

OPTILOD: Optimal Beacon Placement for High-Accuracy Indoor Localization of Drones



Abstract
1. Introduction
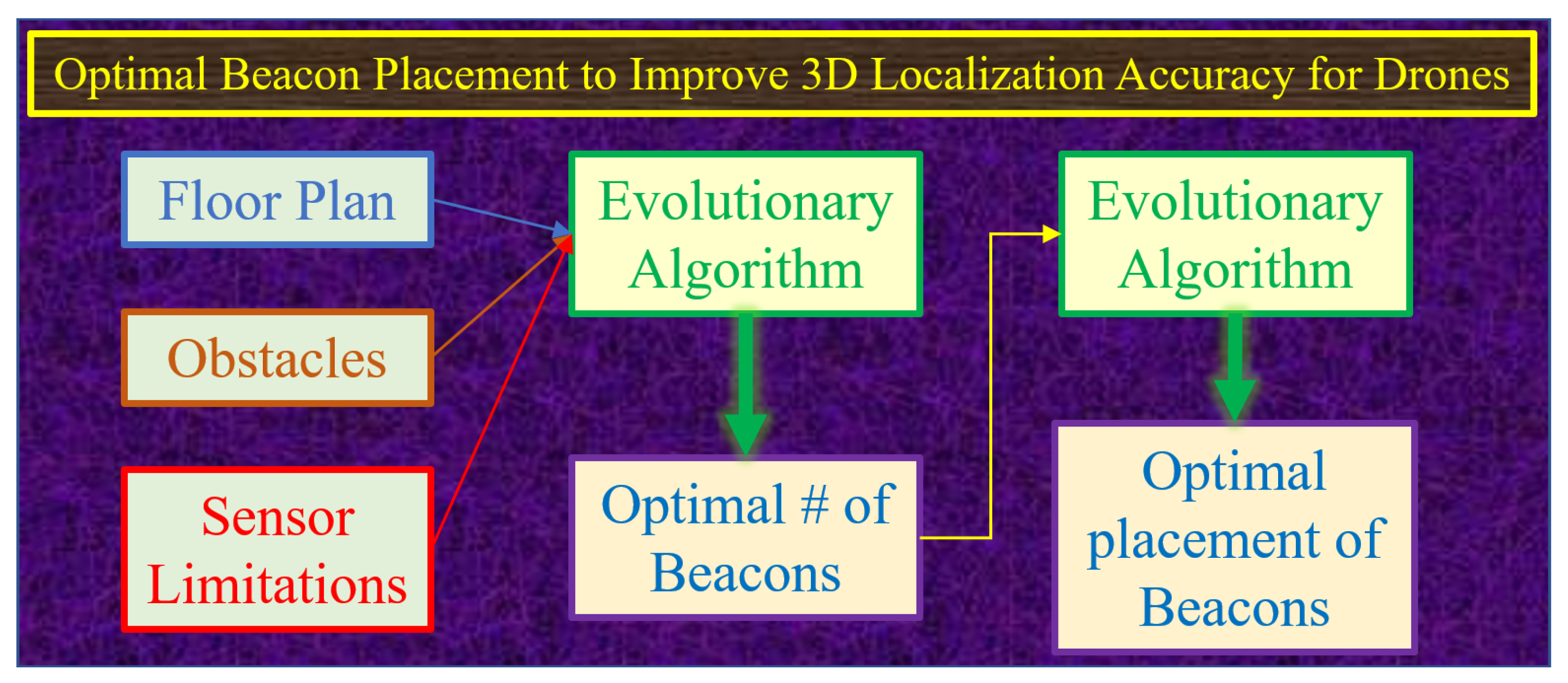
- We propose OPTILOD, an optimization algorithm for the optimal placement of beacons in three-dimensional indoor environments.
- OPTILOD computes the minimum number of beacons required to provide full coverage for any indoor area regardless of its dimensions, thereby reducing deployment costs.
- OPTILOD generates the optimal beacon placement that achieves both full coverage and minimizes the localization error induced by the relative geometry between the transmitters and receivers.
- OPTILOD is the first design for an evolutionary algorithm that formulates these two NP-hard beacon placement problems as a dual optimization objective and generates solutions within a tractable time.
- We evaluate OPTILOD using comprehensive simulations and realistic environmental indoor parameters. Our results show that OPTILOD generates beacon placements that are either optimal or within a one-beacon difference of the theoretical optimal number of beacons while minimizing the localization error across the entire indoor area.
2. Motivation
3. Related Work
4. Localization in the Absence of GPS
4.1. Background
4.2. Three-Dimensional Trilateration
5. Optimal Beacon Placement Problem Formulation
5.1. Mathematical Formulation of the Localization Error
5.2. Problem Definition
6. Design of Algorithm for Optimal Beacon Placement
| Algorithm 1 Four-Connectivity Optimal Beacon Placement |
|
| Algorithm 2 GDOP Optimal Beacon Placement |
|
7. Simulation Setup and Evaluation
7.1. Simulation Setup
7.2. Results and Comparative Analysis
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GPS | Global Positioning System |
| MIP | Mixed Integer Programming |
| VO | Visual Odometry |
| SLAM | Simultaneous Localization and Mapping |
| CSI | Channel State Information |
| AOA | Angle of Arrival |
| TOA | Time of Arrival |
| TDOA | Time Difference of Arrival |
| RSS | Received Signal Strength |
| GDOP | Geometric Dilution of Precision |
| Wi-Fi | Wireless Fidelity |
| LTE | Long-Term Evolution |
| NR | New Radio |
| LOS | Line of Sight |
| NLOS | Non-Line of Sight |
| CPU | Central Processing Unit |
| RAM | Random Access Memory |
| GPU | Graphics Processing Unit |
References
- Wawrla, L.; Maghazei, O.; Netland, T. Applications of drones in warehouse operations. Whitepaper ETH Zurich D-MTEC 2019, 212, 1–12. [Google Scholar]
- Indoor drones in Power & Utilities. 2021. Available online: https://www.flyability.com/power-and-utilities (accessed on 15 February 2024).
- Lima, R.R.; Pereira, G.A. A Multi-model Framework for Tether-based Drone Localization. J. Intell. Robot. Syst. 2023, 108, 20. [Google Scholar] [CrossRef]
- Sesyuk, A.; Ioannou, S.; Raspopoulos, M. 3D millimeter-Wave Indoor Localization. In Proceedings of the 2023 13th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nuremberg, Germany, 25–28 September 2023; pp. 1–7. [Google Scholar] [CrossRef]
- Famili, A.; Stavrou, A.; Wang, H.; Park, J.M. iDROP: Robust Localization for Indoor Navigation of Drones With Optimized Beacon Placement. IEEE Internet Things J. 2023, 10, 14226–14238. [Google Scholar] [CrossRef]
- Leitch, S.G.; Ahmed, Q.Z.; Abbas, W.B.; Hafeez, M.; Laziridis, P.I.; Sureephong, P.; Alade, T. On indoor localization using WiFi, BLE, UWB, and IMU technologies. Sensors 2023, 23, 8598. [Google Scholar] [CrossRef] [PubMed]
- Ashraf, S.; Aggarwal, P.; Damacharla, P.; Wang, H.; Javaid, A.Y.; Devabhaktuni, V. A low-cost solution for unmanned aerial vehicle navigation in a global positioning system–denied environment. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718781750. [Google Scholar] [CrossRef]
- Perez-Grau, F.J.; Ragel, R.; Caballero, F.; Viguria, A.; Ollero, A. An architecture for robust UAV navigation in GPS-denied areas. J. Field Robot. 2017, 35, 121–145. [Google Scholar] [CrossRef]
- Balamurugan, G.; Valarmathi, J.; Naidu, V.P.S. Survey on UAV navigation in GPS denied environments. In Proceedings of the 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), Paralakhemundi, India, 3–5 October 2016; pp. 198–204. [Google Scholar] [CrossRef]
- Kassas, Z.; Morales, J.; Shamaei, K.; Khalife, J. LTE steers UAV: No GPS? No problem! Signals of opportunity work in challenged environments. GPS World 2017, 28, 18–25. [Google Scholar]
- Chen, C.; Chen, Y.; Han, Y.; Lai, H.; Liu, K.J.R. Achieving Centimeter-Accuracy Indoor Localization on WiFi Platforms: A Frequency Hopping Approach. IEEE Internet Things J. 2017, 4, 111–121. [Google Scholar] [CrossRef]
- Famili, A.; Park, J.M.J. ROLATIN: Robust Localization and Tracking for Indoor Navigation of Drones. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC) (IEEE WCNC 2020), Seoul, Republic of Korea, 25–28 May 2020. [Google Scholar]
- Sun, Y.; Wang, W.; Mottola, L.; Zhang, J.; Wang, R.; He, Y. Indoor Drone Localization and Tracking Based on Acoustic Inertial Measurement. IEEE Trans. Mob. Comput. 2023, 1–15. [Google Scholar] [CrossRef]
- Mao, W.; Zhang, Z.; Qiu, L.; He, J.; Cui, Y.; Yun, S. Indoor Follow Me Drone. In Proceedings of the 15th Annual International Conference on Mobile Systems, Applications, and Services (MobiSys ’17), Niagara Falls, NY, USA, 19–23 June 2017; pp. 345–358. [Google Scholar] [CrossRef]
- Famili, A.; Atalay, T.O.; Stavrou, A.; Wang, H.; Park, J.M. OFDRA: Optimal Femtocell Deployment for Accurate Indoor Positioning of RIS-Mounted AVs. IEEE J. Sel. Areas Commun. 2023, 41, 3783–3798. [Google Scholar] [CrossRef]
- Sandamini, C.; Maduranga, M.W.P.; Tilwari, V.; Yahaya, J.; Qamar, F.; Nguyen, Q.N.; Ibrahim, S.R.A. A Review of Indoor Positioning Systems for UAV Localization with Machine Learning Algorithms. Electronics 2023, 12, 1533. [Google Scholar] [CrossRef]
- Firdaus, A.R.; Hutagalung, A.; Syahputra, A.; Analia, R. Indoor Localization Using Positional Tracking Feature of Stereo Camera on Quadcopter. Electronics 2023, 12, 406. [Google Scholar] [CrossRef]
- Basiri, A.; Mariani, V.; Glielmo, L. Improving Visual SLAM by Combining SVO and ORB-SLAM2 with a Complementary Filter to Enhance Indoor Mini-Drone Localization under Varying Conditions. Drones 2023, 7, 404. [Google Scholar] [CrossRef]
- Famili, A.; Stavrou, A.; Wang, H.; Park, J.M.J. RAIL: Robust Acoustic Indoor Localization for Drones. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Xu, Y.; Wan, D.; Shmaliy, Y.S.; Chen, X.; Shen, T.; Bi, S. Dual Free-Size LS-SVM Assisted Maximum Correntropy Kalman Filtering for Seamless INS-Based Integrated Drone Localization. IEEE Trans. Ind. Electron. 2023, 1–10. [Google Scholar] [CrossRef]
- Himona, G.; Famili, A.; Stavrou, A.; Kovanis, V.; Kominis, Y. Isochrons in tunable photonic oscillators and applications in precise positioning. In Proceedings of the Physics and Simulation of Optoelectronic Devices XXXI, SPIE, San Francisco, CA, USA, 28 January–3 February 2023; Volume 12415, pp. 82–86. [Google Scholar]
- Mao, W.; He, J.; Qiu, L. CAT: High-precision acoustic motion tracking. In Proceedings of the MobiCom, New York, NY, USA, 3 –7 October 2016; pp. 69–81. [Google Scholar]
- Xiong, J.; Sundaresan, K.; Jamieson, K. ToneTrack: Leveraging Frequency-Agile Radios for Time-Based Indoor Wireless Localization. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking (MobiCom ’15), Paris, France, 7–11 September 2015; pp. 537–549. [Google Scholar] [CrossRef]
- Gonzalez, J.R.; Bleakley, C.J. High-Precision Robust Broadband Ultrasonic Location and Orientation Estimation. IEEE J. Sel. Top. Signal Process. 2009, 3, 832–844. [Google Scholar] [CrossRef]
- Famili, A.; Stavrou, A.; Wang, H.; Park, J.M.J. PILOT: High-Precision Indoor Localization for Autonomous Drones. IEEE Trans. Veh. Technol. 2022, 72, 6445–6459. [Google Scholar] [CrossRef]
- Padhy, R.P.; Verma, S.; Ahmad, S.; Choudhury, S.K.; Sa, P.K. Deep Neural Network for Autonomous UAV Navigation in Indoor Corridor Environments. Procedia Comput. Sci. 2018, 133, 643–650, International Conference on Robotics and Smart Manufacturing (RoSMa2018). [Google Scholar] [CrossRef]
- Jeong, N.; Hwang, H.; Matson, E.T. Evaluation of low-cost LiDAR sensor for application in indoor UAV navigation. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Republic of Korea, 12–14 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Rajagopal, N. Localization, Beacon Placement and Mapping for Range-Based Indoor Localization Systems. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 2019. [Google Scholar]
- Famili, A.; Atalay, T.; Stavrou, A.; Wang, H. Wi-Five: Optimal Placement of Wi-Fi Routers in 5G Networks for Indoor Drone Navigation. In Proceedings of the 2023 IEEE 97th Vehicular Technology Conference (VTC2023-Spring), Florence, Italy, 20–23 June 2023; pp. 1–7. [Google Scholar] [CrossRef]
- Wang, H.; Rajagopal, N.; Rowe, A.; Sinopoli, B.; Gao, J. Efficient Beacon Placement Algorithms for Time-of-Flight Indoor Localization. In Proceedings of the 27th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (SIGSPATIAL ’19), Chicago, IL, USA, 5–8 November 2019; pp. 119–128. [Google Scholar] [CrossRef]
- Rajagopal, N.; Chayapathy, S.; Sinopoli, B.; Rowe, A. Beacon placement for range-based indoor localization. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Sharma, R.; Badarla, V. Analysis of a Novel Beacon Placement Strategy 3D Localization in Indoor Spaces. In Proceedings of the 2019 11th International Conference on Communication Systems Networks (COMSNETS), Bengaluru, India, 7–11 January 2019; pp. 320–327. [Google Scholar] [CrossRef]
- Schmalenstroeer, J.; Haeb-Umbach, R. Investigations into Bluetooth low energy localization precision limits. In Proceedings of the 2016 24th European Signal Processing Conference (EUSIPCO), Budapest, Hungary, 29 August–2 September 2016; pp. 652–656. [Google Scholar] [CrossRef]
- Famili, A.; Stavrou, A.; Wang, H.; Park, J.M.J. EGO-6: Enhancing Geofencing Security Systems with Optimal Deployment of 6G TRPs. In Proceedings of the 2023 Silicon Valley Cybersecurity Conference (SVCC), San Jose, CA, USA, 17–19 May 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Patwari, N.; Hero, A.O.; Perkins, M.; Correal, N.S.; O’Dea, R.J. Relative location estimation in wireless sensor networks. IEEE Transactions on Signal Processing 2003, 51, 2137–2148. [Google Scholar] [CrossRef]
- Dai, W.; Shen, Y.; Win, M.Z. A Computational Geometry Framework for Efficient Network Localization. IEEE Trans. Inf. Theory 2018, 64, 1317–1339. [Google Scholar] [CrossRef]
- Wang, T.; Shen, Y.; Conti, A.; Win, M.Z. Network Navigation With Scheduling: Error Evolution. IEEE Trans. Inf. Theory 2017, 63, 7509–7534. [Google Scholar] [CrossRef]
- Famili, A.; Atalay, T.; Stavrou, A.; Wang, H. Wi-Six: Precise Positioning in the Metaverse via Optimal Wi-Fi Router Deployment in 6G Networks. In Proceedings of the 2023 IEEE International Conference on Metaverse Computing, Networking and Applications (MetaCom), Kyoto, Japan, 26–28 June 2023; pp. 17–24. [Google Scholar] [CrossRef]
- Shoudha, S.N.; Helwa, S.; Van Marter, J.P.; Torlak, M.; Al-Dhahir, N. WiFi 5GHz CSI-Based Single-AP Localization with Centimeter-Level Median Error. IEEE Access 2023, 11, 112470–112482. [Google Scholar] [CrossRef]
- Famili, A.; Foruhandeh, M.; Atalay, T.; Stavrou, A.; Wang, H. GPS Spoofing Detection by Leveraging 5G Positioning Capabilities. In Proceedings of the 2022 IEEE Latin-American Conference on Communications (LATINCOM), Rio de Janeiro, Brazil, 30 November–2 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Girolami, M.; Furfari, F.; Barsocchi, P.; Mavilia, F. A Bluetooth 5.1 Dataset Based on Angle of Arrival and RSS for Indoor Localization. IEEE Access 2023, 11, 81763–81776. [Google Scholar] [CrossRef]
- Famili, A.; Slyusar, V.; Lee, Y.H.; Stavrou, A. Vehicular Teamwork for Better Positioning. In Proceedings of the 2023 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Honolulu, Oahu, HI, USA, 1–4 October 2023; pp. 3507–3513. [Google Scholar] [CrossRef]
- Spirito, M.A. On the accuracy of cellular mobile station location estimation. IEEE Trans. Veh. Technol. 2001, 50, 674–685. [Google Scholar] [CrossRef]
- Massatt, P.; Rudnick, K. Geometric Formulas for Dilution of Precision Calculations. Navig. J. Inst. Navig. 1990, 37, 379–392. [Google Scholar] [CrossRef]
- Famili, A.; Stavrou, A.; Wang, H.; Park, J.M.J. SPIN: Sensor Placement for Indoor Navigation of Drones. In Proceedings of the 2022 IEEE Latin-American Conference on Communications (LATINCOM), Rio de Janeiro, Brazil, 30 November–2 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Lee, D.; Lin, A. Computational complexity of art gallery problems. IEEE Trans. Inf. Theory 1986, 32, 276–282. [Google Scholar] [CrossRef]
- Eskandari, M.; Sadeghi Bigham, B.; Zahedi-Seresht, M. Lower Bound for Sculpture Garden Problem: Localization of IoT Devices. Appl. Sci. 2023, 13, 2597. [Google Scholar] [CrossRef]
- Abrahamsen, M.; Adamaszek, A.; Miltzow, T. The art gallery problem is ∃R-complete. ACM J. ACM (JACM) 2021, 69, 1–70. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
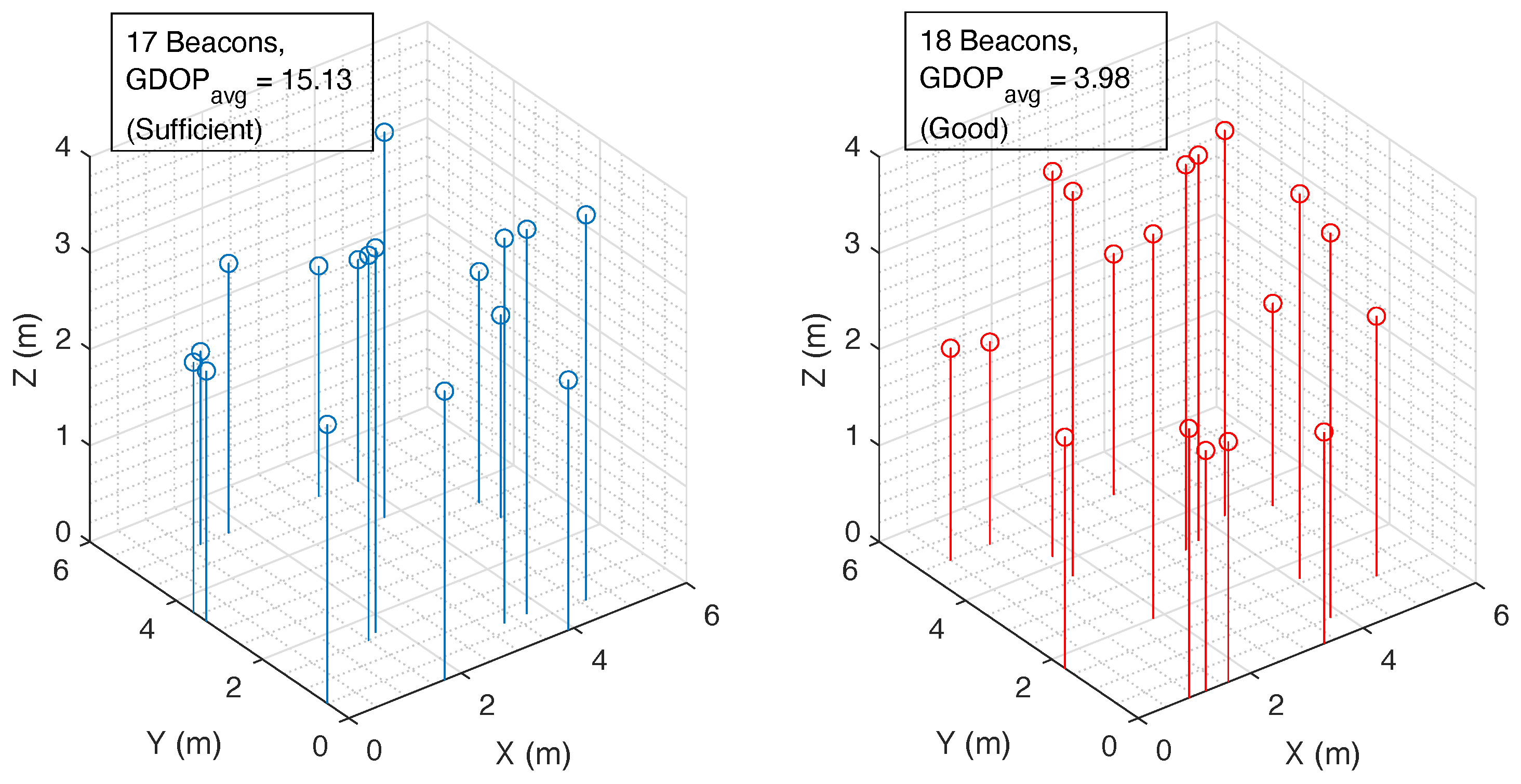
| GDOP Values | Evaluation of the Geometry of the Beacons |
|---|---|
| 1 | Ideal |
| 1–2 | Very Good |
| 2–5 | Good |
| 5–10 | Medium |
| 10–20 | Sufficient |
| >20 | Bad |
| Room Dimensions (m) | # of Beacons Calculated by SPIN | # of Alternatives, Coverage | # of Alternatives, Coverage |
|---|---|---|---|
| 4 | 18 | 0 | |
| 17 | 37 | 213 | |
| 18 | 18 | 232 | |
| 62 | 15 | 235 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Famili, A.; Stavrou, A.; Wang, H.; Park, J.-M. OPTILOD: Optimal Beacon Placement for High-Accuracy Indoor Localization of Drones. Sensors 2024, 24, 1865. https://doi.org/10.3390/s24061865
Famili A, Stavrou A, Wang H, Park J-M. OPTILOD: Optimal Beacon Placement for High-Accuracy Indoor Localization of Drones. Sensors. 2024; 24(6):1865. https://doi.org/10.3390/s24061865
Chicago/Turabian StyleFamili, Alireza, Angelos Stavrou, Haining Wang, and Jung-Min (Jerry) Park. 2024. "OPTILOD: Optimal Beacon Placement for High-Accuracy Indoor Localization of Drones" Sensors 24, no. 6: 1865. https://doi.org/10.3390/s24061865
APA StyleFamili, A., Stavrou, A., Wang, H., & Park, J.-M. (2024). OPTILOD: Optimal Beacon Placement for High-Accuracy Indoor Localization of Drones. Sensors, 24(6), 1865. https://doi.org/10.3390/s24061865