

Omnidirectional Sensor Design for Distributed Laser Measurement Systems
Abstract
1. Introduction
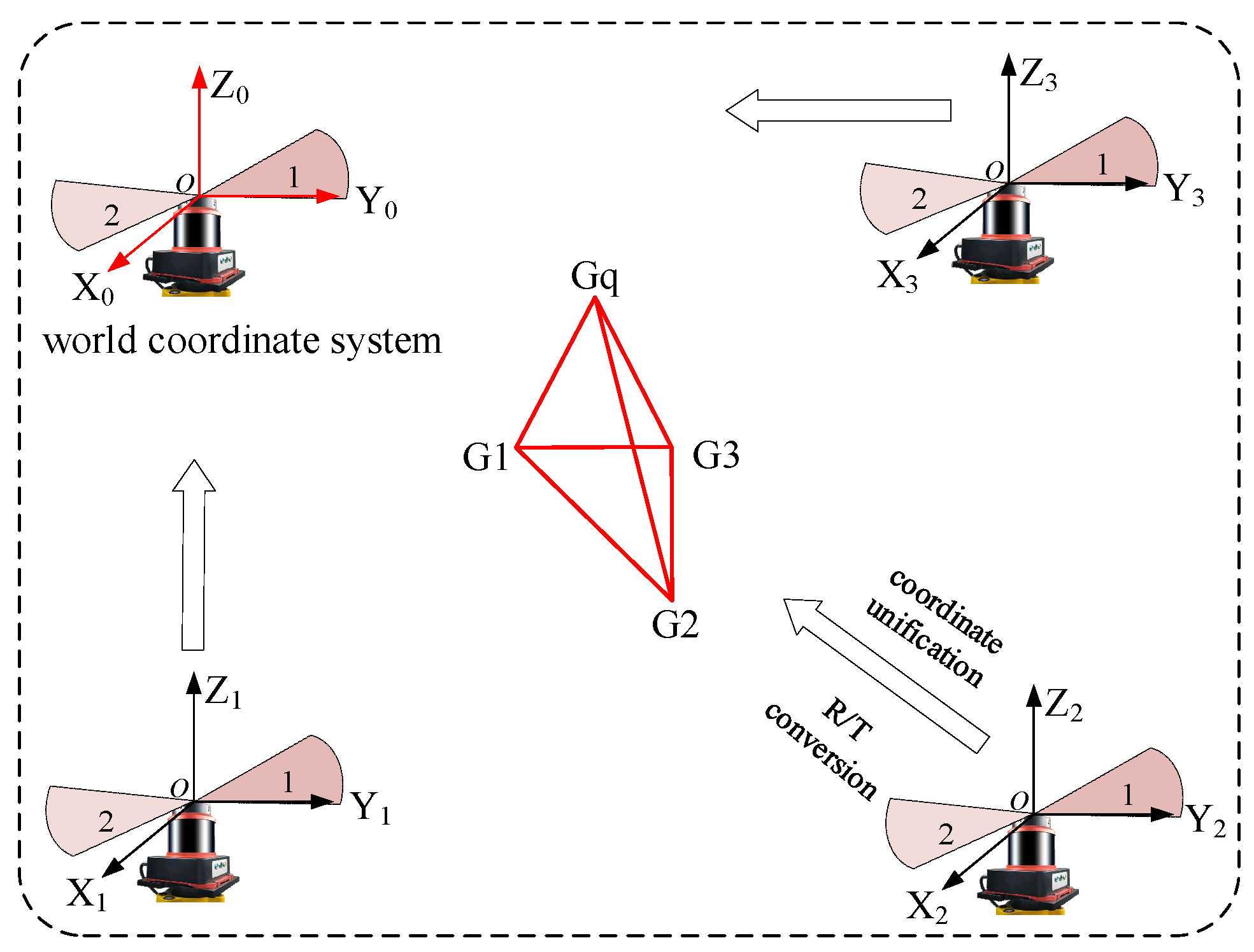
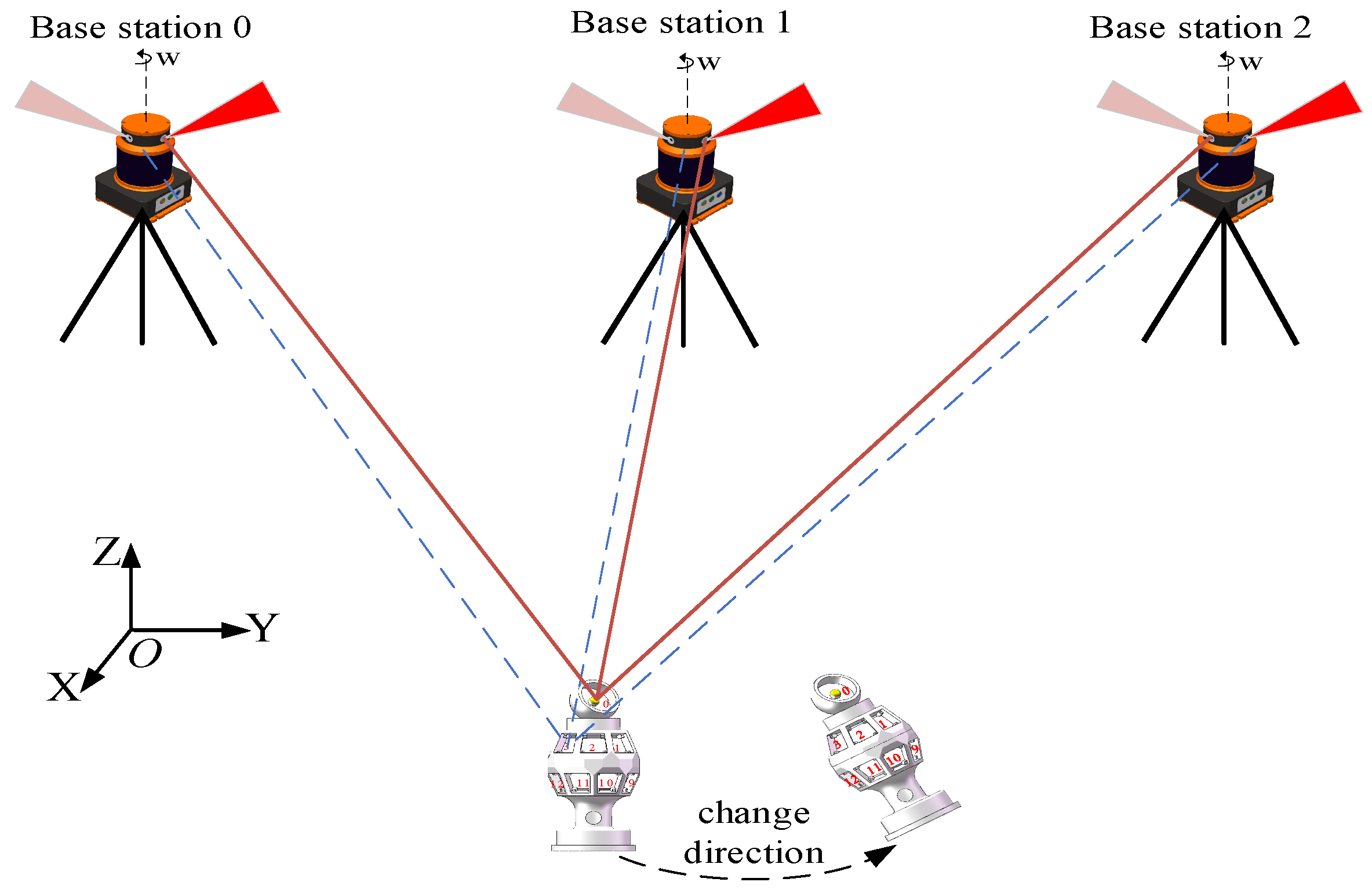
2. Principle of Omnidirectional Sensor Measurement
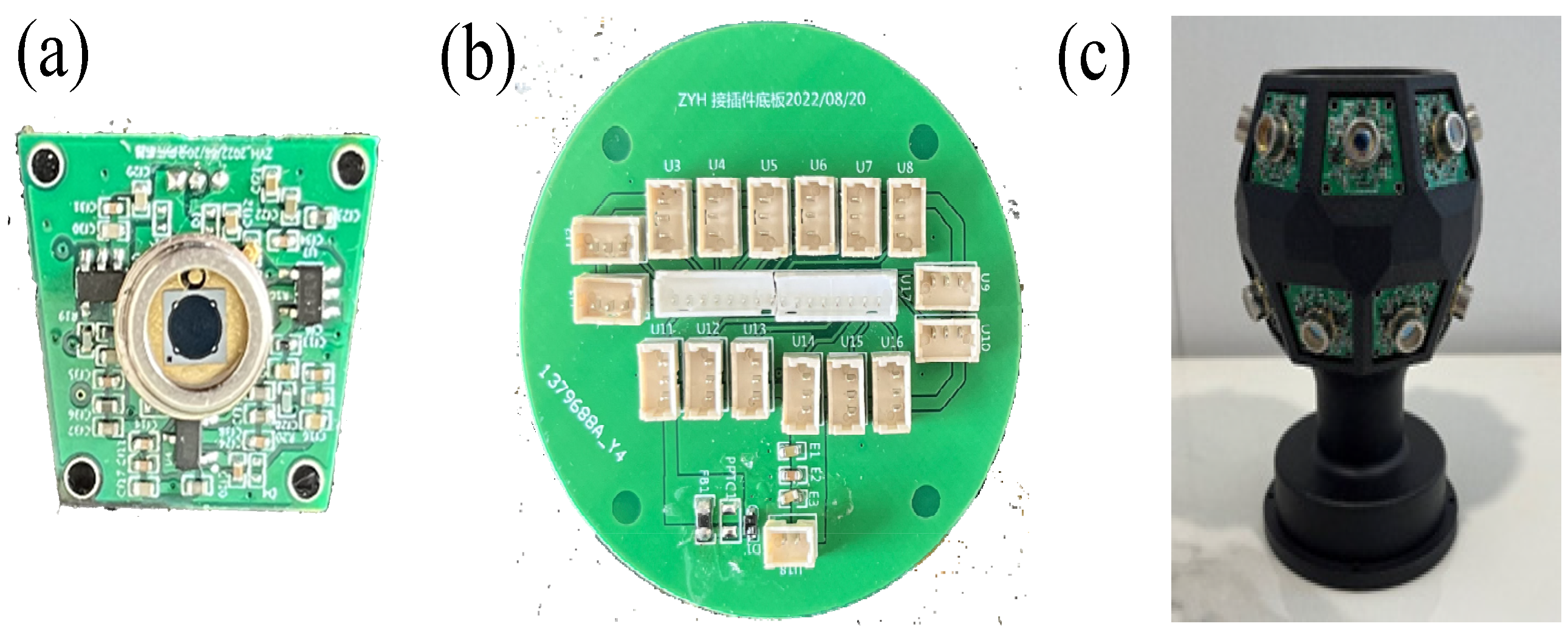
3. Design of Omnidirectional Sensor
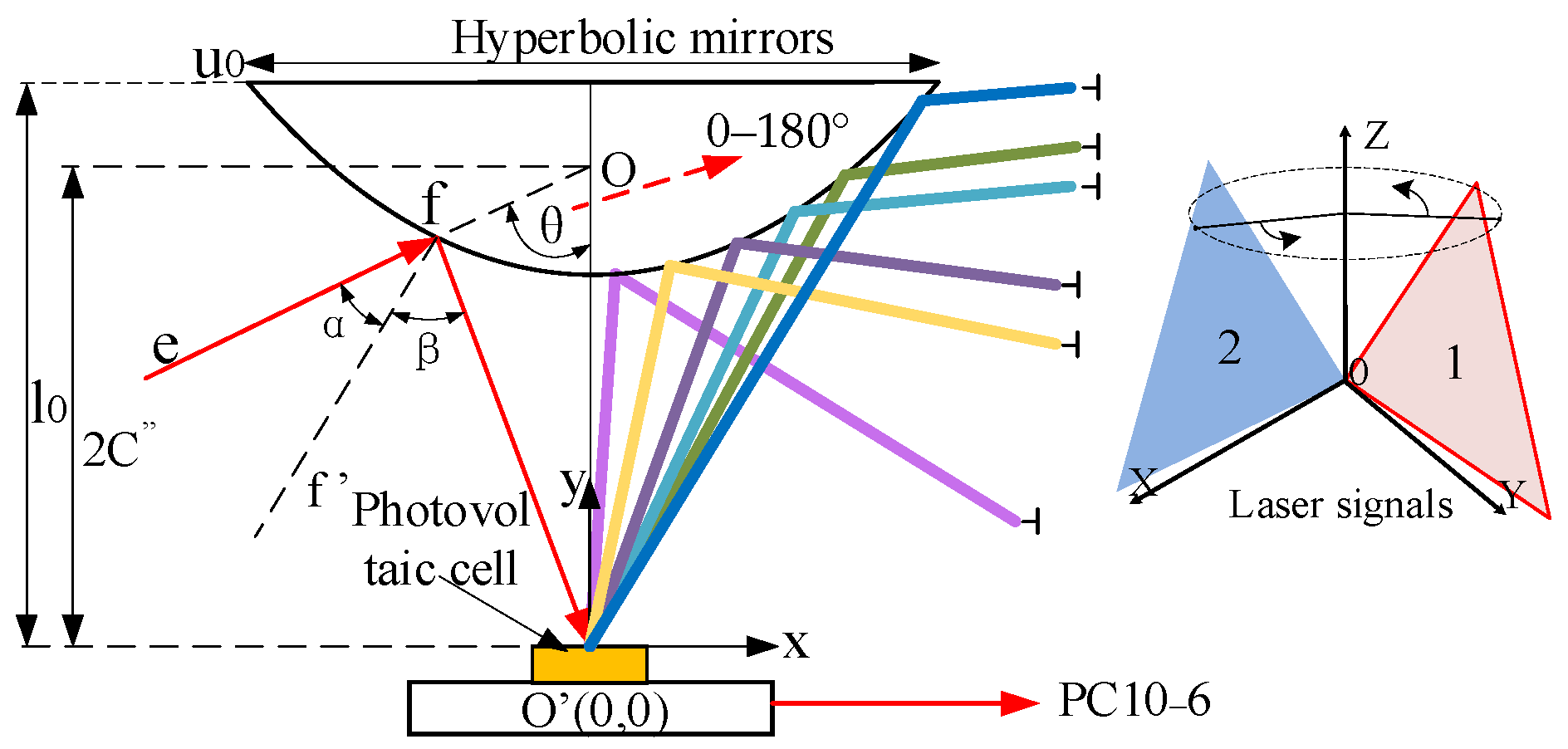
3.1. Optical Path Analysis
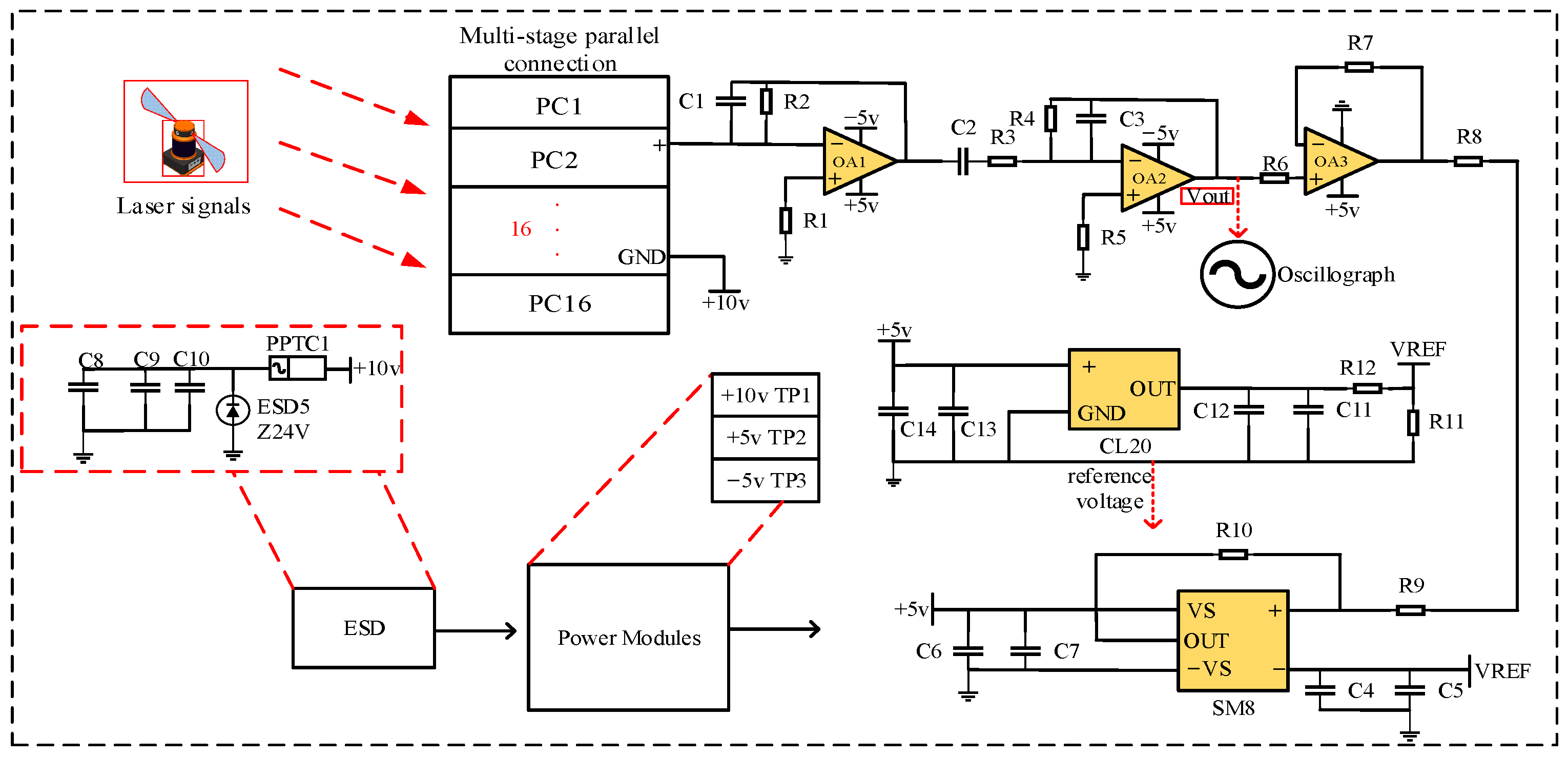
3.2. Photoelectric Conversion Circuit Design
4. Experiment and Discussion
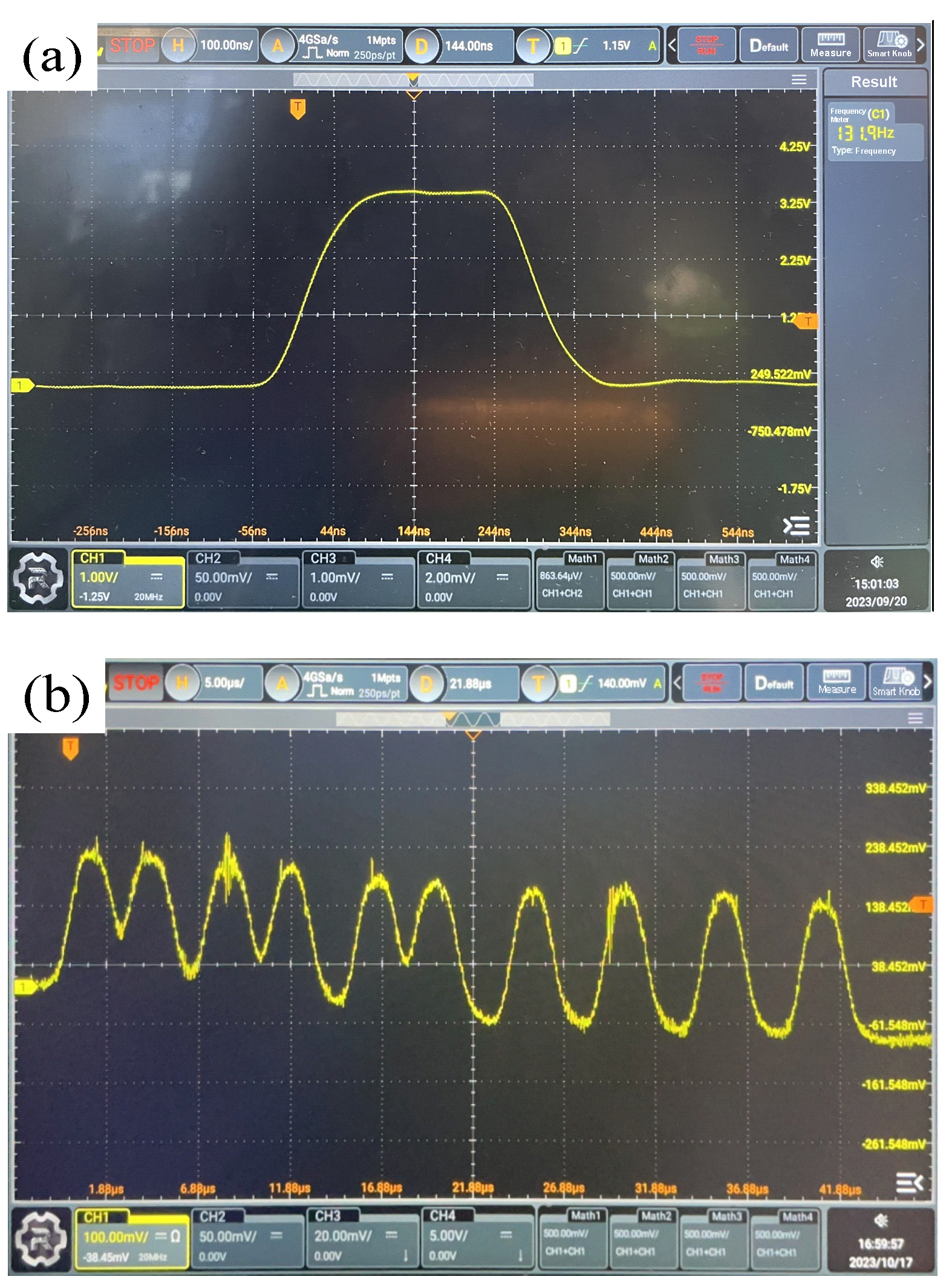
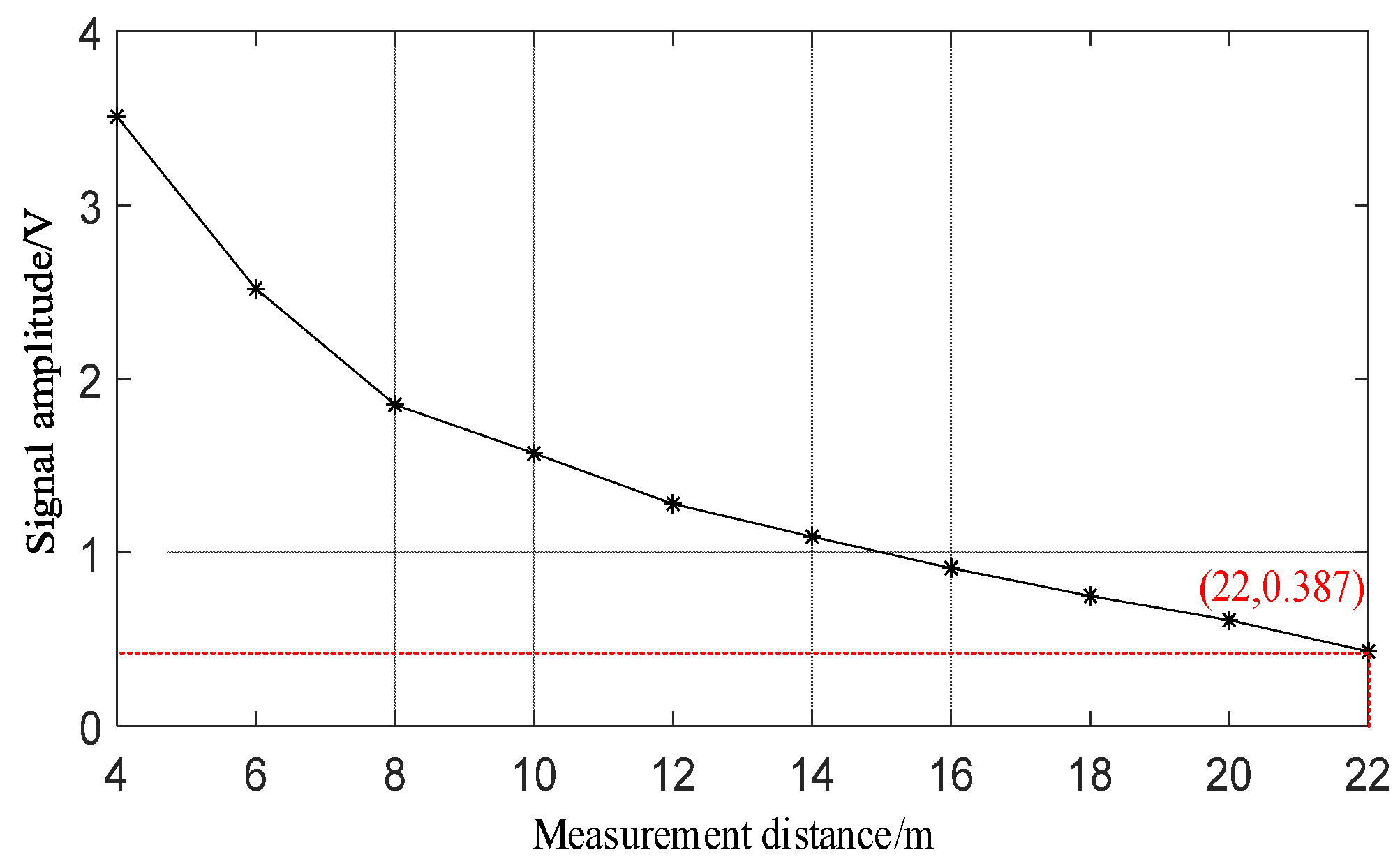
4.1. Signal Reception Range Experiment
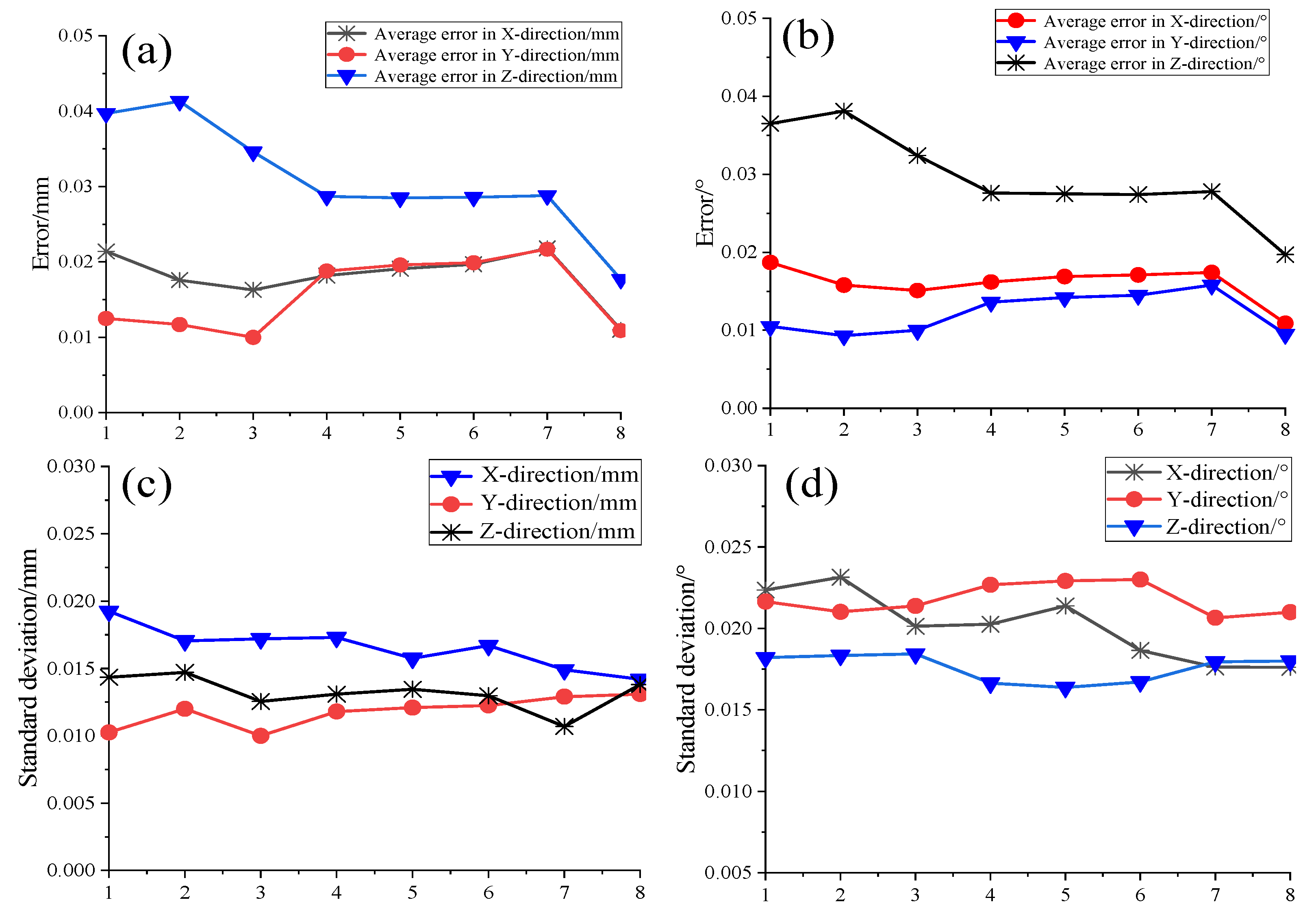
4.2. Measurement Accuracy Experiment
4.3. Experimental Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Norman, A.R.; Schönberg, A.; Gorlach, I.A.; Schmitt, R. Validation of iGPS as an external measurement system for cooperative robot positioning. Int. J. Adv. Manuf. Technol. 2012, 64, 427–446. [Google Scholar] [CrossRef]
- Wang, S.; Chen, X.; Ding, G.; Li, Y.; Xu, W.; Zhao, Q.; Gong, Y.; Song, Q. A lightweight localization strategy for lidar-guided autonomous robots with artificial landmarks. Sensors 2021, 21, 4479. [Google Scholar] [CrossRef]
- Sun, K.; Huang, W.; Meng, S.; Xiao, Y.; Wang, M.T.; Xiao, Z. Implementation of a novel scan localization system for wireless sensor networks. J. Laser Appl. 2013, 25, 012004. [Google Scholar] [CrossRef]
- Shi, S.; Yang, L.; Lin, J.; Long, C.; Deng, R.; Zhang, Z.; Zhu, J. Dynamic measurement error modeling and analysis in a photoelectric scanning measurement network. Appl. Sci. 2018, 9, 95. [Google Scholar] [CrossRef]
- Lee, S.H. An omnidirectional receiver for visible light communication using a flexible solar cell. J. Sens. Sci. Technol. 2017, 26, 173–178. [Google Scholar] [CrossRef][Green Version]
- Urquhart, K. Photoelectric laser sensors. Manuf. Autom. Mach. Dessig Syst. Technol. 2021, 36, 21. [Google Scholar]
- Geetla, T.; Batta, R.; Blatt, A.; Flanigan, M.; Majka, K. Optimal placement of omnidirectional sensors in a transportation network for effective emergency response and crash characterization. Transp. Res. Part C Emerg. Technol. 2014, 45, 64–82. [Google Scholar] [CrossRef]
- Liang, Y.J.; Mu, L.L.; Yu, L.X.T. Combined optical fiber interferometric sensors for the detection of acoustic emission. Optoelectron. Lett. 2018, 26, 21–24. [Google Scholar] [CrossRef]
- Yang, G.; Jiang, T.; Hou, L.; Tang, Y.; Zhang, J. A control system of plc’s stereo garage based on photoelectric sensor. Int. J. Online Eng. 2017, 13, 246–251. [Google Scholar] [CrossRef]
- Zhou, N.; An, Z.Y.; Li, L.J.; Zhu, Y. iGPS measurement network multi-station arrangement design. Appl. Mech. Mater. 2014, 443, 223–227. [Google Scholar] [CrossRef]
- Xue, B.; Zhu, J.; Yang, L.; Zhao, Z.; Ye, S. The application of the wMPS in airplane level measurement. Opto-Electron. Eng. 2017, 41, 22–26. [Google Scholar]
- Fang, R.; Strimbu, B.M.; Fang, R.; Strimbu, B.M. Stem measurements and taper modeling using photogrammetric point clouds. Remote Sens. 2017, 9, 716. [Google Scholar] [CrossRef]
- Wang, Q.; Zhu, J.; Xue, B.; Zhao, Z. Techniques of scanning optical surface fitting and evaluation in wMPS. Opto-Electron. Eng. 2016, 40, 84–90. [Google Scholar]
- Zhi, X.; Ji-Gui, Z.; Bin, X.; Zi-Yue, Z. Typical deployments of workspace measurement and positioning system. Opt. Precis. Eng. 2013, 21, 2354–2363. [Google Scholar]
- Xiong, C.; Bai, H. Calibration of large-scale spatial positioning systems based on photoelectric scanning angle measurements and spatial resection in conjunction with an external receiver array. Appl. Sci. 2020, 10, 925. [Google Scholar] [CrossRef]
- Fan, Y.J.; Xu, H.T.; He, Z.Y. Smoothing the output power of a wind energy conversion system using a hybrid nonlinear pitch angle controller. Energy Explor. Exploit. 2022, 40, 539–553. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Model/Value |
|---|---|
| PC | PC10-6 |
| OA | OP065, OP084, OP083 |
| TP | TPS4701, TPS3301 |
| SM8 | SGM874 |
| CL20 | CLREF2018 |
| R1, R2, R3, R4, R5, R6, R7, R8, R9, R10, R11 | 24 kΩ, 1.5 kΩ, 33 kΩ, 1.7 kΩ, 100Ω, 75 kΩ, 60 Ω, 10 kΩ, 75 Ω, 75 10 ppm, 75 10 ppm |
| C1, C2, C3, C4, C5, C6, C7, C8, C9, C10, C11, C12, C13, C14 | 1.5 pF, 470 nF, 1 pF, 10 uF/5 V, 0.1 uF/50 V, 10 uF/10 V, 0.1 uF/50 V, 10 uF/16 V, 10 uF/50 V, 0.1 uF/50 V, 22 uF/16 V, 0.1 uF/50 V |
| Point | O-S/mv | F-S/mv |
|---|---|---|
| 4 | 2036.46 | 0 |
| 5 | 2476.41 | 16.65 |
| 10 | 3983.24 | 0 |
| 11 | 3214.93 | 0 |
| 34 | 2827.80 | 32.52 |
| 35 | 3106.00 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, F.; Liu, Q.; Zhi, Y.; Shang, T. Omnidirectional Sensor Design for Distributed Laser Measurement Systems. Sensors 2024, 24, 961. https://doi.org/10.3390/s24030961
Liu F, Liu Q, Zhi Y, Shang T. Omnidirectional Sensor Design for Distributed Laser Measurement Systems. Sensors. 2024; 24(3):961. https://doi.org/10.3390/s24030961
Chicago/Turabian StyleLiu, Fei, Qing Liu, Yaohui Zhi, and Ting Shang. 2024. "Omnidirectional Sensor Design for Distributed Laser Measurement Systems" Sensors 24, no. 3: 961. https://doi.org/10.3390/s24030961
APA StyleLiu, F., Liu, Q., Zhi, Y., & Shang, T. (2024). Omnidirectional Sensor Design for Distributed Laser Measurement Systems. Sensors, 24(3), 961. https://doi.org/10.3390/s24030961