


Resilient Multi-Sensor UAV Navigation with a Hybrid Federated Fusion Architecture


Abstract
1. Introduction
- The research introduces, in a three-dimensional scenario, a hybrid fusion architecture that integrates GRU (gated recurrent unit) and EKF (extended Kalman filter) systems. This study offers a detailed comparison of the new hybrid approach against the traditional FF (federated fusion) architecture.
- To evaluate the performance of the proposed hybrid FF architecture using a range of realistic trajectories with the aim of mimicking real-world UAV operations, including multipath and GNSS outages.
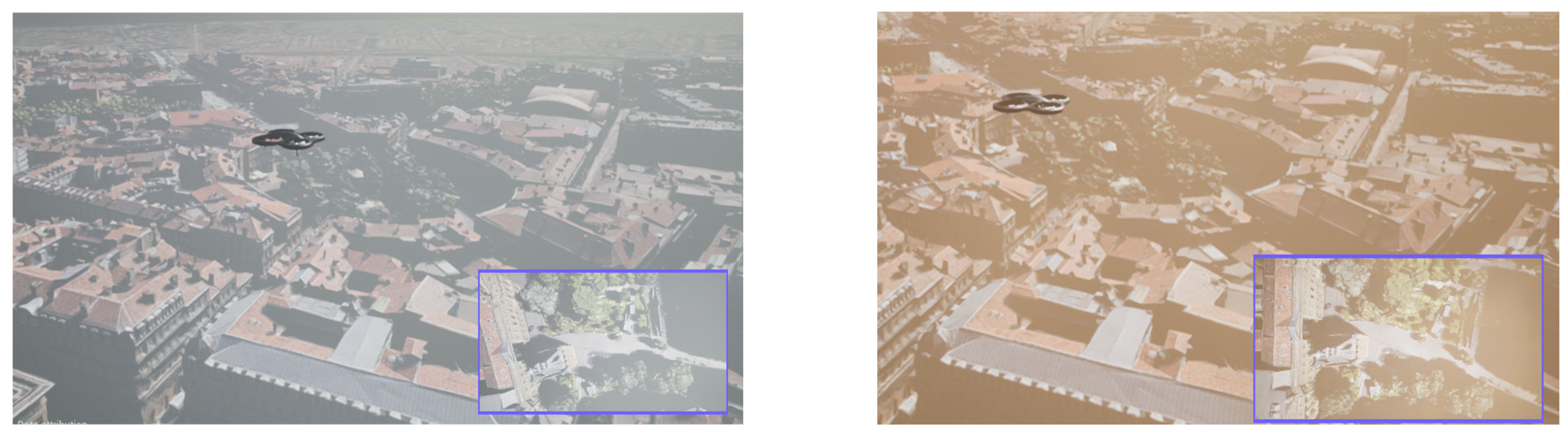
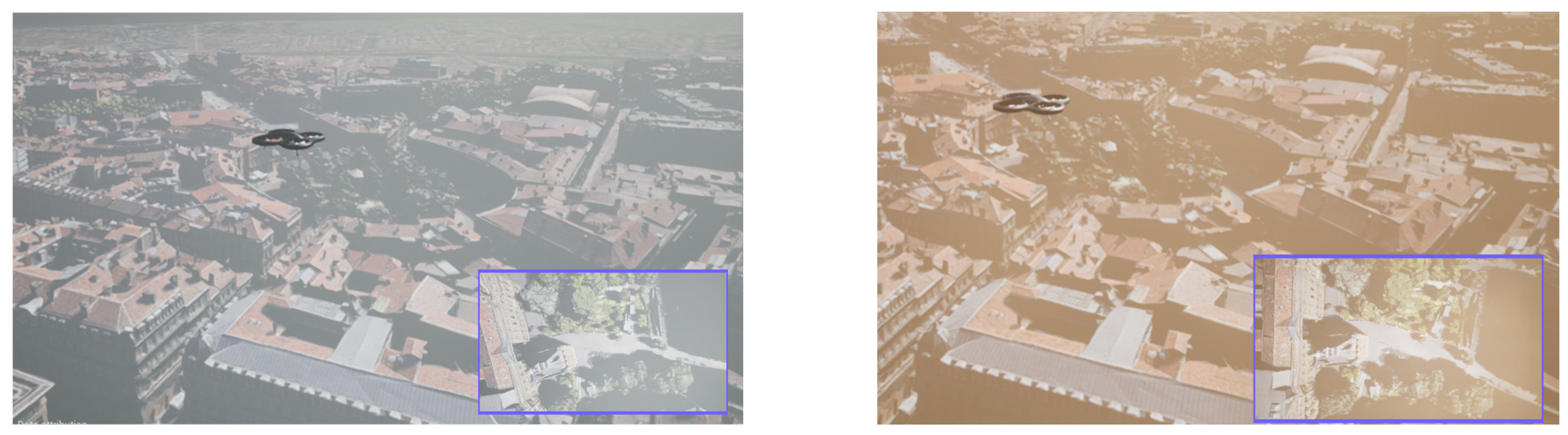
- To assess the influence of the optical part of the fusion algorithm by introducing various weather conditions, including dust and fog. In addition, the VO algorithm was tested during different light intensities, both in the afternoon and in the evening, using realistic photogrammetry data.
2. Related Works
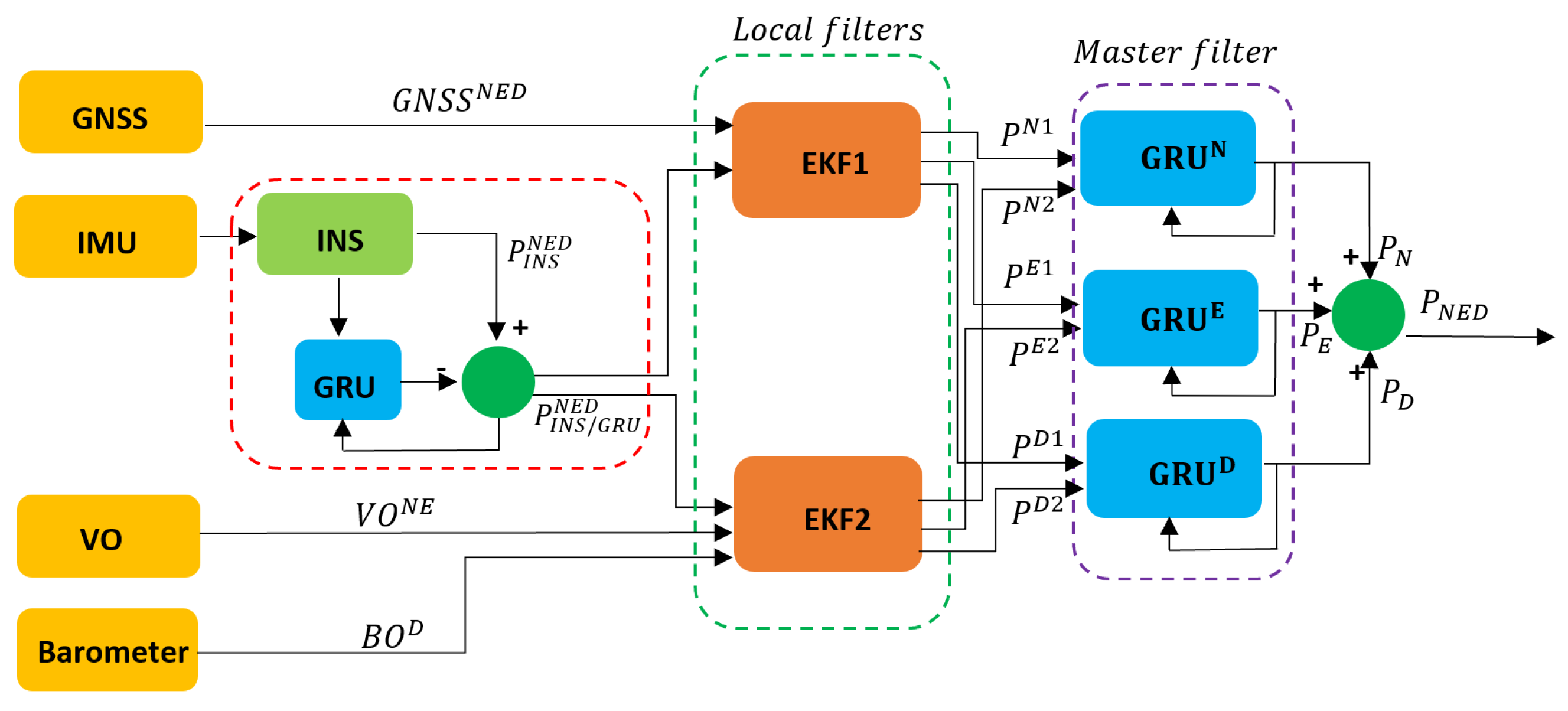
3. Proposed Hybrid Federated Fusion Solution
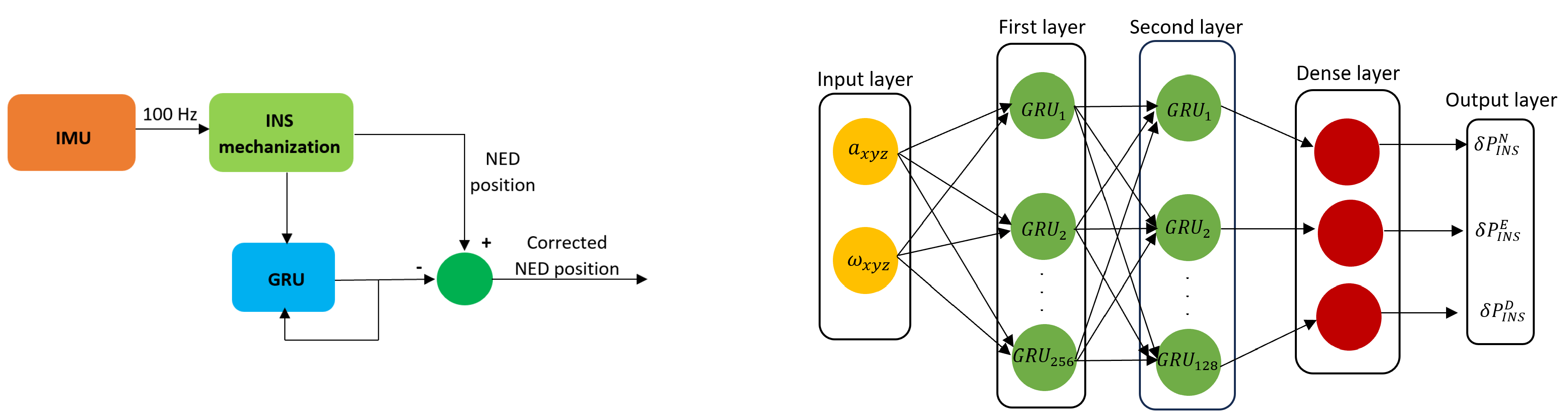
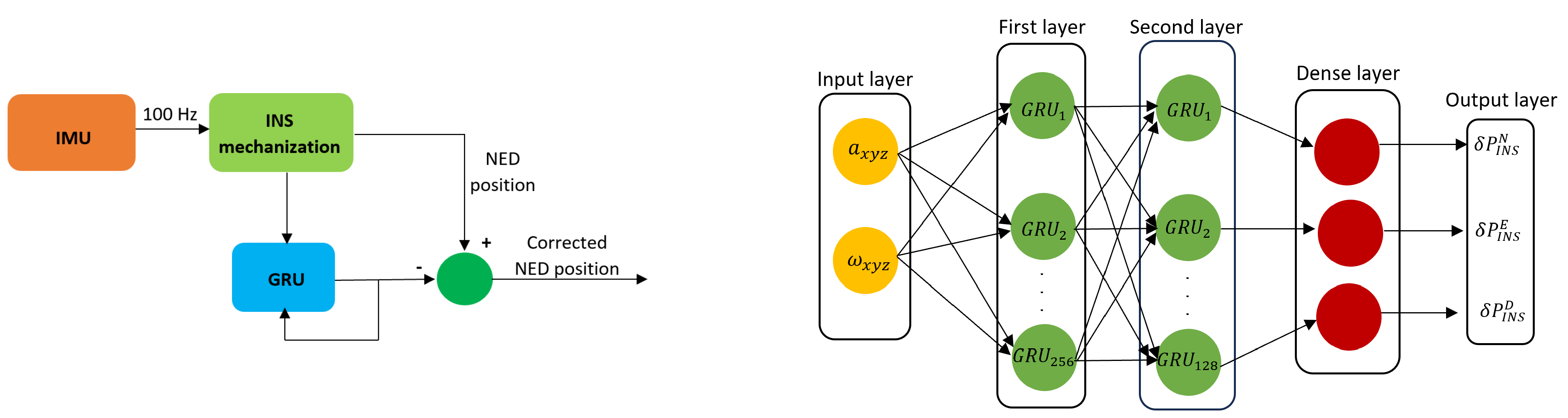
3.1. Trained INS GRU
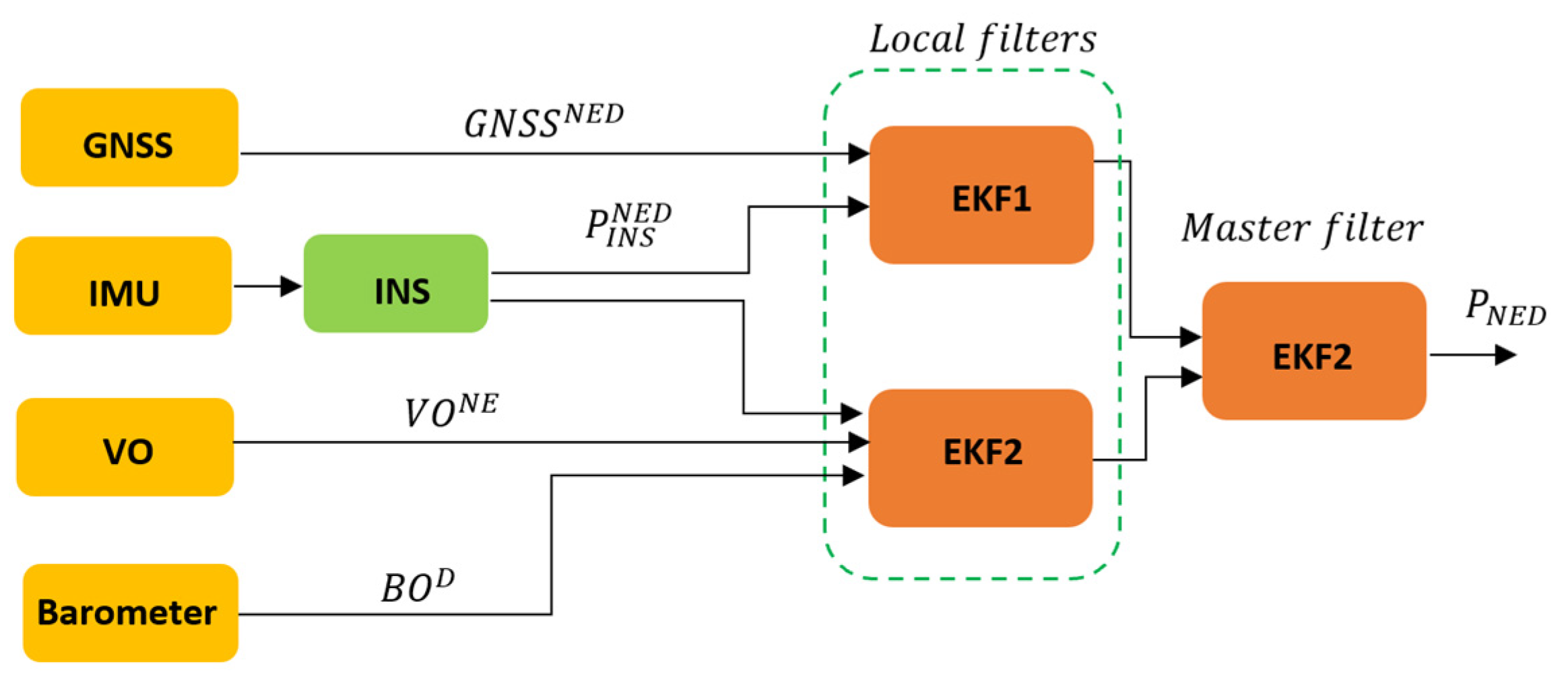
3.2. GNSS/INS EKF
3.3. INS/VO/Barometer EKF
- -
- 2D to 2D (both features are specified in 2D image coordinates between two frames)
- -
- 3D to 3D (both features are specified in 3D image coordinates between two frames)
- -
- 3D to 2D (previous features are specified in 3D coordinates and the current features in 2D image coordinates)
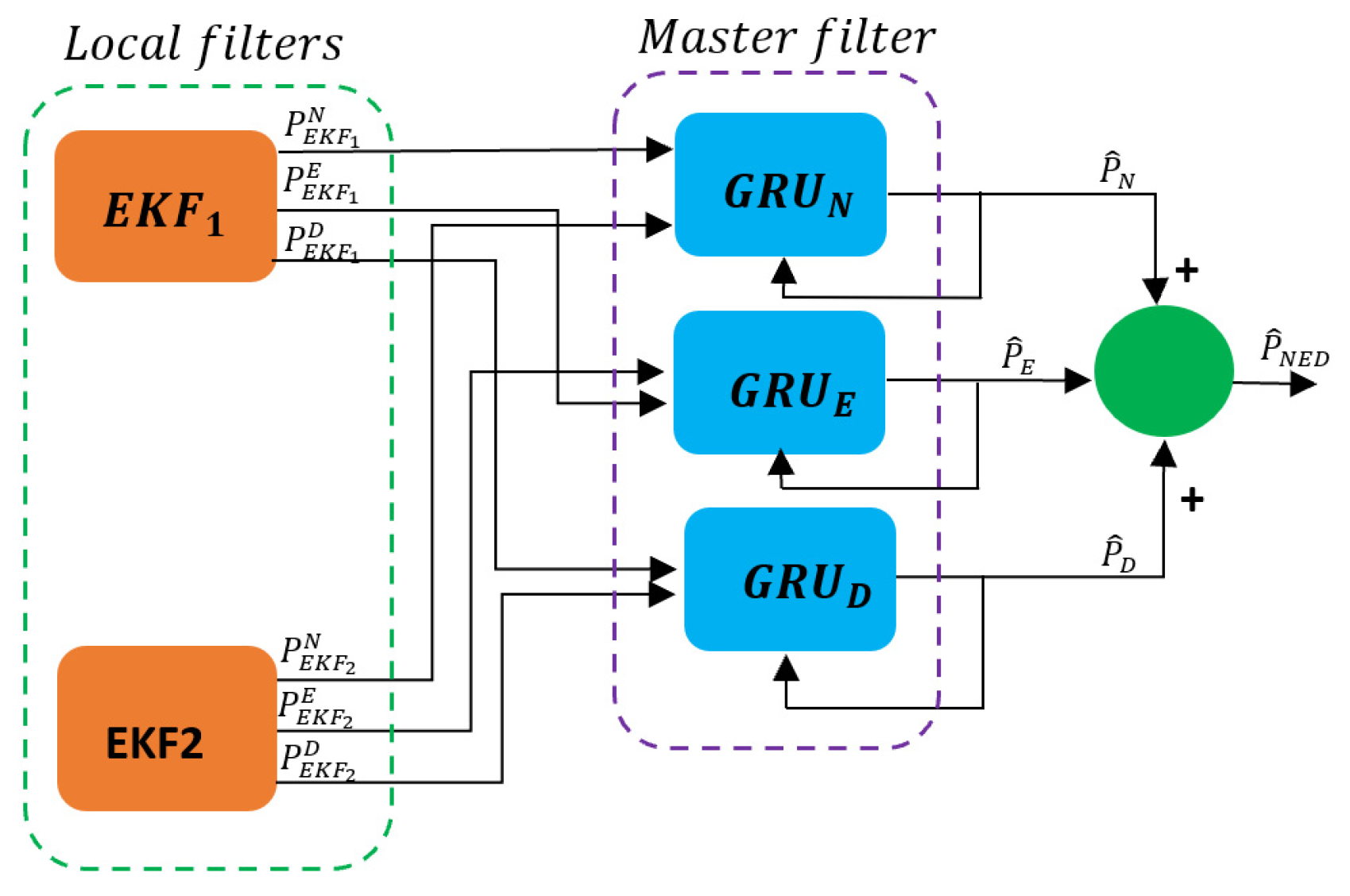
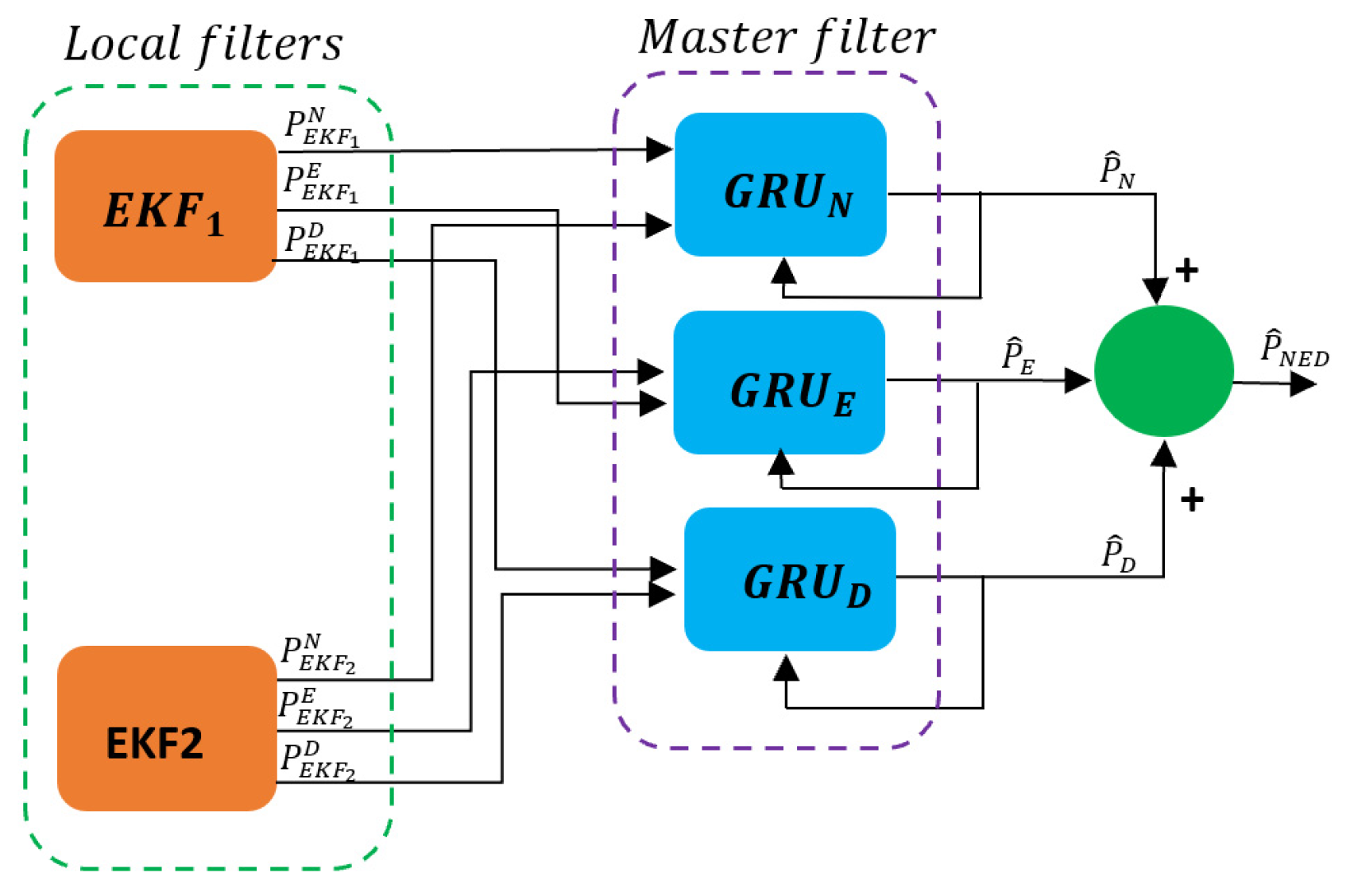
3.4. Master Filter
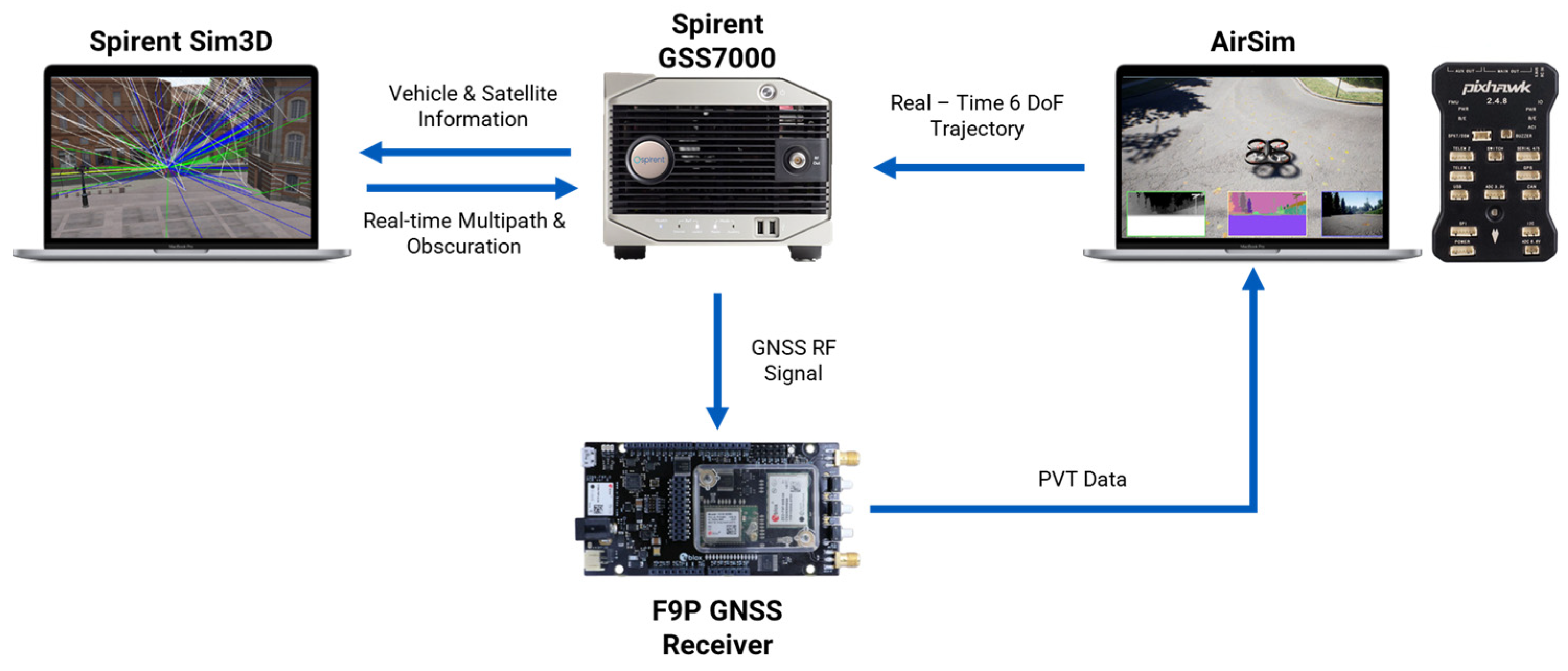
4. Hardware in the Loop Configuration
5. Evaluation
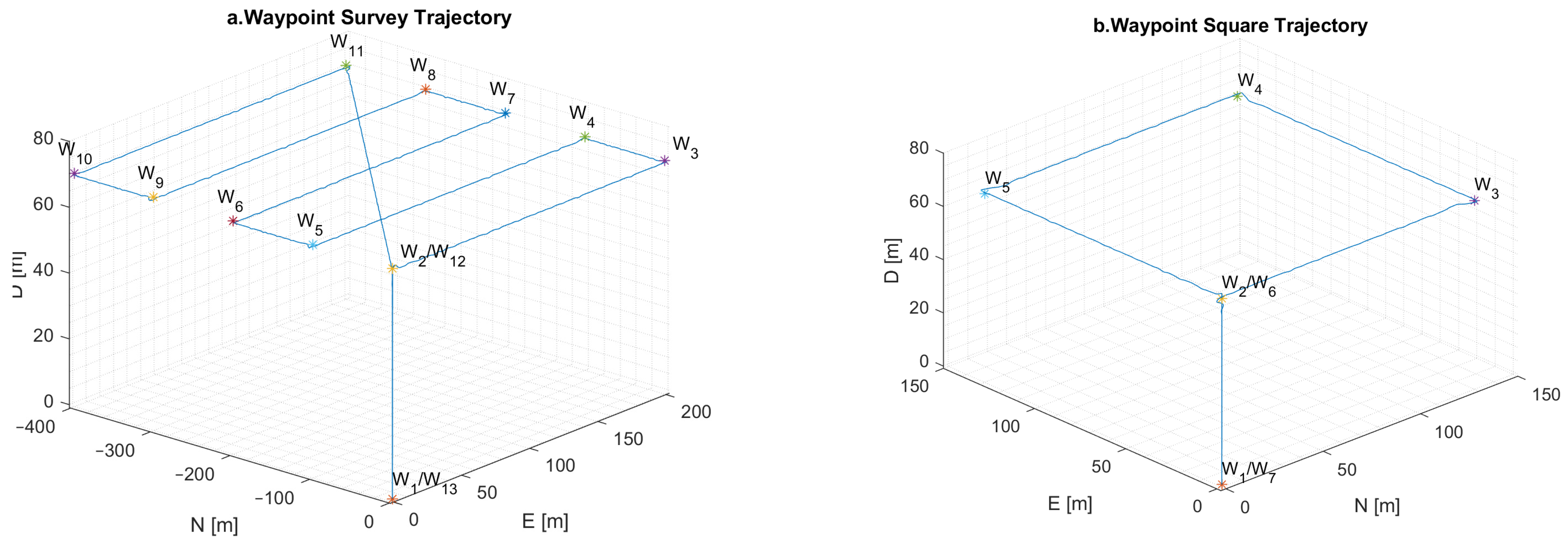
5.1. Scenario Definition
5.2. Light and Weather Evaluation
5.3. Camera Calibration Set-Up
5.4. Conventional Federated Filter Architecture
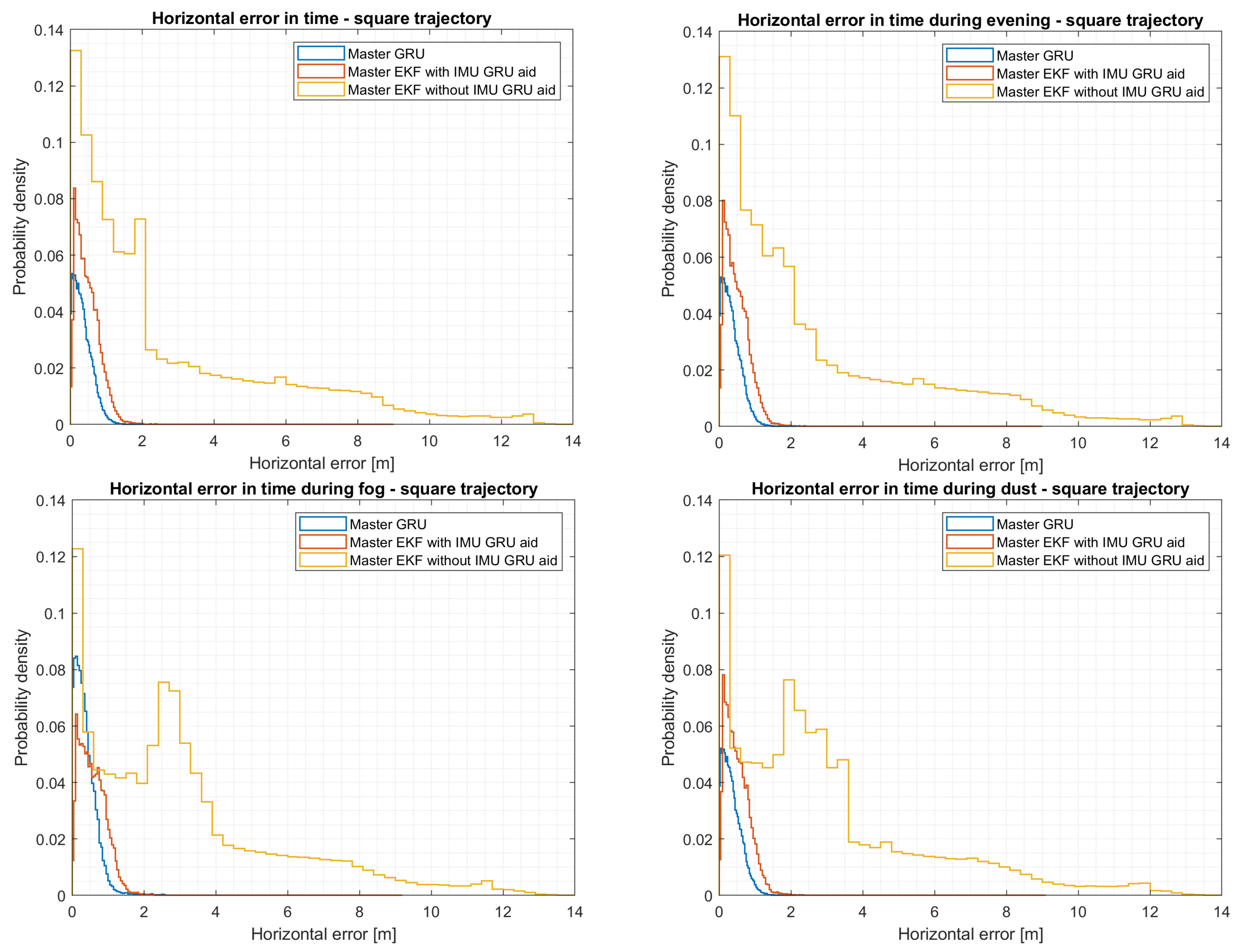
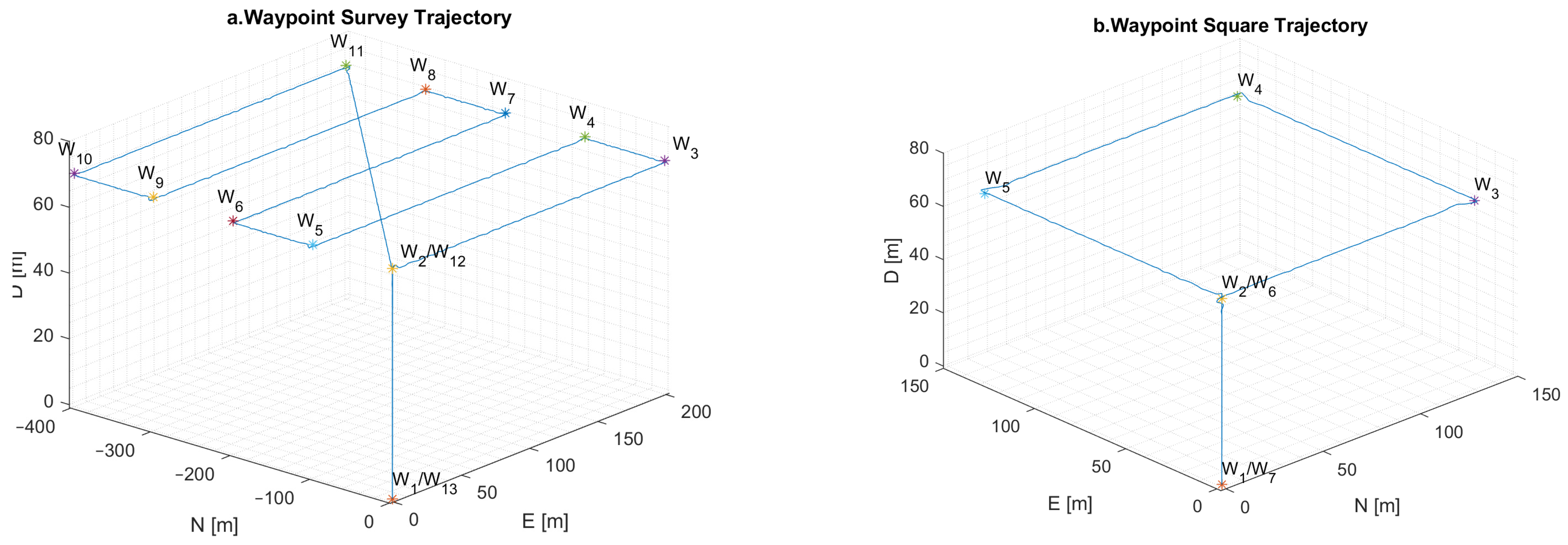
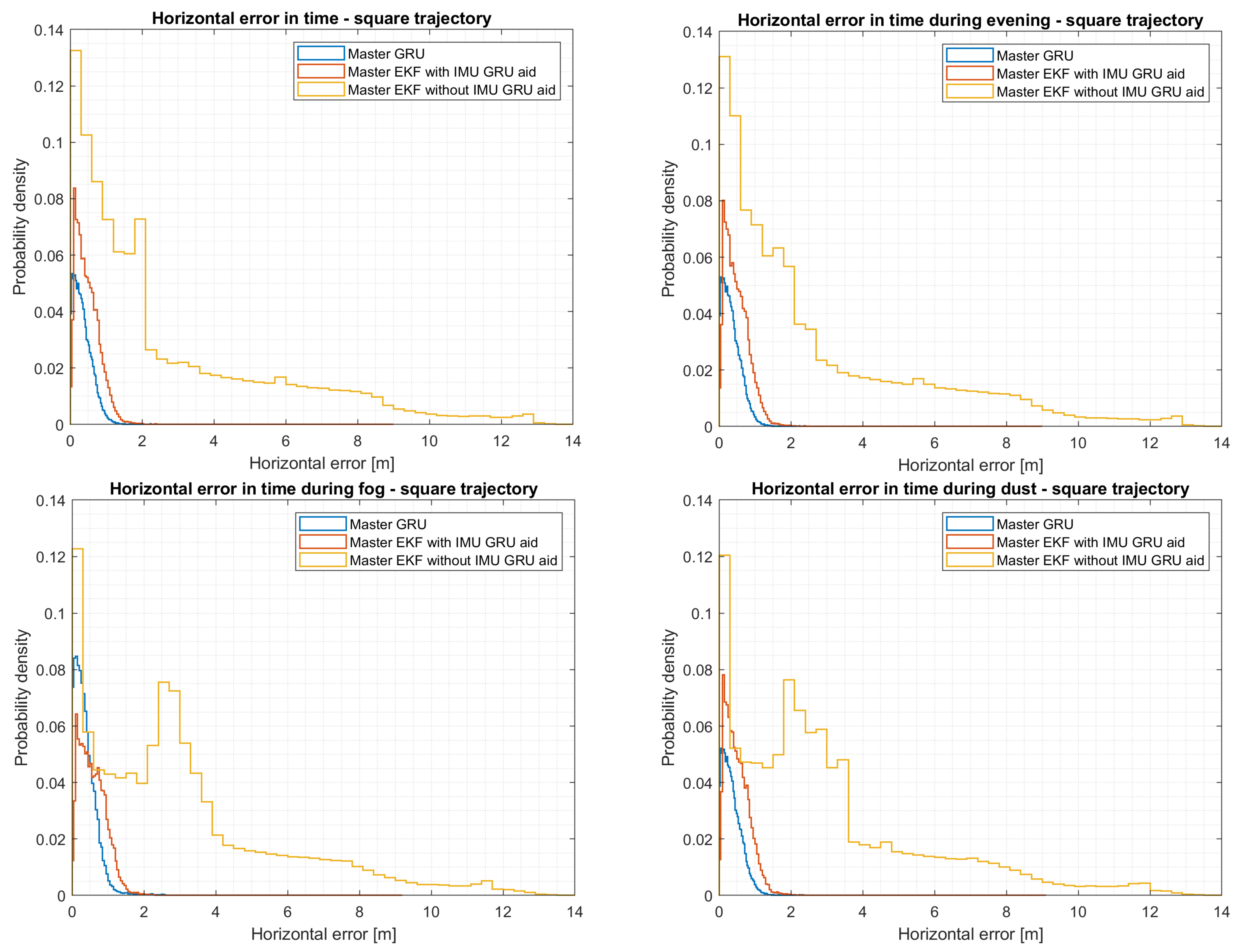
5.5. Evaluation of the Square Trajectory
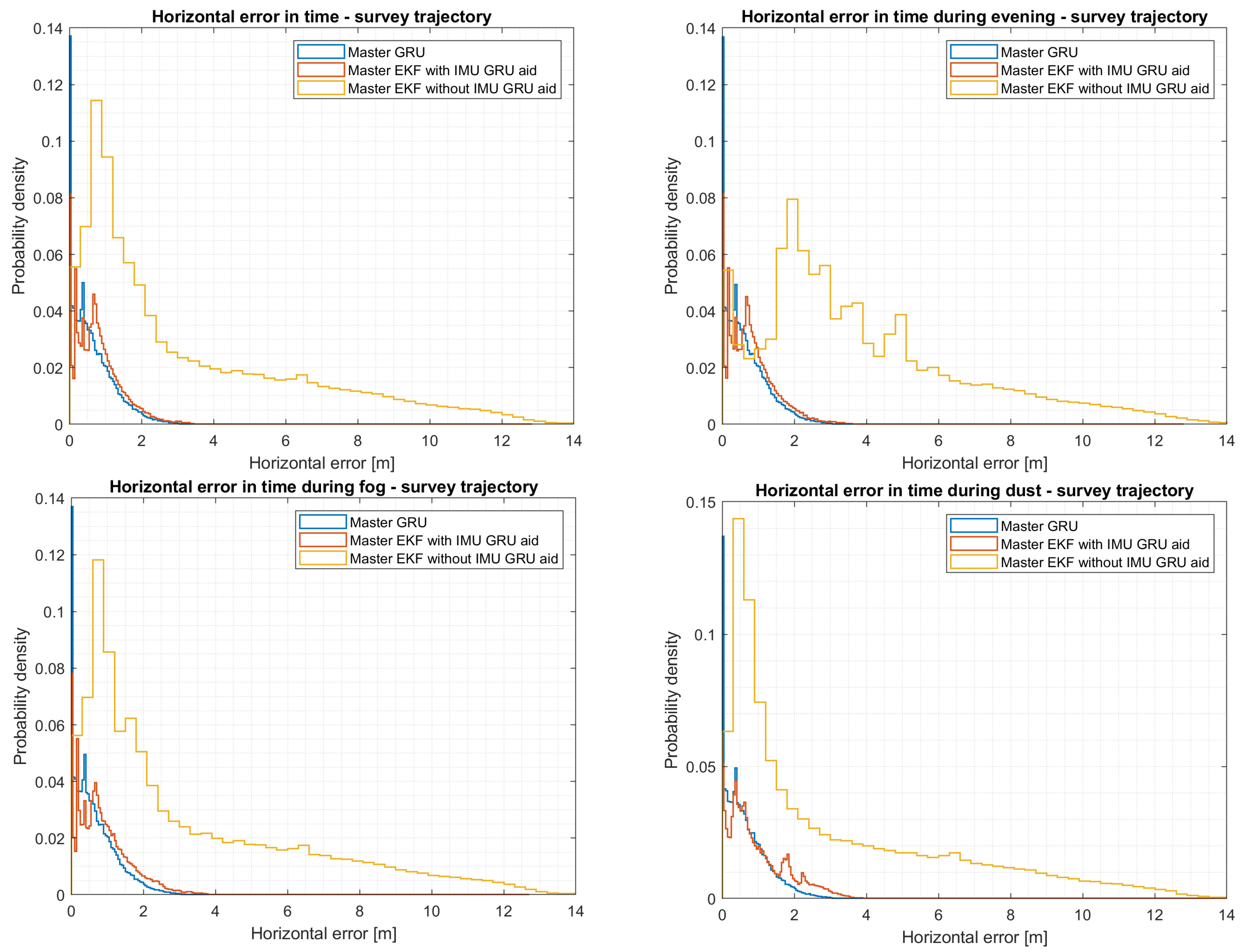
5.6. Evaluation of the Survey Trajectory
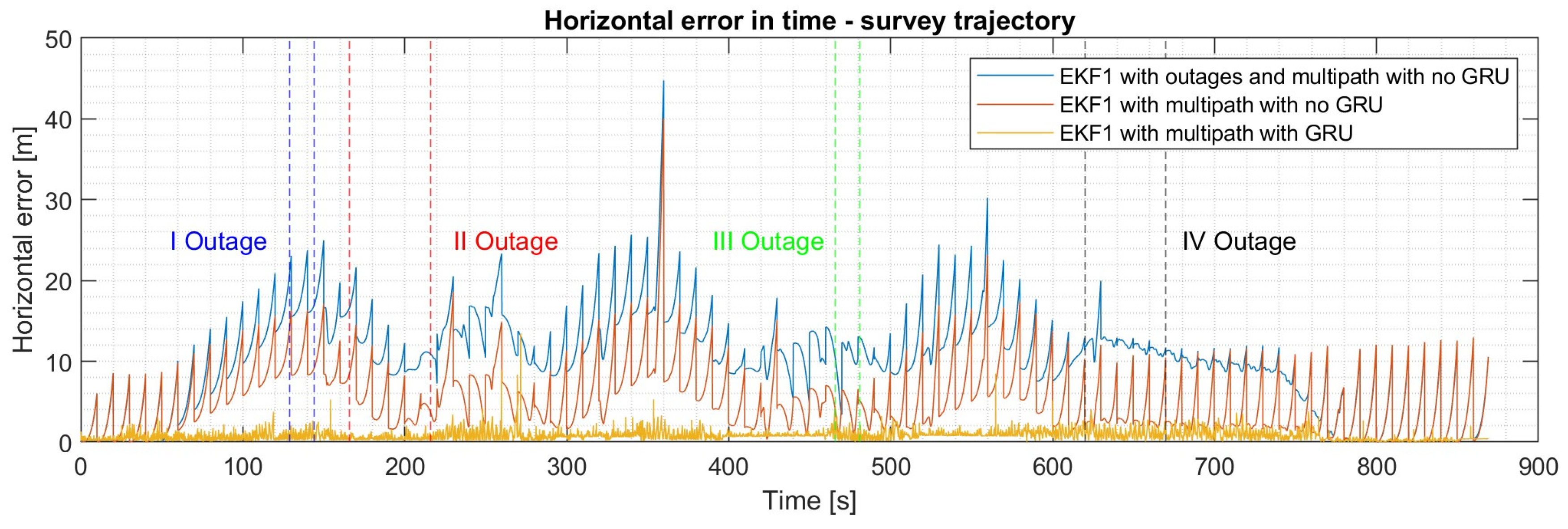
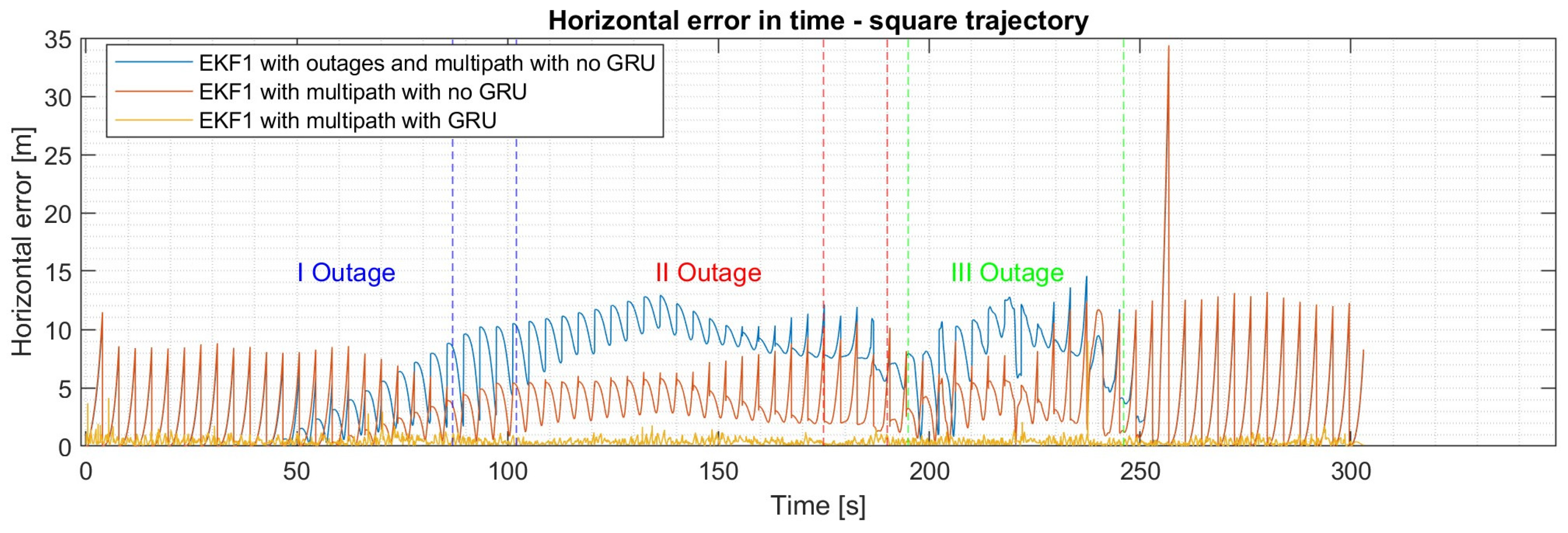
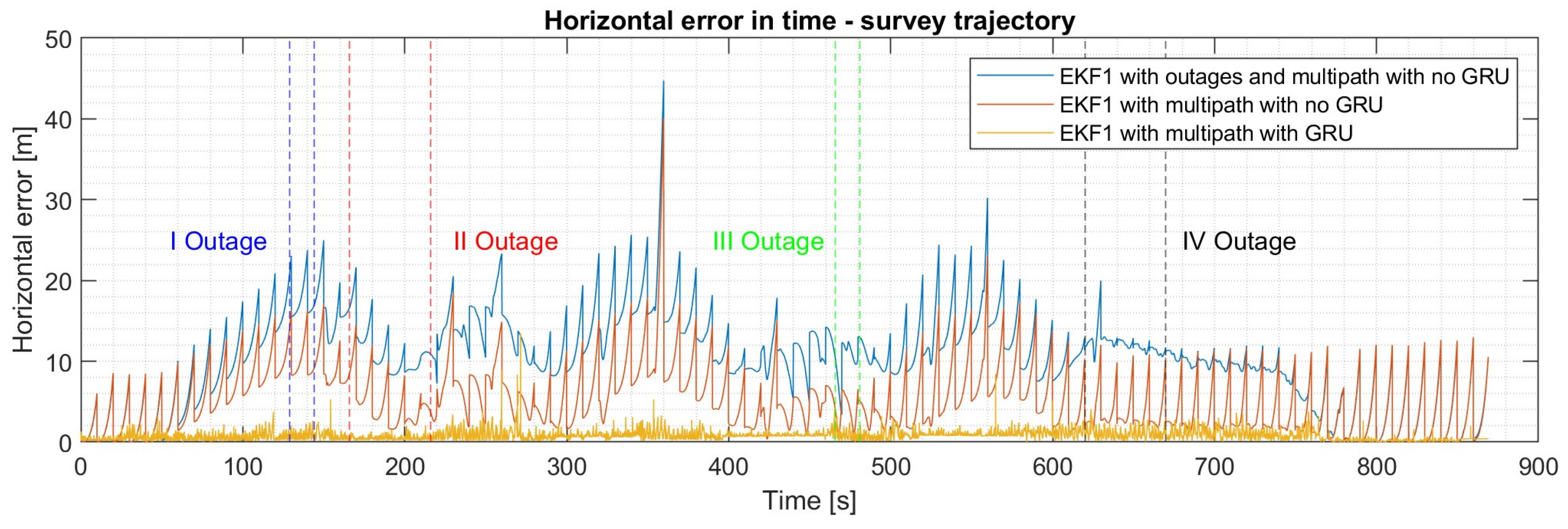
5.7. Evaluation of the Square and Survey Trajectories Considering GNSS Outages
5.8. Performance Comparison
6. Conclusions
- -
- A novel hybrid sensor fusion framework based on a federated approach was developed and tested in a loosely coupled set-up, integrating data from diverse sources, including a GNSS receiver, a MEMS IMU sensor, a monocular camera, and a MEMS barometer.
- -
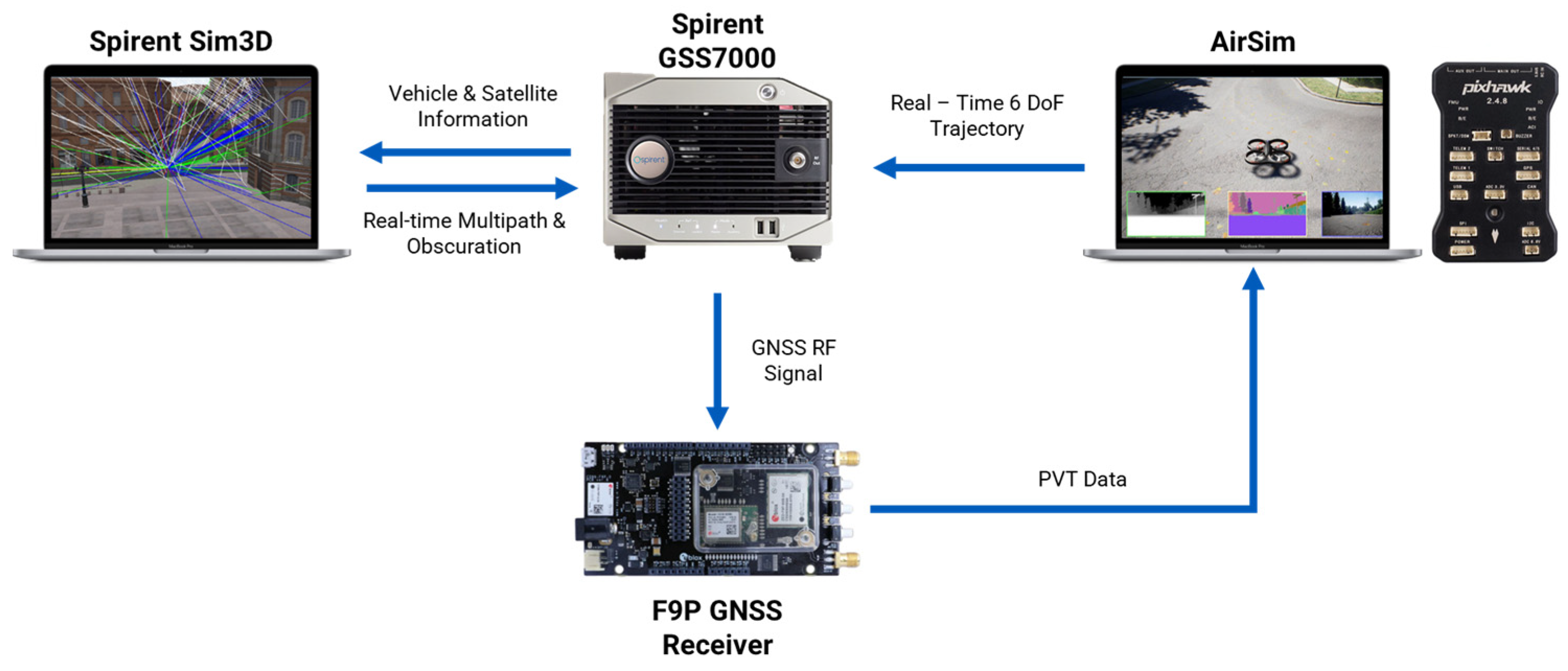
- A virtual environment was developed in UE, along with AirSim, Cesium, and photogrammetry data imported from Google Earth, allowing the authors to test and validate the effects of the VO algorithm over the hybrid fusion framework under different light and weather conditions. To further validate the framework, the hybrid FF architecture was compared to a classic FF framework. GNSS data were enhanced using the Spirent GSS7000 simulator with the OKTAL-SE Sim 3D software stack, introducing multipath during the data collection phase, and collected using a C009-F9P Ublox board. At the same time, IMU data were gathered using the Spirent GSS7000. In addition, GNSS outages were considered for both scenarios.
- -
- Based on the performance metrics presented in Table 2 and Table 3 for a square trajectory and Table 4 and Table 5 for a survey trajectory, it is evident that the corrections offered by the master GRU model surpass those of the master EKF filter. The master GRU model demonstrates the capability to achieve a sub-meter positioning error in terms of horizontal and vertical error for the square trajectory and below 2 m for the survey trajectory, under different weather and light conditions.
- -
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Coordinate Systems Definition and Transformations
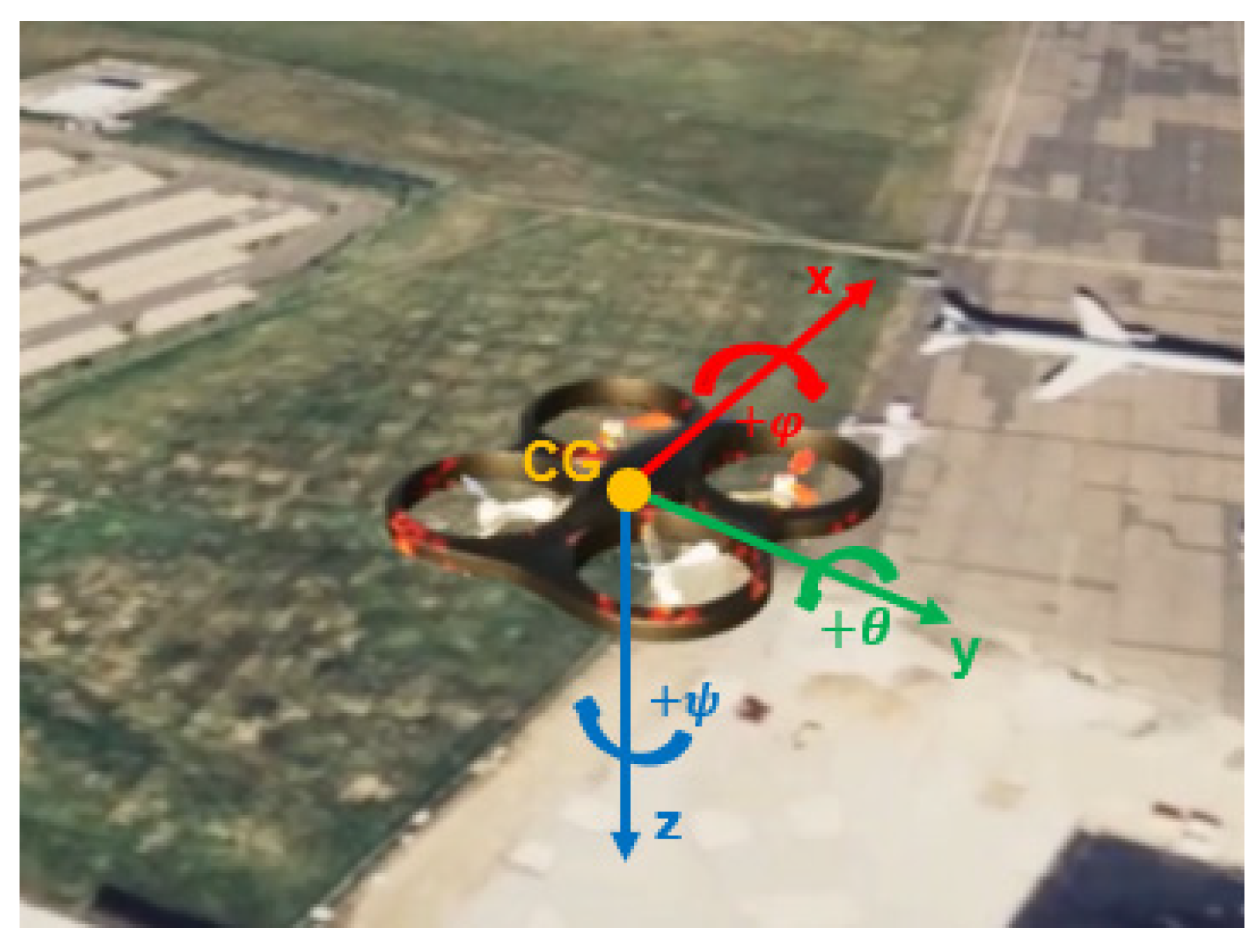
Appendix A.1. Body Frame
Appendix A.2. ECEF (Earth-Centered Earth-Fixed Frame)
Appendix A.3. Inertial Frame

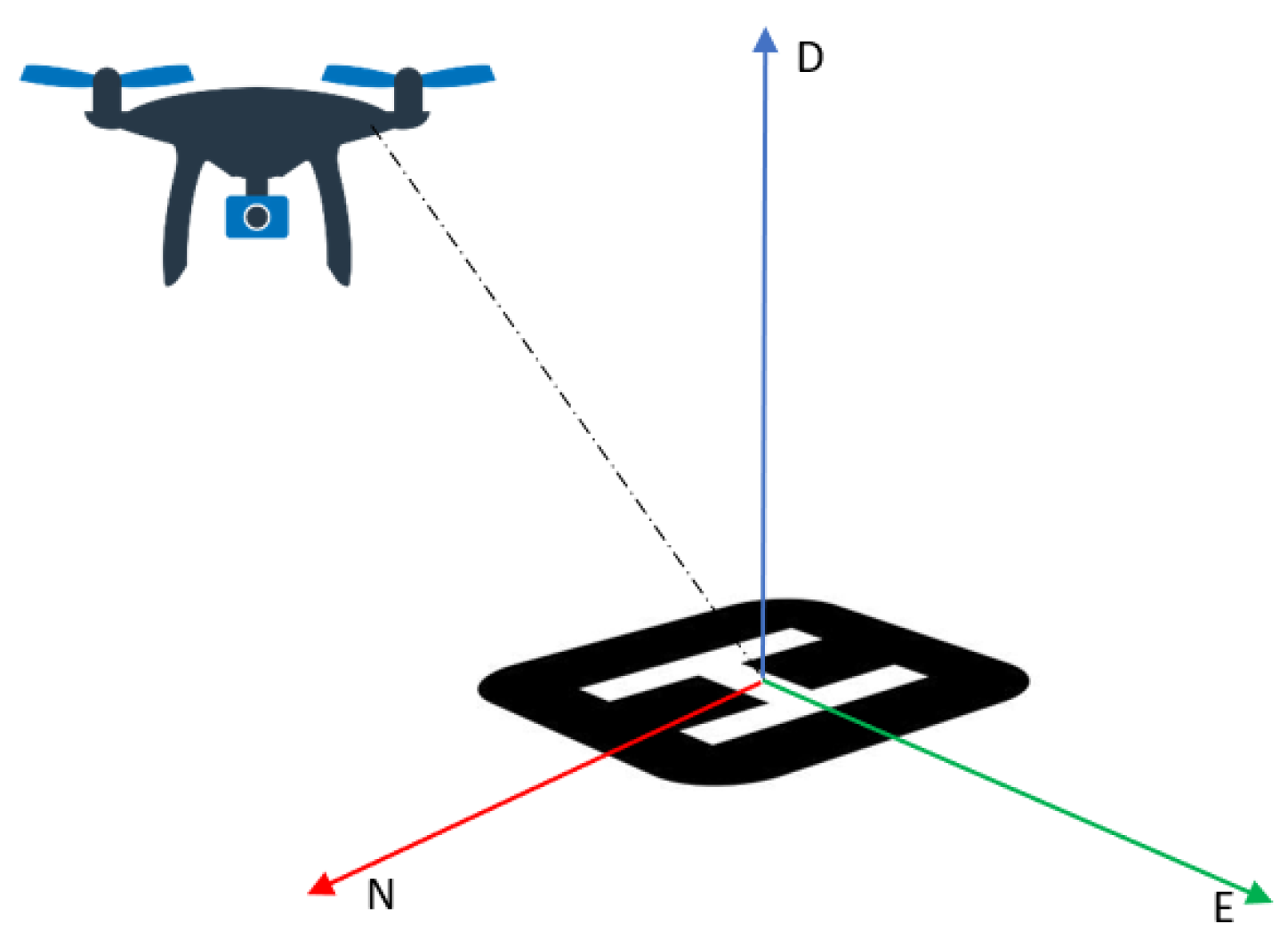
Appendix A.4. Navigation Frame
Appendix A.5. Conversion from WGS84 to ECEF
Appendix A.6. Conversion from ECEF to NED
Appendix A.7. Coordinate Frame Transformations
Appendix B. Metrics
References
- Janke, C.; de Haag, M.U. Implementation of European Drone Regulations—Status Quo and Assessment. J. Intell. Robot. Syst. Theory Appl. 2022, 106, 33. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Anderson, K.; DeBell, L.; Duffy, J.P. A UK Civil Aviation Authority (CAA)-approved operations manual for safe deployment of lightweight drones in research. Int. J. Remote Sens. 2017, 38, 2737–2744. [Google Scholar] [CrossRef]
- Lee, D.; Hess, D.J.; Heldeweg, M.A. Safety and privacy regulations for unmanned aerial vehicles: A multiple comparative analysis. Technol. Soc. 2022, 71, 102079. [Google Scholar] [CrossRef]
- Yang, B.; Hawthorne, T.L.; Torres, H.; Feinman, M. Using object-oriented classification for coastal management in the east central coast of Florida: A quantitative comparison between UAV, satellite, and aerial data. Drones 2019, 3, 60. [Google Scholar] [CrossRef]
- Guan, S.; Zhu, Z.; Wang, G. A Review on UAV-Based Remote Sensing Technologies for Construction and Civil Applications. Drones 2022, 6, 117. [Google Scholar] [CrossRef]
- Lewicka, O.; Specht, M.; Specht, C. Assessment of the Steering Precision of a UAV along the Flight Profiles Using a GNSS RTK Receiver. Remote Sens. 2022, 14, 6127. [Google Scholar] [CrossRef]
- Hemerly, M. MEMS IMU Stochastic Error Modelling. Syst. Sci. Control Eng. 2016, 5, 1–8. [Google Scholar] [CrossRef]
- Balamurugan, G.; Valarmathi, J.; Naidu, V.P.S. Survey on UAV navigation in GPS denied environments. In Proceedings of the International Conference on Signal Processing, Communication, Power and Embedded System, SCOPES 2016—Proceedings, Paralakhemundi, India, 3–5 October 2016; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2016; pp. 198–204. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Fraundorfer, F. Tutorial: Visual odometry. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Aqel, M.O.A.; Marhaban, M.H.; Saripan, M.I.; Ismail, N.B. Review of visual odometry: Types, approaches, challenges, and applications. SpringerPlus 2016, 5, 1897. [Google Scholar] [CrossRef]
- Das, S. Simultaneous Localization and Mapping (SLAM) using RTAB-MAP. arXiv 2018, arXiv:1809.02989. [Google Scholar]
- Servières, M.; Renaudin, V.; Dupuis, A.; Antigny, N. Visual and Visual-Inertial SLAM: State of the Art, Classification, and Experimental Benchmarking. J. Sens. 2021, 2021, 2054828. [Google Scholar] [CrossRef]
- Hening, S.; Ippolito, C.; Krishnakumar, K.; Stepanyan, V.; Teodorescu, M. 3D LiDAR SLAM integration with GPS/INS for UAVs in urban GPS-degraded environments. In Proceedings of the AIAA Information Systems-AIAA Infotech at Aerospace, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar] [CrossRef]
- Couturier, A.; Akhloufi, M.A. A review on absolute visual localization for UAV. Robot. Auton. Syst. 2021, 135, 103666. [Google Scholar] [CrossRef]
- Saranya, K.C.; Naidu, V.P.S.; Singhal, V.; Tanuja, B.M. Application of Vision Based techniques for UAV Position Estimation. In Proceedings of the 2016 International Conference on Research Advances in Integrated Navigation Systems (RAINS), Bangalore, India, 6–7 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Lawrence, P.J.; Berarducci, M.P. Comparison of Federated and Centralized Kalman Filters with Fault Detection Considerations. In Proceedings of the 1994 IEEE Position, Location and Navigation Symposium—PLANS’94, Las Vegas, NV, USA, 11–15 April 1994; pp. 703–710. [Google Scholar] [CrossRef]
- Carlson, N.A. Federated Square Root Filter for Decentralized Parallel Processes. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 517–525. [Google Scholar] [CrossRef]
- Quinchia, A.G.; Falco, G.; Falletti, E.; Dovis, F.; Ferrer, C. A comparison between different error modeling of MEMS applied to GPS/INS integrated systems. Sensors 2013, 13, 9549–9588. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Sun, X.; Li, Y.; Huai, J.; Hua, L.; Yang, X.; Cao, X.; Zhang, P.; Cao, Y.; Qi, L.; et al. Multi-sensor integrated navigation/positioning systems using data fusion: From analytics-based to learning-based approaches. Inf. Fusion 2023, 95, 62–90. [Google Scholar] [CrossRef]
- Dai, H.F.; Bian, H.W.; Wang, R.Y.; Ma, H. An INS/GNSS integrated navigation in GNSS denied environment using recurrent neural network. Def. Technol. 2020, 16, 334–340. [Google Scholar] [CrossRef]
- Guang, X.; Gao, Y.; Liu, P.; Li, G. IMU data and GPS position information direct fusion based on LSTM. Sensors 2021, 21, 2500. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Xu, P.; Xu, H.; Hsu, L.T. Prediction on the Urban GNSS Measurement Uncertainty Based on Deep Learning Networks with Long Short-Term Memory. IEEE Sens. J. 2021, 21, 20563–20577. [Google Scholar] [CrossRef]
- Negru, S.A.; Geragersian, P.; Petrunin, I.; Zolotas, A.; Grech, R. GNSS/INS/VO fusion using Gated Recurrent Unit in GNSS denied environments. In Proceedings of the AIAA Science and Technology Forum and Exposition, AIAA SciTech Forum 2023, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar] [CrossRef]
- Geragersian, P.; Petrunin, I.; Guo, W.; Grech, R. An INS/GNSS fusion architecture in GNSS denied environments using gated recurrent units. In Proceedings of the AIAA Science and Technology Forum and Exposition, AIAA SciTech Forum 2022, San Diego, CA, USA, 3–7 January 2022. [Google Scholar] [CrossRef]
- Al Bitar, N.; Gavrilov, A.; Khalaf, W. Artificial Intelligence Based Methods for Accuracy Improvement of Integrated Navigation Systems During GNSS Signal Outages: An Analytical Overview. Gyroscopy Navig. 2020, 11, 41–58. [Google Scholar] [CrossRef]
- Jwo, D.J.; Biswal, A.; Mir, I.A. Artificial Neural Networks for Navigation Systems: A Review of Recent Research. Appl. Sci. 2023, 13, 4475. [Google Scholar] [CrossRef]
- Jwo, D.J.; Chen, J.J. GPS/INS Navigation Filter Designs Using Neural Network with Optimization Techniques. In Advances in Natural Computation, Proceedings of the Second International Conference, ICNC 2006, Xi’an, China, 24–28 September 2006; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4221, pp. 461–471. [Google Scholar] [CrossRef]
- Jwo, D.-J.; Chang, C.-S.; Lin, C.-H. Neural Network Aided Adaptive Kalman Filtering for GPS Applications. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004; pp. 3686–3691. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, B. A Low-cost GPS/INS Integration Based on UKF and BP Neural Network. In Proceedings of the Fifth International Conference on Intelligent Control and Information Processing, Dalian, China, 18–20 August 2014; pp. 100–107. [Google Scholar] [CrossRef]
- Tang, Y.; Jiang, J.; Liu, J.; Yan, P.; Tao, Y.; Liu, J. A GRU and AKF-Based Hybrid Algorithm for Improving INS/GNSS Navigation Accuracy during GNSS Outage. Remote Sens. 2022, 14, 752. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, X.; Pang, C.; Li, T.; Zhang, L. Adaptive fault isolation and system reconfiguration method for GNSS/INS integration. IEEE Access 2020, 8, 17121–17133. [Google Scholar] [CrossRef]
- Wang, Y.; Huynh, G.; Williamson, C. Integration of Google Maps/Earth with microscale meteorology models and data visualization. Comput. Geosci. 2013, 61, 23–31. [Google Scholar] [CrossRef]
- Cai, G.; Chen, B.M.; Lee, T.H. Unmanned Rotorcraft Systems; Springer Science & Business Media: London, UK, 2011. [Google Scholar]
- Alkendi, Y.; Seneviratne, L.; Zweiri, Y. State of the Art in Vision-Based Localization Techniques for Autonomous Navigation Systems. IEEE Access 2021, 9, 76847–76874. [Google Scholar] [CrossRef]
- Sánchez, J.; Monzón, N.; Salgado, A. An analysis and implementation of the harris corner detector. Image Process. Line 2018, 8, 305–328. [Google Scholar] [CrossRef]
- Harris, C.; Stephens, M. A Combined Corner and Edge Detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 31 August–2 September 1998; pp. 23.1–23.6. [Google Scholar] [CrossRef]
- Features from Accelerated Segment Test (FAST) Deepak Geetha Viswanathan. Available online: https://api.semanticscholar.org/CorpusID:17031649 (accessed on 3 December 2023).
- Bay, H.; Ess, A.; Tuytelaars, T.; van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 564–2571. [Google Scholar] [CrossRef]
- Tareen, S.A.K.; Saleem, Z. A comparative analysis of SIFT, SURF, KAZE, AKAZE, ORB, and BRISK. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies: Invent, Innovate and Integrate for Socioeconomic Development, iCoMET 2018—Proceedings, Sukkur, Pakistan, 3–4 March 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Rosin, P.L. Measuring Corner Properties. Comput. Vis. Image Underst. 1999, 73, 291–307. [Google Scholar] [CrossRef]
- Muja, M.; Lowe, D. FLANN-Fast Library for Approximate Nearest Neighbors User Manual. Available online: https://www.fit.vutbr.cz/~ibarina/pub/VGE/reading/flann_manual-1.6.pdf (accessed on 3 December 2023).
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar] [CrossRef]
- Foley, J.D.; Fischler, M.A.; Bolles, R.C. Graphics and Image Processing Random Sample Consensus: A Paradigm for Model Fitting with Apphcatlons to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381395. [Google Scholar] [CrossRef]
- Helgesen, H.H.; Leira, F.S.; Bryne, T.H.; Albrektsen, S.M.; Johansen, A. Real-time Georeferencing of Thermal Images using Small Fixed-Wing UAVs in Maritime Environments. ISPRS J. Photogramm. Remote Sens. 2019, 154, 84–97. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Method for automatic georeferencing aerial remote sensing (RS) images from an unmanned aerial vehicle (UAV) platform. Biosyst. Eng. 2011, 108, 104–113. [Google Scholar] [CrossRef]
- George, A.; Koivumäki, N.; Hakala, T.; Suomalainen, J.; Honkavaara, E. Visual-Inertial Odometry Using High Flying Altitude Drone Datasets. Drones 2023, 7, 36. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2017, 34, 1004–1020. [Google Scholar] [CrossRef]
- Dai, J.; Hao, X.; Liu, S.; Ren, Z. Research on UAV Robust Adaptive Positioning Algorithm Based on IMU/GNSS/VO in Complex Scenes. Sensors 2022, 22, 2832. [Google Scholar] [CrossRef]
- Cai, G.; Chen, B.M.; Lee, T.H. Coordinate systems and transformations. In Unmanned Rotorcraft Systems; Advances in Industrial Control; Springer International Publishing: London, UK, 2011; pp. 23–34. ISBN 9780857296344. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Specifications | |||||
|---|---|---|---|---|---|
| Accelerometer | Gyroscope | U-Blox F9P GNSS Receiver Specification | |||
| Scaling factor (ppm) | 500 | Scaling factor (ppm) | 500 | Pseudo-range accuracy (m) | 3 |
| Bias (mg) | 0.1 | Bias (deg/h) | 0.001 | Pseudo-range rate accuracy (m/s) | 0.5 |
| ARW (m/s/sqrt(h)) | 0.003 | GRW (deg/sqrt(h)) | 0.003 | Update rate (Hz) | 1 |
| Update rate (Hz) | 100 | - | |||
| Toulouse—Afternoon | |||||||
|---|---|---|---|---|---|---|---|
| Position Source | 3D Position Error (95th Percentile) [m] | Horizontal Error (95th Percentile) [m] | Vertical Error (95th Percentile) [m] | RMSE N [m] | RMSE E [m] | RMSE D [m] | RMSE NED [m] |
| EKF1 IMU/GNSS (no GRU aid) | 10.40 | 9.76 | 3.5 | 4.49 | 1.35 | 3.36 | 5.77 |
| EKF2 IMU/VO/BO (no GRU aid) | 9.09 | 9.03 | 1.58 | 4.17 | 1.60 | 0.78 | 4.54 |
| Master EKF filter (no GRU aid) | 9.09 | 9.03 | 1.50 | 4.18 | 1.35 | 0.77 | 4.46 |
| EKF1 IMU/GNSS (with GRU aid) | 0.64 | 0.59 | 0.29 | 0.20 | 0.17 | 0.13 | 0.30 |
| EKF2 IMU/VO/BO (with GRU aid) | 4.57 | 4.57 | 1.48 | 1.32 | 1.45 | 0.76 | 2.11 |
| Master GRU filter (with GRU aid) | 0.58 | 0.54 | 0.27 | 0.16 | 0.14 | 0.12 | 0.25 |
| Master EKF filter (with GRU aid) | 0.76 | 0.73 | 0.29 | 0.21 | 0.21 | 0.13 | 0.33 |
| Toulouse—Evening | |||||||
| EKF2 IMU/VO/BO (no GRU aid) | 9.16 | 9.00 | 2.54 | 4.17 | 1.64 | 1.40 | 4.68 |
| Master EKF filter (no GRU aid) | 9.13 | 8.95 | 2.44 | 4.15 | 1.63 | 1.37 | 4.58 |
| EKF2 IMU/VO/BO (with GRU aid) | 5.07 | 4.92 | 1.63 | 1.52 | 1.58 | 1.00 | 2.35 |
| Master GRU filter (with GRU aid) | 0.59 | 0.54 | 0.27 | 0.16 | 0.14 | 0.12 | 0.25 |
| Master EKF filter (with GRU aid) | 0.77 | 0.75 | 0.29 | 0.22 | 0.21 | 0.13 | 0.34 |
| Toulouse—Fog | |||||||
|---|---|---|---|---|---|---|---|
| Position Source | 3D Positioning Error (95th Percentile) [m] | Horizontal Error (95th Percentile) [m] | Vertical Error (95th Percentile) [m] | RMSE N [m] | RMSE E [m] | RMSE D [m] | RMSE NED [m] |
| EKF2 IMU/VO/BO (no GRU aid) | 14.63 | 14.25 | 3.00 | 6.34 | 5.07 | 1.60 | 8.28 |
| Master EKF filter (no GRU aid) | 9.44 | 8.96 | 2.98 | 4.12 | 1.71 | 1.60 | 4.74 |
| EKF2 IMU/VO/BO (with GRU aid) | 8.63 | 8.63 | 3.25 | 2.80 | 2.53 | 1.48 | 4.07 |
| Master GRU filter (with GRU aid) | 0.61 | 0.57 | 0.28 | 0.17 | 0.17 | 2.30 | 0.27 |
| Master EKF filter (with GRU aid) | 0.89 | 0.87 | 0.29 | 0.25 | 0.24 | 0.13 | 0.37 |
| Toulouse—Dust | |||||||
| EKF2 IMU/VO/BO (no GRU aid) | 13.74 | 13.62 | 4.90 | 6.54 | 3.90 | 2.54 | 8.03 |
| Master EKF filter (no GRU aid) | 9.65 | 8.82 | 4.85 | 4.09 | 1.57 | 2.50 | 5.06 |
| EKF2 IMU/VO/BO (with GRU aid) | 6.00 | 5.51 | 2.50 | 1.77 | 1.61 | 1.45 | 2.80 |
| Master GRU filter (with GRU aid) | 0.60 | 0.55 | 0.27 | 0.16 | 3.07 | 0.12 | 0.25 |
| Master EKF filter (with GRU aid) | 0.79 | 0.77 | 0.29 | 0.22 | 0.22 | 0.13 | 0.34 |
| Toulouse—Afternoon | |||||||
|---|---|---|---|---|---|---|---|
| Position Source | 3D Positioning Error (95th Percentile) [m] | Horizontal Error (95th Percentile) [m] | Vertical Error (95th Percentile) [m] | RMSE N [m] | RMSE E [m] | RMSE D [m] | RMSE NED [m] |
| EKF1 IMU/GNSS (no GRU aid) | 11.37 | 10.19 | 4.05 | 1.77 | 4.52 | 3.77 | 6.15 |
| EKF2 IMU/VO (no GRU aid) | 22.92 | 22.90 | 5.00 | 9.38 | 7.36 | 1.60 | 12.03 |
| Master EKF filter (no GRU aid) | 10.44 | 10.19 | 2.11 | 1.94 | 4.48 | 1.80 | 5.21 |
| EKF1 IMU/GNSS (with GRU aid) | 1.86 | 1.85 | 0.26 | 0.76 | 0.49 | 0.16 | 0.92 |
| EKF2 IMU/VO (with GRU aid) | 11.74 | 11.74 | 4.10 | 4.79 | 4.63 | 1.27 | 6.79 |
| Master GRU filter (with GRU aid) | 1.72 | 1.72 | 0.28 | 0.67 | 0.44 | 0.12 | 0.81 |
| Master EKF filter (with GRU aid) | 1.93 | 1.93 | 0.26 | 0.77 | 0.53 | 0.16 | 0.95 |
| Toulouse—Evening | |||||||
| EKF2 IMU/VO (no GRU aid) | 23.43 | 23.43 | 5.53 | 10.00 | 7.55 | 1.64 | 12.64 |
| Master EKF filter (no GRU aid) | 10.57 | 10.40 | 5.31 | 2.71 | 4.48 | 1.57 | 5.47 |
| EKF2 IMU/VO (with GRU aid) | 13.38 | 13.32 | 3.99 | 5.27 | 5.46 | 1.73 | 7.79 |
| Master GRU filter (with GRU aid) | 1.73 | 1.73 | 0.28 | 0.67 | 0.16 | 0.12 | 0.82 |
| Master EKF filter (with GRU aid) | 1.97 | 1.96 | 0.26 | 0.78 | 0.54 | 0.16 | 0.97 |
| Toulouse—Fog | |||||||
|---|---|---|---|---|---|---|---|
| Position Source | 3D Positioning Error (95th Percentile) [m] | Horizontal Error (95th Percentile) [m] | Vertical Error (95th Percentile) [m] | RMSE N [m] | RMSE E [m] | RMSE D [m] | RMSE NED [m] |
| EKF2 IMU/VO (no GRU aid) | 23.76 | 23.76 | 10.44 | 9.10 | 7.95 | 3.01 | 12.50 |
| Master EKF filter (no GRU aid) | 11.36 | 10.21 | 10.31 | 1.80 | 4.52 | 3.10 | 5.77 |
| EKF2 IMU/VO (with GRU aid) | 25.22 | 25.19 | 8.34 | 10.39 | 9.92 | 2.80 | 14.64 |
| Master GRU filter (with GRU aid) | 1.74 | 1.73 | 0.29 | 0.67 | 0.46 | 0.13 | 0.83 |
| Master EKF filter (with GRU aid) | 2.22 | 2.21 | 0.26 | 1.07 | 0.87 | 0.60 | 1.07 |
| Toulouse—Dust | |||||||
| EKF2 IMU/VO (no GRU aid) | 36.78 | 36.75 | 8.04 | 14.83 | 10.24 | 2.77 | 18.24 |
| Master EKF filter (no GRU aid) | 11.32 | 10.18 | 3.97 | 1.84 | 4.5 | 3.71 | 6.12 |
| EKF2 IMU/VO (with GRU aid) | 22.51 | 22.12 | 5.95 | 8.73 | 9.12 | 4.08 | 13.27 |
| Master GRU filter (with GRU aid) | 1.74 | 1.73 | 0.29 | 0.67 | 0.46 | 0.13 | 0.83 |
| Master EKF filter (with GRU aid) | 2.53 | 2.53 | 0.26 | 10.03 | 0.56 | 0.16 | 1.18 |
| Toulouse—Afternoon | |||||||
|---|---|---|---|---|---|---|---|
| Position Source | 3D Position Error (95th Percentile) [m] | Horizontal Error (95th Percentile) [m] | Vertical Error (95th Percentile) [m] | RMSE N [m] | RMSE E [m] | RMSE D [m] | RMSE NED [m] |
| EKF1 IMU/GNSS (no GRU aid) | 15.81 | 12.16 | 11.73 | 5.19 | 5.51 | 7.22 | 13.92 |
| Master EKF filter (no GRU aid) | 9.48 | 9.44 | 1.52 | 4.03 | 2.23 | 0.82 | 6.01 |
| EKF1 IMU/GNSS (with GRU aid) | 0.98 | 0.82 | 0.59 | 0.34 | 0.33 | 0.34 | 1.01 |
| Master GRU filter (with GRU aid) | 0.60 | 0.55 | 0.27 | 0.17 | 0.18 | 0.12 | 0.28 |
| Master EKF filter (with GRU aid) | 0.80 | 0.75 | 0.31 | 0.23 | 0.23 | 0.17 | 0.37 |
| Toulouse—Evening | |||||||
| Master EKF filter (no GRU aid) | 9.81 | 9.59 | 2.74 | 4.43 | 4.04 | 1.49 | 6.18 |
| Master GRU filter (with GRU aid) | 0.60 | 0.56 | 0.28 | 0.18 | 0.17 | 0.15 | 0.29 |
| Master EKF filter (with GRU aid) | 0.81 | 0.76 | 0.31 | 0.23 | 0.23 | 0.17 | 0.37 |
| Toulouse—Fog | |||||||
| Master EKF filter (no GRU aid) | 19.66 | 19.44 | 2.94 | 8.29 | 7.59 | 1.65 | 11.36 |
| Master GRU filter (with GRU aid) | 0.86 | 0.81 | 0.43 | 0.28 | 0.17 | 0.16 | 0.37 |
| Master EKF filter (with GRU aid) | 0.92 | 0.88 | 0.31 | 0.25 | 0.26 | 0.17 | 0.40 |
| Toulouse—Dust | |||||||
| Master EKF filter (no GRU aid) | 19.29 | 19.07 | 2.94 | 8.14 | 7.40 | 1.65 | 11.12 |
| Master GRU filter (with GRU aid) | 0.62 | 0.58 | 0.28 | 0.19 | 0.17 | 0.15 | 0.30 |
| Master EKF filter (with GRU aid) | 0.73 | 0.83 | 0.31 | 0.23 | 0.23 | 0.17 | 0.37 |
| Toulouse—Afternoon | |||||||
|---|---|---|---|---|---|---|---|
| Position Source | 3D Position Error (95th Percentile) [m] | Horizontal Error (95th Percentile) [m] | Vertical Error (95th Percentile) [m] | RMSE N [m] | RMSE E [m] | RMSE D [m] | RMSE NED [m] |
| EKF1 IMU/GNSS (no GRU aid) | 17.83 | 17.83 | 13.16 | 6.34 | 8.91 | 10.85 | 15.41 |
| Master EKF filter (no GRU aid) | 17.82 | 17.78 | 4.99 | 6.35 | 8.88 | 1.59 | 11.03 |
| EKF1 IMU/GNSS with GRU aid | 3.39 | 3.35 | 0.60 | 1.71 | 0.83 | 0.49 | 1.98 |
| Master GRU filter (with GRU aid) | 1.77 | 1.77 | 0.27 | 0.49 | 0.69 | 0.13 | 0.86 |
| Master EKF filter (with GRU aid) | 3.42 | 3.37 | 0.60 | 1.68 | 0.87 | 0.49 | 1.96 |
| Toulouse—Evening | |||||||
| Master EKF filter (no GRU aid) | 17.79 | 17.75 | 5.51 | 6.38 | 8.85 | 1.63 | 11.03 |
| Master GRU filter (with GRU aid) | 1.77 | 1.76 | 0.27 | 0.49 | 0.69 | 0.13 | 0.86 |
| Master EKF filter (with GRU aid) | 3.43 | 3.39 | 0.60 | 1.69 | 0.87 | 0.49 | 1.96 |
| Toulouse—Fog | |||||||
| Master EKF filter (no GRU aid) | 17.87 | 17.74 | 10.64 | 6.35 | 8.85 | 3.20 | 11.36 |
| Master GRU filter (with GRU aid) | 1.76 | 1.76 | 0.27 | 0.49 | 0.69 | 0.13 | 0.86 |
| Master EKF filter (with GRU aid) | 3.50 | 3.46 | 0.60 | 1.69 | 0.89 | 0.49 | 1.98 |
| Toulouse—Dust | |||||||
| Master EKF filter (no GRU aid) | 18.01 | 17.81 | 8.02 | 6.50 | 8.89 | 2.77 | 11.36 |
| Master GRU filter (with GRU aid) | 1.76 | 1.76 | 0.27 | 0.49 | 0.69 | 0.13 | 0.86 |
| Master EKF filter (with GRU aid) | 3.48 | 3.44 | 0.60 | 1.69 | 0.89 | 0.49 | 1.97 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Negru, S.A.; Geragersian, P.; Petrunin, I.; Guo, W. Resilient Multi-Sensor UAV Navigation with a Hybrid Federated Fusion Architecture. Sensors 2024, 24, 981. https://doi.org/10.3390/s24030981
Negru SA, Geragersian P, Petrunin I, Guo W. Resilient Multi-Sensor UAV Navigation with a Hybrid Federated Fusion Architecture. Sensors. 2024; 24(3):981. https://doi.org/10.3390/s24030981
Chicago/Turabian StyleNegru, Sorin Andrei, Patrick Geragersian, Ivan Petrunin, and Weisi Guo. 2024. "Resilient Multi-Sensor UAV Navigation with a Hybrid Federated Fusion Architecture" Sensors 24, no. 3: 981. https://doi.org/10.3390/s24030981
APA StyleNegru, S. A., Geragersian, P., Petrunin, I., & Guo, W. (2024). Resilient Multi-Sensor UAV Navigation with a Hybrid Federated Fusion Architecture. Sensors, 24(3), 981. https://doi.org/10.3390/s24030981