This retroreflectivity analysis investigates 160 traffic signs, comprising 111 classified under RA1 and 49 under RA2. This study delves into the intricate details of retroreflective coefficients associated with these distinct sign classes, aiming to provide valuable insights into the visibility and compliance of traffic signs on roadways. By scrutinizing this extensive dataset, we seek to contribute to understanding retroreflectivity performance, offering implications for road safety standards and optimizing signage for enhanced visibility and communication on road networks.
4.1.1. Criteria
The data analysis developed in multiple stages, applying specific criteria to assess the retroreflective coefficients of all traffic signs. The measurements were then carefully compared with the standards outlined for Class RA1 and RA2, as specified in the European standard EN 12899-1. This standard, emphasizing a minimum retroreflective coefficient value, should not fall below 70%, except for the white color, as indicated in
Table 1 [
22]. Strict adherence to this established standard ensures the rigor and reliability of our assessment of traffic sign visibility, aligning our research with recognized industry criteria.
The analysis revealed significant trends when evaluating the retroreflective coefficients of the 111 RA1 traffic signs and 49 RA2 signs according to the European standard EN 12899-1. Within the RA1 category, 54.1% (60 signs) met the required standards, demonstrating a commendable adherence to reflective performance criteria. However, a considerable proportion of RA1 signs (45.9% or 51) fell outside the standard ranges. This observation highlights the need for a thorough examination to identify potential factors contributing to this deviation and implement corrective measures. On the other hand, the RA2 signs showed a higher compliance rate, with 87.8% (43 signs) meeting the specified standards. However, 12.2% (6 signs) of RA2 signs displayed retroreflective coefficients beyond the acceptable ranges, indicating the need for a focused investigation into sources of non-compliance. The comprehensive evaluation of 160 signs, encompassing both RA1 and RA2 categories, emphasizes the importance of thoroughly assessing manufacturing and maintenance processes. This scrutiny is crucial to adhere to the EN 12899-1 standard consistently. It forms a critical basis for ongoing quality improvement initiatives within traffic sign materials and reflective performance (see
Table 2 for detailed results).
Based on the visual scape,
Table 3 lists non-conforming traffic signs in the RA1 and RA2 categories, differentiating between the background and legend and integrating both aspects. In the RA1 category, out of the 51 signs falling outside the standard ranges, a substantial majority (66.7%) pertain to non-compliance in the legend, followed by 29.4% in the background and a minor 3.9% in both elements. This disparity underscores the potential challenges related to the text or symbolic elements impacting retroreflective performance. Conversely, in the RA2 category, where there are only six instances of non-conforming signs, all instances (100%) are attributed to issues with the legend. The absence of non-conformities in the background for RA2 signs highlights a distinct pattern, potentially pointing to specific challenges related to text legibility or material characteristics. This nuanced analysis provides valuable insights for targeted interventions in sign design and production processes to enhance retroreflective performance, particularly in the legend element.
Table 4 analyzes the non-conformance of retroreflective coefficients within the RA1 and RA2 traffic sign categories, organized by sign color. Among RA1 signs, white signs have the highest non-conformance rate at 43.3%, followed by red signs at 7.8%. In contrast, blue signs have a relatively low non-conformance rate of 6.3%. The high non-conformance rate for white and red signs suggests potential challenges in achieving retroreflective standards for these colors. Interestingly, gray, green, and yellow RA1 signs consistently meet standards, indicating a strong reflective performance in these colors. In the RA2 category, all sign colors conform to standards, indicating a positive trend in reflective efficiency.
4.1.2. Reflectivity Distribution
Figure 8 provides the distribution of reflective performance within the measured range. The distribution across the specified coefficient groups showcases a predominantly higher concentration within the lower ranges, with 87 signs falling within the 0–49.99 range. However, as the coefficients increase, the frequency diminishes, demonstrating a decreasing trend in retroreflective efficiency. This observation suggests a potential variability in the retroreflective properties of the examined signs, emphasizing the need for an examination of manufacturing processes and materials to ensure uniform adherence to visibility standards.
The retroreflective coefficients measured for the legend and background elements of traffic signs, as shown in
Table 5, provide insights into the reflective properties of these signs. The findings indicate considerable variability in retroreflective performance among the legend and background elements, with relative standard deviations well over 100%. This reflects significant fluctuations in retroreflectivity within the sample. The average retroreflective coefficient between the legend and background elements is 106, with a standard deviation of 126 and a relative standard deviation of 119%. While this average represents the traffic signs’ overall reflective performance, the sample’s notable variability highlights the complexity and variability inherent in retroreflective properties.
An independent two-sample
t-test was conducted to examine whether there is a significant difference in mean retroreflectivity between the legend and background. The analysis was performed using the Statistical Package for the Social Sciences (SPSS) software, version 27.0.1, and the results are presented in
Table 6. With a significance level (α) of 0.05, a two-tailed test, and 318 degrees of freedom (df), the critical value (CV) from the Student’s t-distribution was calculated to be 1.9675. The calculated t-value (t-statistic = 1.872) is lower than the critical value (1.9675), indicating no statistically significant difference. The
p-value (0.06) exceeds the chosen significance level (α = 0.05). Consequently, the 95% confidence interval for the difference in means includes zero, providing strong evidence to accept the null hypothesis and conclude that there is no noticeable difference in the average retroreflectivity between the legend and background. Therefore, the claim that there is no difference in means is supported. However, based on the data, it can be inferred that the retroreflectivity values for the legend and background are similar. Notably, most backgrounds (57.5%) were blue, so further research is needed to investigate the potential impact of background color on retroreflectivity levels.
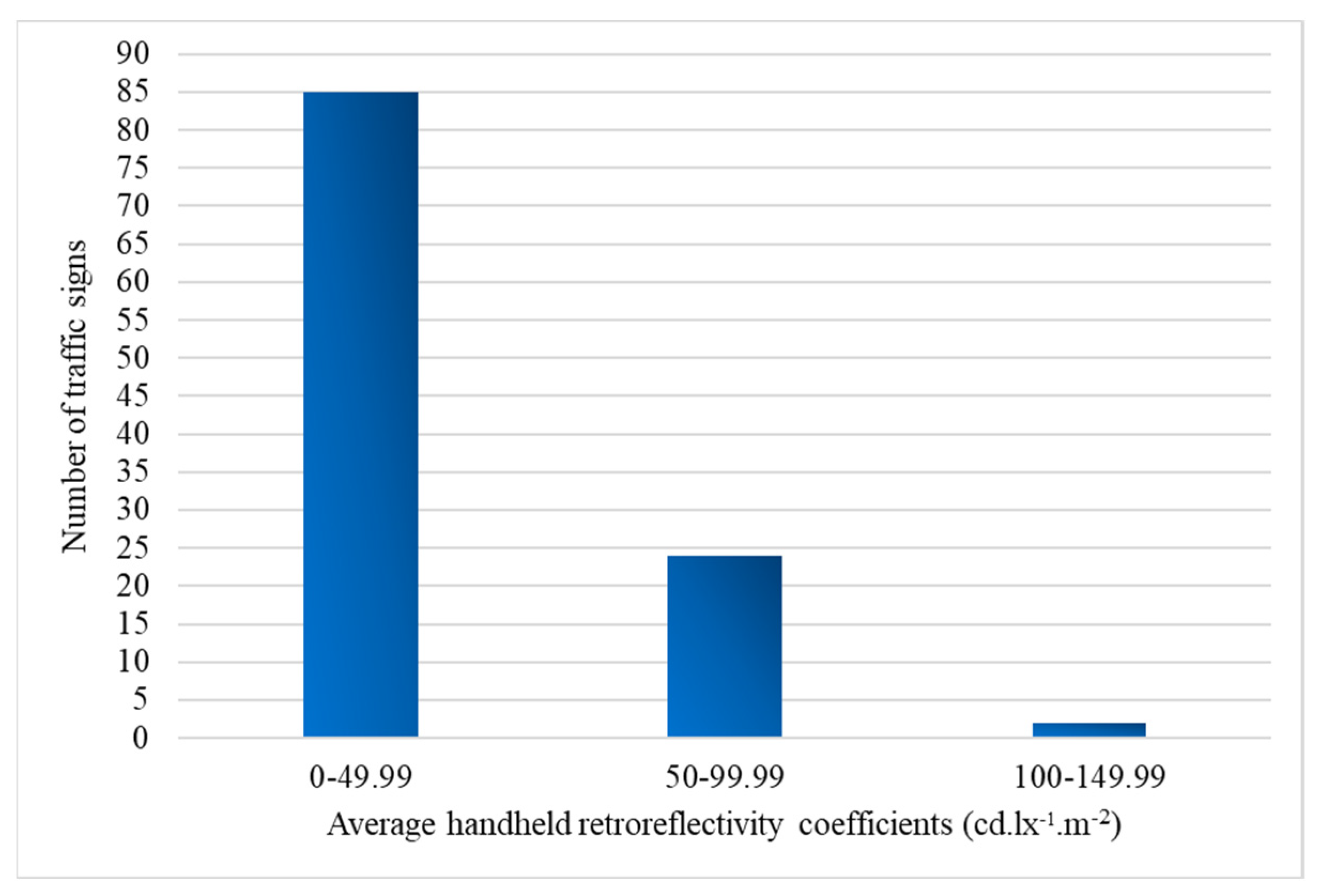
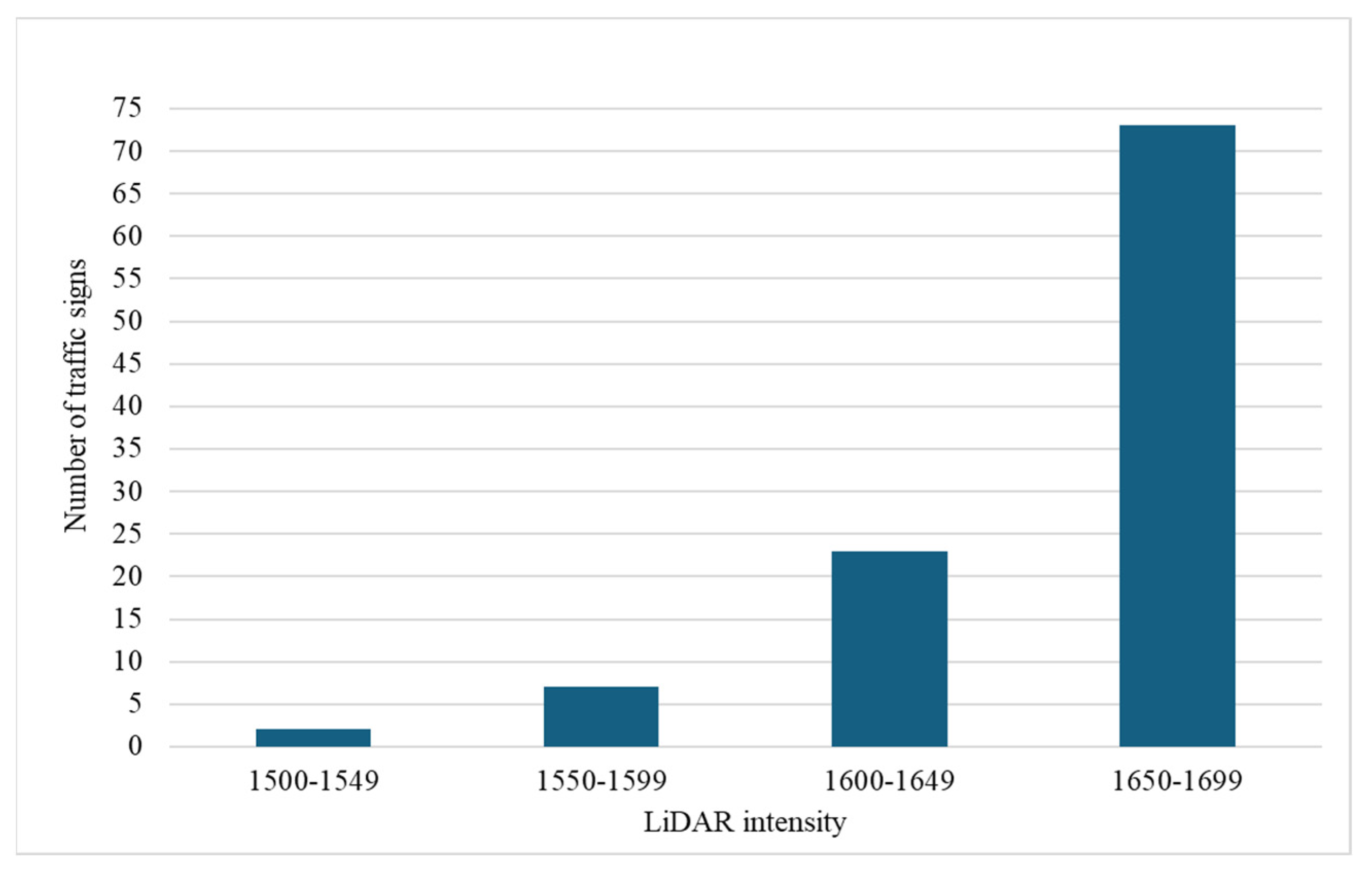
Figure 9 focuses on RA1 traffic signs and shows a distinct pattern. Most signs (85 in total) have retroreflective coefficients falling within the 0–49.99 range, consistent with the overall trend observed in all signs. However, 24 RA1 signs deviate from this trend, with coefficients falling in the 50–99.99 range.
Figure 10, dedicated to RA2 traffic signs, shows a more widely distributed pattern across various retroreflective coefficient ranges. RA2 signs demonstrate a more balanced representation in lower and higher coefficient groups, with a notable concentration in the mid-range categories. RA2 signs in the higher coefficient ranges suggest a consistent reflective performance within this class.
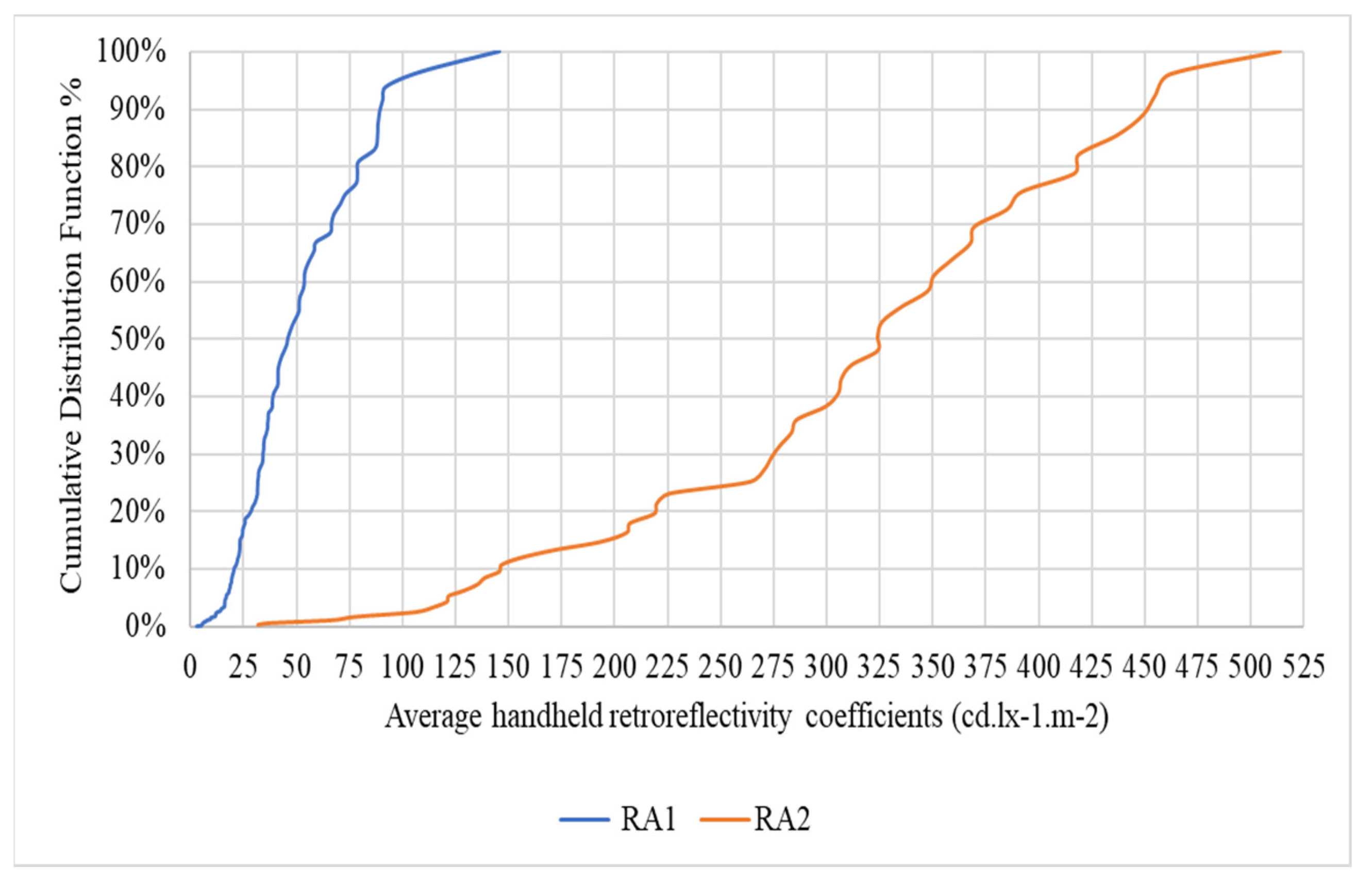
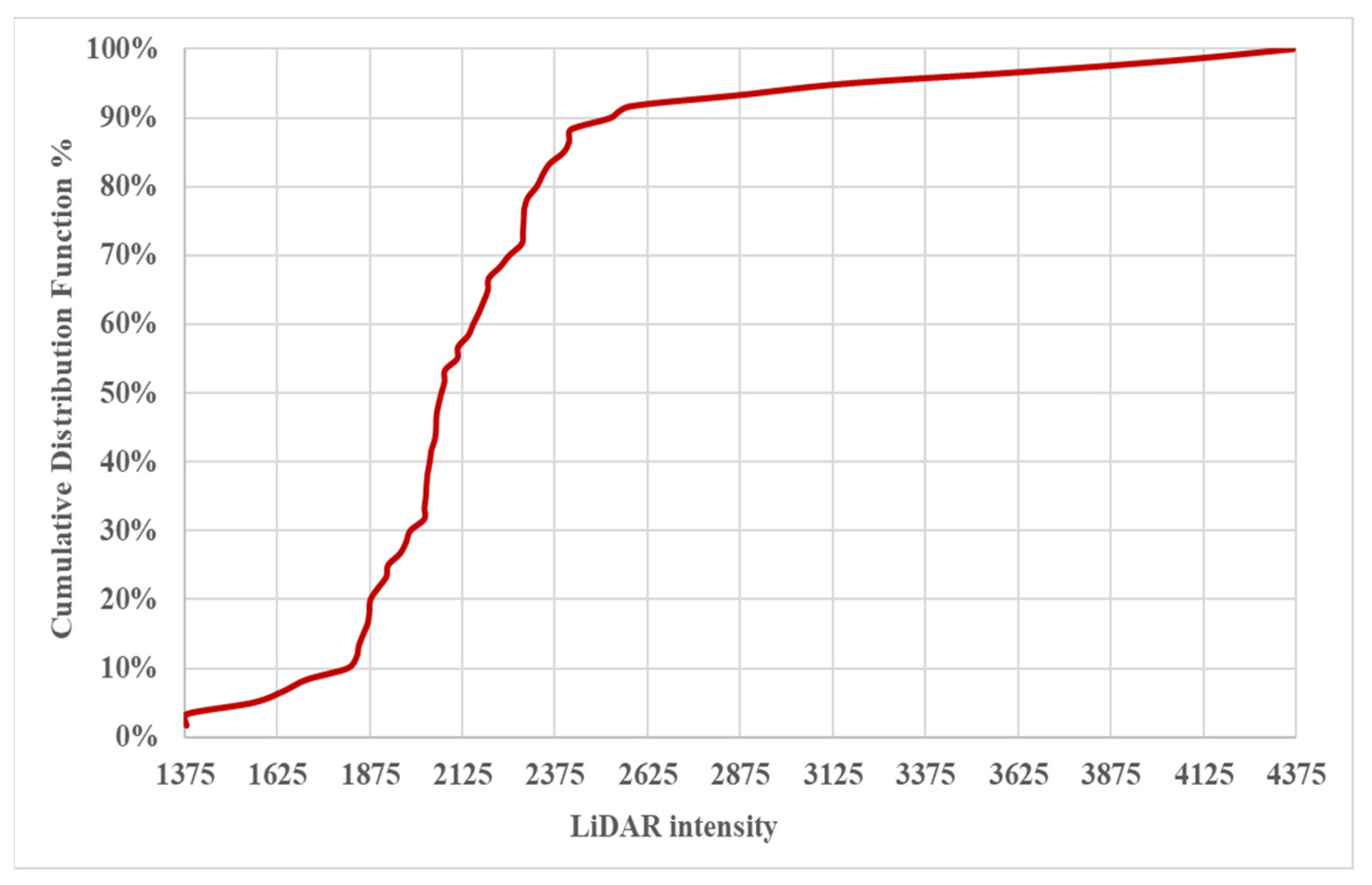
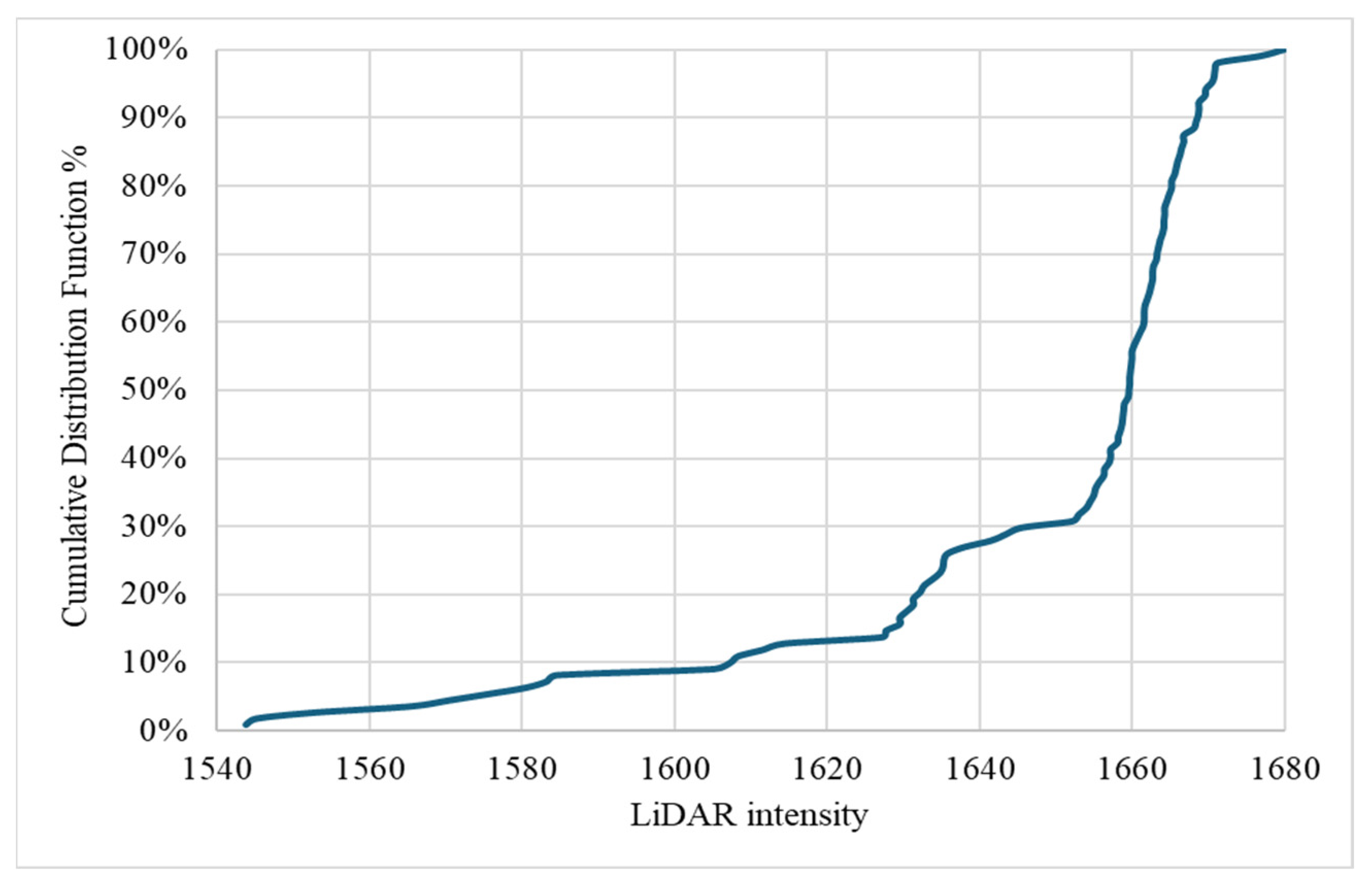
The Cumulative Distribution Function (CDF) analysis for RA1 and RA2 traffic signs provides a dynamic perspective on the distribution of retroreflective coefficients within these distinct categories, as shown in
Figure 11. In the case of RA1 signs, the CDF reveals a gradual increase, with the majority (85%) exhibiting coefficients within the range of 0–49.99. This suggests a consistent prevalence of lower retroreflective coefficients within the RA1 class. On the other hand, the CDF for RA2 signs illustrates a more balanced distribution, reflecting a broader range of coefficients. Notably, 81.6% of RA2 signs exhibit coefficients within the range of 0–99.99, emphasizing the significance of mid-range reflective performance within this category.
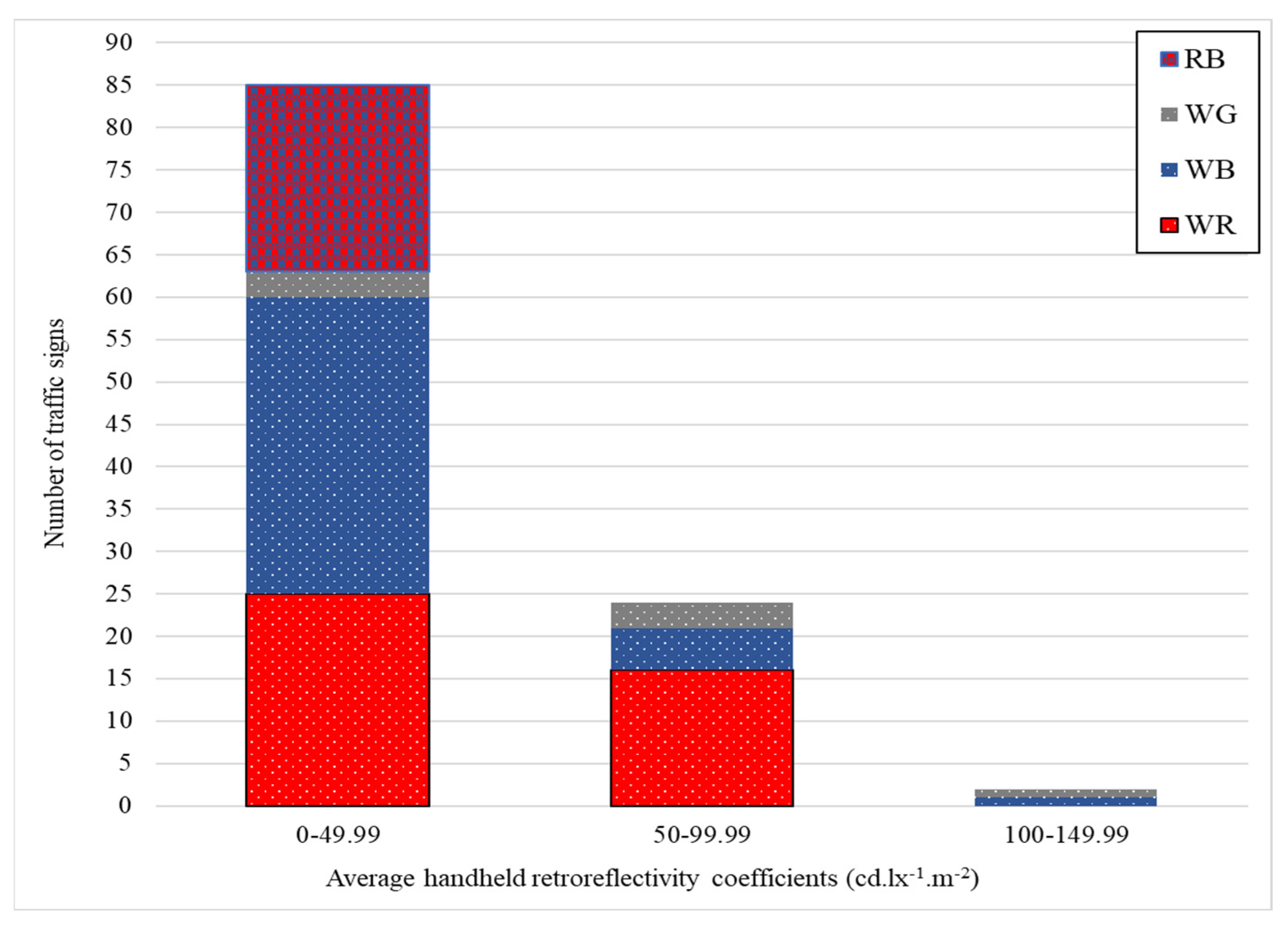
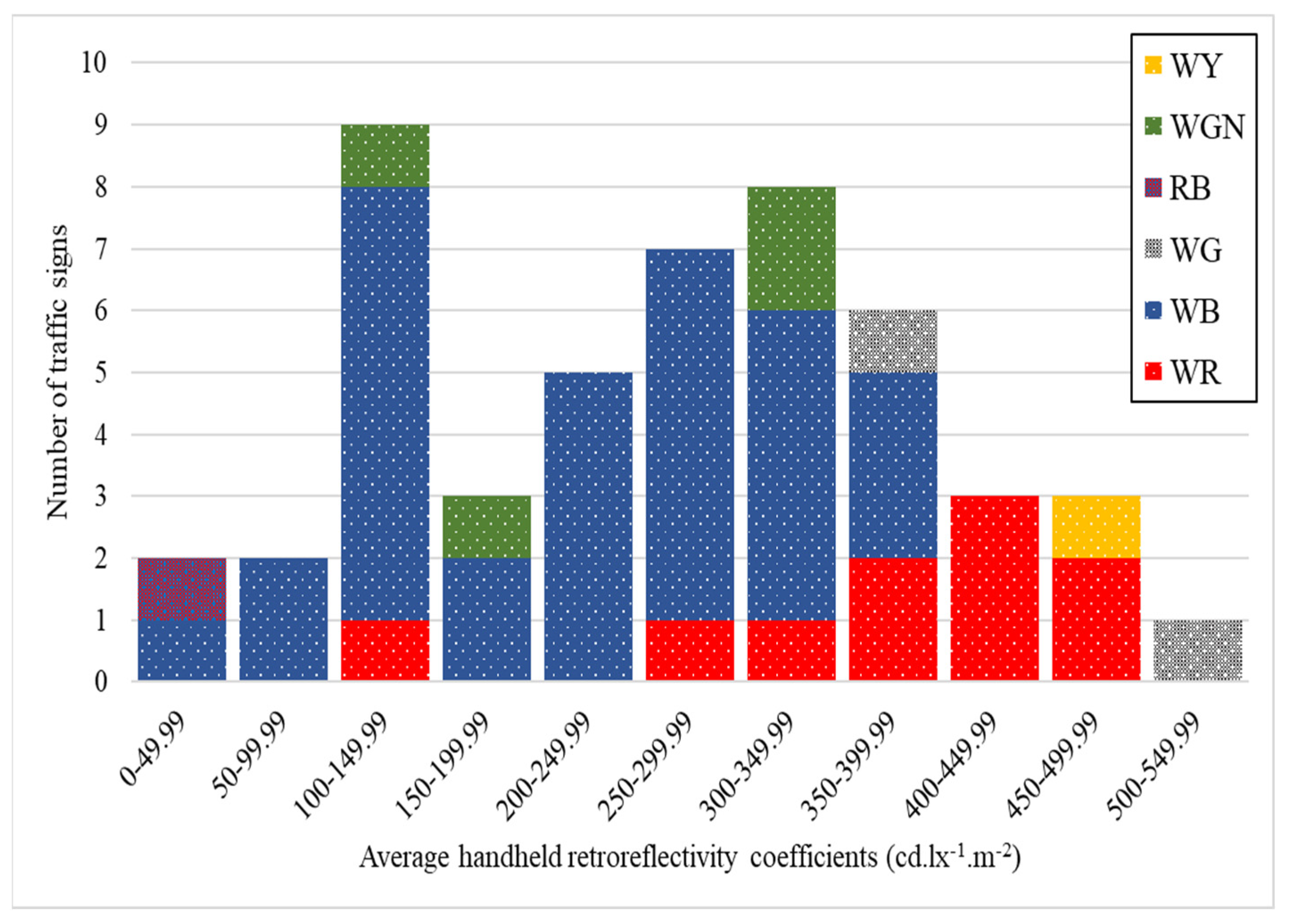
Figure 12 and
Figure 13 visually represent the distribution of retroreflective coefficients in RA1 and RA2 signs across various color groups. Each color group is further segmented based on specified coefficient ranges. The distinctive colors, namely WR (white and red), WB (white and blue), WG (white and gray), RB (red and blue), WGN (white and green), and WY (white and yellow), offer a clear visual representation of the retroreflective performance within each color category. These illustrations are a valuable tool for assessing variations in retroreflective coefficients across different color combinations, enabling a quick and comprehensive understanding of the reflective characteristics within the RA1 and RA2 signs classification.
Table 7 and
Table 8 analyze the retroreflective coefficients for RA1 and RA2 traffic signs, including their legends and background elements. The findings indicate considerable variability in retroreflective performance among legends, with a relative standard deviation of 80%, and backgrounds, with a relative standard deviation of 97%, within the RA1 category. In comparison, for RA2 signs, the mean retroreflective coefficient for legends is notably higher at 306, with a standard deviation of 158.8 and a relative standard deviation of 52%. Similarly, the mean retroreflective coefficient for backgrounds is 221, with a standard deviation of 221.9 and a relative standard deviation of 101%. The average retroreflective coefficient between legend and background elements for RA2 signs is 263, with a standard deviation of 123.6 and a relative standard deviation of 47%. These results underscore a significant increase in retroreflectivity for RA2 signs compared to RA1 signs, with retroreflectivity data for RA2 being two to four times higher or even more.
The reflective characteristics of RA1 and RA2 were analyzed to explore potential differences in their mean reflectivity levels. Using a two-sample t-test, a t-statistic of −18.49 (where the negative sign denotes a lower mean) was obtained, surpassing the critical value of 1.9751, with a p-value approaching zero, lower than the significance level (α = 0.05). Additionally, the 95% confidence interval for the difference in means excludes zero, leading to the rejection of the null hypothesis. Therefore, there is a significant difference in mean reflectivity between RA1 and RA2. Specifically, RA2 signs display, on average, a significantly higher retroreflectivity compared to RA1 signs. This observation highlights the crucial role of retroreflective properties in selecting and maintaining traffic signs to ensure optimal visibility and safety. The authorities responsible for traffic sign management should consider the superior retroreflective attributes of RA2 signs for enhanced visibility, especially under low-light conditions. Furthermore, implementing regular monitoring and maintenance initiatives is essential to maintain the effectiveness of retroreflective materials on traffic signs over time, thereby improving road safety for both motorists and pedestrians.
Subsequent t-tests were conducted on the legend and background retroreflectivity of RA1 and RA2 to investigate possible variations. For RA1, the analysis produced a t-statistic of 1.94 with a corresponding p-value of 0.054, while for RA2, the t-statistic was 2.18 with a p-value of 0.032, both under α = 0.05. In the case of RA1, the observed p-value surpassed the predetermined threshold, indicating an absence of statistically significant difference in mean retroreflectivity between the legend and background. Conversely, for RA2, the computed p-value fell below the threshold, signifying a notable difference in mean retroreflectivity between the legend and background. These findings suggest potential differences in retroreflective performance between different legends and backgrounds, necessitating further investigation to clarify underlying factors influencing retroreflectivity levels.
Furthermore, the analysis reveals significant differences in retroreflectivity between colors, with RA2 signs exhibiting notably higher retroreflective coefficients than RA1 signs. Additionally, the susceptibility of retroreflectivity measurements to pointwise variability emphasizes the necessity for meticulous measurement techniques and quality control measures to ensure accurate and consistent assessment of retroreflective properties.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}