
Designing a Surveillance Sensor Network with Information Clearinghouse for Advanced Air Mobility


Abstract
1. Introduction
1.1. Advanced Air Mobility
1.2. Motivation and Contributions
1.2.1. Surveillance Sensor Network Design for Advanced Air Mobility
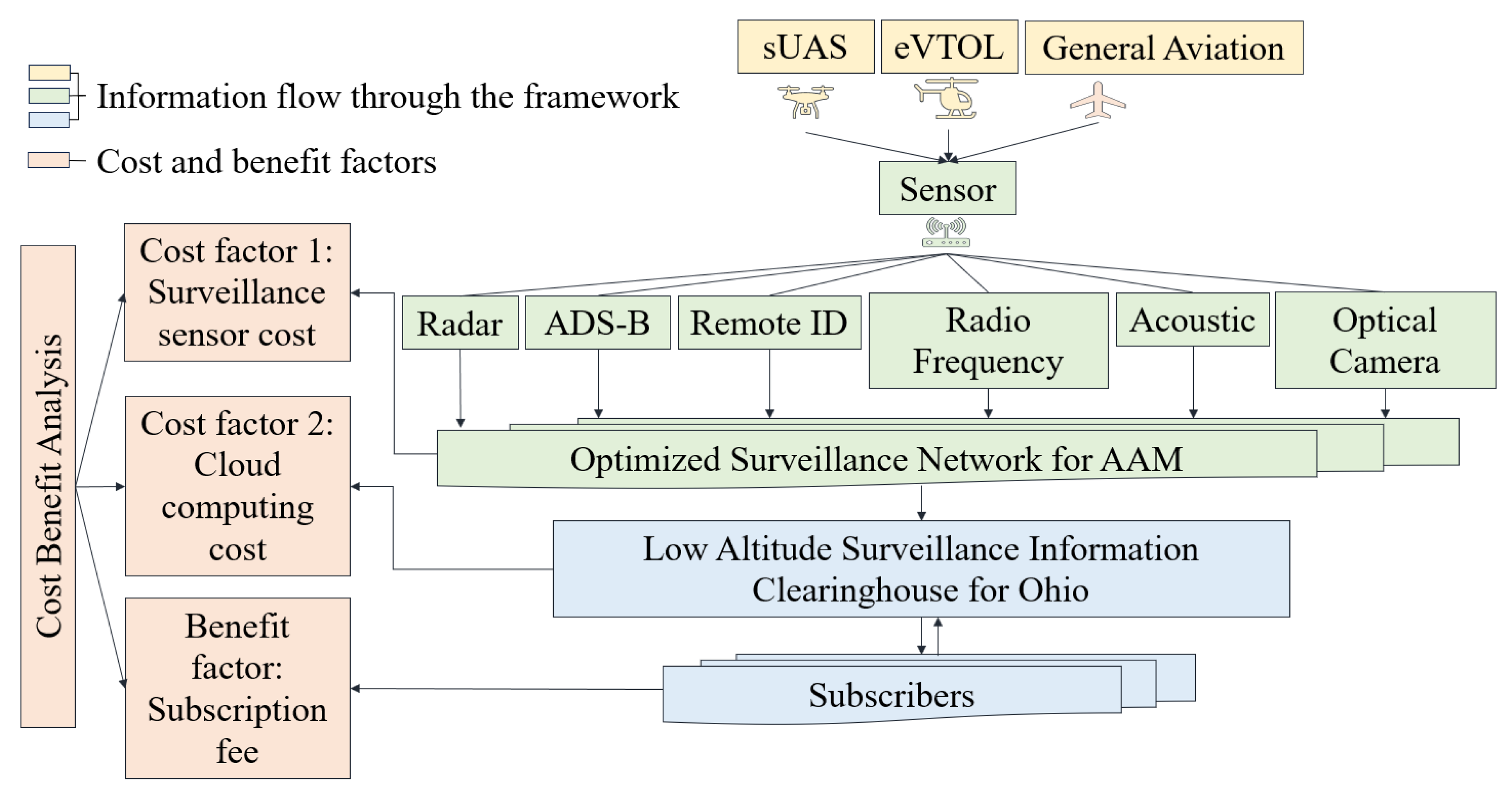
1.2.2. Low Altitude Surveillance Information Clearinghouse
1.2.3. Summary of Contributions
- (a)
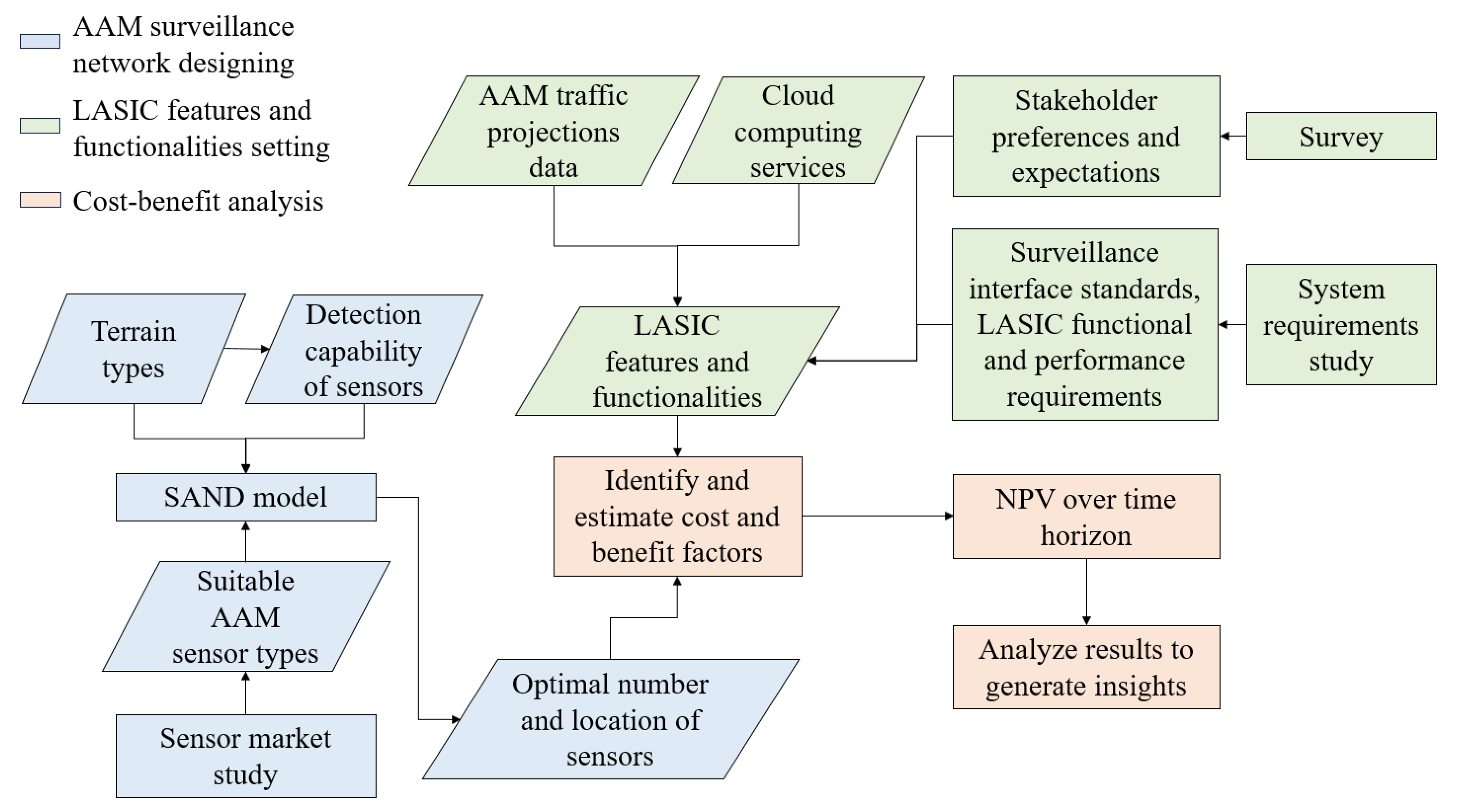
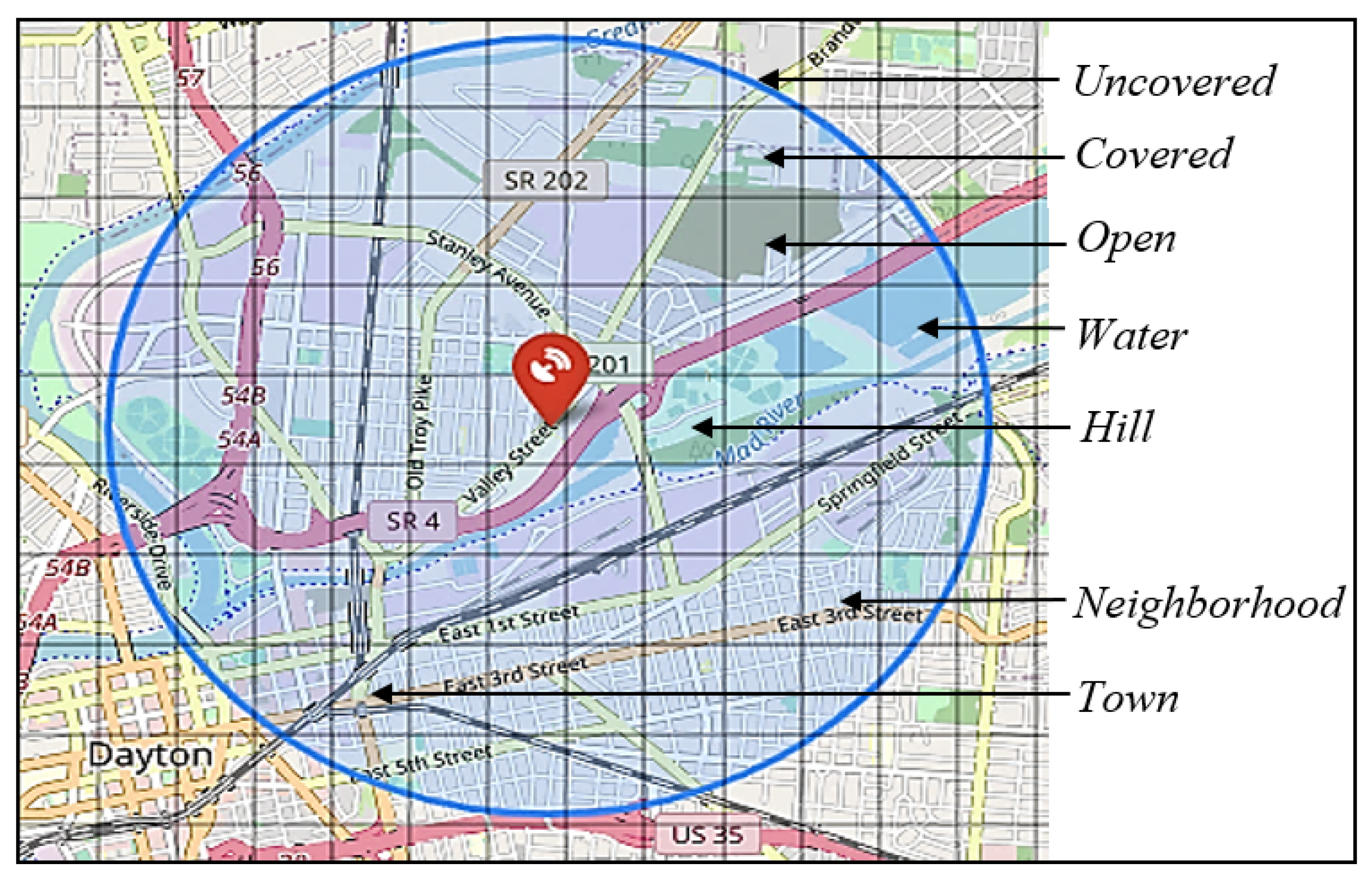
- We developed the SAND model, which can determine the optimal locations for sensor deployment to design a comprehensive AAM surveillance network that minimizes the total sensor cost. The SAND model can provide full coverage in the desired AAM surveillance areas and considers terrain types within those regions, as well as terrain-based sensor detection probabilities and minimum detection probability requirements. We considered the State of Ohio as our case study and applied the SAND model to design an AAM surveillance network there.
- (b)
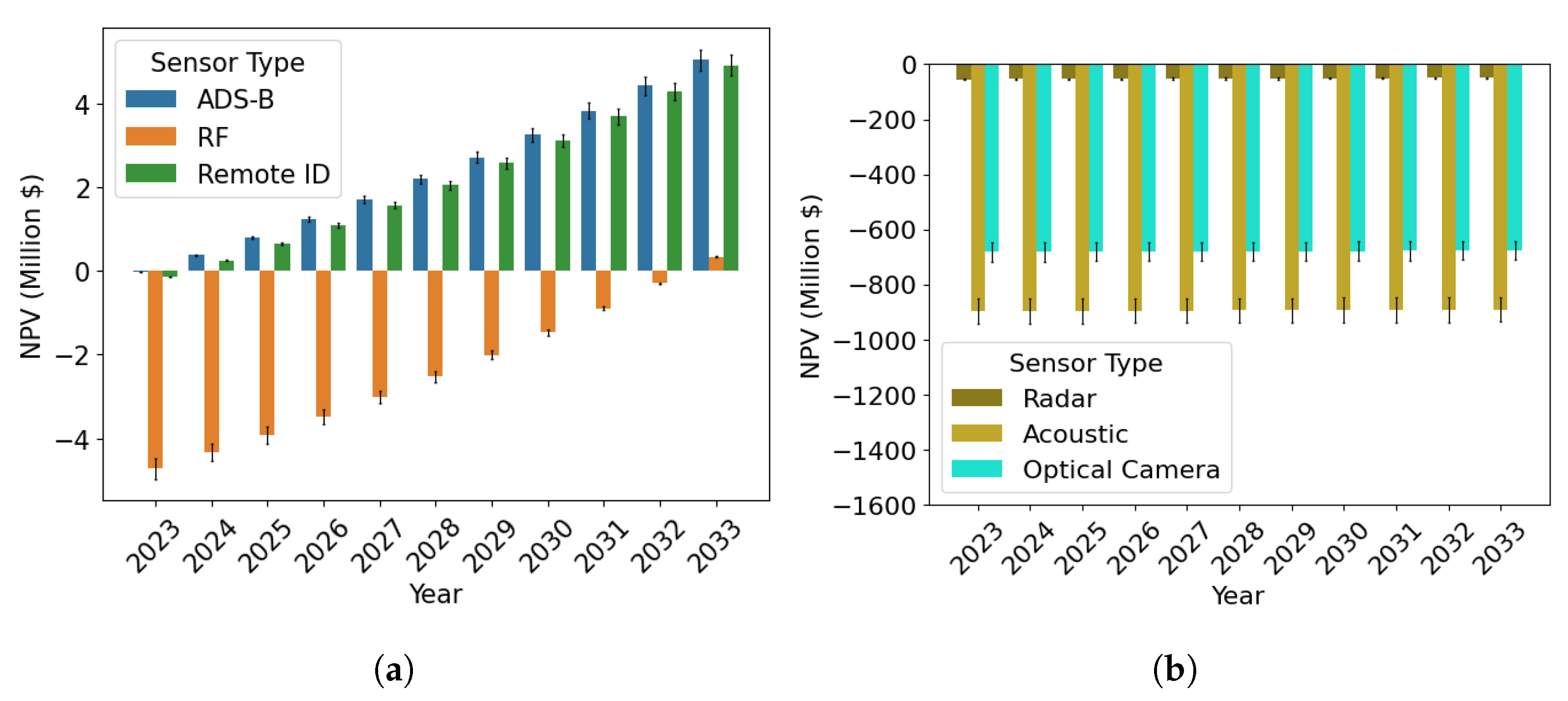
- We considered several sensor types, such as radar, radio frequency, ADS–B, remote ID, optical, and acoustic sensors, to design two types of AAM surveillance sensor networks: homogeneous and heterogeneous. Our analysis of homogeneous sensor placement indicates that ADS–B and remote identification sensor types are the most profitable options for detecting cooperative aircraft, whereas the radio frequency sensor type is the most profitable option for tracking both cooperative and non-cooperative aircraft. According to the findings, implementing a heterogeneous sensor network composed of various sensor types is more cost-effective in reducing the overall sensor cost compared to a homogeneous sensor network that employs only one type of sensor.
- (c)
- We present a cloud-hosted LASIC framework, which allows for the managing and sharing of AAM surveillance traffic data. We computed the cost of operating the framework while considering the AAM traffic projections and relevant surveillance data generated in the AAM surveillance areas in Ohio, as well as the surveillance data types, interface standards, data sizes, cloud components, and cloud pricing policies.
- (d)
- We conducted a rigorous cost–benefit analysis of the proposed AAM surveillance network and LASIC implementation for the State of Ohio to determine the break-even points for different sensor types. We considered the uncertainty associated with AAM demand to determine the possible range of costs, revenue, and NPV for the AAM surveillance network and LASIC.
- (e)
- We performed a sensitivity analysis on the key parameters of our study, including the subscription fees, number of initial subscribers, terrain-based sensor detection probabilities, and minimum required detection probability. The insights demonstrate that changes in these parameters significantly impact the number of sensors required, total sensor cost, and NPVs of the results generated from the study. Our study provides policymakers with valuable insights to make informed decisions regarding investment in an AAM surveillance network and LASIC.
1.3. Outline of the Paper
2. Literature Review
2.1. AAM Surveillance
2.2. Location Selection Problems and Surveillance Network Design
2.3. Our Contributions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | [42] | [50] | [53] | [52] | [54] | [55] | [51] | Our Study | |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Multi-type sensors | X | ✓ | X | X | X | X | X | ✓ |
| 2 | Probability of misdetection of sensors | ✓ | ✓ | X | X | X | X | X | ✓ |
| 3 | Detection probability of sensors based on terrain types | X | ✓ | X | X | X | X | ✓ | ✓ |
| 4 | Multi-city | X | X | X | X | X | X | ✓ | ✓ |
| 5 | Maximum number of blocks | 20 × 20 | 81 × 81 | 30 × 30 | 90 × 90 | 50 × 100 | 90 × 90 | 120 × 200 | 130 × 126 |
| 6 | Adaptability to irregular shape of surveillance area | X | X | X | X | X | X | X | ✓ |
| 7 | Exclusion of infeasible blocks from candidate sensor locations | X | ✓ | X | X | ✓ | X | ✓ | ✓ |
| 8 | Minimum required detection probability constraint | ✓ | ✓ | X | X | X | X | X | ✓ |
| 9 | Full coverage constraint | X | X | X | X | X | X | X | ✓ |
| 10 | Guarantee of global optimum solutions | X | ✓ | X | X | X | X | X | ✓ |
| 11 | Connection to LASIC | X | X | X | X | X | X | X | ✓ |
| 12 | Cost–benefit analysis of AAM surveillance network and LASIC infrastructure | X | X | X | X | X | X | X | ✓ |
3. Methodology
3.1. Surveillance Sensor Network Design for Advanced Air Mobility
3.1.1. Surveillance Sensor Types
- Radar: Both cooperative and non-cooperative aircraft can be detected and tracked using ground-based radars. The radar transmits the electromagnetic waves signal towards aircraft, which bounce off the aircraft and create a detailed image of its size, shape, and location. The radar cross-section (RCS) signature of each aircraft type is distinctive, which leads to varying reflection patterns of radio waves. The radar utilizes these patterns to identify the aircraft type and determine its position, velocity, and travel direction.
- Automatic Dependent Surveillance–Broadcast: Automatic Dependent Surveillance–Broadcast (ADS–B) is a surveillance system that allows an aircraft to periodically broadcast and track its location via satellite navigation. Currently, the FAA acknowledges ADS–B as a key enabler for trajectory-based air traffic management in the future.
- Remote ID: The ability of sUAS and eVTOL to broadcast identification and location data during flights is known as remote identification (remote ID).
- Radio Frequency: Like the radar, the RF sensor is also able to accurately detect and categorize aircraft. However, RF sensors can detect and track small drones that may not be detectable by radar, particularly at low altitudes where the radar signal may not reflect off the drone as effectively as it would off a larger aircraft. Also, RF sensors can be more effective than radar in urban or cluttered environments, where there may be many buildings, trees, and other obstacles that can reflect or absorb radar signals. RF sensors are less affected by these obstacles because their signals can penetrate walls and other structures, making them useful for monitoring drones in indoor or urban environments. The key advantages of the RF sensor system include its low cost, ease of installation, and simplicity of integration with several other sensors, including cameras and radars.
- Acoustic: An audio pattern that is transmitted by an aircraft’s propeller can be detected by acoustic sensors and used for aircraft positioning and classification. It uses passive acoustic sensor technology with no RF emissions, whereas the solid-state sensor is an array module that includes digital microphones and digital processors.
- Electro-Optical/Infrared Camera: An electro-optical/infrared (EO/IR) system is a type of electronic equipment that combines electro-optical and infrared sensors to offer accurate optical information of air traffic in the airspace within its coverage range at any time. EO/IR systems can be used to carry out object tracking, assess threats from a certain distance, or monitor other aircraft or ground obstructions that must be avoided.
3.1.2. Detection Probability of Sensors and Terrain Types
3.1.3. SAND Model Formulation
Mesh Generation and Coordinate Transformation
Mesh Parameters and Block Set
Terrains and Sensor Detection Probabilities
Exclusion of Outer Blocks
Selection of Candidate Sensor Locations
Sensor Block Allocation
| Algorithm 1 Computing the set of blocks covered by each sensor at each candidate location |
for each sensor of type s in S do for each location e in C do initialize an empty set ; for each block z in Z do all points in z are in = True; for each point o in block z in Z do if o is not in the set then all points in z are in = False; break; if all points in z are in then add z to the set . |
Probability of Detection and Misdetection of Sensors
Minimum Required Detection Probability Constraint
Objective Function and Decision Variables
Full Coverage Constraint
Homogeneous and Heterogeneous Sensor Networks
Assumptions
3.1.4. Solution Algorithm
3.2. Low Altitude Surveillance Information Clearinghouse Features and Functionalities
3.2.1. Surveillance Data Types and Sizes
3.2.2. Cloud Components
3.3. Cost–Benefit Analysis of Low Altitude Surveillance Information Clearinghouse
3.3.1. Cost Factor 1: Surveillance Sensor Cost
3.3.2. Cost Factor 2: Cloud Computing Cost
3.3.3. Benefit Factor
3.3.4. Net Present Value
4. Results
4.1. Experimental Setup
4.1.1. Sensors
4.1.2. Surveillance Area
4.2. Revenue and Cloud-Computing Cost Analysis
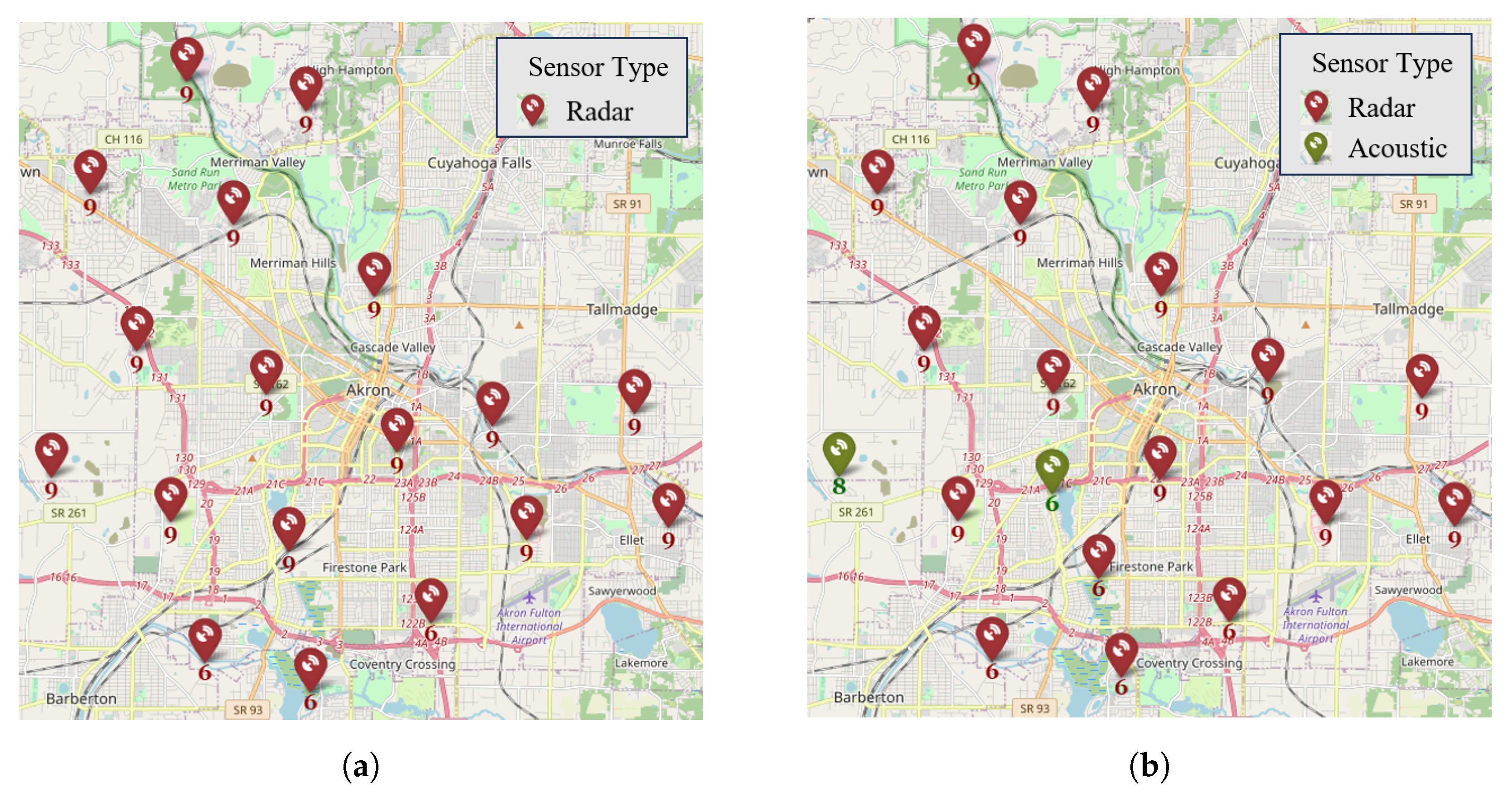
4.3. Homogeneous Sensor Placement Analysis
4.4. Heterogeneous Sensor Placement Analysis
4.5. Sensitivity Analysis
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rothfeld, R.; Fu, M.; Balać, M.; Antoniou, C. Potential urban air mobility travel time savings: An exploratory analysis of munich, paris, and san francisco. Sustainability 2021, 13, 2217. [Google Scholar] [CrossRef]
- Dulia, E.F.; Sabuj, M.S.; Shihab, S.A. Benefits of Advanced Air Mobility for Society and Environment: A Case Study of Ohio. Appl. Sci. 2021, 12, 207. [Google Scholar] [CrossRef]
- Silva, C.; Johnson, W.; Solis, E.; Patterson, M.; Antcliff, K. VTOL urban air mobility concept vehicles for technology development. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3847. [Google Scholar] [CrossRef]
- Thipphavong, D.; Apaza, R.; Barmore, B.; Battiste, V.; Burian, B.; Dao, Q.; Feary, M.; Go, S.; Goodrich, K.; Homola, J.; et al. Urban air mobility airspace integration concepts and considerations. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3676. [Google Scholar] [CrossRef]
- Federal Aviation Administration (FAA). Concept of Operations v2.0, Unmanned Aircraft System (UAS) Traffic Management (UTM). Available online: https://www.faa.gov/sites/faa.gov/files/2022-08/UTM_ConOps_v2.pdf (accessed on 16 August 2022).
- Pradeep, P.; Wei, P. Energy-efficient arrival with rta constraint for multirotor evtol in urban air mobility. J. Aerosp. Inf. Syst. 2019, 16, 263–277. [Google Scholar] [CrossRef]
- Yang, X.; Wei, P. Autonomous on-Demand Free Flight Operations in Urban Air Mobility Using Monte Carlo Tree Search. In Proceedings of the International Conference on Research in Air Transportation (ICRAT), Barcelona, Spain, 26–29 June 2018. [Google Scholar]
- Hasan, S. Urban Air Mobility Market Study; Technical Report; Crown Consulting, Inc.: Washington, DC, USA, 2018. [Google Scholar]
- Reiche, C.; Goyal, R.; Cohen, A.; Serrao, J.; Kimmel, S.; Fernando, C.; Shaheen, S. Urban Air Mobility Market Study; Technical Report; Booz Allen Hamilton: Tysons Corner, VA, USA, 2018. [Google Scholar]
- German, B.; Daskilewicz, M.; Hamilton, T.; Warren, M. Cargo delivery in by passenger eVTOL aircraft: A case study in the San Francisco bay area. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 7–10 January 2018; p. 2006. [Google Scholar] [CrossRef]
- Lim, E.; Hwang, H. The selection of vertiport location for on-demand mobility and its application to Seoul metro area. Int. J. Aeronaut. Space Sci. 2019, 20, 260–272. [Google Scholar] [CrossRef]
- Chen, L.; Wandelt, S.; Dai, W.; Sun, X. Scalable Vertiport Hub Location Selection for Air Taxi Operations in a Metropolitan Region. INFORMS J. Comput. 2022, 34, 834–856. [Google Scholar] [CrossRef]
- Shihab, S.A.M.; Wei, P.; Ramirez, D.S.J.; Mesa-Arango, R.; Bloebaum, C. By schedule or on demand?—A hybrid operation concept for urban air mobility. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019; p. 3522. [Google Scholar] [CrossRef]
- Shihab, S.A.M.; Wei, P.; Shi, J.; Yu, N. Optimal evtol fleet dispatch for urban air mobility and power grid services. In Proceedings of the AIAA Aviation 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 2906. [Google Scholar] [CrossRef]
- Garrow, L.A.; German, B.J.; Leonard, C.E. Urban air mobility: A comprehensive review and comparative analysis with autonomous and electric ground transportation for informing future research. Transp. Res. Part Emerg. Technol. 2021, 132, 103377. [Google Scholar] [CrossRef]
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.D.; Kaiser, J.; Plötner, K.O. An overview of current research and developments in urban air mobility–Setting the scene for UAM introduction. J. Air Transp. Manag. 2020, 87, 101852. [Google Scholar] [CrossRef]
- Federal Aviation Administration. FAA to Test and Evaluate Unmanned Aircraft Detection & Mitigation Equipment at Airports. 2020. Available online: https://www.faa.gov/newsroom/faa-test-and-evaluate-unmanned-aircraft-detection-mitigation-equipment-airports (accessed on 1 January 2023).
- uAvionix. pingStation 3: Networkable Weatherproof 978/1090 ADS-B Receiver. Available online: https://uavionix.com/products/pingstation-3/#specs (accessed on 30 January 2023).
- Dedrone. DedroneSensor RF-360. Available online: https://www.dedrone.com/products/hardware/rf-sensors/rf-360 (accessed on 2 February 2023).
- BlueMark Innovations BV. DroneScout Remote ID Receiver. Available online: https://dronescout.co/dronescout-remote-id-receiver/ (accessed on 30 January 2023).
- Echodyne Corp. EchoGuard Airspace Management Radar. Available online: https://echodyne.com/documents/ (accessed on 7 January 2023).
- OptiNav. Drone Hound-OptiNav Drone Detection and Tracking System. 2021. Available online: https://www.optinav.com/drone-hound (accessed on 7 November 2023).
- Goyal, R.; Reiche, C.; Fernando, C.; Cohen, A. Advanced air mobility: Demand analysis and market potential of the airport shuttle and air taxi markets. Sustainability 2021, 13, 7421. [Google Scholar] [CrossRef]
- Lamping, A.P.; Ouwerkerk, J.N.; Barnes, E.; DeGroote, N.; Wessels, A.; Brown, B.; Cohen, K. Enhancing SkyVision: Integrating UAS Flight Information with ATC Data. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1595–1604. [Google Scholar] [CrossRef]
- Mu, S.; Xiong, Z.; Tian, Y. Intelligent traffic control system based on cloud computing and big data mining. IEEE Trans. Ind. Inform. 2019, 15, 6583–6592. [Google Scholar] [CrossRef]
- Nayar, K.B.; Kumar, V. Cost benefit analysis of cloud computing in education. Int. J. Bus. Inf. Syst. 2018, 27, 205–221. [Google Scholar]
- Couture, L.; Saxe, S.; Miller, E. Cost-Benefit Analysis of Transportation Investment: A Literature Review. In iCity: Urban Informatics for Sustainable Metropolitan Growth; Ministry of Research and Innovation of Ontario: Toronto, ON, USA, 2016. [Google Scholar]
- Robinson, R. Cost-benefit analysis. Br. Med. J. 1993, 307, 924–926. [Google Scholar] [CrossRef]
- Uckelmann, D. Performance measurement and cost benefit analysis for RFID and Internet of Things implementations in logistics. In Quantifying the Value of RFID and the EPC Global Architecture Framework in Logistics; Springer: Berlin/Heidelberg, Germany, 2012; pp. 71–100. [Google Scholar]
- Kawamura, E.; Kannan, K.; Lombaerts, T.; Stepanyan, V.; Dolph, C.; Ippolito, C. Ground-Based Vision Tracker for Advanced Air Mobility and Urban Air Mobility. In Proceedings of the AIAA SCITECH 2024 Forum, Orlando, FL, USA, 8–12 January 2024. [Google Scholar] [CrossRef]
- Kannan, K.; Baculi, J.E.; Lombaerts, T.; Kawamura, E.; Gorospe, G.E.; Holforty, W.; Ippolito, C.A.; Stepanyan, V.; Dolph, C.; Brown, N. A Simulation Architecture for Air Traffic Over Urban Environments Supporting Autonomy Research in Advanced Air Mobility. In Proceedings of the AIAA SciTech 2023 Forum, National Harbor, MD, USA, 23–27 January 2023; p. 0895. [Google Scholar] [CrossRef]
- Belwafi, K.; Alkadi, R.; Alameri, S.A.; Al Hamadi, H.; Shoufan, A. Unmanned aerial vehicles’ remote identification: A tutorial and survey. IEEE Access 2022, 10, 87577–87601. [Google Scholar] [CrossRef]
- Lofù, D.; Tedeschi, P.; Di Noia, T.; Di Sciascio, E. URANUS: Radio Frequency Tracking, Classification and Identification of Unmanned Aircraft Vehicles. arXiv 2022, arXiv:2207.06025. [Google Scholar] [CrossRef]
- Scheff, S. State of the Industry: UAS Sensor Review; Technical Report, NASA Technical Reports Server; NASA: Washington, DC, USA, 2021.
- North, D.C. Location theory and regional economic growth. J. Political Econ. 1955, 63, 243–258. [Google Scholar] [CrossRef]
- Govindan, K.; Garg, K.; Gupta, S.; Jha, P. Effect of product recovery and sustainability enhancing indicators on the location selection of manufacturing facility. Ecol. Indic. 2016, 67, 517–532. [Google Scholar] [CrossRef]
- Alosta, A.; Elmansuri, O.; Badi, I. Resolving a location selection problem by means of an integrated AHP-RAFSI approach. Rep. Mech. Eng. 2021, 2, 135–142. [Google Scholar] [CrossRef]
- Pınar, M.; Antmen, Z.F. A healthcare facility location selection problem with fuzzy TOPSIS method for a regional hospital. Avrupa Bilim Teknol. Derg. 2019, 16, 750–757. [Google Scholar] [CrossRef]
- Li, M.; Wandelt, S.; Cai, K.; Sun, X. Machine learning augmented approaches for hub location problems. Comput. Oper. Res. 2023, 154, 106188. [Google Scholar] [CrossRef]
- Semaan, R. Optimal sensor placement using machine learning. Comput. Fluids 2017, 159, 167–176. [Google Scholar] [CrossRef]
- Uyeh, D.D.; Akinsoji, A.; Asem-Hiablie, S.; Bassey, B.I.; Osinuga, A.; Mallipeddi, R.; Amaizu, M.; Ha, Y.; Park, T. An online machine learning-based sensors clustering system for efficient and cost-effective environmental monitoring in controlled environment agriculture. Comput. Electron. Agric. 2022, 199, 107139. [Google Scholar] [CrossRef]
- Dhillon, S.S.; Chakrabarty, K.; Iyengar, S.S. Sensor placement for grid coverage under imprecise detections. In Proceedings of the Fifth International Conference on Information Fusion. FUSION 2002 (IEEE Cat. No. 02EX5997), Annapolis, MD, USA, 8–11 July 2002; Volume 2, pp. 1581–1587. [Google Scholar] [CrossRef]
- Hajipour, V.; Fattahi, P.; Bagheri, H.; Babaei Morad, S. Dynamic maximal covering location problem for fire stations under uncertainty: Soft-computing approaches. Int. J. Syst. Assur. Eng. Manag. 2022, 13, 90–112. [Google Scholar] [CrossRef]
- Indu, S.; Chaudhury, S.; Mittal, N.R.; Bhattacharyya, A. Optimal sensor placement for surveillance of large spaces. In Proceedings of the 2009 Third ACM/IEEE International Conference on Distributed Smart Cameras (ICDSC), Como, Italy, 30 August–2 September 2009; pp. 1–8. [Google Scholar] [CrossRef]
- Darabseh, A.; Bitsikas, E.; Tedongmo, B.; Pöpper, C. On ads-b sensor placement for secure wide-area multilateration. Proceedings 2020, 59, 3. [Google Scholar] [CrossRef]
- Inoue, T.; Ikami, T.; Egami, Y.; Nagai, H.; Naganuma, Y.; Kimura, K.; Matsuda, Y. Data-driven optimal sensor placement for high-dimensional system using annealing machine. Mech. Syst. Signal Process. 2023, 188, 109957. [Google Scholar] [CrossRef]
- Chen, M.; Zhao, T.; Lee, J.; Lee, H. Developing a Decision-Making Process of Location Selection for Truck Public Parking Lots in Korea. Sustainability 2023, 15, 1467. [Google Scholar] [CrossRef]
- Yu, Q.; Yang, C.; Dai, G.; Peng, L.; Chen, X. Synchronous wireless sensor and sink placement method using dual-population coevolutionary constrained multi-objective optimization algorithm. IEEE Trans. Ind. Inform. 2022, 19, 7561–7571. [Google Scholar] [CrossRef]
- Ostachowicz, W.; Soman, R.; Malinowski, P. Optimization of sensor placement for structural health monitoring: A review. Struct. Health Monit. 2019, 18, 963–988. [Google Scholar] [CrossRef]
- Vecherin, S.N.; Wilson, D.K.; Pettit, C.L. Optimal Sensor Placement with Terrain-Based Constraints and Signal Propagation Effects; Cold Regions Research and Engineering Laboratory (US): Hanover, NH, USA, 2008; Volume 7333. [Google Scholar] [CrossRef]
- Tema, E.Y.; Sahmoud, S.; Kiraz, B. Radar placement optimization based on adaptive multi-objective meta-heuristics. Wirel. Commun. Mob. Comput. 2024, 239, 122568. [Google Scholar] [CrossRef]
- ZainEldin, H.; Badawy, M.; Elhosseini, M.; Arafat, H.; Abraham, A. An improved dynamic deployment technique based-on genetic algorithm (IDDT-GA) for maximizing coverage in wireless sensor networks. J. Ambient. Intell. Humaniz. Comput. 2020, 239, 4177–4194. [Google Scholar] [CrossRef]
- Lin, F.Y.; Chiu, P. A near-optimal sensor placement algorithm to achieve complete coverage-discrimination in sensor networks. IEEE Commun. Lett. 2005, 9, 43–45. [Google Scholar] [CrossRef]
- Tossa, F.; Abdou, W.; Ansari, K.; Ezin, E.C.; Gouton, P. Area coverage maximization under connectivity constraint in wireless sensor networks. Sensors 2022, 22, 1712. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Tian, L.; Wu, W.; Lin, L.; Li, Z.; Tong, Y. A Metaheuristic Algorithm for Coverage Enhancement of Wireless Sensor Networks. Wirel. Commun. Mob. Comput. 2022, 239, 122568. [Google Scholar] [CrossRef]
- pyproj 3.4.1. Pyproj Documentation. Available online: https://pypi.org/project/pyproj/ (accessed on 5 April 2023).
- CAT129-EUROCONTROL; Specification for Surveillance Data Exchange ASTERIX Part 29 Category 129. Technical Report; EUROCONTROL: Brussels, Belgium, 2019.
- CAT021-EUROCONTROL; Specification for Surveillance Data Exchange ASTERIX Part 12 Category 21. Technical Report; EUROCONTROL: Brussels, Belgium, 2022.
- CAT062-EUROCONTROL; Specification for Surveillance Data Exchange ASTERIX Part 9 Category 062. Technical Report; EUROCONTROL: Brussels, Belgium, 2023.
- Del Rosario, R.; Davis, T.; Dyment, M.; Cohen, K. Infrastructure to Support Advanced Autonomous Aircraft Technologies in Ohio; Technical Report; Department of Transportation, Office of Statewide Planning and Research: Columbus, OH, USA, 2021.
- Microsoft. Real-Time Analytics on Big Data Architecture. Available online: https://learn.microsoft.com/en-us/azure/architecture/solution-ideas/articles/real-time-analytics (accessed on 2 March 2023).
- Microsoft. Azure Event Hubs—A Big Data Streaming Platform and Event Ingestion Service. Available online: https://learn.microsoft.com/en-us/azure/event-hubs/event-hubs-about (accessed on 3 March 2023).
- Microsoft. Azure Synapse Analytics. Available online: https://azure.microsoft.com/en-us/products/synapse-analytics/ (accessed on 3 March 2023).
- Microsoft. Azure Data Lake Storage. Available online: https://azure.microsoft.com/en-us/products/storage/data-lake-storage/ (accessed on 3 March 2023).
- Microsoft. AzAzure Cosmos DB. Available online: https://azure.microsoft.com/en-us/products/cosmos-db/ (accessed on 5 March 2023).
- Microsoft. Azure Analysis Services. Available online: https://azure.microsoft.com/en-us/products/analysis-services/ (accessed on 6 March 2023).
- Microsoft. Power BI. Available online: https://powerbi.microsoft.com/en-us/ (accessed on 5 March 2023).
- Microsoft. Azure Pricing. Available online: https://azure.microsoft.com/en-us/pricing/?v=17.23h#product-pricing (accessed on 2 March 2023).
- Fortune Business Insights. Drone Package Delivery Market; Technical Report; Fortune Business Insights: Pune, India, 2023. [Google Scholar]
- Trautvetter, C. U.S. AAM Market to Generate $115B Annually by 2035; Technical Report; Aviation International News: Midland Park, NJ, USA, 2021. [Google Scholar]
- Allied Market Research. Advanced Aerial Mobility Market; Technical Report; Allied Market Research: Portland, OR, USA, 2021. [Google Scholar]
- Gallo, A. A refresher on net present value. Harv. Bus. Rev. 2014, 19, 1–6. [Google Scholar]
- Dobrowolski, Z.; Drozdowski, G. Does the Net Present Value as a Financial Metric Fit Investment in Green Energy Security? Energies 2022, 15, 353. [Google Scholar] [CrossRef]
- Altonji, J.G.; Humphries, J.E.; Zhong, L. The Effects of Advanced Degrees on the Wage Rates, Hours, Earnings, and Job Satisfaction of Women and Men. In 50th Celebratory Volume; Emerald Publishing Limited: Bingley, UK, 2023; Volume 50, pp. 25–81. [Google Scholar] [CrossRef]
- Terrill, M.; Batrouney, H. Unfreezing Discount Rates; Grattan Institute Melbourne: Carlton, Australia, 2018. [Google Scholar]
- Jawad, D.; Ozbay, K. The discount rate in life cycle cost analysis of transportation projects. In Proceedings of the 85th Annual Meeting of the Transportation Research Board, National Academy of Science, Washington, DC, USA, 22–26 January 2006. [Google Scholar]
- Nokkala, M. Role of discount rates and pilot projects in ITS–project CBA. Res. Transp. Econ. 2004, 8, 113–125. [Google Scholar] [CrossRef]
- Axis Communications AB. AXIS Q6225-LE PTZ Camera. 2023. Available online: https://www.axis.com/products/axis-q6225-le (accessed on 4 March 2023).
- Lamm, L.M. Develop Measures of Effectiveness and Deployment Optimization Rules for Networked Ground Micro-Sensors; Technical Report; University of Virginia: Charlottesville, VA, USA, 2001. [Google Scholar]
- Seo, J.H.; Kim, Y.H.; Ryou, H.B.; Cha, S.H.; Jo, M. Optimal sensor deployment for wireless surveillance sensor networks by a hybrid steady-state genetic algorithm. IEICE Trans. Commun. 2008, 91, 3534–3543. [Google Scholar] [CrossRef]
- Seo, J.H.; Yoon, Y.; Kim, Y.H. An efficient large-scale sensor deployment using a parallel genetic algorithm based on CUDA. Int. J. Distrib. Sens. Netw. 2016, 12, 8612128. [Google Scholar] [CrossRef]
- Report Linker. The Global Market for eVTOL Aircraft Is Estimated to Be USD 8.5 Billion in 2021 and Is Projected to Reach USD 30.8 Billion by 2030, at a CAGR of 15.3%; Technical Report; Report Linker: Lyon, France, 2021. [Google Scholar]











| Parameters | Definition |
| M | A rectangular mesh. |
| F | Transformation function of geographic coordinate system (GCS) coordinates to projected coordinate system (PCS) coordinates. |
| Longitude of the p-th point in GCS. | |
| Latitude of the p-th point in GCS. | |
| Number of points along the x-axis of M. | |
| Number of points along the y-axis of M. | |
| Length of the area along the horizontal axis. | |
| Length of the area along the vertical axis. | |
| L | Block side length. |
| Range of a sensor. | |
| Set of all points in M. | |
| Set of all blocks in M. | |
| T | Set of terrain types associated with each block in . |
| S | Set of potential sensor types. |
| Detection probabilities for all combinations of terrain types in T and sensor types in S. | |
| Probability of detecting an AAM aircraft with a sensor of type s on block z. | |
| Terrain type of the z-th block in T. | |
| Indicator function that equals 1 if block z belongs to the area, and 0 otherwise. | |
| Q | Number of blocks removed from . |
| C | Set of center points of blocks in Z. |
| Sensor range for a sensor of type s in S. | |
| Euclidean distance between a sensor location e in C and a point i in . | |
| Set of coordinates of the points covered by a sensor of type s at location e. | |
| Set of blocks covered by a sensor of type s at location e. | |
| Mean of all the probability of sensor detection values for blocks in for a sensor of type s. | |
| Probability of misdetection of a sensor of type s at location e. | |
| r | Minimum required detection probability. |
| Number of independent sensors of type s required to achieve a minimum required detection probability at location e. | |
| Probability of misdetection of sensor l among sensors of type s at location e. | |
| Cost of a sensor of type s. | |
| Number of sensors needed for sensor type s to provide coverage at a location. | |
| Indices | |
| p | p-th point in GCS. |
| j | j-th row of blocks in M. |
| k | k-th column of blocks in M. |
| z | z-th block in and Z. |
| e | e-th candidate sensor location in C. |
| i | i-th point in . |
| s | s-th sensor type in S. |
| l | l-th sensor among sensors. |
| Decision Variables | |
| Binary variable representing whether a sensor of type s is placed at location e. | |
| Binary variable representing whether block z is covered by at least one sensor. |
| Aircraft Type | Interface Standard | Number of Data Items | Message Size (Bits) |
|---|---|---|---|
| Cooperative manned aircraft | ASTERIX CAT-021 | 42 | 1136 |
| Cooperative uncrewed aircraft | ASTERIX CAT-129 | 14 | 432 |
| Non-cooperative aircraft | ASTERIX CAT-062 | 27 | 2648 |
| Sensor Types | Vendor | System | Range (km) | (≈USD) | |
|---|---|---|---|---|---|
| Radar | Echodyne, Kirkland, WA, USA | Echo Guard | 2.41 | 35,000 | 3 |
| ADS–B | AVIONIX Software S.L., Bigfork, MT, USA | CamelCase pingStation3 | 321.87 | 2250 | 1 |
| Remote ID | BlueMark Innovations BV, Enschede, The Netherlands | Drone Scout | 5.02 | 1100 | 1 |
| RF | Dedrone, San Francisco, CA | RF-360 | 4.99 | 35,000 | 1 |
| Acoustic | OptiNav, Bellevue, WA, USA | Drone Hound | 0.5 | 9000 | 1 |
| Optical Camera | Axis Communications, Lund, Sweden | Q6225-LE PTZ Network Camera | 0.4 | 3500 | 6 |
| Sensor Type (S) | Terrain Type (T) | ||||
|---|---|---|---|---|---|
| Open | Water | Neighborhood | Hill | Commercial Area | |
| Radar | 0.95 | 0.90 | 0.85 | 0.75 | 0.75 |
| ADS–B | 0.99 | 0.99 | 0.90 | 0.85 | 0.80 |
| Remote ID | 0.95 | 0.95 | 0.85 | 0.80 | 0.75 |
| Radio Frequency | 0.95 | 0.95 | 0.85 | 0.80 | 0.75 |
| Acoustic | 0.75 | 0.65 | 0.40 | 0.25 | 0.20 |
| Optical Camera | 0.90 | 0.90 | 0.80 | 0.75 | 0.70 |
| City | Radar | ADS–B | RF | Remote ID | Acoustic | Optical Camera |
|---|---|---|---|---|---|---|
| Columbus | 610 | 1 | 49 | 49 | 29,500 | 55,000 |
| Cleveland | 261 | 1 | 24 | 24 | 10,684 | 21,642 |
| Cincinnati | 228 | 1 | 20 | 20 | 20,000 | 34,335 |
| Toledo | 192 | 1 | 17 | 17 | 15,305 | 33,594 |
| Akron | 153 | 1 | 14 | 14 | 13,920 | 27,228 |
| Dayton | 110 | 1 | 11 | 11 | 10,095 | 22,890 |
| Total Number of Sensors Needed | ||||
|---|---|---|---|---|
| Homogeneous Sensor Network | Heterogeneous Sensor Network | |||
| City | Radar | Acoustic | Optical Camera | Radar, Acoustic, and Optical Camera |
| Columbus | 610 | 29,500 | 55,000 | 648 |
| Cleveland | 261 | 10,684 | 21,642 | 333 |
| Cincinnati | 228 | 20,000 | 34,335 | 240 |
| Toledo | 192 | 15,305 | 33,594 | 192 |
| Akron | 153 | 13,920 | 27,228 | 155 |
| Dayton | 110 | 10,095 | 22,890 | 112 |
| Total Sensor Cost (Million USD) | ||||
|---|---|---|---|---|
| Homogeneous Sensor Network | Heterogeneous Sensor Network | |||
| City | Radar | Acoustic | Optical Camera | Radar, Acoustic, and Optical Camera |
| Columbus | 21.35 | 265.50 | 192.50 | 20.75 |
| Cleveland | 9.14 | 96.16 | 75.75 | 8.51 |
| Cincinnati | 7.98 | 180.00 | 120.17 | 7.83 |
| Toledo | 6.72 | 137.75 | 117.58 | 6.72 |
| Akron | 5.36 | 125.28 | 95.30 | 5.06 |
| Dayton | 3.85 | 90.86 | 80.12 | 3.52 |
| Runtime (Second) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Homogeneous Sensor Network | Heterogeneous Sensor Network | |||||||
| City | Number of Blocks | Radar | ADS–B | Remote ID | RF | Acoustic | Optical Camera | Radar, Acoustic, and Optical Camera |
| Columbus | 130 × 126 | 68.97 | 198.99 | 48.23 | 51.95 | 45.25 | 38.80 | 230.34 |
| Cleveland | 77 × 96 | 14.78 | 29.25 | 8.70 | 10.56 | 5.43 | 6.30 | 56.67 |
| Cincinnati | 58 × 77 | 3.67 | 6.67 | 1.31 | 1.80 | 1.05 | 1.02 | 8.75 |
| Toledo | 57 × 72 | 2.01 | 5.23 | 1.25 | 1.66 | 0.87 | 0.90 | 7.78 |
| Akron | 65 × 62 | 1.45 | 3.11 | 0.87 | 0.89 | 0.03 | 0.03 | 2.03 |
| Dayton | 54 × 60 | 0.96 | 2.35 | 0.14 | 0.15 | 0.01 | 0.01 | 1.56 |
| Case | Terrain Type (T) | Number of Sensors | Total Sensor Cost (USD Million) | ||||
|---|---|---|---|---|---|---|---|
| Open | Water | Neighborhood | Hill | Commercial Area | |||
| Preset Value | 0.9500 | 0.9000 | 0.8500 | 0.7500 | 0.7500 | 153 | 5.355 |
| 5% Increase | 0.9975 | 0.945 | 0.8925 | 0.7875 | 0.7875 | 114 | 3.990 |
| 5% Decrease | 0.9025 | 0.855 | 0.8075 | 0.7125 | 0.7125 | 165 | 5.775 |
| Sensor Type | r | Number of Sensors | Total Sensor Cost (Million USD) |
|---|---|---|---|
| ADS–B | 0.96 | 1 | 0.002 |
| 0.97 | 1 | 0.002 | |
| 0.98 | 1 | 0.002 | |
| 0.99 | 2 | 0.005 | |
| Remote ID | 0.96 | 10 | 0.011 |
| 0.97 | 11 | 0.012 | |
| 0.98 | 14 | 0.015 | |
| 0.99 | 15 | 0.017 | |
| Radar | 0.96 | 117 | 4.095 |
| 0.97 | 120 | 4.200 | |
| 0.98 | 153 | 5.355 | |
| 0.99 | 165 | 5.775 | |
| RF | 0.96 | 10 | 0.350 |
| 0.97 | 11 | 0.385 | |
| 0.98 | 14 | 0.490 | |
| 0.99 | 15 | 0.525 | |
| Acoustic | 0.96 | 12,068 | 108.612 |
| 0.97 | 12,421 | 111.789 | |
| 0.98 | 13,920 | 125.280 | |
| 0.99 | 17,150 | 154.350 | |
| Optical Camera | 0.96 | 19,986 | 69.951 |
| 0.97 | 26,742 | 93.597 | |
| 0.98 | 27,228 | 95.298 | |
| 0.99 | 28,680 | 100.380 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dulia, E.F.; Shihab, S.A.M. Designing a Surveillance Sensor Network with Information Clearinghouse for Advanced Air Mobility. Sensors 2024, 24, 803. https://doi.org/10.3390/s24030803
Dulia EF, Shihab SAM. Designing a Surveillance Sensor Network with Information Clearinghouse for Advanced Air Mobility. Sensors. 2024; 24(3):803. https://doi.org/10.3390/s24030803
Chicago/Turabian StyleDulia, Esrat Farhana, and Syed A. M. Shihab. 2024. "Designing a Surveillance Sensor Network with Information Clearinghouse for Advanced Air Mobility" Sensors 24, no. 3: 803. https://doi.org/10.3390/s24030803
APA StyleDulia, E. F., & Shihab, S. A. M. (2024). Designing a Surveillance Sensor Network with Information Clearinghouse for Advanced Air Mobility. Sensors, 24(3), 803. https://doi.org/10.3390/s24030803