


Design and Uncertainty Evaluation of a Calibration Setup for Turbine Blades Vibration Measurement

 ,
,  , , ,
, , ,  , , , and
, , , and
Abstract
1. Introduction
2. Fundamentals of Tip Timing
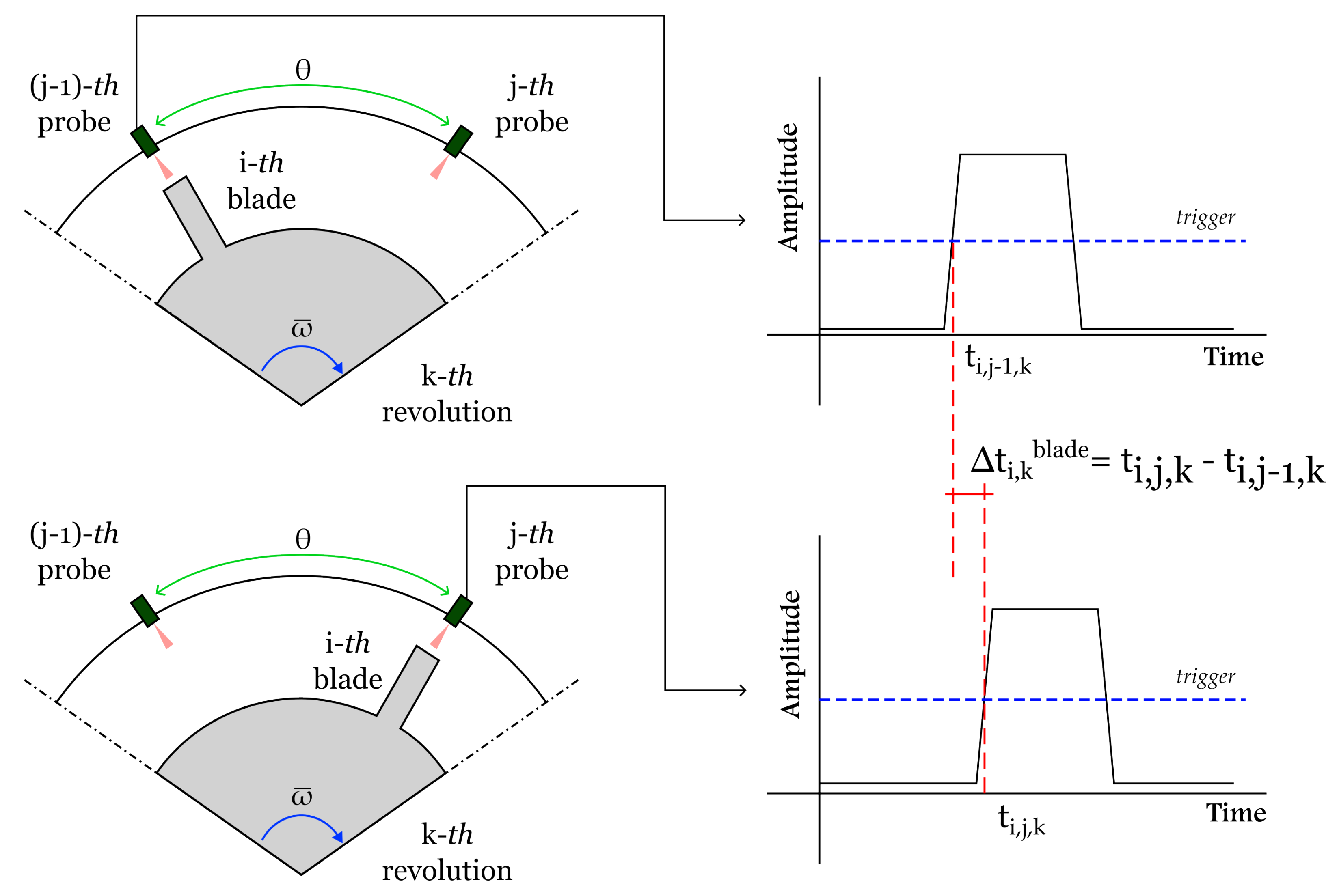
2.1. Blade Deflection from Measured Arrival Time
2.2. Methods for Measuring the Average Rotational Speed
3. Uncertainty Model for Blade Tip Deflection
4. Sources of Uncertainty in Tip Timing
4.1. Uncertainty on Tip Radius
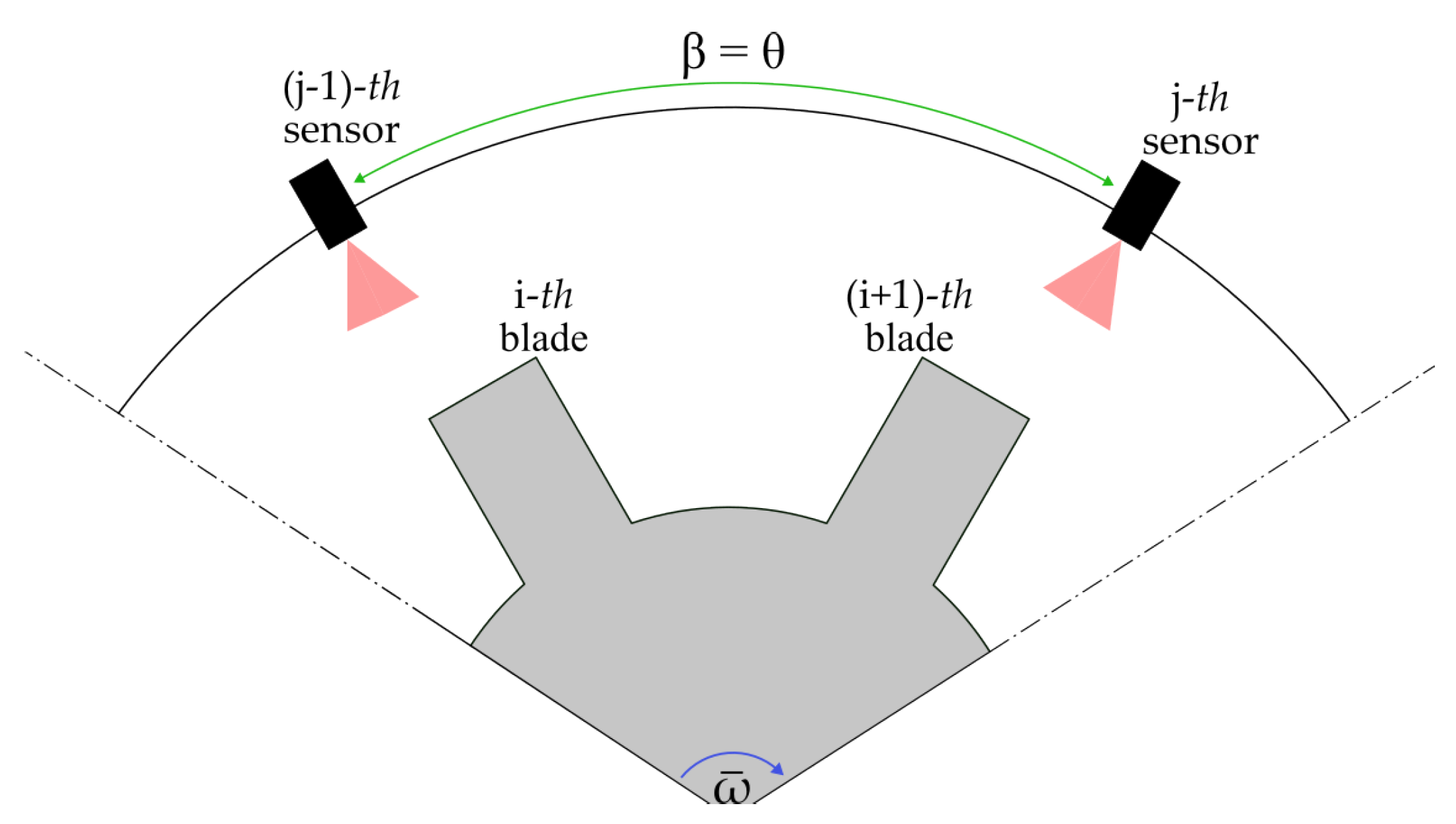
4.2. Uncertainty on Angle
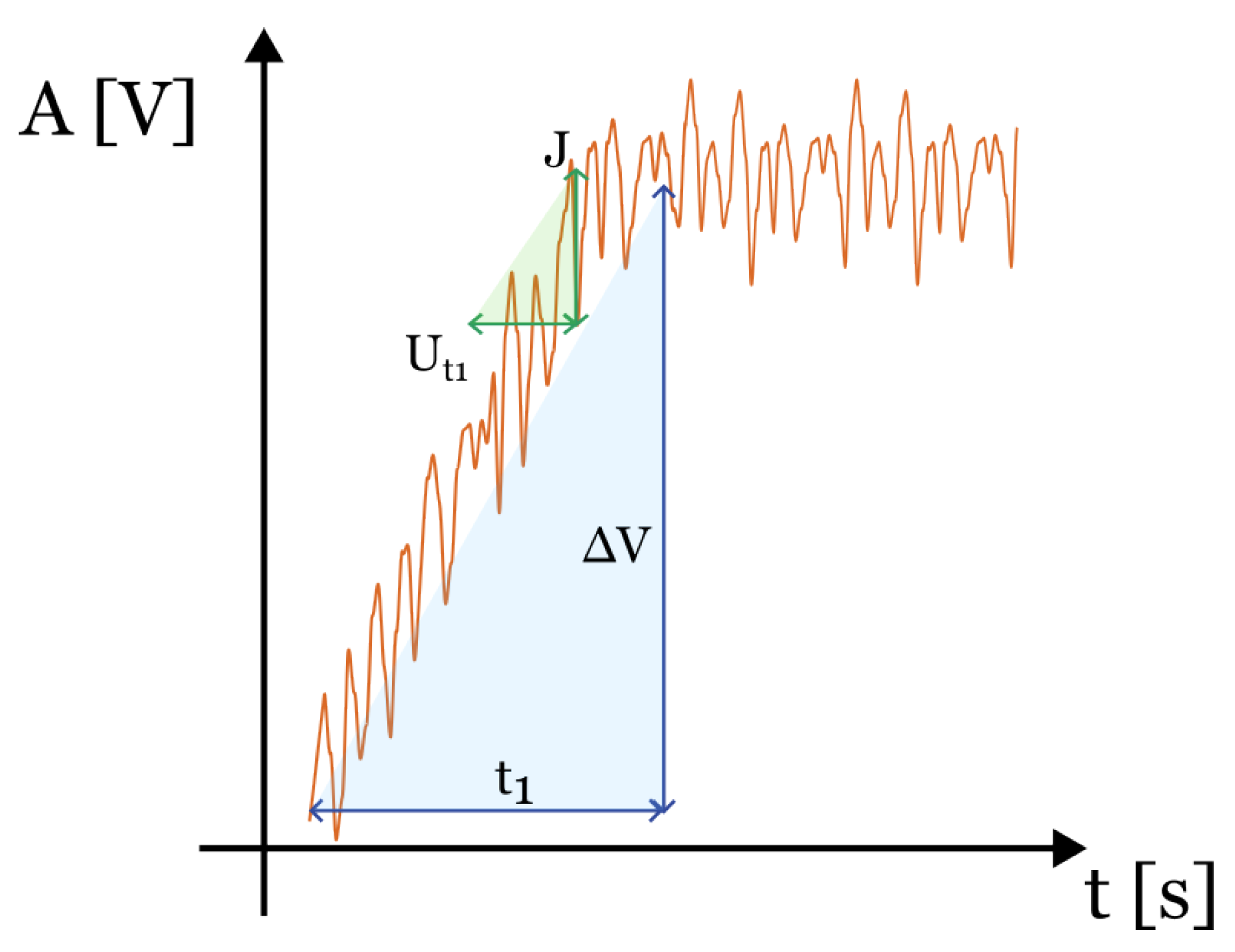
4.3. Uncertainty on Time Sample
5. Design of a Calibration Setup for Tip Timing Measurements
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| ref | Superscript for average rotational speed measurement system |
| Coefficient of uncertainty on the q variable | |
| d | Sensor spot diameter (m) |
| Sampling frequency of measurement system (Hz) | |
| J | Signal noise (V) |
| k | Index for rotor revolution for determining deflection amplitude |
| M | Number of time events for determining average rotational speed |
| N | Number of revolutions for determining deflection amplitude |
| Blade tip law of motion as sum of rotation and vibration (m) | |
| q | Generic variable |
| R | Radius (m) |
| Blade length (m) | |
| Rotor radius (m) | |
| s | Deflection sample (m) |
| Blade tip law of motion due to vibration (m) | |
| t | Time sample (s) |
| Rise time (s) | |
| Acquisition time resolution (s) | |
| Characteristic time of the acquisition system (s) | |
| Characteristic time due to the rising-edge slope of the signal (s) | |
| Characteristic time of the sensor (s) | |
| Variability interval of time samples (uniform distribution) (s) | |
| Blade tangential speed (m/s) | |
| z | Index for rotor time events for determining averaged rotational speed |
| Angle between two consecutive blades (rad) | |
| Generic angle (rad) | |
| Variation of blade length (m) | |
| Blade tip arrival time (s) | |
| Blade tip arrival time due to rotation (s) | |
| Blade tip arrival time due to vibration (s) | |
| Pulsed signal amplitude (V) | |
| Signal-to-noise ratio (dB) | |
| Rotational speed (rad/s) | |
| Rotational speed averaged on M revolutions (rad/s) | |
| Angle between two consecutive references for measuring average rotational speed (rad) | |
| Angle between two consecutive BTT probes (rad) | |
| Bandwidth of the sensor (Hz) | |
| Uncertainty on the q variable |
References
- Dixon, S.L.; Hall, C. Fluid Mechanics and Thermodynamics of Turbomachinery; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Lewis, R.I. Turbomachinery Performance Analysis; Butterworth-Heinemann: Oxford, UK, 1996. [Google Scholar]
- Knappett, D.; Garcia, J. Blade tip timing and strain gauge correlation on compressor blades. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2008, 222, 497–506. [Google Scholar] [CrossRef]
- Bian, Z.; Hu, H.; Yang, Y.; Chen, S.; Wei, F.; Shen, G.; Guan, F. A spectrum reconstruction method for blade vibration measurement based on probe waveform analysis. Measurement 2022, 199, 111425. [Google Scholar] [CrossRef]
- Russhard, P. The rise and fall of the rotor blade strain gauge. In Proceedings of the Vibration Engineering and Technology of Machinery: Proceedings of VETOMAC X 2014, Manchester, UK, 9–11 September 2014; Springer: Berlin/Heidelberg, Germany, 2015; pp. 27–37. [Google Scholar]
- Mevissen, F.; Meo, M. A review of NDT/structural health monitoring techniques for hot gas components in gas turbines. Sensors 2019, 19, 711. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Fan, Z.; Dong, J.; Chen, Y.; Cao, H.; Wei, D. An improved blade vibration difference-based two-parameter plot method for synchronous vibration parameter identification of rotating blades. Measurement 2023, 207, 112397. [Google Scholar] [CrossRef]
- Bornassi, S.; Berruti, T.; Firrone, C.; Battiato, G. Vibration parameters identification of turbomachinery rotor blades under transient condition using Blade Tip-Timing measurements. Measurement 2021, 183, 109861. [Google Scholar] [CrossRef]
- Dimitriadis, G.; Carrington, I.B.; Wright, J.R.; Cooper, J.E. Blade-tip timing measurement of synchronous vibrations of rotating bladed assemblies. Mech. Syst. Signal Process. 2002, 16, 599–622. [Google Scholar] [CrossRef]
- Li, H.; Tian, S.; Yang, Z.; Wu, S.; Chen, X. Phase-offset-based synchronous resonance identification method for blade tip timing signal. Measurement 2023, 218, 113166. [Google Scholar] [CrossRef]
- Woike, M.; Roeder, J.; Hughes, C.; Bencic, T. Testing of a microwave blade tip clearance sensor at the NASA Glenn Research Center. In Proceedings of the 47th AIAA Aerospace Sciences Meeting Including The New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009; p. 1452. [Google Scholar]
- García, I.; Beloki, J.; Zubia, J.; Aldabaldetreku, G.; Illarramendi, M.A.; Jiménez, F. An optical fiber bundle sensor for tip clearance and tip timing measurements in a turbine rig. Sensors 2013, 13, 7385–7398. [Google Scholar] [CrossRef]
- Tomassini, R.; Rossi, G.; Brouckaert, J.F. On the development of a magnetoresistive sensor for blade tip timing and blade tip clearance measurement systems. Rev. Sci. Instruments 2016, 87, 102505. [Google Scholar] [CrossRef]
- Ye, D.; Duan, F.; Jiang, J.; Niu, G.; Liu, Z.; Li, F. Identification of vibration events in rotating blades using a fiber optical tip timing sensor. Sensors 2019, 19, 1482. [Google Scholar] [CrossRef]
- Andrenelli, L.; Paone, N.; Rossi, G.; Tomasini, E.P. Non-intrusive measurement of blade tip vibration in turbomachines. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 1991; Volume 79023, p. V005T15A012. [Google Scholar]
- Andrenelli, L.; Paone, N.; Rossi, G. Large-bandwidth reflection fiber-optic sensors for turbomachinery rotor blade diagnostics. Sens. Actuators Phys. 1992, 32, 539–542. [Google Scholar] [CrossRef]
- Nava, P.; Paone, N.; Rossi, G.; Tomasini, E.P. Design and experimental characterization of a nonintrusive measurement system of rotating blade vibration. J. Eng. Gas Turbines Power 1994, 116, 657–662. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, Y.; Qiao, B.; Fu, S.; Liu, M.; Luo, X.; Chen, X. Full-field dynamic strain reconstruction of rotor blades under multi-mode vibration. Measurement 2022, 201, 111670. [Google Scholar] [CrossRef]
- Gao, C.; Wang, Z.; Yang, Z.; Cao, J.; Zuo, H.; Chen, X. An actual angle of arrival fitting method for correcting errors induced by speed fluctuation in blade tip timing system. Measurement 2024, 238, 115319. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, H.; Sun, R.; Yang, Z. Parameter identification based on iterative signal space in blade tip timing. Measurement 2024, 235, 114804. [Google Scholar] [CrossRef]
- Chen, Z.; Sheng, H.; Xia, Y.; Wang, W.; He, J. A comprehensive review on blade tip timing-based health monitoring: Status and future. Mech. Syst. Signal Process. 2021, 149, 107330. [Google Scholar] [CrossRef]
- Rossi, G.; Brouckaert, J.F. Design of blade tip timing measurements systems based on uncertainty analysis. In Proceedings of the International Instrumentation Symposium, San Diego, CA, USA, 4–8 June 2012; pp. 4–8. [Google Scholar]
- Russhard, P. Blade tip timing (BTT) uncertainties. In Proceedings of the AIP Conference Proceedings, Atlanta, GA, USA, 17–22 July 2016; AIP Publishing: New York, NY, USA, 2016; Volume 1740. [Google Scholar]
- Pan, M.; Yang, Y.; Guan, F.; Hu, H.; Xu, H. Sparse representation based frequency detection and uncertainty reduction in blade tip timing measurement for multi-mode blade vibration monitoring. Sensors 2017, 17, 1745. [Google Scholar] [CrossRef]
- Zhou, C.; Hu, H.; Guan, F.; Yang, Y. Modelling and simulation of blade tip timing uncertainty from rotational speed fluctuation. In Proceedings of the 2017 Prognostics and System Health Management Conference (PHM-Harbin), Harbin, China, 9–12 July 2017; pp. 1–5. [Google Scholar]
- Mohamed, M.E.; Bonello, P.; Russhard, P.; Procházka, P.; Mekhalfia, M.L.; Tchuisseu, E.B.T. Experimental validation of FEM-computed stress to tip deflection ratios of aero-engine compressor blade vibration modes and quantification of associated uncertainties. Mech. Syst. Signal Process. 2022, 178, 109257. [Google Scholar] [CrossRef]
- Capponi, L.; Tocci, T.; Marrazzo, M.; Marsili, R.; Rossi, G. Experimental investigation on hardware and triggering effect in tip-timing measurement uncertainty. Sensors 2023, 23, 1129. [Google Scholar] [CrossRef]
- Tocci, T.; Capponi, L.; Rossi, G.; Marsili, R.; Marrazzo, M. State-space model for arrival time simulations and methodology for offline blade Tip-Timing software characterization. Sensors 2023, 23, 2600. [Google Scholar] [CrossRef]
- Tribbiani, G.; Capponi, L.; Tocci, T.; Truffarelli, T.; Marsili, R.; Rossi, G. A theoretical model for uncertainty sources identification in tip-timing measurement systems. Acta IMEKO 2023, 12, 1–6. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, Z.J.; Wang, H.B.; Ma, Z.; Ni, Y.Q.; Jiang, J.; Sun, R.; Zhu, H.W. Towards high-accuracy data modelling, uncertainty quantification and correlation analysis for SHM measurements during typhoon events using an improved most likely heteroscedastic Gaussian process. Smart Struct. Syst. Int. J. 2023, 32, 267–279. [Google Scholar]
- Wang, Q.A.; Liu, Q.; Ma, Z.G.; Wang, J.F.; Ni, Y.Q.; Ren, W.X.; Wang, H.B. Data interpretation and forecasting of SHM heteroscedastic measurements under typhoon conditions enabled by an enhanced Hierarchical sparse Bayesian Learning model with high robustness. Measurement 2024, 230, 114509. [Google Scholar] [CrossRef]
- ISO/IEC Guide 98-3:2008; Guide to the Expression of Uncertainty in Measurement. ISO: Geneva, Switzerland, 2008.
- KCDB Database for Dimensional Metrology (Angle). Available online: https://www.bipm.org/kcdb/cmc/search?domain=PHYSICS&areaId=3&keywords=&specificPart.branch=12&specificPart.service=28&specificPart.subService=-1&specificPart.individualService=-1&_countries=1&countries=40&publicDateFrom=&publicDateTo=&unit=&minValue=&maxValue=&minUncertainty=&maxUncertainty= (accessed on 3 August 2024).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Unit |
|---|---|---|
| R | 1.50 × | m |
| M | 1.00 × | - |
| 2.00 × | rad/s | |
| 5.25 × | s | |
| 1.05 × | rad | |
| 6.28 × | rad | |
| 1.00 × | - | |
| 1.00 × | Hz | |
| d | 1.00 × | m |
| 3.00 × | m/s | |
| 1.00 × | Hz | |
| s | 3.00 × | m |
| Variable | Value | Unit |
|---|---|---|
| 1.50 × | m | |
| & | 6.28 × | rad |
| 1.00 × | s |
| Variable | Value | Units |
|---|---|---|
| 8.88 × | ||
| 2.47 × | ||
| 5.00 × | ||
| 5.07 × | ||
| 2.48 × | ||
| 4.45 × | m | |
| 14.8 | % |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Capponi, L.; Tribbiani, G.; Medici, V.; Fabri, S.; Prato, A.; Castellini, P.; Schiavi, A.; Paone, N.; Rossi, G. Design and Uncertainty Evaluation of a Calibration Setup for Turbine Blades Vibration Measurement. Sensors 2024, 24, 8050. https://doi.org/10.3390/s24248050
Capponi L, Tribbiani G, Medici V, Fabri S, Prato A, Castellini P, Schiavi A, Paone N, Rossi G. Design and Uncertainty Evaluation of a Calibration Setup for Turbine Blades Vibration Measurement. Sensors. 2024; 24(24):8050. https://doi.org/10.3390/s24248050
Chicago/Turabian StyleCapponi, Lorenzo, Giulio Tribbiani, Vittoria Medici, Sara Fabri, Andrea Prato, Paolo Castellini, Alessandro Schiavi, Nicola Paone, and Gianluca Rossi. 2024. "Design and Uncertainty Evaluation of a Calibration Setup for Turbine Blades Vibration Measurement" Sensors 24, no. 24: 8050. https://doi.org/10.3390/s24248050
APA StyleCapponi, L., Tribbiani, G., Medici, V., Fabri, S., Prato, A., Castellini, P., Schiavi, A., Paone, N., & Rossi, G. (2024). Design and Uncertainty Evaluation of a Calibration Setup for Turbine Blades Vibration Measurement. Sensors, 24(24), 8050. https://doi.org/10.3390/s24248050