
3D Reverse-Time Migration Imaging for Multiple Cross-Hole Research and Multiple Sensor Settings of Cross-Hole Seismic Exploration

Abstract
1. Introduction
2. Methodology
2.1. 3D Acoustic Two-Way Wave Equation
2.2. Imaging Condition
2.3. Computation of Seismic Wave Travel Time
2.4. RTM Artifacts
2.5. Implementations
3. Survey Layout and Modeling
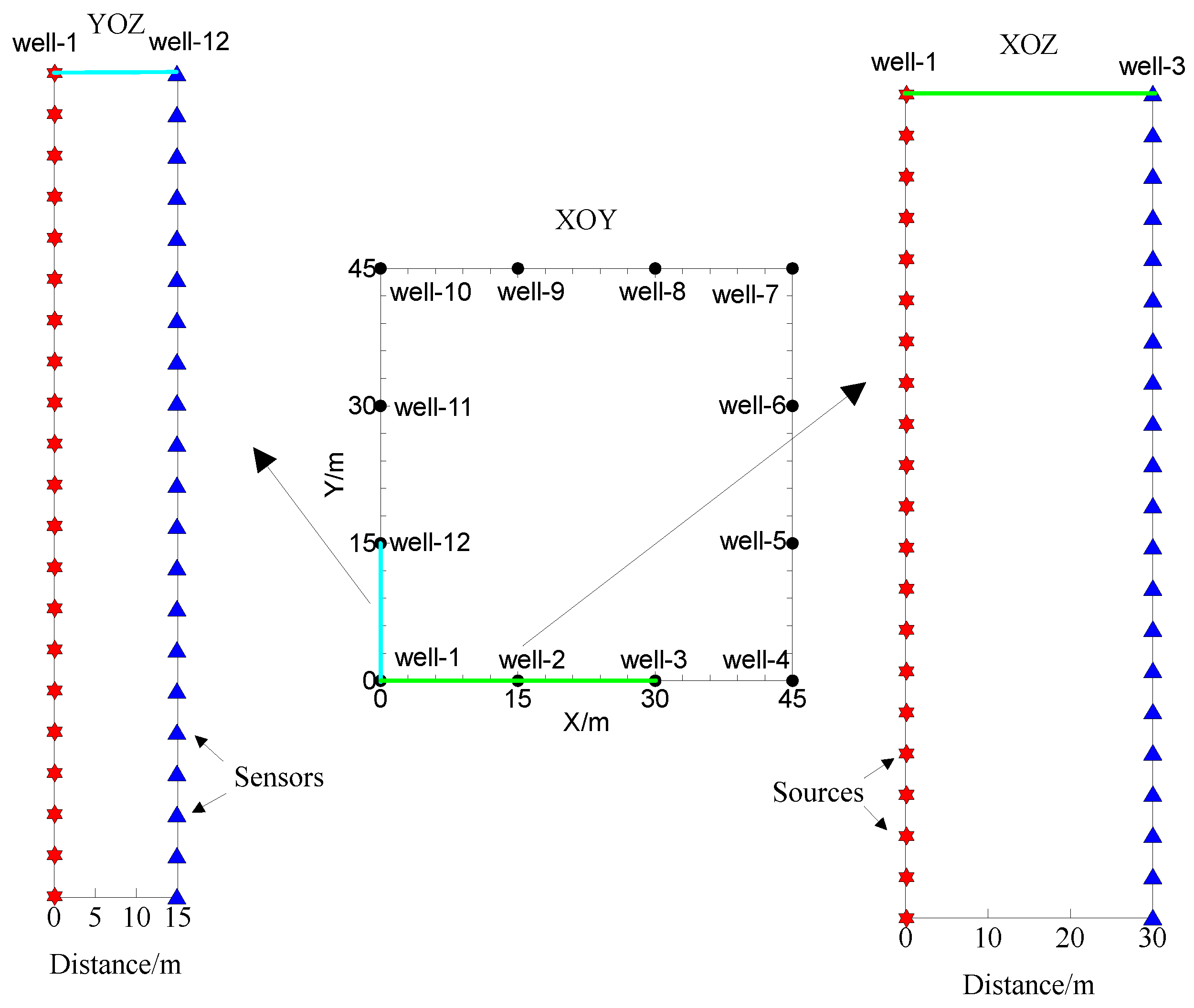
3.1. Survey Layout
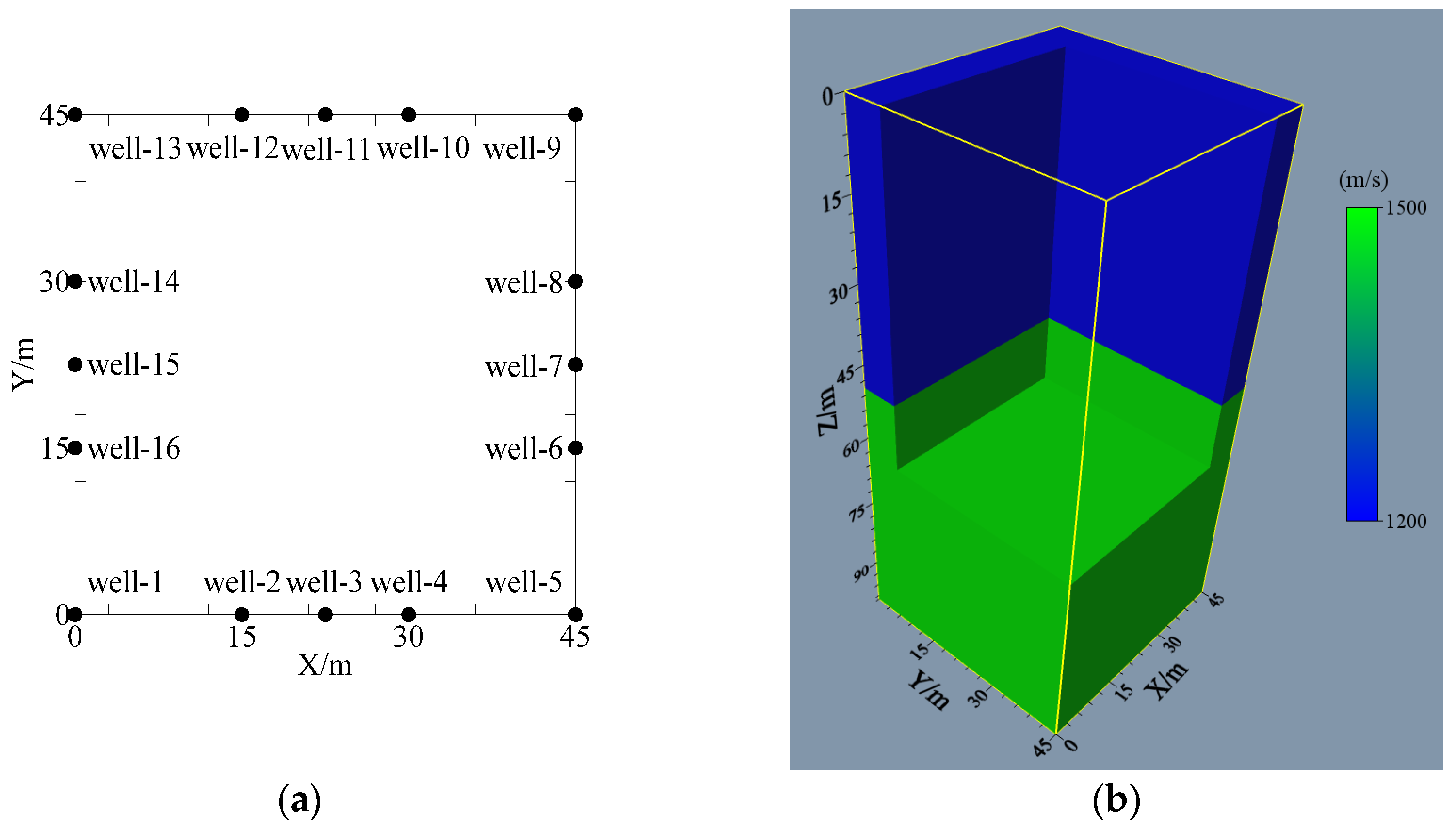
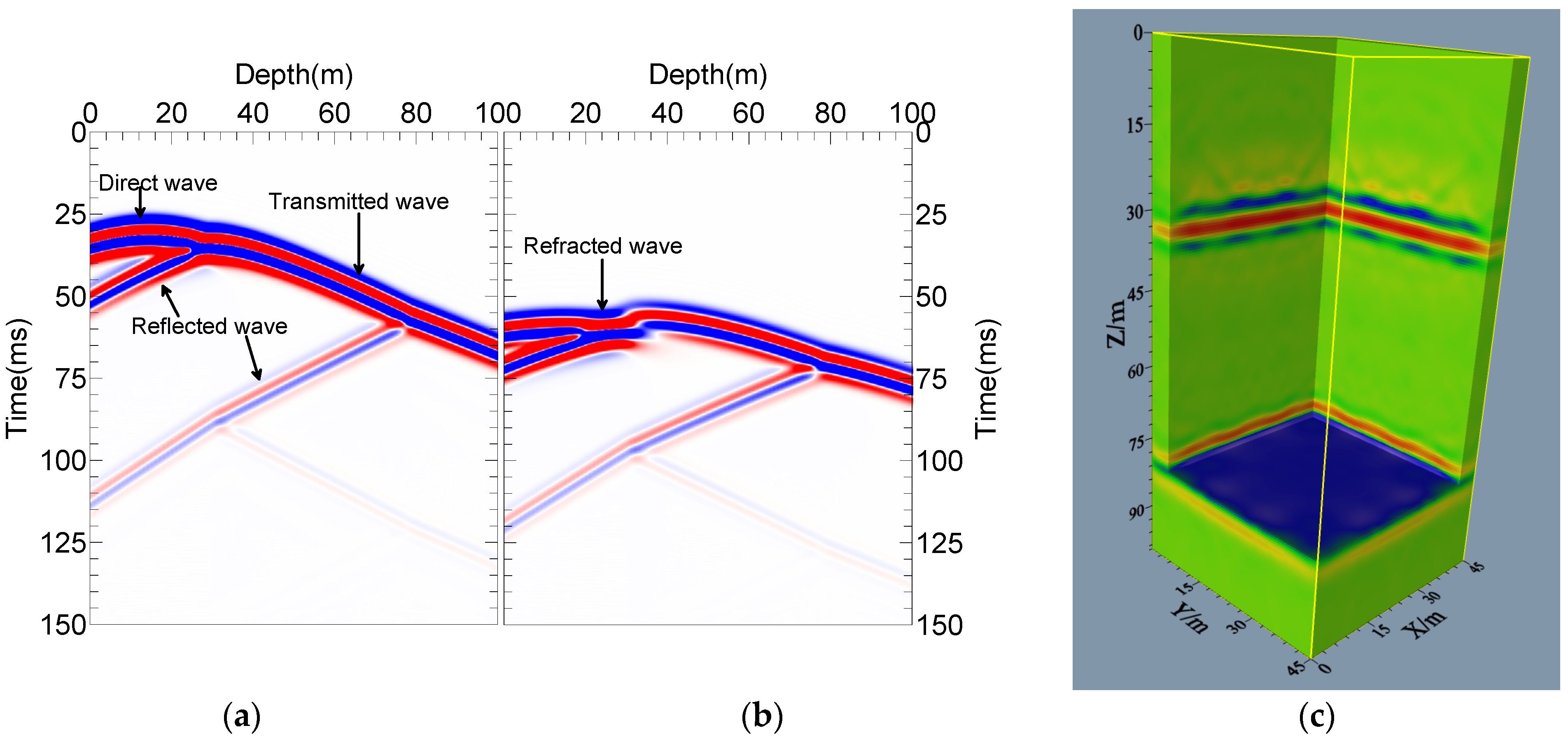
3.2. Design of the Theoretical Model
4. Verifications and Discussion
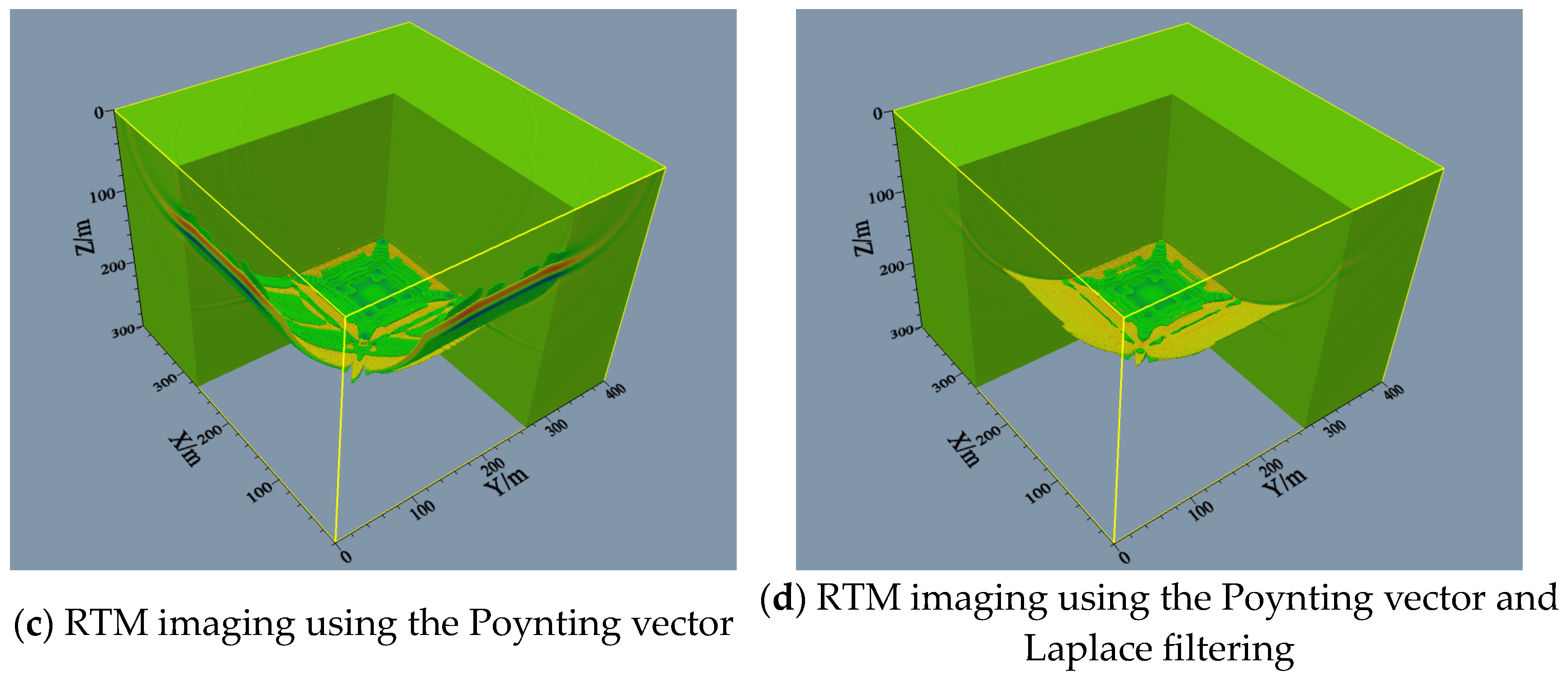
4.1. RTM Imaging Artifact Attenuation
4.2. Discussion of Observation System with Multiple Sensor Settings
5. Multiple Cross-Hole 3D RTM Image Results and Analysis
5.1. Model-1
5.2. Model-2
5.3. Model-3
5.4. Model-4
5.5. Imaging Results of Data Contaminated with Random Noise
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nakata, R.; Jang, U.G.; Lumley, D.; Mouri, T.; Nakatsukasa, M.; Takanashi, M.; Kato, A. Seismic Time-Lapse Monitoring of Near-Surface Microbubble Water Injection by Full Waveform Inversion. Geophys. Res. Lett. 2022, 49, e2022GL098734. [Google Scholar] [CrossRef]
- Ajo-Franklin, J.B.; Dou, S.; Lindsey, N.J.; Monga, I.; Tracy, C.; Robertson, M.; Rodriguez Tribaldos, V.; Ulrich, C.; Freifeld, B.; Daley, T.; et al. Distributed acoustic sensing using dark fiber for near-surface characterization and broadband seismic event detection. Sci. Rep. 2019, 9, 1328. [Google Scholar] [CrossRef]
- Wang, W.; Ma, J. Velocity model building in a crosswell acquisition geometry with image-trained artificial neural networks. Geophysics 2020, 85, U31–U46. [Google Scholar] [CrossRef]
- Angioni, T.; Rechtien, R.D.; Cardimona, S.J.; Luna, R. Crosshole seismic tomography and borehole logging for engineering site characterization in Sikeston, MO, USA. Tectonophysics 2003, 368, 119–137. [Google Scholar] [CrossRef]
- Rechtien, R.D.; Greenfield, R.J.; Ballard, R.F., Jr. Tunnel signature prediction for a cross-borehole seismic survey. Geophysics 1995, 60, 76–86. [Google Scholar] [CrossRef]
- Sagong, M.; Park, C.S.; Lee, B.; Chun, B.S. Cross-hole seismic technique for assessing in situ rock mass conditions around a tunnel. Int. J. Rock Mech. Min. Sci. 2012, 53, 86–93. [Google Scholar] [CrossRef]
- Marelli, S.; Manukyan, E.; Maurer, H.; Greenhalgh, S.A.; Green, A.G. Appraisal of waveform repeatability for crosshole and hole-to-tunnel seismic monitoring of radioactive waste repositories. Geophysics 2010, 75, Q21–Q34. [Google Scholar] [CrossRef]
- Binley, A.; Hubbard, S.S.; Huisman, J.A.; Revil, A.; Robinson, D.A.; Singha, K.; Slater, L.D. The emergence of hydrogeophysics for improved understanding of subsurface processes over multiple scales. Water Resour. Res. 2015, 51, 3837–3866. [Google Scholar] [CrossRef] [PubMed]
- Pongrac, B.; Gleich, D.; Malajner, M.; Sarjaš, A. Cross-Hole GPR for Soil Moisture Estimation Using Deep Learning. Remote Sens. 2023, 15, 2397. [Google Scholar] [CrossRef]
- Liu, Q.; Hu, L.; Bayer, P.; Xing, Y.; Qiu, P.; Ptak, T.; Hu, R. A numerical study of slug tests in a three-dimensional heterogeneous porous aquifer considering well inertial effects. Water Resour. Res. 2020, 56, e2020WR027155. [Google Scholar] [CrossRef]
- Moret GJ, M.; Knoll, M.D.; Barrash, W.; Clement, W.P. Investigating the stratigraphy of an alluvial aquifer using crosswell seismic traveltime tomography. Geophysics 2006, 71, B63–B73. [Google Scholar] [CrossRef][Green Version]
- Dietrich, P.; Tronicke, J. Integrated analysis and interpretation of cross-hole P-and S-wave tomograms: A case study. Near Surf. Geophys. 2009, 7, 101–109. [Google Scholar] [CrossRef]
- Peng, D.; Cheng, F.; Liu, J.; Zong, Y.; Yu, M.; Hu, G.; Xiong, X. Joint tomography of multi-cross-hole and borehole-to-surface seismic data for karst detection. J. Appl. Geophys. 2021, 184, 104252. [Google Scholar] [CrossRef]
- Li, G.; Cai, H.; Li, C.F. Alternating joint inversion of controlled-source electromagnetic and seismic data using the joint total variation constraint. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5914–5922. [Google Scholar] [CrossRef]
- Huang, G.; Chen, X.; Luo, C.; Bai, M.; Chen, Y. Time-lapse seismic difference-and-joint prestack AVA inversion. IEEE Trans. Geosci. Remote Sens. 2020, 59, 9132–9143. [Google Scholar] [CrossRef]
- da Silva, J.A., Jr.; Poliannikov, O.V.; Fehler, M.; Turpening, R. Modeling scattering and intrinsic attenuation of crosswell seismic data in the Michigan Basin. Geophysics 2018, 83, WC15–WC27. [Google Scholar] [CrossRef]
- Chen, H.; Hu, Y.; Jin, J.; Ran, Q.; Yan, L. Fine stratigraphic division of volcanic reservoir by uniting of well data and seismic data—Taking volcanic reservoir of member one of Yingcheng Formation in Xudong area of Songliao Basin for an example. J. Earth Sci. 2014, 25, 337–347. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, Z.; Wang, L.; Cui, H.; Xie, X.; Wu, H.; Liu, X.; Gao, B.; Wang, H.; Xiang, P. A Quasi-Distributed optic fiber sensing approach for interlayer performance analysis of ballastless Track-Type II plate. Opt. Laser Technol. 2024, 170, 110237. [Google Scholar] [CrossRef]
- Egorov, A.; Pevzner, R.; Bóna, A.; Glubokovskikh, S.; Puzyrev, V.; Tertyshnikov, K.; Gurevich, B. Time-lapse full waveform inversion of vertical seismic profile data: Workflow and application to the CO2CRC Otway project. Geophys. Res. Lett. 2017, 44, 7211–7218. [Google Scholar] [CrossRef]
- Grana, D.; Liu, M.; Ayani, M. Prediction of CO₂ Saturation Spatial Distribution Using Geostatistical Inversion of Time-Lapse Geophysical Data. IEEE Trans. Geosci. Remote Sens. 2020, 59, 3846–3856. [Google Scholar] [CrossRef]
- White, D.; Daley, T.M.; Paulsson, B.; Harbert, W. Borehole seismic methods for geologic CO2 storage monitoring. Lead. Edge 2021, 40, 434–441. [Google Scholar] [CrossRef]
- Cheng, F.; Liu, J.; Wang, J.; Zong, Y.; Yu, M. Multi-hole seismic modeling in 3-D space and cross-hole seismic tomography analysis for boulder detection. J. Appl. Geophys. 2016, 134, 246–252. [Google Scholar] [CrossRef]
- Becht, A.; Bürger, C.; Kostic, B.; Appel, E.; Dietrich, P. High-resolution aquifer characterization using seismic cross-hole tomography: An evaluation experiment in a gravel delta. J. Hydrol. 2007, 336, 171–185. [Google Scholar] [CrossRef]
- Lin, J.; Ma, R.; Sun, Z.; Tang, L. Assessing the Connectivity of a Regional Fractured Aquifer Based on a Hydraulic Conductivity Field Reversed by Multi-Well Pumping Tests and Numerical Groundwater Flow Modeling. J. Earth Sci. 2023, 34, 1926–1939. [Google Scholar] [CrossRef]
- Wang, H.; Lin, C.P.; Liu, H.C. Pitfalls and refinement of 2D cross-hole electrical resistivity tomography. J. Appl. Geophys. 2020, 181, 104143. [Google Scholar] [CrossRef]
- Guan, P.; Shao, C.; Jiao, Y.; Zhang, G.; Li, B.; Zhou, J.; Huang, P. 3-D Multi-Component Reverse Time Migration Method for Tunnel Seismic Data. Sensors 2021, 21, 3244. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.C.; Qu, Y.M. Research progress on seismic imaging technology. Pet. Sci. 2022, 19, 128–146. [Google Scholar] [CrossRef]
- Douma, H.; Yingst, D.; Vasconcelos, I.; Tromp, J. On the connection between artifact filtering in reverse-time migration and adjoint tomography. Geophysics 2010, 75, S219–S223. [Google Scholar] [CrossRef]
- Zhong, Y.; Gu, H.; Liu, Y.; Luo, X.; Mao, Q. Elastic reverse time migration method in vertical transversely isotropic media including surface topography. Geophys. Prospect. 2022, 70, 1528–1555. [Google Scholar] [CrossRef]
- Huang, S.; Trad, D. Convolutional Neural-Network-Based Reverse-Time Migration with Multiple Reflections. Sensors 2023, 23, 4012. [Google Scholar] [CrossRef]
- Moradpouri, F.; Moradzadeh, A.; Pestana, R.; Ghaedrahmati, R.; Soleimani Monfared, M. An improvement in wavefield extrapolation and imaging condition to suppress reverse time migration artifacts. Geophysics 2017, 82, S403–S409. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, X.; Harris, J.M.; Zhou, H. Crosswell seismic imaging using Q-compensated viscoelastic reverse time migration with explicit stabilization. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Zhai, J.; Wang, Q.; Xie, X.; Qin, H.; Zhu, T.; Jiang, Y.; Ding, H. A New Method for 3D Detection of Defects in Diaphragm Walls during Deep Excavations Using Cross-Hole Sonic Logging and Ground-Penetrating Radar. J. Perform. Constr. Facil. 2023, 37, 04022065. [Google Scholar] [CrossRef]
- Luo, N.; Zhao, Z.; Illman, W.A.; Zha, Y.; Mok, C.M.; Yeh, T.C. Three-Dimensional Steady-State Hydraulic Tomography Analysis with Integration of Cross-Hole Flowmeter Data at a Highly Heterogeneous Site. Water Resour. Res. 2023, 59, e2022WR034034. [Google Scholar] [CrossRef]
- Cao, L.; Li, X.; Cao, H.; Liu, L.; Wei, T.; Yang, X. 3-D Crosswell electromagnetic inversion based on IRLS norm sparse optimization algorithms. J. Appl. Geophys. 2023, 214, 105072. [Google Scholar] [CrossRef]
- Wang, X.; Shen, J.; Su, B. 3-D crosswell electromagnetic inversion based on general measures. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9783–9795. [Google Scholar] [CrossRef]
- Yang, J.; He, X.; Chen, H. Crosswell frequency-domain reverse time migration imaging with wavefield decomposition. J. Geophys. Eng. 2023, 20, 1279–1290. [Google Scholar] [CrossRef]
- Zhu, T.; Harris, J.M. Improved seismic image by Q-compensated reverse time migration: Application to crosswell field data, west Texas. Geophysics 2015, 80, B61–B67. [Google Scholar] [CrossRef]
- Neklyudov, D.; Borodin, I. Imaging of offset VSP data acquired in complex areas with modified reverse-time migration. Geophys. Prospect. 2009, 57, 379–391. [Google Scholar] [CrossRef]
- Wu, B.; Xie, Q.; Wu, B. Seismic impedance inversion based on residual attention network. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- You, J.; Pan, N.; Liu, W.; Cao, J. Efficient wavefield separation by reformulation of two-way wave-equation depth-extrapolation scheme. Geophysics 2022, 87, S209–S222. [Google Scholar] [CrossRef]
- Chang, W.F.; Mcmechan, G.A. Reverse-time migration of offset vertical seismic profiling data using the excitation-time imaging condition. Geophysics 1986, 51, 67–84. [Google Scholar] [CrossRef]
- Cunha, C.; Ritter, G.; Sardinha, A.; Dias, B.P.; Guerra, C.; Thedy, F.; Hargreaves, N.; Coacci, R. Multi-image, reverse-time and Kirchhoff migrations with compact Green′ s functions. Geophysics 2023, 89, S99–S118. [Google Scholar] [CrossRef]
- Sethian, J.A.; Popovici, A.M. 3-D traveltime computation using the fast marching method. Geophysics 1999, 64, 516–523. [Google Scholar] [CrossRef]
- Dugan, J.; Smy, T.J.; Gupta, S. Accelerated ie-gstc solver for large-scale metasurface field scattering problems using fast multipole method (fmm). IEEE Trans. Antennas Propag. 2022, 70, 9524–9533. [Google Scholar] [CrossRef]
- Wang, H.; Li, M.; Fang, Z.; Shi, S.; Liu, T.; Tao, A. Cased-hole reverse time migration imaging using ultrasonic pitch-catch measurement: Theory and synthetic case studies. Geophysics 2023, 88, D241–D258. [Google Scholar] [CrossRef]
- Moradpouri, F.; Moradzadeh, A.; Pestana, R.C.; Soleimani Monfared, M. Seismic reverse time migration using a new wave-field extrapolator and a new imaging condition. Acta Geophys. 2016, 64, 1673–1690. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Well-1 | Well-2 | Well-3 | Well-4 | Well-5 | Well-6 | Well-7 | Well-8 | Well-9 | Well-10 | Well-11 | Well-12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X (m) | 0.0 | 15.0 | 30.0 | 45.0 | 45.0 | 45.0 | 45.0 | 30.0 | 15.0 | 0.0 | 0.0 | 0.0 |
| Y (m) | 0.0 | 0.0 | 0.0 | 0.0 | 15.0 | 30.0 | 45.0 | 45.0 | 45.0 | 45.0 | 30.0 | 15.0 |
| NO. | I | II | III | IV |
|---|---|---|---|---|
| Vp (m/s) | 1200.0 | 1500.0 | 1800.0 | 2000.0 |
| ρ (kg/m3) | 1800.0 | 2000.0 | 2200.0 | 2300.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, F.; Peng, D.; Yang, S. 3D Reverse-Time Migration Imaging for Multiple Cross-Hole Research and Multiple Sensor Settings of Cross-Hole Seismic Exploration. Sensors 2024, 24, 815. https://doi.org/10.3390/s24030815
Cheng F, Peng D, Yang S. 3D Reverse-Time Migration Imaging for Multiple Cross-Hole Research and Multiple Sensor Settings of Cross-Hole Seismic Exploration. Sensors. 2024; 24(3):815. https://doi.org/10.3390/s24030815
Chicago/Turabian StyleCheng, Fei, Daicheng Peng, and Sansheng Yang. 2024. "3D Reverse-Time Migration Imaging for Multiple Cross-Hole Research and Multiple Sensor Settings of Cross-Hole Seismic Exploration" Sensors 24, no. 3: 815. https://doi.org/10.3390/s24030815
APA StyleCheng, F., Peng, D., & Yang, S. (2024). 3D Reverse-Time Migration Imaging for Multiple Cross-Hole Research and Multiple Sensor Settings of Cross-Hole Seismic Exploration. Sensors, 24(3), 815. https://doi.org/10.3390/s24030815