
Human-in-the-Loop Optimization of Knee Exoskeleton Assistance for Minimizing User’s Metabolic and Muscular Effort


 , ,
, ,  and
and 
Abstract
1. Introduction
2. Materials and Methods
2.1. SmartOs System
2.2. Metabolic Cost Estimation
2.3. HITL Optimization
2.4. Torque-Tracking Control
3. Experimental Validation
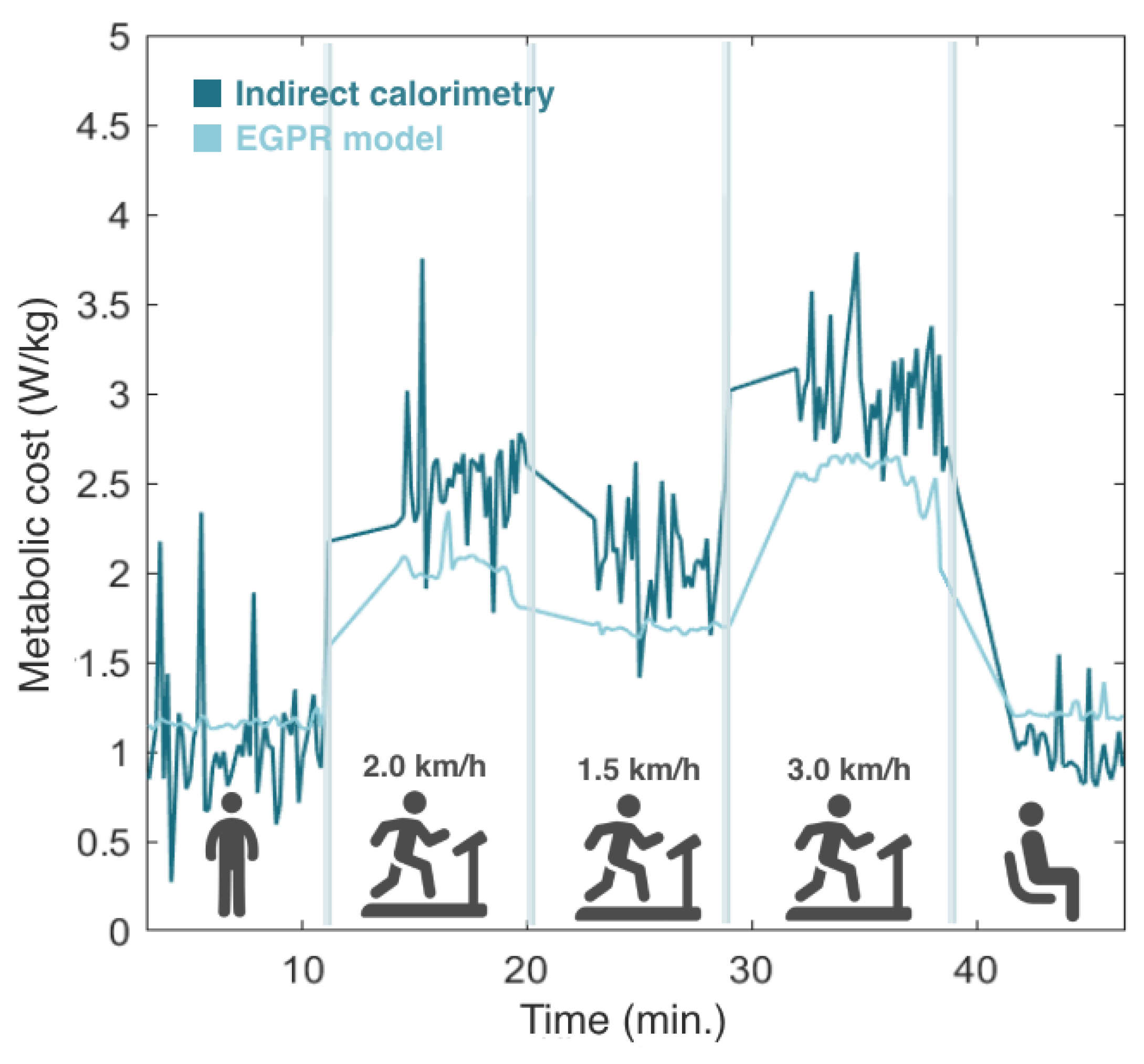
3.1. Metabolic Cost Estimation
3.1.1. Participants
3.1.2. Instrumentation and Protocol
3.1.3. Model Evaluation
3.2. HITL Control
3.2.1. Participants
3.2.2. Instrumentation and Protocol
3.2.3. Control Evaluation
4. Results
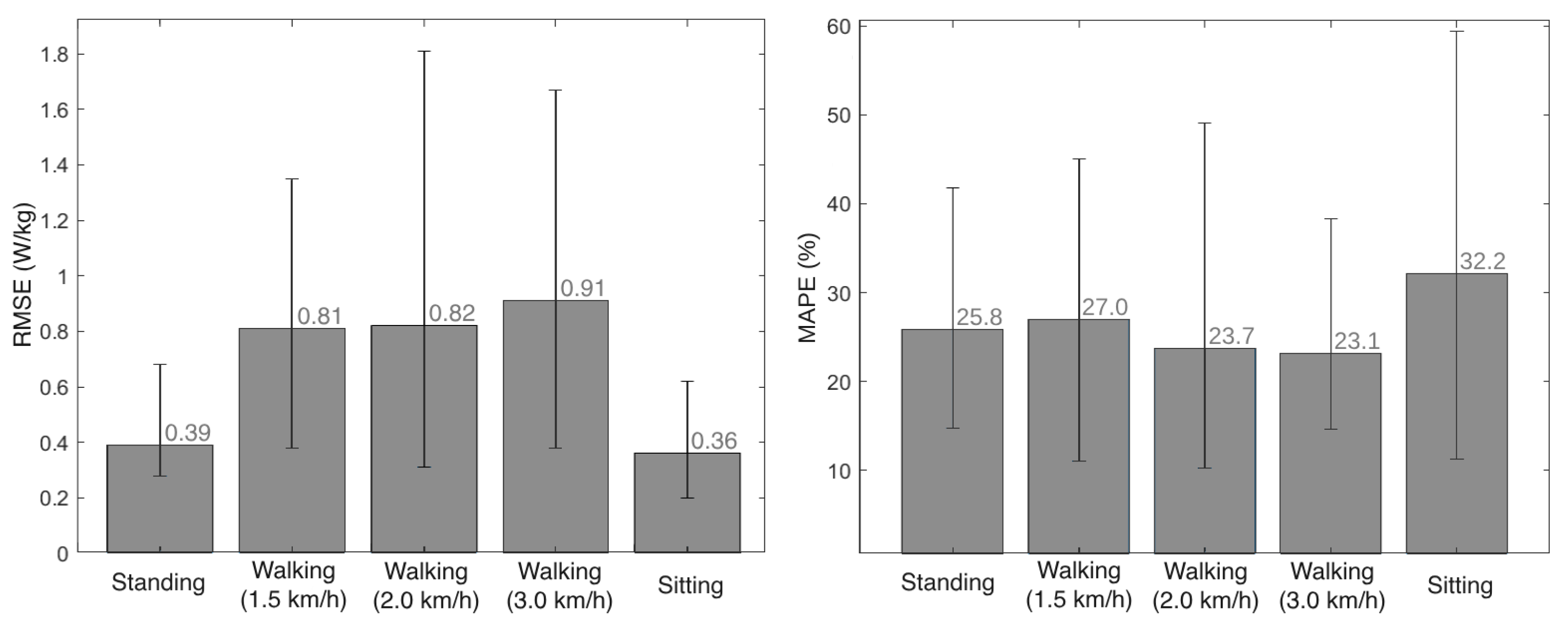
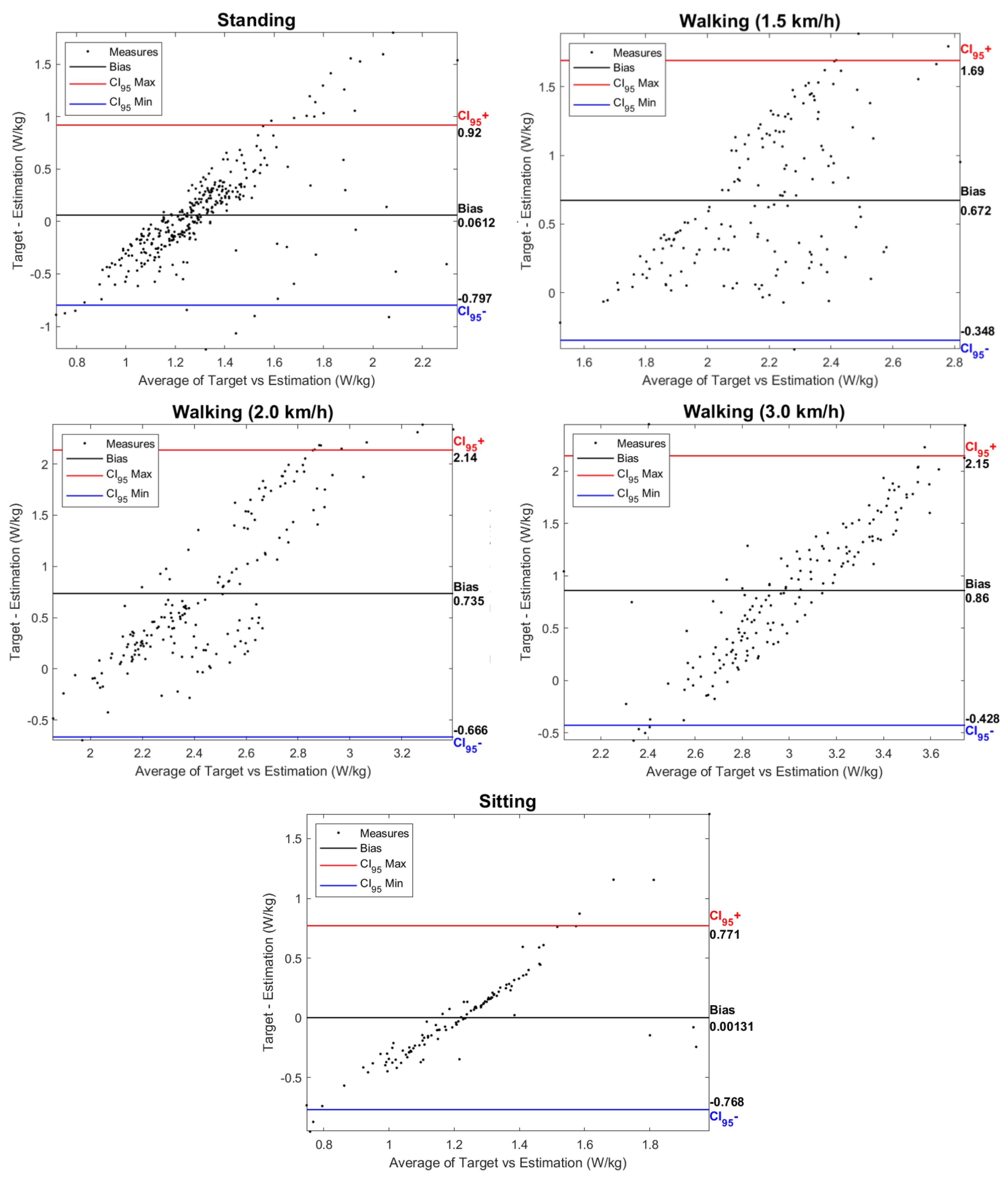
4.1. Metabolic Cost Estimation
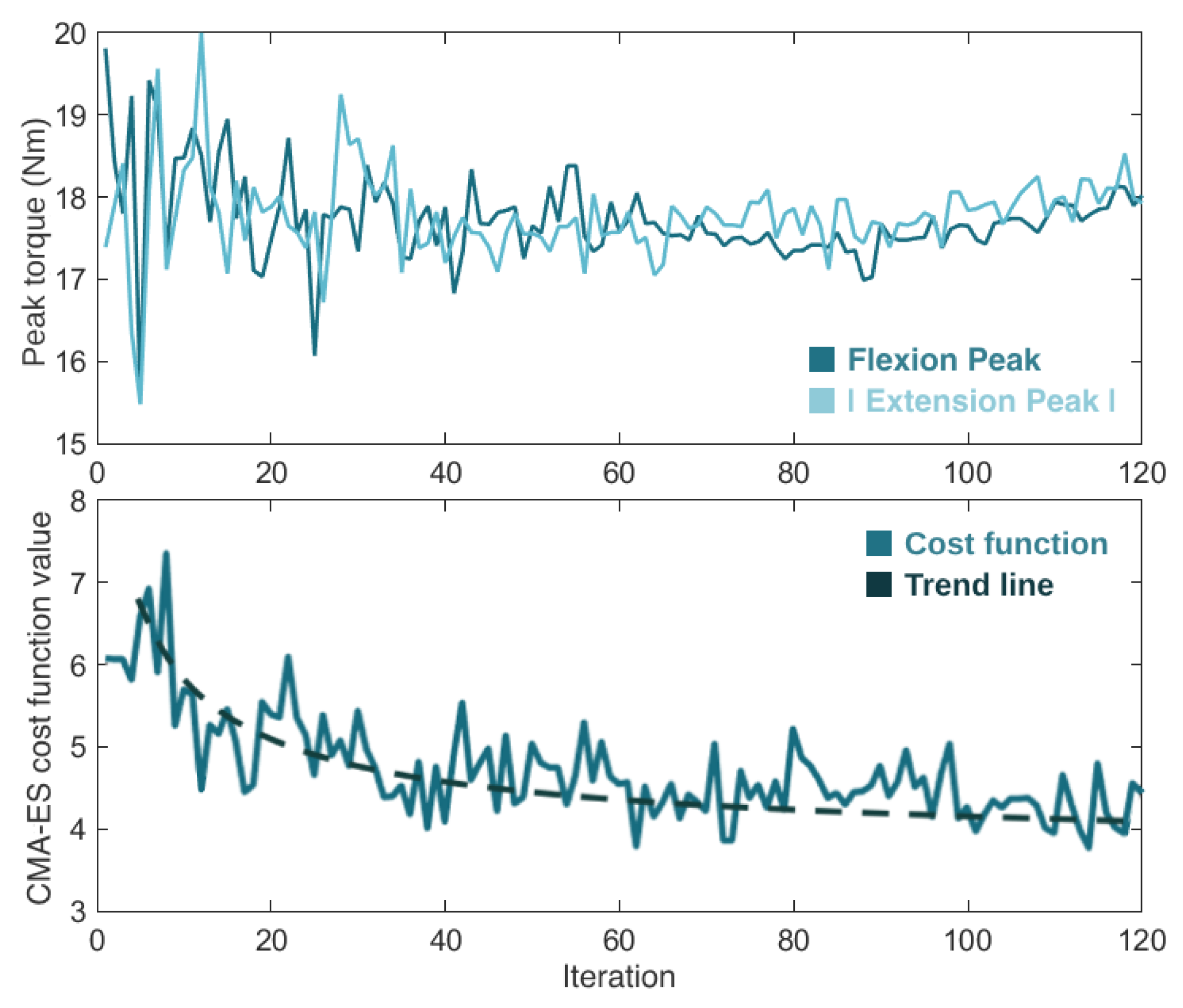
4.2. HITL Control
5. Discussion
5.1. Metabolic Cost Estimation
5.2. HITL Control
5.2.1. HITL Optimization
5.2.2. Control Comparison
5.3. Limitations
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BMI | Body Mass Index |
| CCU | Central Controller Unit |
| CMA-ES | Covariance Matrix Adaptation Strategy |
| EGPR | Exponential Gaussian Process Regressor |
| HITL | Human-In-The-Loop |
| IMU | Inertial Measurement Unit |
| MAD | Mean Absolute Deviation |
| MAPE | Mean Absolute Percentage Error |
| PID | Proportional-Integral-Derivative |
| RMSE | Root Mean Squared Error |
References
- De Kok, J.; Snijders, J.; Roullis, G.; Clarke, M.; Peereboom, K.; van Dorst, P.; Isusi, I. Work-Related Musculoskeletal Disorders: Prevalence, Costs and Demographics in the EU; Publications Office of the European Union: Luxembourg, 2019. [Google Scholar] [CrossRef]
- Govaerts, R.; Tassignon, B.; Ghillebert, J.; Serrien, B.; De Bock, S.; Ampe, T.; El Makrini, I.; Vanderborght, B.; Meeusen, R.; De Pauw, K. Prevalence and incidence of work-related musculoskeletal disorders in secondary industries of 21st century Europe: A systematic review and meta-analysis. BMC Musculoskelet. Disord. 2021, 22, 751. [Google Scholar] [CrossRef] [PubMed]
- Da Costa, B.; Vieira, E. Risk factors for work-related musculoskeletal disorders: A systematic review of recent longitudinal studies. Am. J. Ind. Med. 2010, 53, 285–323. [Google Scholar] [CrossRef]
- Kuber, P.; Alemi, M.; Rashedi, E. A Systematic Review on Lower-Limb Industrial Exoskeletons: Evaluation Methods, Evidence, and Future Directions. Ann. Biomed. Eng. 2023, 51, 1665–1682. [Google Scholar] [CrossRef] [PubMed]
- Golabchi, A.; Chao, A.; Tavakoli, M. A Systematic Review of Industrial Exoskeletons for Injury Prevention: Efficacy Evaluation Metrics, Target Tasks, and Supported Body Postures. Sensors 2022, 22, 2714. [Google Scholar] [CrossRef]
- Bär, M.; Steinhilber, B.; Rieger, M.; Luger, T. The influence of using exoskeletons during occupational tasks on acute physical stress and strain compared to no exoskeleton—A systematic review and meta-analysis. Appl. Ergon. 2021, 94, 103385. [Google Scholar] [CrossRef] [PubMed]
- Huysamen, K.; de Looze, M.; Bosh, T.; Ortiz, J.; Toxiri, S.; O’Sullivan, L. Assessment of an active industrial exoskeleton to aid dynamic lifting and lowering manual handling tasks. Appl. Ergon. 2018, 68, 125–131. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.; Ding, Y.; Malcolm, P.; Speeckaert, J.; Siviy, C.; Walsh, C.; Kuindersma, S. Human-in-the-loop Bayesian optimization of wearable device parameters. PLoS ONE 2017, 12, e0184054. [Google Scholar] [CrossRef]
- Zhang, J.; Fiers, P.; Witte, K.; Jackson, R.; Poggensee, K.; Atkeson, C.; Collins, S. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1283. [Google Scholar] [CrossRef]
- Slade, P.; Kochenderfer, M.; Delp, S.; Collins, S. Personalizing exoskeleton assistance while walking in the real world. Nature 2022, 610, 277–282. [Google Scholar] [CrossRef]
- Witte, K.; Fiers, P.; Sheets-Singer, A.; Collins, S. Improving the energy economy of human running with powered and unpowered ankle exoskeleton assistance. Sci. Robot 2020, 5, eaay9108. [Google Scholar] [CrossRef]
- Ding, Y.; Kim, M.; Kuindersma, S.; Walsh, C. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking. Sci. Robot 2018, 3, eaar5438. [Google Scholar] [CrossRef]
- Kantharaju, P.; Jeong, H.; Ramadurai, S.; Jacobson, M.; Jeong, H.; Kim, M. Reducing Squat Physical Effort Using Personalized Assistance From an Ankle Exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 1786–1795. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Quinlivan, B.; Deprey, L.; Arumukhom Revi, D.; Eckert-Erdheim, A.; Murphy, P.; Orzel, D.; Walsh, C. Reducing the energy cost of walking with low assistance levels through optimized hip flexion assistance from a soft exosuit. Sci. Rep. 2022, 12, 11004. [Google Scholar] [CrossRef]
- Xu, L.; Liu, X.; Chen, Y.; Yu, L.; Yan, Z.; Yang, C.; Zhou, C.; Yang, W. Reducing the muscle activity of walking using a portable hip exoskeleton based on human-in-the-loop optimization. Front. Bioeng. Biotechnol. 2023, 11, 1006326. [Google Scholar] [CrossRef] [PubMed]
- Han, H.; Wang, W.; Zhang, F.; Li, X.; Chen, J.; Han, J.; Zhang, J. Selection of Muscle-Activity-Based Cost Function in Human-in-the-Loop Optimization of Multi-Gait Ankle Exoskeleton Assistance. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 944–952. [Google Scholar] [CrossRef]
- Song, S.; Collins, S. Optimizing Exoskeleton Assistance for Faster Self-Selected Walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 786–795. [Google Scholar] [CrossRef] [PubMed]
- Ingraham, K.; Ferris, D.; David Remy, C.; Crayton Pruitt Family, J. Evaluating physiological signal salience for estimating metabolic energy cost from wearable sensors. J. Appl. Physiol. 2019, 126, 717–729. [Google Scholar] [CrossRef]
- Lucena, A.; Guedes, J.; Vaz, M.; Silva, L.; Bustos, D.; Souza, E. Modeling energy expenditure estimation in occupational context by actigraphy: A multi regression mixed-effects model. Int. J. Environ. Res. Public Health 2021, 18, 10419. [Google Scholar] [CrossRef]
- Adeyeri, B.; Thomas, S.; Arellano, C. A simple method reveals minimum time required to quantify steady-rate metabolism and net cost of transport for human walking. J. Exp. Biol. 2022, 225, jeb244471. [Google Scholar] [CrossRef]
- Koller, J.; Gates, D.; Ferris, D.; David Remy, C. “Body-in-the-Loop” Optimization of Assistive Robotic Devices: A Validation Study. In Proceedings of the Robotics: Science and Systems XII, Ann Arbor, MI, USA, 18–22 June 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Slade, P.; Kochenderfer, M.; Delp, S.; Collins, S. Sensing leg movement enhances wearable monitoring of energy expenditure. Nat. Commun. 2021, 12, 4312. [Google Scholar] [CrossRef]
- Sazonov, E.; Hegde, N.; Browning, R.; Melanson, E.; Sazonova, N. Posture and Activity Recognition and Energy Expenditure Estimation in a Wearable Platform. IEEE J. Biomed. Health Inform. 2015, 19, 1339–1346. [Google Scholar] [CrossRef]
- Lopes, J.; Figueiredo, J.; Fonseca, P.; Cerqueira, J.; Vilas-Boas, J.; Santos, C. Deep Learning-Based Energy Expenditure Estimation in Assisted and Non-Assisted Gait Using Inertial, EMG, and Heart Rate Wearable Sensors. Sensors 2022, 22, 7913. [Google Scholar] [CrossRef] [PubMed]
- Ni, Z.; Wu, T.; Wang, T.; Sun, F.; Li, Y. Deep Multi-Branch Two-Stage Regression Network for Accurate Energy Expenditure Estimation With ECG and IMU Data. IEEE Trans. Biomed. Eng. 2022, 69, 3224–3233. [Google Scholar] [CrossRef]
- Ni, Z.; Wu, T.; Wang, T.; Sun, F.; Li, Y. Physical activity, exercise, and physical fitness: Definitions and distinctions for health-related research. Public Health Rep. 1985, 100, 126–131. [Google Scholar]
- Figueiredo, J.; Carvalho, S.; Vilas-Boas, J.; Gonçalves, L.; Moreno, J.; Santos, C. Wearable Inertial Sensor System towards Daily Human Kinematic Gait Analysis: Benchmarking Analysis to MVN BIOMECH. Sensors 2020, 20, 2185. [Google Scholar] [CrossRef]
- Figueiredo, J.S.C. Smart Wearable Orthosis to Assist Impaired Human Walking. Ph.D. Thesis, University of Minho, Braga, Portugal, 2019. Available online: https://hdl.handle.net/1822/65877 (accessed on 24 March 2024).
- Monteiro, S.; Figueiredo, J.; Santos, C. Towards a more efficient human-exoskeleton assistance, 2023. In Proceedings of the 2023 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Tomar, Portugal, 26–27 April 2023. [Google Scholar] [CrossRef]
- Gjoreski, H.; Kaluža, B.; Gams, M.; Milić, R.; Luštrek, M. Context-based ensemble method for human energy expenditure estimation. Appl. Soft Comput. J. 2015, 37, 960–970. [Google Scholar] [CrossRef]
- Bazuelo-Ruiz, B.; De Rosario, H.; Durá-Gil, J.V. Estimation of energy expenditure in adults with accelerometry and heart rate. Sci. Sport 2022, 37, 431–437. [Google Scholar] [CrossRef]
- Hansen, N. The CMA Evolution Strategy: A Comparing Review. In Towards a New Evolutionary Computation; Lozano, J., Larrañaga, P., Inza, I., Bengoetxea, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 75–102. [Google Scholar] [CrossRef]
- Burden, R.; Faires, J. Numerical Analysis; Cengage Learning: Boston, MA, USA, 2010. [Google Scholar]
- Baud, R.; Manzoori, A.R.; Ijspeert, A.; Bouri, M. Review of control strategies for lower-limb exoskeletons to assist gait. J. Neuroeng. Rehabil. 2021, 18, 119. [Google Scholar] [CrossRef]
- Felix, P.; Figueiredo, J.; Santos, C.; Moreno, J. Electronic design and validation of Powered Knee Orthosis system embedded with wearable sensors, 2017. In Proceedings of the 2017 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Coimbra, Portugal, 26–28 April 2023. [Google Scholar] [CrossRef]
- Bryan, G.; Franks, P.; Song, S.; Reyes, R.; O’Donovan, M.; Gregorczyk, K.; Collins, S. Optimized hip-knee-ankle exoskeleton assistance reduces the metabolic cost of walking with worn loads. J. Neuroeng. Rehabil. 2021, 18, 152. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| n | 2 | 1.4 | 0.59 | 0.51 | |||
| 6 | 1.4 | 0.29 | 0.51 | ||||
| 1.51 | 1.4 | 0.12 | 2.24 | ||||
| 0.12 | I | 3 | 2.24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monteiro, S.; Figueiredo, J.; Fonseca, P.; Vilas-Boas, J.P.; Santos, C.P. Human-in-the-Loop Optimization of Knee Exoskeleton Assistance for Minimizing User’s Metabolic and Muscular Effort. Sensors 2024, 24, 3305. https://doi.org/10.3390/s24113305
Monteiro S, Figueiredo J, Fonseca P, Vilas-Boas JP, Santos CP. Human-in-the-Loop Optimization of Knee Exoskeleton Assistance for Minimizing User’s Metabolic and Muscular Effort. Sensors. 2024; 24(11):3305. https://doi.org/10.3390/s24113305
Chicago/Turabian StyleMonteiro, Sara, Joana Figueiredo, Pedro Fonseca, J. Paulo Vilas-Boas, and Cristina P. Santos. 2024. "Human-in-the-Loop Optimization of Knee Exoskeleton Assistance for Minimizing User’s Metabolic and Muscular Effort" Sensors 24, no. 11: 3305. https://doi.org/10.3390/s24113305
APA StyleMonteiro, S., Figueiredo, J., Fonseca, P., Vilas-Boas, J. P., & Santos, C. P. (2024). Human-in-the-Loop Optimization of Knee Exoskeleton Assistance for Minimizing User’s Metabolic and Muscular Effort. Sensors, 24(11), 3305. https://doi.org/10.3390/s24113305