
RIS-Assisted D2D Communication over Nakagami-m Fading with RSMA

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
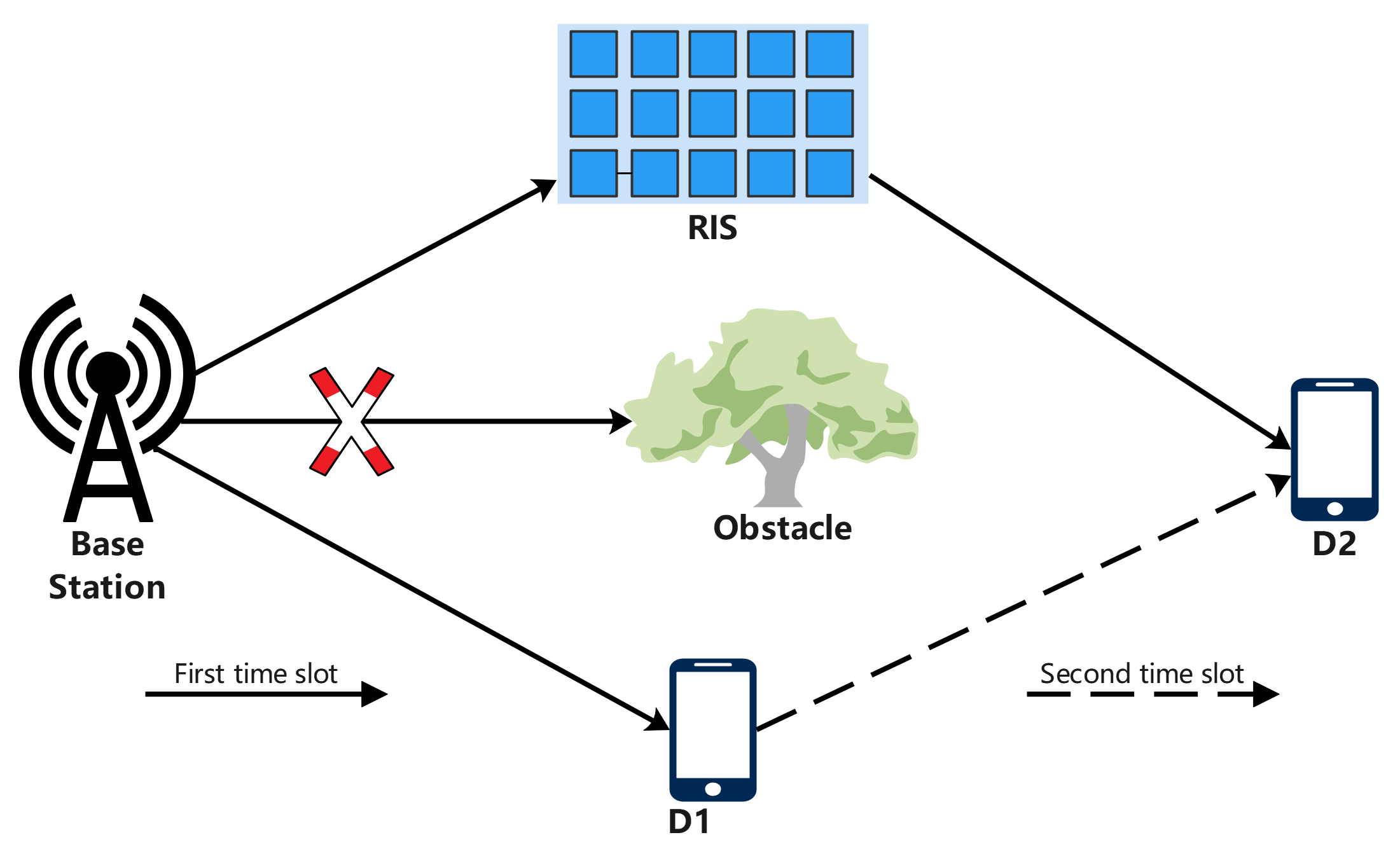
- We propose an RIS-assisted communication system consisting of a source, an RIS, and two near and far devices, where the far device is beyond the coverage of the source, and the RIS is used to assist the far device communication. The achievable ergodic rate of the proposed system over a Nakagami-m fading channel was analyzed.
- We carried out the analysis of the achievable ergodic rate of RIS and D2D links with RSMA and then combined their signals by an MRC scheme, which could help to obtain a higher achievable ergodic rate compared with conventional RIS-assisted D2D communication systems. Furthermore, we derived the closed-form expression of the achievable ergodic rate at the destination, where our proposed scheme performed better than the previous benchmark.
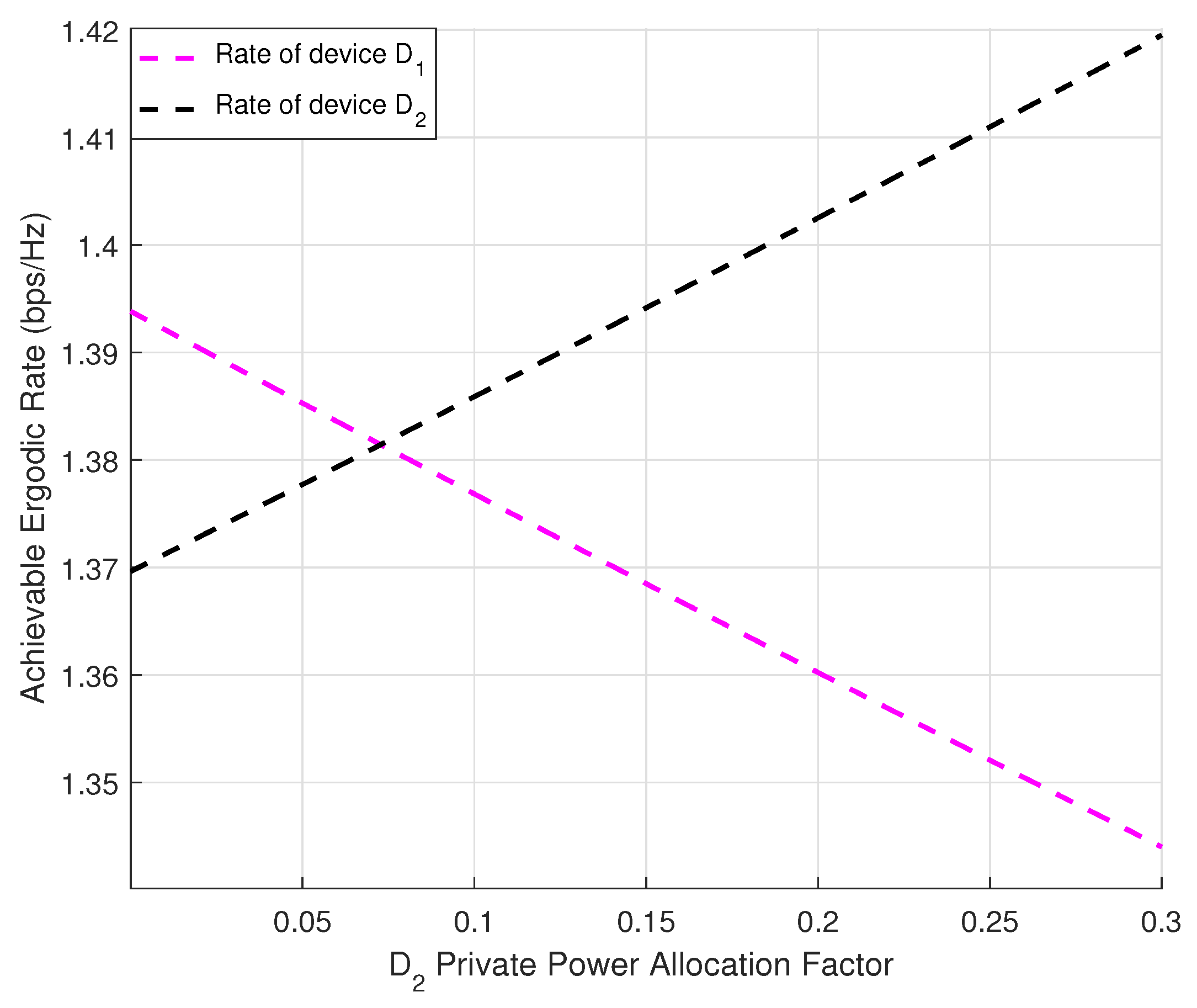
- The influence of power allocation factors and the number of reflective elements on the achievable ergodic rate were also investigated, where the optimal number of RIS elements was found for the proposed system. The numerical results verified the correctness of our analysis, as well as the superiority of the proposed scheme compared with a conventional scheme.
2. System Model
2.1. Recent Scheme Revisited
2.2. Proposed Receiver Design
3. Achievable Ergodic Rate Analysis
3.1. Analysis for RIS
3.2. Analysis for D2D Communication
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Analysis of Achievable Ergodic Rate in D2D Channel
References
- Huang, C.; Hu, S.; Alexandropoulos, G.C.; Zappone, A.; Yuen, C.; Zhang, R.; Renzo, M.D.; Debbah, M. Holographic MIMO surfaces for 6G wireless networks: Opportunities, challenges and trends. IEEE Wirel. Commun. Lett. 2020, 27, 118–125. [Google Scholar] [CrossRef]
- Wang, T.; Fang, F.; Ding, Z. An SCA and relaxation based energy efficiency optimization for multi-user RIS-assisted NOMA networks. IEEE Trans. Veh. Technol. 2022, 71, 6843–6847. [Google Scholar] [CrossRef]
- Pan, C.; Ren, H.; Wang, K.; Kolb, J.F.; Elkashlan, M.; Chen, M.; Renzo, M.D.; Hao, Y.; Wang, J.; Swindlehurst, A.L.; et al. Reconfigurable intelligent surfaces for 6G systems: Principles, applications, and research directions. IEEE Commun. Mag. 2021, 59, 14–20. [Google Scholar] [CrossRef]
- Ha, D.-H.; Duy, T.T.; Son, P.N.; Le-Tien, T.; Voznak, M. Security-reliability trade-off analysis for rateless codes-based relaying protocols using NOMA, cooperative jamming and partial relay selection. IEEE Access 2021, 9, 131087–131108. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef]
- Salhab, A.; Samuh, M. Accurate performance analysis of reconfigurable intelligent surfaces over Rician fading channels. IEEE Wireless Commun. Lett. 2021, 10, 1051–1055. [Google Scholar] [CrossRef]
- Yang, F.; Ni, Y.; Xia, W.; Liu, Y.; Zhang, H.; Zhao, H. Ergodic achievable rate for RIS-assisted D2D communication over Nakagami-m fading. In Proceedings of the 2022 IEEE 22nd International Conference on Communication Technology (ICCT), Nanjing, China, 11–14 November 2022; pp. 1250–1254. [Google Scholar]
- Mu, G.; Zhang, P.; Hou, Y.; Zhong, S.; Huang, L.; Yuan, T. Efficient active elements selection algorithm for hybrid RIS-assisted D2D communication system. IEEE Commun. Lett. 2024, 28, 377–381. [Google Scholar] [CrossRef]
- Zhuo, B.; Duan, W.; Gu, J.; Gu, X.; Zhang, G.; Ji, Y.; Choi, J.; Wen, M. Partial-NOMA based physical layer security: Forwarding design and secrecy analysis. IEEE Trans. Intel. Trans. Syst. 2023, 24, 7471–7484. [Google Scholar] [CrossRef]
- Bian, M.; Shi, Y.; Huang, Y.; Tang, X.-W. QoS-aware energy storage maximization in the RIS-aided joint-SWIPT-MEC System. IEEE Commun. Lett. 2023, 27, 3434–3438. [Google Scholar] [CrossRef]
- Zhakipov, Z.; Rabie, K.M.; Li, X.; Nauryzbayev, G. Accurate approximation to channel distributions of cascaded RIS-aided systems with phase errors over Nakagami-m channels. IEEE Wireless Commun. Lett. 2023, 12, 922–926. [Google Scholar] [CrossRef]
- Alakoca, H.; Babaei, M.; Durak-Ata, L.; Basar, E. RIS-empowered non-linear energy harvesting communications over nakagami-m channels. IEEE Commun. Lett. 2022, 26, 2215–2219. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- Ak, E.; Canberk, B. Forecasting quality of service for next-generation data-driven WiFi6 campus networks. IEEE Trans. Netw. Serv. 2021, 18, 4744–4755. [Google Scholar] [CrossRef]
- Xu, M.; Ji, F.; Wen, M.; Duan, W. Novel receiver design for the cooperative relaying system with non-orthogonal multiple access. IEEE Commun. Lett. 2016, 20, 1679–1682. [Google Scholar] [CrossRef]
- Arora, G.; Jaiswal, A. Zero SIC based rate splitting multiple access technique. IEEE Commun. Lett. 2022, 26, 2430–2434. [Google Scholar] [CrossRef]
- Dizdar, O.; Mao, Y.; Clerckx, B. Rate-splitting multiple access to mitigate the curse of mobility in (massive) MIMO networks. IEEE Trans. Commun. 2021, 69, 6765–6780. [Google Scholar] [CrossRef]
- Mao, Y.; Dizdar, O.; Clerckx, B.; Schober, R.; Popovski, P.; Poor, H.V. Rate-splitting multiple access: Fundamentals, survey, and future research trends. IEEE Commun. Surv. Tutor. 2022, 24, 2073–2126. [Google Scholar] [CrossRef]
- Joudeh, H.; Clerckx, B. Sum-rate maximization for linearly precoded downlink multiuser MISO systems with partial CSIT: A rate-splitting approach. IEEE Trans. Commun. 2016, 64, 4847–4861. [Google Scholar] [CrossRef]
- Xu, J.; Dizdar, O.; Clerckx, B. Rate-splitting multiple access for short-packet uplink communications: A finite blocklength analysis. IEEE Commun. Lett. 2023, 27, 517–521. [Google Scholar] [CrossRef]
- Xu, Y.; Mao, Y.; Dizdar, O.; Clerckx, B. Max-min fairness of rate- splitting multiple access with finite blocklength communications. IEEE Trans. Veh. Technol. 2023, 72, 6816–6821. [Google Scholar] [CrossRef]
- Can, M.; Ilter, M.C.; Altunbas, I. Data-oriented downlink RSMA systems. IEEE Commun. Lett. 2023, 27, 2812–2816. [Google Scholar] [CrossRef]
- Sahin, M.M.; Dizdar, O.; Clerckx, B.; Arslan, H. Multicarrier rate-splitting multiple access: Superiority of OFDM-RSMA over OFDMA and OFDM-NOMA. IEEE Commun. Lett. 2023, 27, 3088–3092. [Google Scholar] [CrossRef]
- Bansal, A.; Agrawal, N.; Singh, K. Rate-Splitting multiple access for UAV-based RIS-enabled interference-limited vehicular communication system. IEEE Trans. Intell. Veh. 2023, 8, 936–948. [Google Scholar] [CrossRef]
- Shambharkar, D.; Dhok, S.; Sharma, P.K. Performance analysis of RIS assisted RSMA communication system. In Proceedings of the 2022 National Conference on Communications (NCC), Mumbai, India, 24–27 May 2022; pp. 227–232. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, Y.; Chen, L.; Yan, P.; Duan, W. RIS-Assisted D2D Communication over Nakagami-m Fading with RSMA. Sensors 2024, 24, 3423. https://doi.org/10.3390/s24113423
Ding Y, Chen L, Yan P, Duan W. RIS-Assisted D2D Communication over Nakagami-m Fading with RSMA. Sensors. 2024; 24(11):3423. https://doi.org/10.3390/s24113423
Chicago/Turabian StyleDing, Yunhao, Linfei Chen, Peishun Yan, and Wei Duan. 2024. "RIS-Assisted D2D Communication over Nakagami-m Fading with RSMA" Sensors 24, no. 11: 3423. https://doi.org/10.3390/s24113423
APA StyleDing, Y., Chen, L., Yan, P., & Duan, W. (2024). RIS-Assisted D2D Communication over Nakagami-m Fading with RSMA. Sensors, 24(11), 3423. https://doi.org/10.3390/s24113423