

Improved A-Star Search Algorithm for Probabilistic Air Pollution Detection Using UAVs


Abstract
1. Introduction
- First, this study presents an improved A-star model that can improve search performance when using a stochastic model to search for air pollution in urban areas. To improve air pollution detection performance, appropriate parameters are introduced and applied to the improved A-star algorithm. In particular, heuristic estimates for targets, weights for obstacles, and weights determined by drone sensors are considered.
- Second, an idea is presented to improve the search performance of a probabilistic model based on Bayes’ theorem. To date, in several studies, a probabilistic search model based on Bayes’ theorem has been presented to improve the performance of drone search. This study can improve the performance of the Bayes’-theorem-based search model.
- Third, ideas on the use of drones to detect air pollution in urban areas are presented. Ideas about various uses of drones have been presented in several studies, which will be discussed in the next section. However, relatively few ideas about exploring air pollution have been discussed. Therefore, because the interest in environmental pollution is increasing, this study can mitigate the environmental problems using UAVs.
2. Related Work
2.1. UAV Navigation-Related Studies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Type | Study |
|---|---|---|
| Flight control | Route planning | [2,11,12,13,14,15] |
| Autonomous flight | [3,16,17,18,19] | |
| Target tracking and judgment | Probabilistic search | [20,21,22,23,24,25,26,27] |
| Artificial intelligence | [28,29,30,31,32] | |
| Collection data | Image | [34,35] |
| Video | [36,37] | |
| Sound | [38,39] | |
| Signal | [40,41] | |
| Smoke | [7,42,43] |
2.2. Probabilistic-Model-Based Search Algorithm
3. Improved A-Star Algorithm
Improved A-Star (A*) Search Algorithm
| Algorithm 1: Improved A-Star Algorithm |
| 1: Initialize P0, H0, O, S0 |
| 2: targetFound=0, round=1 |
| 3: while (targetFound!=1) |
| 4: if(roundLimit!=1) then |
| 5: if(round==1) then |
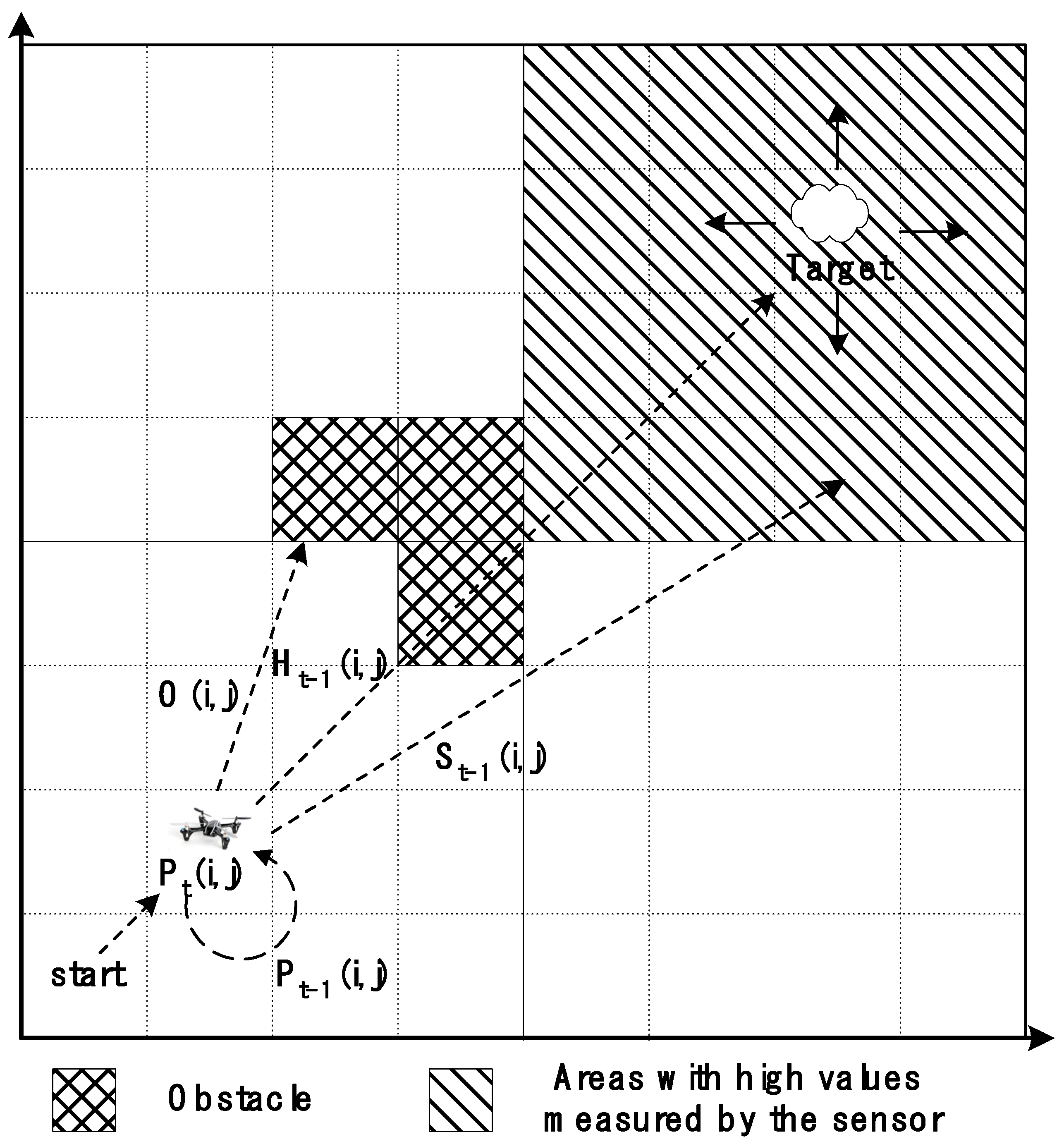
| 6: P1(i,j)=P0(i,j)+H0(i,j)+O(i,j)+S0(i,j) for each c(i,j) |
| 7: else |
| 8: Pt(i,j)=Pt−1(i,j)+Ht−1(i,j)+St−1(i,j) for each c(i,j) |
| 9: end-if |
| 10: Pt(i,j)=Prob(c(i,j)) for each c(i,j) |
| 11: Ht(i,j)=Heu(Ct) |
| 12: St(I,j)=W(MAt) |
| 13: if(Pt>=Th) then |
| 14: targetFound=1 |
| 15: else |
| 16: go to next round |
| 17: end-if |
| 18: round++ |
| 19: end-if |
| 20: end-while |
4. Simulation
4.1. Simulation Environment
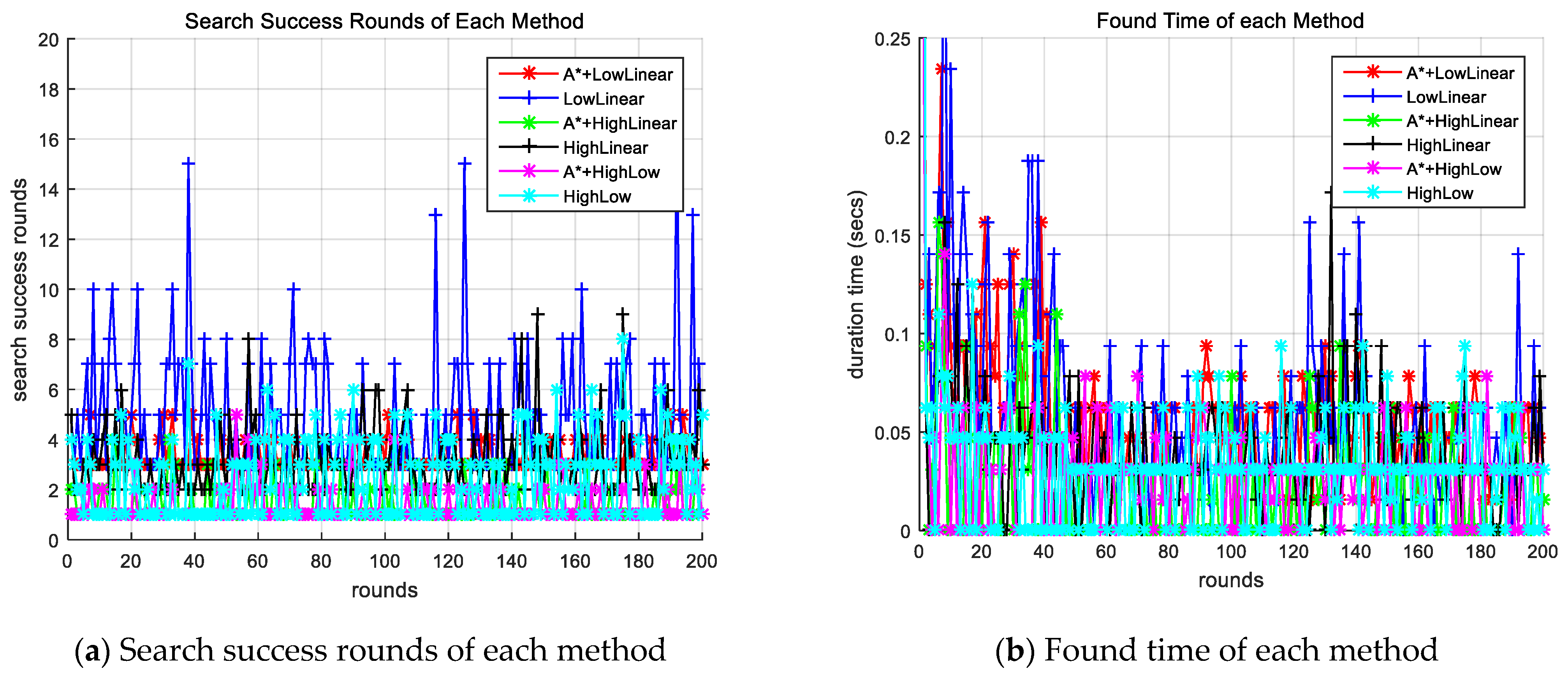
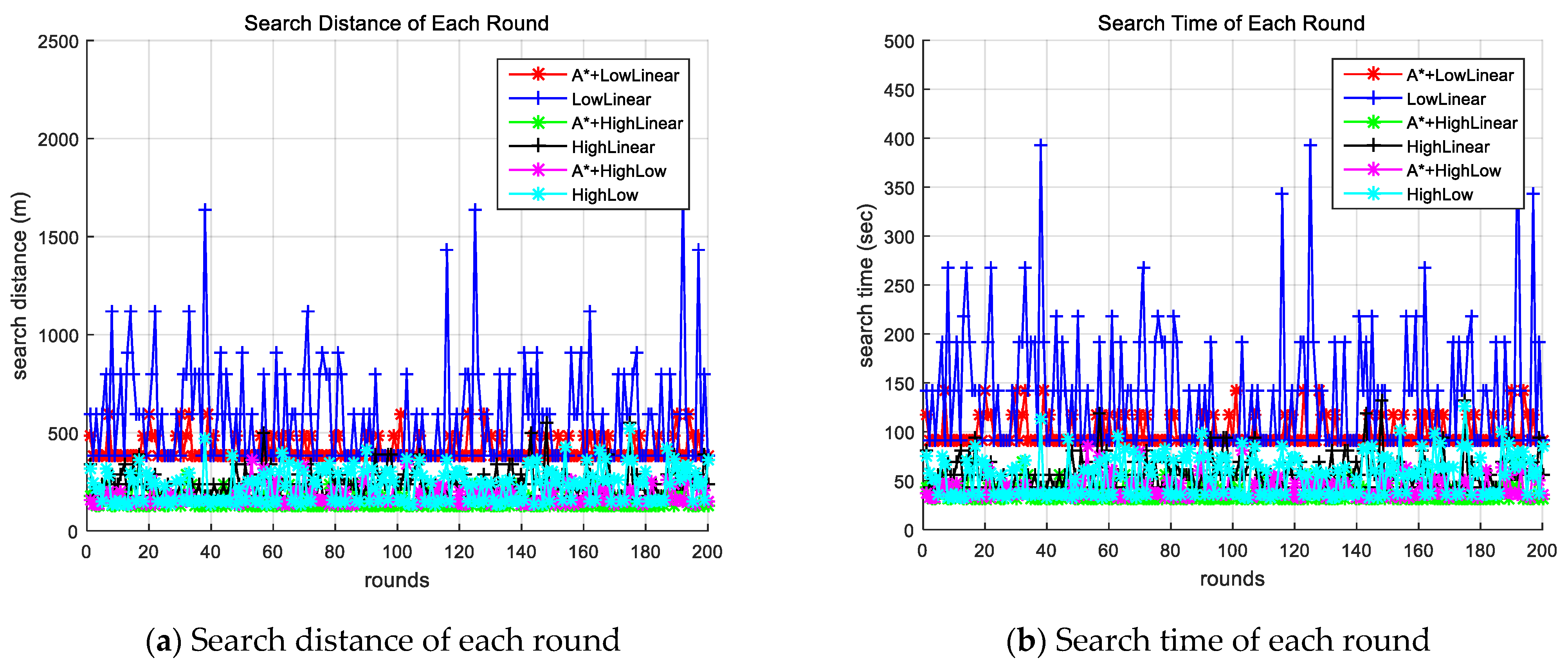
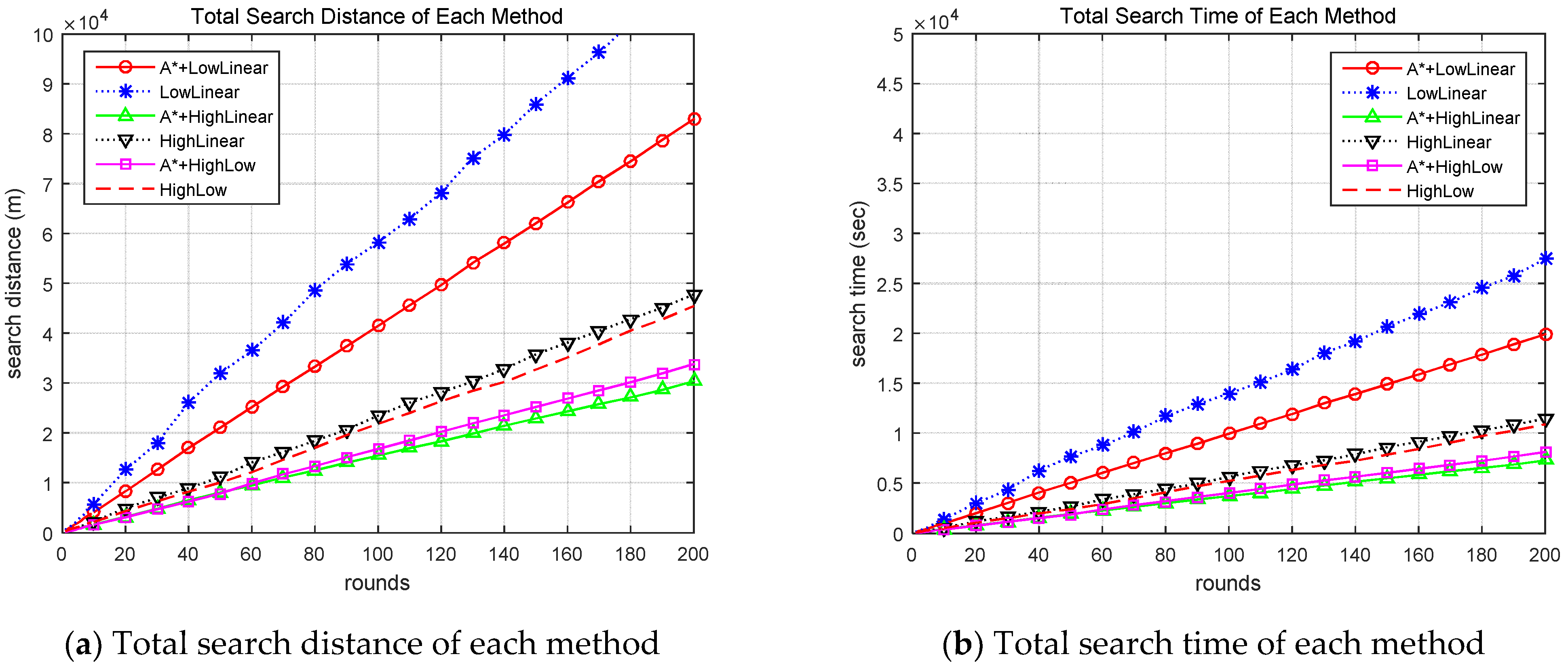
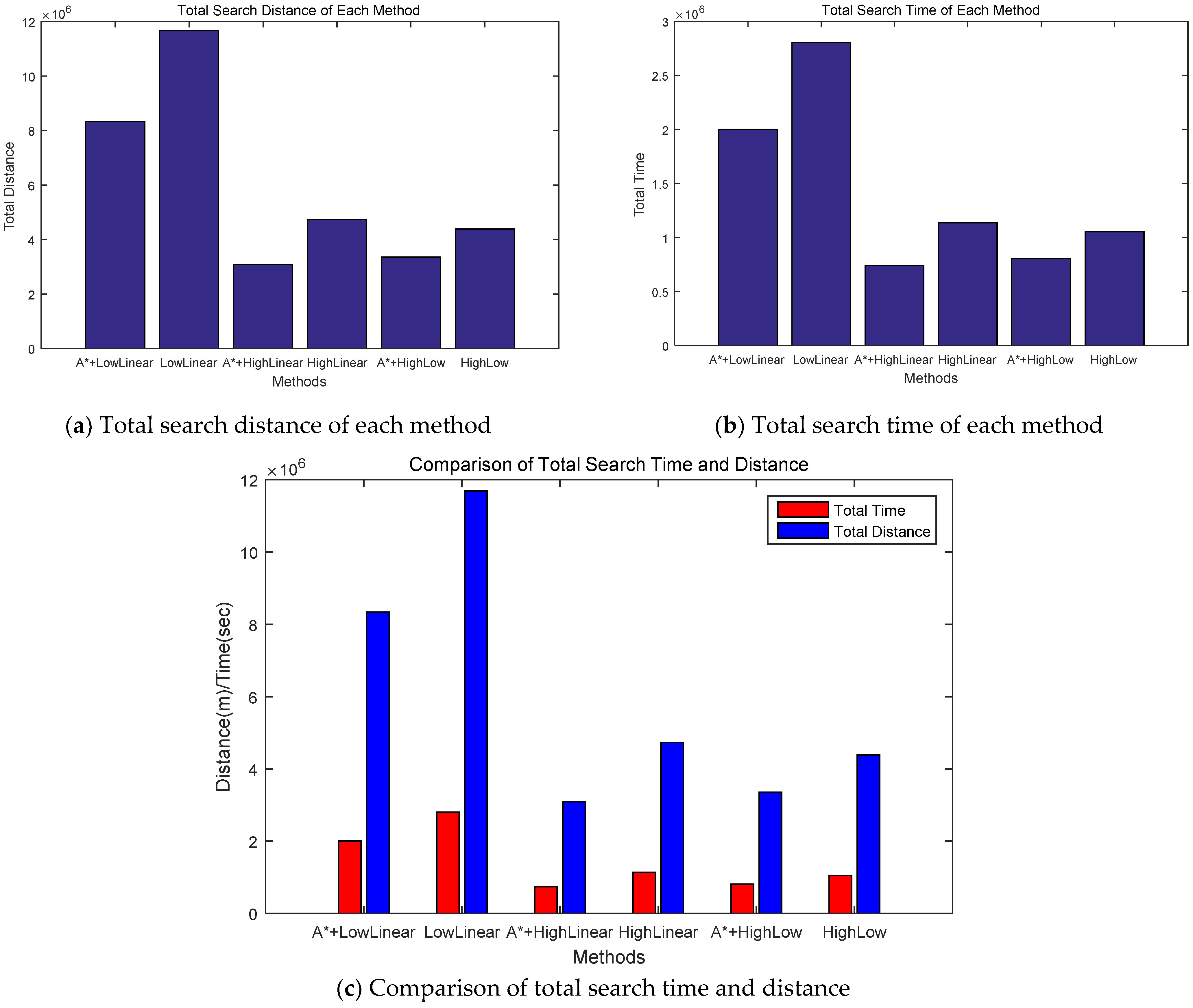
- Search method 1: Low-altitude linear search method (LowLinear). In this method, the drone searches linearly at low altitudes to find a target.
- Search method 2: High-altitude linear search method (HighLinear). In this method, the drone searches linearly at high altitudes to find a target.
- Search method 3: High-altitude and low-altitude collaboration search method (HighLow). In this method, high-altitude and low-altitude drones cooperate to find a target.
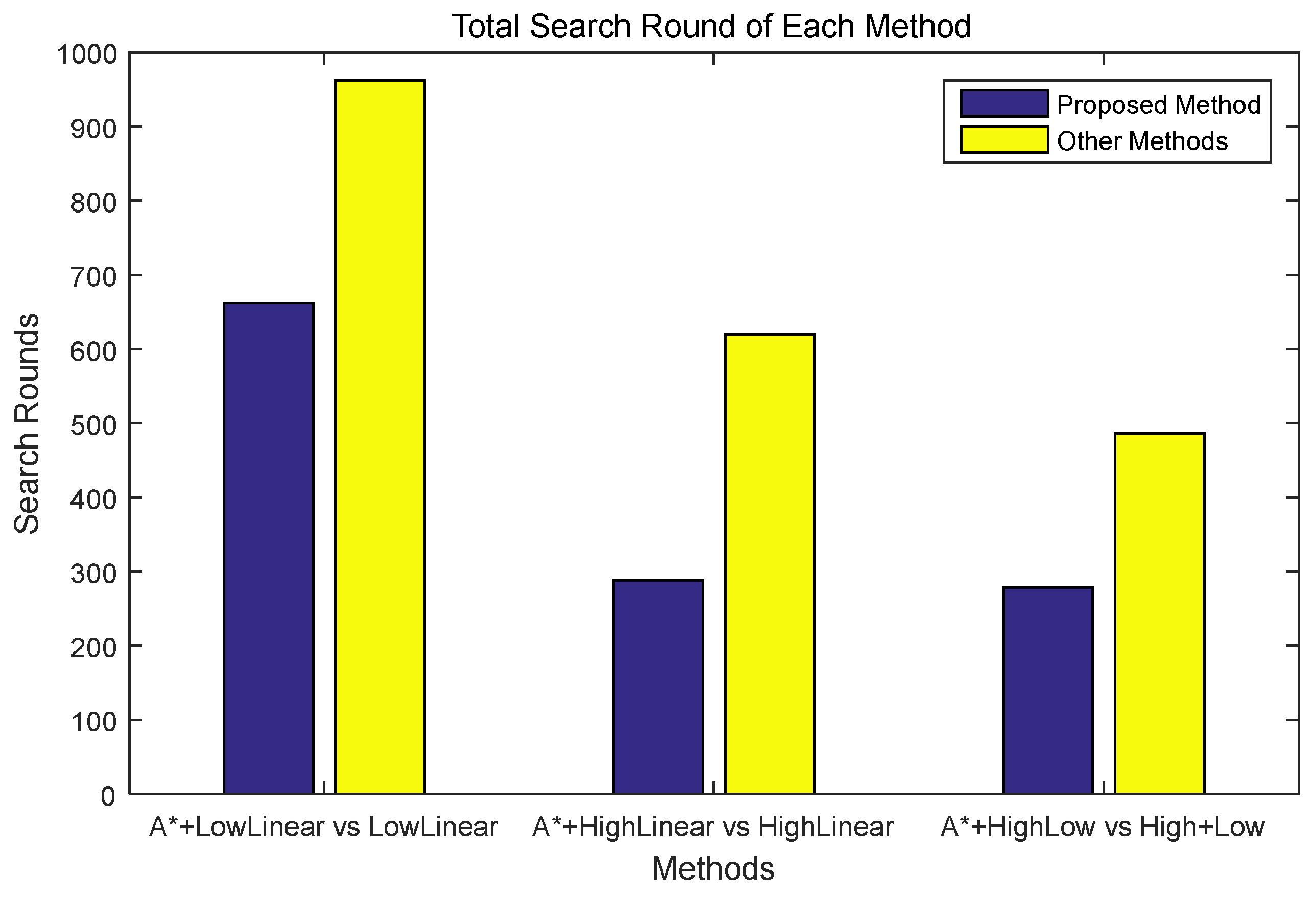
4.2. Performance Analysis
4.3. Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 71, 411–458. [Google Scholar] [CrossRef]
- Perazzo, P.; Sorbelli, F.; Conti, M.; Dini, G.; Pinotti, C. Drone Path Planning for Secure Positioning and Secure Position Verification. IEEE Trans. Mob. Comput. 2016, 16, 2478–2493. [Google Scholar] [CrossRef]
- Chuang, H.; He, D.; Namiki, A. Autonomous Target Tracking of UAV Using High-Speed Visual Feedback. Appl. Sci. 2019, 9, 4552. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory Design and Power Control for Multi-UAV Assisted Wireless Networks: A Machine Learning Approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef]
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.; Jayakody, D.; Wang, H.; Muthuchidambaranathan, P. Communication and Networking Technologies for UAVs: A Survey. J. Netw. Comput. Appl. 2020, 68, 102739. [Google Scholar] [CrossRef]
- Chung, T.; Burdick, J. Analysis of Search Decision Making Using Probabilistic Search Strategies. IEEE Trans. Robot. 2012, 28, 132–144. [Google Scholar] [CrossRef]
- Ha, I.; Cho, Y. A Probabilistic Target Search Algorithm Based on Hierarchical Collaboration for Improving Rapidity of Drones. Sensors 2018, 18, 2535. [Google Scholar] [CrossRef]
- Yang, X.; Chen, J.; Dang, Y.; Kuo, H.; Tang, Y.; Liao, C.; Chen, P.; Cheng, K. Fast Depth Prediction and Obstacle Avoidance on a Monocular Drone Using Probabilistic Convolutional Neural Network. IEEE Trans. Intell. Transp. Syst. 2021, 11, 156–167. [Google Scholar] [CrossRef]
- Lambey, V.; Prasad, A. A Review on Air Quality Measurement Using an Unmanned Aerial Vehicle. Water Air Soil Pollut. 2021, 232, 109. [Google Scholar] [CrossRef]
- Cazzato, D.; Cimarelli, C.; Lopez, J.; Voos, H.; Leo, M. A Survey of Computer Vision Methods for 2D Object Detection from Unmanned Aerial Vehicles. J. Imaging 2020, 6, 78. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Bettstetter, C.; Brown, T. Multi-objective drone path planning for search and rescue with quality-of-service requirements. Auton. Robot. 2020, 44, 1183–1198. [Google Scholar] [CrossRef]
- Shivgan, R.; Dong, Z. Energy-Efficient Drone Coverage Path Planning using Genetic Algorithm. In Proceedings of the IEEE 21st International Conference on High Performance Switching and Routing (HPSR), Newark, NJ, USA, 11–14 May 2020. [Google Scholar]
- Yao, P.; Xie, Z.; Ren, P. Optimal UAV Route Planning for Coverage Search of Stationary Target in River. IEEE Trans. Control Syst. Technol. 2017, 27, 822–829. [Google Scholar] [CrossRef]
- Chen, J.; Ling, F.; Zhang, Y.; You, T.; Liu, Y.; Du, X. Coverage path planning of heterogeneous unmanned aerial vehicles based on ant colony system. Swarm Evol. Comput. 2022, 69, 101005. [Google Scholar] [CrossRef]
- Chen, J.; Li, T.; Zhang, Y.; You, T.; Lu, Y.; Tiwari, P.; Kumar, N. Global-and-Local Attention-Based Reinforcement Learning for Cooperative Behaviour Control of Multiple UAVs. IEEE Trans. Veh. Technol. 2023, 1–13. [Google Scholar] [CrossRef]
- Wu, C.; Ju, B.; Wu, Y.; Lin, X.; Xiong, N.; Xu, G.; Li, H.; Liang, X. UAV Autonomous Target Search Based on Deep Reinforcement Learning in Complex Disaster Scene. IEEE Access 2019, 7, 117227–117245. [Google Scholar] [CrossRef]
- Deng, C.; He, S.; Han, Y.; Zhao, B. Learning Dynamic Spatial-Temporal Regularization for UAV Object Tracking. IEEE Signal Process. Lett. 2021, 28, 1230–1234. [Google Scholar] [CrossRef]
- Rabah, M.; Rohan, A.; Mohamed, S.; Kim, S. Autonomous Moving Target-Tracking for a UAV Quadcopter Based on Fuzzy-PI. IEEE Access 2019, 7, 38407–38419. [Google Scholar] [CrossRef]
- Cheng, Q.; Wang, H.; Zhu, B.; Shi, Y.; Xie, B. A Real-Time UAV Target Detection Algorithm Based on Edge Computing. Drones 2023, 7, 95. [Google Scholar] [CrossRef]
- Symington, A.; Waharte, S.; Julier, S.; Trigoni, N. Probabilistic target detection by camera-equipped UAVs. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–6 May 2010; pp. 4076–4082. [Google Scholar]
- Serna, J.; Gonsalez, F.; Vanegas, F.; Flannery, D. A Probabilistic based UAV Mission Planning and Navigation for Planetary Exploration. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Ahtens, Greece, 1–4 September 2020. [Google Scholar]
- Naula, N.; Castanon, L.; Zhang, Y.; Avila, L. UAV-Based Air Pollutant Source Localization Using Combined Metaheuristic and Probabilistic Methods. Appl. Sci. 2019, 9, 3712. [Google Scholar] [CrossRef]
- Chung, T.H.; Burdick, J.W. A decision-making framework for control strategies in probabilistic search. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation (ICRA 2007), Roma, Italy, 10–14 April 2007; pp. 4386–4393. [Google Scholar]
- Carrese, S.; D’Andreagiovanni, F.; Nardin, A.; Giacchetti, T.; Zamberlan, L. Seek & Beautify: Integrating UAVs in the optimal beautification of e-scooter sharing fleets. In Proceedings of the 2021 7th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Heraklion, Greece, 16–17 June 2021; pp. 1–6. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient Deployment of Multiple Unmanned Aerial Vehicles for Optimal Wireless Coverage. IEEE Comm. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Trotta, A.; Andreagiovanni, F.; Felice, M.; Natalizio, E.; Chowdhury, K. When UAVs Ride A Bus: Towards Energy-efficient City-scale Video Surveillance. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications, Honolulu, HI, USA, 11 October 2018; pp. 1043–1051. [Google Scholar]
- Alawad, W.; Halima, N.; Aziz, L. An Unmanned Aerial Vehicle (UAV) System for Disaster and Crisis Management in Smart Cities. Electronics 2023, 12, 1051. [Google Scholar] [CrossRef]
- Tan, L.; Lv, X.; Lian, X.; Wang, G. YOLOv4_Drone: UAV image target detection based on an improved YOLOv4 algorithm. Comput. Electr. Eng. 2021, 93, 107261. [Google Scholar] [CrossRef]
- Luo, X.; Wu, Y.; Zhao, L. YOLOD: A Target Detection Method for UAV Aerial Imagery. Remote Sens. 2022, 14, 3240. [Google Scholar] [CrossRef]
- Luo, X.; Wu, Y.; Wang, F. Target Detection Method of UAV Aerial Imagery Based on Improved YOLOv5. Remote Sens. 2022, 14, 5063. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhou, J.; Yang, Y.; Liu, L.; Liu, F.; Kong, W. Rapid Target Detection of Fruit Trees Using UAV Imaging and Improved Light YOLOv4 Algorithm. Remote Sens. 2022, 14, 4324. [Google Scholar] [CrossRef]
- Wang, T.; Qin, R.; Chen, Y.; Snoussi, H.; Choi, C. A reinforcement learning approach for UAV target searching and tracking. Multimed. Tools Appl. 2019, 78, 4347–4364. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 9 May 2016; pp. 779–788. [Google Scholar]
- Minaeian, S.; Liu, J.; Son, Y. Vision-Based Target Detection and Localization via a Team of Cooperative UAV and UGVs. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1005–1016. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Z. A Vision-Based Target Detection, Tracking, and Positioning Algorithm for Unmanned Aerial Vehicle. Wirel. Commun. Mob. Comput. 2021, 2021, 5565589. [Google Scholar] [CrossRef]
- Ren, X.; Sun, M.; Zhang, X.; Liu, L.; Zhou, H.; Ren, X. An improved mask-RCNN algorithm for UAV TIR video stream target detection. Int. J. Appl. Earth Obs. Geoinf. 2022, 106, 102660. [Google Scholar] [CrossRef]
- Mandal, M.; Kumar, L.; Vipparthi, S. MOR-UAV: A Benchmark Dataset and Baselines for Moving Object Recognition in UAV Videos. In Proceedings of the 28th ACM International Conference on Multimedia, Seattle, WA, USA, 12–16 October 2020; pp. 2626–2635. [Google Scholar]
- Zimroz, P.; Trybala, P.; Wroblewski, A.; Goralczyk, M.; Szrek, J.; Wojcik, A.; Zimroz, R. Application of UAV in Search and Rescue Actions in Underground Mine—A Specific Sound Detection in Noisy Acoustic Signal. Energies 2021, 14, 3725. [Google Scholar] [CrossRef]
- Yang, B.; Matson, E.; Smith, A.; Dietz, J.; Gallagher, J. UAV Detection System with Multiple Acoustic Nodes Using Machine Learning Models. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019. [Google Scholar]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.; Assi, C. UAV-Aided Projection-Based compressive Data Gathering in Wireless Sensor Networks. IEEE Internet Things J. 2019, 6, 1893–1905. [Google Scholar] [CrossRef]
- Abro, G.; Zulkifli, S.; Masood, R.; Asirvadam, V.; Laouiti, A. Comprehensive Review of UAV Detection, Security and Communication Advancements to Prevent Threats. Drones 2022, 6, 284. [Google Scholar] [CrossRef]
- Yuan, H.; Xiao, C.; Zhan, W.; Wang, Y.; Shi, C.; Ye, H.; Jiang, K.; Ye, Z.; Zhou, C.; Li, Q. Target Detection, Positioning and Tracking Using New UAV Gas Sensor Systems: Simulation and Analysis. J. Intell. Robot. Syst. 2019, 94, 871–882. [Google Scholar] [CrossRef]
- Pochwala, S.; Gardecki, A.; Lewandowski, P.; Somogyi, V.; Anweiler, S. Developing of Low-Cost Air Pollution Sensor—Measurements with the Unmanned Aerial Vehicles in Poland. Sensors 2020, 20, 3582. [Google Scholar] [CrossRef]
- Salmi, N.; Rustam, Z. Naïve Bayes Classifier Models for Predicting the Colon Cancer. In Proceedings of the 9th Annual Basic Science International Conference 2019 (BaSIC 2019) IOP Conference Series: Materials Science and Engineering, Malang, Indonesia, 20–21 March 2019; Volume 546. [Google Scholar]
- Cai, Y.; Xi, Q.; Xing, X.; Gui, H.; Liu, Q. Path planning for UAV tracking target based on improved A-star algorithm. In Proceedings of the 1st International Conference on Industrial Artificial Intelligence (IAI), Shenyang, China, 23–27 July 2019. [Google Scholar]
- Duchon, F.; Babinec, A.; Kajan, M.; Beno, P.; Florek, M.; Fico, T.; Jurisica, L. Path Planning with Modified a Star Algorithm for a Mobile Robot. Procedia Eng. 2014, 96, 59–64. [Google Scholar] [CrossRef]


| Category | Value |
|---|---|
| Search area | 8 × 8 cells |
| Speed | 15 km/h (4.1666667 m/s) |
| Altitudes | High altitude: 20 m (1 unit = 4 × 4 cells) Low altitude: 10 m (1 unit = 2 × 2 cells) |
| Threshold | 0.95 |
| Length of a side | 7.592 m |
| Targets | 1 (random) |
| UAVs | 1 |
| Limitations on navigation rounds | 200 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, I.-k. Improved A-Star Search Algorithm for Probabilistic Air Pollution Detection Using UAVs. Sensors 2024, 24, 1141. https://doi.org/10.3390/s24041141
Ha I-k. Improved A-Star Search Algorithm for Probabilistic Air Pollution Detection Using UAVs. Sensors. 2024; 24(4):1141. https://doi.org/10.3390/s24041141
Chicago/Turabian StyleHa, Il-kyu. 2024. "Improved A-Star Search Algorithm for Probabilistic Air Pollution Detection Using UAVs" Sensors 24, no. 4: 1141. https://doi.org/10.3390/s24041141
APA StyleHa, I.-k. (2024). Improved A-Star Search Algorithm for Probabilistic Air Pollution Detection Using UAVs. Sensors, 24(4), 1141. https://doi.org/10.3390/s24041141