
Motion Planning and Control with Environmental Uncertainties for Humanoid Robot


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Perceptive Motion Reference Framework
2.1. System Overview
2.2. Design of the Perceptive Motion Reference
2.3. Perceptive Motion Spatial Planning
2.4. Perceptive Motion Temporal Planning
3. Perceptive Motion Control
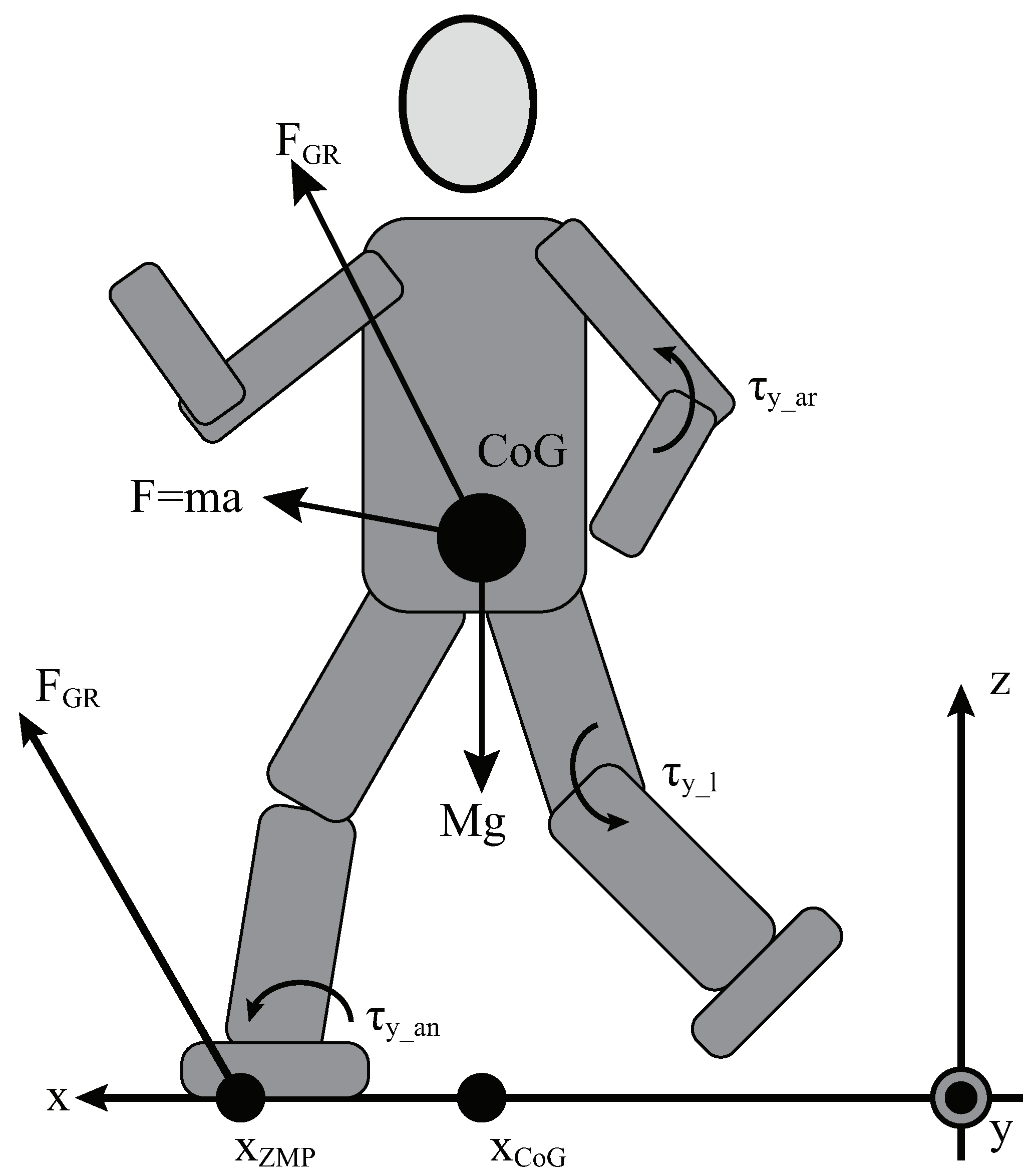
3.1. Dynamics Model
3.2. Translational Dynamics Equilibrium Perceptive Model
3.3. Rotational Dynamics Equilibrium Perceptive Model
3.4. Impact Dynamics Equilibrium Perceptive Model
3.5. Perceptive Control Law Formulation
4. Simulation and Experiment
4.1. Hardware Platform
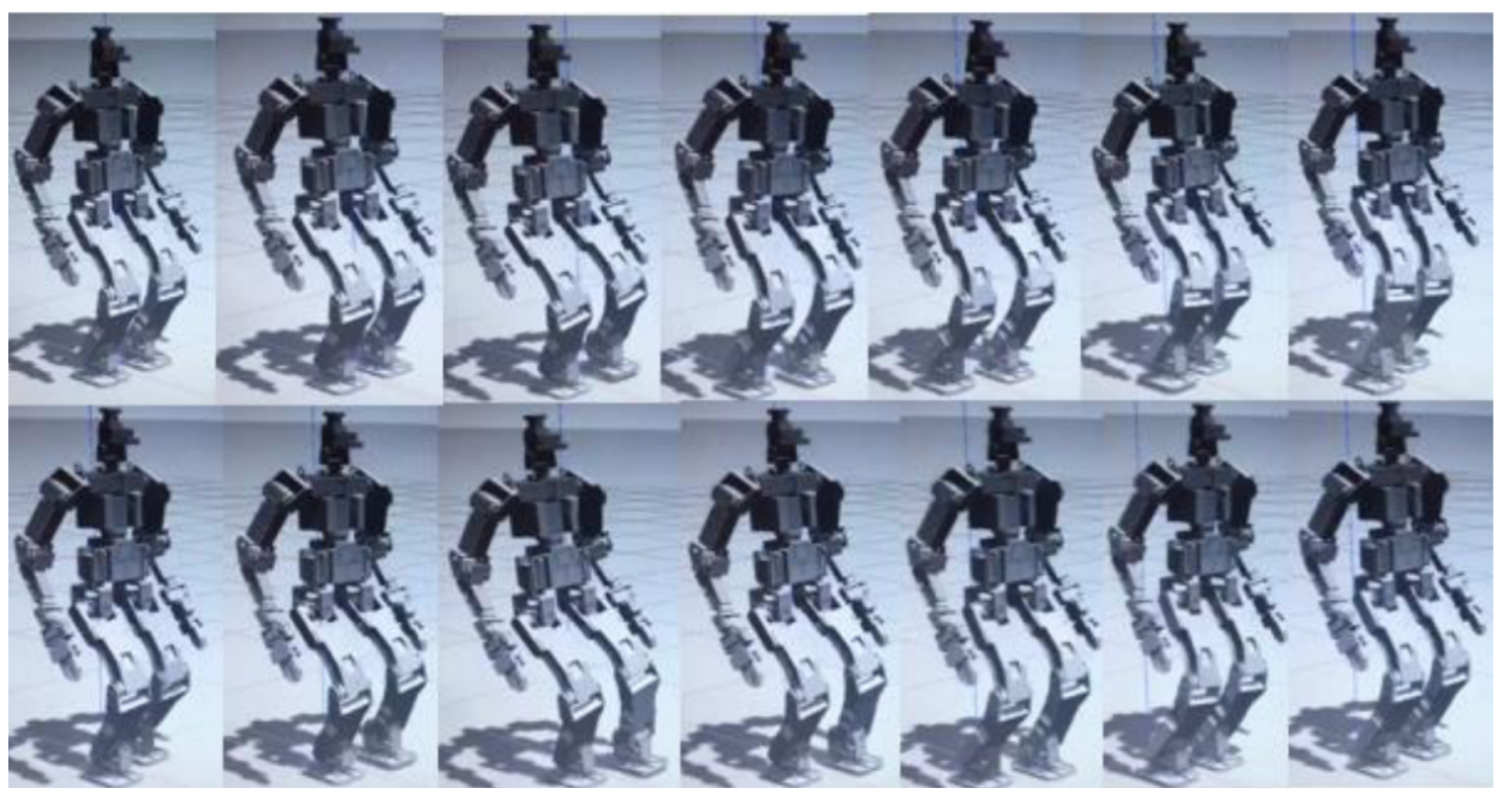
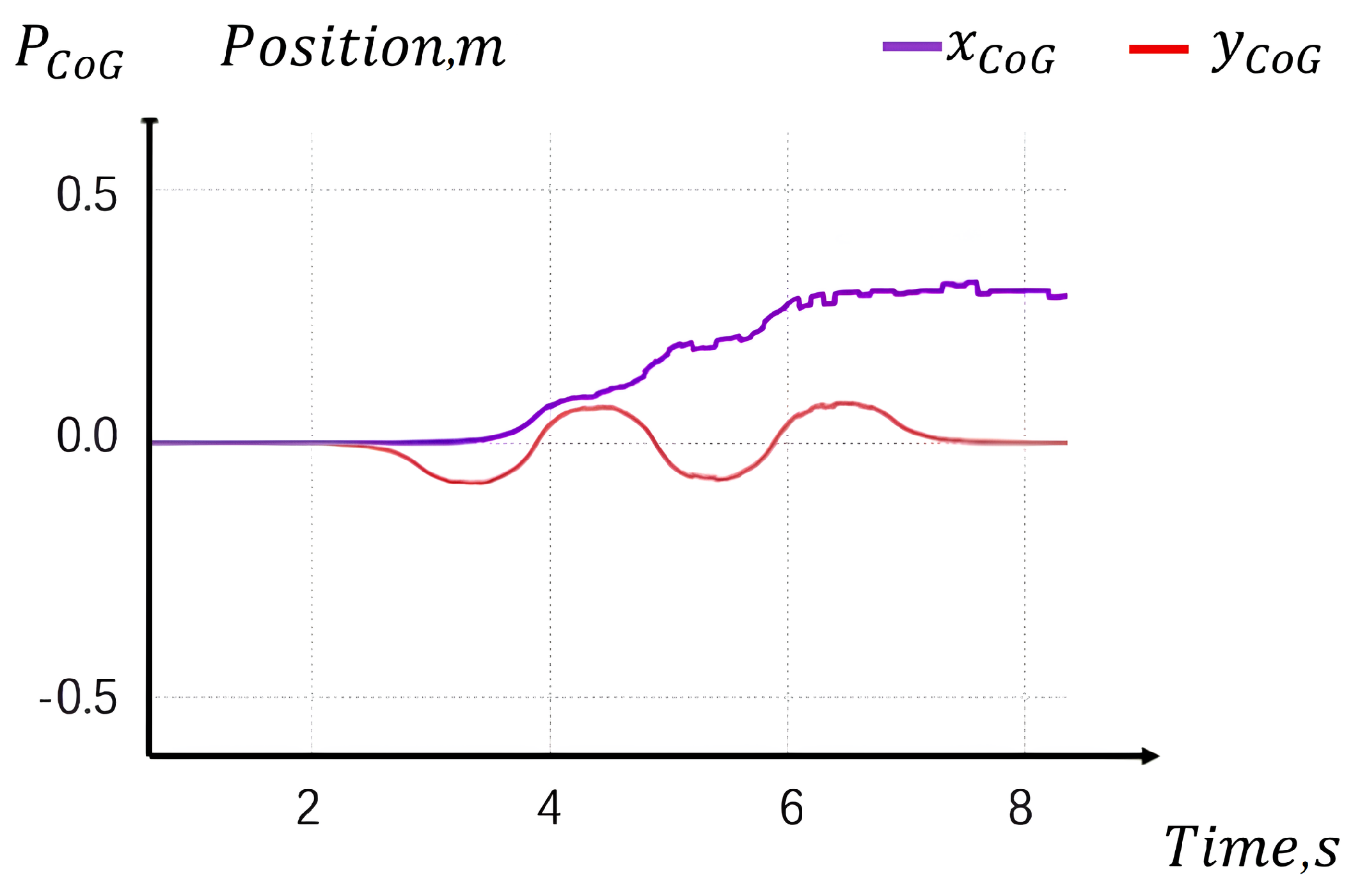
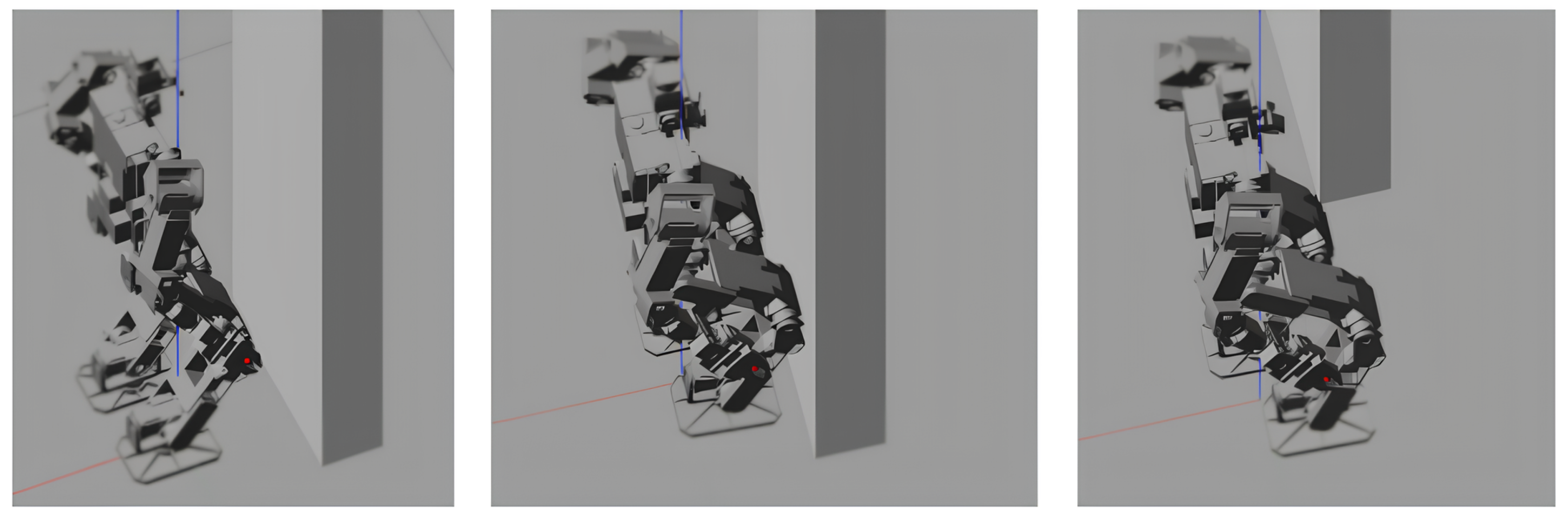
4.2. Simulation of Biped Robot Locomotion Under Disturbances
4.3. Experimental Test of Biped Robot Under Unexpected Disturbances
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hirukawa, H.; Kanehiro, F.; Kaneko, K.; Kajita, S.; Fujiwara, K.; Kawai, Y.; Tomita, F.; Hirai, S.; Tanie, K.; Isozumi, T.; et al. Humanoid robotics platforms developed in HRP. Robot. Auton. Syst. 2004, 48, 165–175. [Google Scholar] [CrossRef]
- Kaneko, K.; Harada, K.; Kanehiro, F.; Miyamori, G.; Akachi, K. Humanoid robot HRP-3. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2471–2478. Available online: https://ieeexplore.ieee.org/document/4650604 (accessed on 28 October 2024).
- Kaneko, K.; Kanehiro, F.; Morisawa, M.; Akachi, K.; Miyamori, G.; Hayashi, A.; Kanehira, N. Humanoid robot HRP-4—Humanoid robotics platform with lightweight and slim body. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 4400–4407. Available online: https://ieeexplore.ieee.org/document/6094465/ (accessed on 28 October 2024).
- Feng, S.; Whitman, E.; Xinjilefu, X.; Atkeson, C.G. Optimization based full body control for the Atlas robot. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 120–127. Available online: https://ieeexplore.ieee.org/document/7041347 (accessed on 28 October 2024).
- Gong, Y.; Hartley, R.; Da, X.; Hereid, A.; Harib, O.; Huang, J.-K.; Grizzle, J. Feedback control of a Cassie bipedal robot: Walking, standing, and riding a Segway. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 4559–4566. Available online: https://ieeexplore.ieee.org/document/8814833 (accessed on 28 October 2024).
- Castillo, G.A.; Weng, B.; Zhang, W.; Hereid, A. Robust feedback motion policy design using reinforcement learning on a 3D Digit bipedal robot. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 5136–5143. Available online: https://ieeexplore.ieee.org/document/9636467 (accessed on 28 October 2024).
- Zhong, Y.; Shirinzadeh, B.; Yuan, X. Optimal robot path planning with cellular neural network. Int. J. Intell. Mechatron. Robot. (IJIMR) 2011, 1, 20–39. [Google Scholar] [CrossRef]
- Zhong, Y.; Shirinzadeh, B.; Tian, Y. A new neural network for robot path planning. In Proceedings of the 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi’an, China, 2–5 July 2008; IEEE: New York, NY, USA, 2008; pp. 1361–1366. [Google Scholar] [CrossRef]
- Zhou, Q.; Gao, S.; Qu, B.; Gao, X.; Zhong, Y. Crossover recombination-based global-best brain storm optimization algorithm for UAV path planning. In Proceedings of the Romanian Academy Series A—Mathematics, Physics, Technical Sciences, Information Science; Publishing House of the Romanian Academy: Bucharest, Romania, 2022; Volume 23, pp. 207–216. [Google Scholar]
- Bahwini, T.; Zhong, Y.; Gu, C. Path planning in the presence of soft tissue deformation. In International Journal on Interactive Design and Manufacturing (IJIDeM); Springer: Berlin/Heidelberg, Germany, 2019; Volume 13, pp. 1603–1616. [Google Scholar] [CrossRef]
- Hills, J.; Zhong, Y. Cellular neural network-based thermal modelling for real-time robotic path planning. In International Journal of Agile Systems and Management; Inderscience Publishers Ltd.: Geneva, Switzerland, 2014; Volume 7, pp. 261–281. [Google Scholar] [CrossRef]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 2, pp. 1620–1626. Available online: https://ieeexplore.ieee.org/document/1241826/ (accessed on 28 October 2024).
- Yang, C. Interval Riccati equation-based and non-probabilistic dynamic reliability-constrained multi-objective optimal vibration control with multi-source uncertainties. J. Sound Vib. 2025, 595, 118742. [Google Scholar] [CrossRef]
- Adu-Bredu, A.; Gibson, G.; Grizzle, J. Exploring kinodynamic fabrics for reactive whole-body control of underactuated humanoid robots. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 10397–10404. Available online: https://ieeexplore.ieee.org/document/10342091/ (accessed on 28 October 2024).
- Liu, W.; Liang, X.; Zheng, M. Task-constrained motion planning considering uncertainty-informed human motion prediction for human–robot collaborative disassembly. IEEE/ASME Trans. Mechatronics 2023, 28, 2056–2063. Available online: https://ieeexplore.ieee.org/document/10138312/ (accessed on 28 October 2024). [CrossRef]
- Hu, G.; Ni, L.; Gao, B.; Zhu, X.; Wang, W.; Zhong, Y. Model predictive based unscented Kalman filter for hypersonic vehicle navigation with INS/GNSS integration. IEEE Access 2019, 8, 4814–4823. [Google Scholar] [CrossRef]
- Katayama, S.; Murooka, M.; Tazaki, Y. Model predictive control of legged and humanoid robots: Models and algorithms. Adv. Robot. 2023, 37, 298–315. [Google Scholar] [CrossRef]
- Harbi, I.; Rodriguez, J.; Liegmann, E.; Makhamreh, H.; Heldwein, M.L.; Novak, M.; Rossi, M.; Abdelrahem, M.; Trabelsi, M.; Ahmed, M.; et al. Model-predictive control of multilevel inverters: Challenges, recent advances, and trends. IEEE Trans. Power Electron. 2023, 38, 10845–10868. [Google Scholar] [CrossRef]
- Rudin, N.; Hoeller, D.; Reist, P.; Hutter, M. Learning to walk in minutes using massively parallel deep reinforcement learning. In Proceedings of the Conference on Robot Learning, Auckland, New Zealand, 14–18 December 2022; PMLR. pp. 91–100. Available online: https://proceedings.mlr.press/v164/rudin22a.html (accessed on 28 October 2024).
- Yang, C.; Fan, Z.; Lu, W.; Gao, H. Uncertain iterative optimal attitude control method for periodic satellite with reliability constraint. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 6461–6473. Available online: https://ieeexplore.ieee.org/document/10540193 (accessed on 28 October 2024). [CrossRef]
- Yang, C.; Wang, Q.; Lu, W.; Li, Y. Integrated uncertain optimal design strategy for truss configuration and attitude–vibration control in rigid–flexible coupling structure with interval uncertainties. Nonlinear Dyn. 2024, 1–24. [Google Scholar] [CrossRef]
- Forbes, M.G.; Patwardhan, R.S.; Hamadah, H.; Gopaluni, R.B. Model predictive control in industry: Challenges and opportunities. IFAC-PapersOnLine 2015, 48, 531–538. [Google Scholar] [CrossRef]
- Rutschmann, M.; Satzinger, B.; Byl, M.; Byl, K. Nonlinear model predictive control for rough-terrain robot hopping. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1859–1864. Available online: https://ieeexplore.ieee.org/document/6385865/ (accessed on 28 October 2024).
- Kashyap, A.K.; Parhi, D.R. Optimization of stability of humanoid robot NAO using ant colony optimization tuned MPC controller for uneven path. Soft Comput. 2021, 25, 5131–5150. [Google Scholar] [CrossRef]
- Popovic, M.B.; Goswami, A.; Herr, H. Ground reference points in legged locomotion: Definitions, biological trajectories and control implications. Int. J. Robot. Res. 2005, 24, 1013–1032. [Google Scholar] [CrossRef]
- Xi, N.; Tarn, T.-J.; Bejczy, A.K. Intelligent planning and control for multirobot coordination: An event-based approach. IEEE Trans. Robot. Autom. 1996, 12, 439–452. Available online: https://ieeexplore.ieee.org/document/499825 (accessed on 28 October 2024).
- Xi, N.; Tarn, T.-J. Stability analysis of non-time referenced internet-based telerobotic systems. Robot. Auton. Syst. 2000, 32, 173–178. [Google Scholar] [CrossRef]
- Latella, C.; Traversaro, S.; Ferigo, D.; Tirupachuri, Y.; Rapetti, L.; Andrade Chavez, F.J.; Nori, F.; Pucci, D. Simultaneous floating-base estimation of human kinematics and joint torques. Sensors 2019, 19, 2794. [Google Scholar] [CrossRef] [PubMed]
- Wahrmann, D.; Wu, Y.; Sygulla, F.; Hildebrandt, A.-C.; Wittmann, R.; Seiwald, P.; Rixen, D. Time-variable, event-based walking control for biped robots. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418768918. [Google Scholar] [CrossRef]
- Hamed, K.A.; Kim, J.; Pandala, A. Quadrupedal locomotion via event-based predictive control and QP-based virtual constraints. IEEE Robot. Autom. Lett. 2020, 5, 4463–4470. Available online: https://ieeexplore.ieee.org/document/9113252 (accessed on 28 October 2024). [CrossRef]
- Kuindersma, S.; Permenter, F.; Tedrake, R. An efficiently solvable quadratic program for stabilizing dynamic locomotion. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2589–2594. Available online: https://ieeexplore.ieee.org/document/6907230 (accessed on 28 October 2024).
- Chevallereau, C.; Formal’sky, A.; Djoudi, D. Tracking a joint path for the walk of an underactuated biped. Robotica 2004, 22, 15–28. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Z.; Wang, Y.; Wang, S.; Bi, S.; Chen, J. Motion Planning and Control with Environmental Uncertainties for Humanoid Robot. Sensors 2024, 24, 7652. https://doi.org/10.3390/s24237652
Jiang Z, Wang Y, Wang S, Bi S, Chen J. Motion Planning and Control with Environmental Uncertainties for Humanoid Robot. Sensors. 2024; 24(23):7652. https://doi.org/10.3390/s24237652
Chicago/Turabian StyleJiang, Zhiyong, Yu Wang, Siyu Wang, Sheng Bi, and Jiangcheng Chen. 2024. "Motion Planning and Control with Environmental Uncertainties for Humanoid Robot" Sensors 24, no. 23: 7652. https://doi.org/10.3390/s24237652
APA StyleJiang, Z., Wang, Y., Wang, S., Bi, S., & Chen, J. (2024). Motion Planning and Control with Environmental Uncertainties for Humanoid Robot. Sensors, 24(23), 7652. https://doi.org/10.3390/s24237652