with light, there is no change in the RFID signal level. In this scenario, the phosphorescent material acts as a reflector due to the increase in its dielectric constant.
- When the surface is stimulated with a light array, under specific boundary conditions, an increase in the RFID signal level is observed. This is again due to changes in the phosphorescent material’s dielectric constant and Mie scattering, with energy harvesting by the RFID sensor leading to improved performance. In these tests, an increase of approximately 2 dB in RSSI level is observed.
4. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Smarsly, K.; Dragos, K.; Wiggenbrock, J. Machine learning techniques for structural health monitoring. In Proceedings of the 8th European Workshop on Structural Health Monitoring (EWSHM 2016), Bilbao, Spain, 5–8 July 2016; pp. 5–8. [Google Scholar]
- Yuan, F.-G.; Zargar, S.A.; Chen, Q.; Wang, S. Machine learning for structural health monitoring: Challenges and opportunities. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2020, Online, 27 April–9 May 2020; International Society for Optics and Photonics: Bellingham, WA, USA, 2020; p. 1137903. [Google Scholar]
- Li, X.; Zhang, Y.; Marsic, I.; Sarcevic, A.; Burd, R.S. Deep Learning for RFID-Based Activity Recognition. In Proceedings of the International Conference on Embedded Networked Sensor Systems, Stanford, CA, USA, 14–16 November 2016; pp. 164–175. [Google Scholar] [CrossRef]
- Aroca, R.V.; Hernandes, A.C.; Magalhães, D.V.; Becker, M.; Vaz, C.M.P.; Calbo, A.G. Calibration of passive UHF RFID tags using neural networks to measure soil moisture. J. Sens. 2018, 2018, 3436503. [Google Scholar] [CrossRef]
- Zhang, J.; Tian, G.Y. UHF RFID tag antenna-based sensing for corrosion detection & characterization using principal component analysis. IEEE Trans. Antennas Propag. 2016, 64, 4405–4414. [Google Scholar]
- Zhang, J.; Tian, G.Y.; Zhao, A.B. Passive RFID sensor systems for crack detection & characterization. NDT E Int. 2017, 86, 89–99. [Google Scholar]
- Duan, K.-K.; Cao, S.-Y. Emerging RFID technology in structural engineering—A review. Structures 2020, 28, 2404–2414. [Google Scholar] [CrossRef]
- Kumar, V.; Dhull, S.K. Mathematical modelling of different doa estimation algorithms. J. Crit. Rev. 2020, 7, 4571–4579. [Google Scholar]
- Zhuang, Z.; Xu, L.; Li, J.; Hu, J.; Sun, L.; Shu, F.; Wang, J. Machine-learning-based high-resolution DOA measurement and robust directional modulation for hybrid analog-digital massive MIMO transceiver. Sci. China Inf. Sci. 2020, 63, 180302. [Google Scholar] [CrossRef]
- You, M.-Y.; Lu, A.-N.; Ye, Y.-X.; Huang, K.; Jiang, B. A Review on Machine Learning-Based Radio Direction Finding. Math. Probl. Eng. 2020, 2020, 8345413. [Google Scholar] [CrossRef]
- Erricolo, D.; Chen, P.-Y.; Rozhkova, A.; Torabi, E.; Bagci, H.; Shamim, A.; Zhang, X. Machine learning in electromagnetics: A review and some perspectives for future research. In Proceedings of the 2019 International Conference on Electromagnetics in Advanced Applications (ICEAA), Granada, Spain, 9–13 September 2019; pp. 1377–1380. [Google Scholar]
- Ye, L.; Mi, W.; Wang, D. Navigation studies based on the ubiquitous positioning technologies. In Proceedings of the Second International Conference on Space Information Technology, Wuhan, China, 10–11 November 2007; International Society for Optics and Photonics: Bellingham, WA, USA, 2007; p. 679545. [Google Scholar]
- Wang, C.; Shi, Z.; Wu, F. Intelligent RFID indoor localization system using a Gaussian filtering based extreme learning machine. Symmetry 2017, 9, 30. [Google Scholar] [CrossRef]
- Cheng, S.; Wang, S.; Guan, W.; Xu, H.; Li, P. 3DLRA: An RFID 3D Indoor Localization Method Based on Deep Learning. Sensors 2020, 20, 2731. [Google Scholar] [CrossRef]
- Shangguan, L.; Yang, Z.; Liu, A.X.; Zhou, Z.; Liu, Y. STPP: Spatial-temporal phase profiling-based method for relative RFID tag localization. IEEE/ACM Trans. Netw. 2016, 25, 596–609. [Google Scholar] [CrossRef]
- Shen, L.; Zhang, Q.; Pang, J.; Xu, H.; Li, P. PRDL: Relative localization method of RFID tags via phase and RSSI based on deep learning. IEEE Access 2019, 7, 20249–20261. [Google Scholar] [CrossRef]
- Wang, G.; Qian, C.; Shangguan, L.; Ding, H.; Han, J.; Yang, N.; Xi, W.; Zhao, J. HMRL: Relative localization of RFID tags with static devices. In Proceedings of the 2017 14th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), IEEE, San Diego, CA, USA, 12–14 June 2017; pp. 1–9. [Google Scholar]
- Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID indoor positioning algorithm based on Bayesian probability and K-nearest neighbor. Sensors 2017, 17, 1806. [Google Scholar] [CrossRef] [PubMed]
- Feng, Z.; Cao, Y.; Yan, J. A Received Signal Strength Based Indoor Localization Algorithm Using ELM Technique and Ridge Regression. In Proceedings of the 2019 IEEE 2nd International Conference on Electronic Information and Communication Technology (ICEICT), IEEE, Harbin, China, 20–22 January 2019; pp. 599–603. [Google Scholar]
- El-Absi, M.; Zheng, F.; Abuelhaija, A.; Abbas, A.-h.; Solbach, K.; Kaiser, T. Indoor Large-Scale MIMO-Based RSSI Localization with Low-Complexity RFID Infrastructure. Sensors 2020, 20, 3933. [Google Scholar] [CrossRef] [PubMed]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, 2003, (PerCom 2003), IEEE, Fort Worth, TX, USA, 23–26 March 2003; pp. 407–415. [Google Scholar]
- Zhao, Y.; Liu, Y.; Ni, L.M. VIRE: Active RFID-based localization using virtual reference elimination. In Proceedings of the 2007 International Conference on Parallel Processing (ICPP 2007), IEEE, Xi’an, China, 10–14 September 2007; p. 56. [Google Scholar]
- Zhang, Y.; Hou, Q.S.; Luo, Y. Research on the Indoor Location Algorithm Based on RFID. In Proceedings of the Applied Mechanics and Materials, Changchun, China, 27–29 August 2021; pp. 518–522. [Google Scholar]
- Gharat, V.; Colin, E.; Baudoin, G.; Richard, D. Indoor performance analysis of LF-RFID based positioning system: Comparison with UHF-RFID and UWB. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), IEEE, Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Zou, H.; Xie, L.; Jia, Q.-S.; Wang, H. An integrative weighted path loss and extreme learning machine approach to rfid based indoor positioning. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, IEEE, Montbeliard, France, 28–31 October 2013; pp. 1–5. [Google Scholar]
- Ma, H.; Wang, Y.; Wang, K. Automatic detection of false positive RFID readings using machine learning algorithms. Expert Syst. Appl. 2018, 91, 442–451. [Google Scholar] [CrossRef]
- Alfian, G.; Syafrudin, M.; Yoon, B.; Rhee, J. False positive RFID detection using classification models. Appl. Sci. 2019, 9, 1154. [Google Scholar] [CrossRef]
- Barthelme, A.; Utschick, W. A Machine Learning Approach to DoA Estimation and Model Order Selection for Antenna Arrays with Subarray Sampling. arXiv 2020, arXiv:2009.12858. [Google Scholar] [CrossRef]
- Willnecker, F.; Anantavraslip, I.; Bruegge, B. Machine Learning Assisted Position Detection of UHF RFID Tags. In Proceedings of the Smart SysTech 2012; European Conference on Smart Objects, Systems and Technologies, VDE, Erlangen and Nuremburg, Germany, 11–13 June 2013; pp. 1–7. [Google Scholar]
- Pekgor, M.; Arablouei, R.; Nikzad, M.; Masood, S. Displacement Estimation Using 3D-Printed RFID Arrays for Structural Health Monitoring. Sensors 2022, 22, 8811. [Google Scholar] [CrossRef]
- Nikitin, P.V.; Rao, K.S.; Martinez, R.; Lam, S.F. Sensitivity and impedance measurements of UHF RFID chips. IEEE Trans. Microw. Theory Technol. 2009, 57, 1297–1302. [Google Scholar] [CrossRef]
- Didona, D.; Quaglia, F.; Romano, P.; Torre, E. Enhancing performance prediction robustness by combining analytical modeling and machine learning. In Proceedings of the 6th ACM/SPEC International Conference on Performance Engineering, Virtual, 19–23 April 2021; pp. 145–156. [Google Scholar]
- Uddin, M.F.; Lee, J.; Rizvi, S.; Hamada, S. Proposing enhanced feature engineering and a selection model for machine learning processes. Appl. Sci. 2018, 8, 646. [Google Scholar] [CrossRef]
- Engels, J.M.; Diehr, P. Imputation of missing longitudinal data: A comparison of methods. J. Clin. Epidemiol. 2003, 56, 968–976. [Google Scholar] [CrossRef]
- Darcy, P.; Pupunwiwat, P.; Stantic, B. The challenges and issues facing the deployment of RFID technology. In Deploying RFID–Challenges, Solutions and Open Issues; I-Tech Education and Publishing KG: Rijeka, Croatia, 2011; pp. 1–12. [Google Scholar]
- Rao, K.S.; Nikitin, P.V.; Lam, S.F. Impedance matching concepts in RFID transponder design. In Proceedings of the Fourth IEEE Workshop on Automatic Identification Advanced Technologies (AutoID’05), IEEE, Buffalo, NY, USA, 17–18 October 2005; pp. 39–42. [Google Scholar]
- Famitafreshi, G.; Afaqui, M.S.; Melià-Seguí, J. A Comprehensive Review on Energy Harvesting Integration in IoT Systems from MAC Layer Perspective: Challenges and Opportunities. Sensors 2021, 21, 3097. [Google Scholar] [CrossRef]
- Amer, A.A.G.; Sapuan, S.Z.; Nasimuddin, N.; Alphones, A.; Zinal, N.B. A comprehensive review of metasurface structures suitable for RF energy harvesting. IEEE Access 2020, 8, 76433–76452. [Google Scholar] [CrossRef]
- Holloway, C.L.; Kuester, E.F.; Gordon, J.A.; O’Hara, J.; Booth, J.; Smith, D.R. An overview of the theory and applications of metasurfaces: The two-dimensional equivalents of metamaterials. IEEE Antennas Propag. Mag. 2012, 54, 10–35. [Google Scholar] [CrossRef]
- Tong, X.C. Metamaterials Inspired Frequency Selective Surfaces. In Functional Metamaterials and Metadevices; Springer: Berlin/Heidelberg, Germany, 2018; pp. 155–171. [Google Scholar]
- Askari, M.; Hutchins, D.A.; Thomas, P.J.; Astolfi, L.; Watson, R.L.; Abdi, M.; Ricci, M.; Laureti, S.; Nie, L.; Freear, S. Additive manufacturing of metamaterials: A review. Addit. Manuf. 2020, 36, 101562. [Google Scholar] [CrossRef]
- Koohestani, M.; Ghaneizadeh, A. An ultra-thin double-functional metasurface patch antenna for UHF RFID applications. Sci. Rep. 2021, 11, 857. [Google Scholar] [CrossRef]
- Kausar, A. Polyurethane composite foams in high-performance applications: A review. Polym.-Plast. Technol. Eng. 2018, 57, 346–369. [Google Scholar] [CrossRef]
- Yoon, G.; Kim, I.; Rho, J. Challenges in fabrication towards realization of practical metamaterials. Microelectron. Eng. 2016, 163, 7–20. [Google Scholar] [CrossRef]
- Garlick, G.; Gibson, A. Electron traps and dielectric changes in phosphorescent solids. Proc. R. Soc. London. Ser. A Math. Phys. Sci. 1947, 188, 485–509. [Google Scholar]
- Valeur, B.; Berberan-Santos, M.N. A brief history of fluorescence and phosphorescence before the emergence of quantum theory. J. Chem. Educ. 2011, 88, 731–738. [Google Scholar] [CrossRef]
- Ghaneizadeh, A.; Mafinezhad, K.; Joodaki, M. Design and fabrication of a 2D-isotropic flexible ultra-thin metasurface for ambient electromagnetic energy harvesting. AIP Adv. 2019, 9, 025304. [Google Scholar] [CrossRef]
- Mosallaei, H.; Sarabandi, K. Magneto-dielectrics in electromagnetics: Concept and applications. IEEE Trans. Antennas Propag. 2004, 52, 1558–1567. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pekgor, M.; Arablouei, R.; Nikzad, M.; Masood, S. Displacement Estimation via 3D-Printed RFID Sensors for Structural Health Monitoring: Leveraging Machine Learning and Photoluminescence to Overcome Data Gaps. Sensors 2024, 24, 1233. https://doi.org/10.3390/s24041233
Pekgor M, Arablouei R, Nikzad M, Masood S. Displacement Estimation via 3D-Printed RFID Sensors for Structural Health Monitoring: Leveraging Machine Learning and Photoluminescence to Overcome Data Gaps. Sensors. 2024; 24(4):1233. https://doi.org/10.3390/s24041233
Chicago/Turabian StylePekgor, Metin, Reza Arablouei, Mostafa Nikzad, and Syed Masood. 2024. "Displacement Estimation via 3D-Printed RFID Sensors for Structural Health Monitoring: Leveraging Machine Learning and Photoluminescence to Overcome Data Gaps" Sensors 24, no. 4: 1233. https://doi.org/10.3390/s24041233
APA StylePekgor, M., Arablouei, R., Nikzad, M., & Masood, S. (2024). Displacement Estimation via 3D-Printed RFID Sensors for Structural Health Monitoring: Leveraging Machine Learning and Photoluminescence to Overcome Data Gaps. Sensors, 24(4), 1233. https://doi.org/10.3390/s24041233