
Anomaly Detection Method for Rocket Engines Based on Convex Optimized Information Fusion



Abstract
1. Introduction
2. Preliminary
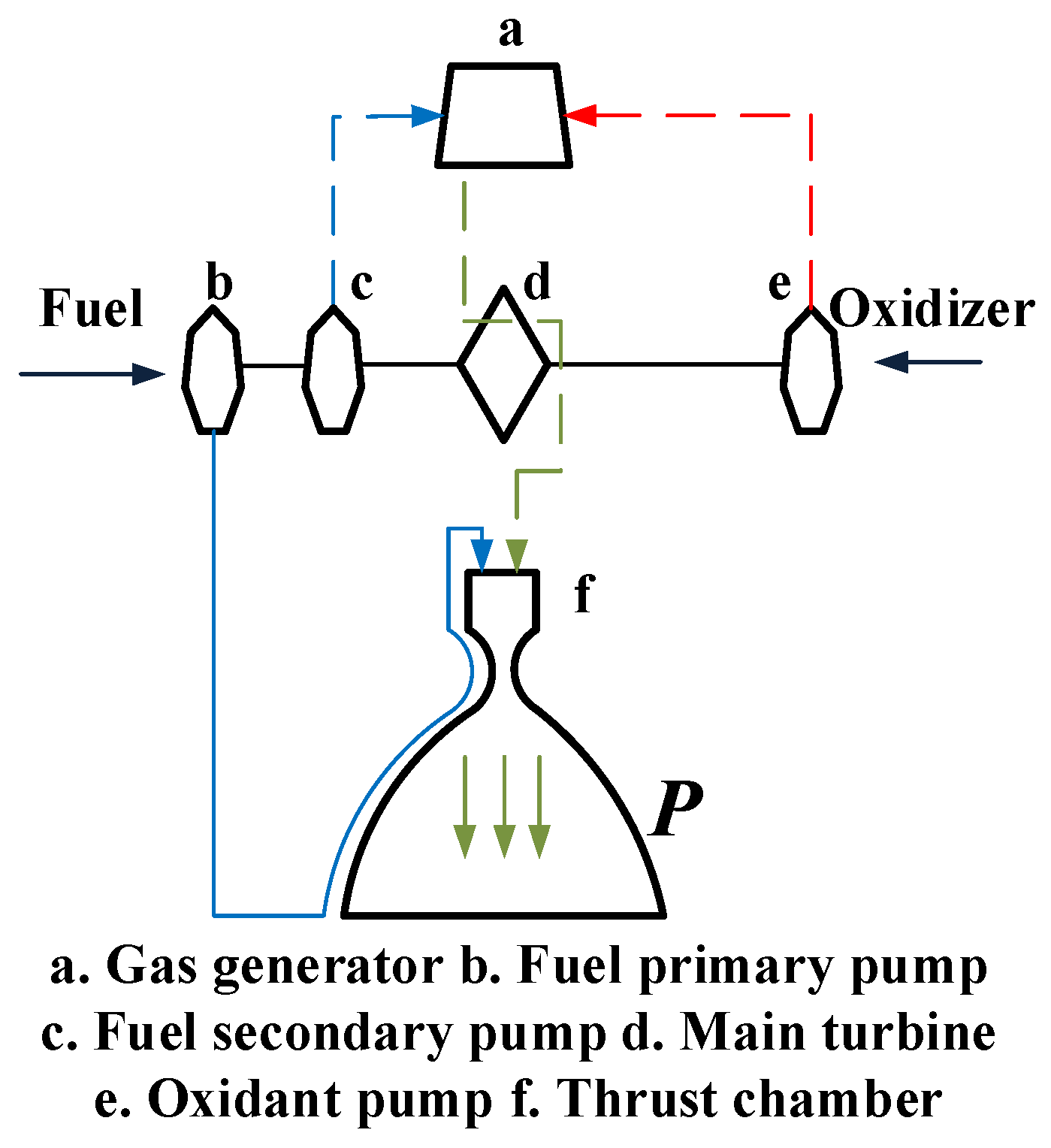
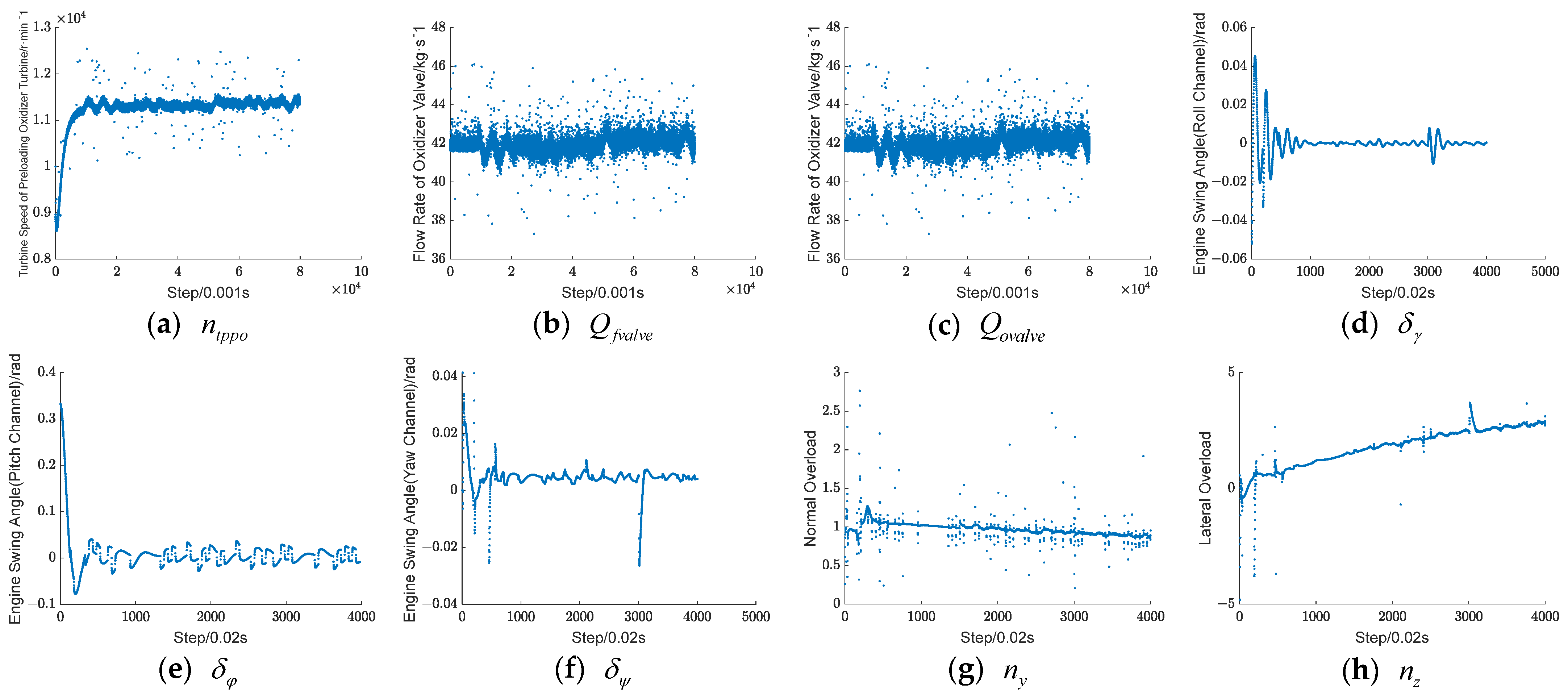
2.1. Research Population
2.2. Existing Problems
3. Method
3.1. Convex Optimization Problem Construction
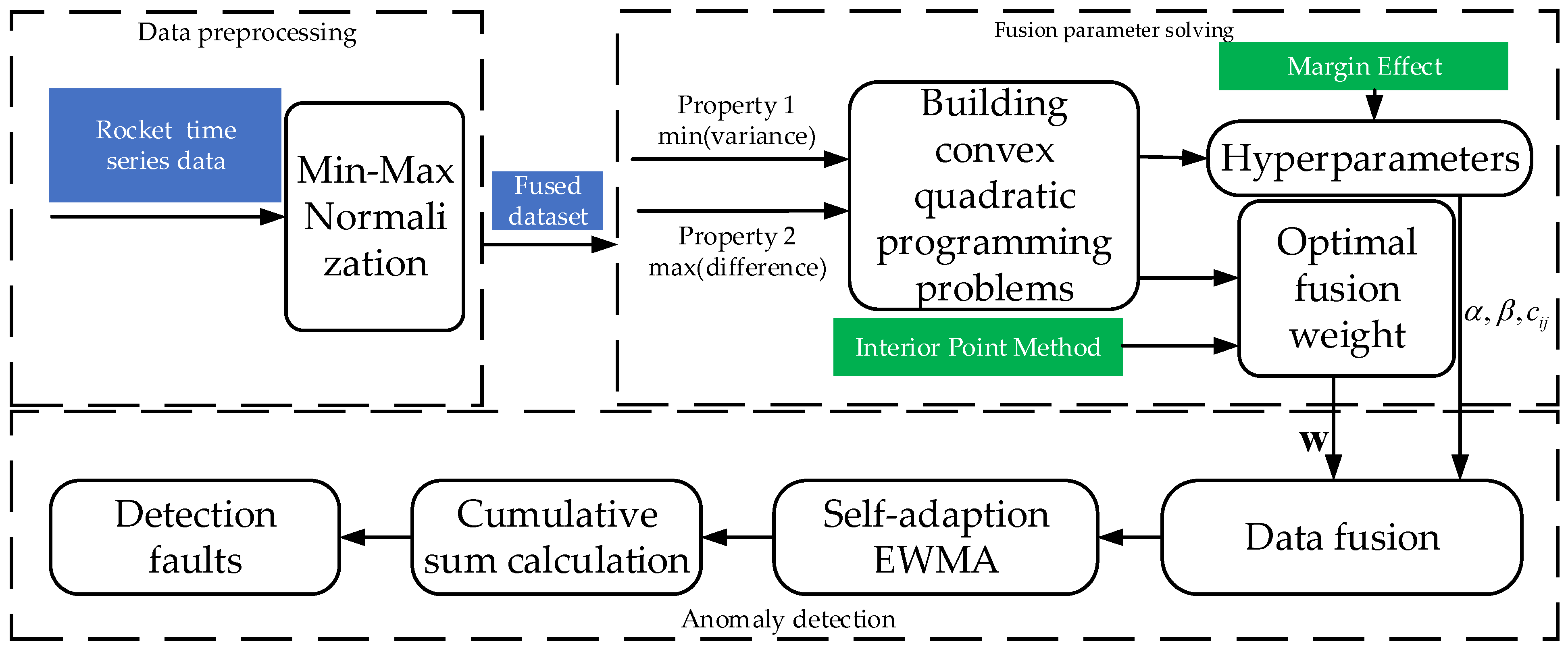
3.2. Algorithm Design
3.2.1. Data Preprocessing
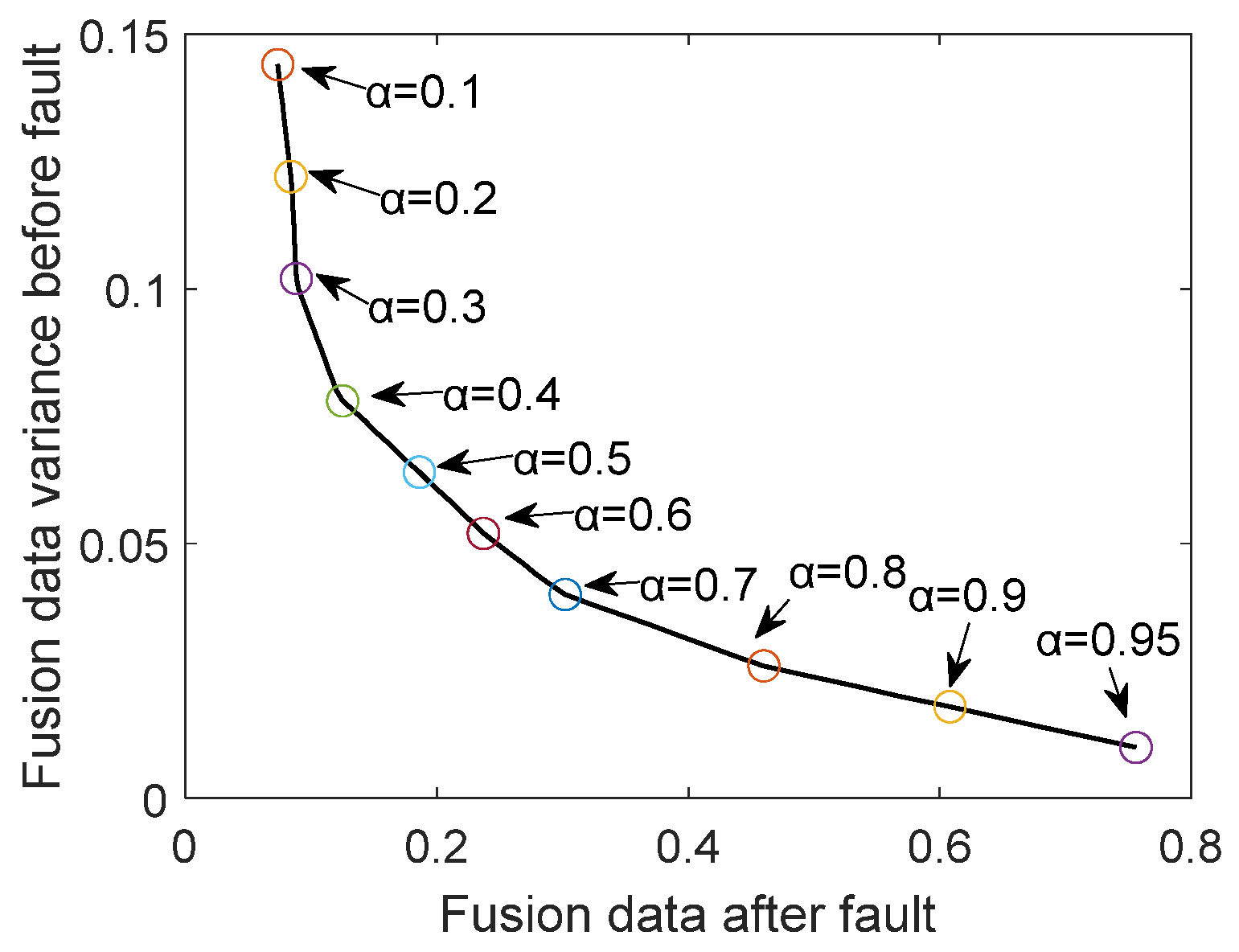
3.2.2. Fusion Parameter Solving
3.2.3. Anomaly Detection
- If , raise the lower limit, i.e., ;
- If , lower the upper limit, i.e., ;
- If , jump out of the loop and find the desired control limit h; otherwise, reset the control limit h, i.e., .
4. Experiment
4.1. Experiment Design
4.2. Experiment Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, C.; Zhang, Y.; Zhao, Z.; Chen, X.; Hu, J. Dynamic Model-Assisted transferable network for Liquid Rocket Engine Fault Diagnosis using limited fault samples. Reliab. Eng. Syst. Saf. 2023, 243, 109837. [Google Scholar] [CrossRef]
- Huang, P.; Yu, H.; Wang, T. A Study Using Optimized LSSVR for Real-Time Fault Detection of Liquid Rocket Engine. Processe 2022, 10, 1643. [Google Scholar] [CrossRef]
- Park, S.Y.; Ahn, J. Deep neural network approach for fault detection and diagnosis during startup transient of liquid-propellant rocket engine. Acta Astronaut. 2020, 177, 714–730. [Google Scholar] [CrossRef]
- Lv, H.; Chen, J.; Wang, J.; Yuan, J.; Liu, Z. A supervised framework for recognition of liquid rocket engine health state under steady-state process without fault samples. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Oreilly, D. System for Anomaly and Failure Detection (SAFD) System Development (No. NAS 1.26: 193907); NASA: Washington, DC, USA, 1993. [Google Scholar]
- Biggs, R. A probabilistic risk assessment for the space shuttle main engine with a turbomachinery vibration monitor cutoff system. In Proceedings of the 26th Joint Propulsion Conference, Orlando, FL, USA, 16–18 July 1990. [Google Scholar]
- Wheeler, K.; Dhawan, A.; Meyer, C. SSME sensor modeling using radial basis function neural networks. In Proceedings of the 30th Joint Propulsion Conference and Exhibit, Indianapolis, IN, USA, 27–29 June 1994. [Google Scholar]
- Yu, H.; Wang, T. A method for real-time fault detection of liquid rocket engine based on adaptive genetic algorithm optimizing back propagation neural network. Sensors 2021, 21, 5026. [Google Scholar] [CrossRef] [PubMed]
- Tsutsumi, S.; Hirabayashi, M.; Sato, D.; Kawatsu, K.; Sato, M.; Kimura, T.; Hashimoto, T.; Abe, M. Data-driven fault detection in a reusable rocket engine using bivariate time-series analysis. Acta Astronaut. 2021, 179, 685–694. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Chen, J.; Liu, Z.; Feng, Y. Retentive multimodal scale-variable anomaly detection framework with limited data groups for liquid rocket engine. Measurement 2022, 205, 112171. [Google Scholar] [CrossRef]
- Yan, H.; Liu, Z.; Chen, J.; Feng, Y.; Wang, J. Memory-augmented skip-connected autoencoder for unsupervised anomaly detection of rocket engines with multi-source fusion. ISA Trans. 2023, 133, 53–65. [Google Scholar] [CrossRef]
- Azamfar, M.; Singh, J.; Bravo-Imaz, I.; Lee, J. Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis. Mech. Syst. Signal Process. 2020, 144, 106861. [Google Scholar] [CrossRef]
- Jiang, W.; Xie, C.; Zhuang, M.; Shou, Y.; Tang, Y. Sensor data fusion with z-numbers and its application in fault diagnosis. Sensors 2016, 16, 1509. [Google Scholar] [CrossRef]
- Liu, K.; Gebraeel, N.Z.; Shi, J. A data-level fusion model for developing composite health indices for degradation modeling and prognostic analysis. IEEE Trans. Autom. Sci. Eng. 2013, 10, 652–664. [Google Scholar] [CrossRef]
- Buchaiah, S.; Shakya, P. Bearing fault diagnosis and prognosis using data fusion based feature extraction and feature selection. Measurement 2022, 188, 110506. [Google Scholar] [CrossRef]
- Jing, L.; Wang, T.; Zhao, M.; Wang, P. An Adaptive Multi-Sensor Data Fusion Method Based on Deep Convolutional Neural Networks for Fault Diagnosis of Planetary Gearbox. Sensors 2017, 17, 414. [Google Scholar] [CrossRef] [PubMed]
- Radman, M.; Moradi, M.; Chaibakhsh, A.; Kordestani, M.; Saif, M. Multi-feature fusion approach for epileptic seizure detection from EEG signals. IEEE Sens. J. 2020, 21, 3533–3543. [Google Scholar] [CrossRef]
- Xu, W.; Jing, L.; Tan, J.; Dou, L. A multimodel decision fusion method based on DCNN-IDST for fault diagnosis of rolling bearing. Shock Vib. 2020, 2020, 8856818. [Google Scholar] [CrossRef]
- Chao, Q.; Gao, H.; Tao, J.; Wang, Y.; Zhou, J.; Liu, C. Adaptive decision-level fusion strategy for the fault diagnosis of axial piston pumps using multiple channels of vibration signals. Sci. China Technol. Sci. 2022, 65, 470–480. [Google Scholar] [CrossRef]
- Grbovic, M.; Li, W.; Xu, P.; Usadi, A.K.; Song, L.; Vucetic, S. Decentralized fault detection and diagnosis via sparse PCA based decomposition and maximum entropy decision fusion. J. Process Control 2012, 22, 738–750. [Google Scholar] [CrossRef]
- Tran, M.Q.; Liu, M.K.; Elsisi, M. Effective multi-sensor data fusion for chatter detection in milling process. ISA Trans. 2022, 125, 514–527. [Google Scholar] [CrossRef]
- Li, J.; Hong, D.; Gao, L.; Yao, J.; Zheng, K.; Zhang, B.; Chanussot, J. Deep learning in multimodal remote sensing data fusion: A comprehensive review. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102926. [Google Scholar] [CrossRef]
- Wei, Y.; Wu, D.; Terpenny, J. Robust incipient fault detection of complex systems using data fusion. IEEE Trans. Instrum. Meas. 2020, 69, 9526–9534. [Google Scholar] [CrossRef]
- Pérez-Roca, S.; Marzat, J.; Piet-Lahanier, H.; Langlois, N.; Farago, F.; Galeotta, M.; Le Gonidec, S. A survey of automatic control methods for liquid-propellant rocket engines. Prog. Aerosp. Sci. 2019, 107, 63–84. [Google Scholar] [CrossRef]
- Wang, J.; Cui, N.; Wei, C. Optimal rocket landing guidance using convex optimization and model predictive control. J. Guid. Control Dyn. 2019, 42, 1078–1092. [Google Scholar] [CrossRef]
- Sugimachi, T.; Yonemoto, K.; Fujikawa, T. Attitude Control Law Design of Experimental Winged Rocket Using Engine Gimbal Control. In Proceedings of the 2018 Asia-Pacific International Symposium on Aerospace Technology (APISAT 2018), Singapore, 8 June 2019; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Liu, X.; Lu, P.; Pan, B. Survey of convex optimization for aerospace applications. Astrodynamics 2017, 1, 23–40. [Google Scholar] [CrossRef]
- Benedikter, B.; Zavoli, A.; Colasurdo, G.; Pizzurro, S.; Cavallini, E. Convex approach to three-dimensional launch vehicle ascent trajectory optimization. J. Guid. Control Dyn. 2021, 44, 1116–1131. [Google Scholar] [CrossRef]
- Deaconu, G.; Louembet, C.; Théron, A. Designing continuously constrained spacecraft relative trajectories for proximity operations. J. Guid. Control Dyn. 2015, 38, 1208–1217. [Google Scholar] [CrossRef]
- Harris, M.W.; Açıkmeşe, B. Maximum divert for planetary landing using convex optimization. J. Optim. Theory Appl. 2014, 162, 975–995. [Google Scholar] [CrossRef]
- Dong, X.; Fan, Q.; Li, D. Detrending moving-average cross-correlation based principal component analysis of air pollutant time series. Chaos Solitons Fractals 2023, 172, 113558. [Google Scholar] [CrossRef]
- Berlo, B.V.; Verhoeven, R.; Meratnia, N. Use of Domain Labels during Pre-Training for Domain-Independent WiFi-CSI Gesture Recognition. Sensors 2023, 23, 9233. [Google Scholar] [CrossRef]
- Gorissen, B.L. Interior point methods can exploit structure of convex piecewise linear functions with application in radiation therapy. SIAM J. Optim. 2022, 32, 256–275. [Google Scholar] [CrossRef]
- Engmann, G.M.; Han, D. The optimized CUSUM and EWMA multi-charts for jointly detecting a range of mean and variance change. J. Appl. Stat. 2022, 49, 1540–1558. [Google Scholar] [CrossRef]
- Mohd, G.; Mohamad, H.; Wan, R. Vibration analysis for machine monitoring and diagnosis: A systematic review. Shock Vib. 2021, 2021, 9469318. [Google Scholar]
- Rezatofighi, H.; Nathan, T.; Jun Young, G.; Amir, S.; Ian, R.; Silvio, S. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Para | ||||
| Value | 0.1652 | 0.3044 | 0.0856 | 0.1723 |
| Para | ||||
| Value | 0.1245 | 0.0647 | 0.0018 | 0.0815 |
| Algorithm | Accuracy | MIOU | Detection Time |
|---|---|---|---|
| PSO-LSSVM | 92.9% | 86.7% | 1.88 s |
| CNN-LSTM | 94.3% | 89.0% | 2.03 s |
| Single-parameter CUSUM | 85.2% | 74.2% | 1.48 s |
| proposed | 98.7% | 97.4% | 1.12 s |
| Proposed (with 5% noise) | 98.6% | 97.1% | 1.15 s |
| Proposed (with 15% noise) | 95.5% | 91.3% | 1.14 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Cheng, Y.; Jiang, B.; Lu, F.; Wang, N. Anomaly Detection Method for Rocket Engines Based on Convex Optimized Information Fusion. Sensors 2024, 24, 415. https://doi.org/10.3390/s24020415
Sun H, Cheng Y, Jiang B, Lu F, Wang N. Anomaly Detection Method for Rocket Engines Based on Convex Optimized Information Fusion. Sensors. 2024; 24(2):415. https://doi.org/10.3390/s24020415
Chicago/Turabian StyleSun, Hao, Yuehua Cheng, Bin Jiang, Feng Lu, and Na Wang. 2024. "Anomaly Detection Method for Rocket Engines Based on Convex Optimized Information Fusion" Sensors 24, no. 2: 415. https://doi.org/10.3390/s24020415
APA StyleSun, H., Cheng, Y., Jiang, B., Lu, F., & Wang, N. (2024). Anomaly Detection Method for Rocket Engines Based on Convex Optimized Information Fusion. Sensors, 24(2), 415. https://doi.org/10.3390/s24020415