
Numerical Analysis for Appropriate Positioning of Ferrous Wear Debris Sensors with Permanent Magnet in Gearbox Systems


Abstract

1. Introduction
2. Numerical Model and Methods
3. Numerical Results and Discussions
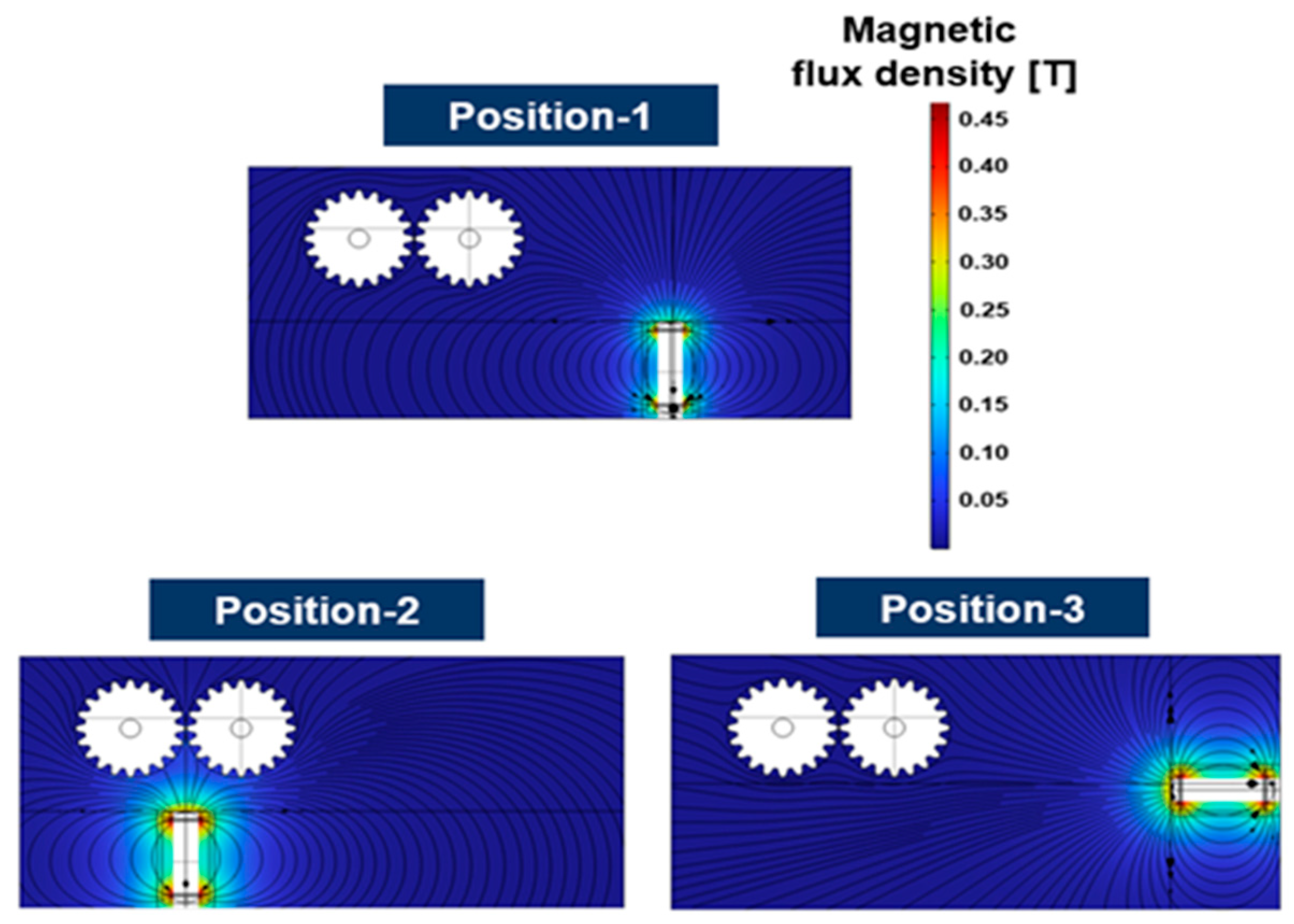
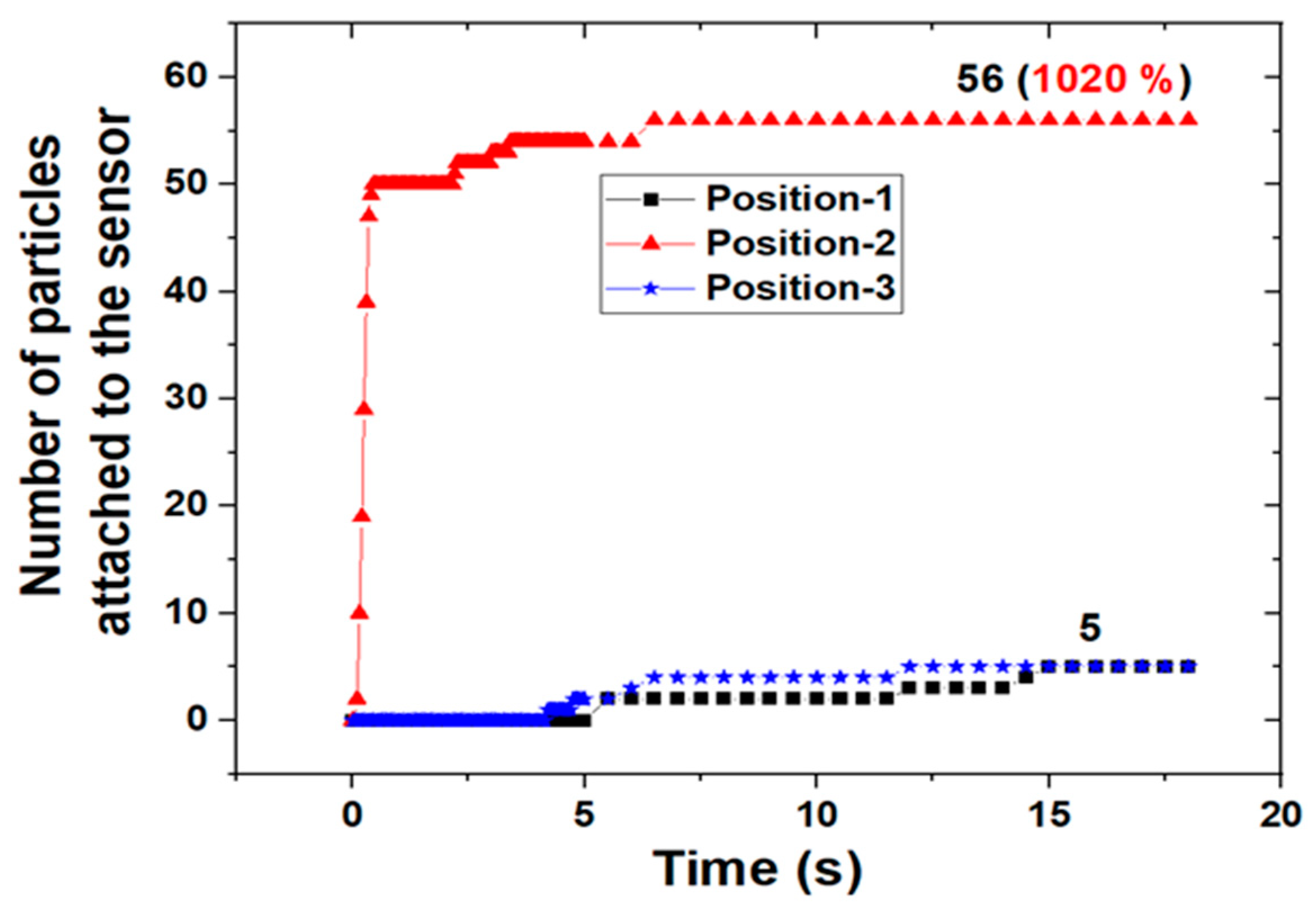
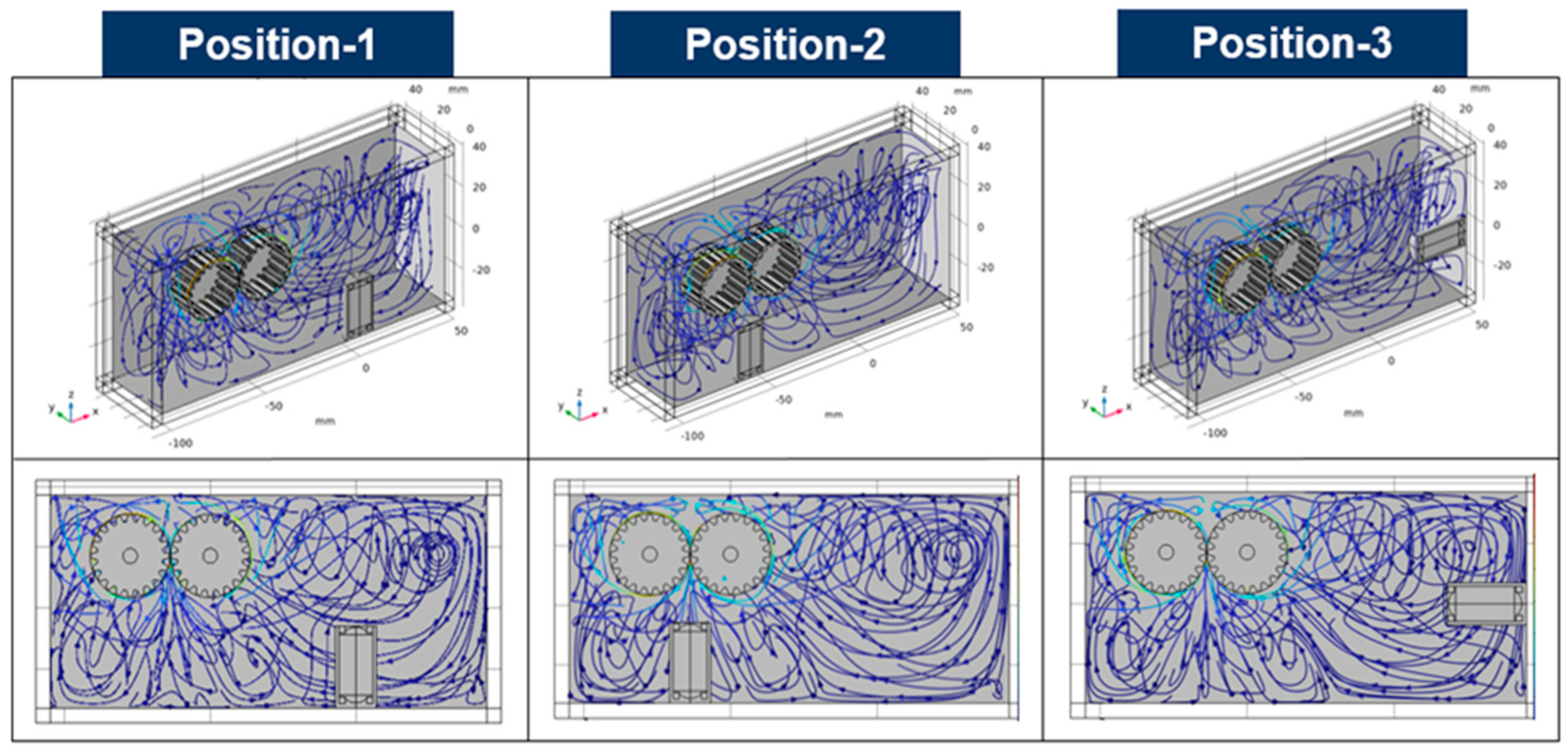
3.1. Sensitivity Evaluation According to the Sensor Position
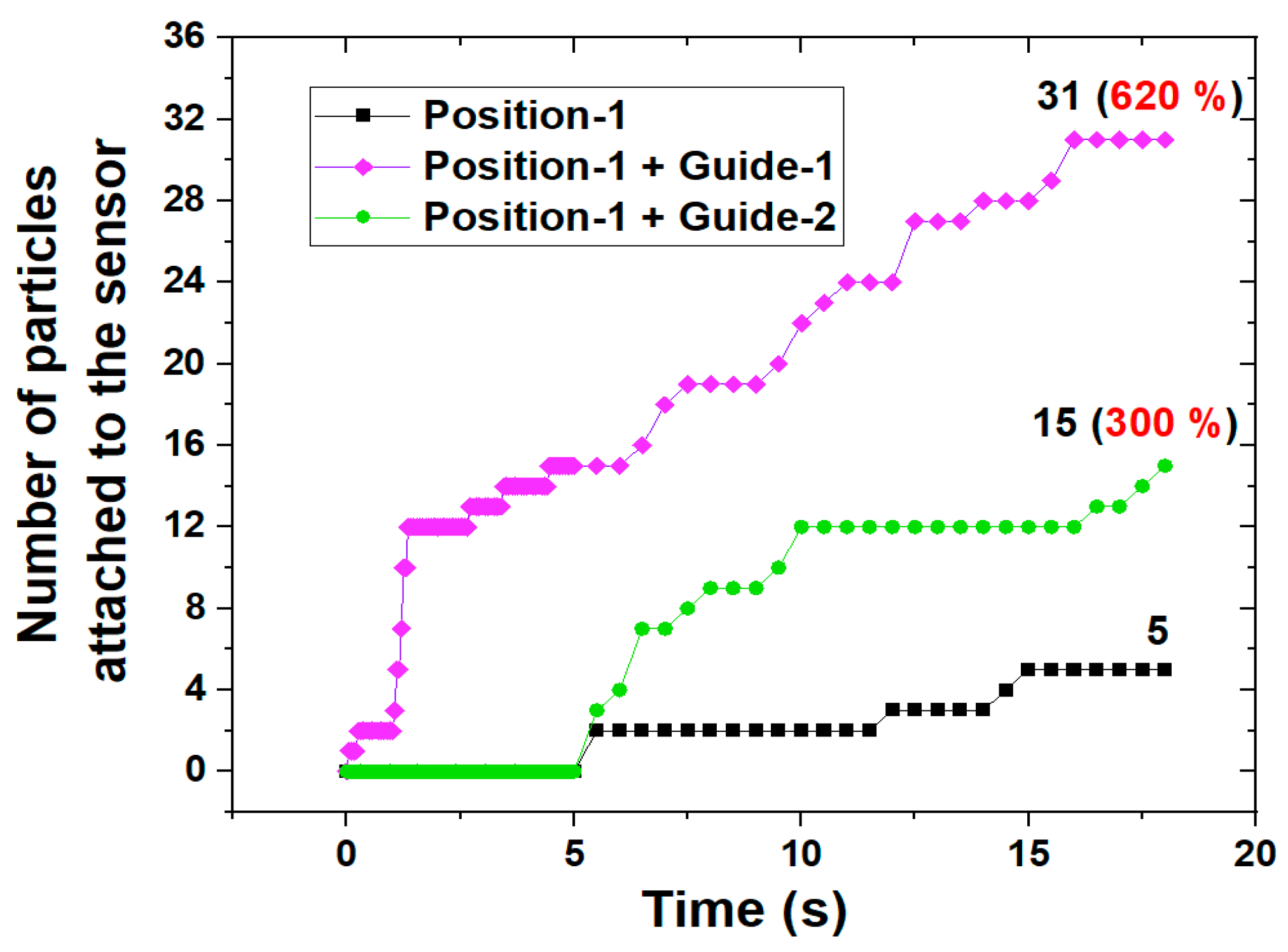
3.2. Improvement of Sensitivity Using a Flow Guide Wall
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- ISO 14224; Petroleum, Petrochemical and Natural Gas Industries-Collection and Exchange of Reliability and Maintenance Data for Equipment. ISO Standard: Geneva, Switzerland, 2006.
- Velmurugan, R.S.; Dhingra, T. Maintenance strategy selection and its impact in maintenance function: A conceptual framework. Int. J. Oper. Prod. Manag. 2015, 35, 1622–1661. [Google Scholar] [CrossRef]
- Pintelon, L.M.; Parodi-Herz, A. Maintenance: An Evolutionary Perspective, Complex System Maintenance Handbook (Series in Reliability Engineering); Springer: London, UK, 2008; p. 22. [Google Scholar]
- Luo, J.; Yu, D.; Liang, M. Enhancement of oil particle sensor capability via resonance-based signal decomposition and fractional calculus. Measurement 2015, 76, 240–254. [Google Scholar] [CrossRef]
- Kumur, P.; Hirani, H. Misailgnment effect on gearbox failure: An experimental study. Measurement 2021, 169, 108492. [Google Scholar] [CrossRef]
- Praveen, H.M.; Sabareesh, G.H.; Inturi, V.; Jaikanth, A. Component level signal segmentation method for multi-component fault detection in a wind turbine gearbox. Measurement 2022, 195, 111180. [Google Scholar] [CrossRef]
- Hong, S.H.; Jeon, H.G. Monitoring the conditions of hydraulic oil with integrated oil sensors in construction equipment. Lubricants 2022, 10, 278. [Google Scholar] [CrossRef]
- Li, W.; Bai, C.; Wang, C.; Zhang, H.; Ilerioluwa, L.; Wang, X.; Yu, S.; Li, G. Design and research of inductive oil pollutant detection sensor based on high gradient magnetic field structure. Micromachines 2021, 12, 638. [Google Scholar] [CrossRef]
- Zeng, L.; Zhang, H.; Wang, Q.; Zhang, X. Monitoring of non-ferrous debris in hydraulic oil by detecting the equivalent resistance of inductive sensors. Micromachines 2018, 9, 117. [Google Scholar] [CrossRef]
- Hong, S.H.; Jeon, H.G. Assessment of condition diagnosis system for axles with ferrous particle sensor. Materials 2023, 16, 1426. [Google Scholar] [CrossRef]
- Hong, S.H. Numerical Approach and Verification Method for Improving Sensitivity of Ferrous Particle Sensors with Permanent. Sensors 2023, 23, 5381. [Google Scholar] [CrossRef]
- Ren, Y.; Li, W.; Zhao, G.; Feng, Z. Inductive debris sensor using one energizing coil with multiple sensing coils for sensitivity improvement and high throughput. Tribol. Int. 2018, 128, 96–98. [Google Scholar] [CrossRef]
- Xiao, H.; Wang, X.; Li, H.; Luo, J.; Fong, S. An Inductive debris sensor for large-diameter lubricating oil circuit based on a high-gradient magnetic field. Appl. Sci. 2019, 9, 1546. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, H.; Qiao, W.; Han, X.; Zeng, L.; Shi, H. Oil metal debris detection sensor using ferrite core and flat channel for sensitivity improvement and high throughput. IEEE Sens. J. 2020, 20, 7303–7307. [Google Scholar] [CrossRef]
- Zeng, L.; Yu, Z.; Zhang, H.; Zhang, X.; Chen, H. A high sensitive multi-parameter micro sensor for detection of multi-contamination in hydraulic oil. Sens. Actuators A Phys. 2018, 282, 197–199. [Google Scholar] [CrossRef]
- Jia, R.; Ma, B.; Zheng, C.; Ba, X.; Wang, L.; Du, Q.; Wang, K. Compressive improvement of the sensitivity and detectability of a large-aperture electromagnetic wear particle detector. Sensors 2019, 19, 3162. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.; Zhang, H.; Zheng, W.; Shi, H.; Wang, C.; Xie, Y. Investigation on the effect of debris position on the sensitivity of the inductive debris sensor. IEEE Sens. J. 2023, 23, 4438–4444. [Google Scholar] [CrossRef]
- Chaiendoo, K.; Tuntulani, T.; Ngeontae, W. A highly selective colorimetric sensor for ferrous ion based on polymethylacrylic acid-templated silver nanoclusters. Sens. Actuators B Chem. 2015, 207, 658–667. [Google Scholar] [CrossRef]
- Chaiendoo, K.; Tuntulani, T.; Ngeontae, W. A paper-based ferrous ion sensor fabricated from an ion exchange polymeric membrane coated on a silver nanocluster-impregnated filter paper. Mater. Chem. Phys. 2017, 199, 272–278. [Google Scholar] [CrossRef]
- Patocka, F.; Schlogl, M.; Schneidhofer, C.; Dorr, N.; Schneider, M.; Schmid, U. Piezoelectrically excited MEMS sensor with integrated planar coil for the detection of ferrous particles in liquids. Sens. Actuators B Chem. 2019, 299, 126957. [Google Scholar] [CrossRef]
- Yasukawa, T.; Yamada, J.; Shiku, H.; Mizutani, F.; Matsue, T. Positioning of cells flowing in a fluidic channel by negative dielectrophoresis. Sens. Actuators B Chem. 2013, 186, 9–16. [Google Scholar] [CrossRef]
- Wu, H.; Dong, L.; Ren, W.; Yin, W.; Ma, W.; Zhang, L.; Jia, S.; Tittel, F.K. Position effect of acoustic micro-resonator in quartz enhanced photoacoustic spectroscophy. Sens. Actuators B Chem. 2015, 206, 364–367. [Google Scholar] [CrossRef]
- Zhang, F.; Sun, Y.; Wan, Q. Calibrating the error from sensor position uncertainty in TDOA-AOA localization. Signal Process. 2020, 166, 107213. [Google Scholar] [CrossRef]
- Bassignana, D.; Curras, E.; Fernandez, M.; Jaramillo, R.; Lezano, M.; Munoz, F.J.; Pellegrini, G.; Quirion, D.; Vila, I.; Vitorero, F. 2D position sensitive microstrip sensors with charge division along the strip: Studies on the position measurement error. Nucl. Instrum. Methods Phys. Res. 2013, 732, 186–189. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, W.; Yang, B.; Li, S. An auxiliary source-based near field source localization method with sensor position error. Signal Process. 2023, 209, 109039. [Google Scholar] [CrossRef]
- Qiu, F.; Zhang, W. Position error vs. signal measurements: An analysis towards lower error bound in sensor network. Digit. Signal Process. 2022, 129, 103637. [Google Scholar] [CrossRef]
- Byun, E.; Lee, J. Vision-based virtual sensor using error calibration convolutional neural network with signal augmentation. Mech. Syst. Signal Process. 2023, 200, 110607. [Google Scholar] [CrossRef]
- Jia, T.; Liu, H.; Wang, P.; Wang, R.; Gao, C. Sensor error calibration and optimal geometry analysis of calibrators. Signal Process. 2024, 214, 109249. [Google Scholar] [CrossRef]
- Dong, L.; Cao, H.; Hu, Q.; Zhang, S.; Zhang, X. Error distribution and influencing factors of acoustic emission source location for sensor rectangular network. Measurement 2024, 225, 113983. [Google Scholar] [CrossRef]
- El-Zarif, N.; Amer, M.; Ali, M.; Hassan, A.; Oukaira, A.; Fayomi, C.J.B.; Savaria, Y. Calibration of ring oscillator-based integrated temperature sensors for power management systems. Sensors 2024, 24, 440. [Google Scholar] [CrossRef] [PubMed]
- Rogala, T.; Ścieszka, M.; Katunin, A.; Ručevskis, S. Genetic multi-objective optimization of sensor placement for SHM of Composite Structures. Appl. Sci. 2024, 14, 456. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Lu, F.; Wang, X. The segmentation of wear particles in ferrograph images based on an improved ant colony algorithm. Wear 2014, 311, 123–129. [Google Scholar] [CrossRef]
- Zhu, X.; Du, L.; Zhe, J. A 3 × 3 wear debris sensor array for real time lubricant oil condition monitoring using synchronized sampling. Mech. Syst. Signal Process. 2017, 83, 296–304. [Google Scholar] [CrossRef]
- Urban, A.; Zhe, J. A microsensor array for diesel engine lubricant monitoring using deep learning with stochastic global optimization. Sens. Actuators A Phys. 2022, 343, 113671. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| a [mm] | 20 | f [mm] | 3.75 |
| b [mm] | 5.8 | g [mm] | 0.5 |
| c [mm] | 2.2 | h [mm] | 0.4 |
| d [mm] | 2.05 | r1 [mm] | 5 |
| e [mm] | 2.5 |
| Items | Conditions | Items | Conditions |
|---|---|---|---|
| Particle diameter | 10 μm | Number of particles | 450 |
| Particle material | Steel | Particle shape | Sphere |
| Particle density | 7800 kg/m3 | Relative permeability of the particle | 1000 |
| Dynamic viscosity of the lubricant | 0.04 Pa·s | Density of the lubricant | 870 kg/m3 |
| Number of teeth in the gear | 20 | Rotational speed of the gears | 1000 rpm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, S.-H. Numerical Analysis for Appropriate Positioning of Ferrous Wear Debris Sensors with Permanent Magnet in Gearbox Systems. Sensors 2024, 24, 810. https://doi.org/10.3390/s24030810
Hong S-H. Numerical Analysis for Appropriate Positioning of Ferrous Wear Debris Sensors with Permanent Magnet in Gearbox Systems. Sensors. 2024; 24(3):810. https://doi.org/10.3390/s24030810
Chicago/Turabian StyleHong, Sung-Ho. 2024. "Numerical Analysis for Appropriate Positioning of Ferrous Wear Debris Sensors with Permanent Magnet in Gearbox Systems" Sensors 24, no. 3: 810. https://doi.org/10.3390/s24030810
APA StyleHong, S.-H. (2024). Numerical Analysis for Appropriate Positioning of Ferrous Wear Debris Sensors with Permanent Magnet in Gearbox Systems. Sensors, 24(3), 810. https://doi.org/10.3390/s24030810