
Enhanced Perception for Autonomous Vehicles at Obstructed Intersections: An Implementation of Vehicle to Infrastructure (V2I) Collaboration



Abstract
1. Introduction
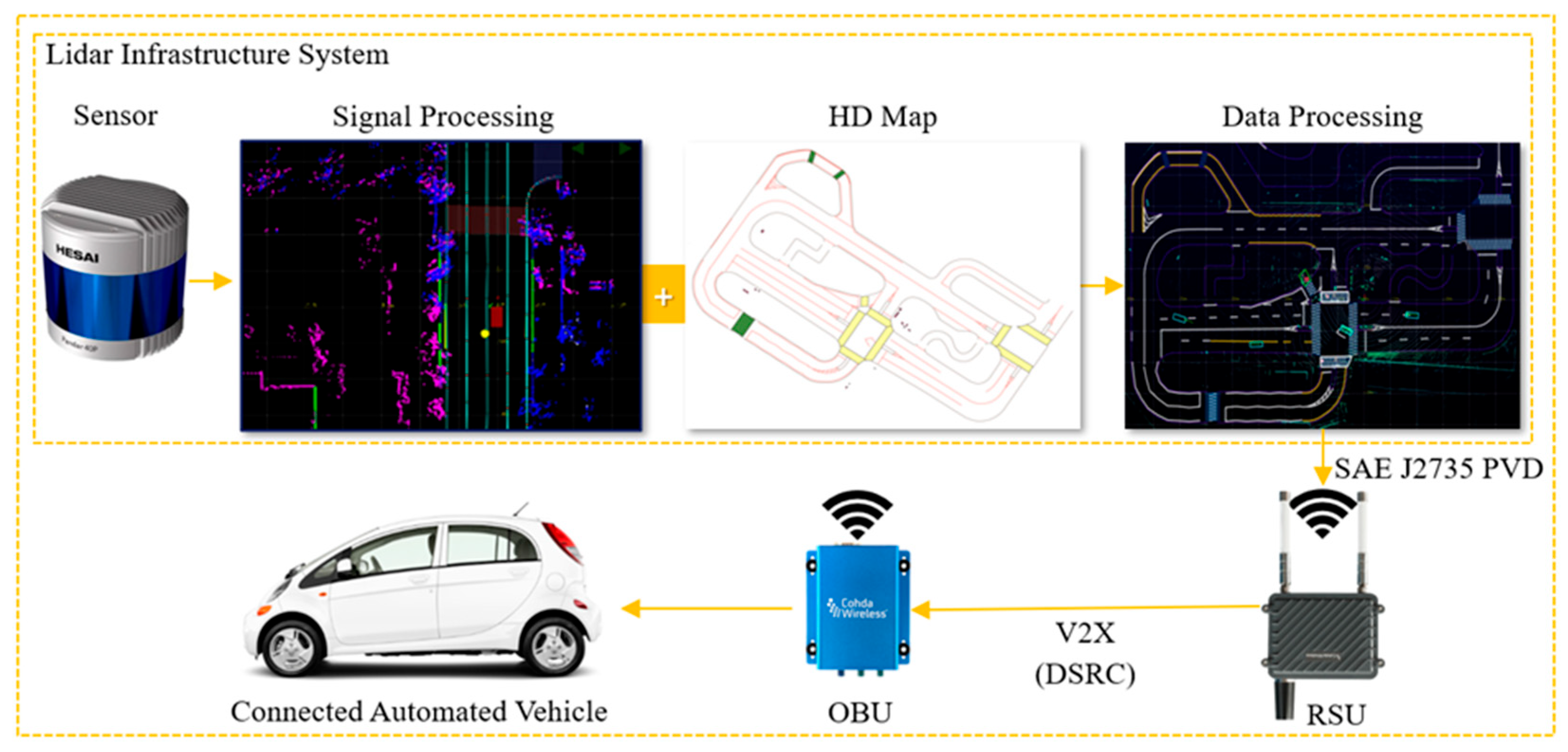
- We successfully established an integrated experimental platform, combining the open-source software of the Baidu Apollo Autonomous Driving System 7.0 (ADS) (Baidu Inc, Beijing, China), Cohda Wireless V2X (Cohda Wireless, Wayville, Australia) communication equipment, and the Autonomous a2z company’s independently developed LiDAR Infrastructure System (Autonomous a2z, Anyang-si, Korea), setting the stage for vehicle–infrastructure cooperative perception experiments.
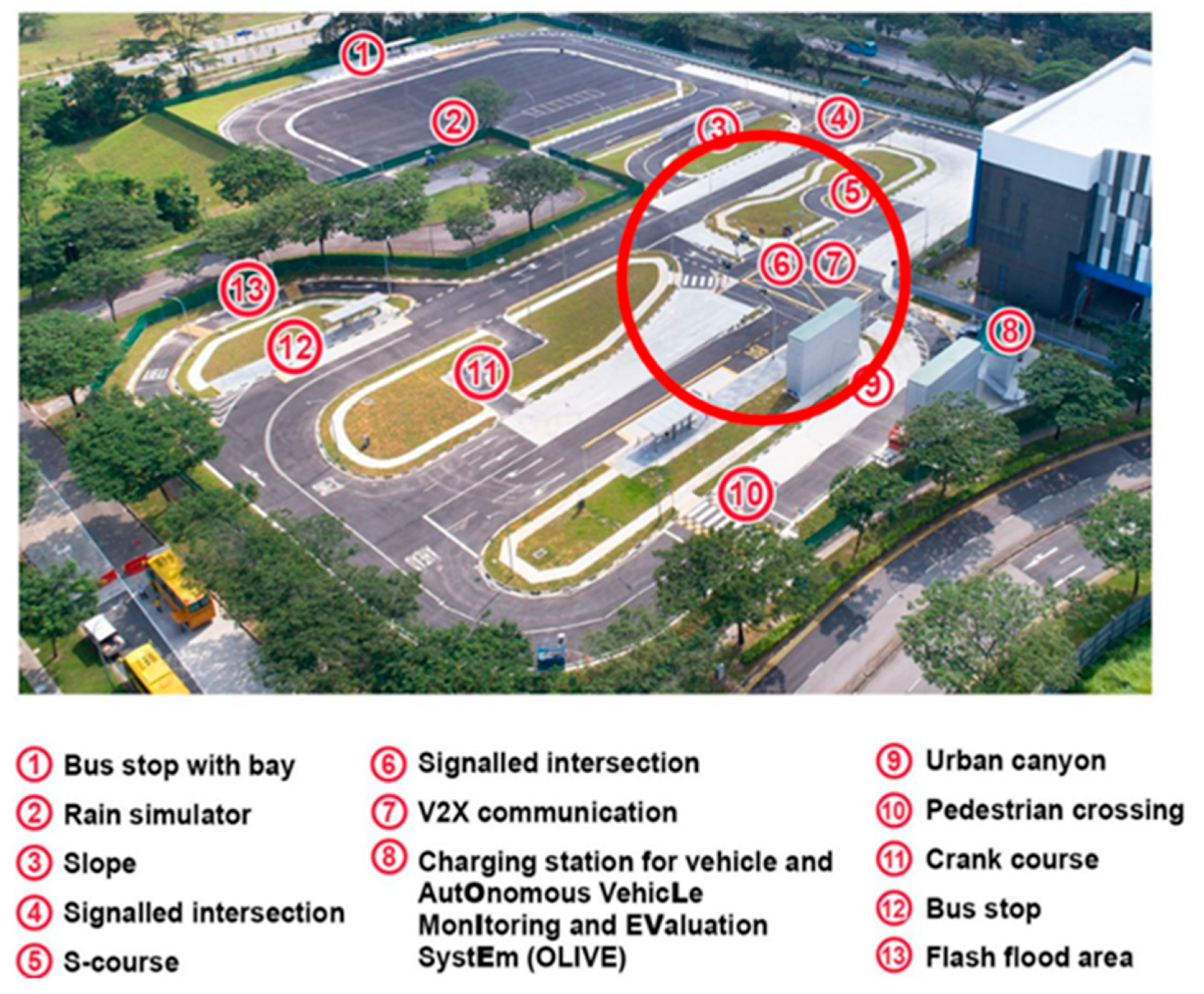
- We conducted a series of experiments in various obstructed intersection scenarios at the CETRAN (Centre of Excellence for Testing & Research of Autonomous Vehicles—NTU) autonomous vehicle test track, with the objective of examining how roadside perception enhancement assists vehicles in detecting objects in obstructed scenarios.
- We adhered to the SAE J2735 V2X standards [32] in the experiments, utilizing Dedicated Short-Range Communications (DSRC) methods. A detailed analysis of communication latency and packet delivery ratio data was performed, providing a basis for optimizing vehicular cooperative communication technologies.
2. Related Work
3. System Design
3.1. LiDAR Infrastructure System
3.2. Vehicle
3.3. Implementation of System
4. Experimental Testing
4.1. Experimental Setup
4.2. Occlusion Scenarios and Visualization
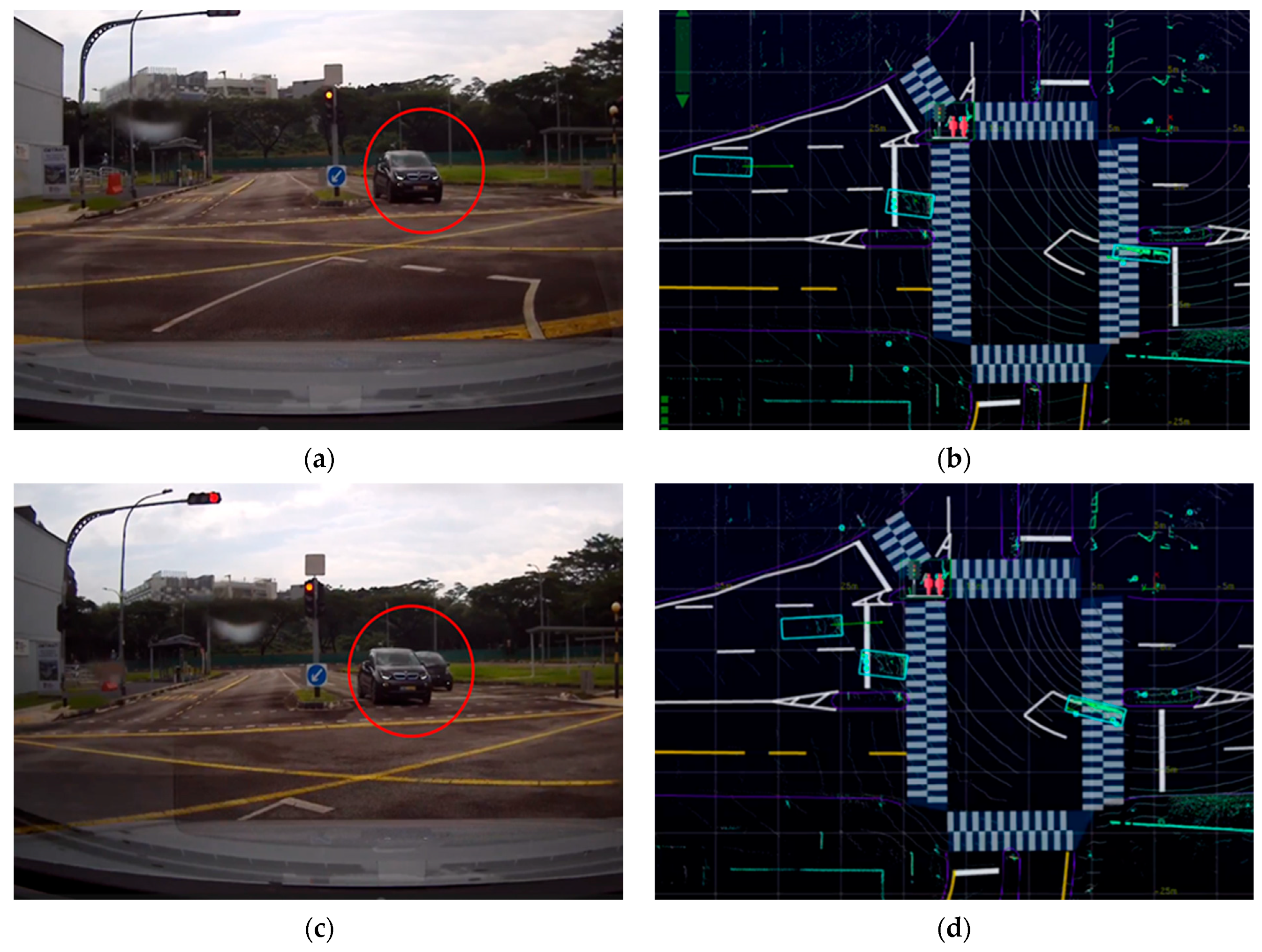
4.2.1. The Right-Turn Scenario
4.2.2. The Left-Turn Scenario
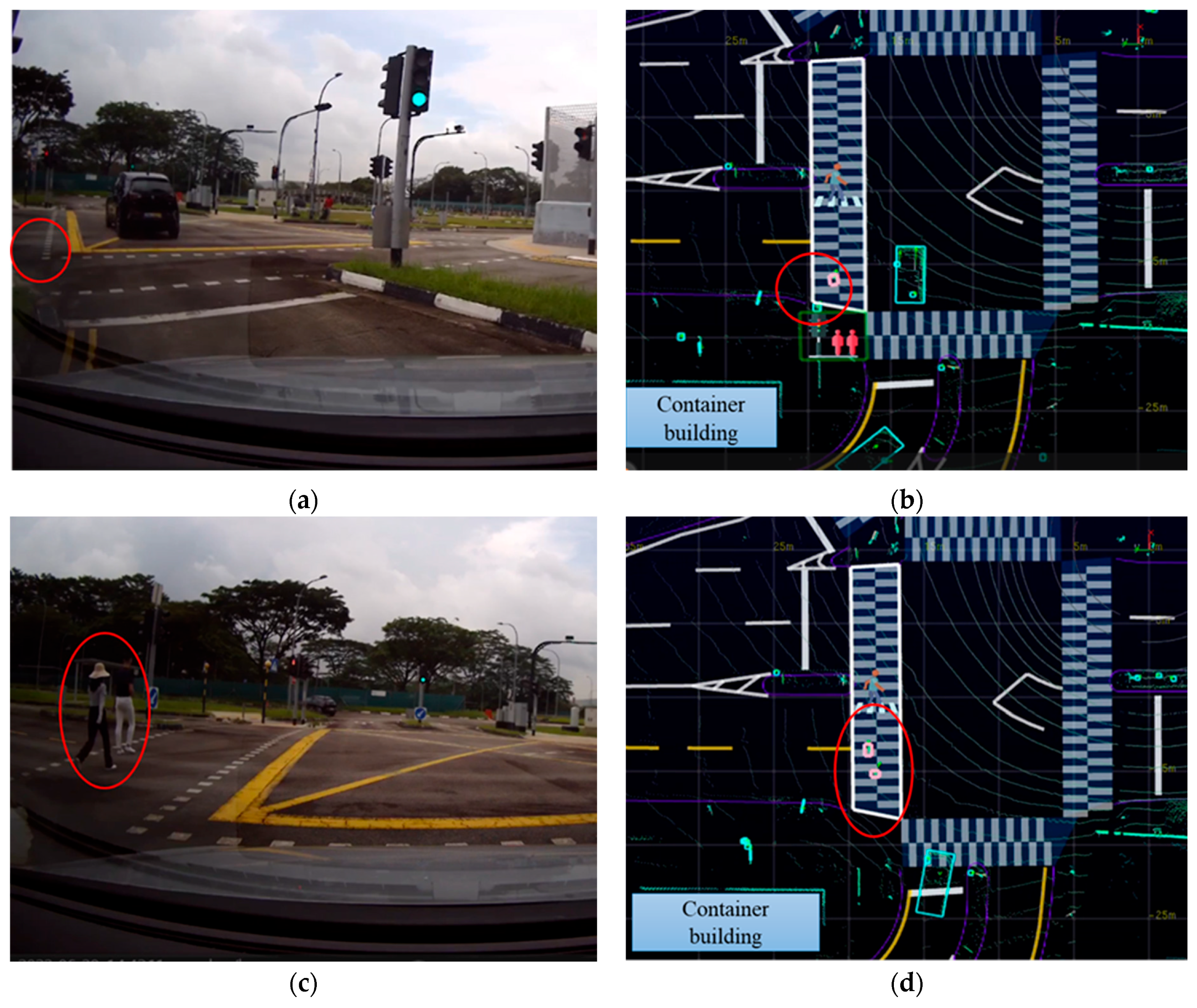
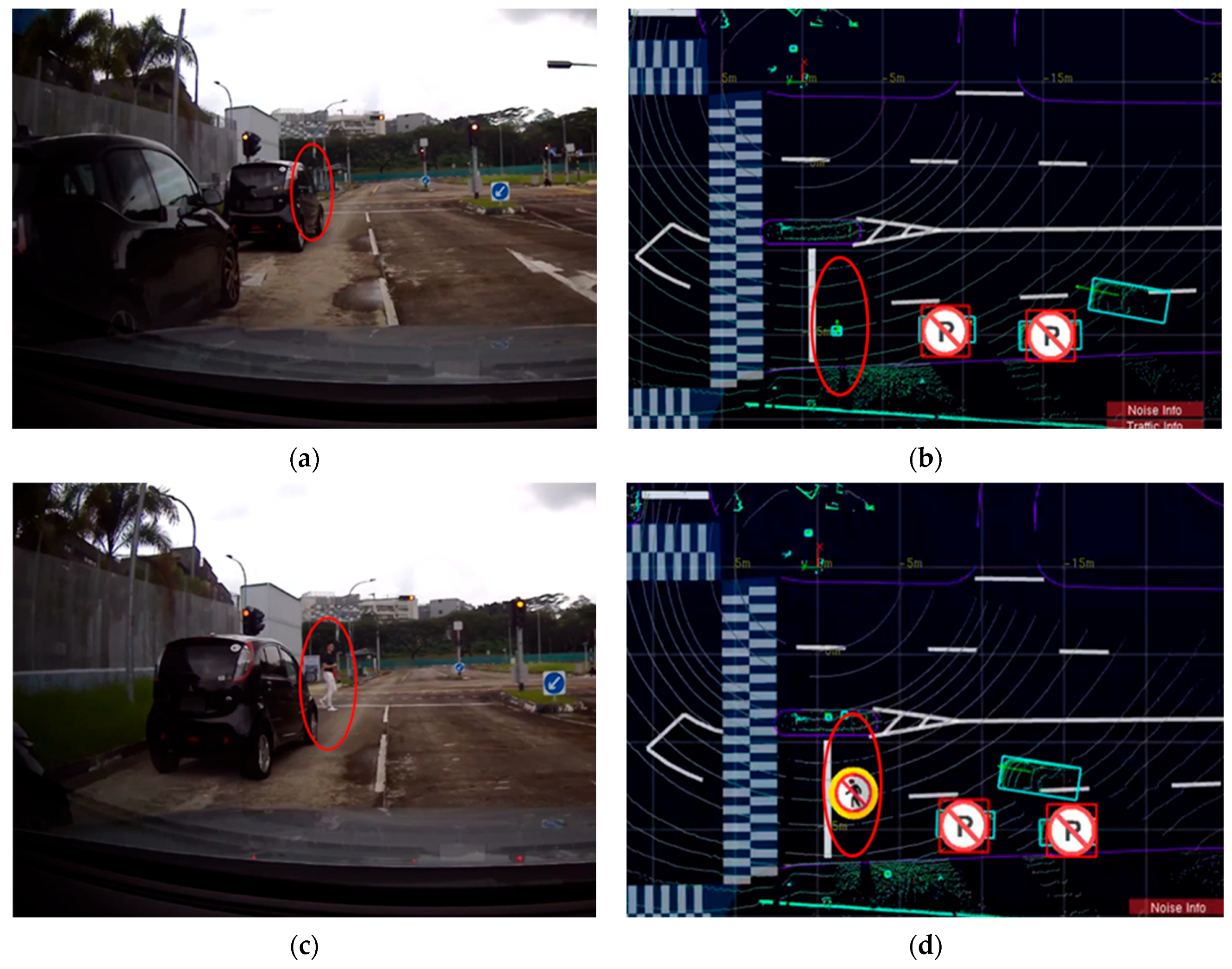
4.2.3. The Pedestrian Jaywalking Scenario
5. Experimental Evaluation
5.1. Latency
- Stage 1 was the LiDAR processing delay in the LIS, which included the time taken to obtain LiDAR data and transmit them to the LIS edge device, and the duration required for the perception algorithm to process the data on the edge device. This included the processing delay in the LIS pertaining to the clustering of the point cloud and the detection and localization of the objects. This value could not be directly derived from the system itself; it was measured by conducting tests.
- Stage 2 was data transmission via V2X, which included the process of encoding the perception results, broadcasting them to the vehicle via DSRC, and then decoding and writing them into the vehicle’s Apollo system. This value was calculated by comparing the timestamps between when the perception message was published in the LIS and when the message was decoded and reaches the Apollo module.
- To ensure the accurate synchronization of timestamps between various devices in the network, the Network Time Protocol (NTP) was initially employed in both the LIS and Apollo workstations. Subsequently, the timestamp differences were calculated between the perception message’s publication in the LIS and the message’s decoding and arrival at the Apollo module.

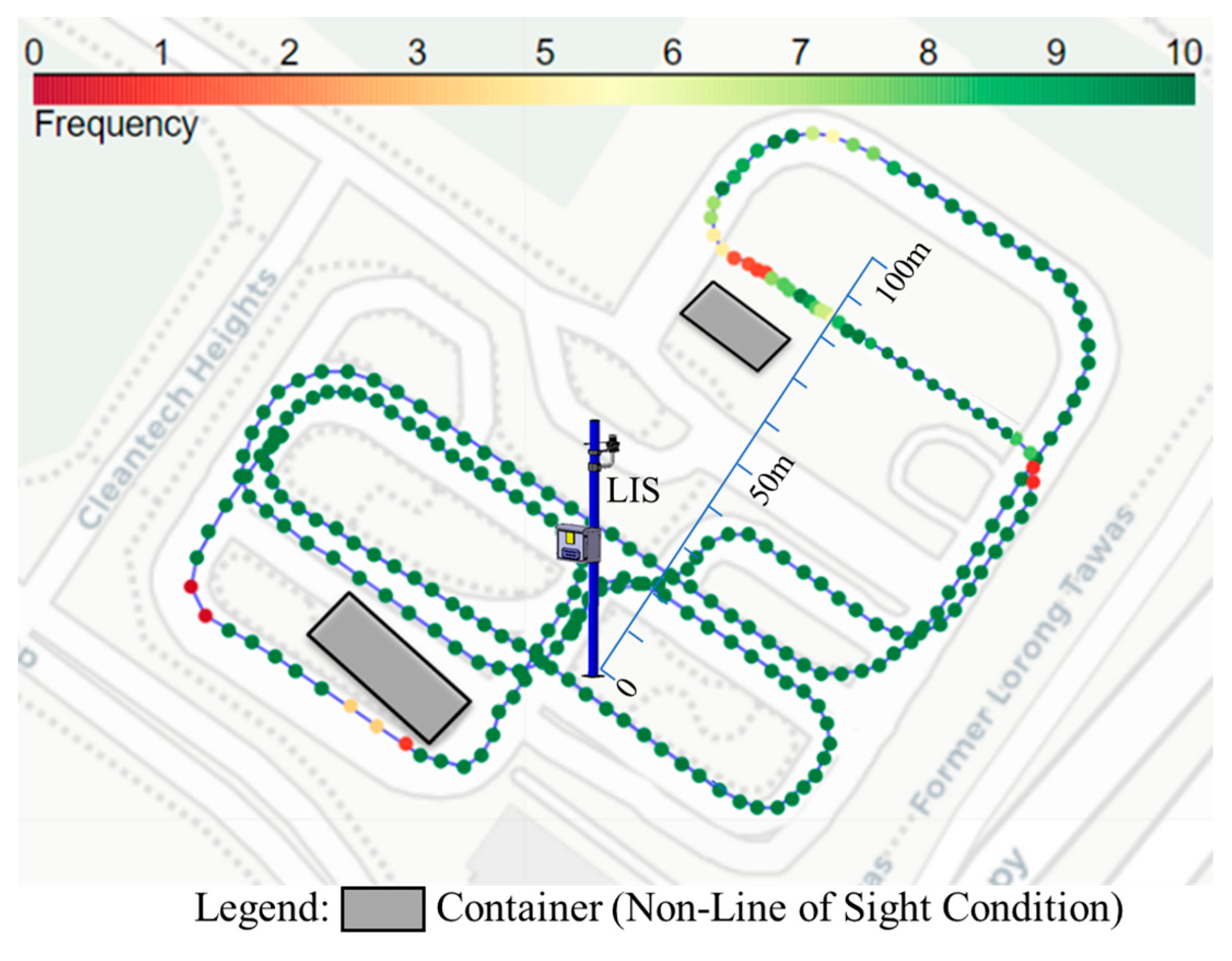
5.2. Packet Delivery Ratio
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gilroy, S.; Jones, E.; Glavin, M. Overcoming occlusion in the automotive environment—A review. IEEE Trans. Intell. Transp. Syst. 2019, 22, 23–35. [Google Scholar] [CrossRef]
- Shetty, A.; Yu, M.; Kurzhanskiy, A.; Grembek, O.; Tavafoghi, H.; Varaiya, P. Safety challenges for autonomous vehicles in the absence of connectivity. Transp. Res. Part C Emerg. Technol. 2021, 128, 103133. [Google Scholar] [CrossRef]
- Yu, S.; Zhao, C.; Song, L.; Li, Y.; Du, Y. Understanding traffic bottlenecks of long freeway tunnels based on a novel location-dependent lighting-related car-following model. Tunn. Undergr. Space Technol. 2023, 136, 105098. [Google Scholar] [CrossRef]
- Deng, Y.; Zhu, H.; Shen, Y.; Ling, J.; Feng, S. Insights into analysis and evaluation on the tunnel lighting environment influenced by vehicle headlights. Tunn. Undergr. Space Technol. 2024, 144, 105546. [Google Scholar] [CrossRef]
- Wong, A.; Murat, A.; Francesco, B. Improving Parking Lot Efficiency through Autonomous Control and Assignment Strategies: A Microscopic Traffic Simulation Analysis; Technical Report No. UCB/EECS-2023-166; University of California: Berkeley, CA, USA, 2023. [Google Scholar]
- Yu, X.; Marin, M. A study on recent developments and issues with obstacle detection systems for automated vehicles. Sustainability 2020, 12, 3281. [Google Scholar] [CrossRef]
- Xiao, Z.; Shu, J.; Jiang, H.; Min, G.; Liang, J.; Iyengar, A. Toward collaborative occlusion-free perception in connected autonomous vehicles. IEEE Trans. Mob. Comput. 2023. early access. [Google Scholar] [CrossRef]
- Marti, E.D.; de Miguel, M.A.; Garcia, F.; Perez, J. A review of sensor technologies for perception in automated driving. IEEE Intell. Transp. Syst. Mag. 2019, 11, 94–108. [Google Scholar] [CrossRef]
- Cui, G.; Zhang, W.; Xiao, Y.; Yao, L.; Fang, Z. Cooperative perception technology of autonomous driving in the internet of vehicles environment: A review. Sensors 2022, 22, 5535. [Google Scholar] [CrossRef]
- Zhang, C.; Steinhauser, F.; Hinz, G.; Knoll, A. Occlusion-Aware Planning for Autonomous Driving with Vehicle-to-Everything Communication. IEEE Trans. Intell. Veh. 2023. early access. [Google Scholar] [CrossRef]
- He, Y.; Wu, B.; Dong, Z.; Wan, J.; Shi, W. Towards C-V2X Enabled Collaborative Autonomous Driving. IEEE Trans. Veh. Technol. 2023, 72, 15450–15462. [Google Scholar] [CrossRef]
- Shan, M.; Narula, K.; Wong, Y.F.; Worrall, S.; Khan, M.; Alexander, P.; Nebot, E. Demonstrations of cooperative perception: Safety and robustness in connected and automated vehicle operations. Sensors 2020, 21, 200. [Google Scholar] [CrossRef] [PubMed]
- Merdrignac, P.; Shagdar, O.; Tohmé, S.; Franchineau, J.L. Augmented perception by v2x communication for safety of autonomous and non-autonomous vehicles. In Proceedings of the 7th Transport Research Arena TRA, Wien, Austria, 16–19 April 2018. [Google Scholar]
- Thandavarayan, G.; Sepulcre, M.; Gozalvez, J. Generation of cooperative perception messages for connected and automated vehicles. IEEE Trans. Veh. Technol. 2020, 69, 16336–16341. [Google Scholar] [CrossRef]
- Zhang, R.; Meng, D.; Bassett, L.; Shen, S.; Zou, Z.; Liu, H.X. Robust Roadside Perception for Autonomous Driving: An Annotation-free Strategy with Synthesized Data. arXiv 2023, arXiv:2306.17302. [Google Scholar]
- Jandial, A.; Merdrignac, P.; Shagdar, O.; Fevrier, L. Implementation and evaluation of intelligent roadside infrastructure for automated vehicle with I2V communication. In Vehicular Ad-hoc Networks for Smart Cities: Third International Workshop, 2019; Springer: Singapore, 2020. [Google Scholar]
- Seebacher, S.; Datler, B.; Erhart, J.; Greiner, G.; Harrer, M.; Hrassnig, P.; Präsent, A.; Schwarzl, C.; Ullrich, M. Infrastructure data fusion for validation and future enhancements of autonomous vehicles’ perception on Austrian motorways. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Shi, S.; Cui, J.; Jiang, Z.; Yan, Z.; Xing, G.; Niu, J.; Ouyang, Z. VIPS: Real-time perception fusion for infrastructure-assisted autonomous driving. In Proceedings of the 28th Annual International Conference on Mobile Computing and Networking, Sydney, Australia, 17–21 October 2022. [Google Scholar]
- Bai, Z.; Wu, G.; Qi, X.; Liu, Y.; Oguchi, K.; Barth, M.J. Infrastructure-based object detection and tracking for cooperative driving automation: A survey. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 5–9 June 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Arnold, E.; Dianati, M.; de Temple, R.; Fallah, S. Cooperative perception for 3D object detection in driving scenarios using infrastructure sensors. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1852–1864. [Google Scholar] [CrossRef]
- Tsukada, M.; Oi, T.; Kitazawa, M.; Esaki, H. Networked roadside perception units for autonomous driving. Sensors 2020, 20, 5320. [Google Scholar] [CrossRef] [PubMed]
- Piazzoni, A.; Cherian, J.; Vijay, R.; Chau, L.P.; Dauwels, J. CoPEM: Cooperative Perception Error Models for Autonomous Driving. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Gabb, M.; Digel, H.; Muller, T.; Henn, R.-W. Infrastructure-supported perception and track-level fusion using edge computing. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Miucic, R.; Sheikh, A.; Medenica, Z.; Kunde, R. V2X applications using collaborative perception. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Zhang, R.; Zou, Z.; Shen, S.; Liu, H.X. Design, implementation, and evaluation of a roadside cooperative perception system. Transp. Res. Rec. 2022, 2676, 273–284. [Google Scholar] [CrossRef]
- Yu, G.; Li, H.; Wang, Y.; Chen, P.; Zhou, B. A review on cooperative perception and control supported infrastructure-vehicle system. Green Energy Intell. Transp. 2022, 1, 100023. [Google Scholar] [CrossRef]
- Liu, S.; Gao, C.; Chen, Y.; Peng, X.; Kong, X.; Wang, K.; Xu, R.; Jiang, W.; Xiang, H.; Ma, J.; et al. Towards Vehicle-to-everything Autonomous Driving: A Survey on Collaborative Perception. arXiv 2023, arXiv:2308.16714. [Google Scholar]
- C-Roads Platform. Evaluation & Assessment Plan. Available online: https://www.c-roads.eu/fileadmin/user_upload/media/Dokumente/C-Roads_WG3_Evaluation_and_Assessment_Plan_version_June19_adopted_by_Countries_Final.pdf (accessed on 1 January 2019).
- Srotyr, M.; Zelinka, T.; Lokaj, Z. Hybrid Communication Solution for C-ITS and Its Evaluation. In Proceedings of the 2017 Smart Cities Symposium Prague (SCSP), Prague, Czech Republic, 25–26 May 2017. [Google Scholar]
- C-Roads Platform. Harmonized C-ITS Specifications for Europe—Release 1.7. Available online: https://www.c-roads.eu/platform/about/news/News/entry/show/release-17-of-c-roads-harmonised-c-its-specifications.html (accessed on 1 January 2020).
- Hameed Mir, Z.; Filali, F. C-ITS Applications, Use Cases and Requirements for V2X Communication Systems Threading Through IEEE 802.11 p to 5G. In Towards a Wireless Connected World: Achievements and New Technologies; Springer International Publishing: Berlin/Heidelberg, Germany, 2022; pp. 261–285. [Google Scholar]
- Misener, J. SAE Connected Vehicle Standards; Proc. CES16 2016; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Sun, P.; Sun, C.; Wang, R.; Zhao, X. Object detection based on roadside LiDAR for cooperative driving automation: A review. Sensors 2022, 22, 9316. [Google Scholar] [CrossRef]
- Liu, W.; Shintaro, M.; Yoshiyuki, O. Cooperation of V2I/P2I communication and roadside radar perception for the safety of vulnerable road users. In Proceedings of the 2018 16th International Conference on Intelligent Transportation Systems Telecommunications (ITST), Lisbon, Portugal, 15–17 October 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Zhao, X.; Mu, K.; Hui, F.; Prehofer, C. A cooperative vehicle-infrastructure based urban driving environment perception method using a DS theory-based credibility map. Optik 2017, 138, 407–415. [Google Scholar] [CrossRef]
- Duan, X.; Jiang, H.; Tian, D.; Zou, T.; Zhou, J.; Cao, Y. V2I based environment perception for autonomous vehicles at intersections. China Commun. 2021, 18, 1–12. [Google Scholar] [CrossRef]
- Baidu Apollo. Autonomous Driving Systems. Available online: https://github.com/ApolloAuto/apollo (accessed on 1 December 2021).
- Chang, X.Y.; Xu, Q.; Li, K.; Bian, Y.; Han, H.; Zhang, J. Analysis of Control Performance of Intelligent Connected Vehicles Under Communication Delay and Packet Loss. China J. Highw. Transp. 2019, 32, 216. [Google Scholar]
- Mannoni, V.; Berg, V.; Sesia, S.; Perraud, E. A comparison of the V2X communication systems: ITS-G5 and C-V2X. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Full Test Track | Right Turn | Left Turn | Pedestrian Jaywalking | Overall Average | |
|---|---|---|---|---|---|
| Stage 1 latency (ms) | 40 | 41 | 43 | 37 | 40.3 |
| Stage 2 latency (ms) | 84 | 86 | 87 | 79 | 84 |
| Total latency (ms) | 124 | 127 | 130 | 116 | 124.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mo, Y.; Vijay, R.; Rufus, R.; Boer, N.d.; Kim, J.; Yu, M. Enhanced Perception for Autonomous Vehicles at Obstructed Intersections: An Implementation of Vehicle to Infrastructure (V2I) Collaboration. Sensors 2024, 24, 936. https://doi.org/10.3390/s24030936
Mo Y, Vijay R, Rufus R, Boer Nd, Kim J, Yu M. Enhanced Perception for Autonomous Vehicles at Obstructed Intersections: An Implementation of Vehicle to Infrastructure (V2I) Collaboration. Sensors. 2024; 24(3):936. https://doi.org/10.3390/s24030936
Chicago/Turabian StyleMo, Yanghui, Roshan Vijay, Raphael Rufus, Niels de Boer, Jungdae Kim, and Minsang Yu. 2024. "Enhanced Perception for Autonomous Vehicles at Obstructed Intersections: An Implementation of Vehicle to Infrastructure (V2I) Collaboration" Sensors 24, no. 3: 936. https://doi.org/10.3390/s24030936
APA StyleMo, Y., Vijay, R., Rufus, R., Boer, N. d., Kim, J., & Yu, M. (2024). Enhanced Perception for Autonomous Vehicles at Obstructed Intersections: An Implementation of Vehicle to Infrastructure (V2I) Collaboration. Sensors, 24(3), 936. https://doi.org/10.3390/s24030936