
Design of a Shape-Memory-Alloy-Based Carangiform Robotic Fishtail with Improved Forward Thrust



Abstract
1. Introduction
2. Materials and Methods
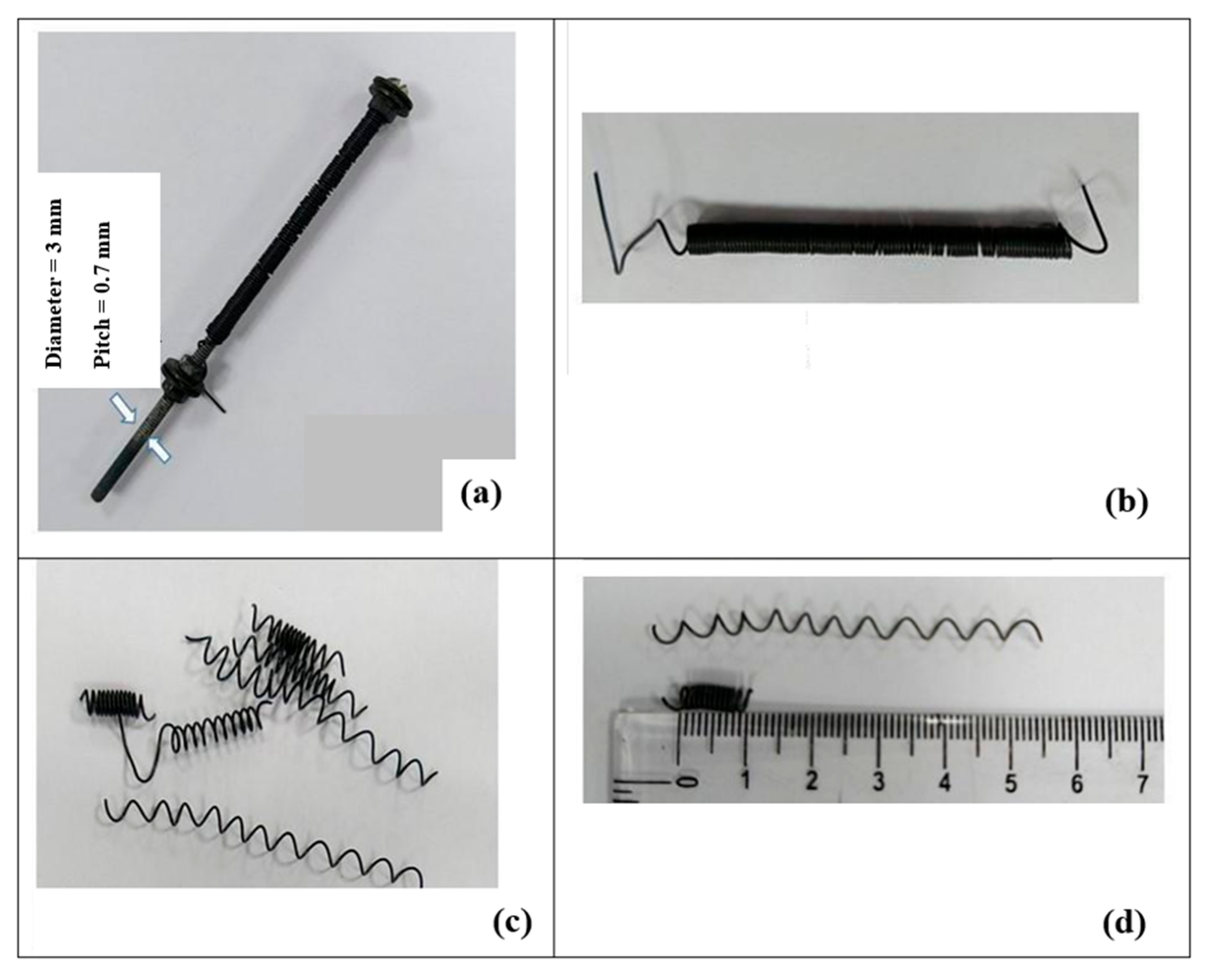
2.1. Actuator Design
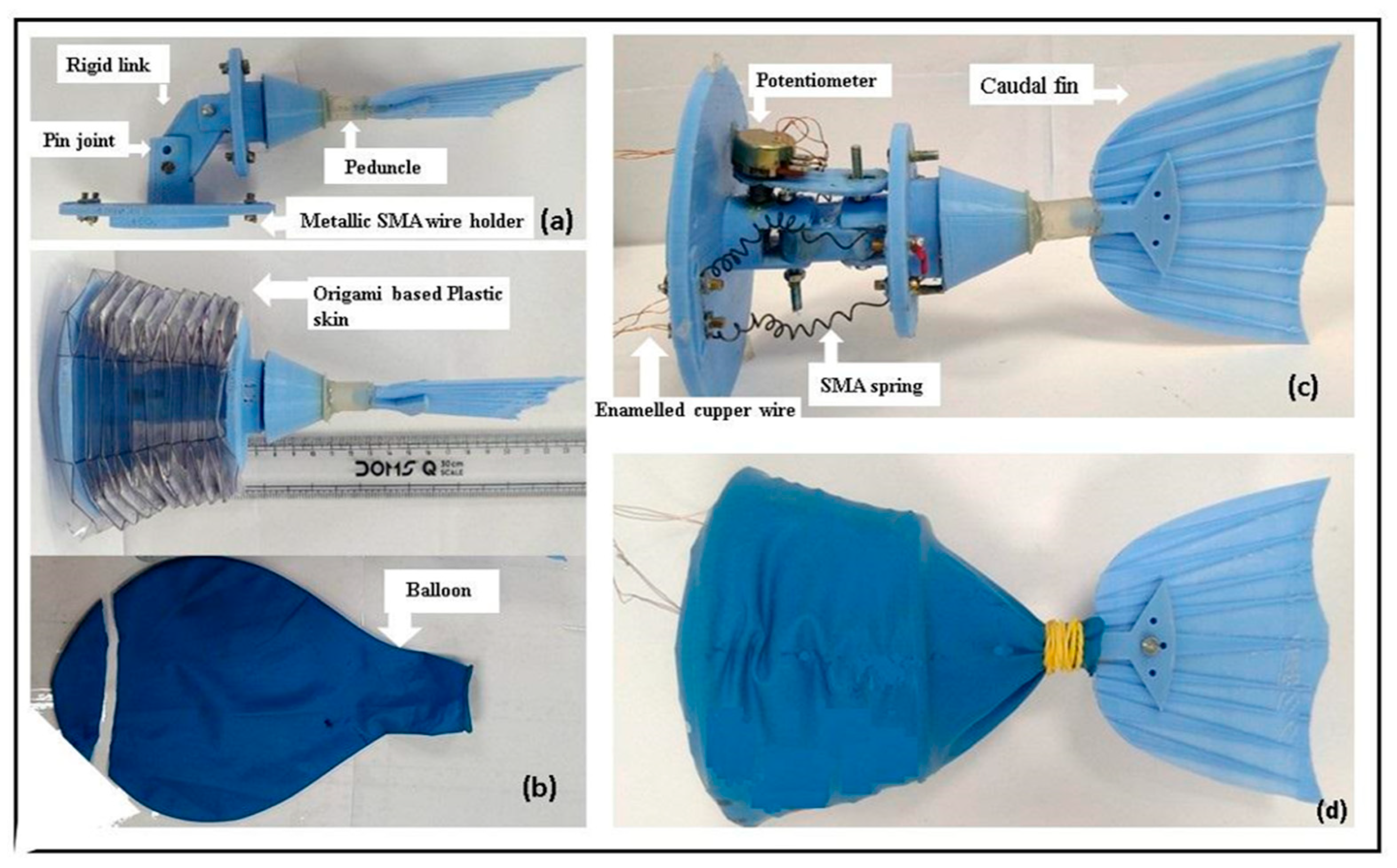
2.2. Tail Body and Caudal Fin Design
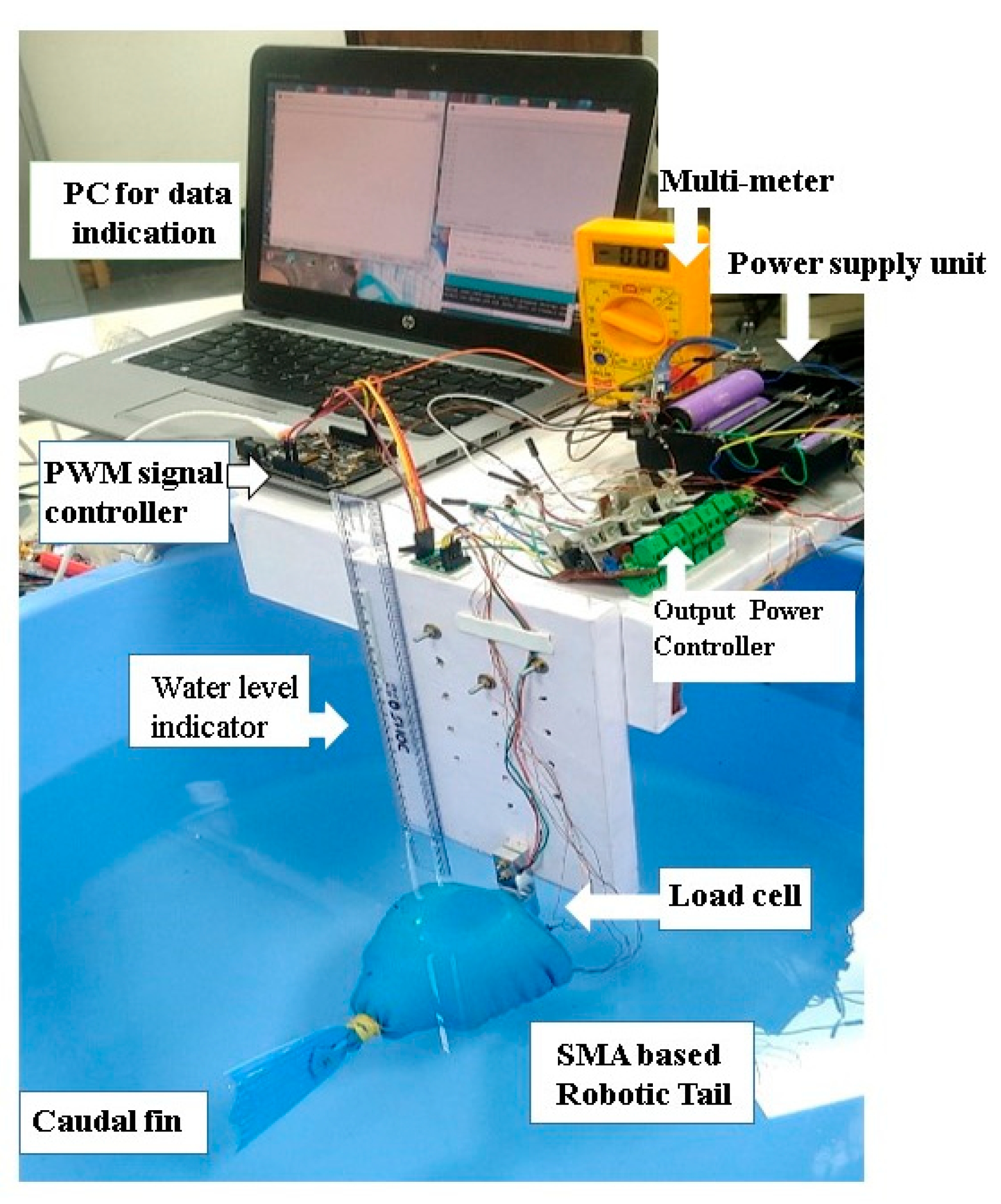
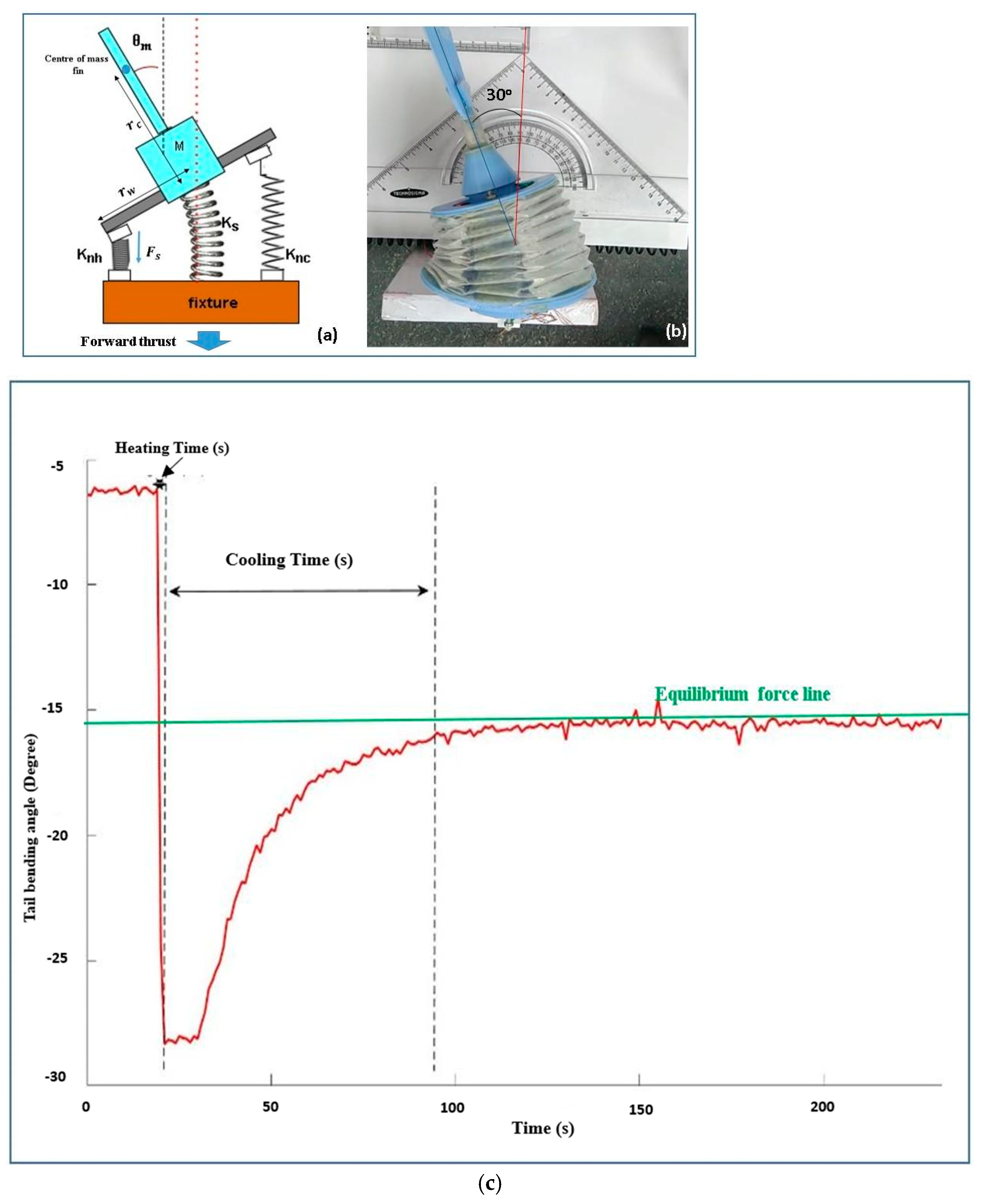
2.3. Experimental Setup Design
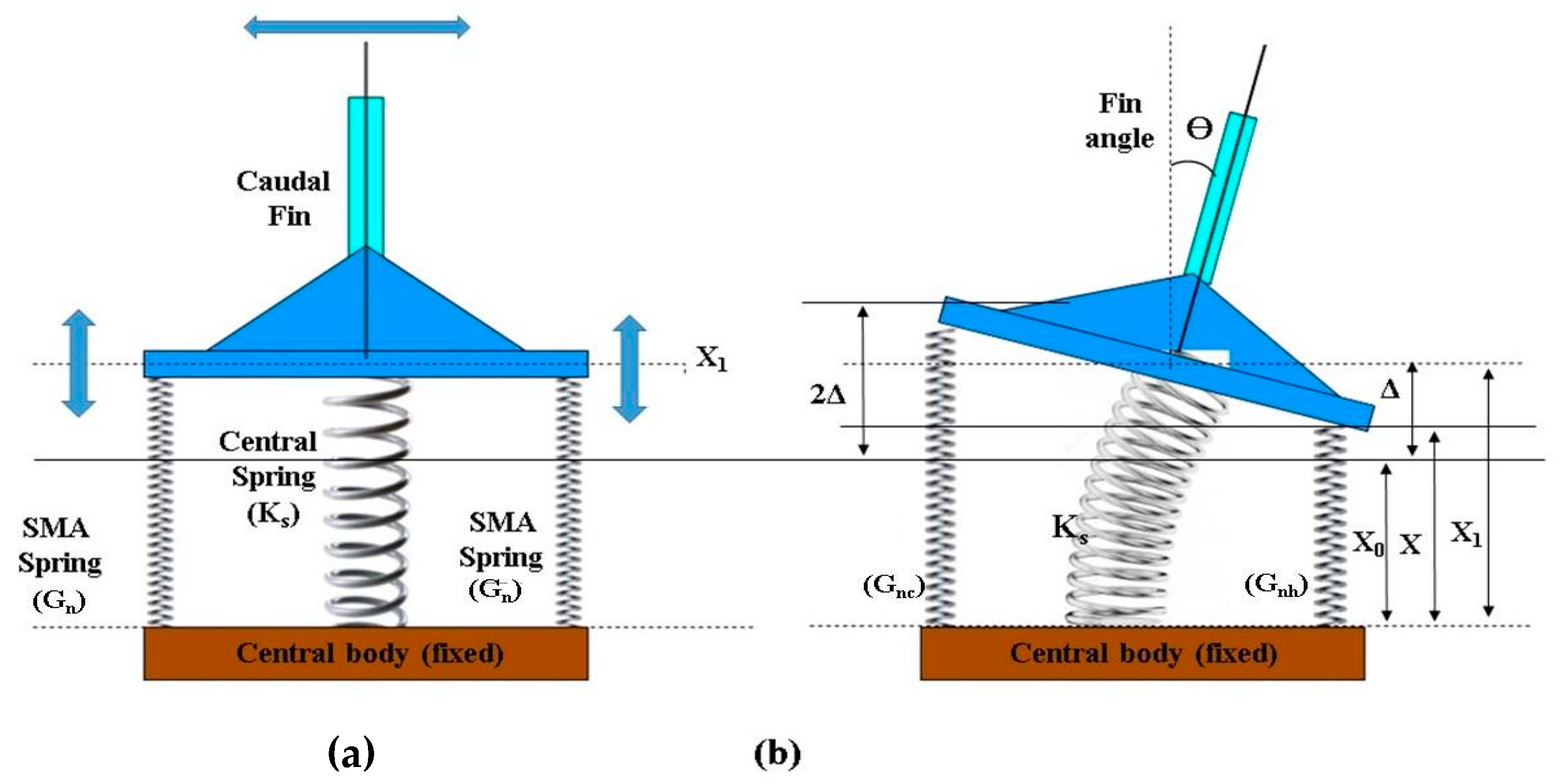
2.4. Mathematical Modelling and Characterization
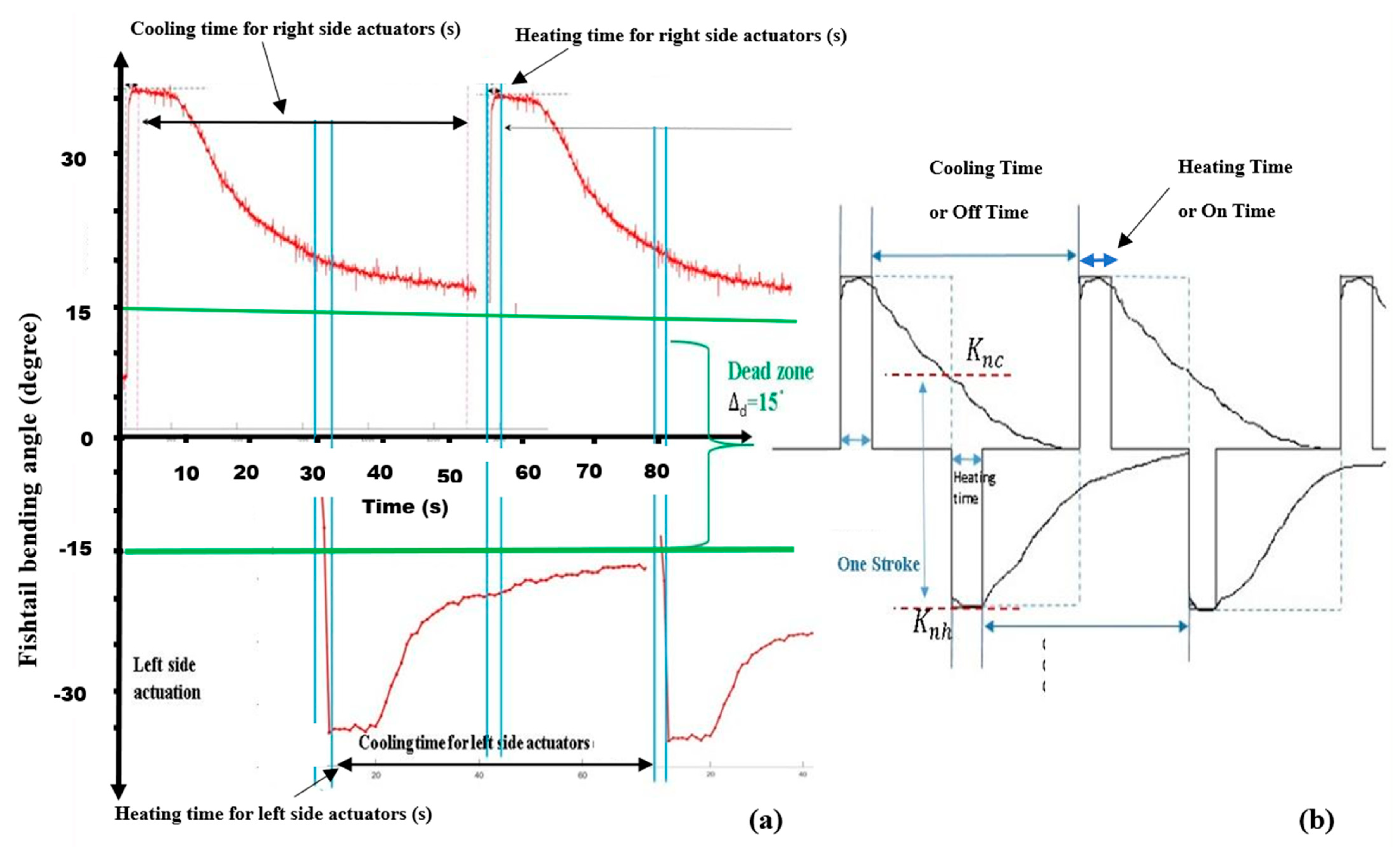
2.4.1. Technique to Enhance the Cyclic Frequency
2.4.2. Forward Thrust Developed Due to Drag Force
3. Results
3.1. Calculation of Cyclic Frequency for a Given Signal
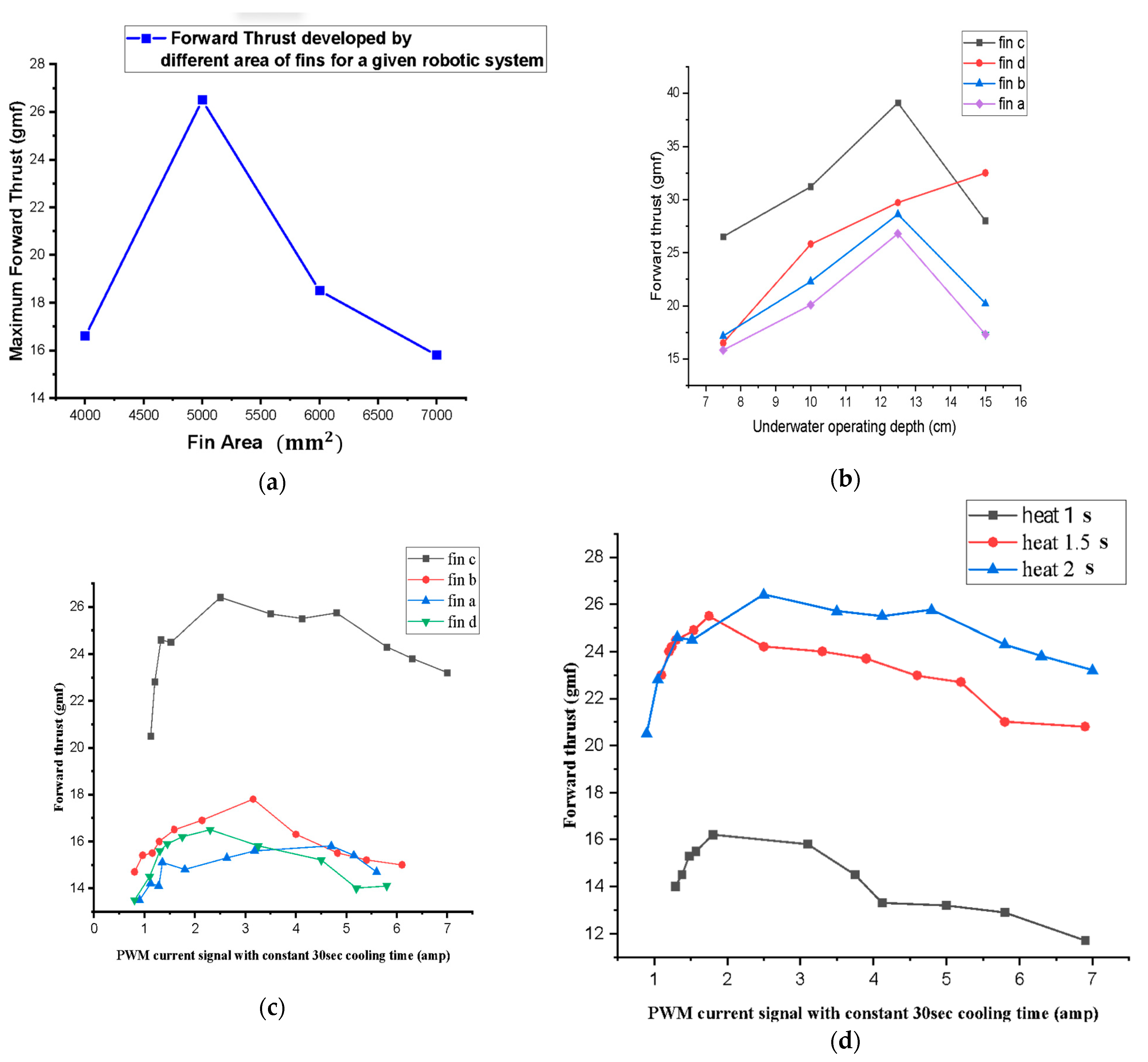
3.2. Fin Design and Test to Achieve Maximum Forward Thrust
4. Conclusions and Future Scope
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Youssef, S.M.; Soliman, M.; Saleh, M.A.; Mousa, M.A.; Elsamanty, M.; Radwan, A.G. Underwater Soft Robotics: A Review of Bioinspiration in Design, Actuation, Modeling, and Control. Micromachines 2022, 13, 110. [Google Scholar] [CrossRef] [PubMed]
- Le, C.H.; Nguyen, Q.S.; Park, H.C. Design and demonstration of a fish robot actuated by a SMA-driven actuation system. In Active and Passive Smart Structures and Integrated Systems 2010, Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 7–11 March 2010; SPIE: Bellingham, WA, USA, 2010; p. 76431R. [Google Scholar] [CrossRef]
- Koiri, M.; Sharma, A. Characterization and Behavior Study of Nitinol Shape Memory Alloy Wire for Effective and Efficient Use in Soft Robotics as an Actuator. Indian J. Pure Appl. Phys. 2021, 59, 216–222. Available online: http://nopr.niscair.res.in/handle/123456789/56510 (accessed on 30 July 2021).
- Rodrigue, H.; Wang, W.; Han, M.W.; Quan, Y.J.; Ahn, S.H. Comparison of mold designs for SMA-based twisting soft actuator. Sens. Actuators A Phys. 2016, 237, 96–106. [Google Scholar] [CrossRef]
- Bodaghi, M.; Shakeri, M.; Aghdam, M.M. Thermo-Mechanical Behavior of Shape Adaptive Composite Plates with Surface-Bonded Shape Memory Alloy Ribbons. Compos. Struct. 2014, 119, 115–133. [Google Scholar] [CrossRef]
- Bodaghi, M.; Damanpack, A.R.; Aghdam, M.M.; Shakeri, M. Materials Science & Engineering A A phenomenological SMA model for combined axial—Torsional proportional/non-proportional loading conditions. Mater. Sci. Eng. A 2013, 587, 12–26. [Google Scholar] [CrossRef]
- Shintake, J.; Rosset, S.; Schubert, B.; Mintchev, S.; Floreano, D.; Shea, H. DEA for soft robotics: 1-gram actuator picks up a 60-gram egg. In Electroactive Polymer Actuators and Devices (EAPAD) 2015, Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring Conference, San Diego, CA, USA, 8–12 March 2015; SPIE: Bellingham, WA, USA, 2015. [Google Scholar] [CrossRef]
- Shintake, J.; Shea, H.; Floreano, D. Biomimetic underwater robots based on dielectric elastomer actuators. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 4957–4962. [Google Scholar] [CrossRef]
- Chen, Z.; Shatara, S.; Tan, X. Modeling of biomimetic robotic fish propelled by an ionic polymermetal composite caudal fin. IEEE/ASME Trans. Mechatron. 2010, 15, 448–459. [Google Scholar] [CrossRef]
- Hubbard, J.J.; Fleming, M.; Palmre, V.; Pugal, D.; Kim, K.J.; Leang, K.K. Monolithic IPMC fins for propulsion and maneuvering in bioinspired underwater robotics. IEEE J. Ocean. Eng. 2014, 39, 540–551. [Google Scholar] [CrossRef]
- Wang, Z.; Hang, G.; Wang, Y.; Li, J.; Du, W. Embedded SMA wire actuated biomimetic fin: A module for biomimetic underwater propulsion. Smart Mater. Struct. 2008, 17, 025039. [Google Scholar] [CrossRef]
- Muralidharan, M.; Palani, I.A. Development of subcarangiform bionic robotic fish propelled by shape memory alloy actuators. Def. Sci. J. 2021, 71, 94–101. [Google Scholar] [CrossRef]
- Kim, B.; Lee, S.; Park, J.H.; Park, J.O. Design and fabrication of a locomotive mechanism for capsule-type endoscopes using shape memory alloys (SMAs). IEEE/ASME Trans. Mechatron. 2005, 10, 77–86. [Google Scholar] [CrossRef]
- Dovica, M.; Kelemenová, T.; Kelemen, M. Measurement of the SMA actuator properties. In Mechatronics Recent Technological and Scientific Advances, Proceedings of the 9th International Conference Mechatronics, Warsaw, Poland, 21–24 September 2011; Springer: Berlin/Heidelberg, Germany, 2012; pp. 187–195. [Google Scholar] [CrossRef]
- Sekhar, P.K.; Uwizeye, V. Review of Sensor and Actuator Mechanisms for bioMEMS. In MEMS for Biomedical Applications; Woodhead Publishing Limited: Sawston, UK, 2012. [Google Scholar] [CrossRef]
- Shaw, H.; Thakur, A. Shape memory alloy based caudal fin for a robotic fish: Design, fabrication, control and characterization. In Proceedings of the 2019 4th International Conference on Advances in Robotics, Chennai, India, 2–6 July 2019. [Google Scholar] [CrossRef]
- Zhang, Y.H.; He, J.H.; Low, K. Design and motion testing of a Multiple SMA fin driven BIUV. J. Hydrodyn. 2019, 31, 124–136. [Google Scholar] [CrossRef]
- Wang, Z.; Hang, G.; Li, J.; Wang, Y.; Xiao, K. A micro-robot fish with embedded SMA wire actuated flexible biomimetic fin. Sens. Actuators A Phys. 2008, 144, 354–360. [Google Scholar] [CrossRef]
- Coral, W.; Rossi, C.; Curet, O.M.; Castro, D. Design and assessment of a flexible fish robot actuated by shape memory alloys. Bioinspir. Biomim. 2018, 13, 056009. [Google Scholar] [CrossRef]
- Rossi, C.; Coral, W.; Colorado, J.; Barrientos, A. A motor-less and gear-less bio-mimetic robotic fish design. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3646–3651. [Google Scholar] [CrossRef]
- Phamduy, P.; Vazquez, M.A.; Kim, C.; Mwaffo, V.; Rizzo, A.; Porfiri, M. Design and characterization of a miniature free-swimming robotic fish based on multi-material 3D printing. Int. J. Intell. Robot. Appl. 2017, 1, 209–223. [Google Scholar] [CrossRef]
- Zhong, Y.; Li, Z.; Du, R. A Novel Robot Fish with Wire-Driven Active Body and Compliant Tail. IEEE/ASME Trans. Mechatronics 2017, 22, 1633–1643. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef]
- Berlinger, F.; Duduta, M.; Gloria, H.; Clarke, D.; Nagpal, R.; Wood, R. A Modular Dielectric Elastomer Actuator to Drive Miniature Autonomous Underwater Vehicles. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 3429–3435. [Google Scholar] [CrossRef]
- Le, C.H.; Nguyen, Q.S.; Park, H.C. A SMA-based actuation system for a fish robot. Smart Struct. Syst. 2012, 10, 501–515. [Google Scholar] [CrossRef]
- Mirzaeifar, R.; Desroches, R.; Yavari, A. A combined analytical, numerical, and experimental study of shape-memory-alloy helical springs. Int. J. Solids Struct. 2011, 48, 611–624. [Google Scholar] [CrossRef]
- Raj, A.; Thakur, A. Fish-inspired robots: Design, sensing, actuation, and autonomy—A review of research. Bioinspiration Biomim. 2016, 11, 031001. [Google Scholar] [CrossRef]
- What is PLA? (Everything You Need to Know)—TWI. Available online: https://www.twi-global.com/technical-knowledge/faqs/what-is-pla (accessed on 17 January 2022).
- Koiri, M.K.; Kumar, H.; Arora, P.K.; Sharma, A.K. Design and optimization of Caudal fin for robotic fish driven by crank- slotted slider and lever mechanism. J. Eng. Res. 2022, 1–15. [Google Scholar] [CrossRef]
- Shahin, A.R.; Meckl, P.H.; Jones, J.D.; Thrasher, M.A. Enhanced Cooling of Shape Memory Alloy Wires Using Semiconductor Heat Pump Modules. J. Intell. Mater. Syst. Struct. 1994, 5, 95–104. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Different Parameters | Specifications of SMA Actuators |
|---|---|
| SMA wire diameter | 0.5 mm |
| Mean diameter of actuators | 3.5 mm |
| Number of effective coils | 10 |
| The contracted length of the actuator | 10 mm |
| Normal length | 50 mm |
| Extension of actuator | 60 mm |
| Total length of wire | 110 mm |
| Name of Different Parts | Specifications of the Parts of Robotic Fish |
|---|---|
| Weight of the flexible tail | 170 gm |
| Length | 140 mm |
| Material used | PLA (tail body), EVA (peduncle), and PP (origami skin) |
| The maximum length of the axis of an elliptical cross-sectional plate | 90 mm × 80 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koiri, M.K.; Dubey, V.; Sharma, A.K.; Chuchala, D. Design of a Shape-Memory-Alloy-Based Carangiform Robotic Fishtail with Improved Forward Thrust. Sensors 2024, 24, 544. https://doi.org/10.3390/s24020544
Koiri MK, Dubey V, Sharma AK, Chuchala D. Design of a Shape-Memory-Alloy-Based Carangiform Robotic Fishtail with Improved Forward Thrust. Sensors. 2024; 24(2):544. https://doi.org/10.3390/s24020544
Chicago/Turabian StyleKoiri, Mithilesh Kumar, Vineet Dubey, Anuj Kumar Sharma, and Daniel Chuchala. 2024. "Design of a Shape-Memory-Alloy-Based Carangiform Robotic Fishtail with Improved Forward Thrust" Sensors 24, no. 2: 544. https://doi.org/10.3390/s24020544
APA StyleKoiri, M. K., Dubey, V., Sharma, A. K., & Chuchala, D. (2024). Design of a Shape-Memory-Alloy-Based Carangiform Robotic Fishtail with Improved Forward Thrust. Sensors, 24(2), 544. https://doi.org/10.3390/s24020544