
Passive Polarized Vision for Autonomous Vehicles: A Review

 ,
,  ,
,  , , ,
, , ,  and
and 
Abstract
1. Introduction
- What kind of polarization sensing can we embed into robots? (see Section 2)
- Can we geolocate ourselves and find the true north heading by detecting light scattering from the sky? (see Section 3)
- How do polarization images relate to the physical properties of reflecting surfaces in the context of scene understanding? (see Section 4)
- Section 2.1. Stokes formalism;
- Section 2.2. State-of-the-art of polarization analysis techniques;
- Section 2.3. Calibration and preprocessing;
- Section 2.4. Extension to multispectral polarimetric sensing;
- Section 2.5. Summary and future directions in embedded polarization sensing.
- Section 3.1. Historical overview of polarization navigation;
- Section 3.2. The skylight’s polarization pattern;
- Section 3.3. Polarization-based sensors dedicated to navigation;
- Section 3.4. Methods for combining polarization-based geolocation to an integrated navigation system;
- Section 3.5. Summary and future directions in polarized vision for navigation.
- Section 4.1. Polarization and reflection;
- Section 4.2. Detection and classification;
- Section 4.3. Shape from polarization;
- Section 4.4. 3D-depth with polarization cues;
- Section 4.5. Summary and future directions in polarized vision for scene understanding.
2. Embedded Polarization Imaging
2.1. Stokes Formalism
2.2. State-of-the-Art Polarization State Analyzers (PSA)
2.2.1. PSA Using Division of Time (DoT)
PSA with Rotating Polarization Elements
PSA Using Liquid Crystal Cells
2.2.2. PSA Using Replication-of-Aperture (RoAp)
2.2.3. PSA Using Division of Amplitude (DoAmp)
Use of Beam Splitters
Use of PGA
2.2.4. PSA Using Division of Aperture (DoAp)
2.2.5. PSA Using Division of Focal Plane (DoFP)
2.3. Calibration and Preprocessing Operations
2.3.1. PSA Calibration
2.3.2. Spatial Reconstruction of DoFP Images
2.3.3. Spatial Registration of Elementary Polarization Images
2.3.4. Denoising Polarization Images
2.4. Extension to Multispectral Polarimetric Sensing
2.5. Summary and Future Directions in Embedded Polarization Sensing
3. Polarized Vision for Robotics Navigation
3.1. Historical Overview of Polarization Navigation
3.2. The Skylight Polarization Pattern
3.3. Polarization-Based Sensors Dedicated to Navigation
Terrestrial Robots
Aerial Robots
Military Devices
Automotive Applications
Ant-Inspired Path Integration
3.3.1. Celestial Compasses Based on Stokes Methods
3.3.2. Celestial Compasses Based on Imaging Methods by Optical Transformation
3.3.3. Celestial Compasses Based on Non-Imaging Methods or Biomimetic Approaches
3.4. Polarization-Based Geolocalization
3.4.1. Polarization-Based Geolocalization Using Solar Ephemeris
3.4.2. Polarization-Based Geolocation Using the North Celestial Pole (SkyPole Algorithm)
3.4.3. Can the Underwater Sky Polarization Be Useful for Navigation Purposes?
3.5. Summary and Future Directions in Polarized Vision for Robotics Navigation
4. Polarized Vision for Scene Understanding
4.1. Polarization and Reflection
4.1.1. Recall of Fresnel Formulae
4.1.2. Partial Polarizer
4.1.3. Specular Reflections
4.1.4. Diffuse Reflections
4.2. Detection and Classification
4.3. Shape from Polarization
- Diffuse reflection As long as the refractive index is known, there is no ambiguity in determining the zenith angle from the . The main drawback is that the is lower for diffuse reflection. An ambiguity remains regarding the azimuth angle which is equal to or , since the light is polarized in the plane defined by the normal and the reflected ray (Figure 18).
- Specular reflection Assuming the refractive index is known, as shown in Figure 14, an ambiguity appears in the determination of the zenith angle from the . In the same way, there is ambiguity as to the determination of the azimuth angle which is equal to since the light is polarized orthogonally to the incidence plane (Figure 18).
4.4. Three-Dimensional Depth with Polarization Cues
4.4.1. Stereo-Vision Systems
4.4.2. Pose Estimation and SLAM
4.5. Summary and Future Directions in Polarized Vision for Scene Understanding
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AoLP | Angle of Linear Polarization (sometimes referred to as Angle of Polarization) |
| APMR | Accuracy of Polarization Measurement Redundancy |
| BM3D | Block-Matching and 3D filtering |
| DoA | Division-of-Aperture |
| DoFP | Division-of-Focal Plane |
| DoLP | Degree of Linear Polarization |
| DoP | Degree of Polarization |
| DoT | Division-Of-Time |
| DRA | Dorsal Rim Area |
| ENU | East North Up |
| fps | frames per second |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| IFoV | Instantaneous Field of View |
| INS | Inertial Navigation System |
| ISO | International Organization for Standardization |
| NCP | North Celestial Pole |
| PbC | Polarization-based Compass |
| PFA | Polarimetric Filter Array |
| PG | Polarization Gratings |
| PSA | Polarization State Analyzer |
| RGB | Red Green Blue |
| RMSE | Root Mean Squared Error |
| SLAM | Simultaneous Localization And Mapping |
| SNR | Signal-to-Noise Ratio |
| UAV | Unmanned Aerial Vehicle |
| UV | UltraViolet |
References
- Yang, G.Z.; Bellingham, J.; Dupont, P.E.; Fischer, P.; Floridi, L.; Full, R.; Jacobstein, N.; Kumar, V.; McNutt, M.; Merrifield, R.; et al. The grand challenges of science robotics. Sci. Robot. 2018, 3, eaar7650. [Google Scholar] [CrossRef] [PubMed]
- Horváth, G.; Lerner, A.; Shashar, N. Polarized Light and Polarization Vision in Animal Sciences; Springer: Berlin/Heidelberg, Germany, 2014; Volume 2. [Google Scholar]
- Able, K.; Able, M. Manipulations of polarized skylight calibrate magnetic orientation in a migratory bird. J. Comp. Phys. A 1995, 177, 351–356. [Google Scholar] [CrossRef]
- Cochran, W.W.; Mouritsen, H.; Wikelski, M. Migrating Songbirds Recalibrate Their Magnetic Compass Daily from Twilight Cues. Science 2004, 304, 405–408. [Google Scholar] [CrossRef] [PubMed]
- Akesson, S. The Ecology of Polarisation Vision in Birds. In Polarized Light and Polarization Vision in Animal Sciences, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 275–292. [Google Scholar] [CrossRef]
- Wehner, R. Desert Navigator: The Journey of an Ant; Harvard University Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Pieron, H. Du rôle du sens musculaire dans l’orientation de quelques espèces de fourmis. Bull. Inst. Gen. Psychol. 1904, 4, 168–186. [Google Scholar]
- Santschi, F. Observations et remarques critiques sur le mécanisme de l’orientation chez les fourmis. Rev. Suisse Zool. 1911, 19, 303–338. [Google Scholar]
- Papi, F. Animal navigation at the end of the century: A retrospect and a look forward. Ital. J. Zool. 2001, 68, 171–180. [Google Scholar] [CrossRef]
- Lambrinos, D.; Möller, R.; Labhart, T.; Pfeifer, R.; Wehner, R. A mobile robot employing insect strategies for navigation. Robot. Auton. Syst. 2000, 30, 39–64. [Google Scholar] [CrossRef]
- Dupeyroux, J.; Serres, J.R.; Viollet, S. AntBot: A six-legged walking robot able to home like desert ants in outdoor environments. Sci. Robot. 2019, 4, eaau0307. [Google Scholar] [CrossRef] [PubMed]
- Dupeyroux, J.; Viollet, S.; Serres, J.R. An ant-inspired celestial compass applied to autonomous outdoor robot navigation. Robot. Auton. Syst. 2019, 117, 40–56. [Google Scholar] [CrossRef]
- Barta, A.; Suhai, B.; Horváth, G. Polarization Cloud Detection with Imaging Polarimetry. In Polarized Light and Polarization Vision in Animal Sciences; Springer: Berlin/Heidelberg, Germany, 2014; pp. 585–602. [Google Scholar]
- Hegedüs, R.; Åkesson, S.; Wehner, R.; Horváth, G. Could Vikings have navigated under foggy and cloudy conditions by skylight polarization? On the atmospheric optical prerequisites of polarimetric Viking navigation under foggy and cloudy skies. Proc. R. Soc. A Math. Phys. Eng. Sci. 2007, 463, 1081–1095. [Google Scholar] [CrossRef]
- Horváth, G.; Barta, A.; Pomozi, I.; Suhai, B.; Hegedüs, R.; Åkesson, S.; Meyer-Rochow, B.; Wehner, R. On the trail of Vikings with polarized skylight: Experimental study of the atmospheric optical prerequisites allowing polarimetric navigation by Viking seafarers. Philos. Trans. R. Soc. B Biol. Sci. 2011, 366, 772–782. [Google Scholar] [CrossRef]
- Ropars, G.; Gorre, G.; Le Floch, A.; Enoch, J.; Lakshminarayanan, V. A depolarizer as a possible precise sunstone for Viking navigation by polarized skylight. Proc. R. Soc. A Math. Phys. Eng. Sci. 2012, 468, 671–684. [Google Scholar] [CrossRef]
- Takacs, P.; Szaz, D.; Pereszlenyi, A.; Horvath, G. Speedy bearings to slacked steering: Mapping the navigation patterns and motions of Viking voyages. PLoS ONE 2023, 18, e0293816. [Google Scholar] [CrossRef]
- Standard ISO 3691-4:2023; Industrial Trucks—Safety Requirements and Verification—Part 4: Driverless Industrial Trucks and Their Systems. ISO: Geneva, Switzerland, 2023. Available online: https://www.iso.org/obp/ui/fr/#iso:std:iso:3691:-4:ed-2:v1:en (accessed on 19 March 2024).
- Standard ISO 26262-1:2018; Road Vehicles—Functional Safety—Part 1: Vocabulary. ISO: Geneva, Switzerland, 2018. Available online: https://www.iso.org/obp/ui/fr/#iso:std:iso:26262:-1:ed-2:v1:en (accessed on 19 March 2024).
- Standard ISO 21448:2022; Road Vehicles—Safety of the Intended Functionality. ISO: Geneva, Switzerland, 2022. Available online: https://www.iso.org/obp/ui/fr/#iso:std:iso:21448:ed-1:v1:en (accessed on 19 March 2024).
- Li, S.; Kong, F.; Xu, H.; Guo, X.; Li, H.; Ruan, Y.; Cao, S.; Guo, Y. Biomimetic Polarized Light Navigation Sensor: A Review. Sensors 2023, 23, 5848. [Google Scholar] [CrossRef]
- Kong, F.; Guo, Y.; Zhang, J.; Fan, X.; Guo, X. Review on bio-inspired polarized skylight navigation. Chin. J. Aeronaut. 2023, 36, 14–37. [Google Scholar] [CrossRef]
- Li, Q.; Dong, L.; Hu, Y.; Hao, Q.; Wang, W.; Cao, J.; Cheng, Y. Polarimetry for bionic geolocation and navigation applications: A review. Remote Sens. 2023, 15, 3518. [Google Scholar] [CrossRef]
- Liu, Y.; Wenzhou, Z.; Fan, C.; Zhang, L. A Review of Bionic Polarized Light Localization Methods. In Proceedings of the 2023 5th International Conference on Intelligent Control, Measurement and Signal Processing (ICMSP), Chengdu, China, 19–21 May 2023; pp. 793–803. [Google Scholar] [CrossRef]
- Tominaga, S.; Kimachi, A. Polarization imaging for material classification. Opt. Eng. 2008, 47, 123201. [Google Scholar] [CrossRef]
- Li, X.; Yan, L.; Qi, P.; Zhang, L.; Goudail, F.; Liu, T.; Zhai, J.; Hu, H. Polarimetric Imaging via Deep Learning: A Review. Remote Sens. 2023, 15, 1540. [Google Scholar] [CrossRef]
- Stokes, G.G. On the composition and resolution of streams of polarized light from different sources. Trans. Camb. Philos. Soc. 1852, 9, 339–416. [Google Scholar] [CrossRef]
- Goldstein, D.H. Polarized Light, 3rd ed.; CRC Press Inc.: Boca Raton, FL, USA, 2010; p. 808. [Google Scholar]
- Poincaré, H. Théorie Mathématique de la Lumière; Georges Carré: Paris, France, 1892; Volume II. [Google Scholar]
- Geek3. Poincaré Sphere. Available online: https://commons.wikimedia.org/wiki/File:Poincare-sphere_arrows.svg (accessed on 20 March 2024).
- Perrin, F. Polarization of Light Scattered by Isotropic Opalescent Media. J. Chem. Phys. 1942, 10, 415–427. [Google Scholar] [CrossRef]
- Mueller, H. The foundation of optics. J. Opt. Soc. Am. 1948, 38, 661. [Google Scholar]
- Jones, D.; Goldstein, D.; Spaulding, J. Reflective and polarimetric characteristics of urban materials. In Polarization: Measurement, Analysis, and Remote Sensing VII; Proceedings of Defense and Security Symposium, Orlando, FL, USA; SPIE: Bellingham, WA, USA, 2006; Volume 6240. [Google Scholar] [CrossRef]
- Hoover, B.G.; Tyo, J.S. Polarization components analysis for invariant discrimination. Appl. Opt. 2007, 46, 8364–8373. [Google Scholar] [CrossRef]
- Wang, P.; Chen, Q.; Gu, G.; Qian, W.; Ren, K. Polarimetric Image Discrimination With Depolarization Mueller Matrix. IEEE Photonics J. 2016, 8, 6901413. [Google Scholar] [CrossRef]
- Quéau, Y.; Leporcq, F.; Lechervy, A.; Alfalou, A. Learning to classify materials using Mueller imaging polarimetry. In Proceedings of the Fourteenth International Conference on Quality Control by Artificial Vision, Mulhouse, France, 15–17 May 2019; SPIE: Bellingham, WA, USA, 2019; Volume 11172. [Google Scholar] [CrossRef]
- Kupinski, M.; Li, L. Evaluating the Utility of Mueller Matrix Imaging for Diffuse Material Classification. J. Imaging Sci. Technol. 2020, 64, 060409-1–060409-7. [Google Scholar] [CrossRef]
- Pierangelo, A.; Nazac, A.; Benali, A.; Validire, P.; Cohen, H.; Novikova, T.; Ibrahim, B.H.; Manhas, S.; Fallet, C.; Antonelli, M.R.; et al. Polarimetric imaging of uterine cervix: A case study. Opt. Express 2013, 21, 14120–14130. [Google Scholar] [CrossRef]
- Van Eeckhout, A.; Lizana, A.; Garcia-Caurel, E.; Gil, J.J.; Sansa, A.; Rodríguez, C.; Estévez, I.; González, E.; Escalera, J.C.; Moreno, I.; et al. Polarimetric imaging of biological tissues based on the indices of polarimetric purity. J. Biophotonics 2018, 11, e201700189. [Google Scholar] [CrossRef]
- Slonaker, R.; Takano, Y.; Liou, K.N.; Ou, S.C. Circular polarization signal for aerosols and clouds. In Atmospheric and Environmental Remote Sensing Data Processing and Utilization: Numerical Atmospheric Prediction and Environmental Monitoring; Proceedings of Optics and Photonics 2005, San Diego, CA, USA; SPIE: Bellingham, WA, USA, 2005; Volume 5890, p. 5890. [Google Scholar] [CrossRef]
- Gassó, S.; Knobelspiesse, K.D. Circular polarization in atmospheric aerosols. Atmos. Chem. Phys. 2022, 22, 13581–13605. [Google Scholar] [CrossRef]
- Tyo, J.S. Optimum linear combination strategy for an N-channel polarization-sensitive imaging or vision system. JOSA A 1998, 15, 359–366. [Google Scholar] [CrossRef]
- Tyo, J.S. Design of Optimal Polarimeters: Maximization of Signal-to-Noise Ratio and Minimization of Systematic Error. Appl. Opt. 2002, 41, 619–630. [Google Scholar] [CrossRef]
- Perkins, R.; Gruev, V. Signal-to-noise analysis of Stokes parameters in division of focal plane polarimeters. Opt. Express 2010, 18, 25815–25824. [Google Scholar] [CrossRef]
- Bass, M. Handbook of Optics: Volume ii-Design, Fabrication, and Testing; Sources and Detectors; Radiometry and Photometry; McGraw-Hill Education: Chicago, IL, USA, 2010. [Google Scholar]
- Mu, T.; Pacheco, S.; Chen, Z.; Zhang, C.; Liang, R. Snapshot linear-Stokes imaging spectropolarimeter using division-of-focal-plane polarimetry and integral field spectroscopy. Sci. Rep. 2017, 7, 42115. [Google Scholar] [CrossRef] [PubMed]
- Tyo, J.S.; Goldstein, D.L.; Chenault, D.B.; Shaw, J.A. Review of passive imaging polarimetry for remote sensing applications. Appl. Opt. 2006, 45, 5453–5469. [Google Scholar] [CrossRef] [PubMed]
- Voss, K.J.; Liu, Y. Polarized radiance distribution measurements of skylight. I. System description and characterization. Appl. Opt. 1997, 36, 6083–6094. [Google Scholar] [CrossRef] [PubMed]
- Kreuter, A.; Zangerl, M.; Schwarzmann, M.; Blumthaler, M. All-sky imaging: A simple, versatile system for atmospheric research. Appl. Opt. 2009, 48, 1091–1097. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Hu, X.; Lian, J.; Zhang, L.; Xian, Z.; Ma, T. Design of a Device for Sky Light Polarization Measurements. Sensors 2014, 14, 14916–14931. [Google Scholar] [CrossRef] [PubMed]
- Wolff, L.B.; Mancini, T.A.; Pouliquen, P.; Andreou, A.G. Liquid crystal polarization camera. IEEE Trans. Robot. Autom. 1997, 13, 195–203. [Google Scholar] [CrossRef]
- Chipman, R.A. Polarimetry. In Handbook of Optics; Book Section 22; McGraw-Hill: New York, NY, USA, 1995; Volume 2. [Google Scholar]
- Gandorfer, A.M. Ferroelectric retarders as an alternative to piezoelastic modulators for use in solar Stokes vector polarimetry. Opt. Eng. 1999, 38, 1402–1408. [Google Scholar] [CrossRef]
- Blakeney, S.L.; Day, S.E.; Stewart, J.N. Determination of unknown input polarisation using a twisted nematic liquid crystal display with fixed components. Opt. Commun. 2002, 214, 1–8. [Google Scholar] [CrossRef]
- Pust, N.J.; Shaw, J.A. Dual-field imaging polarimeter using liquid crystal variable retarders. Appl. Opt. 2006, 45, 5470–5478. [Google Scholar] [CrossRef]
- Gendre, L.; Foulonneau, A.; Bigué, L. Imaging linear polarimetry using a single ferroelectric liquid crystal modulator. Appl. Opt. 2010, 49, 4687–4699. [Google Scholar] [CrossRef]
- Lefaudeux, N.; Lechocinski, N.; Breugnot, S.; Clemenceau, P. Compact and robust linear Stokes polarization camera. In Polarization: Measurement, Analysis, and Remote Sensing VIII, Proceedings of the SPIE Defense and Security Symposium, Orlando, FL, USA; SPIE: Bellingham, WA, USA, 2008; Volume 6972, p. 69720B. [Google Scholar] [CrossRef]
- Vedel, M.; Breugnot, S.; Lechocinski, N. Full Stokes polarization imaging camera. In Proceedings of the Polarization Science and Remote Sensing V; Proceedings of Optical Engineering + Applications. Shaw, J.A., Tyo, J.S., Eds.; SPIE: Bellingham, WA, USA, 2011; Volume 8160, p. 81600X-13. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, H.; Song, P.; Shi, S.; Xu, W.; Liang, X. Ground-based full-sky imaging polarimeter based on liquid crystal variable retarders. Opt. Express 2014, 22, 8749–8764. [Google Scholar] [CrossRef]
- Horváth, G.; Barta, A.; Gál, J.; Suhai, B.; Haiman, O. Ground-based full-sky imaging polarimetry of rapidly changing skies and its use for polarimetric cloud detection. Appl. Opt. 2002, 41, 543–559. [Google Scholar] [CrossRef]
- Wang, D.; Liang, H.; Zhu, H.; Zhang, S. A Bionic Camera-Based Polarization Navigation Sensor. Sensors 2014, 14, 13006–13023. [Google Scholar] [CrossRef]
- Fan, C.; Hu, X.; Lian, J.; Zhang, L.; He, X. Design and Calibration of a Novel Camera-Based Bio-Inspired Polarization Navigation Sensor. IEEE Sens. J. 2016, 16, 3640–3648. [Google Scholar] [CrossRef]
- de Leon, E.; Brandt, R.; Phenis, A.; Virgen, M. Initial results of a simultaneous Stokes imaging polarimeter. In Polarization Science and Remote Sensing III, Proceedings of SPIE Optical Engineering + Applications, San Diego, CA, USA, 29–30 August 2007; Shaw, J.A., Tyo, J.S., Eds.; SPIE: St Bellingham, WA, USA, 2007; Volume 6682, p. 668215. [Google Scholar] [CrossRef]
- Fujita, K.; Itoh, Y.; Mukai, T. Development of simultaneous imaging polarimeter for asteroids. Adv. Space Res. 2009, 43, 325–327. [Google Scholar] [CrossRef]
- Gu, D.F.; Winker, B.; Wen, B.; Mansell, J.; Zachery, K.; Taber, D.; Chang, T.; Choi, S.; Ma, J.; Wang, X.; et al. Liquid crystal tunable polarization filters for polarization imaging. In Liquid Crystals XII; Proceedings of Photonic Devices + Applications; SPIE: Bellingham, WA, USA, 2008; Volume 7050, p. 7050. [Google Scholar] [CrossRef]
- Pezzaniti, J.L.; Chenault, D.B. A division of aperture MWIR imaging polarimeter. In Polarization Science and Remote Sensing II; Proceedings of Optics and Photonics 2005, San Diego, CA, USA; SPIE: Bellingham, WA, USA, 2005; Volume 5888, p. 58880V-12. [Google Scholar] [CrossRef]
- Chun, C.; Fleming, D.; Torok, E. Polarization-sensitive thermal imaging. In Automatic Object Recognition IV; Proceedings of the SPIE’s International Symposium on Optical Engineering and Photonics in Aerospace Sensing, Orlando, FL, USA; SPIE: Bellingham, WA, USA, 1994; Volume 2234, p. 2234. [Google Scholar] [CrossRef]
- Gruev, V.; Perkins, R.; York, T. CCD polarization imaging sensor with aluminum nanowire optical filters. Opt. Express 2010, 18, 19087–19094. [Google Scholar] [CrossRef]
- Brock, N.; Kimbrough, B.; Millerd, J. A pixelated micropolarizer-based camera for instantaneous interferometric measurements. In Polarization Science and Remote Sensing V, Proceedings of the SPIE Optical Engineering + Applications Symposium, San Diego, CA, USA; SPIE: Bellingham, WA, USA, 2011; Volume 8160. [Google Scholar] [CrossRef]
- Sony Semiconductor Solutions Group. Polarization Image Sensor Polarsens. Available online: https://www.sony-semicon.com/files/62/flyer_industry/IMX250_264_253MZR_MYR_Flyer_en.pdf (accessed on 20 March 2024).
- Efron, U. Spatial Light Modulator Technology: Materials, Devices, and Applications; Optical Engineering, Marcel Dekker, Inc.: New York, NY, USA, 1995. [Google Scholar]
- Jaulin, A.; Bigué, L.; Ambs, P. High-speed degree-of-polarization imaging with a ferroelectric liquid-crystal modulator. Opt. Eng. 2008, 47, 033201. [Google Scholar] [CrossRef]
- Gendre, L.; Foulonneau, A.; Bigué, L. Full Stokes polarimetric imaging using a single ferroelectric liquid crystal device. Opt. Eng. 2011, 50, 081209. [Google Scholar] [CrossRef]
- Xu, C.; Ma, J.; Ke, C.; Huang, Y.; Zeng, Z.; Weng, W.; Shen, L.; Wang, K. Full-Stokes polarization imaging based on liquid crystal variable retarders and metallic nanograting arrays. J. Phys. D Appl. Phys. 2020, 53, 015112. [Google Scholar] [CrossRef]
- Harchanko, J.; Pezzaniti, L.; Chenault, D.; Eades, G. Comparing a MWIR and LWIR polarimetric imaging for surface swimmer detection. In Optics and Photonics in Global Homeland Security IV, Proceedings of the SPIE Defense and Security Symposium, Orlando, FL, USA; SPIE: Bellingham, WA, USA, 2008; Volume 6945. [Google Scholar] [CrossRef]
- Shibata, S.; Suzuki, M.; Hagen, N.; Otani, Y. Video-rate full-Stokes imaging polarimeter using two polarization cameras. Opt. Eng. 2019, 58, 103103. [Google Scholar] [CrossRef]
- Gori, F. Measuring Stokes parameters by means of a polarization grating. Opt. Lett. 1999, 24, 584–586. [Google Scholar] [CrossRef] [PubMed]
- Rubin, N.A.; D’Aversa, G.; Chevalier, P.; Shi, Z.; Chen, W.T.; Capasso, F. Matrix Fourier optics enables a compact full-Stokes polarization camera. Science 2019, 365, eaax1839. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Escuti, M.J. Snapshot imaging spectropolarimeter utilizing polarization gratings. In Proceedings of the Imaging Spectrometry XIII, Proceedings of Optical Engineering + Applications, San Diego, CA, USA; SPIE: Bellingham, WA, USA, 2008; Volume 7086, pp. 29–38. [Google Scholar] [CrossRef]
- Bayer, B.E. Color Imaging Array. United States Patent 3,971,065, 20 July 1976. [Google Scholar]
- Daly, I.; How, M.; Partridge, J.; Temple, S.; Marshall, N.; Cronin, T.; Roberts, N. Dynamic polarization vision in mantis shrimps. Nat. Commun. 2016, 7, 12140. [Google Scholar] [CrossRef] [PubMed]
- How, M. Polarization Anatomy of a Mantis Shrimp Eye. Available online: https://commons.wikimedia.org/wiki/File:Polarization_anatomy_of_a_mantis_shrimp_eye.png (accessed on 20 March 2024).
- Gimenez, Y. Characterization of Stokes Imaging Systems Using Micropolarizers Filters Arrays. Ph.D. Thesis, Université de Haute-Alsace, Mulhouse, France, 2022. [Google Scholar]
- Powell, S.B.; Gruev, V. Calibration methods for division-of-focal-plane polarimeters. Opt. Express 2013, 21, 21039–21055. [Google Scholar] [CrossRef] [PubMed]
- Hagen, N.; Shibata, S.; Otani, Y. Calibration and performance assessment of microgrid polarization cameras. Opt. Eng. 2019, 58, 082408. [Google Scholar] [CrossRef]
- Fei, H.; Li, F.M.; Chen, W.C.; Zhang, R.; Chen, C.S. Calibration method for division of focal plane polarimeters. Appl. Opt. 2018, 57, 4992–4996. [Google Scholar] [CrossRef] [PubMed]
- Gimenez, Y.; Lapray, P.J.; Foulonneau, A.; Bigué, L. Calibration algorithms for polarization filter array camera: Survey and evaluation. J. Electron. Imaging 2020, 29, 041011. [Google Scholar] [CrossRef]
- Wu, R.; Zhao, Y.; Li, N.; Kong, S.G. Polarization image demosaicking using polarization channel difference prior. Opt. Express 2021, 29, 22066–22079. [Google Scholar] [CrossRef] [PubMed]
- Lane, C.; Rode, D.; Rösgen, T. Calibration of a polarization image sensor and investigation of influencing factors. Appl. Opt. 2022, 61, C37–C45. [Google Scholar] [CrossRef]
- Mihoubi, S.; Lapray, P.J.; Bigué, L. Survey of Demosaicking Methods for Polarization Filter Array Images. Sensors 2018, 18, 3688. [Google Scholar] [CrossRef]
- Li, N.; Zhao, Y.; Pan, Q.; Kong, S.G. Demosaicking DoFP images using Newton’s polynomial interpolation and polarization difference model. Opt. Express 2019, 27, 1376–1391. [Google Scholar] [CrossRef] [PubMed]
- Morimatsu, M.; Monno, Y.; Tanaka, M.; Okutomi, M. Monochrome and Color Polarization Demosaicking Based on Intensity-Guided Residual Interpolation. IEEE Sens. J. 2021, 21, 26985–26996. [Google Scholar] [CrossRef]
- Pistellato, M.; Bergamasco, F.; Fatima, T.; Torsello, A. Deep Demosaicing for Polarimetric Filter Array Cameras. IEEE Trans. Image Process. 2022, 31, 2017–2026. [Google Scholar] [CrossRef]
- Li, N.; Zhao, Y.; Pan, Q.; Kong, S.G.; Chan, J.C.W. Full-time monocular road detection using zero-distribution prior of angle of polarization. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XXV 16. Springer: Berlin/Heidelberg, Germany, 2020; pp. 457–473. [Google Scholar] [CrossRef]
- Blin, R.; Ainouz, S.; Canu, S.; Meriaudeau, F. Multimodal Polarimetric And Color Fusion For Road Scene Analysis In Adverse Weather Conditions. In Proceedings of the 2021 IEEE International Conference on Image Processing (ICIP), Anchorage, AK, USA, 19–22 September 2021; pp. 3338–3342. [Google Scholar] [CrossRef]
- Courtier, G.; Adam, R.; Lapray, P.J.; Pecheur, E.; Changey, S.; Lauffenburger, J.P. Image-based navigation system using skylight polarization for an unmanned ground vehicle. In Unmanned Systems Technology XXIV; SPIE Defense + Commercial Sensing, Orlando, FL, USA; SPIE: Bellingham, WA, USA, 2022; Volume 12124. [Google Scholar] [CrossRef]
- Onuma, T.; Otani, Y. A development of two-dimensional birefringence distribution measurement system with a sampling rate of 1.3MHz. Opt. Commun. 2014, 315, 69–73. [Google Scholar] [CrossRef]
- Wu, X.; Pankow, M.; Onuma, T.; Huang, H.Y.S.; Peters, K. Comparison of High-Speed Polarization Imaging Methods for Biological Tissues. Sensors 2022, 22, 8000. [Google Scholar] [CrossRef]
- Qi, J.; He, C.; Elson, D.S. Real time complete Stokes polarimetric imager based on a linear polarizer array camera for tissue polarimetric imaging. Biomed. Opt. Express 2017, 8, 4933–4946. [Google Scholar] [CrossRef]
- Myhre, G.; Hsu, W.L.; Peinado, A.; LaCasse, C.; Brock, N.; Chipman, R.A.; Pau, S. Liquid crystal polymer full-stokes division of focal plane polarimeter. Opt. Express 2012, 20, 27393–27409. [Google Scholar] [CrossRef]
- LeMaster, D.A.; Hirakawa, K. Improved microgrid arrangement for integrated imaging polarimeters. Opt. Lett. 2014, 39, 1811–1814. [Google Scholar] [CrossRef]
- Alenin, A.S.; Vaughn, I.J.; Tyo, J.S. Optimal bandwidth micropolarizer arrays. Opt. Lett. 2017, 42, 458–461. [Google Scholar] [CrossRef]
- Alenin, A.S.; Vaughn, I.J.; Tyo, J.S. Optimal bandwidth and systematic error of full-Stokes micropolarizer arrays. Appl. Opt. 2018, 57, 2327–2336. [Google Scholar] [CrossRef]
- Hoover, B.G.; Rugely, D.A.; Francis, C.M.; Zeira, G.; Gamiz, V.L. Bistatic laser polarimeter calibrated to 1% at visible-SWIR wavelengths. Opt. Express 2016, 24, 19881–19894. [Google Scholar] [CrossRef] [PubMed]
- Boulbry, B.; Ramella-Roman, J.C.; Germer, T.A. Improved method for calibrating a Stokes polarimeter. Appl. Opt. 2007, 46, 8533–8541. [Google Scholar] [CrossRef]
- Compain, E.; Poirier, S.; Drevillon, B. General and self-consistent method for the calibration of polarization modulators, polarimeters, and Mueller-matrix ellipsometers. Appl. Opt. 1999, 38, 3490–3502. [Google Scholar] [CrossRef]
- Mu, T.; Bao, D.; Zhang, C.; Chen, Z.; Song, J. Optimal reference polarization states for the calibration of general Stokes polarimeters in the presence of noise. Opt. Commun. 2018, 418, 120–128. [Google Scholar] [CrossRef]
- Goudail, F. Noise minimization and equalization for Stokes polarimeters in the presence of signal-dependent Poisson shot noise. Opt. Lett. 2009, 34, 647–649. [Google Scholar] [CrossRef] [PubMed]
- Roussel, S.; Boffety, M.; Goudail, F. Polarimetric precision of micropolarizer grid-based camera in the presence of additive and Poisson shot noise. Opt. Express 2018, 26, 29968–29982. [Google Scholar] [CrossRef] [PubMed]
- Giménez, Y.; Lapray, P.J.; Foulonneau, A.; Bigué, L. Calibration for polarization filter array cameras: Recent advances. In Proceedings of the Fourteenth International Conference on Quality Control by Artificial Vision, Mulhouse, France; SPIE: Bellingham, WA, USA, 2019; Volume 11172, pp. 297–302. [Google Scholar] [CrossRef]
- Morel, O.; Seulin, R.; Fofi, D. Handy method to calibrate division-of-amplitude polarimeters for the first three Stokes parameters. Opt. Express 2016, 24, 13634–13646. [Google Scholar] [CrossRef]
- Rodriguez, J.; Lew-Yan-Voon, L.; Martins, R.; Morel, O. A Practical Calibration Method for RGB Micro-Grid Polarimetric Cameras. IEEE Robot. Autom. Lett. 2022, 7, 9921–9928. [Google Scholar] [CrossRef]
- Le Teurnier, B.; Li, N.; Boffety, M.; Goudail, F. Definition of an error map for DoFP polarimetric images and its application to retardance calibration. Opt. Express 2022, 30, 9534–9547. [Google Scholar] [CrossRef]
- Tyo, J.S.; LaCasse, C.F.; Ratliff, B.M. Total elimination of sampling errors in polarization imagery obtained with integrated microgrid polarimeters. Opt. Lett. 2009, 34, 3187–3189. [Google Scholar] [CrossRef]
- Ratliff, B.M.; LaCasse, C.F.; Scott Tyo, J. Interpolation strategies for reducing IFOV artifacts in microgrid polarimeter imagery. Opt. Express 2009, 17, 9112–9125. [Google Scholar] [CrossRef] [PubMed]
- Le Teurnier, B.; Boffety, M.; Goudail, F. Error model for linear DoFP imaging systems perturbed by spatially varying polarization states. Appl. Opt. 2022, 61, 7273–7282. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Gruev, V. Bilinear and bicubic interpolation methods for division of focal plane polarimeters. Opt. Express 2011, 19, 26161–26173. [Google Scholar] [CrossRef] [PubMed]
- Ratliff, B.M.; LaCasse, C.F.; Tyo, J.S. Adaptive strategy for demosaicing microgrid polarimeter imagery. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; pp. 1–9. [Google Scholar] [CrossRef]
- Zhang, J.; Luo, H.; Hui, B.; Chang, Z. Image interpolation for division of focal plane polarimeters with intensity correlation. Opt. Express 2016, 24, 20799–20807. [Google Scholar] [CrossRef] [PubMed]
- Morimatsu, M.; Monno, Y.; Tanaka, M.; Okutomi, M. Monochrome And Color Polarization Demosaicking Using Edge-Aware Residual Interpolation. In Proceedings of the 2020 IEEE International Conference on Image Processing (ICIP), Abu Dhabi, United Arab Emirates, 25–28 October 2020; pp. 2571–2575. [Google Scholar] [CrossRef]
- Ratliff, B.M.; Tyo, J.S.; Black, W.T.; LaCasse, C.F. Exploiting motion-based redundancy to enhance microgrid polarimeter imagery. In Polarization Science and Remote Sensing IV, Proceedings of SPIE Optical Engineering + Applications Symposium; Shaw, J.A., Tyo, J.S., Eds.; SPIE: Bellingham, WA, USA, 2009; Volume 7461, p. 74610K. [Google Scholar] [CrossRef]
- Hardie, R.C.; LeMaster, D.A.; Ratliff, B.M. Super-resolution for imagery from integrated microgrid polarimeters. Opt. Express 2011, 19, 12937–12960. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Luo, H.; Liang, R.; Ahmed, A.; Zhang, X.; Hui, B.; Chang, Z. Sparse representation-based demosaicing method for microgrid polarimeter imagery. Opt. Lett. 2018, 43, 3265–3268. [Google Scholar] [CrossRef]
- Wen, S.; Zheng, Y.; Lu, F.; Zhao, Q. Convolutional demosaicing network for joint chromatic and polarimetric imagery. Opt. Lett. 2019, 44, 5646–5649. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, V.; Tanaka, M.; Monno, Y.; Okutomi, M. Two-Step Color-Polarization Demosaicking Network. In Proceedings of the 2022 IEEE International Conference on Image Processing (ICIP), Bordeaux, France, 16–19 October 2022; pp. 1011–1015. [Google Scholar] [CrossRef]
- Smith, M.; Woodruff, J.; Howe, J. Beam wander considerations in imaging polarimetry. In Polarization: Measurement, Analysis, and Remote Sensing II, Proceedings of the SPIE’s International Symposium on Optical Science, Engineering, and Instrumentation, Denver, CO, USA; SPIE: Bellingham, WA, USA, 1999; Volume 3754, p. 3754. [Google Scholar] [CrossRef]
- Guizar-Sicairos, M.; Thurman, S.T.; Fienup, J.R. Efficient subpixel image registration algorithms. Opt. Lett. 2008, 33, 156–158. [Google Scholar] [CrossRef] [PubMed]
- Bigué, L.; Foulonneau, A.; Lapray, P.J. Production of high-resolution reference polarization images from real world scenes. In Polarization Science and Remote Sensing XI, Proceedings of SPIE Optics + Photonics symposium, San Diego, CA, USA, 21–22 August 2023; SPIE: Bellingham, WA, USA, 2023; Volume 12690, p. 126900B. [Google Scholar] [CrossRef]
- Zeng, X.; Luo, Y.; Zhao, X.; Ye, W. An end-to-end fully-convolutional neural network for division of focal plane sensors to reconstruct S0, DoLP, and AoP. Opt. Express 2019, 27, 8566–8577. [Google Scholar] [CrossRef]
- Guyot, S.; Anastasiadou, M.; Deléchelle, E.; De Martino, A. Registration scheme suitable to Mueller matrix imaging for biomedical applications. Opt. Express 2007, 15, 7393–7400. [Google Scholar] [CrossRef]
- Marconnet, P.; Gendre, L.; Foulonneau, A.; Bigué, L. Cancellation of motion artifacts caused by a division-of-time polarimeter. In Polarization Science and Remote Sensing V, Proceedings of SPIE Optical Engineering + Applications Symposium, San Diego, CA, USA, 21–22 August 2011; Shaw, J.A., Tyo, J.S., Eds.; SPIE: Bellingham, WA, USA, 2011; Volume 8160, p. 81600M. [Google Scholar] [CrossRef]
- Goldstein, D.H.; Chipman, R.A. Error analysis of a Mueller matrix polarimeter. J. Opt. Soc. Am. A 1990, 7, 693–700. [Google Scholar] [CrossRef]
- Sabatke, D.S.; Descour, M.R.; Dereniak, E.L.; Sweatt, W.C.; Kemme, S.A.; Phipps, G.S. Optimization of retardance for a complete Stokes polarimeter. Opt. Lett. 2000, 25, 802–804. [Google Scholar] [CrossRef] [PubMed]
- Goudail, F.; Bénière, A. Estimation precision of the degree of linear polarization and of the angle of polarization in the presence of different sources of noise. Appl. Opt. 2010, 49, 683–693. [Google Scholar] [CrossRef] [PubMed]
- Tibbs, A.B.; Daly, I.M.; Bull, D.R.; Roberts, N.W. Noise creates polarization artefacts. Bioinspir. Biomim. 2018, 13, 015005. [Google Scholar] [CrossRef] [PubMed]
- Li, N.; Le Teurnier, B.; Boffety, M.; Goudail, F.; Zhao, Y.; Pan, Q. No-Reference Physics-Based Quality Assessment of Polarization Images and Its Application to Demosaicking. IEEE Trans. Image Process. 2021, 30, 8983–8998. [Google Scholar] [CrossRef] [PubMed]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image Denoising by Sparse 3-D Transform-Domain Collaborative Filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef] [PubMed]
- Tibbs, A.B.; Daly, I.M.; Roberts, N.W.; Bull, D.R. Denoising imaging polarimetry by adapted BM3D method. J. Opt. Soc. Am. A 2018, 35, 690–701. [Google Scholar] [CrossRef]
- Shibata, S.; Hagen, N.; Otani, Y. Robust full Stokes imaging polarimeter with dynamic calibration. Opt. Lett. 2019, 44, 891–894. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Peng, Q.; Yi, C.; Kong, S.G. Multiband Polarization Imaging. J. Sens. 2016, 2016, 5985673. [Google Scholar] [CrossRef]
- Farlow, C.A.; Chenault, D.B.; Pezzaniti, J.L.; Spradley, K.D.; Gulley, M.G. Imaging polarimeter development and applications. In Polarization Analysis and Measurement IV, Proceedings of the International Symposium on Optical Science and Technology, San Diego, CA, USA, 29 July–3 August 2001; SPIE: Bellingham, WA, USA, 2002; Volume 4481, pp. 118–125. [Google Scholar] [CrossRef]
- Alouini, M.; Goudail, F.; Réfrégier, P.; Grisard, A.; Lallier, E.; Dolfi, D. Multispectral polarimetric imaging with coherent illumination: Towards higher image contrast. In Polarization: Measurement, Analysis, and Remote Sensing VI, Proceedings of the Defense and Security Symposium, Orlando, FL, USA, 15 April 2004; Goldstein, D.H., Chenault, D.B., Eds.; SPIE: Bellingham, WA, USA, 2004; Volume 5432, pp. 133–144. [Google Scholar] [CrossRef]
- Twede, D. Single Camera Color and Infrared Polarimetric Imaging. US Patent 8,411,146, 2 April 2013. [Google Scholar]
- Spote, A.; Lapray, P.J.; Thomas, J.B.; Farup, I. Joint demosaicing of colour and polarisation from filter arrays. In Proceedings of the Color and Imaging Conference; Society for Imaging Science and Technology: Paris, France, 2021; Volume 2021, pp. 288–293. [Google Scholar]
- Liu, J.; Duan, J.; Hao, Y.; Chen, G.; Zhang, H.; Zheng, Y. Polarization image demosaicing and RGB image enhancement for a color polarization sparse focal plane array. Opt. Express 2023, 31, 23475–23490. [Google Scholar] [CrossRef]
- Tu, X.; Spires, O.J.; Tian, X.; Brock, N.; Liang, R.; Pau, S. Division of amplitude RGB full-Stokes camera using micro-polarizer arrays. Opt. Express 2017, 25, 33160–33175. [Google Scholar] [CrossRef]
- Kurita, T.; Kondo, Y.; Sun, L.; Moriuchi, Y. Simultaneous Acquisition of High Quality RGB Image and Polarization Information using a Sparse Polarization Sensor. In Proceedings of the 2023 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 2–7 January 2023; pp. 178–188. [Google Scholar] [CrossRef]
- Zou, X.; Gong, G.; Lin, Y.; Fu, B.; Wang, S.; Zhu, S.; Wang, Z. Metasurface-based polarization color routers. Opt. Lasers Eng. 2023, 163, 107472. [Google Scholar] [CrossRef]
- Garcia, M.; Edmiston, C.; Marinov, R.; Vail, A.; Gruev, V. Bio-inspired color-polarization imager for real-time in situ imaging. Optica 2017, 4, 1263–1271. [Google Scholar] [CrossRef]
- Garcia, M.; Davis, T.; Blair, S.; Cui, N.; Gruev, V. Bioinspired polarization imager with high dynamic range. Optica 2018, 5, 1240–1246. [Google Scholar] [CrossRef]
- Altaqui, A.; Sen, P.; Schrickx, H.; Rech, J.; Lee, J.W.; Escuti, M.; You, W.; Kim, B.J.; Kolbas, R.; O’Connor, B.T.; et al. Mantis shrimp–inspired organic photodetector for simultaneous hyperspectral and polarimetric imaging. Sci. Adv. 2021, 7, eabe3196. [Google Scholar] [CrossRef] [PubMed]
- Han, F.; Mu, T.; Li, H.; Tuniyazi, A. Deep image prior plus sparsity prior: Toward single-shot full-Stokes spectropolarimetric imaging with a multiple-order retarder. Adv. Photonics Nexus 2023, 2, 036009. [Google Scholar] [CrossRef]
- Schechner, Y.Y.; Narasimhan, S.G.; Nayar, S.K. Polarization-based vision through haze. Appl. Opt. 2003, 42, 511–525. [Google Scholar] [CrossRef] [PubMed]
- Geng, Y.; Kizhakidathazhath, R.; Lagerwall, J.P.F. Encoding Hidden Information onto Surfaces Using Polymerized Cholesteric Spherical Reflectors. Adv. Funct. Mater. 2021, 31, 2100399. [Google Scholar] [CrossRef]
- Tu, X.; McEldowney, S.; Zou, Y.; Smith, M.; Guido, C.; Brock, N.; Miller, S.; Jiang, L.; Pau, S. Division of focal plane red–green–blue full-Stokes imaging polarimeter. Appl. Opt. 2020, 59, G33–G40. [Google Scholar] [CrossRef]
- Maeda, R. Polanalyser. Available online: https://github.com/elerac/polanalyser (accessed on 17 April 2024).
- Rodriguez, J.; Lew-Yan-Voon, L.F.C.; Martins, R.; Morel, O. Pola4All: Survey of polarimetric applications and an open-source toolkit to analyze polarization. J. Electron. Imaging 2024, 33, 010901. [Google Scholar] [CrossRef]
- Moody, L.C.A.B. The pfund sky compass. Navig. J. Inst. Navig. 1950, 2, 234–239. [Google Scholar] [CrossRef]
- Aycock, T.; Lompado, A.; Wolz, T.; Chenault, D. Passive optical sensing of atmospheric polarization for GPS denied operations. In Proceedings of the Sensors and Systems for Space Applications IX; SPIE: St Bellingham, WA, USA, 2016; Volume 9838, pp. 266–279. [Google Scholar] [CrossRef]
- Aycock, T.M.; Chenault, D.; Lompado, A.; Pezzaniti, J.L. Sky Polarization and Sun Sensor System and Method. US Patent 9,423,484, 23 August 2016. [Google Scholar]
- Aycock, T.M.; Chenault, D.B.; Lompado, A.; Pezzaniti, J.L. Sky Polarization and Sun Sensor System and Method. US Patent 9,989,625, 5 June 2018. [Google Scholar]
- Eshelman, L.M.; Smith, A.M.; Smith, K.M.; Chenault, D.B. Unique navigation solution utilizing sky polarization signatures. In Proceedings of the Polarization: Measurement, Analysis, and Remote Sensing XV; SPIE: St Bellingham, WA, USA, 2022; Volume 12112, p. 1211203. [Google Scholar] [CrossRef]
- Hamaoui, M. Polarized skylight navigation. Appl. Opt. 2017, 56, B37–B46. [Google Scholar] [CrossRef] [PubMed]
- Dupeyroux, J.; Viollet, S.; Serres, J.R. Bio-inspired celestial compass yields new opportunities for urban localization. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphaël, France, 15–18 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 881–886. [Google Scholar] [CrossRef]
- Courtier, G.; Lapray, P.J.; Adam, R.; Changey, S.; Lauffenburger, J.P. Ground Vehicle Navigation Based on the Skylight Polarization. In Proceedings of the 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 24–27 April 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1373–1379. [Google Scholar] [CrossRef]
- Stürzl, W.; Carey, N. A Fisheye Camera System for Polarisation Detection on UAVs. In Proceedings of the Computer Vision—ECCV 2012. Workshops and Demonstrations, Florence, Italy, 7–13 October 2012; Fusiello, A., Murino, V., Cucchiara, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 431–440. [Google Scholar] [CrossRef]
- Gkanias, E.; Mitchell, R.; Stankiewicz, J.; Khan, S.R.; Mitra, S.; Webb, B. Celestial compass sensor mimics the insect eye for navigation under cloudy and occluded skies. Commun. Eng. 2023, 2, 82. [Google Scholar] [CrossRef]
- Fan, C.; Hu, X.; He, X.; Zhang, L.; Wang, Y. Multicamera polarized vision for the orientation with the skylight polarization patterns. Opt. Eng. 2018, 57, 043101. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, R.; Liu, Z.; Chu, J. A skylight orientation sensor based on S-waveplate and linear polarizer for autonomous navigation. IEEE Sens. J. 2021, 21, 23551–23557. [Google Scholar] [CrossRef]
- Yang, J.; Du, T.; Niu, B.; Li, C.; Qian, J.; Guo, L. A bionic polarization navigation sensor based on polarizing beam splitter. IEEE Access 2018, 6, 11472–11481. [Google Scholar] [CrossRef]
- Zhao, H.; Xu, W. A bionic polarization navigation sensor and its calibration method. Sensors 2016, 16, 1223. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Xu, W.; Zhang, Y.; Li, X.; Zhang, H.; Xuan, J.; Jia, B. Polarization patterns under different sky conditions and a navigation method based on the symmetry of the AOP map of skylight. Opt. Express 2018, 26, 28589–28603. [Google Scholar] [CrossRef] [PubMed]
- Guan, L.; Li, S.; Zhai, L.; Liu, S.; Liu, H.; Lin, W.; Cui, Y.; Chu, J.; Xie, H. Study on skylight polarization patterns over the ocean for polarized light navigation application. Appl. Opt. 2018, 57, 6243–6251. [Google Scholar] [CrossRef]
- Guan, L.; Zhai, L.; Cai, H.; Zhang, P.; Li, Y.; Chu, J.; Jin, R.; Xie, H. Study on displacement estimation in low illumination environment through polarized contrast-enhanced optical flow method for polarization navigation applications. Optik 2020, 210, 164513. [Google Scholar] [CrossRef]
- He, R.; Hu, X.; Zhang, L.; He, X.; Han, G. A combination orientation compass based on the information of polarized skylight/geomagnetic/MIMU. IEEE Access 2019, 8, 10879–10887. [Google Scholar] [CrossRef]
- Guo, X.; Chu, J.; Wang, Y.; Wan, Z.; Li, J.; Lin, M. Formation experiment with heading angle reference using sky polarization pattern at twilight. Appl. Opt. 2019, 58, 9331–9337. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Chu, J.; Zhang, R.; Li, J.; Guo, X.; Lin, M. A bio-inspired polarization sensor with high outdoor accuracy and central-symmetry calibration method with integrating sphere. Sensors 2019, 19, 3448. [Google Scholar] [CrossRef] [PubMed]
- Liang, H.; Bai, H.; Liu, N.; Sui, X. Polarized skylight compass based on a soft-margin support vector machine working in cloudy conditions. Appl. Opt. 2020, 59, 1271–1279. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Chu, J.; Zhang, R.; Chen, J.; Wang, Y. Bio-inspired attitude measurement method using a polarization skylight and a gravitational field. Appl. Opt. 2020, 59, 2955–2962. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Liu, X.; Zhang, Q.; Du, T.; Guo, L. Global autonomous positioning in GNSS-challenged environments: A bioinspired strategy by polarization pattern. IEEE Trans. Ind. Electron. 2020, 68, 6308–6317. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, P.; Yang, J.; Wang, S.; Zhang, Q.; Wang, Y. Clear night sky polarization patterns under the super blue blood moon. Atmosphere 2020, 11, 372. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, J.; Wang, S.; Liu, X.; Wang, Y.; Yu, X. A self-contained interactive iteration positioning and orientation coupled navigation method based on skylight polarization. Control Eng. Pract. 2021, 111, 104810. [Google Scholar] [CrossRef]
- Wan, Z.; Zhao, K.; Chu, J. A Novel Attitude Measurement Method Based on Forward Polarimetric Imaging of Skylight. IEEE Trans. Instrum. Meas. 2021, 70, 5007709. [Google Scholar] [CrossRef]
- Strutt, J. LVIII. On the scattering of light by small particles. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1871, 41, 447–454. [Google Scholar] [CrossRef]
- Strutt, J. XV. On the light from the sky, its polarization and colour. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1871, 41, 107–120. [Google Scholar] [CrossRef]
- Coulson, K.L. Characteristics of the radiation emerging from the top of a rayleigh atmosphere—I: Intensity and polarization. Planet. Space Sci. 1959, 1, 265–276. [Google Scholar] [CrossRef]
- Coulson, K.L. Polarization and Intensity of Light in the Atmosphere; A. Deepak Pub.: Hampton, VA, USA, 1988. [Google Scholar] [CrossRef]
- Gál, J.; Horváth, G.; Barta, A.; Wehner, R. Polarization of the moonlit clear night sky measured by full-sky imaging polarimetry at full Moon: Comparison of the polarization of moonlit and sunlit skies. J. Geophys. Res. Atmos. 2001, 106, 22647–22653. [Google Scholar] [CrossRef]
- Brines, M.L.; Gould, J.L. Skylight polarization patterns and animal orientation. J. Exp. Biol. 1982, 96, 69–91. [Google Scholar] [CrossRef]
- Eshelman, L.M.; Shaw, J.A. Visualization of all-sky polarization images referenced in the instrument, scattering, and solar principal planes. Opt. Eng. 2019, 58, 082418. [Google Scholar] [CrossRef]
- Berry, M.; Dennis, M.; Lee, R. Polarization singularities in the clear sky. New J. Phys. 2004, 6, 162. [Google Scholar] [CrossRef]
- Wang, X.; Gao, J.; Fan, Z.; Roberts, N.W. An analytical model for the celestial distribution of polarized light, accounting for polarization singularities, wavelength and atmospheric turbidity. J. Opt. 2016, 18, 065601. [Google Scholar] [CrossRef]
- Moutenet, A.; Poughon, L.; Toulon, B.; Serres, J.R.; Viollet, S. OpenSky: A modular and open-source simulator of sky polarization measurements. IEEE Trans. Instrum. Meas. 2024, 73, 5014716. [Google Scholar] [CrossRef]
- Cornet, C.; C-Labonnote, L.; Szczap, F. Three-dimensional polarized Monte Carlo atmospheric radiative transfer model (3DMCPOL): 3D effects on polarized visible reflectances of a cirrus cloud. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 174–186. [Google Scholar] [CrossRef]
- Sheppard, P.A. Tables Related to Radiation Emerging from a Planetary Atmosphere with Rayleigh Scattering K. L. Coulson, J. V. Dave; Z. Sekera (8½ in. × 11 in., xii + 548 pp., University of California Press, 1960). Geophys. J. Int. 1961, 5, 87. [Google Scholar] [CrossRef]
- Horváth, G.; Bernáth, B.; Suhai, B.; Barta, A.; Wehner, R. First observation of the fourth neutral polarization point in the atmosphere. JOSA A 2002, 19, 2085–2099. [Google Scholar] [CrossRef] [PubMed]
- Horváth, G.; Varjú, D. Polarized Light in Animal Vision: Polarization Patterns in Nature; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2004. [Google Scholar] [CrossRef]
- Yan, L.; Yang, B.; Zhang, F.; Xiang, Y.; Chen, W. Atmospheric Remote Sensing 2: Neutral Point Areas of Atmospheric Polarization and Land-Atmosphere Parameter Separation. In Polarization Remote Sensing Physics; Springer: Singapore, 2020; pp. 211–242. [Google Scholar] [CrossRef]
- Li, G.; Zhang, Y.; Fan, S.; Wang, Y.; Yu, F. Robust Heading Measurement Based on Improved Berry Model for Bionic Polarization Navigation. IEEE Trans. Instrum. Meas. 2022, 72, 8500211. [Google Scholar] [CrossRef]
- Jue, W.; Pengwei, H.; Jianqiang, Q.; Lei, G. Confocal Ellipse Hough Transform for Polarization Compass in the Nonideal Atmosphere. IEEE Trans. Instrum. Meas. 2023, 72, 5010108. [Google Scholar] [CrossRef]
- Fan, Z.; Wang, X.; Jin, H.; Wang, C.; Pan, N.; Hua, D. Neutral point detection using the AOP of polarized skylight patterns. Opt. Express 2021, 29, 5665–5676. [Google Scholar] [CrossRef] [PubMed]
- Bellver, C. Influence of particulate pollution on the positions of neutral points in the sky at Seville (Spain). Atmos. Environ. (1967) 1987, 21, 699–702. [Google Scholar] [CrossRef]
- Pan, P.; Wang, X.; Yang, T.; Pu, X.; Wang, W.; Bao, C.; Gao, J. High-similarity analytical model of skylight polarization pattern based on position variations of neutral points. Opt. Express 2023, 31, 15189–15203. [Google Scholar] [CrossRef] [PubMed]
- Labhart, T. Polarization-opponent interneurons in the insect visual system. Nature 1988, 331, 435–437. [Google Scholar] [CrossRef]
- Lambrinos, D.; Kobayashi, H.; Pfeifer, R.; Maris, M.; Labhart, T.; Wehner, R. An autonomous agent navigating with a polarized light compass. Adapt. Behav. 1997, 6, 131–161. [Google Scholar] [CrossRef]
- Dupeyroux, J.; Viollet, S.; Serres, J.R. Polarized skylight-based heading measurements: A bio-inspired approach. J. R. Soc. Interface 2019, 16, 20180878. [Google Scholar] [CrossRef]
- Wang, Y.; Chu, J.; Zhang, R.; Wang, L.; Wang, Z. A novel autonomous real-time position method based on polarized light and geomagnetic field. Sci. Rep. 2015, 5, 9725. [Google Scholar] [CrossRef]
- Zhi, W.; Chu, J.; Li, J.; Wang, Y. A novel attitude determination system aided by polarization sensor. Sensors 2018, 18, 158. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Du, T.; Liu, X.; Niu, B.; Guo, L. Method and implementation of a bioinspired polarization-based attitude and heading reference system by integration of polarization compass and inertial sensors. IEEE Trans. Ind. Electron. 2019, 67, 9802–9812. [Google Scholar] [CrossRef]
- Qiu, Z.; Wang, S.; Hu, P.; Guo, L. Outlier-Robust Extended Kalman Filtering for Bioinspired Integrated Navigation System. IEEE Trans. Autom. Sci. Eng. 2023. Early Access. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, Y.; Wu, X.; Dong, H.; Wang, C.; Tang, J.; Shen, C.; Liu, J. Attitude-Induced error modeling and compensation with GRU networks for the polarization compass during UAV orientation. Measurement 2022, 190, 110734. [Google Scholar] [CrossRef]
- Liang, H.; Bai, H.; Zhou, T. Exploration of Whether Skylight Polarization Patterns Contain Three-dimensional Attitude Information. arXiv 2020, arXiv:2012.09154. [Google Scholar] [CrossRef]
- Pan, S.; Lin, J.; Zhang, Y.; Hu, B.; Liu, X.; Yu, Q. Image-registration-based solar meridian detection for accurate and robust polarization navigation. Opt. Express 2024, 32, 1357–1370. [Google Scholar] [CrossRef] [PubMed]
- Fan, C.; Hu, X.; He, X.; Zhang, L.; Lian, J. Integrated polarized skylight sensor and MIMU with a metric map for urban ground navigation. IEEE Sens. J. 2017, 18, 1714–1722. [Google Scholar] [CrossRef]
- Collett, M.; Collett, T.S.; Bisch, S.; Wehner, R. Local and global vectors in desert ant navigation. Nature 1998, 394, 269–272. [Google Scholar] [CrossRef]
- Zhou, W.; Fan, C.; He, X.; Hu, X.; Fan, Y.; Wu, X.; Shang, H. Integrated bionic polarized vision/vins for goal-directed navigation and homing in unmanned ground vehicle. IEEE Sens. J. 2021, 21, 11232–11241. [Google Scholar] [CrossRef]
- Han, G.; Hu, X.; Lian, J.; He, X.; Zhang, L.; Wang, Y.; Dong, F. Design and Calibration of a Novel Bio-Inspired Pixelated Polarized Light Compass. Sensors 2017, 17, 2623. [Google Scholar] [CrossRef]
- Liu, X.; Yang, J.; Guo, L.; Yu, X.; Wang, S. Design and calibration model of a bioinspired attitude and heading reference system based on compound eye polarization compass. Bioinspir. Biomim. 2021, 16, 016001. [Google Scholar] [CrossRef]
- Ren, H.; Yang, J.; Liu, X.; Huang, P.; Guo, L. Sensor Modeling and Calibration Method Based on Extinction Ratio Error for Camera-Based Polarization Navigation Sensor. Sensors 2020, 20, 3779. [Google Scholar] [CrossRef] [PubMed]
- Bai, X.; Zhu, Z.; Schwing, A.; Forsyth, D.; Gruev, V. Angle of polarization calibration for omnidirectional polarization cameras. Opt. Express 2023, 31, 6759–6769. [Google Scholar] [CrossRef]
- Urquhart, B.; Kurtz, B.; Kleissl, J. Sky camera geometric calibration using solar observations. Atmos. Meas. Tech. 2016, 9, 4279–4294. [Google Scholar] [CrossRef]
- Jin, H.; Wang, X.; Fan, Z.; Pan, N. Linear solution method of solar position for polarized light navigation. IEEE Sens. J. 2021, 21, 15042–15052. [Google Scholar] [CrossRef]
- Poughon, L.; Aubry, V.; Monnoyer, J.; Viollet, S.; Serres, J.R. A stand-alone polarimetric acquisition system for producing a long-term skylight dataset. In Proceedings of the 2023 IEEE SENSORS, IEEE. Vienna, Austria, 29 October–1 November 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, X.; Lian, J.; Zhang, L.; He, X. Bionic orientation and visual enhancement with a novel polarization camera. IEEE Sens. J. 2017, 17, 1316–1324. [Google Scholar] [CrossRef]
- Liu, B.; Fan, Z.; Wang, X. Solar position acquisition method for polarized light navigation based on ∞ characteristic model of polarized skylight pattern. IEEE Access 2020, 8, 56720–56729. [Google Scholar] [CrossRef]
- Guan, L.; Liu, S.; Chu, J.; Zhang, R.; Chen, Y.; Li, S.; Zhai, L.; Li, Y.; Xie, H. A novel algorithm for estimating the relative rotation angle of solar azimuth through single-pixel rings from polar coordinate transformation for imaging polarization navigation sensors. Optik 2019, 178, 868–878. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, X.; Cao, Y.; Liu, H.; Liu, Z. Robust sky light polarization detection with an S-wave plate in a light field camera. Appl. Opt. 2016, 55, 3518–3525. [Google Scholar] [CrossRef] [PubMed]
- Lyot, B. Le filtre monochromatique polarisant et ses applications en physique solaire. Ann. D’Astrophysique 1944, 7, 31. [Google Scholar]
- Poughon, L.; Mafrica, S.; Monnoyer, J.; Pradere, L.; Serres, J.R.; Viollet, S. Procédé et système pour déterminer des données caractérisant un cap Suivi par un véhicule automobile à un instant courant. FR3128528B1, 21 October 2021. Available online: https://data.inpi.fr/brevets/FR3128528?q=FR3128528#FR3128528 (accessed on 19 March 2024).
- Poughon, L.; Aubry, V.; Monnoyer, J.; Viollet, S.; Serres, J.R. Skylight polarization heading sensor using waveplate retardance shift with incidence. In Proceedings of the Journée des Jeunes Chercheurs en Robotique 2023 (JJCR’23), Moliets-et-Maâ, France, 15–16 October 2023; Available online: https://hal.science/hal-04521170/ (accessed on 19 March 2024).
- Born, M.; Wolf, E. Principles of Optics, 7th ed.; Elsevier: Cambridge, MA, USA, 1999. [Google Scholar]
- Labhart, T. How polarization-sensitive interneurones of crickets perform at low degrees of polarization. J. Exp. Biol. 1996, 199, 1467–1475. [Google Scholar] [CrossRef]
- Sakura, M.; Lambrinos, D.; Labhart, T. Polarized Skylight Navigation in Insects: Model and Electrophysiology of e-Vector Coding by Neurons in the Central Complex. J. Neurophysiol. 2008, 99, 667–682. [Google Scholar] [CrossRef] [PubMed]
- Labhart, T. Can invertebrates see the e-vector of polarization as a separate modality of light? J. Exp. Biol. 2016, 219, 3844–3856. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Gao, J.; Fan, Z. Empirical corroboration of an earlier theoretical resolution to the UV paradox of insect polarized skylight orientation. Naturwissenschaften 2014, 101, 95–103. [Google Scholar] [CrossRef] [PubMed]
- Xian, Z.; Hu, X.; Lian, J.; Zhang, L.; Cao, J.; Wang, Y.; Ma, T. A Novel Angle Computation and Calibration Algorithm of Bio-Inspired Sky-Light Polarization Navigation Sensor. Sensors 2014, 14, 17068–17088. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.D.; Wang, C.H.; Pan, J.R.; Chen, J.B.; Song, C.L.; Li, L.L. The Error Analysis and the Error Calibration of the Bionic Polarized Light Compass. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020. [Google Scholar] [CrossRef]
- Gkanias, E.; Risse, B.; Mangan, M.; Webb, B. From skylight input to behavioural output: A computational model of the insect polarised light compass. PLoS Comput. Biol. 2019, 15, e1007123. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Yang, J.; Huang, P.; Liu, X.; Wang, S.; Guo, L. Bionic integrated positioning mechanism based on bioinspired polarization compass and inertial navigation system. Sensors 2021, 21, 1055. [Google Scholar] [CrossRef] [PubMed]
- Du, T.; Tian, C.; Yang, J.; Wang, S.; Liu, X.; Guo, L. An autonomous initial alignment and observability analysis for SINS with bio-inspired polarized skylight sensors. IEEE Sens. J. 2020, 20, 7941–7956. [Google Scholar] [CrossRef]
- Zhang, Q.; Yang, J.; Liu, X.; Guo, L. A bio-inspired navigation strategy fused polarized skylight and starlight for unmanned aerial vehicles. IEEE Access 2020, 8, 83177–83188. [Google Scholar] [CrossRef]
- Powell, S.B.; Garnett, R.; Marshall, J.; Rizk, C.; Gruev, V. Bioinspired polarization vision enables underwater geolocalization. Sci. Adv. 2018, 4, eaao6841. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, X.; Zhao, H.; Wang, C.; Tang, J.; Liu, J.; Shen, C. Seamless integration of polarization compass and inertial navigation data with a self-learning multi-rate residual correction algorithm. Measurement 2021, 170, 108694. [Google Scholar] [CrossRef]
- Yang, J.; Wang, J.; Wang, Y.; Hu, X. Algorithm design and experimental verification of a heading measurement system based on polarized light/inertial combination. Opt. Commun. 2021, 478, 126402. [Google Scholar] [CrossRef]
- Dou, Q.; Du, T.; Qiu, Z.; Wang, S.; Yang, J. An adaptive anti-disturbance navigation method for polarized skylight-based autonomous integrated navigation system. Measurement 2022, 202, 111847. [Google Scholar] [CrossRef]
- Li, G.; Zhang, Y.; Fan, S.; Liu, C.; Yu, F.; Wei, X.; Jin, W. Attitude and heading measurement based on adaptive complementary Kalman filter for PS/MIMU integrated system. Opt. Express 2024, 32, 9184–9200. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Zhang, L.; Fan, C.; Wang, M.; Wu, W. A MIMU/Polarized Camera/GNSS Integrated Navigation Algorithm for UAV Application. In Proceedings of the 2019 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 10–11 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–15. [Google Scholar] [CrossRef]
- Cao, S.; Gao, H.; You, J. In-Flight Alignment of Integrated SINS/GPS/Polarization/Geomagnetic Navigation System Based on Federal UKF. Sensors 2022, 22, 5985. [Google Scholar] [CrossRef] [PubMed]
- Shen, C.; Xiong, Y.; Zhao, D.; Wang, C.; Cao, H.; Song, X.; Tang, J.; Liu, J. Multi-rate strong tracking square-root cubature Kalman filter for MEMS-INS/GPS/polarization compass integrated navigation system. Mech. Syst. Signal Process. 2022, 163, 108146. [Google Scholar] [CrossRef]
- Du, T.; Zeng, Y.H.; Yang, J.; Tian, C.Z.; Bai, P.F. Multi-sensor fusion SLAM approach for the mobile robot with a bio-inspired polarised skylight sensor. IET Radar Sonar Navig. 2020, 14, 1950–1957. [Google Scholar] [CrossRef]
- Du, T.; Shi, S.; Zeng, Y.; Yang, J.; Guo, L. An integrated INS/LiDAR odometry/polarized camera pose estimation via factor graph optimization for sparse environment. IEEE Trans. Instrum. Meas. 2022, 71, 8501511. [Google Scholar] [CrossRef]
- Li, J.; Chu, J.; Zhang, R.; Hu, H.; Tong, K.; Li, J. Biomimetic navigation system using a polarization sensor and a binocular camera. JOSA A 2022, 39, 847–854. [Google Scholar] [CrossRef] [PubMed]
- Xia, L.; Liu, R.; Zhang, D.; Zhang, J. Polarized light-aided visual-inertial navigation system: Global heading measurements and graph optimization-based multi-sensor fusion. Meas. Sci. Technol. 2022, 33, 055111. [Google Scholar] [CrossRef]
- Kronland-Martinet, T.; Poughon, L.; Pasquinelli, M.; Duché, D.; Serres, J.R.; Viollet, S. SkyPole-A method for locating the north celestial pole from skylight polarization patterns. Proc. Natl. Acad. Sci. USA 2023, 120, e2304847120. [Google Scholar] [CrossRef]
- Emlen, S. The Ontogenetic Development of Orientation Capabilities. NASA Spec. Publ. 1972, 262, 191. [Google Scholar]
- Brines, M. Dynamic patterns of skylight polarization as clock and compass. J. Theor. Biol. 1980, 86, 507–512. [Google Scholar] [CrossRef] [PubMed]
- Waterman, T.H. Polarization patterns in submarine illumination. Science 1954, 120, 927–932. [Google Scholar] [CrossRef] [PubMed]
- Waterman, T.H. Reviving a neglected celestial underwater polarization compass for aquatic animals. Biol. Rev. 2006, 81, 111–115. [Google Scholar] [CrossRef] [PubMed]
- Hu, P.; Yang, J.; Guo, L.; Yu, X.; Li, W. Solar-tracking methodology based on refraction-polarization in Snell’s window for underwater navigation. Chin. J. Aeronaut. 2022, 35, 380–389. [Google Scholar] [CrossRef]
- Cheng, H.; Zhang, Q.; Wan, Z.; Zhang, Z.; Qin, J. Study on the polarization pattern induced by wavy water surfaces. Remote Sens. 2023, 15, 4565. [Google Scholar] [CrossRef]
- Lerner, A.; Sabbah, S.; Erlick, C.; Shashar, N. Navigation by light polarization in clear and turbid waters. Philos. Trans. R. Soc. B Biol. Sci. 2011, 366, 671–679. [Google Scholar] [CrossRef] [PubMed]
- Horváth, G.; Varjú, D. Underwater refraction-polarization patterns of skylight perceived by aquatic animals through Snell’s window of the flat water surface. Vis. Res. 1995, 35, 1651–1666. [Google Scholar] [CrossRef] [PubMed]
- Cronin, T.W.; Marshall, J. Patterns and properties of polarized light in air and water. Philos. Trans. R. Soc. B Biol. Sci. 2011, 366, 619–626. [Google Scholar] [CrossRef]
- Zhou, G.; Wang, J.; Xu, W.; Zhang, K.; Ma, Z. Polarization patterns of transmitted celestial light under wavy water surfaces. Remote Sens. 2017, 9, 324. [Google Scholar] [CrossRef]
- Bai, X.; Liang, Z.; Zhu, Z.; Schwing, A.; Forsyth, D.; Gruev, V. Polarization-based underwater geolocalization with deep learning. eLight 2023, 3, 15. [Google Scholar] [CrossRef]
- Cheng, H.; Chen, Q.; Zeng, X.; Yuan, H.; Zhang, L. The polarized light field enables underwater unmanned vehicle bionic autonomous navigation and automatic control. J. Mar. Sci. Eng. 2023, 11, 1603. [Google Scholar] [CrossRef]
- Zhang, T.; Yang, J.; Zhao, Q.; Liu, X.; Hu, P.; Yu, X.; Guo, L. Bio-Inspired Antagonistic Differential Polarization Algorithm for Heading Determination in Underwater Low-Light Environments. IEEE Trans. Ind. Inform. 2024, 20, 6542–6551. [Google Scholar] [CrossRef]
- Moutenet, A.; Serres, J.R.; Viollet, S. Ultraviolet vs. Visible Skylight Polarization Measurements. In Proceedings of the 2023 IEEE SENSORS, Vienna, Austria, 29 October–1 November 2023; IEEE: Vienna, Austria, 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Labhart, T. The electrophysiology of photoreceptors in different eye regions of the desert ant, Cataglyphis bicolor. J. Comp. Physiol. A 1986, 158, 1–7. [Google Scholar] [CrossRef]
- Liang, H.; Bai, H.; Hu, K.; Lv, X. Bioinspired Polarized Skylight Orientation Determination Artificial Neural Network. J. Bionic Eng. 2023, 20, 1141–1152. [Google Scholar] [CrossRef]
- Poughon, L.; Aubry, V.; Monnoyer, J.; Viollet, S.; Serres, J.R. A 2 Month-Long Annotated Skylight Polarization Images Database. Recherche Data Gouv, V1. 2024. Available online: https://entrepot.recherche.data.gouv.fr/dataset.xhtml?persistentId=doi:10.57745/9L2YUB (accessed on 19 March 2024).
- Freas, C.A.; Narendra, A.; Murray, T.; Cheng, K. Moonlight Polarisation Pattern Guides Nocturnal Bull Ants Home. bioRxiv 2023. bioRxiv:2023-12. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, L.; Yu, W.; Chen, T.; Fang, S. Heading determination of bionic polarization sensor based on night composite light field. IEEE Sens. J. 2023, 24, 909–919. [Google Scholar] [CrossRef]
- Chen, T.; Zhang, X.; Chi, X.; Hu, P.; Yu, X.; Wu, H.N.; Guo, L. An Autonomous Positioning Method Utilizing Feature Extraction from Polarized Moonlight. IEEE Sens. J. 2023. Early Access. [Google Scholar] [CrossRef]
- Wehner, R. Polarization vision—A uniform sensory capacity? J. Exp. Biol. 2001, 204, 2589–2596. [Google Scholar] [CrossRef] [PubMed]
- Schwind, R. Spectral regions in which aquatic insects see reflected polarized light. J. Comp. Physiol. A 1995, 177, 439–448. [Google Scholar] [CrossRef]
- Wolff, L.B.; Boult, T.E. Polarization/radiometric based material classification. In Proceedings of the 1989 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 4–8 June 1989; pp. 387–388. [Google Scholar]
- Miyazaki, D.; Kagesawa, M.; Ikeuchi, K. Transparent Surface Modeling from a Pair of Polarization Images. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 73–82. [Google Scholar] [CrossRef]
- Morel, O.; Stolz, C.; Meriaudeau, F.; Gorria, P. Active lighting applied to 3D reconstruction of specular metallic surfaces by polarization imaging. Appl. Opt. 2006, 45, 4062–4068. [Google Scholar] [CrossRef]
- Wolff, L.B. Polarization-based material classification from specular reflection. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 1059–1071. [Google Scholar] [CrossRef]
- Schechner, Y.; Shamir, J.; Kiryati, N. Polarization-based Decorrelation of Transparent Layers: The Inclination Angle of an Invisible Surface. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Los Alamitos, CA, USA, 20–27 September 1999; pp. 814–819. [Google Scholar] [CrossRef]
- Kalra, A.; Taamazyan, V.; Rao, S.K.; Venkataraman, K.; Raskar, R.; Kadambi, A. Deep Polarization Cues for Transparent Object Segmentation. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 8599–8608. [Google Scholar] [CrossRef]
- Yu, R.; Ren, W.; Zhao, M.; Wang, J.; Wu, D.; Xie, Y. Transparent objects segmentation based on polarization imaging and deep learning. Opt. Commun. 2024, 555, 130246. [Google Scholar] [CrossRef]
- Schwind, R. Evidence for true polarization vision based on a two-channel analyzer system in the eye of the water bug, Notonecta glauca. J. Comp. Physiol. A 1984, 154, 53–57. [Google Scholar] [CrossRef]
- Rankin, A.L.; Matthies, L.H. Passive sensor evaluation for unmanned ground vehicle mud detection. J. Field Robotics 2010, 27, 473–490. [Google Scholar] [CrossRef]
- Rankin, A.L.; Matthies, L.H.; Bellutta, P. Daytime water detection based on sky reflections. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5329–5336. [Google Scholar] [CrossRef]
- Nguyen, C.V.; Milford, M.; Mahony, R. 3D tracking of water hazards with polarized stereo cameras. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 5251–5257. [Google Scholar] [CrossRef]
- Berger, K.; Voorhies, R.; Matthies, L.H. Depth from stereo polarization in specular scenes for urban robotics. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 1966–1973. [Google Scholar] [CrossRef]
- Blanchon, M.; Sidibé, D.; Morel, O.; Seulin, R.; Braun, D.; Meriaudeau, F. P2D: A self-supervised method for depth estimation from polarimetry. In Proceedings of the 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 7357–7364. [Google Scholar] [CrossRef]
- Mei, H.; Dong, B.; Dong, W.; Yang, J.; Baek, S.H.; Heide, F.; Peers, P.; Wei, X.; Yang, X. Glass segmentation using intensity and spectral polarization cues. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 12612–12621. [Google Scholar] [CrossRef]
- Olsen, R.C.; Eyler, M.; Puetz, A.; Esterline, C. Initial results and field applications of a polarization imaging camera. In Polarization Science and Remote Sensing IV; SPIE Optical Engineering + Applications; SPIE: San Diego, CA, USA, 2009; Volume 7461. [Google Scholar] [CrossRef]
- Piccardi, A.; Colace, L. Optical Detection of Dangerous Road Conditions. Sensors 2019, 19, 1360. [Google Scholar] [CrossRef] [PubMed]
- Li, N.; Zhao, Y.; Wu, R.; Pan, Q. Polarization-guided road detection network for LWIR division-of-focal-plane camera. Opt. Lett. 2021, 46, 5679. [Google Scholar] [CrossRef] [PubMed]
- Xiang, K.; Yang, K.; Wang, K. Polarization-driven semantic segmentation via efficient attention-bridged fusion. Opt. Express 2021, 29, 4802. [Google Scholar] [CrossRef]
- El-Saba, A.; Bezuayehu, T. Higher probability of detection of subsurface land mines with a single sensor using multiple polarized and unpolarized image fusion. In Polarization: Measurement, Analysis, and Remote Sensing VIII; SPIE Defense and Security Symposium; SPIE: Orlando, FL, USA, 2008; Volume 6972. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, L.; Zhang, D.; Pan, Q. Object separation by polarimetric and spectral imagery fusion. Comput. Vis. Image Underst. 2009, 113, 855–866. [Google Scholar] [CrossRef]
- Belskaya, I.; Cellino, A.; Gil-Hutton, R.; Muinonen, K.; Shkuratov, Y. Asteroid Polarimetry. In Asteroids iv; Book Section 8; Michel, P., Demeo, F.E., Bottke, W.F., Eds.; The University of Arizona Press: Tucson, AZ, USA, 2015. [Google Scholar] [CrossRef]
- Ito, T.; Ishiguro, M.; Arai, T.; Imai, M.; Sekiguchi, T.; Bach, Y.P.; Kwon, Y.G.; Kobayashi, M.; Ishimaru, R.; Naito, H.; et al. Extremely strong polarization of an active asteroid (3200) Phaethon. Nat. Commun. 2018, 9, 2486. [Google Scholar] [CrossRef] [PubMed]
- Beamer, D.; Abeywickrema, U.; Banerjee, P. Statistical analysis of polarization vectors for target identification. Opt. Eng. 2018, 57, 054110. [Google Scholar] [CrossRef]
- Miller, M.; Blumer, R.; Howe, J. Active and passive SWIR imaging polarimetry. In Polarization Analysis and Measurement IV; International Symposium on Optical Science and Technology, San Diego, CA, USA, 29 July–3 August 2001; SPIE: San Diego, CA, USA, 2002; Volume 4481. [Google Scholar] [CrossRef]
- Liang, Y.; Wakaki, R.; Nobuhara, S.; Nishino, K. Multimodal material segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 19800–19808. [Google Scholar] [CrossRef]
- Lei, C.; Qi, C.; Xie, J.; Fan, N.; Koltun, V.; Chen, Q. Shape from polarization for complex scenes in the wild. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 12632–12641. [Google Scholar] [CrossRef]
- Wolff, L.B.; Boult, T.E. Constraining Object Features Using a Polarization Reflectance Model. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 635–657. [Google Scholar] [CrossRef]
- Rahmann, S.; Canterakis, N. Reconstruction of Specular Surfaces Using Polarization Imaging. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Kauai, HI, USA, 8–14 December 2001; Volume 1, pp. 149–155. [Google Scholar] [CrossRef]
- Miyazaki, D.; Kagesawa, M.; Ikeuchi, K. Polarization-based transparent surface modeling from two views. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 1381–1386. [Google Scholar] [CrossRef]
- Atkinson, G.A.; Hancock, E.R. Recovery of surface orientation from diffuse polarization. IEEE Trans. Image Process. 2006, 15, 1653–1664. [Google Scholar] [CrossRef] [PubMed]
- Tozza, S.; Smith, W.A.; Zhu, D.; Ramamoorthi, R.; Hancock, E.R. Linear differential constraints for photo-polarimetric height estimation. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2279–2287. [Google Scholar] [CrossRef]
- Miyazaki, D.; Saito, M.; Sato, Y.; Ikeuchi, K. Determining surface orientations of transparent objects based on polarization degrees in visible and infrared wavelengths. J. Opt. Soc. Am. A 2002, 19, 687–694. [Google Scholar] [CrossRef]
- Huynh, C.P.; Robles-Kelly, A.; Hancock, E. Shape and refractive index recovery from single-view polarisation images. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 1229–1236. [Google Scholar] [CrossRef]
- Huynh, C.P.; Robles-Kelly, A.; Hancock, E.R. Shape and refractive index from single-view spectro-polarimetric images. Int. J. Comput. Vis. 2013, 101, 64–94. [Google Scholar] [CrossRef]
- Mahmoud, A.H.; El-Melegy, M.T.; Farag, A.A. Direct method for shape recovery from polarization and shading. In Proceedings of the 2012 19th IEEE International Conference on Image Processing, Orlando, FL, USA, 30 September–3 October 2012; pp. 1769–1772. [Google Scholar] [CrossRef]
- Ngo Thanh, T.; Nagahara, H.; Taniguchi, R.i. Shape and light directions from shading and polarization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 2310–2318. [Google Scholar] [CrossRef]
- Smith, W.A.P.; Ramamoorthi, R.; Tozza, S. Linear depth estimation from an uncalibrated, monocular polarisation image. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings, Part VIII 14. Springer: Berlin/Heidelberg, Germany, 2016; pp. 109–125. [Google Scholar] [CrossRef]
- Baek, S.H.; Jeon, D.S.; Tong, X.; Kim, M.H. Simultaneous acquisition of polarimetric SVBRDF and normals. ACM Trans. Graph. 2018, 37, 1–15. [Google Scholar] [CrossRef]
- Deschaintre, V.; Lin, Y.; Ghosh, A. Deep polarization imaging for 3D shape and SVBRDF acquisition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 15567–15576. [Google Scholar] [CrossRef]
- Smith, W.A.; Ramamoorthi, R.; Tozza, S. Height-from-polarisation with unknown lighting or albedo. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 41, 2875–2888. [Google Scholar] [CrossRef]
- Ba, Y.; Gilbert, A.; Wang, F.; Yang, J.; Chen, R.; Wang, Y.; Yan, L.; Shi, B.; Kadambi, A. Deep Shape from Polarization. In Proceedings of the Computer Vision—ECCV, Glasgow, UK, 23–28 August 2020; Vedaldi, A., Bischof, H., Brox, T., Frahm, J.M., Eds.; Springer: Cham, Switzerland, 2020; pp. 554–571. [Google Scholar] [CrossRef]
- Yang, X.; Cheng, C.; Duan, J.; Hao, Y.F.; Zhu, Y.; Zhang, H. Polarized Object Surface Reconstruction Algorithm Based on RU-GAN Network. Sensors 2023, 23, 3638. [Google Scholar] [CrossRef]
- Ichikawa, T.; Purri, M.; Kawahara, R.; Nobuhara, S.; Dana, K.; Nishino, K. Shape from sky: Polarimetric normal recovery under the sky. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 14832–14841. [Google Scholar] [CrossRef]
- Cai, Y.; Li, X.; Liu, F.; Liu, J.; Liu, K.; Liu, Z.; Shao, X. Enhancing polarization 3D facial imaging: Overcoming azimuth ambiguity without extra depth devices. Opt. Express 2023, 31, 43891–43907. [Google Scholar] [CrossRef] [PubMed]
- Kadambi, A.; Taamazyan, V.; Shi, B.; Raskar, R. Polarized 3d: High-quality depth sensing with polarization cues. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 3370–3378. [Google Scholar] [CrossRef]
- Fukao, Y.; Kawahara, R.; Nobuhara, S.; Nishino, K. Polarimetric normal stereo. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 682–690. [Google Scholar] [CrossRef]
- Zhu, D.; Smith, W.A.P. Depth From a Polarisation + RGB Stereo Pair. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 7578–7587. [Google Scholar] [CrossRef]
- Tian, X.; Liu, R.; Wang, Z.; Ma, J. High quality 3D reconstruction based on fusion of polarization imaging and binocular stereo vision. Inf. Fusion 2022, 77, 19–28. [Google Scholar] [CrossRef]
- Cui, Z.; Gu, J.; Shi, B.; Tan, P.; Kautz, J. Polarimetric multi-view stereo. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1558–1567. [Google Scholar] [CrossRef]
- Cui, Z.; Larsson, V.; Pollefeys, M. Polarimetric relative pose estimation. In Proceedings of the IEEE/CVF International Conference on Computer Vision (CVPR), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 2671–2680. [Google Scholar] [CrossRef]
- Gao, D.; Li, Y.; Ruhkamp, P.; Skobleva, I.; Wysocki, M.; Jung, H.; Wang, P.; Guridi, A.; Busam, B. Polarimetric Pose Prediction. In Proceedings of the Computer Vision—ECCV, Tel Aviv, Israel, 23–27 October 2022; Avidan, S., Brostow, G., Cissé, M., Farinella, G.M., Hassner, T., Eds.; Springer: Cham, Switzerland, 2022; pp. 735–752. [Google Scholar] [CrossRef]
- Wang, G.; Manhardt, F.; Tombari, F.; Ji, X. Gdr-net: Geometry-guided direct regression network for monocular 6D object pose estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 16611–16621. [Google Scholar] [CrossRef]
- Zou, S.; Zuo, X.; Wang, S.; Qian, Y.; Guo, C.; Cheng, L. Human Pose and Shape Estimation from Single Polarization Images. IEEE Trans. Multimed. 2022, 25, 3560–3572. [Google Scholar] [CrossRef]
- Huang, T.; Li, H.; He, K.; Sui, C.; Li, B.; Liu, Y.H. Learning Accurate 3D Shape Based on Stereo Polarimetric Imaging. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 17287–17296. [Google Scholar] [CrossRef]
- Muglikar, M.; Bauersfeld, L.; Moeys, D.P.; Scaramuzza, D. Event-based shape from polarization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 1547–1556. [Google Scholar] [CrossRef]
- Mei, H.; Wang, Z.; Yang, X.; Wei, X.; Delbruck, T. Deep Polarization Reconstruction With PDAVIS Events. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar] [CrossRef]
- Jeon, D.S.; Meuleman, A.; Baek, S.H.; Kim, M.H. Polarimetric iToF: Measuring High-Fidelity Depth through Scattering Media. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 12353–12362. [Google Scholar] [CrossRef]
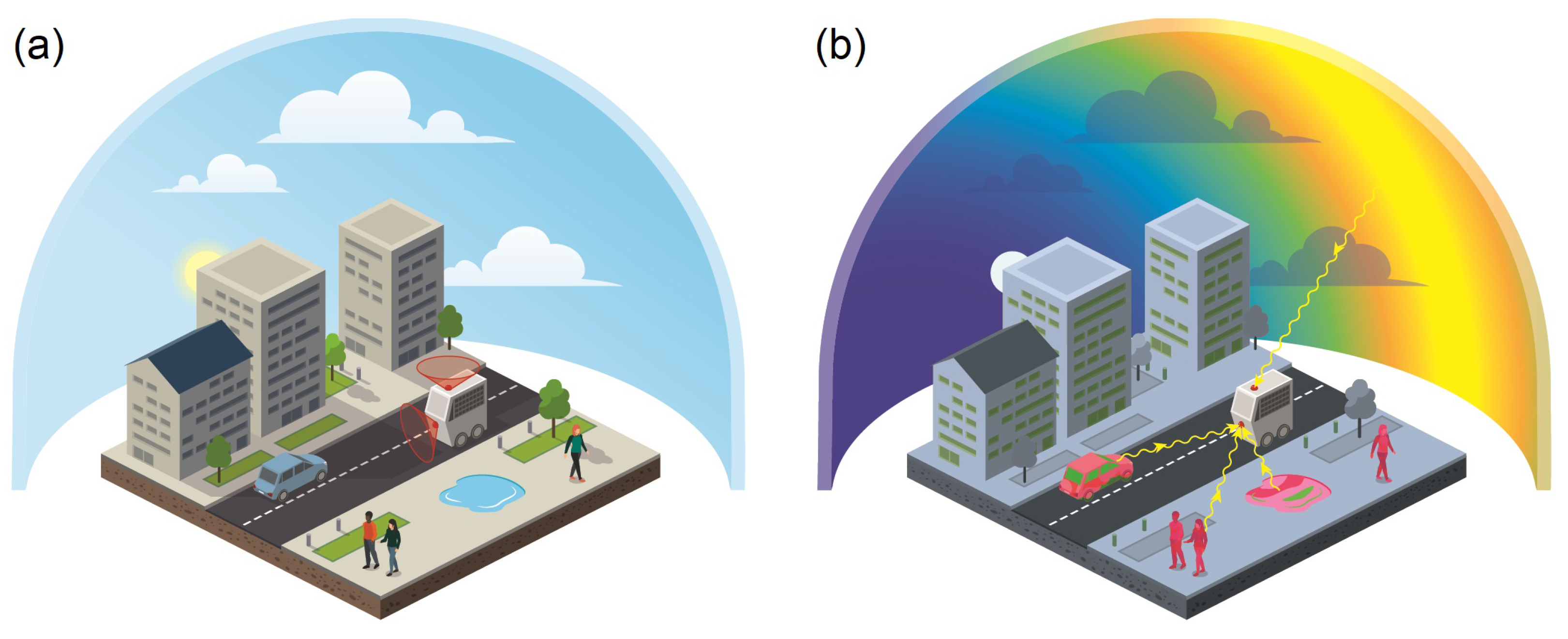
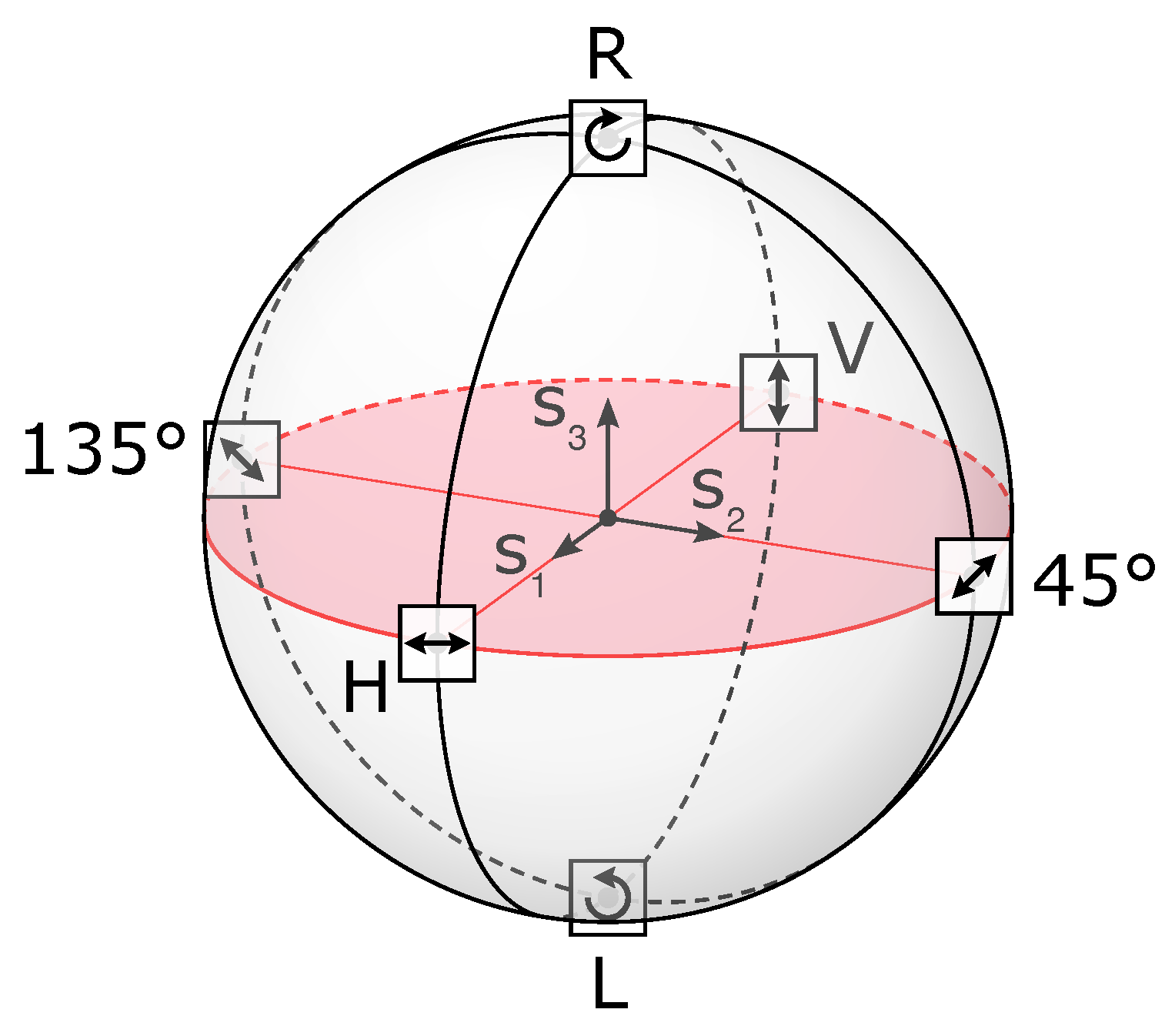

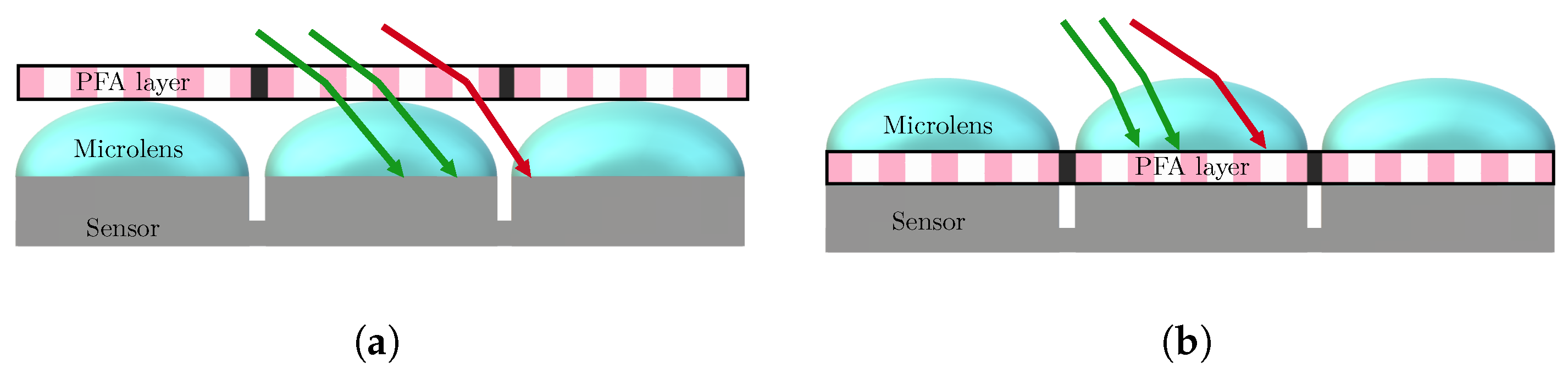


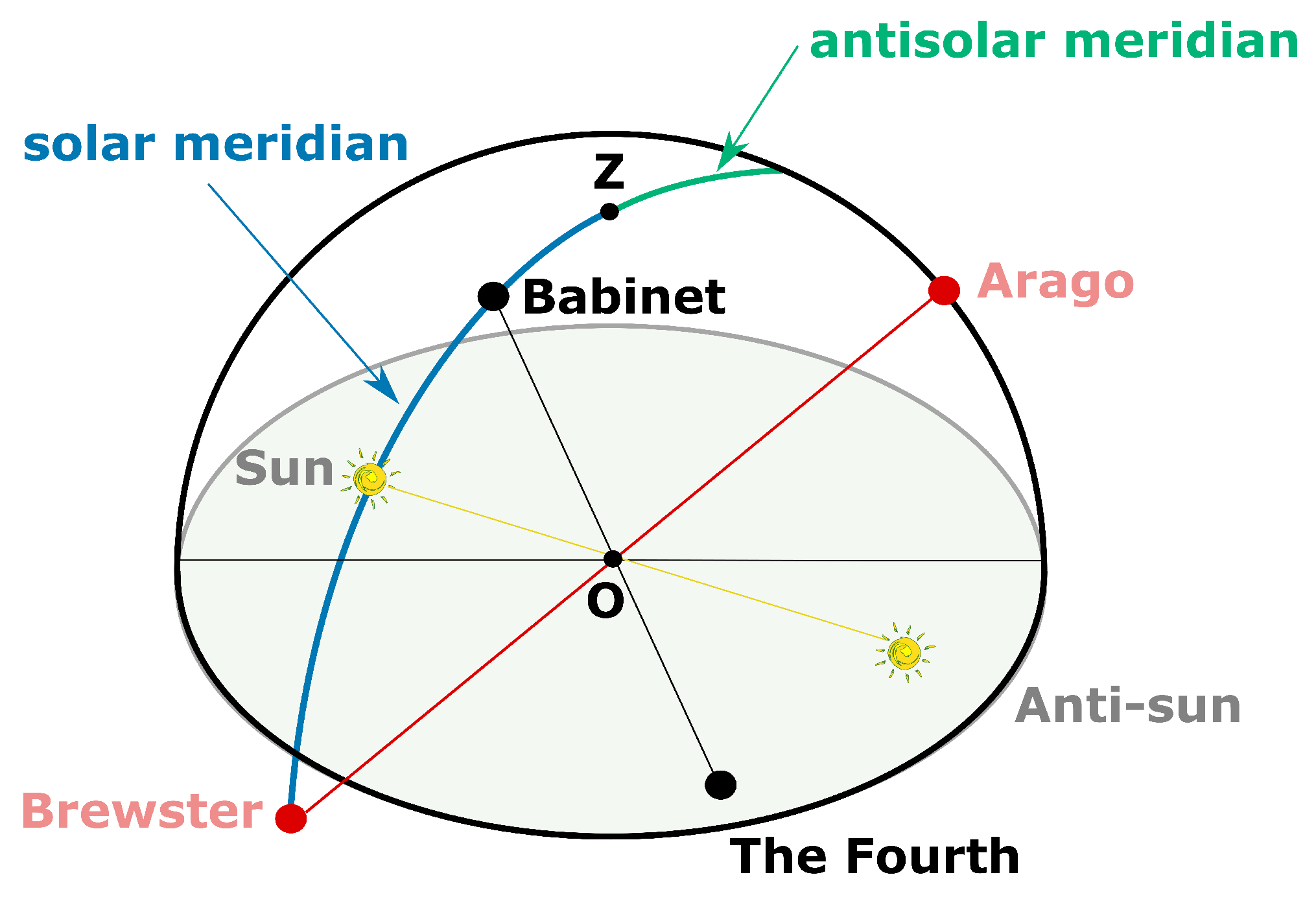
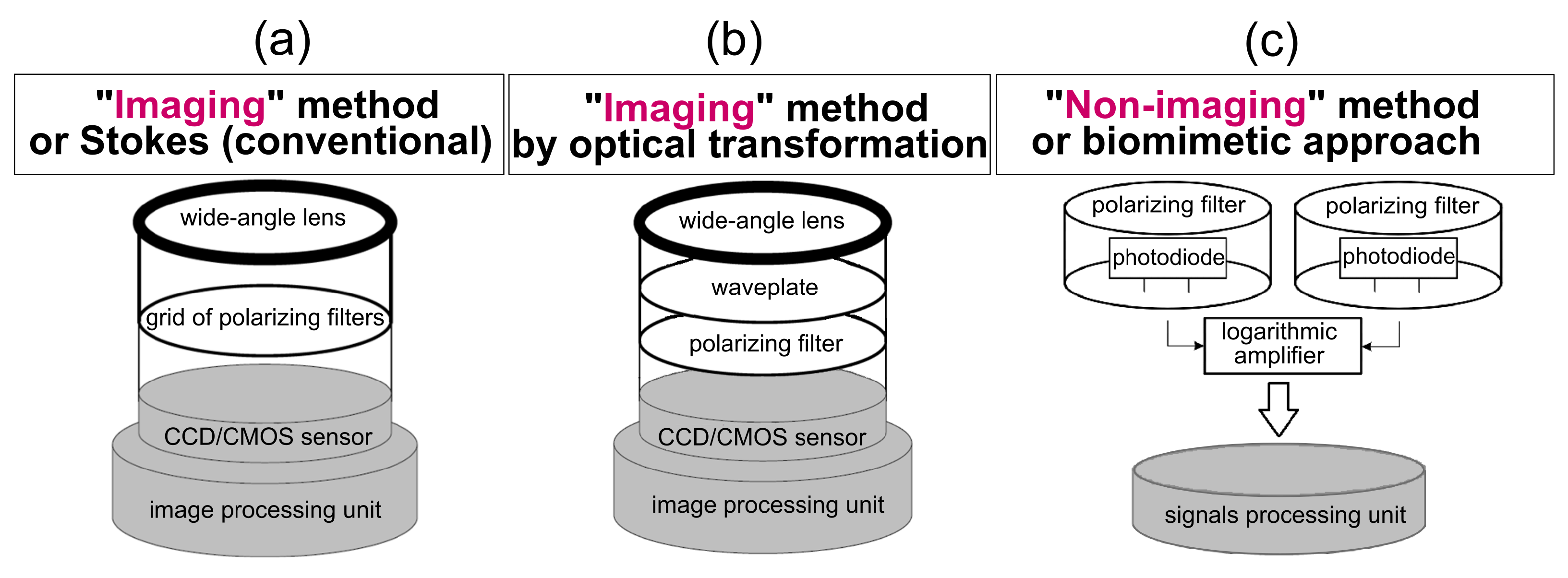





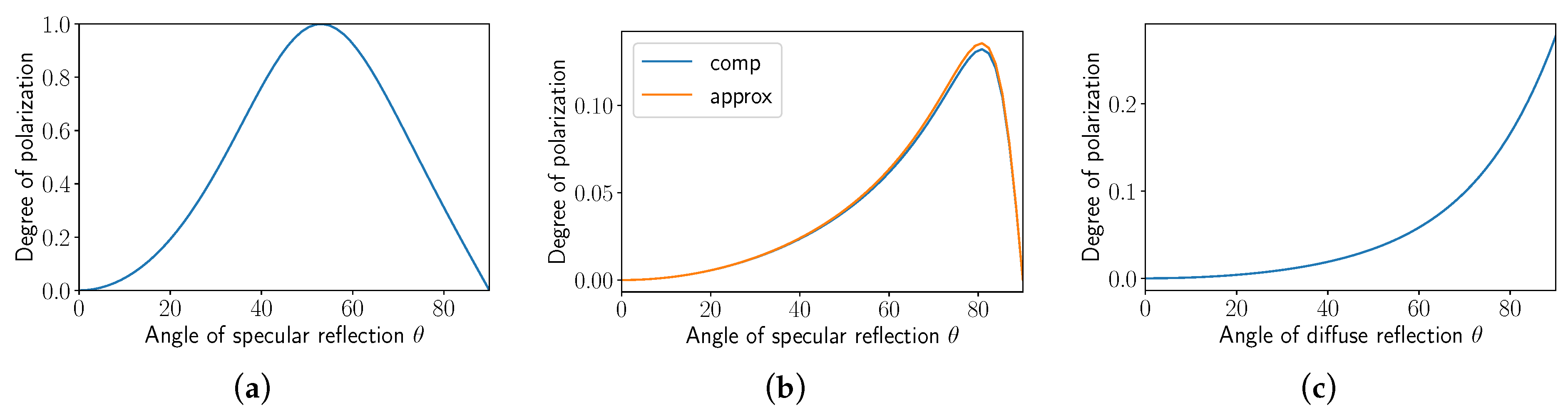
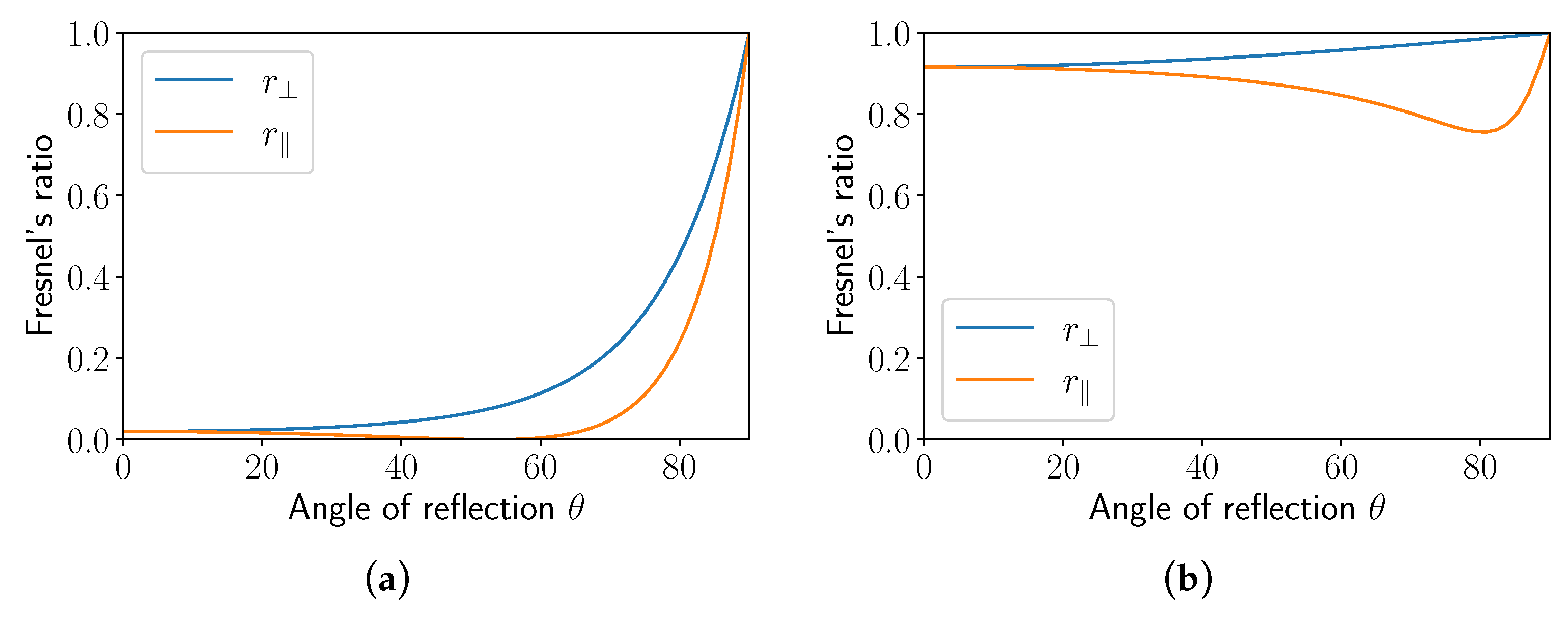
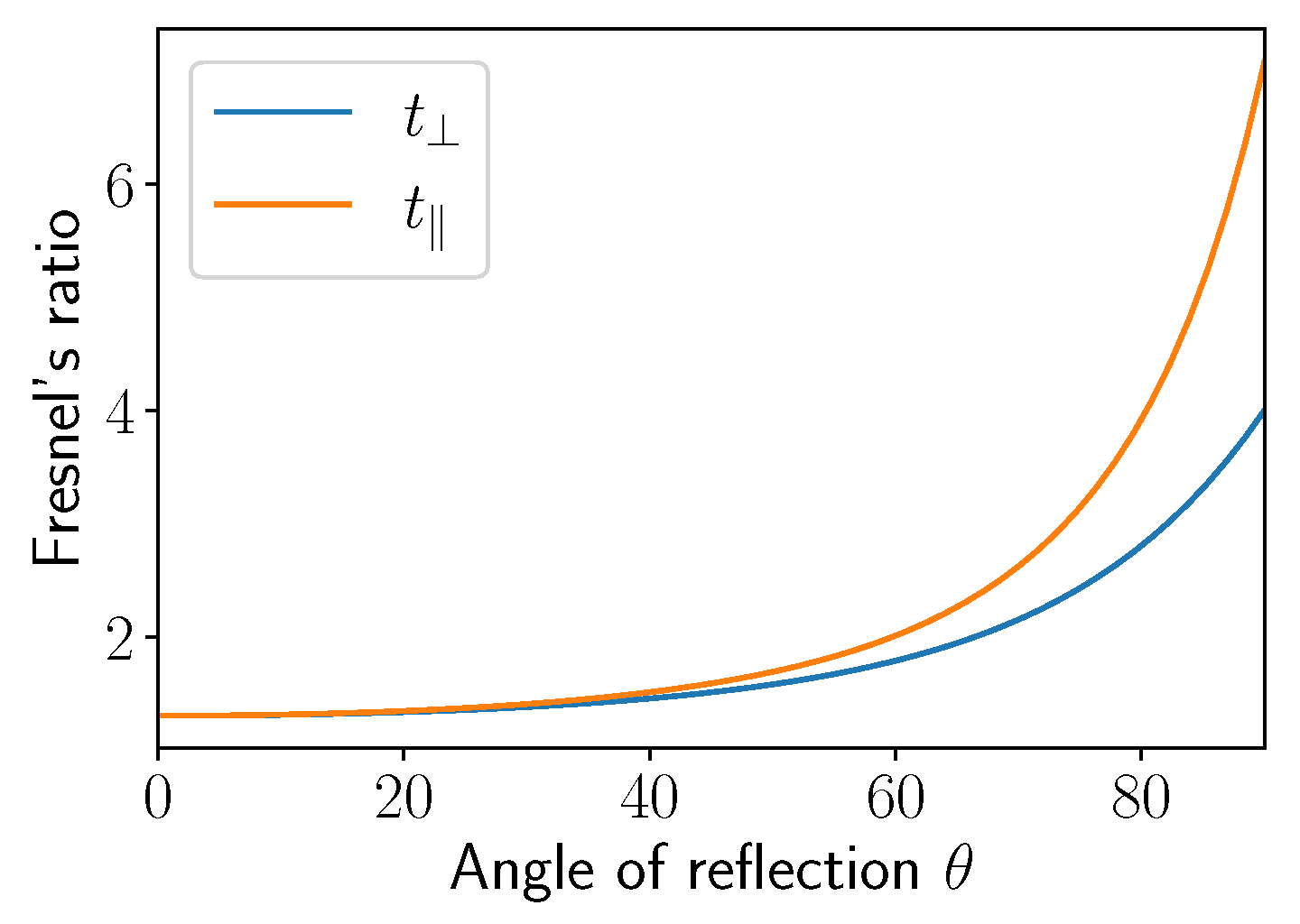

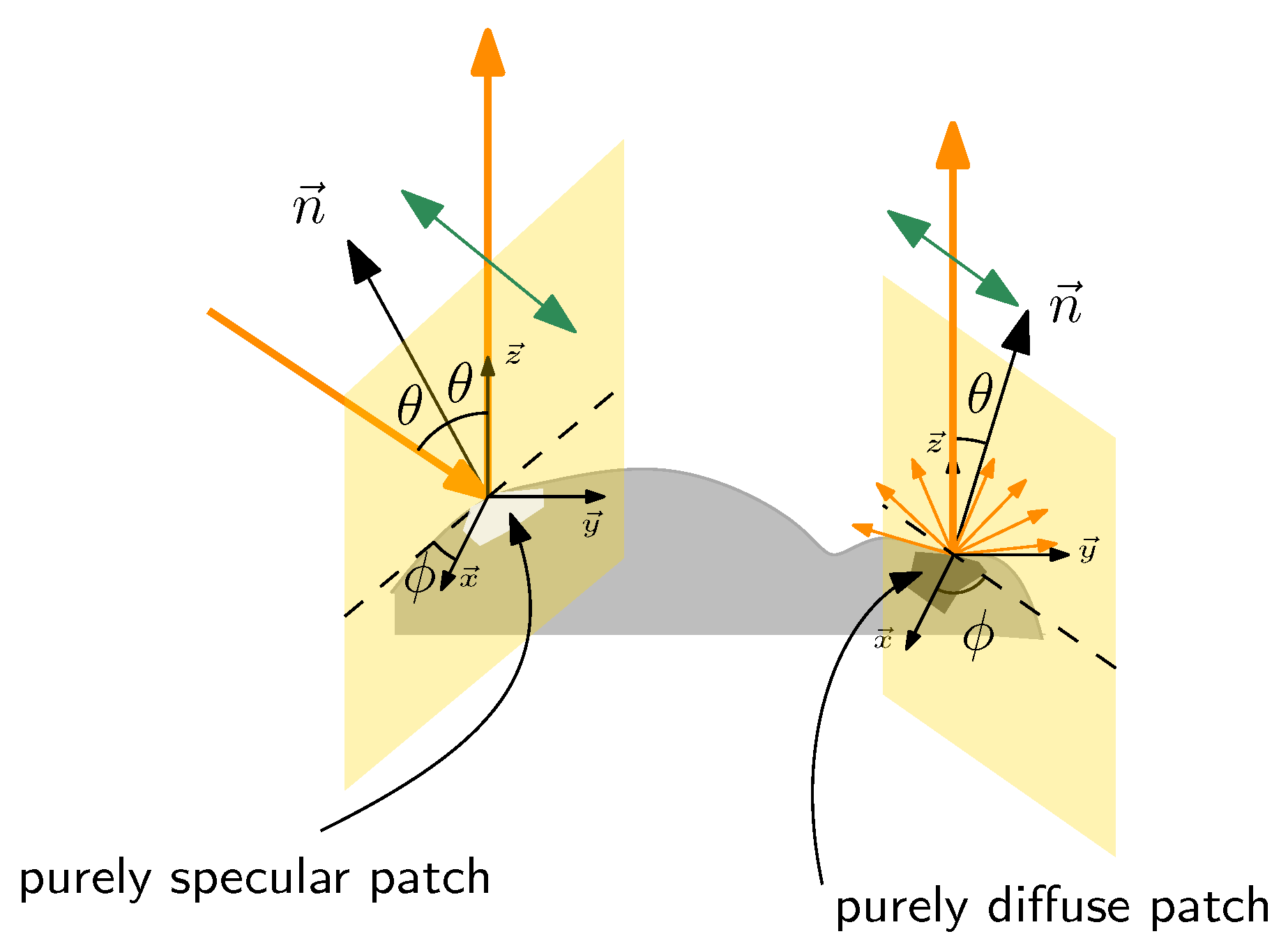


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Technology | Cameras/ Optics | Pros | Cons | Stokes Components |
|---|---|---|---|---|---|
| Division of Time (DoT) | Rotating elements [48,49,50] | 1/1 |
|
| 3–4 |
| Liquid crystal cells [51,52,53,54,55,56,57,58,59] | 1/1 |
|
| 2–4 | |
| Replication of Aperture (RoAp) | Multiple systems [60,61,62] | mult./mult. |
|
| 3 () |
| Division of Amplitude (DoAmp) | Several focal plane arrays [63,64,65] | multiple/1 |
|
| 4 |
| Division of Aperture (DoAp) | One focal plane array [66] | 1/1 |
|
| 3 () |
| Division of Focal Plane (DoFP) | Polarimetric filter array [67,68,69,70] | 1/1 |
|
| 3 |
| Material | Reflection | Lighting Invariance | Ambiguity Solving | Unknown Refractive Index | ||||
|---|---|---|---|---|---|---|---|---|
| Dielectric | Metallic | Specular | Diffuse | Azimuth | Zenith | |||
| Rahmann 2001 [304] | ✓ | ✓ | quadric object, 2 views | - | ✓ | |||
| Miyazaki 2002 [308] | ✓ | ✓ | convex shape | visible and IR | ||||
| Miyazaki 2004 [278] | ✓ | ✓ | convex shape | 2 views | ||||
| Atkinson 2006 [306] | ✓ | ✓ | convex shape | no ambiguity in diffuse mode | ||||
| Morel 2006 [279] | ✓ | active lighting | smooth surfaces | |||||
| Huynh 2010 [309] | ✓ | ✓ | spectral variation of the phase of polarization | convex surface | ✓ | |||
| Mahmoud 2012 [311] | ✓ | ✓ | shape from shading | |||||
| Ngo 2015 [312] | ✓ | ✓ | shape from shading and controlled lighting | ✓ | ||||
| Smith 2016 [313] | ✓ | ✓ | ✓ | shape from shading | ||||
| Smith 2018 [316] | ✓ | ✓ | ✓ | ✓ | shape from shading | |||
| Ba 2020 [317] | ✓ | ✓ | ✓ | ✓ | shape from shading and deep learning | |||
| Yang 2023 [318] | ✓ | ✓ | ✓ | ✓ | deep learning | ✓ | ||
| Cai 2023 [320] | ✓ | ✓ | Prior feature information of facial polarization images | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serres, J.R.; Lapray, P.-J.; Viollet, S.; Kronland-Martinet, T.; Moutenet, A.; Morel, O.; Bigué, L. Passive Polarized Vision for Autonomous Vehicles: A Review. Sensors 2024, 24, 3312. https://doi.org/10.3390/s24113312
Serres JR, Lapray P-J, Viollet S, Kronland-Martinet T, Moutenet A, Morel O, Bigué L. Passive Polarized Vision for Autonomous Vehicles: A Review. Sensors. 2024; 24(11):3312. https://doi.org/10.3390/s24113312
Chicago/Turabian StyleSerres, Julien R., Pierre-Jean Lapray, Stéphane Viollet, Thomas Kronland-Martinet, Antoine Moutenet, Olivier Morel, and Laurent Bigué. 2024. "Passive Polarized Vision for Autonomous Vehicles: A Review" Sensors 24, no. 11: 3312. https://doi.org/10.3390/s24113312
APA StyleSerres, J. R., Lapray, P.-J., Viollet, S., Kronland-Martinet, T., Moutenet, A., Morel, O., & Bigué, L. (2024). Passive Polarized Vision for Autonomous Vehicles: A Review. Sensors, 24(11), 3312. https://doi.org/10.3390/s24113312