1. Introduction
Due to the poor contact and corrosion of contact points, a series arc fault (SAF) may occur in the frequency converter loop of an industrial motor [
1]. When mechanical faults such as rotor imbalances, air gap dynamic eccentricities, or the poor processing and assembly of rolling bearings, occur in the motor, a mechanical vibration of a specific frequency will be generated. The mechanical vibration will aggravate the SAF at the electrical contact point with poor contact. Whether there is a mechanical vibration fault in the motor, whether the arc occurs in the front end of the frequency converter or the back end of the frequency converter, and whether the motor is running with the frequency converter will affect the signal features of the SAF. In addition, the SAF itself has concealment, randomness and complexity, which will aggravate the difficulty of arc fault detection under mechanical vibration conditions, resulting in the SAF becoming one of the most difficult types of line faults to detect [
2]. Therefore, based on the loop current, the arc fault detection model of the motor frequency converter load under vibration conditions is established for judging whether the arc fault occurs and for preliminarily judging the type of motor fault, which is of a certain significance for improving the power supply safety performance of an industrial motor frequency converter loop.
Regarding the aspect of feature extraction of an arc fault current and voltage signals, Gustavo S. da Rocha [
3] took the loop current as the analysis object, and combined wavelet decomposition with the support vector machine (SVM) to realize the detection of the SAF. Yu [
4] used improved complete ensemble empirical mode decomposition with adaptive noise (ICEEMDAN) to decompose the arc fault current data, and then constructed the detection variables to distinguish the arc fault from the normal state by selecting the intrinsic mode function (IMF) and calculating its variance. Ali Amiri [
5] carried out recurrence quantification analysis (RQA) on the original current, and used the definition of the determinism parameter (DET) as the characteristic quantity to realize the SAF identification of a photovoltaic system using the threshold method. G. Zou [
6] obtained the arc fault current component by the complete ensemble empirical mode decomposition with adaptive noise (CEEMDAN), and proposed a highly identifiable feature mining method based on the maximal information coefficient and the feature change significance. Z. Wang [
7] proposed an SAF identification method based on the variational mode decomposition (VMD) and support vector machine. Although the feature extraction of arc fault data has been carried out in References [
3,
4,
5,
6,
7], there are still some problems, such as the modal aliasing or average error of the set in the data processed by wavelet decomposition, CEEMDAN, RQA and other algorithms.
Because deep learning can mine the hidden features in the signal, it has been widely used in the field of SAF detection in recent years. Jiang [
8] extracted the features of arc current signals through time domain, frequency domain and time-frequency domain analysis, and constructed a comprehensive arc fault detection model with load type detection and position determination function the combining random forest (RF) with deep neural networks (DNNs). Gao [
9] used the squeeze-excitation network-deep convolution generative adversarial network (SE-DCGAN) to enhance the Gramian angular summation fields (GASF) image of the arc fault data to solve the problem of limited SAF samples. Liu [
10] extracted the Hurst exponent, inter-harmonic variance and wavelet energy entropy (H-I-W) as the three-dimensional feature of the arc, and constructed the arc fault diagnosis model by combining the convolutional neural network (CNN) and the long short-term memory network (LSTM), which enhanced the fault identification ability. Xin [
11] proposed a lightweight arc fault detection method based on an EffNet module, which can reduce the complexity of the algorithm at the same detection accuracy level. Although the method based on artificial intelligence has achieved good arc fault detection accuracy, it is not clear whether the results of References [
8,
9,
10,
11] are applicable to the arc fault detection of a motor frequency converter load.
In the field of industrial system arc fault diagnosis, W. Li [
12] carried out the SAF experiment in a multi-load system. Through the construction, training and testing of the recurrent neural network (RNN), the diagnosis and line selection of the arc fault were realized. C. Han [
13] proposed an arc fault identification method based on the kernel principal component analysis (KPCA) and firefly algorithm optimized support vector machine (FA-SVM), and verified the effectiveness of the method under complex harmonic conditions. H. Gao [
14] established a low-dimensional arc fault feature vector by using the fractional Fourier transform (FRFT) and SVM, and proposed an arc fault detection and phase selection model. In References [
12,
13,
14], the problem of arc fault detection under vibration conditions was not discussed, and the influence of the mechanical fault of the motor itself on the arc fault was not considered.
In References [
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14], good results have been achieved in the aspects of arc fault signal preprocessing, feature analysis and detection model establishment, but there are still the following shortcomings. In References [
3,
4,
5,
6,
7], when the fault data are preprocessed, the empirical mode decomposition (EMD) correlation algorithms have problems such as modal aliasing or difficulty in aligning IMF components, which will have a certain impact on the diagnosis results. In References [
8,
9,
10,
11], the deep learning algorithm performs well in arc fault detection, but there is still some room for optimization. In Reference [
10], only the global features extracted by the hidden layer at the end of CNN module are transmitted between the long short-term memory (LSTM) module and CNN module, and the local features contained in the middle hidden layer of CNN are not included. As a result, the global features extracted by the constructed neural network only contain high-level features such as sequence information, and it is difficult to describe low-level features such as single-peak signals. In References [
12,
13,
14], the problem of arc fault detection of a motor frequency converter load under no vibration conditions was studied. But it is not clear what the characteristics are of the SAF of electrical contact points under vibration conditions and whether the cause of a motor fault can be preliminarily analyzed via the loop current.
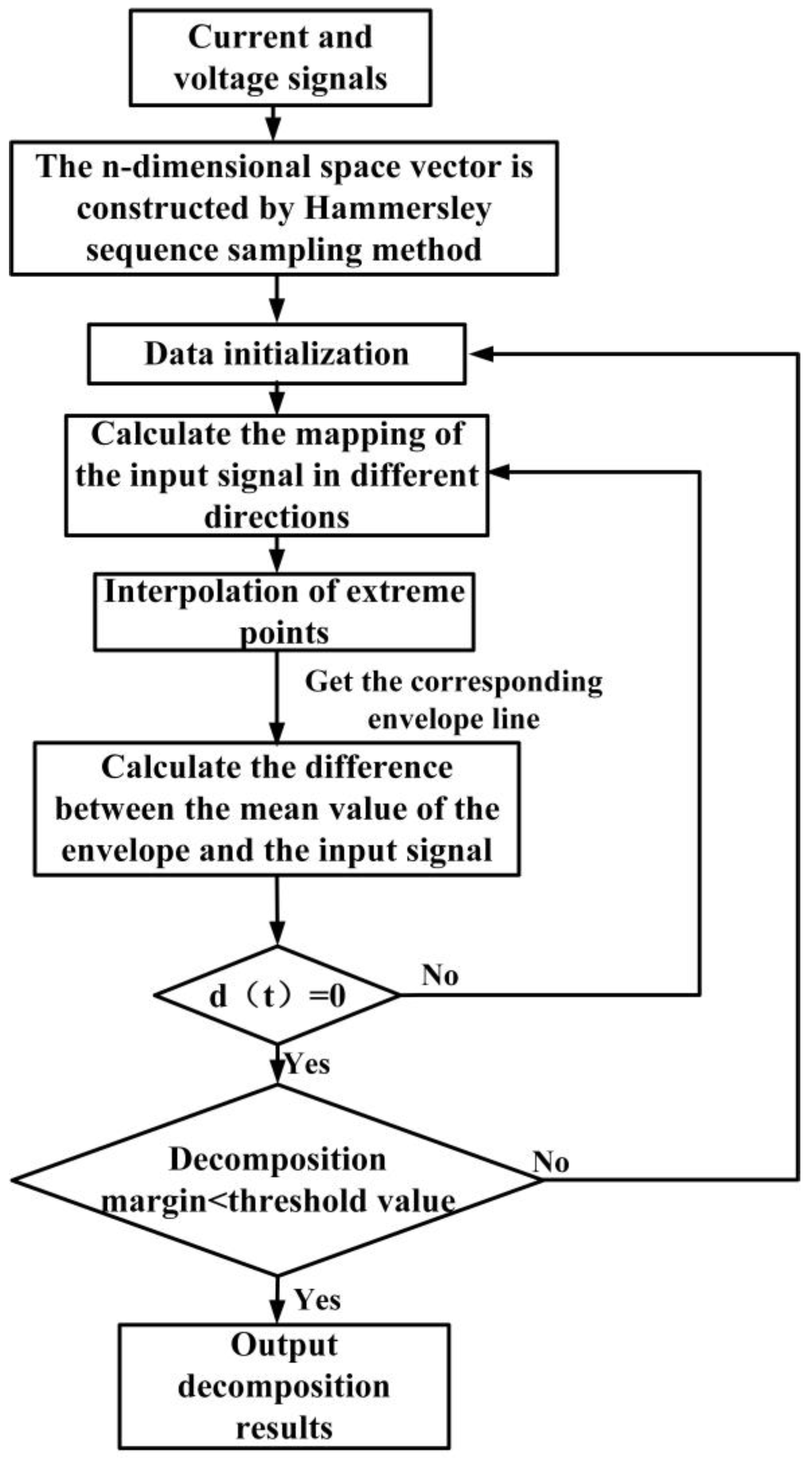
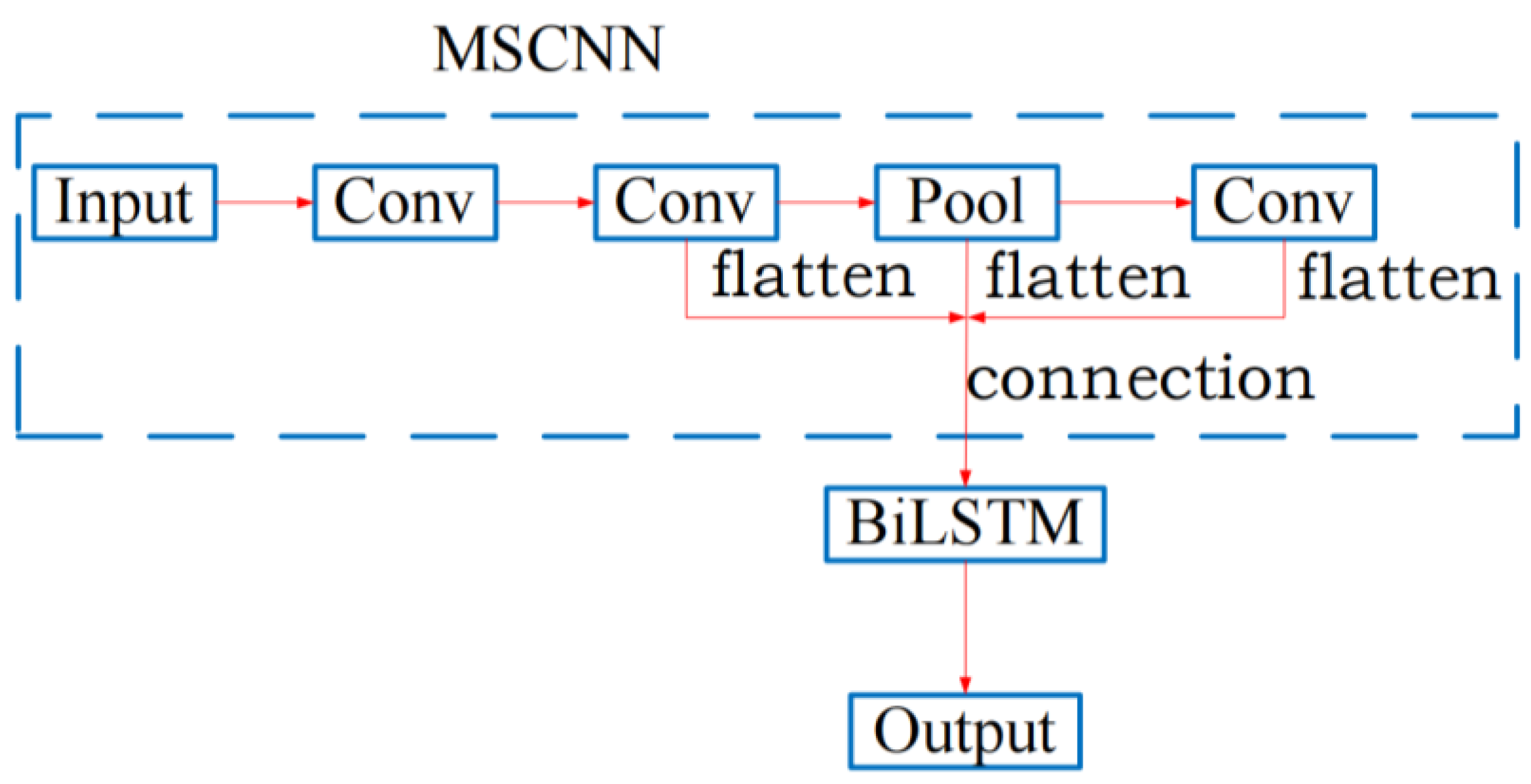
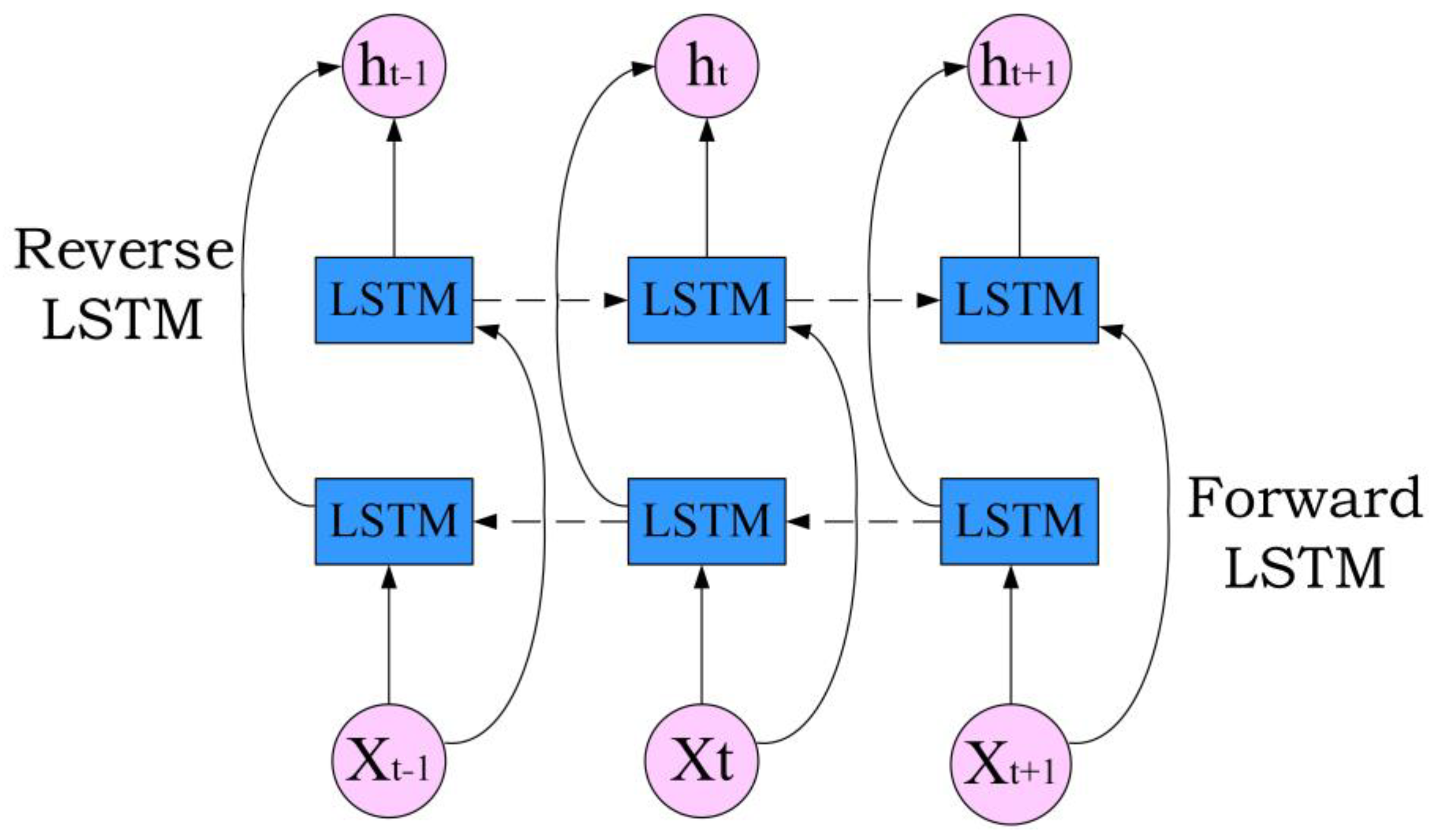
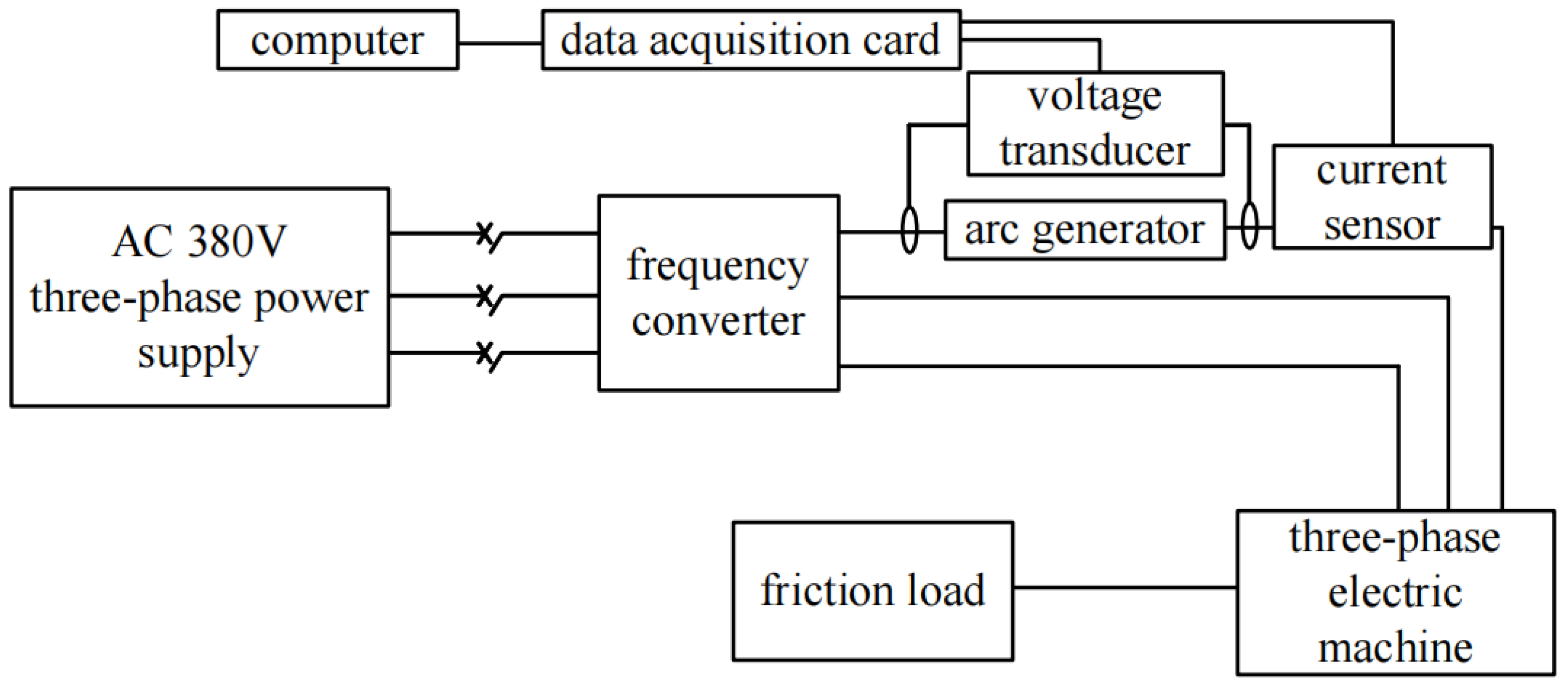
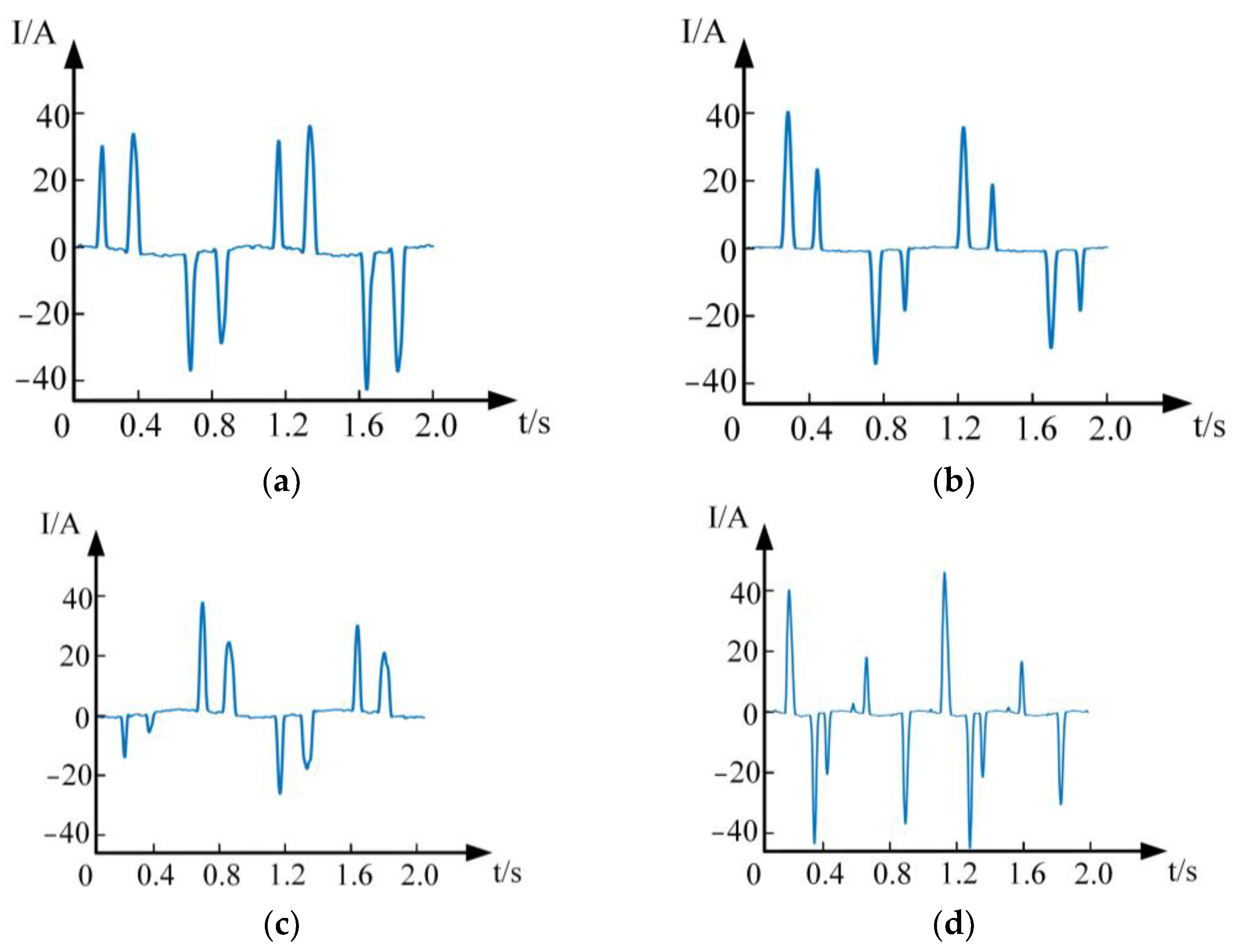
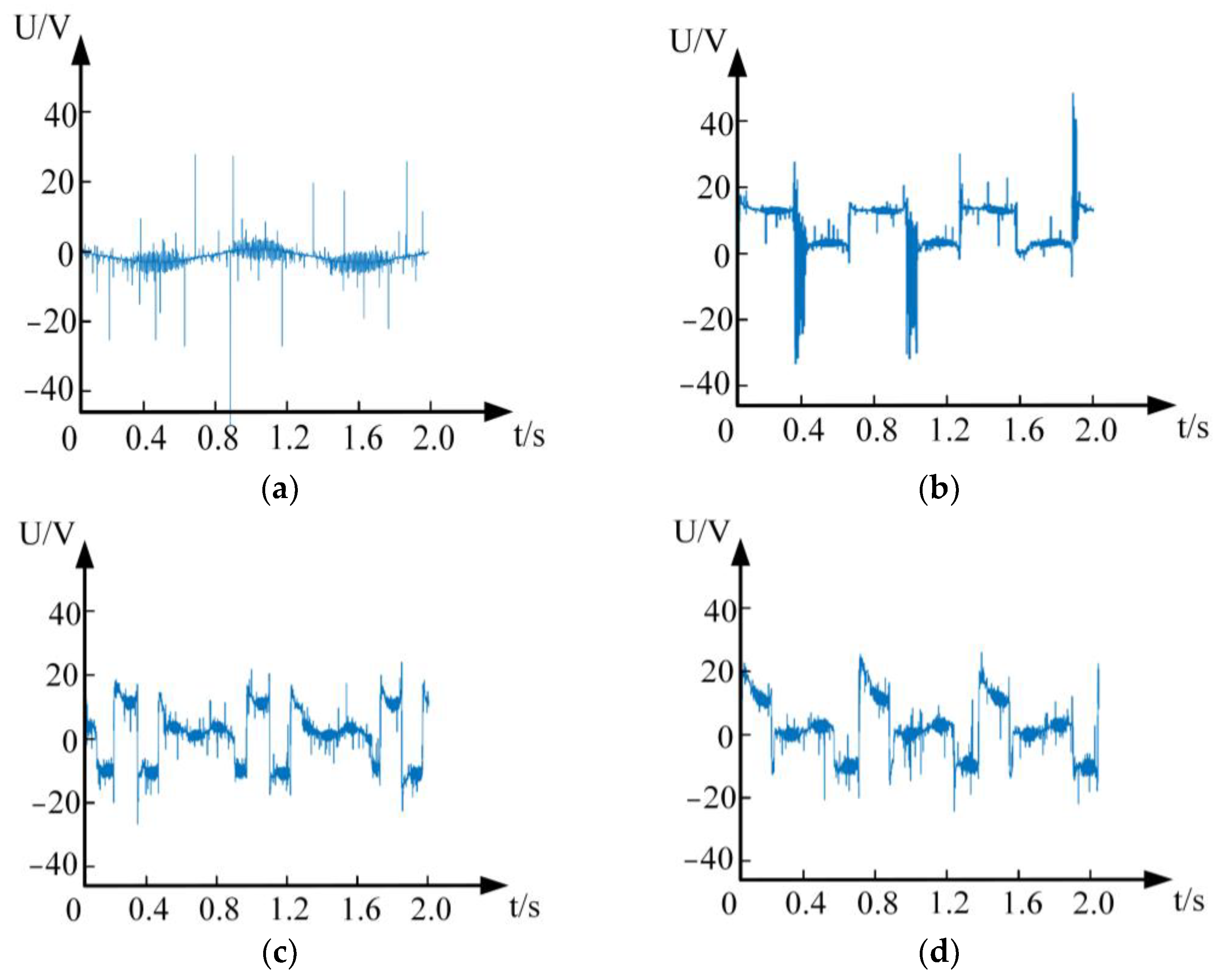
To address the above problems, an arc fault generator with adjustable vibration frequency and amplitude is designed in this paper, which can simulate the SAF under different vibration conditions. The noise-assisted multivariate empirical mode decomposition (NA-MEMD) arc feature extraction method is constructed by combining the noise channel signal and the multivariate empirical mode decomposition, so as to better extract the frequency domain characteristics of the SAF current under vibration conditions and solve the problem of feature extraction modal aliasing. Meanwhile, the arc voltage and circuit are simultaneously analyzed to avoid misjudgment caused by single information. Finally, multi-scale technology is combined with the traditional CNN and bidirectional long short-term memory network (BiLSTM) to construct the MSCNN-BiLSTM arc fault detection model, so that the BiLSTM module can receive more and more abundant multi-level features from the CNN and improve the accuracy of the detection model.
6. Conclusions
In this paper, the back-end arc fault experiment of a frequency converter under vibration conditions was carried out. The SAF generated by the electrical contact point at a specific vibration frequency under the mechanical fault state of the motor was simulated. Compared with the fault simulation at the front-end of the frequency converter, the scheme proposed in this paper is more suitable for an actual SAF under the mechanical vibration of a motor. In this paper, noise-assisted multivariate empirical mode decomposition is used to extract the features of arc current and voltage, which reduces the time of feature extraction. Compared with CEEMDAN and other algorithms with high detection accuracy, the feature extraction time of a single sample is shorter, which reduces the calculation amount for subsequent detection and improves the detection accuracy.
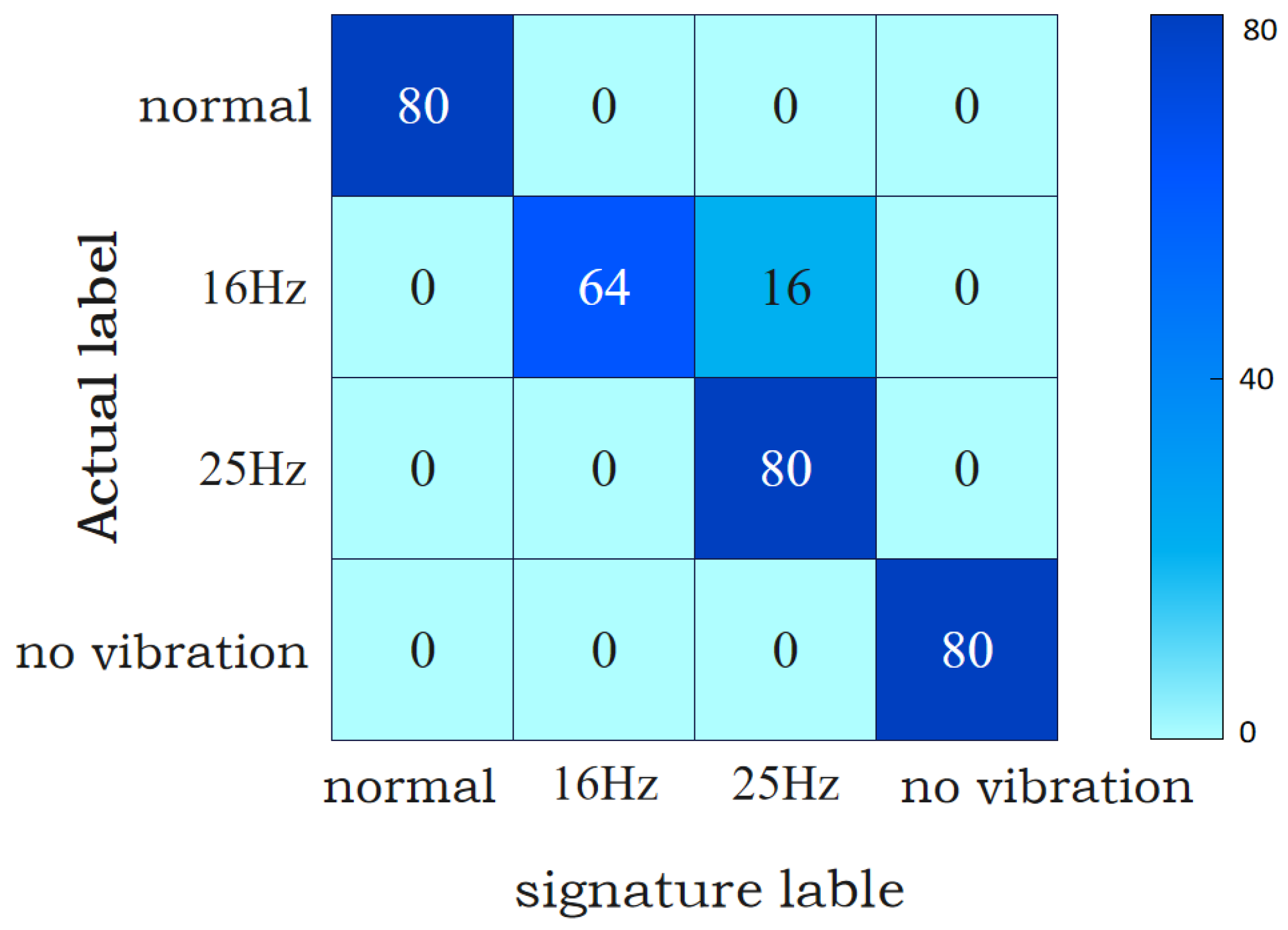
Finally, this paper proposes an NA-MEMD-MSCNN-BiLSTM model based on SAF detection. The accuracy of this model for SAF detection at the back-end of a frequency converter can reach 99.69%. Compared with the detection methods in other studies, this study not only improves the detection accuracy, but also controls the detection time of a single sample at 0.044 ms. While improving the detection accuracy, the detection time is controlled, which provides the theoretical basis for the development of subsequent arc fault detection devices and realizes the preliminary judgment of the cause of motor mechanical faults. In addition, the detection accuracy of the model proposed in this paper can reach 99.37%, 98.75% and 95.94%, respectively, under 10 dB, 20 dB and 30 dB noise signal interference, and it still has high detection accuracy under different fault conditions. Therefore, the model proposed in this paper has good noise immunity and generalization.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}