

Distributed Sequential Detection for Cooperative Spectrum Sensing in Cognitive Internet of Things


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- We formulate a distributed cognitive IoT model without a centralized fusion center (FC) and make use of energy detection to evaluate the local spectrum sensing performance of the IoT device. Furthermore, we also present a sequential detection framework to pave the way for the CSS of a pair of IoT devices.
- On the basis of the proposed distributed cognitive IoT and CSS models, the sensing time and decision cost are defined, and the joint optimization problem between them is proposed. Then, the person-by-person optimization (PBPO) approach is applied to distributed sequential detection to address this optimization problem.
- The optimal sensing time and threshold are analyzed by dynamic programming to obtain the optimal decision rule. At last, simulation results show the correctness and effectiveness of our proposed sequential detection rule in terms of sensing time and thresholds.
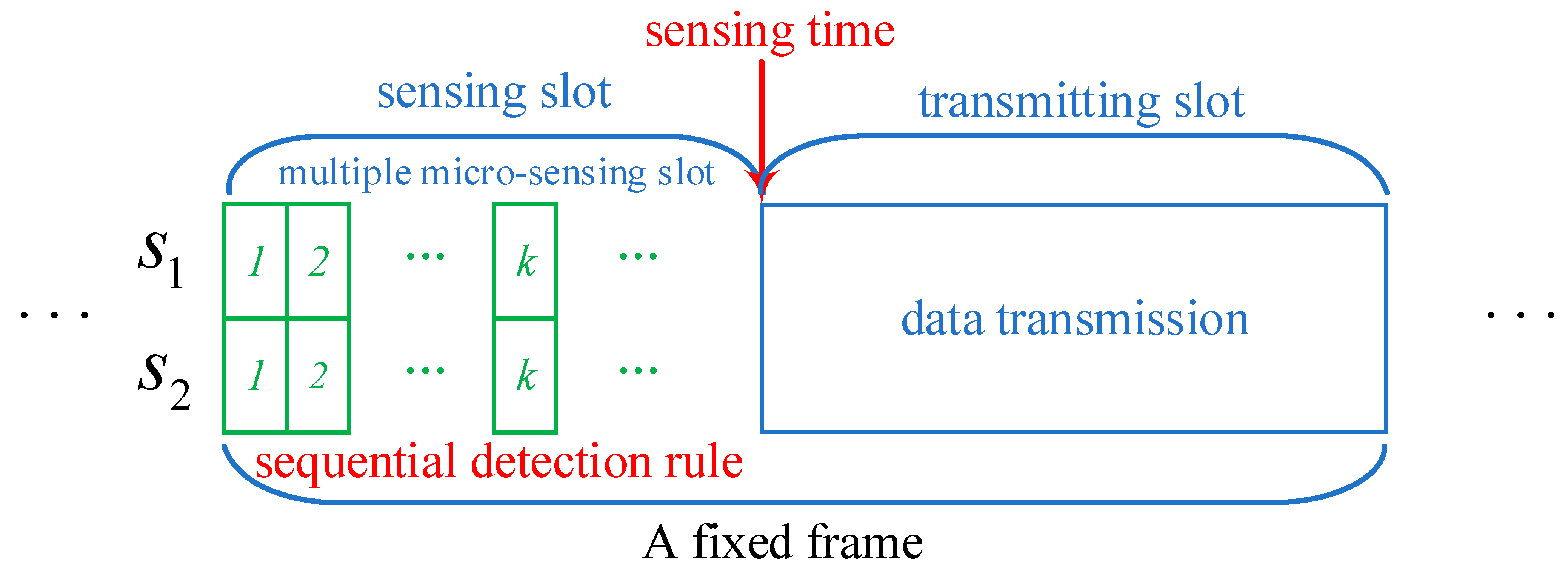
2. System Model
2.1. Spectrum Sensing Model
2.2. Sequential Detection
3. Distributed Sequential Detection
3.1. Problem Formulation
3.2. Preliminary Analysis
- (1)
- When , we have
- (2)
- When , , we have
3.3. Optimal Sensing Time
3.4. Optimal Decision Rule
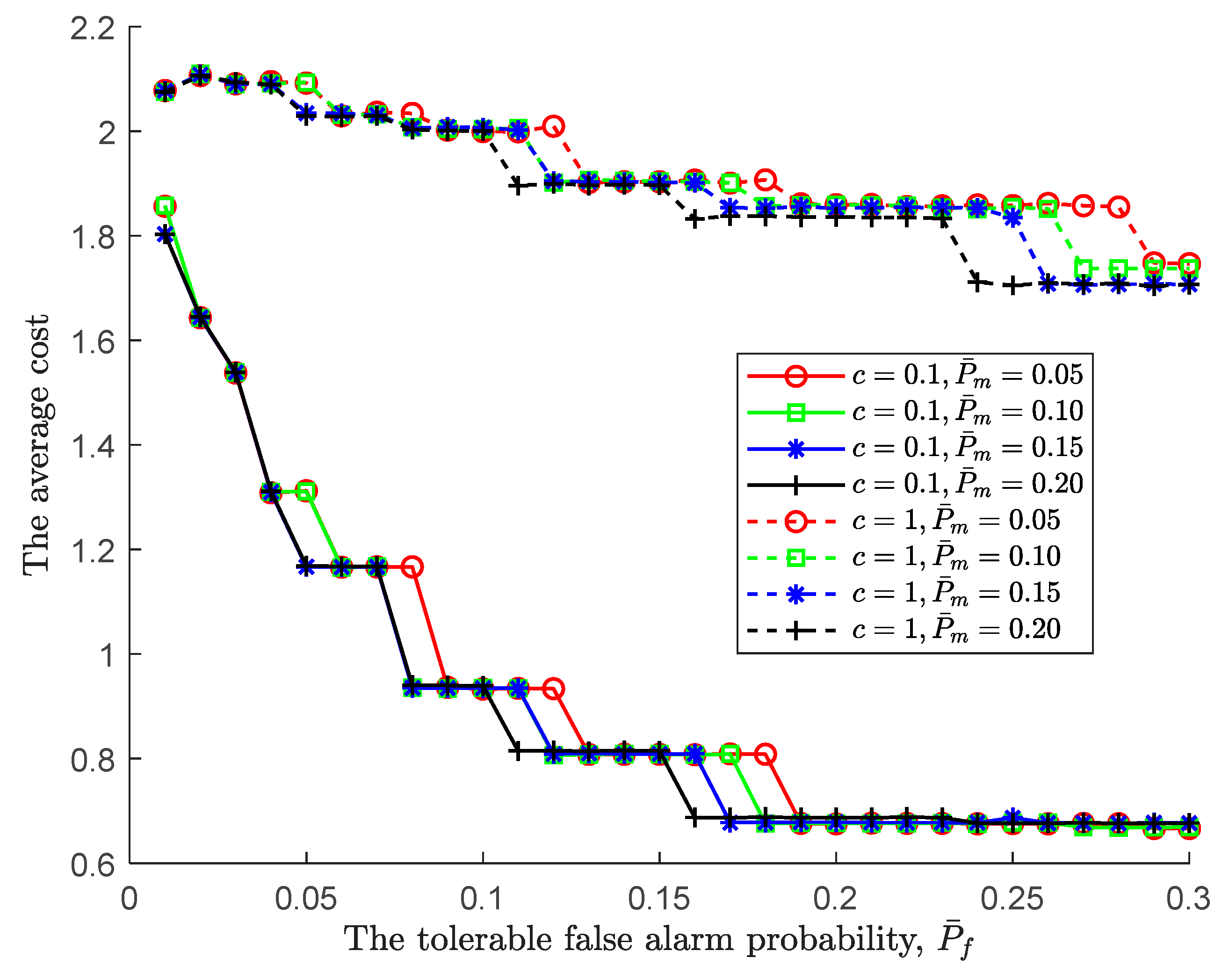
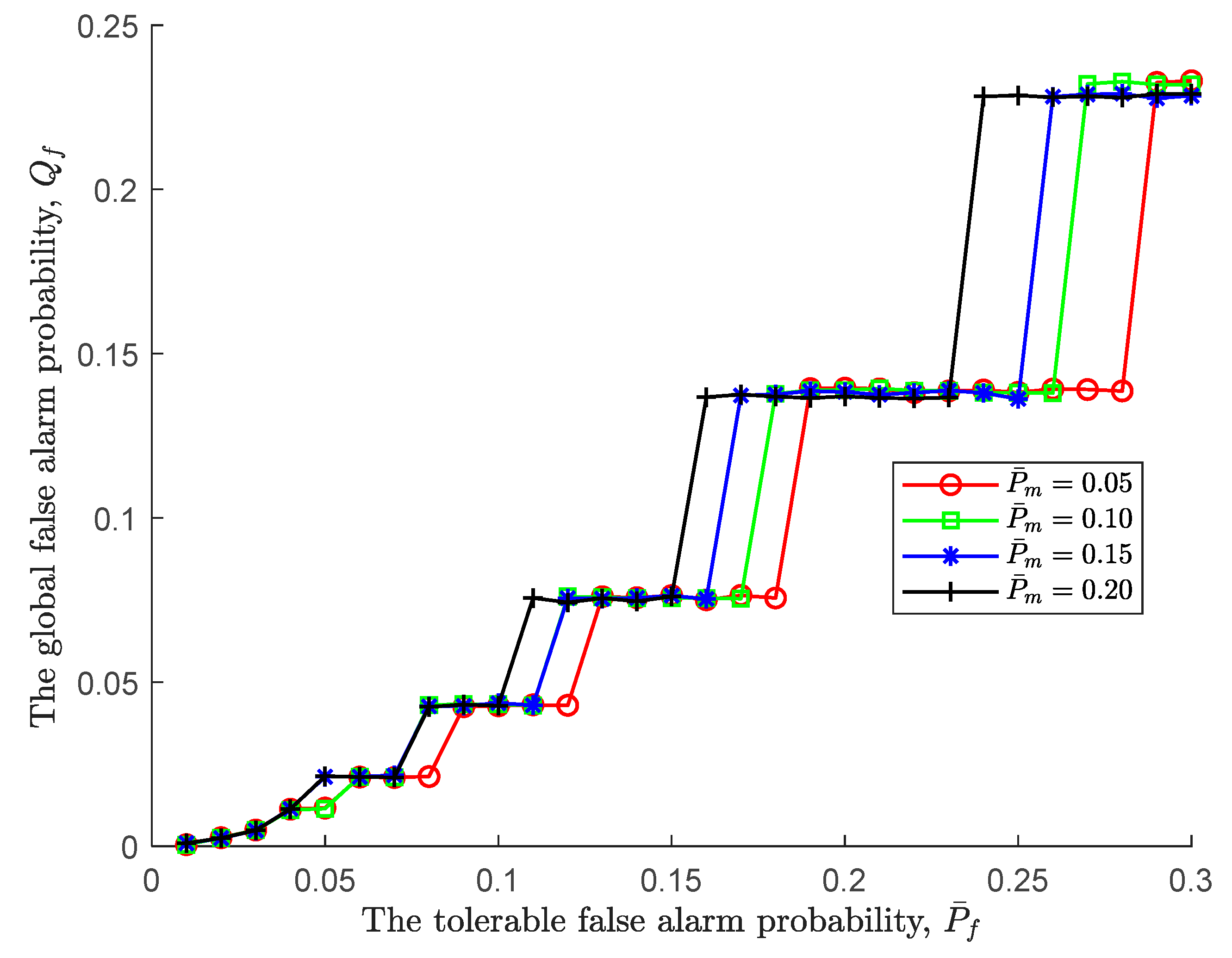
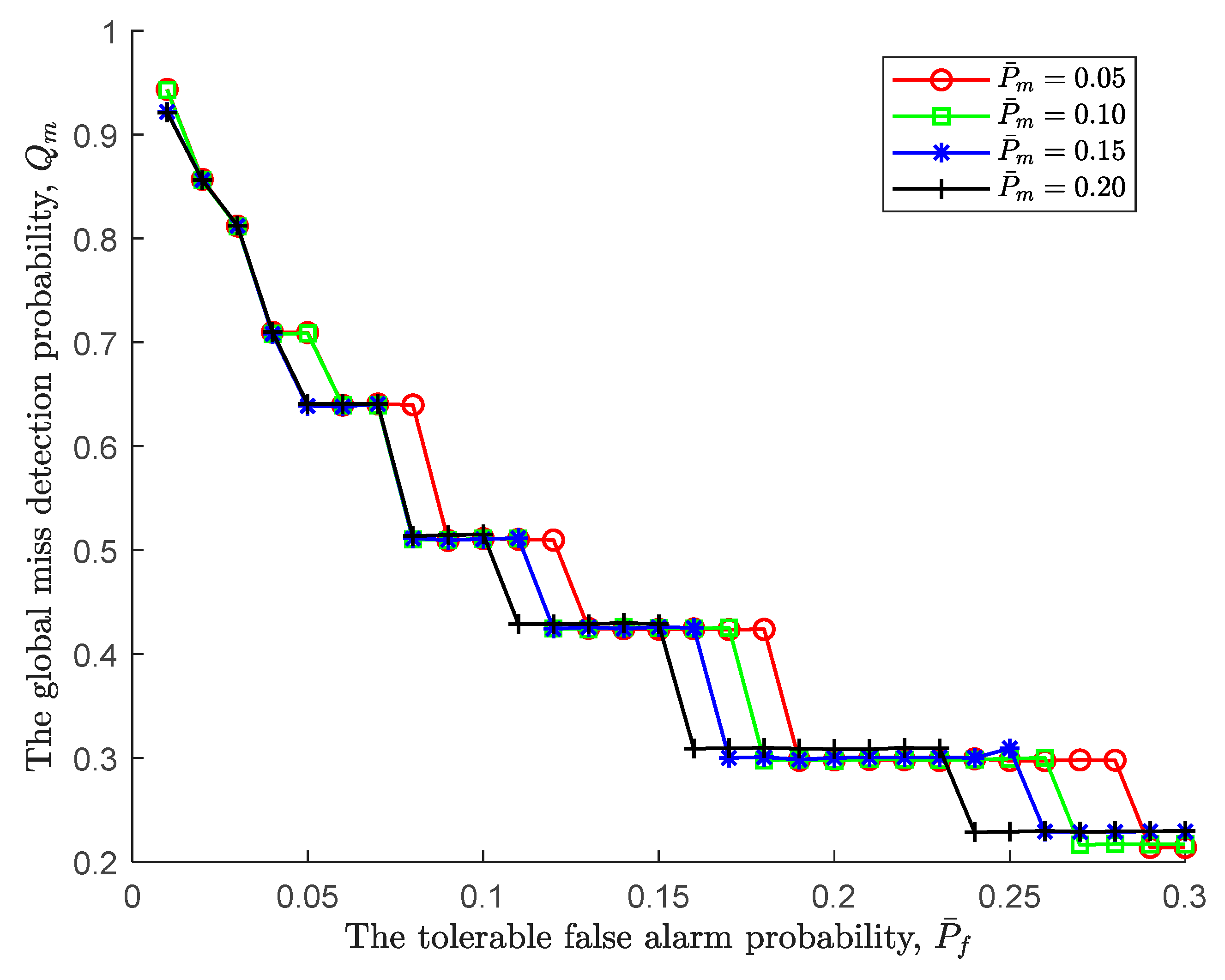
4. Simulation Results
4.1. Performance Analysis
4.2. Performance Comparision
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nasser, A.; Al Haj Hassan, H.; Abou Chaaya, J.; Mansour, A.; Yao, K.C. Spectrum sensing for cognitive radio: Recent advances and future challenge. Sensors 2021, 21, 2408. [Google Scholar] [CrossRef]
- Arjoune, Y.; Kaabouch, N. A comprehensive survey on spectrum sensing in cognitive radio networks: Recent advances, new challenges, and future research directions. Sensors 2019, 19, 126. [Google Scholar] [CrossRef]
- Liu, X.; Jia, M.; Zhou, M.; Wang, B.; Durrani, T.S. Integrated cooperative spectrum sensing and access control for cognitive industrial Internet of Things. IEEE Internet Things J. 2023, 10, 1887–1896. [Google Scholar] [CrossRef]
- Gharib, A.; Ejaz, W.; Ibnkahla, M. Distributed spectrum sensing for iot networks: Architecture, challenges, and learning. IEEE Internet Things Mag. 2021, 4, 66–73. [Google Scholar] [CrossRef]
- Zhu, R.; Zhang, X.; Liu, X.; Shu, W.; Mao, T.; Jalaian, B. ERDT: Energy-efficient reliable decision transmission for intelligent cooperative spectrum sensing in industrial IoT. IEEE Access 2015, 3, 2366–2378. [Google Scholar] [CrossRef]
- Ansere, J.A.; Han, G.; Wang, H.; Choi, C.; Wu, C. A reliable energy efficient dynamic spectrum sensing for cognitive radio IoT networks. IEEE Internet Things J. 2019, 6, 6748–6759. [Google Scholar] [CrossRef]
- Wan, R.; Wu, M.; Hu, L.; Wang, H. Energy-efficient cooperative spectrum sensing scheme based on spatial correlation for cognitive internet of things. IEEE Access 2020, 8, 139501–139511. [Google Scholar] [CrossRef]
- Miah, M.S.; Hossain, M.A.; Ahmed, K.M.; Rahman, M.M.; Calhan, A. An energy efficient cooperative spectrum sensing for cognitive radio-internet of things with interference constraints. Res. Sq. 2021. [Google Scholar] [CrossRef]
- Dao, N.N.; Na, W.; Tran, A.T.; Nguyen, D.N.; Cho, S. Energy-efficient spectrum sensing for IoT devices. IEEE Syst. J. 2020, 15, 1077–1085. [Google Scholar] [CrossRef]
- Long, Y.; Li, Y.; Ju, H.; He, R.; Fang, X. Throughput optimization in energy harvesting based cognitive iot with cooperative sensing. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–5. [Google Scholar]
- Abbas, G.; Abbas, Z.H.; Waqas, M.; Hassan, A.K. Spectrum utilization efficiency in the cognitive radio enabled 5G-based IoT. J. Netw. Comput. Appl. 2020, 164, 102686. [Google Scholar]
- Gharib, A.; Ejaz, W.; Ibnkahla, M. Scalable learning-based heterogeneous multi-band multi-user cooperative spectrum sensing for distributed IoT systems. IEEE Open J. Commun. Soc. 2020, 1, 1066–1083. [Google Scholar] [CrossRef]
- Ejaz, W.; Ibnkahla, M. Multiband spectrum sensing and resource allocation for IoT in cognitive 5G networks. IEEE Internet Things J. 2017, 5, 150–163. [Google Scholar] [CrossRef]
- Zhang, L.; Liang, Y.C. Joint spectrum sensing and packet error rate optimization in cognitive IoT. IEEE Internet Things J. 2019, 6, 7816–7827. [Google Scholar] [CrossRef]
- Miah, M.S.; Ahmed, K.M.; Islam, M.K.; Mahmud, M.A.R.; Rahman, M.M.; Yu, H. Enhanced sensing and sum-rate analysis in a cognitive radio-based internet of things. Sensors 2020, 20, 2525. [Google Scholar] [CrossRef]
- Lu, W.; Hu, S.; Liu, X.; He, C.; Gong, Y. Incentive mechanism based cooperative spectrum sharing for OFDM cognitive IoT network. IEEE Trans. Netw. Sci. Eng. 2019, 7, 662–672. [Google Scholar] [CrossRef]
- Gao, S.; Zhang, N.; Kang, G. Improved cooperative spectrum sensing scheme using truncated SPRT in internet of things. In Proceedings of the 2019 IEEE 2nd International Conference on Electronic Information and Communication Technology (ICEICT), Harbin, China, 20–22 January 2019; pp. 89–93. [Google Scholar]
- Wu, J.; Li, P.; Zhang, J.; Chen, Z.; Bao, J. SPRT-based cooperative spectrum sensing with performance requirements in cognitive unmanned aerial vehicle networks (CUAVNs). Seq. Anal. 2022, 41, 53–67. [Google Scholar] [CrossRef]
- Balachander, T.; Ramana, K.; Mohana, R.M.; Srivastava, G.; Gadekallu, T.R. Cooperative Spectrum Sensing Deployment for Cognitive Radio Networks for Internet of Things 5G Wireless Communication. Tsinghua Sci. Technol. 2023, 29, 698–720. [Google Scholar] [CrossRef]
- Mehmood, G.; Khan, M.Z.; Bashir, A.K.; Al-Otaibi, Y.D.; Khan, S. An Efficient QoS-Based Multi-Path Routing Scheme for Smart Healthcare Monitoring in Wireless Body Area Networks. Comput. Electr. Eng. 2023, 109, 108517. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Hu, Y.; Li, D.; Wang, J.; Al-Dhahir, N. Pain without gain: Destructive beamforming from a malicious RIS perspective in IoT networks. IEEE Internet Things J. 2023; early access. [Google Scholar] [CrossRef]
- Ma, R.; Yang, W.; Shi, H.; Lu, X.; Liu, J. Covert communication with a spectrum sharing relay in the finite blocklength regime. China Commun. 2023, 20, 195–211. [Google Scholar] [CrossRef]
- An, K.; Lin, M.; Ouyang, J.; Zhu, W.P. Secure transmission in cognitive satellite terrestrial networks. IEEE J. Sel. Areas Commun. 2016, 34, 3025–3037. [Google Scholar] [CrossRef]
- Liang, Y.C.; Zeng, Y.; Peh, E.C.; Hoang, A.T. Sensing-throughput tradeoff for cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 1326–1337. [Google Scholar] [CrossRef]
- Poor, H.V.; Hadjiliadis, O. Quickest Detection; Cambridge University Press: London, UK, 2008. [Google Scholar]
- Varshney, P.K. Distributed Detection and Data Fusion; Springer Science & Business Media: New York, NY, USA, 1996. [Google Scholar]
- Barron, E.N.; Ishii, H. The Bellman equation for minimizing the maximum cost. Nonlinear Anal. Theory Methods Appl. 1989, 13, 1067–1090. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Qiu, Z.; Dai, M.; Bao, J.; Xu, X.; Cao, W. Distributed Sequential Detection for Cooperative Spectrum Sensing in Cognitive Internet of Things. Sensors 2024, 24, 688. https://doi.org/10.3390/s24020688
Wu J, Qiu Z, Dai M, Bao J, Xu X, Cao W. Distributed Sequential Detection for Cooperative Spectrum Sensing in Cognitive Internet of Things. Sensors. 2024; 24(2):688. https://doi.org/10.3390/s24020688
Chicago/Turabian StyleWu, Jun, Zhaoyang Qiu, Mingyuan Dai, Jianrong Bao, Xiaorong Xu, and Weiwei Cao. 2024. "Distributed Sequential Detection for Cooperative Spectrum Sensing in Cognitive Internet of Things" Sensors 24, no. 2: 688. https://doi.org/10.3390/s24020688
APA StyleWu, J., Qiu, Z., Dai, M., Bao, J., Xu, X., & Cao, W. (2024). Distributed Sequential Detection for Cooperative Spectrum Sensing in Cognitive Internet of Things. Sensors, 24(2), 688. https://doi.org/10.3390/s24020688