


Reliability of Xsens IMU-Based Lower Extremity Joint Angles during In-Field Running


Abstract
1. Introduction
- To determine the between-day, within-day and calibration reliability of discrete hip, knee, and ankle joint angles in the sagittal and frontal planes as quantified by the Xsens Link system during running at a self-selected speed on a stable asphalt surface and an unstable woodchip surface based on more than two measurement sessions each;
- To investigate potential sources of between-day variations in Xsens-based discrete hip, knee, and ankle joint angles by determining the association of between-day variations in discrete joint angles with between-day variations in running speed and stride frequency, as well as with different running surfaces.
2. Materials and Methods
2.1. Participants and Study Design
2.2. Experimental Protocol
2.3. Data Processing
2.4. Reliability Analysis
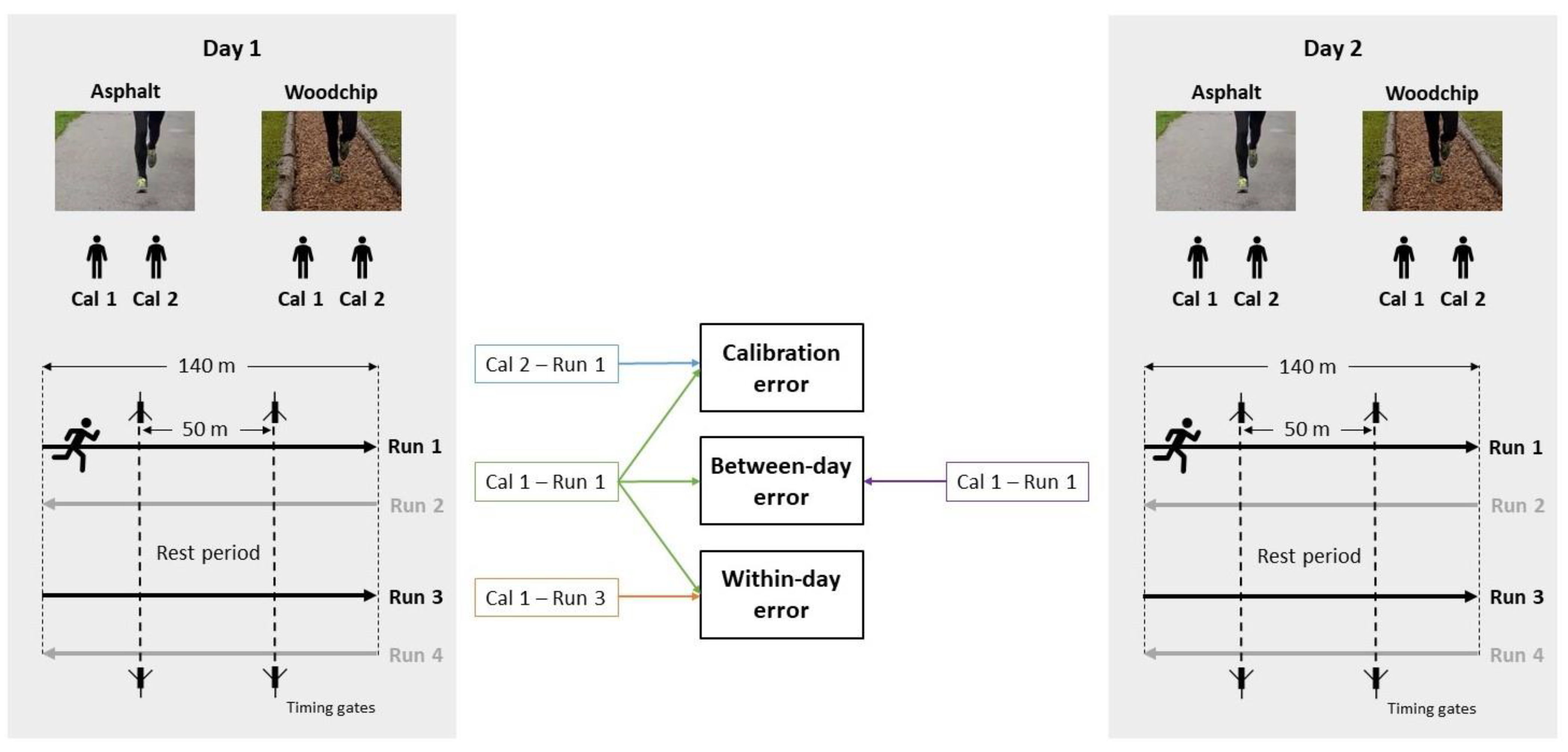
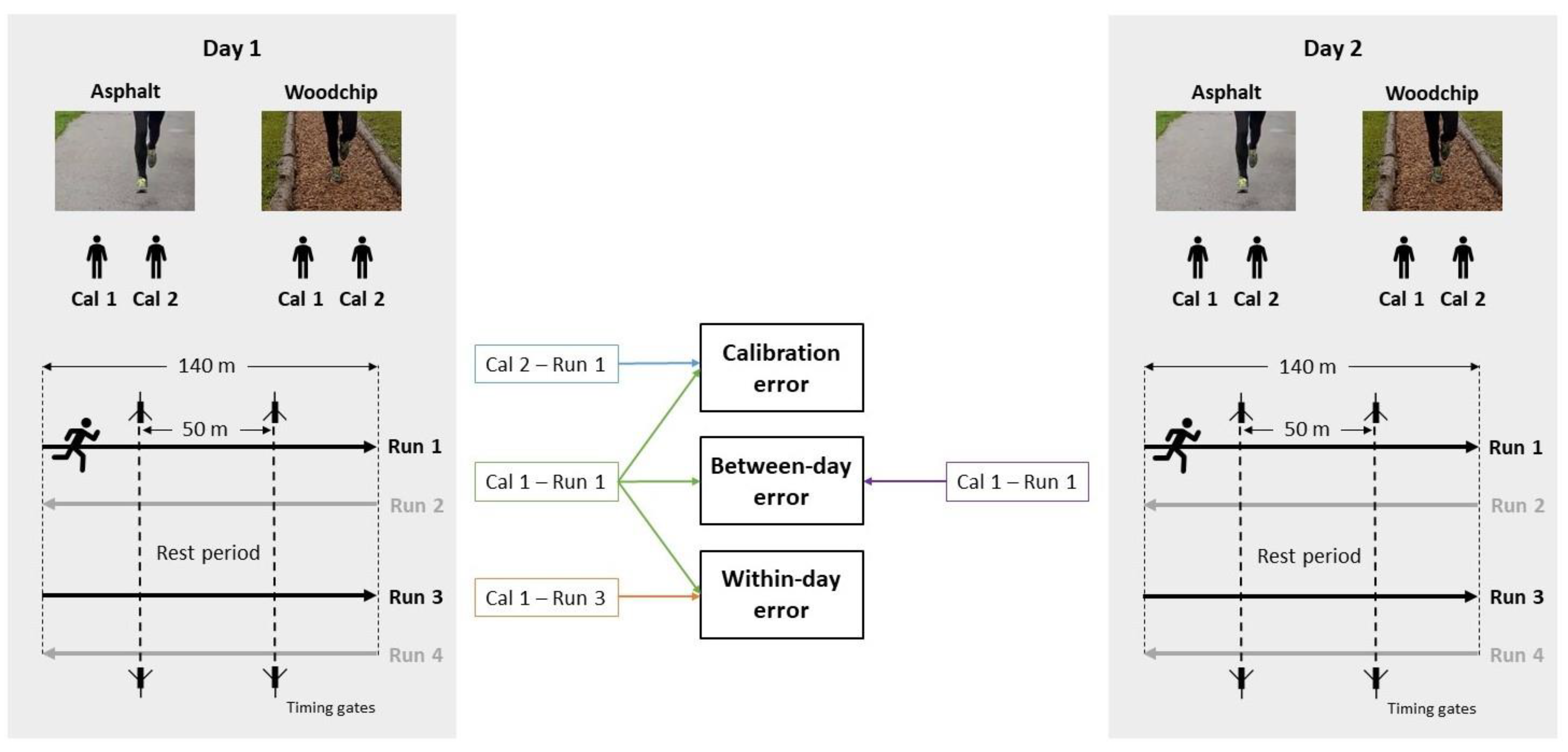
- Between-day comparisons were based on the variation in discrete joint angles between the first runs on each of the five separate days on the same surface (e.g., run 1 on five separate days on the woodchip track, see Figure 1). Specifically, we based reliability estimates on a total of five day-to-day comparisons—Day 1 vs. 2, Day 2 vs. 3, Day 3 vs. 4, Day 4 vs. 5, and Day 5 vs. 2. Day-to-day comparisons were carried out pairwise to enable the comparison of between-day vs. within-day reliability, which also only relied on two measurements, i.e., two runs within a day. While between-day reliability could have been estimated using all five testing days, the resulting confidence intervals of an ICC based on five measurements would have been systematically more narrow compared to ICC estimates based on two measurements, and thus would have hindered a fair comparison of between-day vs. within-day reliability estimates and interpretations. Day 5 was compared to Day 2 to have a fifth comparison pair, equalizing the number of comparisons underlying the median ICCs;
- Within-day comparisons were based on the variation in discrete joint angles between two separate runs on the same surface and day, and processed with the same calibration trial (e.g., run 1 vs. run 3 on the woodchip track on day 1, see Figure 1). Given the five testing days, we based reliability estimates on a total of five within-day comparisons;
- Calibration comparison was based on the variation in discrete joint angles between two copies of the same run, but processed with different calibration trials (e.g., run 1 processed with calibration 1 vs. 2 on the woodchip track on day 1, see Figure 1). Given the five testing days, we based reliability estimates on a total of five calibration comparisons.
3. Results
3.1. Runner Characteristics
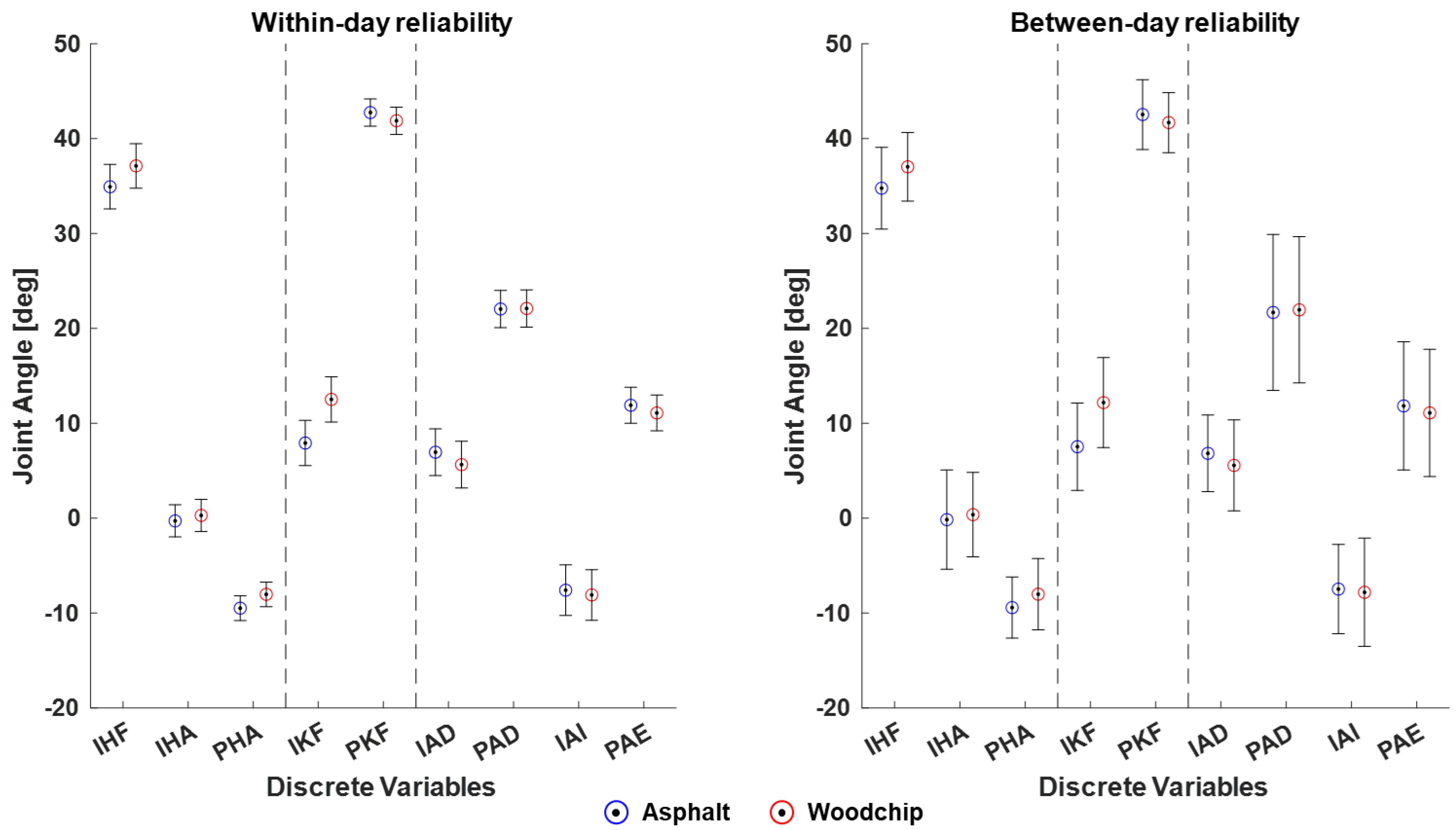
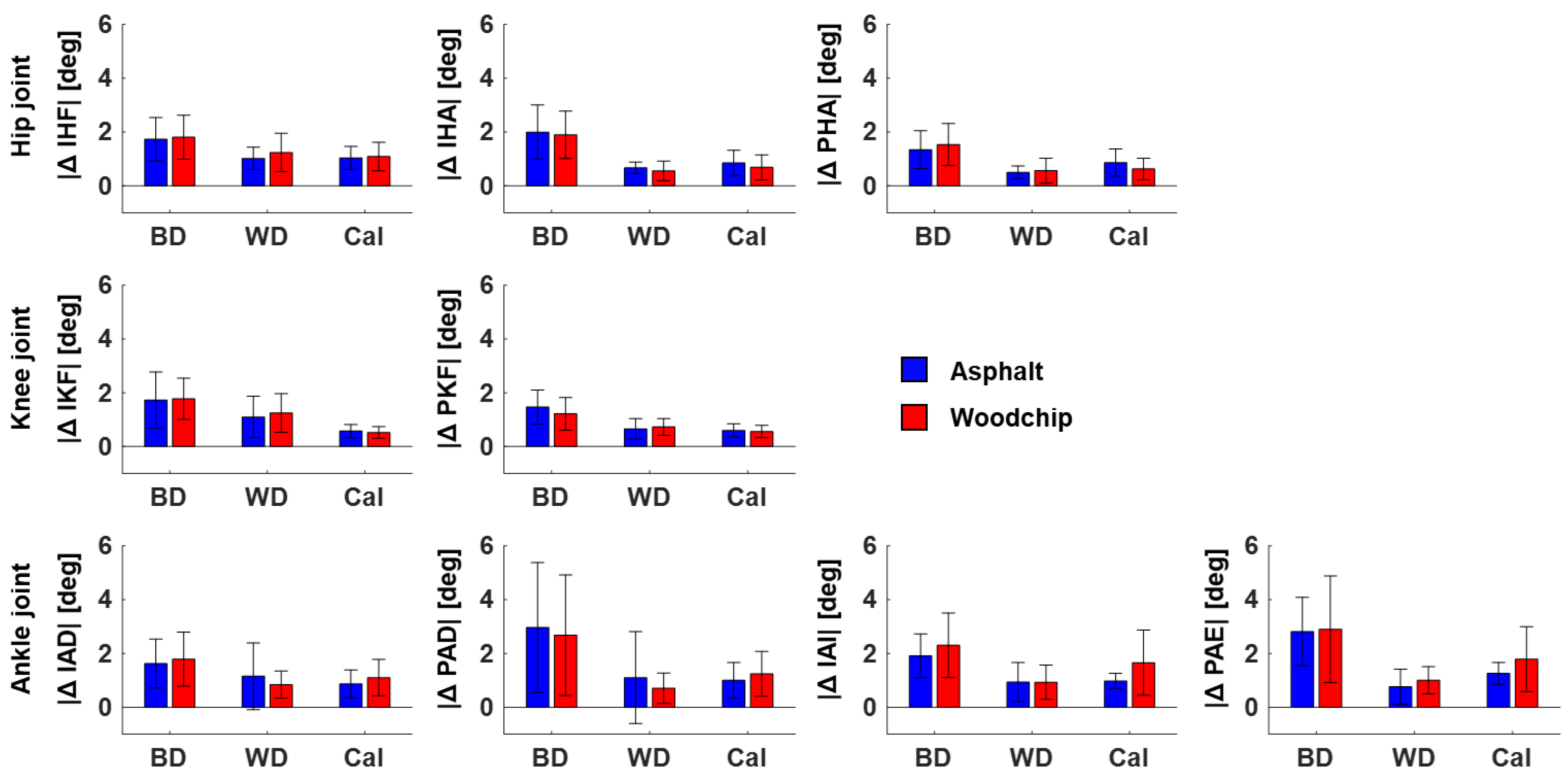
3.2. Between-Day, Within-Day and Calibration Reliability of Xsens-Based Lower Extremity Joint Angles
3.3. Potential Sources of Between-Day Variations in Xsens-Based Lower Extremity Joint Angles
4. Discussion
4.1. Within-Day Reliability of Xsens-Based Lower Extremity Joint Angles
4.2. Between-Day and Calibration Reliability of Xsens-Based Lower Extremity Joint Angles
4.3. Potential Sources of Between-Day Variations in Xsens-Based Lower Extremity Joint Angles
4.4. Comparison with the Reliability of Other Assessments of 3D Running Kinematics
4.5. Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mohr, M.; Federolf, P.; Pepping, G.-J.; Stein, T.; van Andel, S.; Weir, G. Editorial: Human movement and motor control in the natural environment. Front. Bioeng. Biotechnol. 2023, 11, 1210173. [Google Scholar] [CrossRef] [PubMed]
- Dorschky, E.; Camomilla, V.; Davis, J.; Federolf, P.; Reenalda, J.; Koelewijn, A.D. Perspective on ‘in the wild’ movement analysis using machine learning. Hum. Mov. Sci. 2023, 87, 103042. [Google Scholar] [CrossRef] [PubMed]
- Benson, L.C.; Clermont, C.A.; Bošnjak, E.; Ferber, R. The use of wearable devices for walking and running gait analysis outside of the lab: A systematic review. Gait Posture 2018, 63, 124–138. [Google Scholar] [CrossRef] [PubMed]
- Dorschky, E.; Nitschke, M.; Seifer, A.-K.; van den Bogert, A.J.; Eskofier, B.M. Estimation of gait kinematics and kinetics from inertial sensor data using optimal control of musculoskeletal models. J. Biomech. 2019, 95, 109278. [Google Scholar] [CrossRef] [PubMed]
- Jaén-Carrillo, D.; Roche-Seruendo, L.E.; Cartón-Llorente, A.; Ramírez-Campillo, R.; García-Pinillos, F. Mechanical Power in Endurance Running: A Scoping Review on Sensors for Power Output Estimation during Running. Sensors 2020, 20, 6482. [Google Scholar] [CrossRef]
- Slade, P.; Kochenderfer, M.J.; Delp, S.L.; Collins, S.H. Sensing leg movement enhances wearable monitoring of energy expenditure. Nat. Commun. 2021, 12, 4312. [Google Scholar] [CrossRef]
- Zeng, Z.; Liu, Y.; Hu, X.; Tang, M.; Wang, L. Validity and Reliability of Inertial Measurement Units on Lower Extremity Kinematics During Running: A Systematic Review and Meta-Analysis. Sports Med. Open 2022, 8, 86. [Google Scholar] [CrossRef]
- Roetenberg, D.; Luinge, H.; Slycke, P. XSens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors. XSens Technol. 2013, 1, 1–9. [Google Scholar]
- Mohr, M.; Peer, L.; De Michiel, A.; van Andel, S.; Federolf, P. Whole-body kinematic adaptations to running on an unstable, irregular, and compliant surface. Sports Biomech. 2023, 1–15. [Google Scholar] [CrossRef]
- Zandbergen, M.; Buurke, J.; Veltink, P.; Reenalda, J. Quantifying and correcting for speed and stride frequency effects on running mechanics in fatiguing outdoor running. Front. Sports Act. Living 2023, 5, 1085513. [Google Scholar] [CrossRef]
- Genitrini, M.; Fritz, J.; Stöggl, T.; Schwameder, H. Performance Level Affects Full Body Kinematics and Spatiotemporal Parameters in Trail Running-A Field Study. Sports 2023, 11, 188. [Google Scholar] [CrossRef]
- Fraeulin, L.; Maurer-Grubinger, C.; Holzgreve, F.; Groneberg, D.A.; Ohlendorf, D. Comparison of Joint Kinematics in Transition Running and Isolated Running in Elite Triathletes in Overground Conditions. Sensors 2021, 21, 4869. [Google Scholar] [CrossRef]
- Roetenberg, D.; Slycke, P.J.; Veltink, P.H. Ambulatory position and orientation tracking fusing magnetic and inertial sensing. IEEE Trans. Biomed. Eng. 2007, 54, 883–890. [Google Scholar] [CrossRef] [PubMed]
- Picerno, P. 25 years of lower limb joint kinematics by using inertial and magnetic sensors: A review of methodological approaches. Gait Posture 2017, 51, 239–246. [Google Scholar] [CrossRef] [PubMed]
- Cereatti, A.; Bonci, T.; Akbarshahi, M.; Aminian, K.; Barré, A.; Begon, M.; Benoit, D.L.; Charbonnier, C.; Maso, F.D.; Fantozzi, S.; et al. Standardization proposal of soft tissue artefact description for data sharing in human motion measurements. J. Biomech. 2017, 62, 5–13. [Google Scholar] [CrossRef]
- Hughes, G.T.G.; Camomilla, V.; Vanwanseele, B.; Harrison, A.J.; Fong, D.T.P.; Bradshaw, E.J. Novel technology in sports biomechanics: Some words of caution. Sports Biomech. 2021, 1–9. [Google Scholar] [CrossRef]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Validation of inertial measurement units with an optoelectronic system for whole-body motion analysis. Med. Biol. Eng. Comput. 2017, 55, 609–619. [Google Scholar] [CrossRef] [PubMed]
- Al-Amri, M.; Nicholas, K.; Button, K.; Sparkes, V.; Sheeran, L.; Davies, J.L. Inertial Measurement Units for Clinical Movement Analysis: Reliability and Concurrent Validity. Sensors 2018, 18, 719. [Google Scholar] [CrossRef] [PubMed]
- Trott, E.; Al-Amri, M. The reliability of inertial measurement units in estimating lower limb joint angles during treadmill running. Gait Posture 2022, 97, S182–S183. [Google Scholar] [CrossRef]
- Zhang, J.-T.; Novak, A.C.; Brouwer, B.; Li, Q. Concurrent validation of Xsens MVN measurement of lower limb joint angular kinematics. Physiol. Meas. 2013, 34, N63–N69. [Google Scholar] [CrossRef] [PubMed]
- Mavor, M.P.; Ross, G.B.; Clouthier, A.L.; Karakolis, T.; Graham, R.B. Validation of an IMU Suit for Military-Based Tasks. Sensors 2020, 20, 4280. [Google Scholar] [CrossRef]
- Schepers, M.; Giuberti, M.; Bellusci, G. Xsens MVN: Consistent tracking of human motion using inertial sensing. Xsens Technol. 2018, 8, 1–8. [Google Scholar]
- Nijmeijer, E.M.; Heuvelmans, P.; Bolt, R.; Gokeler, A.; Otten, E.; Benjaminse, A. Concurrent validation of the Xsens IMU system of lower-body kinematics in jump-landing and change-of-direction tasks. J. Biomech. 2023, 154, 111637. [Google Scholar] [CrossRef]
- Willwacher, S.; Kurz, M.; Robbin, J.; Thelen, M.; Hamill, J.; Kelly, L.; Mai, P. Running-Related Biomechanical Risk Factors for Overuse Injuries in Distance Runners: A Systematic Review Considering Injury Specificity and the Potentials for Future Research. Sports Med. 2022, 52, 1863–1877. [Google Scholar] [CrossRef]
- Atkinson, G.; Nevill, A.M. Statistical methods for assessing measurement error (reliability) in variables relevant to sports medicine. Sports Med. 1998, 26, 217–238. [Google Scholar] [CrossRef] [PubMed]
- Borg, D.N.; Bach, A.J.E.; O’Brien, J.L.; Sainani, K.L. Calculating sample size for reliability studies. PM&R 2022, 14, 1018–1025. [Google Scholar]
- Bonett, D.G. Sample size requirements for estimating intraclass correlations with desired precision. Stat. Med. 2002, 21, 1331–1335. [Google Scholar] [CrossRef] [PubMed]
- Koo, T.K.; Li, M.Y. A Guideline of Selecting and Reporting Intraclass Correlation Coefficients for Reliability Research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.; Siegler, S.; Allard, P.; Kirtley, C.; Leardini, A.; Rosenbaum, D.; Whittle, M.; D’Lima, D.D.; Cristofolini, L.; Witte, H.; et al. ISB recommendation on definitions of joint coordinate system of various joints for the reporting of human joint motion—Part I: Ankle, hip, and spine. J. Biomech. 2002, 35, 543–548. [Google Scholar] [CrossRef]
- Wu, G.; Cavanagh, P.R. ISB recommendations for standardization in the reporting of kinematic data. J. Biomech. 1995, 28, 1257–1262. [Google Scholar] [CrossRef] [PubMed]
- Benson, L.C.; Clermont, C.A.; Watari, R.; Exley, T.; Ferber, R. Automated accelerometer-based gait event detection during multiple running conditions. Sensors 2019, 19, 1483. [Google Scholar] [CrossRef]
- McGraw, K.O.; Wong, S.P. Forming inferences about some intraclass correlation coefficients. Psychol. Methods 1996, 1, 30. [Google Scholar] [CrossRef]
- The Jamovi Project (2023). Jamovi (Version 2.3.21) [Computer Software]. Available online: https://www.jamovi.org (accessed on 20 December 2023).
- Gallucci, M. GAMLj Models. 1 January 2023. Available online: https://gamlj.github.io/book/booklet.html#booklet (accessed on 2 November 2023).
- Honert, E.C.; Mohr, M.; Lam, W.K.; Nigg, S. Shoe feature recommendations for different running levels: A Delphi study. PLoS ONE 2020, 15, e0236047. [Google Scholar] [CrossRef]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Accuracy and repeatability of single-pose calibration of inertial measurement units for whole-body motion analysis. Gait Posture 2017, 54, 80–86. [Google Scholar] [CrossRef] [PubMed]
- Ahamed, N.U.; Kobsar, D.; Benson, L.; Clermont, C.; Kohrs, R.; Osis, S.T.; Ferber, R. Using wearable sensors to classify subject-specific running biomechanical gait patterns based on changes in environmental weather conditions. PLoS ONE 2018, 13, e0203839. [Google Scholar] [CrossRef] [PubMed]
- Benson, L.C.; Ahamed, N.U.; Kobsar, D.; Ferber, R. New considerations for collecting biomechanical data using wearable sensors: Number of level runs to define a stable running pattern with a single IMU. J. Biomech. 2019, 85, 187–192. [Google Scholar] [CrossRef]
- Okahisa, T.; Matsuura, T.; Tomonari, K.; Komatsu, K.; Yokoyama, K.; Iwase, J.; Yamada, M.; Sairyo, K. Between-day reliability and minimum detectable change of the Conventional Gait Model 2 and Plug-in Gait Model during running. Gait Posture 2023, 100, 171–178. [Google Scholar] [CrossRef]
- Stoneham, R.; Barry, G.; Saxby, L.; Wilkinson, M. Measurement error of 3D kinematic and kinetic measures during overground endurance running in recreational runners between two test sessions separated by 48 h. Physiol. Meas. 2019, 40, 024002. [Google Scholar] [CrossRef]
- Moran, M.F.; Rogler, I.C.; Wager, J.C. Inter-Session Repeatability of Marker-Less Motion Capture of Treadmill Running Gait. Appl. Sci. 2023, 13, 1702. [Google Scholar] [CrossRef]
- Kanko, R.M.; Laende, E.; Selbie, W.S.; Deluzio, K.J. Inter-session repeatability of markerless motion capture gait kinematics. J. Biomech. 2021, 121, 110422. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
| Grand Mean 1 (deg) | Between-Day Reliability | Within-Day Reliability | Calibration Reliability | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Group | Variable | ICC Median [Range] | ICC Median [Range] | ICC Median [Range] | |||||
| Asphalt | Woodchip | Asphalt | Woodchip | Asphalt | Woodchip | Asphalt | Woodchip | ||
| Hip | Initial hip flexion (IHF) | 34.77 | 37.02 | 0.92 [0.89, 0.95] | 0.96 [0.83, 0.96] | 0.98 [0.95, 0.98] | 0.98 [0.91, 0.99] | 0.97 [0.96, 0.99] | 0.97 [0.96, 0.98] |
| Initial hip ab-/adduction (IHA) | −0.15 | 0.38 | 0.52 [0.44, 0.68] | 0.49 [0.29, 0.62] | 0.96 [0.87, 0.98] | 0.94 [0.86, 0.99] | 0.91 [0.83, 0.94] | 0.93 [0.77, 0.99] | |
| Peak hip adduction (PHA) | −9.42 | −8.00 | 0.83 [0.70, 0.85] | 0.74 [0.63, 0.77] | 0.97 [0.92, 0.99] | 0.96 [0.74, 0.99] | 0.89 [0.87, 0.95] | 0.96 [0.87, 0.97] | |
| Knee | Initial knee flexion (IKF) | 7.53 | 12.18 | 0.92 [0.90, 0.95] | 0.92 [0.89, 0.96] | 0.97 [0.96, 0.98] | 0.97 [0.95, 0.99] | 0.99 [0.99, 0.99] | 0.99 [0.99, 1.00] |
| Peak knee flexion (PKF) | 42.53 | 41.69 | 0.82 [0.75, 0.88] | 0.89 [0.85, 0.93] | 0.96 [0.95, 0.97] | 0.96 [0.95, 0.98] | 0.97 [0.96, 0.97] | 0.98 [0.97, 0.99] | |
| Ankle | Initial ankle dorsiflexion (IAD) | 6.83 | 5.56 | 0.90 [0.82, 0.94] | 0.88 [0.87, 0.95] | 0.97 [0.52, 0.99] | 0.98 [0.90, 0.99] | 0.97 [0.96, 0.98] | 0.96 [0.91, 0.99] |
| Peak ankle dorsiflexion (PAD) | 21.68 | 21.95 | 0.38 [0.23, 0.52] | 0.47 [−0.02, 0.49] | 0.93 [0.30, 0.99] | 0.97 [0.61, 0.99] | 0.88 [0.82, 0.97] | 0.91 [0.57, 0.93] | |
| Initial ankle inversion (IAI) | −7.47 | −7.81 | 0.81 [0.77, 0.90] | 0.72 [0.64, 0.85] | 0.96 [0.92, 0.98] | 0.95 [0.87, 0.98] | 0.95 [0.93, 0.97] | 0.84 [0.73, 0.93] | |
| Peak ankle eversion (PAE) | 11.83 | 11.10 | 0.55 [0.53, 0.72] | 0.65 [0.46, 0.72] | 0.97 [0.94, 0.98] | 0.97 [0.92, 0.98] | 0.94 [0.89, 0.96] | 0.84 [0.77, 0.94] | |
| Spatio- tem-poral | Running speed (RS) | 3.47 | 3.38 | 0.93 [0.84, 0.95] | 0.93 [0.76, 0.96] | 0.94 [0.84, 0.97] | 0.97 [0.90, 0.98] | not applicable | |
| Stride frequency (SF) | 1.40 | 1.39 | 0.88 [0.81, 0.88] | 0.73 [0.55, 0.87] | 0.93 [0.90, 0.95] | 0.89 [0.73, 0.95] | |||
| Group | Variable | R-Squared Marginal | Between-Day Difference in Running Speed (bspeed) (deg per m/s) | Between-Day Difference in Stride Frequency (bSF) (deg per 1/s) | Surface (Woodship—Asphalt, bSurface) (deg) |
|---|---|---|---|---|---|
| Hip | Initial hip flexion | 0.26 | 4.23 (3.06, 5.40) | 2.55 (−6.43, 11.54) | −0.02 (−0.41, 0.36) |
| Initial hip ab-/adduction | 0.01 | −0.69 (−2.18, 0.80) | −1.05 (−13.51, 11.40) | −0.08 (−0.53, 0.37) | |
| Peak hip abduction | 0.02 | −0.48 (−1.56, 0.60) | 4.89 (−4.20, 13.99) | 0.18 (−0.15, 0.49) | |
| Knee | Initial knee flexion | 0.01 | 0.15 (−1.25, 1.54) | 6.01 (−5.71, 17.73) | 0.01 (−0.40, 0.43) |
| Peak knee flexion | 0.06 | 0.04 (−0.99, 1.07) | 11.32 (2.71, 19.94) | −0.31 (−0.62, −0.00) | |
| Ankle | Initial ankle dorsiflexion | 0.02 | 1.03 (−0.46, 2.53) | 0.92 (−11.58, 13.41) | 0.14 (−0.30, 0.59) |
| Peak ankle dorsiflexion | 0.12 | −0.57 (−3.12, 1.99) | 52.10 (30.00, 74.19) | −0.54 (−1.28, 0.19) | |
| Initial ankle inversion | 0.03 | −0.60 (−2.25, 1.04) | 10.04 (−3.58, 23.66) | 0.35 (−0.14, 0.85) | |
| Peak ankle eversion | 0.12 | −0.34 (−2.66, 1.99) | 41.01 (21.74, 60.28) | −0.12 (−0.82, 0.58) |
| Category | Variable | Current Study IMU-Based (Xsens) | Okahisa et al. (2023) [39] OMC (Vicon) | Stoneham et al. (2019) [40] OMC (Vicon) | Moran et al. (2023) Markerless [41] (Theia/Visual3D) | ||
|---|---|---|---|---|---|---|---|
| ICC Median [Range] | ICC | ICC [95% CI] | ICC [95% CI] | ||||
| Asphalt | Woodchip | Lab Floor PiG * | Lab Floor CGM2 * | Lab Floor PiG * | Lab Floor | ||
| Hip | Initial hip flexion | 0.92 [0.89, 0.95] | 0.96 [0.83, 0.96] | 0.80 | 0.87 | 0.89 [0.72, 0.96] | 0.86 [0.80, 0.91] |
| Initial hip ab-/adduction | 0.52 [0.44, 0.68] | 0.49 [0.29, 0.62] | 0.67 | 0.75 | 0.81 [0.54, 0.93] | 0.75 [0.64, 0.83] | |
| Peak hip abduction | 0.83 [0.70, 0.85] | 0.74 [0.63, 0.77] | 0.45 | 0.84 | 0.69 [0.31, 0.88] | 0.91 [0.87, 0.94] | |
| Knee | Initial knee flexion | 0.92 [0.90, 0.95] | 0.92 [0.89, 0.96] | 0.74 | 0.81 | 0.76 [0.44, 0.91] | 0.88 [0.83, 0.92] |
| Peak knee flexion | 0.82 [0.75, 0.88] | 0.89 [0.85, 0.93] | 0.74 | 0.89 | 0.78 [0.49, 0.92] | 0.90 [0.86, 0.94] | |
| Ankle | Initial ankle dorsiflexion | 0.90 [0.82, 0.94] | 0.88 [0.87, 0.95] | 0.87 | 0.93 | 0.95 [0.86, 0.98] | 0.94 [0.90, 0.96] |
| Peak ankle dorsiflexion | 0.38 [0.23, 0.52] | 0.47 [−0.02, 0.49] | 0.68 | 0.86 | 0.85 [0.63, 0.95] | 0.76 [0.66, 0.84] | |
| Initial ankle inversion | 0.81 [0.77, 0.90] | 0.72 [0.64, 0.85] | not available | 0.69 [0.31, 0.88] | 0.72 [0.61, 0.81] | ||
| Peak ankle eversion | 0.55 [0.53, 0.72] | 0.65 [0.46, 0.72] | not available | 0.74 [0.41, 0.90] | 0.83 [0.75, 0.88] | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Debertin, D.; Wargel, A.; Mohr, M. Reliability of Xsens IMU-Based Lower Extremity Joint Angles during In-Field Running. Sensors 2024, 24, 871. https://doi.org/10.3390/s24030871
Debertin D, Wargel A, Mohr M. Reliability of Xsens IMU-Based Lower Extremity Joint Angles during In-Field Running. Sensors. 2024; 24(3):871. https://doi.org/10.3390/s24030871
Chicago/Turabian StyleDebertin, Daniel, Anna Wargel, and Maurice Mohr. 2024. "Reliability of Xsens IMU-Based Lower Extremity Joint Angles during In-Field Running" Sensors 24, no. 3: 871. https://doi.org/10.3390/s24030871
APA StyleDebertin, D., Wargel, A., & Mohr, M. (2024). Reliability of Xsens IMU-Based Lower Extremity Joint Angles during In-Field Running. Sensors, 24(3), 871. https://doi.org/10.3390/s24030871