Fault-Tolerant Control Based on Current Space Vectors against Total Sensor Failures




Abstract
1. Introduction
2. Fault-Tolerant Control Strategy against the Sensor Faults
2.1. Mathematical Model of a Three-Phase Induction Motor
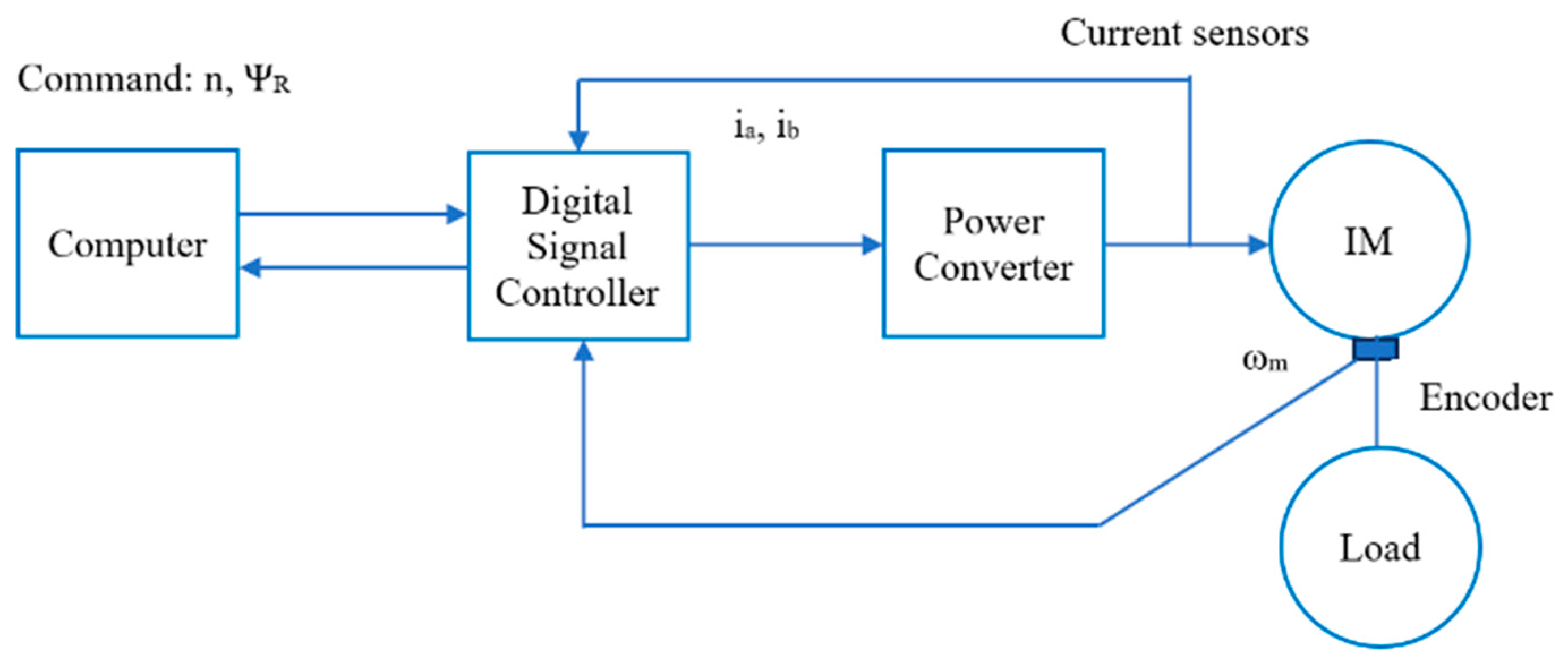
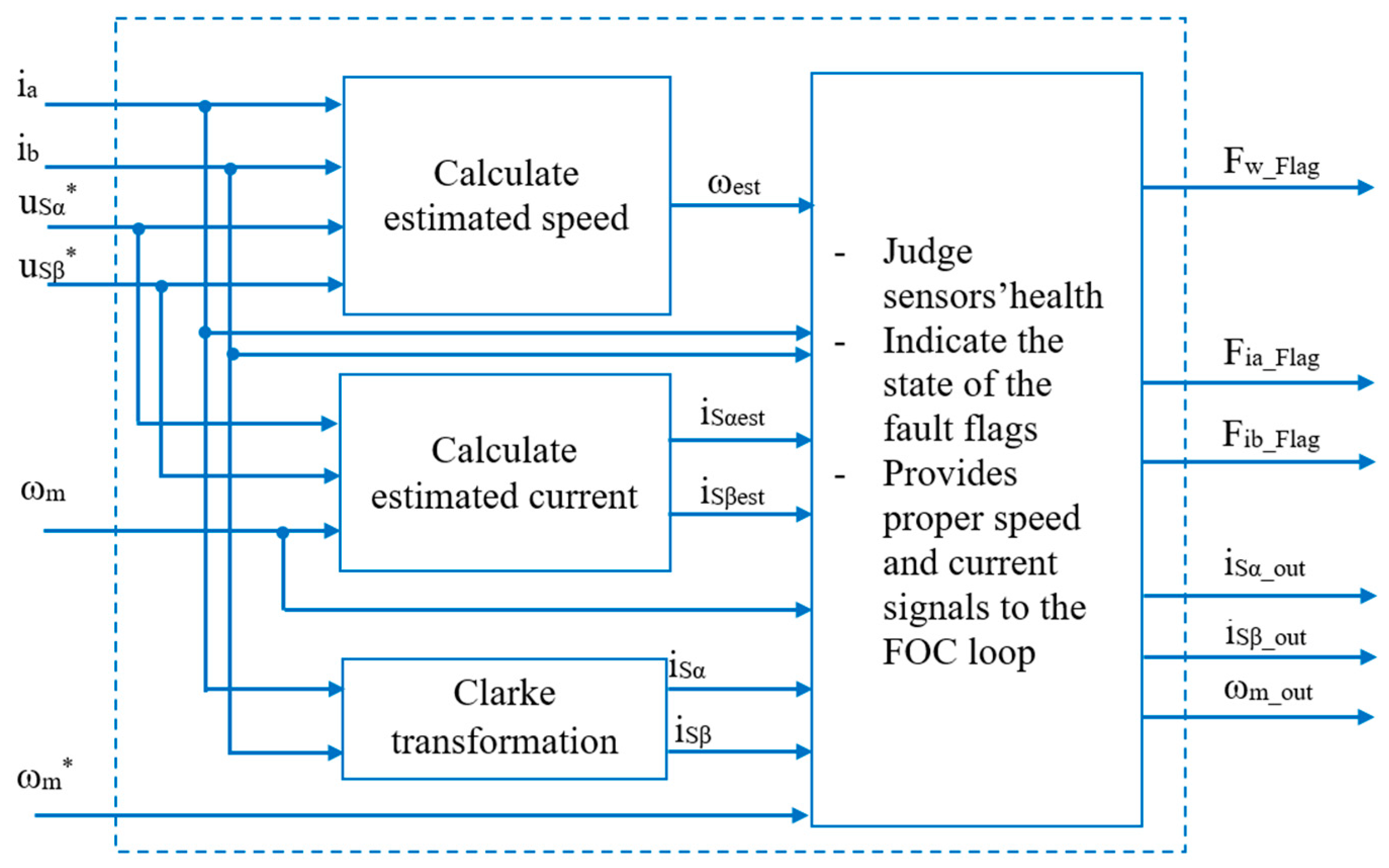
2.2. Fault-Tolerant Control
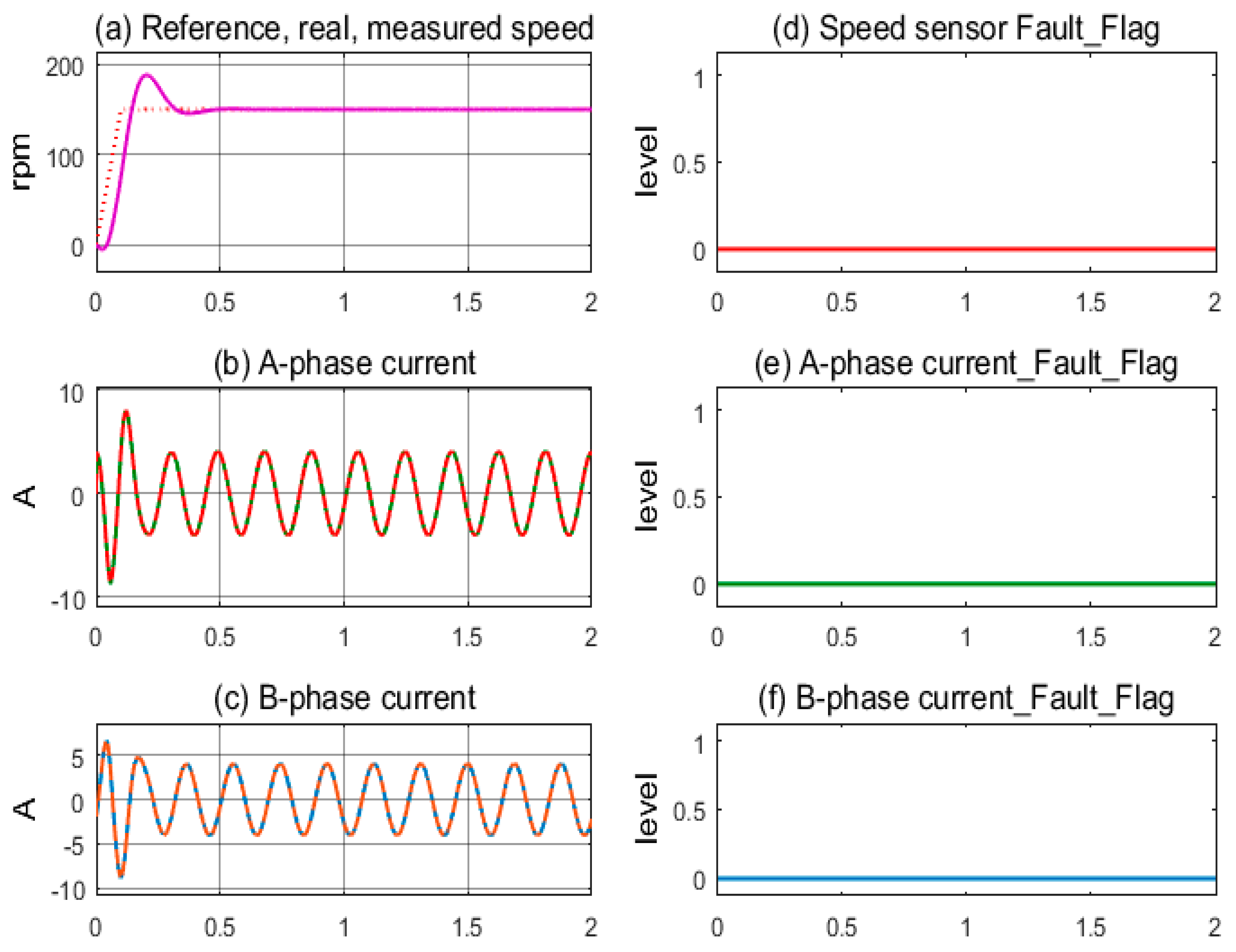
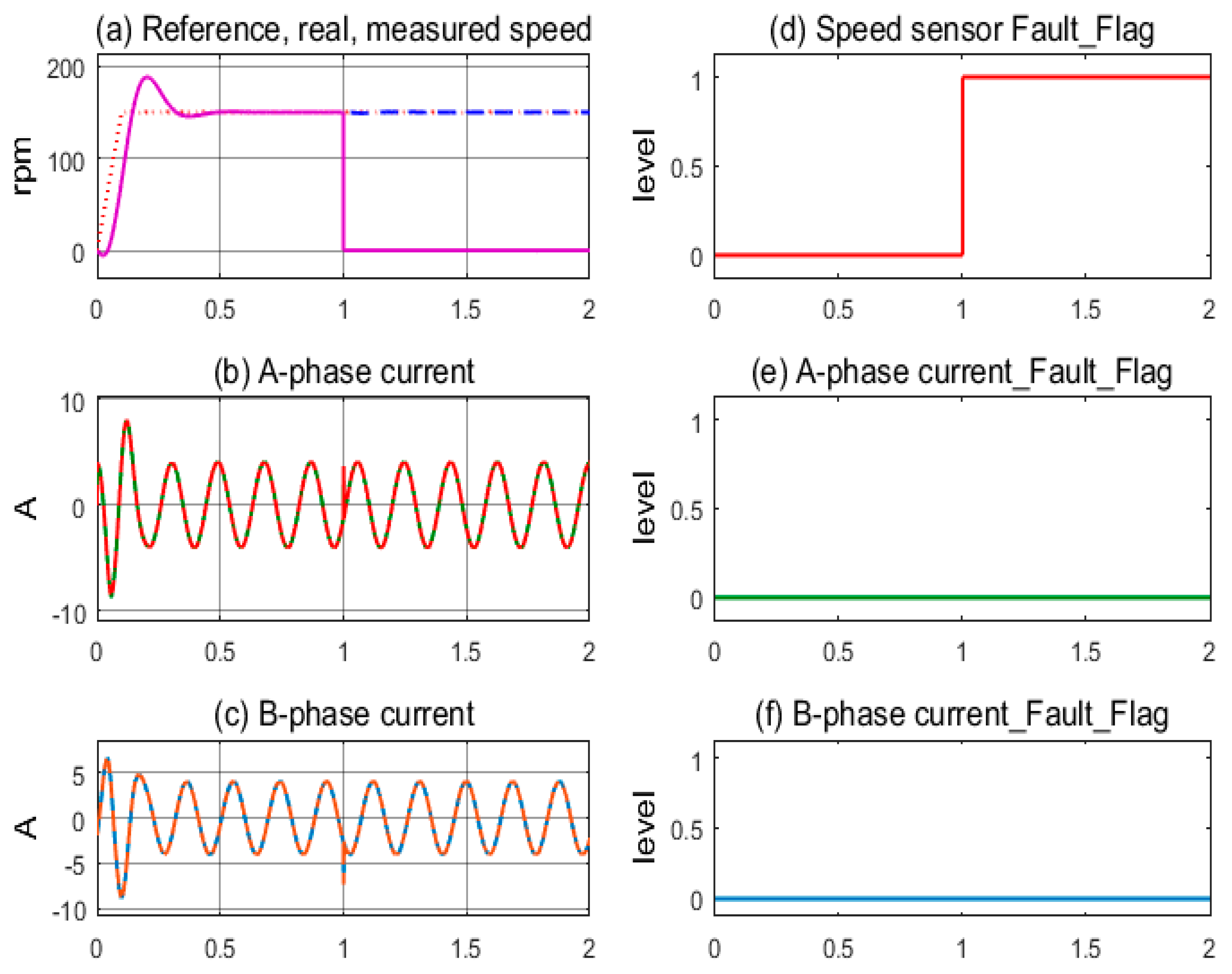
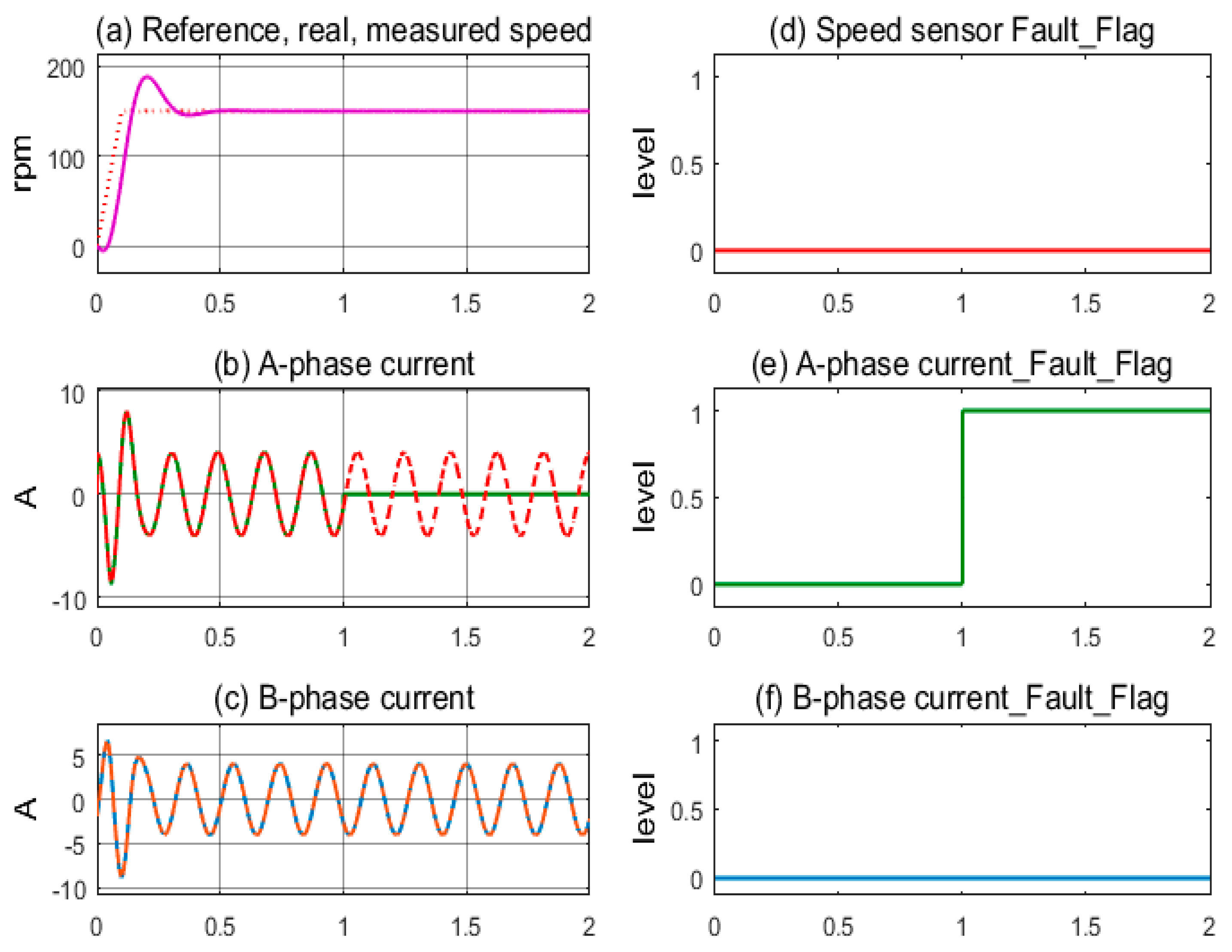
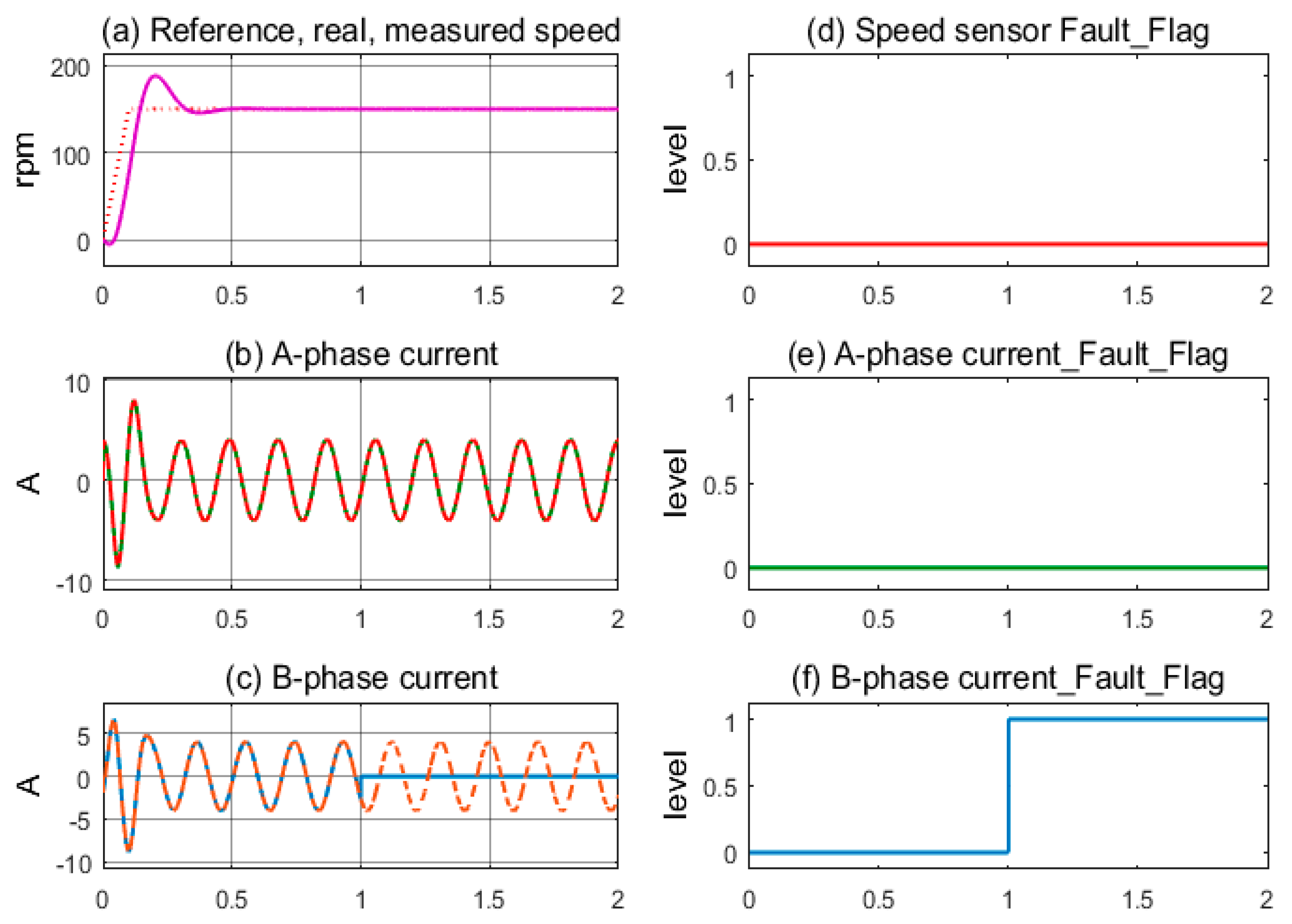
3. Simulation Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Names |
|---|---|
| Stator/rotor flux vector | |
| Stator/rotor current vector | |
| Stator voltage vector | |
| Stator/rotor resistance | |
| Stator/rotor/magnetizing inductance | |
| Rotor speed | |
| Mechanical rotor speed | |
| Number of pole pairs | |
| Rotor flux angle |
References
- Rahman, K.; Rahman, S.; Bhaskar, M.S.; Iqbal, A.; Khandakar, A.; Tariq, M.; Alamri, B. Field-oriented control of five-phase induction motor fed from space vector modulated matrix converter. IEEE Access 2022, 10, 17996–18007. [Google Scholar] [CrossRef]
- Mustafa, A.; Khaled, A.; Mehrdad, E.; Aydemir, A. Direct torque control versus indirect field-oriented control of induction motors for electric vehicle applications. Eng. Sci. Technol. 2020, 23, 1134–1143. [Google Scholar]
- Gouichiche, A.; Safa, A.; Chibani, A.; Tadjine, M. Global fault-tolerant control approach for vector control of an induction motor. Int. Trans. Electr. Energy Syst. 2020, 30, e12440. [Google Scholar] [CrossRef]
- Yu, W.; Zhao, C. Broad convolutional neural network based industrial process fault diagnosis with incremental learning capability. IEEE Trans. Ind. Electron. 2020, 67, 5081–5091. [Google Scholar] [CrossRef]
- Li, W.; Feng, G.; Li, Z.; Toulabi, M.S.; Kar, N.C. Extended Kalman filter based inductance estimation for dual three-phase permanent magnet synchronous motors under the single open-phase fault. IEEE Trans. Energy Convers. 2021, 37, 1134–1144. [Google Scholar] [CrossRef]
- Azzoug, Y.; Pusca, R.; Sahraoui, M.; Ammar, A.; Ameid, T.; Romary, R.; Cardoso, A.J. An active fault-tolerant control strategy for current sensors failure for induction motor drives using a single observer for currents estimation and axes transformation. Eur. J. Electr. Eng. 2021, 23, 467–474. [Google Scholar] [CrossRef]
- Das, S.; Manohar, M. A Resilient Current Sensor Fault-Tolerant Strategy for Vector-Controlled Induction Motor Drive. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 4313–4320. [Google Scholar] [CrossRef]
- Ebrahimi, S.H.; Choux, M.; Huynh, V.K. Diagnosis of Sensor Faults in PMSM and Drive System Based on Structural Analysis. In Proceedings of the IEEE International Conference on Mechatronics (ICM), Kashiwa, Japan, 7–9 March 2021; pp. 1–6. [Google Scholar]
- Li, Y.; Gong, P. Fault-Tolerant Control of Induction Motor with Current Sensors Based on Dual-Torque Model. Energies 2023, 16, 3442. [Google Scholar] [CrossRef]
- Zuo, Y.; Ge, X.; Chang, Y.; Chen, Y.; Xie, D.; Wang, H.; Woldegiorgis, A.T. Current Sensor Fault-Tolerant Control for Speed-Sensorless Induction Motor Drives Based on the SEPLL Current Reconstruction Scheme. IEEE Trans. Ind. Appl. 2023, 59, 845–856. [Google Scholar] [CrossRef]
- Azzoug, Y.; Sahraoui, M.; Pusca, R.; Ameid, T.; Romary, R.; Marques Cardoso, A.J. Current sensors fault detection and tolerant control strategy for three-phase induction motor drives. Electr. Eng. 2021, 103, 881–898. [Google Scholar] [CrossRef]
- Liu, Y.; Stettenbenz, M.; Bazzi, A.M. Smooth Fault-Tolerant Control of Induction Motor Drives with Sensor Failures. IEEE Trans. Power Electron. 2019, 34, 3544–3552. [Google Scholar] [CrossRef]
- Chen, Y.; Xie, D.; Zuo, Y.; Chang, Y.; Ge, X. Current sensor fault-tolerant control for induction motor with speed-sensorless based on SMO and SEPLL. In Proceedings of the 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongiu, Republic of Korea, 31 October–3 November 2021; pp. 1988–1992. [Google Scholar]
- Nguyen, T.X.; Nguyen, M.C.H.; Tran, C.D. Sensor fault diagnosis technique applied to three-phase induction motor drive. Bull. Electr. Eng. Inform. 2022, 11, 3127–3135. [Google Scholar] [CrossRef]
- Tran, C.D.; Kuchar, M.; Sobek, M.; Sotola, V.; Dinh, B.H. Sensor Fault Diagnosis Method Based on Rotor Slip Applied to Induction Motor Drive. Sensors 2022, 22, 8636. [Google Scholar] [CrossRef] [PubMed]
- El Merrassi, W.; Abounada, A.; Ramzi, M. Advanced speed sensorless control strategy for induction machine based on neuro-MRAS observer. Mater. Today Proc. 2021, 45, 7615–7621. [Google Scholar] [CrossRef]
- Yan, X.; Cheng, M. An MRAS Observer-Based Speed Sensorless Control Method for Dual-Cage Rotor Brushless Doubly Fed Induction Generator. IEEE Trans. Power Electron. 2022, 37, 12705–12714. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, Y.; Tian, X.; Cao, J.; Zhu, J. Speed sensorless control for IPMSMs using a modified MRAS with gray wolf optimization algorithm. IEEE Trans. Transp. Electrif. 2022, 8, 1326–1337. [Google Scholar] [CrossRef]
- Agrawal, G.; Mohan, H.; Pathak, M. Improved Speed Sensorless Control of Induction Motor Drive Using Artificial Neural Network. In Proceedings of the 2nd International Conference on Power Electronics & IoT Applications in Renewable Energy and its Control (PARC), Mathura, India, 21–22 January 2022; pp. 1–6. [Google Scholar]
- Zuo, Y.; Ge, X.; Zheng, Y.; Chen, Y.; Wang, H.; Woldegiorgis, A.T. An adaptive active disturbance rejection control strategy for speed-sensorless induction motor drives. IEEE Trans. Transp. Electrif. 2022, 8, 3336–3348. [Google Scholar] [CrossRef]
- Tran, C.D.; Brandstetter, P.; Nguyen, M.C.H.; Ho, S.D.; Pham, P.N.; Dinh, B.H. An Improved Current-Sensorless Method for Induction Motor Drives Applying Hysteresis Current Controller. Indones. J. Electr. Eng. Inform. (IJEEI) 2021, 9, 130–140. [Google Scholar]
- Tran, C.D.; Nguyen, T.X.; Nguyen, P.D. A field-oriented control method using the virtual currents for the induction motor drive. Int. J. Power Electron. Drive Syst. (IJPEDS) 2021, 12, 2095–2102. [Google Scholar] [CrossRef]
- Adamczyk, M.; Orlowska-Kowalska, T. Virtual Current Sensor in the Fault-Tolerant Field-Oriented Control Structure of an Induction Motor Drive. Sensors 2019, 19, 4979. [Google Scholar] [CrossRef]
- Azzoug, Y.; Sahraoui, M.; Pusca, R.; Ameid, T.; Romary, R.; Marques Cardoso, A.J. A Single Observer for Currents Estimation in Sensor’s Fault-Tolerant Control of Induction Motor Drives. In Proceedings of the International Conference on Applied Automation and Industrial Diagnostics (ICAAID), Elazig, Turkey, 25–27 September 2019; pp. 1–6. [Google Scholar]
- Azzoug, Y.; Sahraoui, M.; Pusca, R.; Ameid, T.; Romary, R.; Marques Cardoso, A.J. High-performance vector control without AC phase current sensors for induction motor drives: Simulation and real-time implementation. ISA Trans. 2020, 109, 295–306. [Google Scholar] [CrossRef] [PubMed]




| Flag Status | Sensor Status | Output |
|---|---|---|
| Fw = 0, Fia = 0, Fib = 0 | Healthy | ωm, iSα, iSβ |
| Fw = 1, Fia = 0, Fib = 0 | Speed sensor failure | ωest, iSα, iSβ |
| Fw = 0, Fia = 1, Fib = 0 | A-phase sensor failure | ωm, iSαest, iSβest |
| Fw = 0, Fia = 0, Fib = 1 | B-phase sensor failure | ωm, iSαest, iSβest |
| Status of the Sensors | Flag Status | Accurate Signals | ||||
|---|---|---|---|---|---|---|
| Speed Encoder | A-Phase Current | B-Phase Current | Fw | Fia | Fib | ωm, ωest, iSα, iSβ, iSαest, iSβest |
| Healthy | Healthy | Healthy | 0 | 0 | 0 | ωm, iSα, iSβ |
| Faulty | Healthy | Healthy | 1 | 0 | 0 | ωest, iSα, iSβ |
| Healthy | Faulty | Healthy | 0 | 1 | 0 | ωm, iSαest, iSβest |
| Healthy | Healthy | Faulty | 0 | 0 | 1 | ωm, iSαest, iSβest |
| FTC Method | Applied to Current Sensors | Applied to Speed Sensor | Accurate Faulty Sensor Location | Risk of the Defective Sensor Type Misdiagnosis |
|---|---|---|---|---|
| LO combining axes transformation [6] | Yes | No | Yes | Yes |
| Estimated current combining TDO [7] | Yes | No | Yes | Yes |
| Dual-torque model [9] | Yes | No | Yes | Yes |
| SMO and SEPLL [13] | Yes | No | Yes | Yes |
| Current space vector (proposed method) | Yes | Yes | Yes | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, C.D.; Kuchar, M.; Sotola, V.; Nguyen, P.D. Fault-Tolerant Control Based on Current Space Vectors against Total Sensor Failures. Sensors 2024, 24, 3558. https://doi.org/10.3390/s24113558
Tran CD, Kuchar M, Sotola V, Nguyen PD. Fault-Tolerant Control Based on Current Space Vectors against Total Sensor Failures. Sensors. 2024; 24(11):3558. https://doi.org/10.3390/s24113558
Chicago/Turabian StyleTran, Cuong Dinh, Martin Kuchar, Vojtech Sotola, and Phuong Duy Nguyen. 2024. "Fault-Tolerant Control Based on Current Space Vectors against Total Sensor Failures" Sensors 24, no. 11: 3558. https://doi.org/10.3390/s24113558
APA StyleTran, C. D., Kuchar, M., Sotola, V., & Nguyen, P. D. (2024). Fault-Tolerant Control Based on Current Space Vectors against Total Sensor Failures. Sensors, 24(11), 3558. https://doi.org/10.3390/s24113558