This research presents a precise algorithm for indoor localization applications, focusing on the challenges of extending the lifetime of wireless sensor networks and evaluating the accuracy of the presented algorithm. The main challenge is to deal with real-world parameters to simulate large-scale indoor localization scenarios. To address these complexities and improve the efficiency of the Wireless Sensor Network (WSN) design, an innovative approach is taken: simulating the network through OMNeT++. The main goal is to create a simulated environment that accurately reflects the behavior of the WSN under various conditions. Taking advantage of OMNeT++, a simulation is developed using the wake-up MAC protocol with a detailed application. A special C++ code is developed that allows exploration, evaluation, and optimization of the performance of the WSN before proceeding to real-world implementation.
Furthermore, it enables us to fine-tune critical parameters, such as transmission power, and node placements, to achieve optimal system performance and energy efficiency. This work also involves verification of scalability tests, allowing us to understand how WSN will perform as the network’s size or coverage area expands. Additionally, collects invaluable performance metrics such as accuracy and energy consumption, during simulations, thus facilitating informed decision-making and realistic expectations for the real-world deployment.
Similarly, different parameters are analyzed, including worst-case and edge-case scenarios, to assess how WSN responds to various conditions, such as interference and mobility patterns. Additionally, OMNeT++ enables us to develop and validate localization algorithms, and data aggregation strategies, ensuring their correctness and efficiency within the controlled simulation environment. In summary, the approach of employing OMNeT++ for simulating WSN underlines the commitment to thorough and systematic research and development.
5.1. OMNeT++
OMNeT++ discrete event simulator is a widely used framework for modeling and simulating complex communication networks and distributed systems. The use of OMNeT++ as a simulation tool forWSNs is a valuable strategy, especially when dealing with uncertain factors and aiming to evaluate system performance before real-world deployment. By developing C++ code within OMNeT++, researchers and engineers can create a virtual environment that reflects the behavior of their planned WSN in various scenarios.
These include reducing risk by identifying potential problems without the cost of physical implementation, optimizing parameters, facilitating scalability testing, enabling comprehensive performance assessment, supporting scenario-based testing to assess system robustness, supporting algorithm and protocol development, and enabling rigorous validation of custom communication protocols.
By utilizing OMNeT++ in this manner, project teams can make informed decisions, fine-tune system parameters, and enhance the likelihood of a successful real-world WSN implementation. It is an open source based on components for education and research purposes. It is a component-based, modular, and open-architecture simulation environment with strong graphical user interface (GUI) support and an amendable simulation kernel. It is an object-oriented discrete event simulation framework. Its primary application area is the simulation of communication networks on a large scale, but it has been successfully used in other areas like the simulation of IT systems, queuing networks, hardware architectures, and business processes as well [
34].
5.3. Estimation of Exponent Path-Loss Model
To use real parameters, we have attempted to estimate the RSSI in our environment, which is the most critical parameter in our simulation, to achieve accuracy close to reality. To use real parameters, we estimate the path loss exponent
and
that describe our environment. To characterize the RSSI model in an indoor environment, an experimental setup was performed.
Figure 9 presents the experimental environment. A WuRx node operating at 868 MHz frequency is used.
The main goal was to determine the parameters of the propagation model that best describe our real environment. Two of these parameters are the path loss exponent
and
, which characterize the signal attenuation as a function of distance between nodes in a specific environment. In this context, four nodes have been used to collect RSSI data. These nodes have been strategically positioned within a corridor, maintaining a height of 1.5 m above the ground, to create a two-dimensional
plane. Our objective revolves around studying the behavior of a mobile target within this environment, with the target’s transmission power set at −15 dBm. The anchors were placed in different positions as shown in
Figure 10.
Several samples of RSSI are collected using the putty tool. According to the different movements of the target inside the corridor, different data sets present RSSI values for each anchor and the distance calculated between the target and anchor. For such position of the target, we take measurements of 1 min. For estimation, a Python code is used with fitting techniques to find the values of path loss exponent and values.
Figure 11 illustrates the coding process in which we used the SciPy library to estimate the parameters.
and
are defined as −30 dBm and 1 m.
Table 6 present above showcases the parameters of various anchor nodes, including
and
. These values provide valuable information on the characteristics of the anchor nodes within the network, helping to understand the propagation of the signal and the environmental factors that influence wireless communication.
Figure 12a–d shows the result of theoretical RSSI using the path loss exponent
mentioned in
Table 6 and the real RSSI data measurements collected from anchors 2, 3, 4 and 5.
Next, we use the data collected from all anchors to estimate the values of the parameters
and
, which indicate the prevailing environmental conditions. We find
n equal to 2.03 and
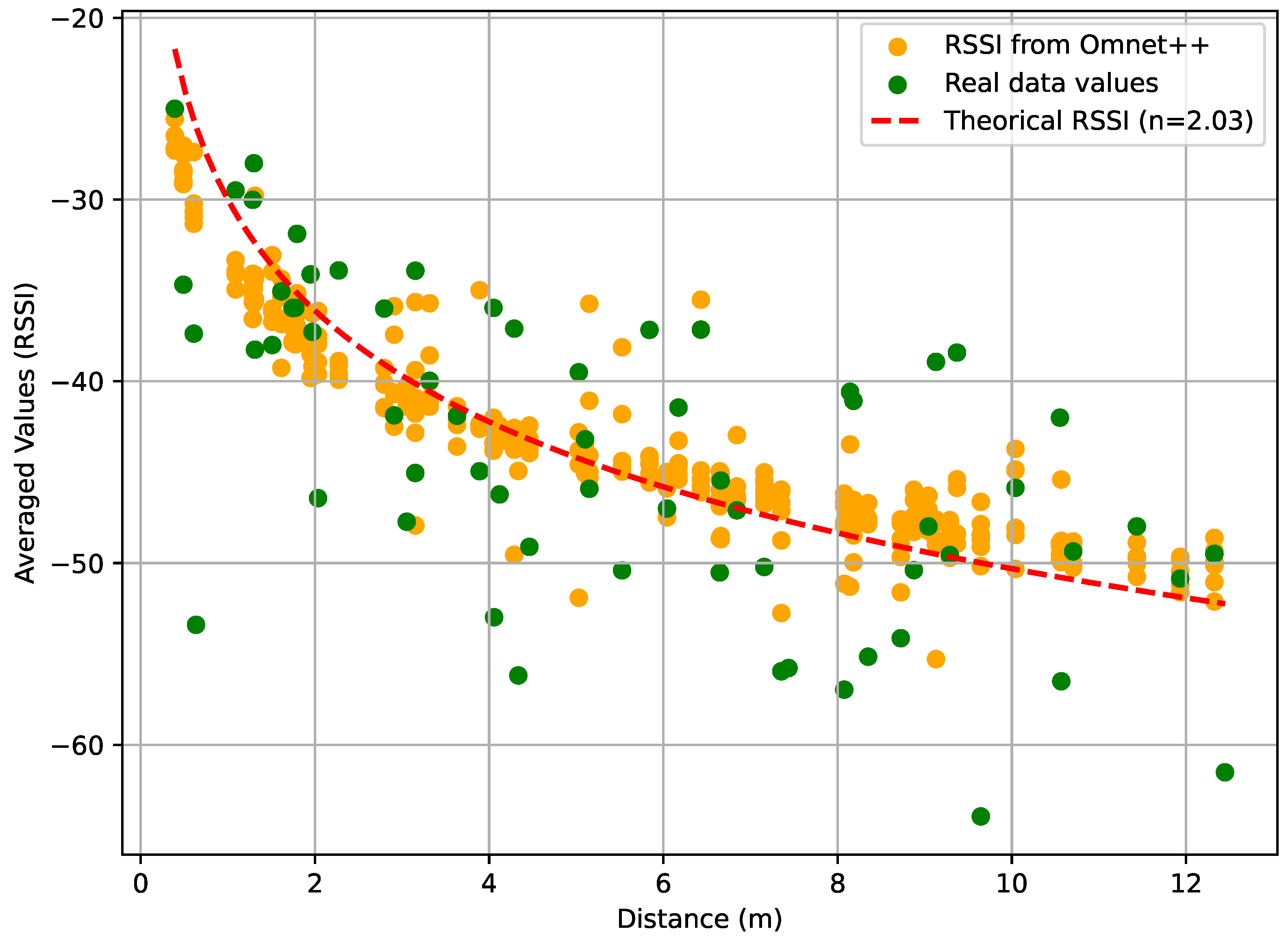
equal to 1.83 dB with a mean RSSI equal to −43.75 dBm. Meanwhile, we performed the implementation of the actual target path within the OMNeT++. This implementation was carried out in conjunction with the anchor positions and allowed us to generate RSSI data based on the corresponding distances between the target and the anchors.
Figure 13 shows the results of the estimated RSSI for the entire data set and the data generated by OMNeT++ under the same environmental conditions. The RSSI implemented used a Cauchy distribution with a mean −43.75 dBm and a standard deviation equal to 1.83 dB. Equation (
15) presents the probability density function of the Cauchy distribution [
36]:
where
and cumulative distribution function is
The output values are generated by the Cauchy distribution from the continuous distribution of the OMNeT++ simulation library. The library provides a function that returns a Cauchy random variate using the values of mean RSSI −43.75 dBm and the standard deviation 1.83 dB. To evaluate the effectiveness of our application, we used the true path and the distribution derived from OMNeT++ to estimate the different positions of the target. The resulting root mean square error (RMSE) was 1.79 m for the localization of 15 different positions. Based on these results, the proposed application demonstrates a lower error rate within a dimension cell 12.5 m × 6 m compared to state-of-the-art methods presented in [
17,
18]. These methods, which use trilateration or multilateration, have higher errors using cells of 5 m × 5 m and 9.77 m × 13.45 m, respectively. They present 3.6 m and 2.33 m as the average error for a smaller and similar cell when the proposed method presents 1.58 m. Based on the confirmed results for a single cell, we extend the studied area to 40 m × 40 m with a 20 m × 20 m cell size in the next section.
5.4. Localization Accuracy
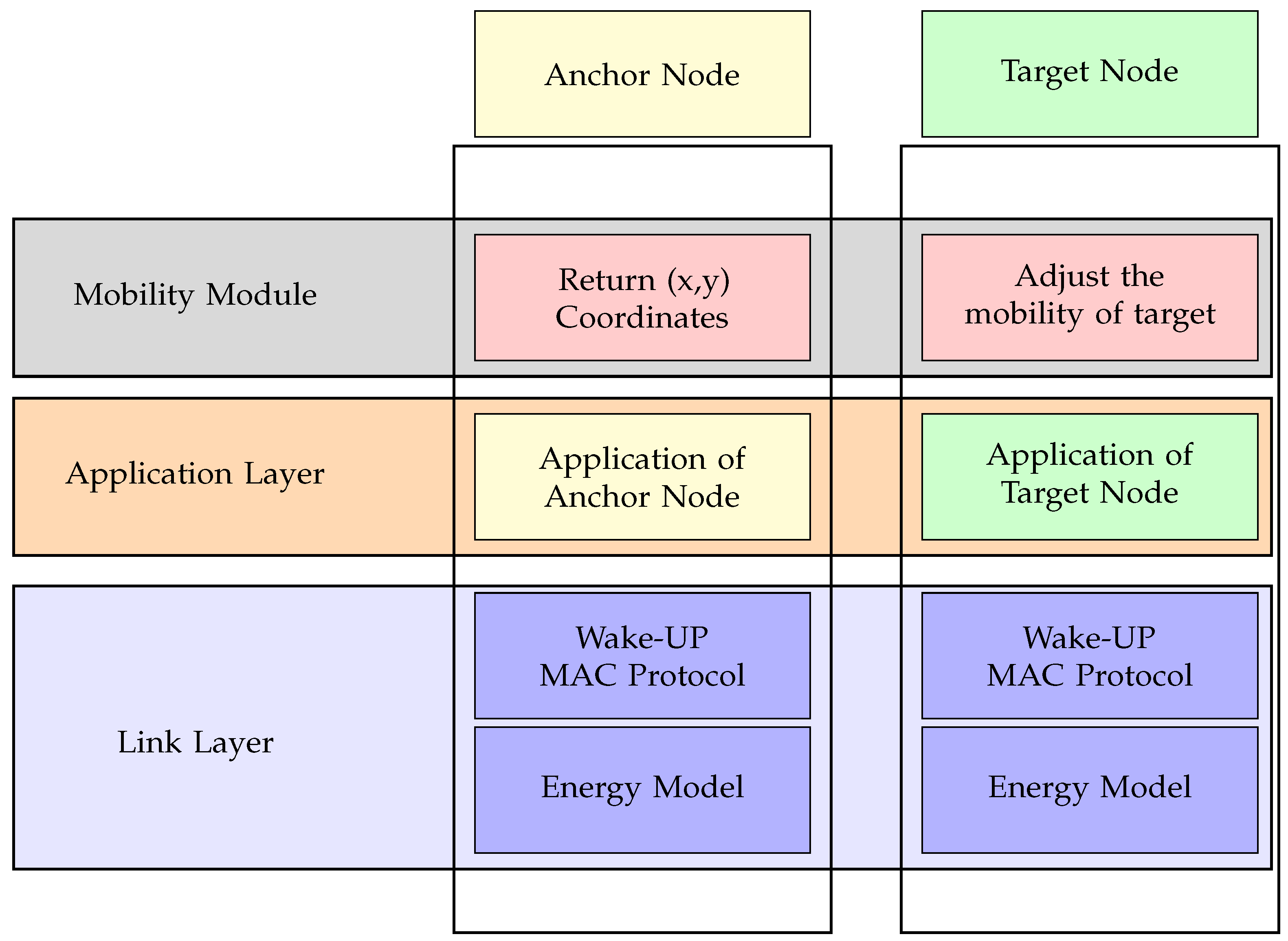
In this section, we will use the RSSI estimation function, the energy model, the wake-up MAC protocol, and the matrix architecture defined in the previous sections to facilitate the simulation of a real-world mobile target localization environment within the OMNeT++. This simulation phase precedes the eventual hardware implementation. To achieve this, we will rely on the RSSI data estimated in the previous section.
Table 7 details the simulation parameters.
The architecture of the network and the arranging of anchors are detailed in
Figure 14. The area will be divided into four cells. Cells 1 and 2 are covered by anchors 1, 2, 4, 3, 5, and 6, while cells 3 and 4 are covered by anchors 4, 5, 6, 7, 8, and 9.
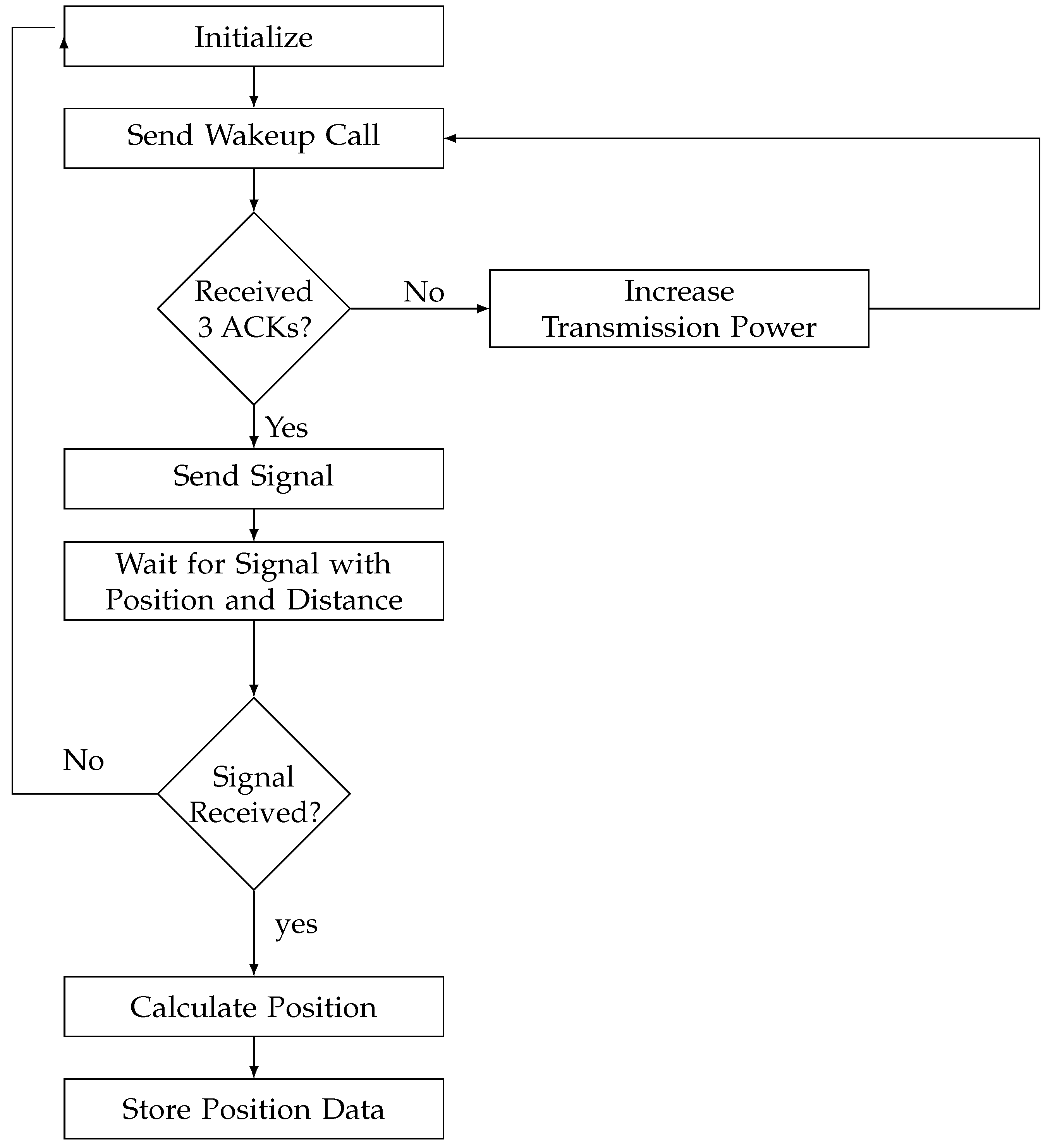
Table 7 presents the parameters of the simulation. The area is 40 m × 40 m, and each cell with 20 m × 20 m. The target and the anchors are equipped with two AA batteries with a capacity of 2790 mAh. The application will be used for the localization of 100 positions. The initial value of the transmission power of the target node starts from −15 dBm and is incremented by 5 dBm if three acknowledgments do not appear, as mentioned in the application flow chart of
Figure 7. To perform trilateration calculations, the target was equipped with an MSP430 MCU from Texas Instruments technology. These types of MCU are known for their ultralow power consumption. The mobility of the target is along an arbitrary and rather irregular path in space with a variable speed. The nominal speed of the target is 1.3 m·s
−1.
As discussed in the previous paragraph, RSSI measurements are sensitive to environmental conditions and noise. The RSSI serves as a critical parameter for our trilateration method. To evaluate the accuracy of our model, we introduce variations in the exponent path loss model to evaluate the accuracy of our model.
To analyze the results obtained, we used the parameters root mean square error (RMSE) and mean Squared Error (MSE). The RMSE has been used as a standard statistical metric to measure the performance of the model in meteorology, air quality, and climate research studies. The mean absolute error (MAE) is another useful factor widely used in model evaluations [
37].
where:
is the squared error for data point i.
is the observed (actual) value for the data point (i).
is the predicted value for data point i.
As shown in
Figure 15, the proposed application shows a high performance and reliability of the application with the two environments in different conditions of line of sight (LOS) and non line of sight (NLOS).
Figure 15a presents an RMSE equal to 2.52 m for NLOS conditions. Signal measurements include an error due to the additional path traveled. Almost 90% of errors are between 0.07 m and 3.79 m. The average error for 90% is 1.91 m. The proposed application reflects peaks at 8 m and 6 m resulting from RSSI deviation in response to real-world environmental factors; this is often referred to as non-line-of-sight (NLOS) conditions. For the LOS, the proposed application presents the best performance by an RMSE equal to 0.88 m.
Figure 15b presents the error of localization according to LOS conditions. 90% of errors are between 0.05 m and 1.41 m, for an average of 0.65 m.
Figure 16 compares the estimated target path and the actual path for both environment conditions LOS and NLOS.
Figure 16a shows the estimated path with the real path according to the error of localization. The curve of the estimated path shows the same shape with a deviation of 4 m in the middle of the area for an NLOS and 1.75 m for an LOS. According to
Figure 16a,b the proposed application can localize the target during its mobility path without position loss.
To evaluate the effectiveness of the proposed method, we performed simulations to analyze the energy consumption of both the anchors and the target within our application. The energy capacity of all nodes is quantified in joules J. The initial capacity is 32,076 J for all used anchors and the target. This capacity is obtained according to the conversion from mAh to J.
Figure 17 shows the energy consumption of the target relative to its mobility path and self-localization application. The energy is decreased according to the mobility of the target due to the communication. After locating 100 positions using our application, the capacity of the target decreased to 93.95%. Based on the consumption information provided, if the power is consumed continuously for the localization of 100 positions monthly, the battery would be depleted after the localization of 1653 positions.
For the remaining anchors, their energy consumption varies depending on their communication with the target within the localization application. The proposed application is based on dynamic anchors to reduce energy consumption during localization.
Table 8 shows the percentage of battery consumption after localization of 100 positions with the consumption in J. The total network consumption is about 2.69%. Anchors 3 and 7 remain unused.
Figure 18 shows the consumption during the localization application. At the beginning, the target moves under the cell covered by anchors 1, 2, 4, and 5. From this cell, just anchors 1, 2, and 4 are used for the localization during the first positions. When the target moves closer to anchor 5, anchor 1 switches to sleep mode, and anchors 5, 2, and 4 perform the localization. When our target moves to cell number 4 covered by anchors 5, 6, 8, and 9, anchors 2 and 4 switch to sleep mode, while anchors 5, 6, 8, and 9 are awakened according to the position of the target.
Figure 18 shows how anchors 1, 2, and 4 consume energy until they switch to sleep mode, and anchors 6, 8, and 9 are awakened by the target for the latest position.
5.5. Variation in Exponent Path-Loss Model
The simulation was kept under the same conditions, with variations limited to the value of , specifically at . It was observed that the increase in the attenuation factor leads to an increase in error, as evidenced by the data collected. Nevertheless, our application continued to show efficiency at different levels.
Setting
to
or less consistently produces the best results. Increasing
directly affects the RSSI and subsequently increases the complexity of the trilateration calculations, primarily due to interference from obstacles. However, It is important to note that changing the
value has a significant impact on the error estimates and it is due to the difference between the type of environment.
Table 9 shows the difference between RMSE for LOS and NLOS.
Table 10 presents an error classification according to framing between 1 m and 2 m. The majority of errors are up to 2 m for
equal to 3. For
equal to 2.03 presents different levels of error classification by 34.02% between 1 m and 2 m, 49.14% for errors up to 2 m and 16.84% for error less than 1 m. These illustrations effectively demonstrate how the presence of obstructions and the resulting NLOS conditions significantly affect the reliability and accuracy of RSSI-based location techniques. However, the proposed application according to the dynamic selection reduces the effect of obstacles compared to other studies.
Compared to other results for a large-scale area, the proposed method presents an effective RMSE for non-line-of-sight conditions. A comparison of our results in terms of error and tested area with the various states of the art is shown in
Figure 19. For a small-scale area, the authors of [
17] used ZigBee technology with RSSI for an area of 25 m
2 and they present an average error of 3.6 m. In [
38], the authors used the iBeacon method with a trilateration algorithm and a specific fingerprinting method. They present an error of 3.66 m for an area of 17 m
2. The proposed methods present performed results for a small area scale by 1.87 m and 1.81 m compared to results presented in [
17,
38], respectively. In [
39], the authors used an area of 1700 m
2 in a complex environment and presented an average error of 4.4 m with BLE technology, which costs more than the technology used and has lower range detection. For [
40], the authors proposed optimized propagation model parameters in order to optimize parameters for trilateration localization. Their experiments covered a space of 1052 m
2 and yielded an average error of 3.75 m. Comparatively, the proposed approach demonstrated superior performance in larger areas, showing improvements of 1.23 m and 1.88 m, respectively, for similar spatial ranges [
39,
40]. Balancing the need to localize in all positions with energy efficiency remains challenging. The proposed application presents significant results for energy consumption and accuracy for different environments.



 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}