
Conceptualization of Cloud-Based Motion Analysis and Navigation for Wearable Robotic Applications


Abstract
1. Introduction
1.1. Motivation
1.2. Related Work
1.2.1. Human Activity Recognition
1.2.2. Map Construction
2. Materials and Methods
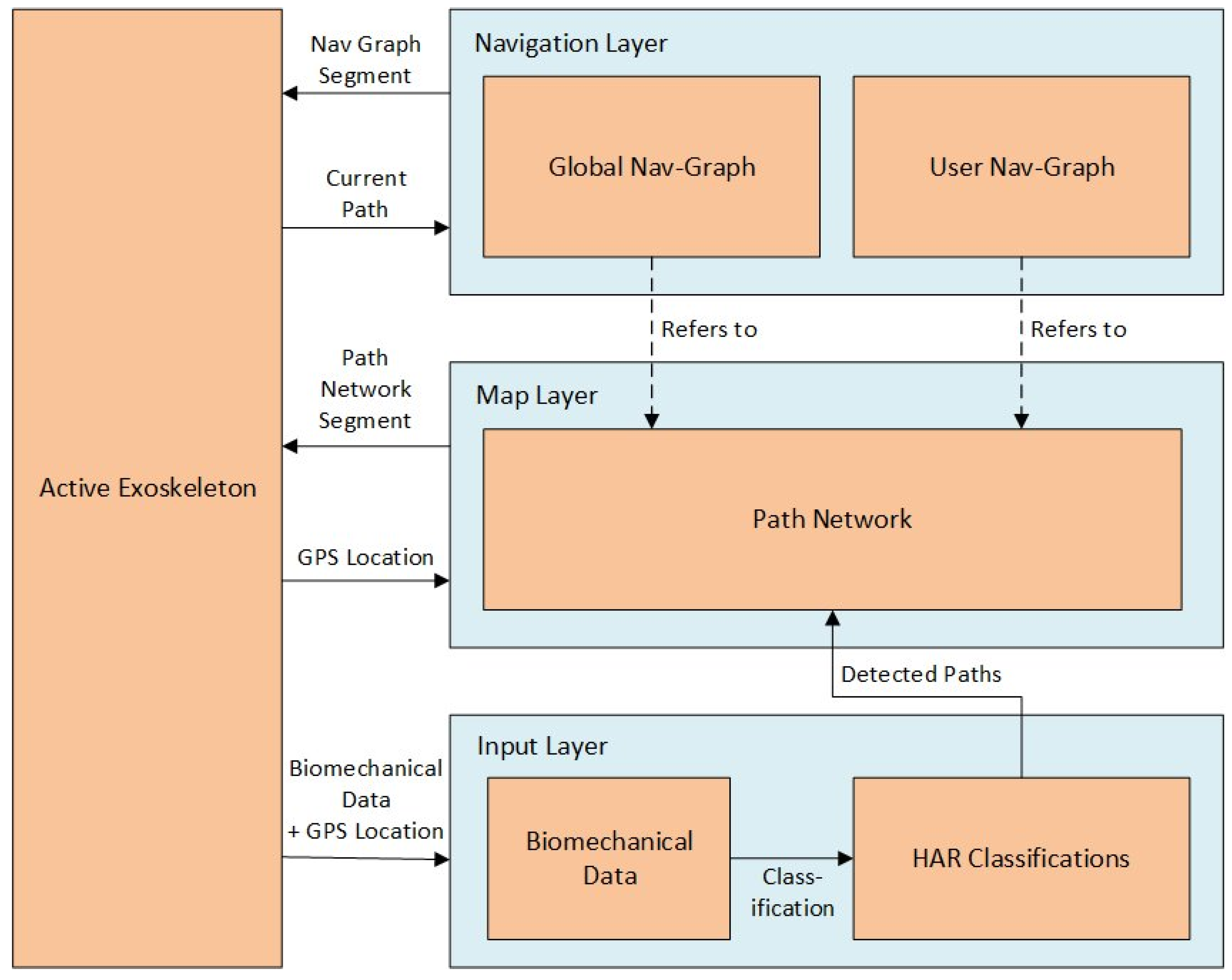
2.1. System Architecture
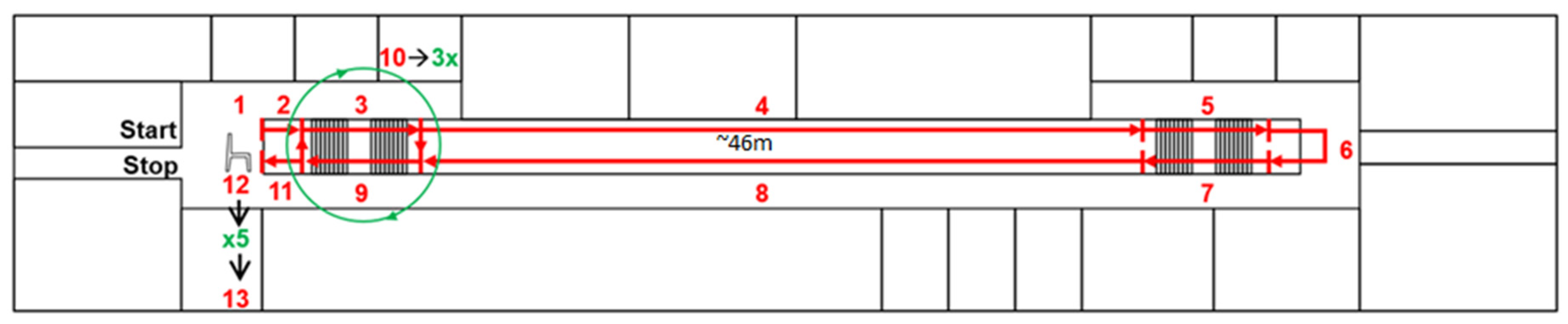
2.2. Human Activity Recognition
- Level walking;
- Stairs ascending;
- Stairs descending.
- Inclination of the shank and thigh in the sagittal plane;
- Angular velocities (X, Y, Z) of the shank and thigh;
- Acceleration (X, Y, Z) of the shank and thigh.
- Prominence: 0.2;
- Height: 1.6 radians;
- Distance: 16 samples.
- Minimum values of shank and thigh inclination;
- Maximum values of shank and thigh inclination;
- Mean values of shank and thigh inclination;
- Standard deviation of shank and thigh inclination;
- Range between minimum and maximum values of shank and thigh inclination.
2.3. Map Construction
2.3.1. Data Model
2.3.2. Path Operations
- Paths must be matched with other paths, to find points in which they start matching and stop matching. This operation is called ‘Path matching’.
- Paths must be split into multiple segments at arbitrary points, and between vertices. This operation is called ‘Path splitting’. When splitting paths, some of the properties must be recalculated. For example, if a path of type stair is split at its center, the ‘number of stairs’ property is divided by two.
- Paths can be simplified. This involves splitting the paths to remove loops and down sampling paths with an excessive density of vertices.
- Paths must be merged with matching paths to form an updated and potentially more accurate path. This operation is called ‘Path merging’. When merging two paths, a weighted average is applied to the geometry and the path properties. The weight of the average is proportional to the number of merges a path has made.
2.3.3. Map Construction Algorithm
3. Results
3.1. Human Activity Recognition
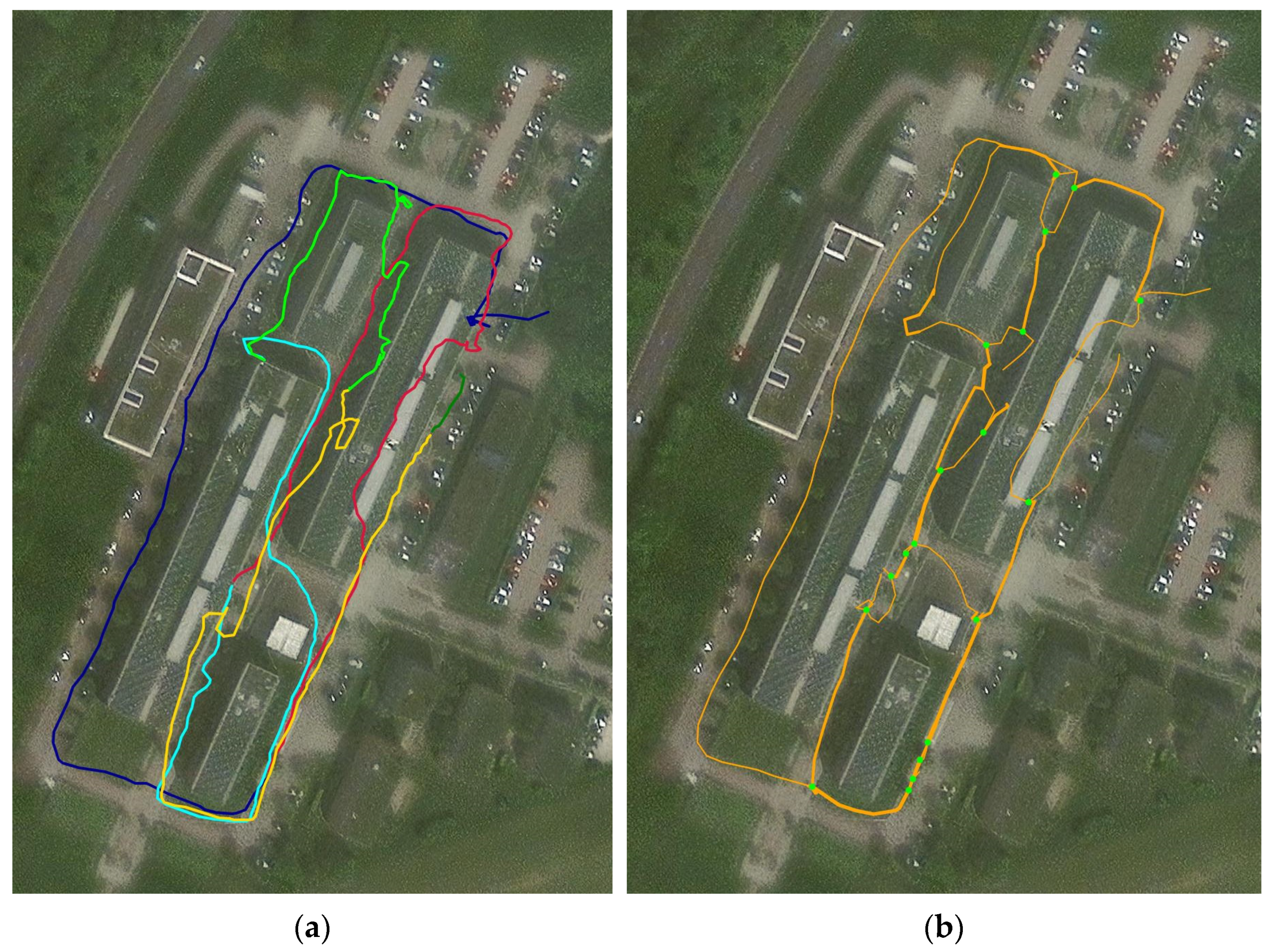
3.2. Map Construction
- The user does not walk the same way at the exact same location every time;
- Like all measurements, the recorded GPS location is subject to noise;
- Signal reflections from high buildings can lead to significant deviations.
4. Discussion and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rupp, M.; Lau, E.; Kurtz, S.M.; Alt, V. Projections of Primary TKA and THA in Germany from 2016 through 2040. Clin. Orthop. Relat. Res.® 2020, 478, 1622–1633. [Google Scholar] [CrossRef] [PubMed]
- Eissel, D.; Park, S.C.; Ogawa, N.; Kim, C.J.; Sirivunnabood, P.; Le, T.H. Economic Impacts of Demographic Transition: The Case of Germany. In Demographic Transition and Impacts in Asia and Europe; Asian Development Bank Institute: Tokyo, Japan, 2021. [Google Scholar]
- King, E.M.; Randolph, H.L.; Floro, M.S.; Suh, J. Demographic, health, and economic transitions and the future care burden. World Dev. 2021, 140, 105371. [Google Scholar] [CrossRef] [PubMed]
- Kitao, S.; Mikoshiba, M. Females, the elderly, and also males: Demographic aging and macroeconomy in Japan. J. Jpn. Int. Econ. 2020, 56, 101064. [Google Scholar] [CrossRef]
- Baud, R.; Manzoori, A.R.; Ijspeert, A.; Bouri, M. Review of control strategies for lower-limb exoskeletons to assist gait. J. NeuroEngineering Rehabil. 2021, 18, 119. [Google Scholar] [CrossRef]
- Louie, D.R.; Eng, J.J. Powered robotic exoskeletons in post-stroke rehabilitation of gait: A scoping review. J. NeuroEngineering Rehabil. 2016, 13, 53. [Google Scholar] [CrossRef] [PubMed]
- Pamungkas, D.S.; Caesarendra, W.; Soebakti, H.; Analia, R.; Susanto, S. Overview: Types of Lower Limb Exoskeletons. Electronics 2019, 8, 1283. [Google Scholar] [CrossRef]
- Mineev, S.A. Multimodal control system of active lower limb exoskeleton with feedback. In Proceedings of the Scientific-Practical Conference “Research and Development-2016”, Cham, Switzerland, 14–15 December 2016; Anisimov, K.V., Dub, A.V., Kolpakov, S.K., Lisitsa, A.V., Petrov, A.N., Polukarov, V.P., Popel, O.S., Vinokurov, V.A., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 3–10, ISBN 978-3-319-62870-7. [Google Scholar]
- Tung, W.; McKinley, M.; Pillai, M.; Reid, J.; Kazerooni, H. Design of a Minimally Actuated Medical Exoskeleton With Mechanical Swing-Phase Gait Generation and Sit-Stand Assistance. Mech. Eng. 2014, 136, S18. [Google Scholar] [CrossRef]
- Bao, W.; Villarreal, D.; Chiao, J.-C. Vision-Based autonomous walking in a lower-limb powered exoskeleton. In Proceedings of the 2020 IEEE 20th International Conference on Bioinformatics and Bioengineering (BIBE), Cincinnati, OH, USA, 26–28 October 2020; pp. 830–834. [Google Scholar]
- Laschowski, B.; McNally, W.; Wong, A.; McPhee, J. Computer Vision and Deep Learning for Environment-Adaptive Control of Robotic Lower-Limb Exoskeletons. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Virtual, 1–5 November 2021; pp. 4631–4635. [Google Scholar]
- Zhu, L.; Wang, Z.; Ning, Z.; Zhang, Y.; Liu, Y.; Cao, W.; Wu, X.; Chen, C. A Novel Motion Intention Recognition Approach for Soft Exoskeleton via IMU. Electronics 2020, 9, 2176. [Google Scholar] [CrossRef]
- Wang, D.; Gu, X.; Yu, H. Sensors and algorithms for locomotion intention detection of lower limb exoskeletons. Med. Eng. Phys. 2023, 113, 103960. [Google Scholar] [CrossRef]
- Schick, J.; Glaser, M.; Kennel, R. Risk Assessment and Mitigation Strategies for Active Lower Limb Exoskeletons. In Proceedings of the 2020 Annual Reliability and Maintainability Symposium (RAMS), Palm Springs, CA, USA, 27–30 January 2020; pp. 1–7. [Google Scholar]
- David, J.P.; Schick, D.; Rapp, L.; Schick, J.; Glaser, M. SensAA—Design and Verification of a Cloud-Based Wearable Biomechanical Data Acquisition System. Sensors 2024, 24, 2405. [Google Scholar] [CrossRef] [PubMed]
- Lara, O.D.; Labrador, M.A. A Survey on Human Activity Recognition using Wearable Sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Jordao, A.; Nazare, A.C.; Sena, J. Human Activity Recognition Based on Wearable Sensor Data: A Standardization of the State-of-the-Art. arXiv 2018, arXiv:1806.05226. [Google Scholar] [CrossRef]
- Lee, S.-M.; Yoon, S.M.; Cho, H. Human activity recognition from accelerometer data using Convolutional Neural Network. In Proceedings of the 2017 IEEE International Conference on Big Data and Smart Computing (BigComp), Jeju, Republic of Korea, 13–16 February 2017; pp. 131–134. [Google Scholar]
- Zebin, T.; Scully, P.J.; Ozanyan, K.B. Human activity recognition with inertial sensors using a deep learning approach. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Panwar, M.; Ram Dyuthi, S.; Chandra Prakash, K.; Biswas, D.; Acharyya, A.; Maharatna, K.; Gautam, A.; Naik, G.R. CNN based approach for activity recognition using a wrist-worn accelerometer. In Proceedings of the 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jeju, Republic of Korea, 11–15 July 2017; pp. 2438–2441. [Google Scholar]
- Alsheikh, M.A.; Selim, A.; Niyato, D.; Doyle, L.; Lin, S.; Tan, H.-P. Deep activity recognition models with triaxial accelerometers. In Proceedings of the Workshops at the thirtieth AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016. [Google Scholar]
- Tao, S.; Goh, W.L.; Gao, Y. A Convolved Self-Attention Model for IMU-based Gait Detection and Human Activity Recognition. In Proceedings of the 2023 IEEE 5th International Conference on Artificial Intelligence Circuits and Systems (AICAS), Hangzhou, China, 11–13 June 2023; pp. 1–5. [Google Scholar]
- Mutegeki, R.; Han, D.S. A CNN-LSTM Approach to Human Activity Recognition. In Proceedings of the 2020 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Fukuoka, Japan, 19–21 February 2020; pp. 362–366. [Google Scholar]
- Khodabandelou, G.; Moon, H.; Amirat, Y.; Mohammed, S. A fuzzy convolutional attention-based GRU network for human activity recognition. Eng. Appl. Artif. Intell. 2023, 118, 105702. [Google Scholar] [CrossRef]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. A Public Domain Dataset for Human Activity Recognition using Smartphones. In Proceedings of the The European Symposium on Artificial Neural Networks, Bruges, Belgium, 24–26 April 2013. [Google Scholar]
- Maffini, G. Raster versus vector data encoding and handling: A commentary. Photogramm. Eng. Remote Sens. 1987, 53, 1397–1398. [Google Scholar]
- Netek, R.; Masopust, J.; Pavlicek, F.; Pechanec, V. Performance Testing on Vector vs. Raster Map Tiles—Comparative Study on Load Metrics. ISPRS Int. J. Geo-Inf. 2020, 9, 101. [Google Scholar] [CrossRef]
- Nomura, K.; Bowers, S. Raster/Vector Conversions. In Cloud-Based Remote Sensing with Google Earth Engine: Fundamentals and Applications; Cardille, J.A., Crowley, M.A., Saah, D., Clinton, N.E., Eds.; Springer International Publishing: Cham, Switzerland, 2024; pp. 437–461. ISBN 978-3-031-26588-4. [Google Scholar]
- Bruntrup, R.; Edelkamp, S.; Jabbar, S.; Scholz, B. Incremental map generation with GPS traces. In Proceedings of the 2005 IEEE Intelligent Transportation Systems, Vienna, Austria, 16 September 2005; pp. 574–579. [Google Scholar]
- Zhang, J.; Ling, S.; Wang, P.; Hu, X.; Liu, L. Method for Fast Map Construction Based on GPS Data and Compressed Grid Algorithm. Land 2021, 10, 1322. [Google Scholar] [CrossRef]
- Kasemsuppakorn, P.; Hassan; Karimi, A. A pedestrian network construction algorithm based on multiple GPS traces. Transp. Res. Part C Emerg. Technol. 2013, 26, 285–300. [Google Scholar] [CrossRef]
- Wiedemann, C. External evaluation of road networks. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2003, 34, 93–98. [Google Scholar]
- Diaz, E.M.; Gonzalez, A.L.M. Step detector and step length estimator for an inertial pocket navigation system. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Republic of Korea, 27–30 October 2014; pp. 105–110. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Support Vector Machine | Decision Tree | |||||
|---|---|---|---|---|---|---|
| Accuracy | Precision | F1-Score | Accuracy | Precision | F1-Score | |
| Leave-one-subject-out | ||||||
| mean | 0.98 | 0.97 | 0.97 | 0.99 | 0.96 | 0.96 |
| std | 0.05 | 0.08 | 0.09 | 0.03 | 0.10 | 0.11 |
| min | 0.83 | 0.68 | 0.63 | 0.85 | 0.67 | 0.63 |
| max | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 |
| Leave-one-trial-out | ||||||
| mean | 0.99 | 0.98 | 0.98 | 0.99 | 0.98 | 0.98 |
| std | 0.03 | 0.05 | 0.06 | 0.03 | 0.07 | 0.07 |
| min | 0.85 | 0.68 | 0.63 | 0.85 | 0.67 | 0.63 |
| max | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schick, D.; Schick, J.; David, J.P.; Neubauer, R.; Glaser, M. Conceptualization of Cloud-Based Motion Analysis and Navigation for Wearable Robotic Applications. Sensors 2024, 24, 4997. https://doi.org/10.3390/s24154997
Schick D, Schick J, David JP, Neubauer R, Glaser M. Conceptualization of Cloud-Based Motion Analysis and Navigation for Wearable Robotic Applications. Sensors. 2024; 24(15):4997. https://doi.org/10.3390/s24154997
Chicago/Turabian StyleSchick, David, Johannes Schick, Jonas Paul David, Robin Neubauer, and Markus Glaser. 2024. "Conceptualization of Cloud-Based Motion Analysis and Navigation for Wearable Robotic Applications" Sensors 24, no. 15: 4997. https://doi.org/10.3390/s24154997
APA StyleSchick, D., Schick, J., David, J. P., Neubauer, R., & Glaser, M. (2024). Conceptualization of Cloud-Based Motion Analysis and Navigation for Wearable Robotic Applications. Sensors, 24(15), 4997. https://doi.org/10.3390/s24154997