
Multi-Phase Fusion for Pedestrian Localization Using Mass-Market GNSS and MEMS Sensors



Abstract
1. Introduction
- We adopt RTD instead of single-point GNSS in traditional fusion schemes, and propose a multipath mitigation algorithm that can be implemented on smartphones based on the MPPE and DDCMC filters, which exploits the CN0R and DDCMC observables;
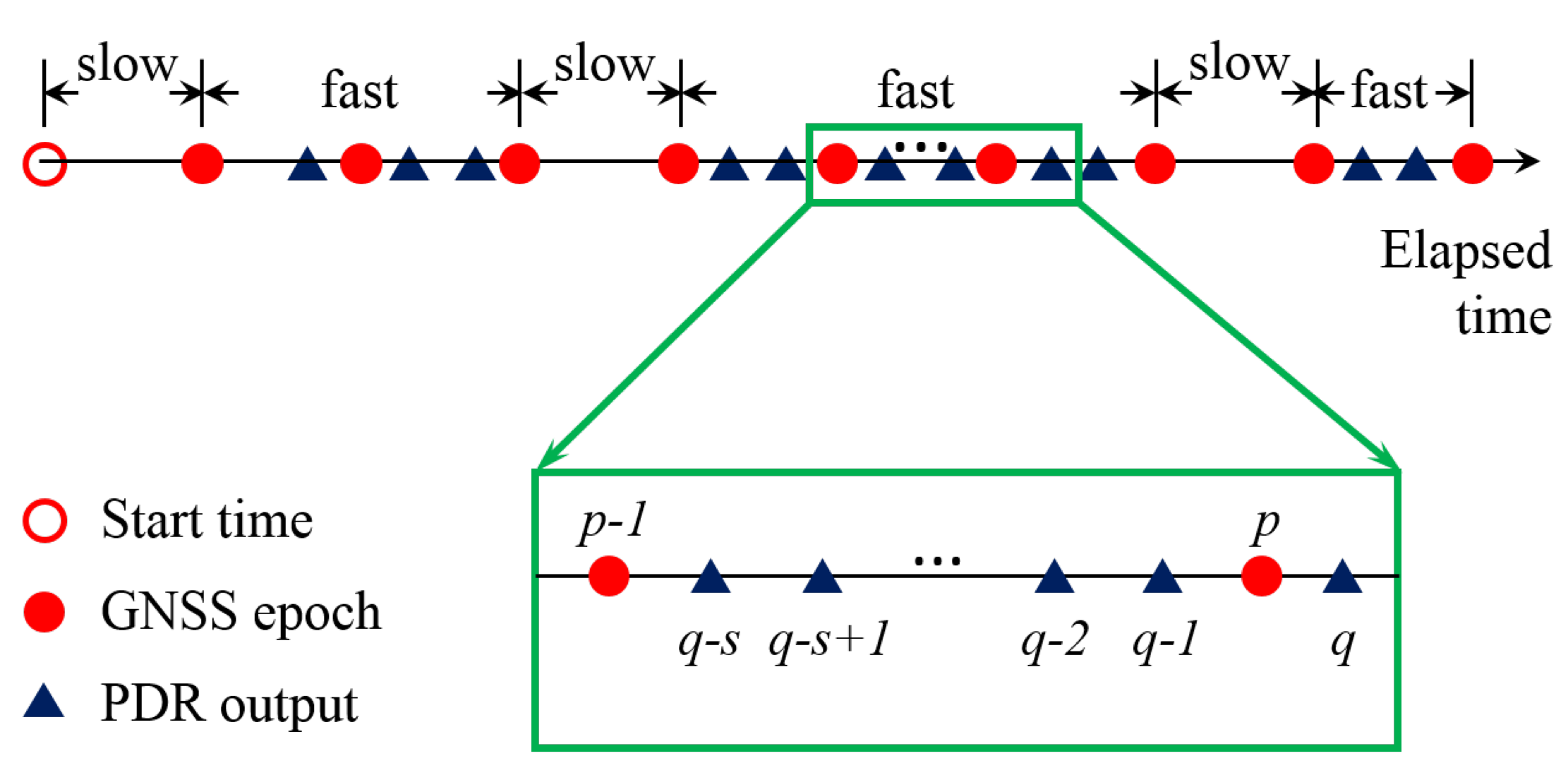
- For the issue of different GNSS and PDR output formats, we design the coordinate transformation to convert GNSS data into a dead reckoning form, and the data synchronization to fix the results of PDR as periodic output;
- Before the conventional fusion filtering, we add the stride length and heading estimation modules to suppress the long-time drift of the MEMS sensors, which smooths the drift-free and noisy GNSS outputs with the drifted and low-noise PDR outputs.
2. Related Work
3. Fusion Framework and Error Analysis
3.1. Implementations of the Fusion Framework
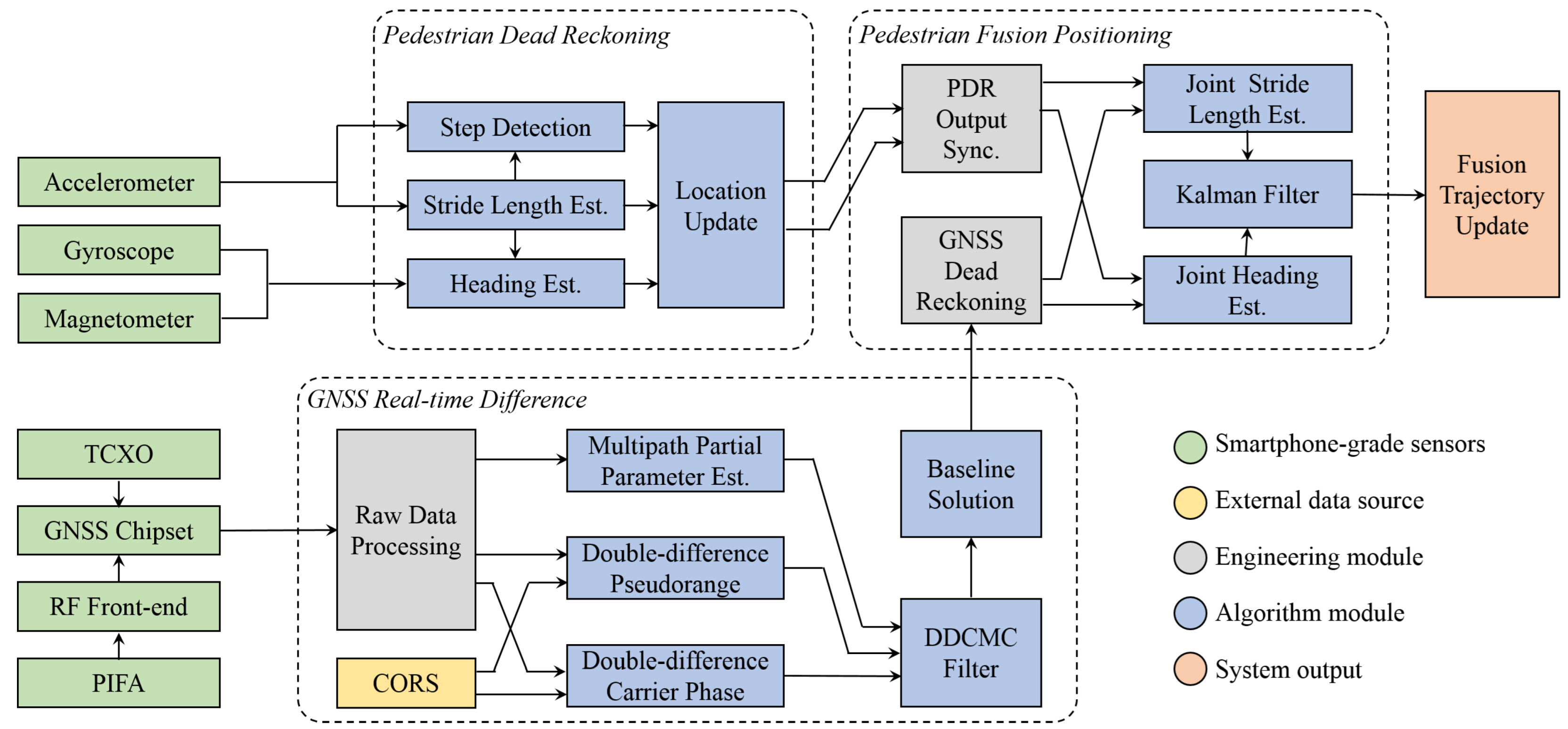
- The inputs of PDR come from 9-axis MEMS MARG sensors, where the accelerometer data are used for step detection and stride length estimation, and the gyroscope and magnetometer data are used for heading estimation. Finally, the estimated stride length and heading are fed into the location update module to obtain the 2D coordinates of the pedestrian.
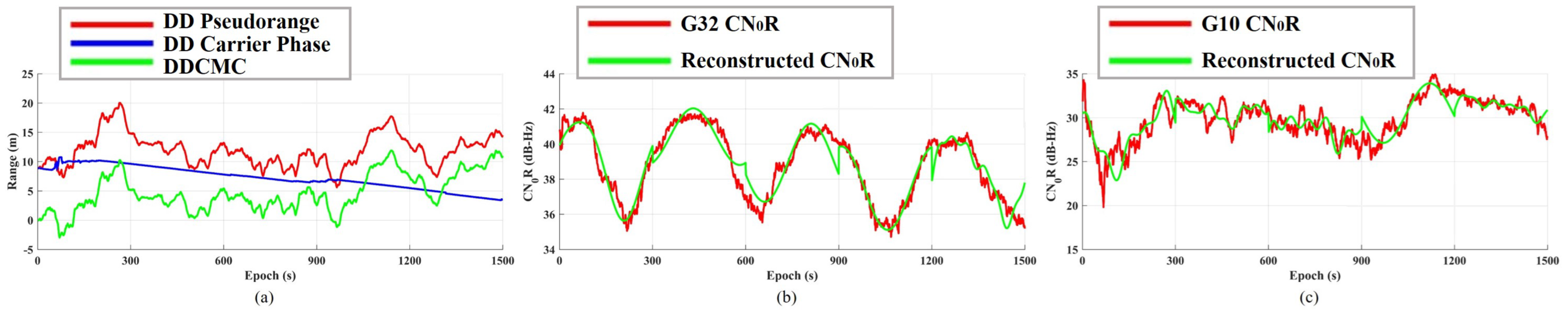
- GNSS RTD refers to the short-baseline pseudorange double-difference, and so, by receiving external CORS data to construct a double-difference model with the local data, most of the observation errors can be eliminated. Due to the poor performance of GNSS hardware, careful raw data processing is required before using them. MPPE and DDCMC filter are applied here to mitigate the multipath error, and the baseline solution can be obtained by solving the double-difference observation equation;
- Before fusing the GNSS and PDR data, their coordinate formats and timestamps need to be aligned, and these are performed in GNSS dead reckoning and PDR output synchronization. Then, the stride length and heading of the two subsystems are fed into their respective joint estimation modules. Finally, a KF is used to complete the fusion filtering, and the fusion trajectory update module outputs the positioning results.
3.2. Error Analysis of the Fusion System
3.2.1. Cumulative Error of PDR
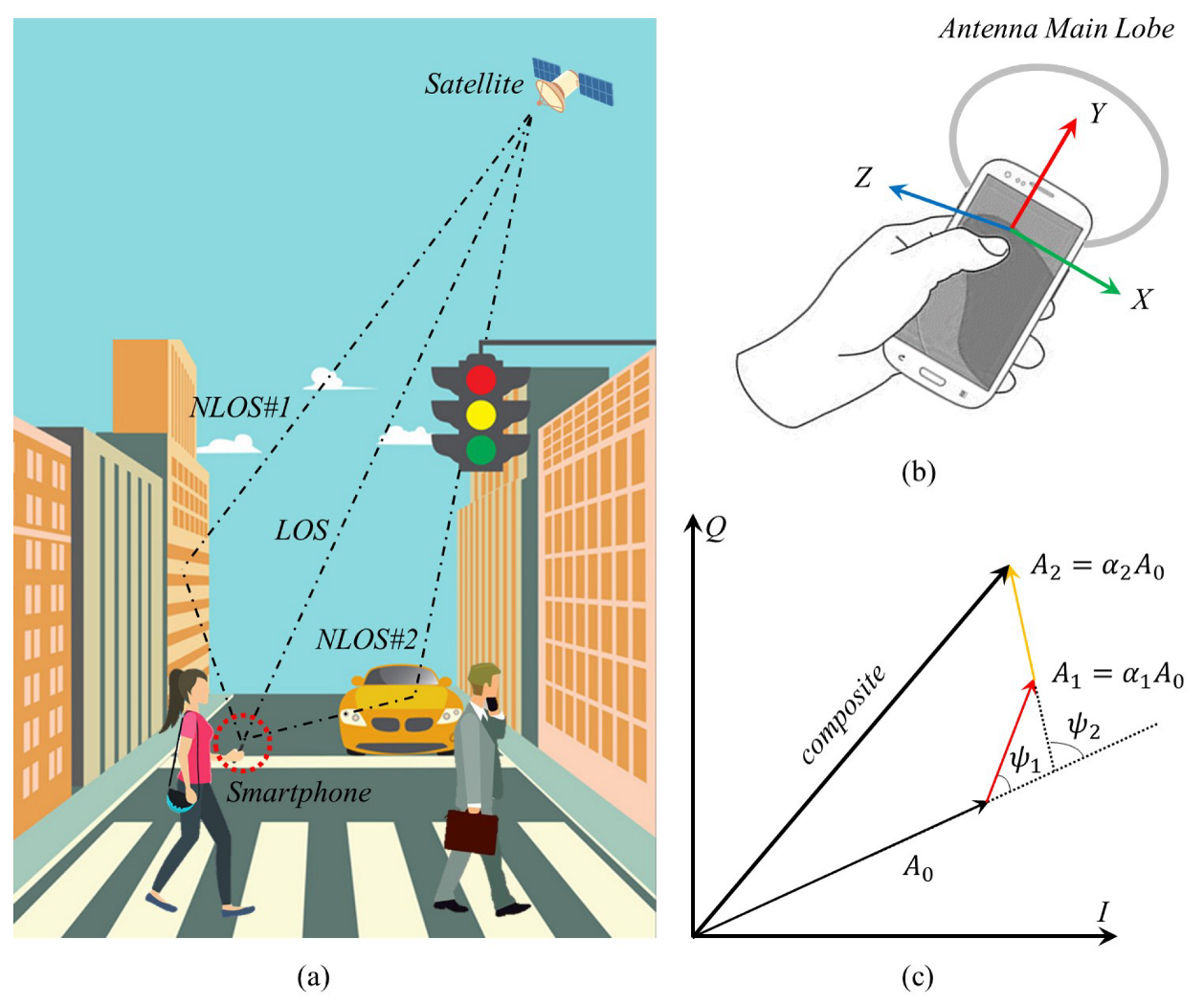
3.2.2. Influence of the GNSS Multipath on Observables
- : the ratio of the signal amplitude of NLOS to that of LOS,
- : the phase shift of NLOS with respect to LOS,
- : an additional path length of NLOS with respect to LOS.
4. Pedestrian Dead Reckoning
4.1. Step Detection
4.2. Stride Length Estimation
4.3. Heading Estimation
5. GNSS Real-Time Difference
5.1. GNSS Pseudorange Double-Difference
5.2. Double-Difference Code-Minus-Carrier
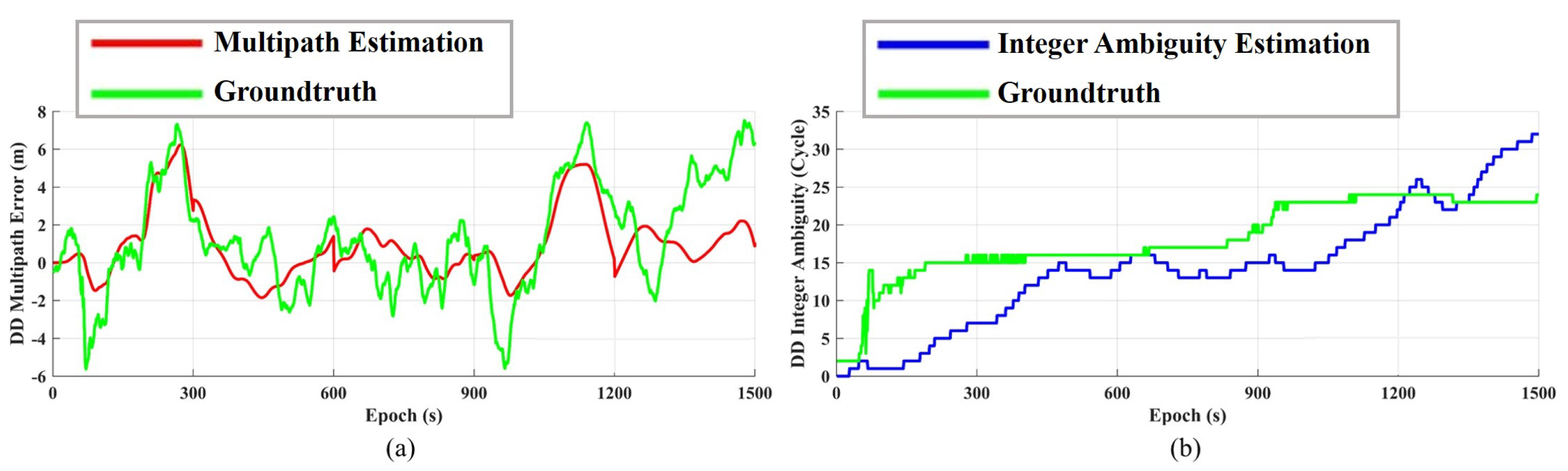
5.3. Multipath Partial Parameters Estimation
5.4. DDCMC Filter Design
6. Methodology of GNSS/PDR Fusion
6.1. GNSS Dead Reckoning
6.2. PDR Output Synchronization
6.3. Joint Stride Length and Heading Estimation
6.4. Fusion Filtering and Trajectory Updating
7. Experiments and Results
7.1. Experimental Setup
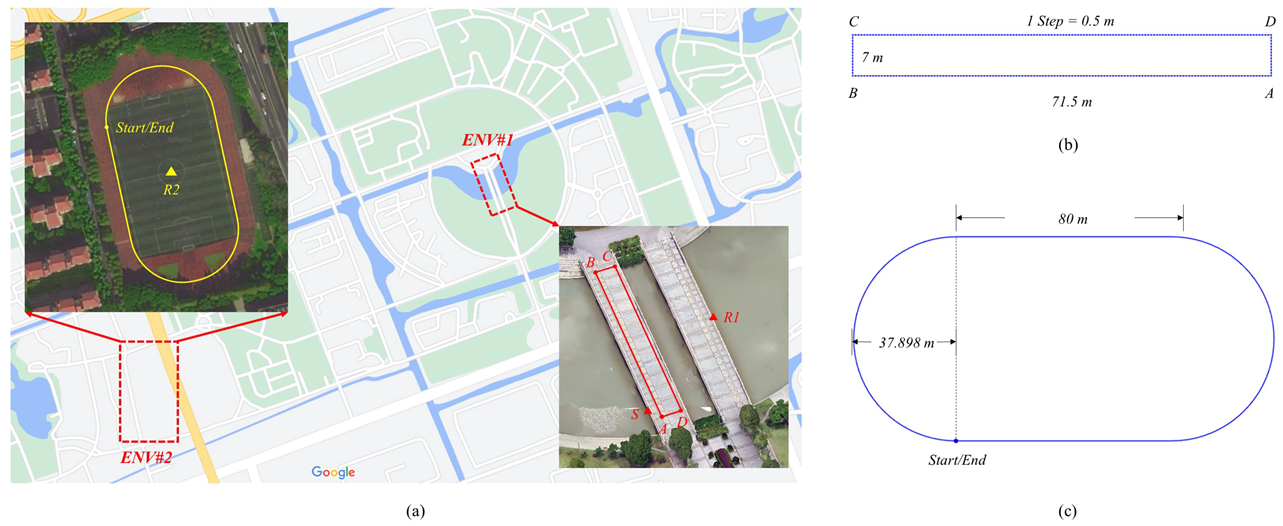
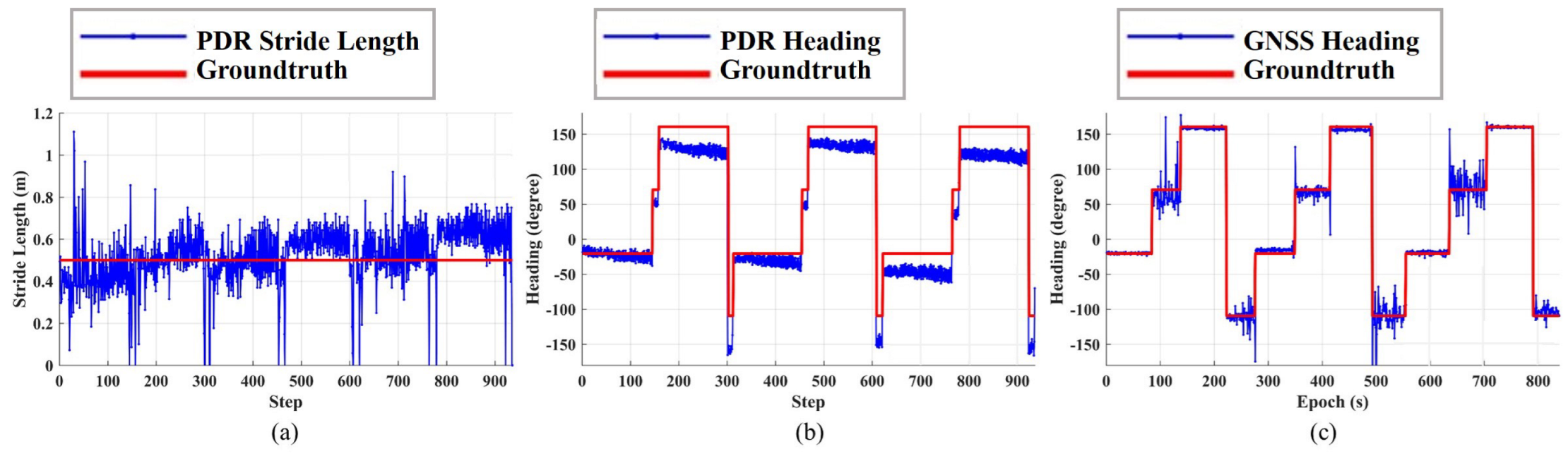
- Control point test: See Figure 4a,b; the trajectory of our selected control point test is a rectangle (see ENV♯1). There are markers on the ground, and the distance between the two markers is 0.5 m, which also equals the stride length of each step. The long side of the rectangle has 143 steps, and the short side has 14 steps. The four corner points (A, B, C, and D) of the rectangle are measured using our RTK devices, so that we can obtain the groundtruth of the heading for each edge. The reference station is set at R1.
- Static multipath test: See Figure 4a; this test constructs a pair of double-difference observations, where the reference station is located at R1 and the test smartphone is located at S. The groundtruth of these two locations are measured in advance using RTK. R1 is located in the middle of the bridge, away from the reflector, so that the reference station is almost unaffected by the multipath. S is near the surrounding obstacles, such as the trees in the south, constituting a multipath reflector, and so the test smartphone receives a more severe multipath impact.
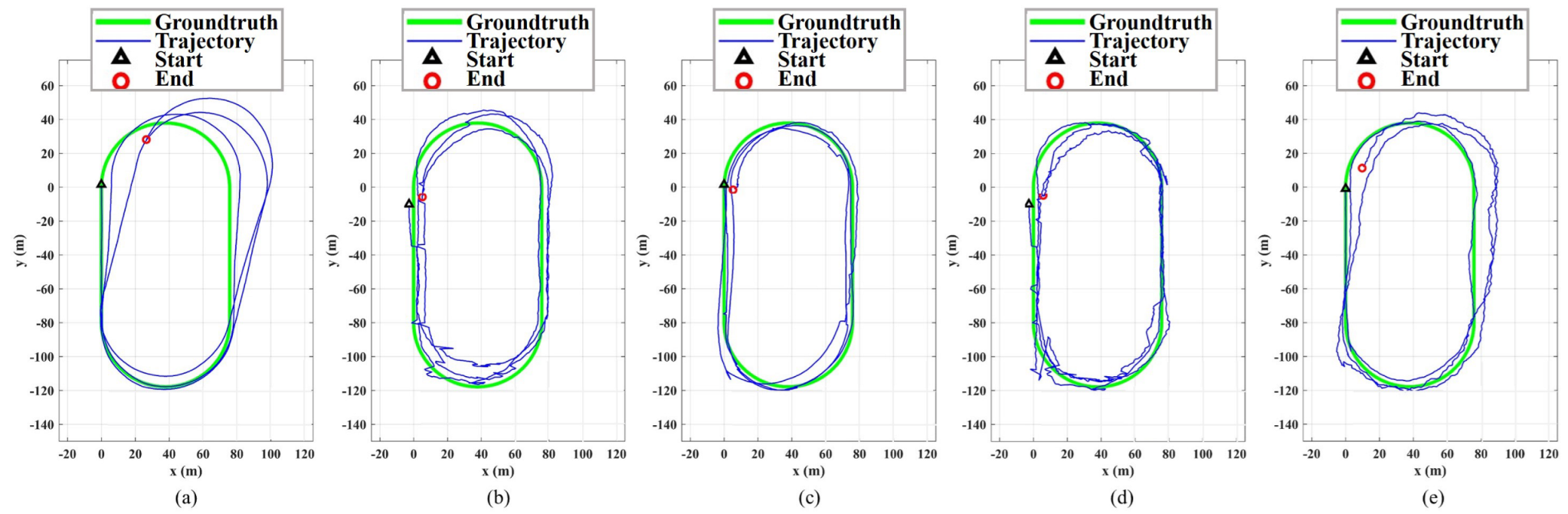
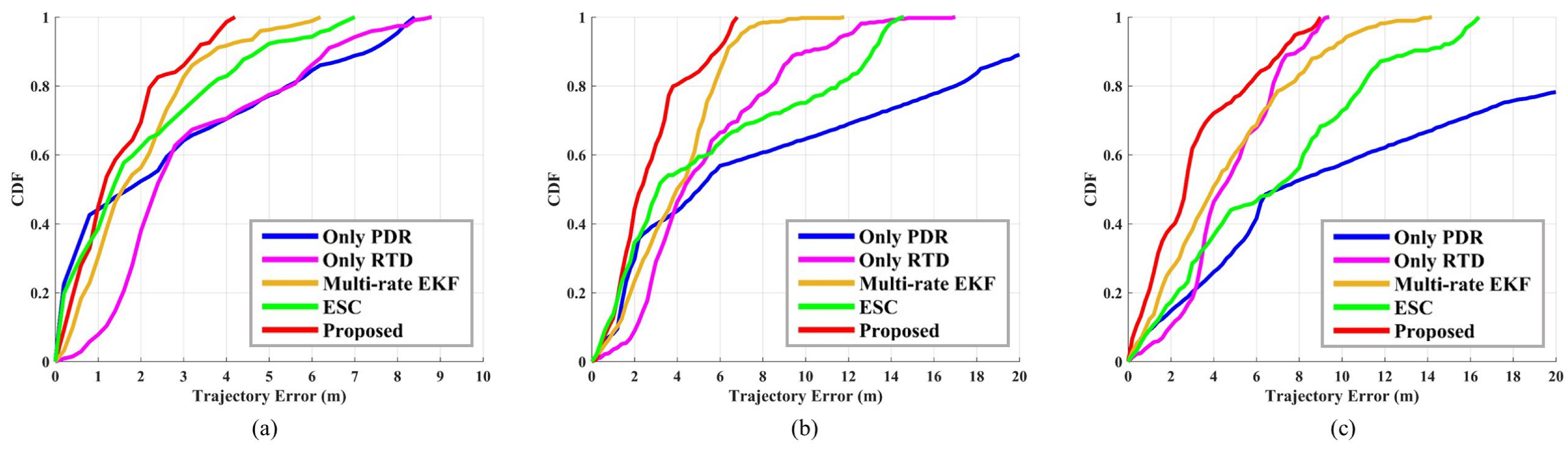
- GNSS/PDR fusion test: See Figure 4a,c; the trajectory of our selected fusion test is a standard 400 m track (see ENV♯2). The reference station is set at R2.
7.2. Control Point Test
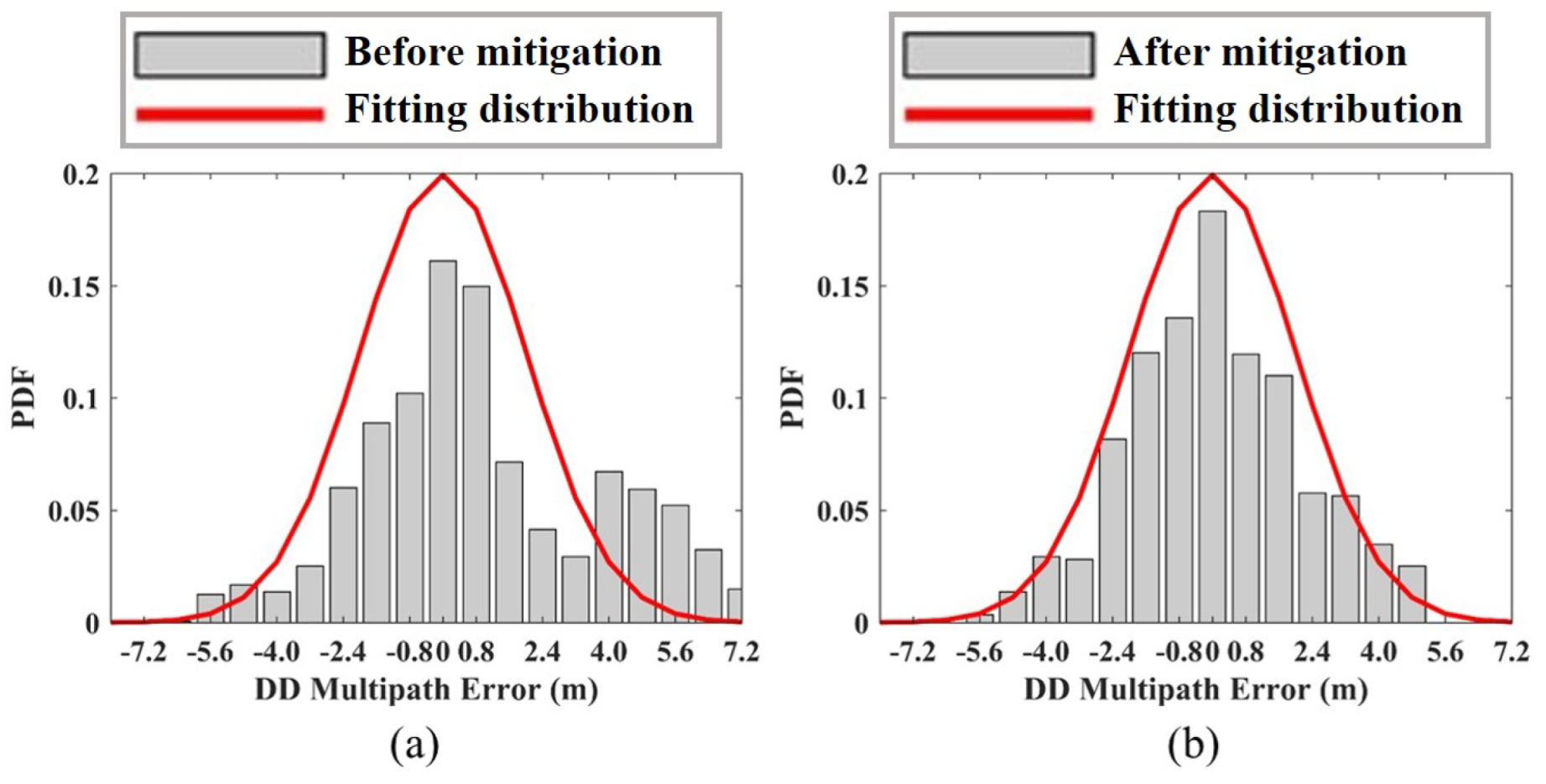
7.3. Static Multipath Test
7.4. GNSS/PDR Fusion Test
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Humphreys, T.E.; Murrian, M.; van Diggelen, F.; Podshivalov, S.; Pesyna, K.M. On the feasibility of cm-accurate positioning via a smartphone’s antenna and GNSS chip. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 232–242. [Google Scholar]
- Pesyna, K.M.; Heath, R.W.; Humphreys, T.E. Centimeter positioning with a smartphone-quality GNSS antenna. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 1568–1577. [Google Scholar]
- Pesyna, K.M.; Kassas, Z.M.; Heath, R.W.; Humphreys, T.E. A phase-reconstruction technique for low-power centimeter-accurate mobile positioning. IEEE Trans. Signal Process. 2014, 62, 2595–2610. [Google Scholar]
- Ansari, K.; Jamjareegulgarn, P. Effect of Weighted PDOP on Performance of Linear Kalman Filter for RTK Drone Data. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–4. [Google Scholar] [CrossRef]
- Saeedi, S.; El-Sheimy, N. Activity recognition using fusion of low-cost sensors on a smartphone for mobile navigation application. Micromachines 2015, 6, 1100–1134. [Google Scholar] [CrossRef]
- Gobana, F.W. Survey of Inertial/magnetic Sensors Based pedestrian dead reckoning by multi-sensor fusion method. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 17–19 October 2018; pp. 1327–1334. [Google Scholar]
- Li, X.; Wei, D.; Zhang, W.; Xu, Y.; Yuan, H. Integrated PDR/GNSS at Different Times for Pedestrian Localization in Urban Canyon. IEEE Access 2021, 9, 22698–22710. [Google Scholar] [CrossRef]
- Zhang, Q.; Niu, X.; Shi, C. Impact assessment of various IMU error sources on the relative accuracy of the GNSS/INS systems. IEEE Sens. J. 2020, 20, 5026–5038. [Google Scholar] [CrossRef]
- Gonzalez, R.; Dabove, P. Performance assessment of an ultra low-cost inertial measurement unit for ground vehicle navigation. Sensors 2019, 19, 3865. [Google Scholar] [CrossRef]
- Jirawimut, R.; Ptasinski, P.; Garaj, V.; Cecelja, F.; Balachandran, W. A method for dead reckoning parameter correction in pedestrian navigation system. IEEE Trans. Instrum. Meas. 2003, 52, 209–215. [Google Scholar] [CrossRef]
- Jimenez, A.; Seco, F.; Prieto, C.; Guevara, J. A comparison of pedestrian dead-reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 37–42. [Google Scholar]
- Wu, Y.; Zhu, H.B.; Du, Q.X.; Tang, S.M. A survey of the research status of pedestrian dead reckoning systems based on inertial sensors. Int. J. Autom. Comput. 2019, 16, 65–83. [Google Scholar] [CrossRef]
- Pirazzi, G.; Mazzoni, A.; Biagi, L.; Crespi, M. Preliminary performance analysis with a GPS+ Galileo enabled chipset embedded in a smartphone. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, Oregon, 25–29 September 2017; pp. 101–115. [Google Scholar]
- Massarweh, L.; Fortunato, M.; Gioia, C. Assessment of real-time multipath detection with Android raw GNSS measurements by using a xiaomi mi 8 smartphone. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1111–1122. [Google Scholar]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Signal characterization and assessment of code GNSS positioning with low-power consumption smartphones. GPS Solut. 2019, 23, 98. [Google Scholar] [CrossRef]
- Wanninger, L.; Hebelbarth, A. GNSS code and carrier phase observations of a Huawei P30 smartphone: Quality assessment and centimeter-accurate positioning. GPS Solut. 2020, 24, 64. [Google Scholar] [CrossRef]
- Petukhov, N.; Kulikov, R.; Chugunov, A. Satellite Navigation of Smartphones in Relative Mode. In Proceedings of the 2019 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Vladivostok, Russia, 1–4 October 2019; pp. 1–6. [Google Scholar]
- Angrisano, A. GNSS/INS Integration Methods. Ph.D. Thesis, Universita’degli Studi di Napoli PARTHENOPE, Naple, Italy, 2010. Volume 21. [Google Scholar]
- Sheta, A.; Mohsen, A.; Sheta, B.; Hassan, M. Improved localization for Android smartphones based on integration of raw GNSS measurements and IMU sensors. In Proceedings of the 2018 International Conference on Computer and Applications (ICCA), Beirut, Lebanon, 25–26 August 2018; pp. 297–302. [Google Scholar]
- Kang, W.; Han, Y. SmartPDR: Smartphone-based pedestrian dead reckoning for indoor localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Tian, Q.; Salcic, Z.; Wang, K.I.-K.; Pan, Y. A multi-mode dead reckoning system for pedestrian tracking using smartphones. IEEE Sens. J. 2016, 16, 2079–2093. [Google Scholar] [CrossRef]
- Park, S.; Lee, J.H.; Chan, G.P. Robust pedestrian dead reckoning for multiple poses in smartphones. IEEE Access 2021, 9, 1. [Google Scholar] [CrossRef]
- Darugna, F.; Wübbena, J.; Ito, A.; Wübbena, T.; Wübbena, G.; Schmitz, M. RTK and PPP-RTK using smartphones: From short-baseline to long-baseline applications. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3932–3945. [Google Scholar]
- Shinghal, G.; Bisnath, S. Conditioning and PPP processing of smartphone GNSS measurements in realistic environments. Satell. Navig. 2021, 2, 10. [Google Scholar] [CrossRef]
- Yi, D.; Bisnath, S.; Naciri, N.; Vana, S. Effects of ionospheric constraints in Precise Point Positioning processing of geodetic, low-cost and smartphone GNSS measurements. Measurement 2021, 183, 109887. [Google Scholar] [CrossRef]
- Zhang, R.; Qin, H.; Zhou, Z.; Li, B. GNSS multipath mitigation algorithm with antenna arrays based on matrix reconstruction. In Proceedings of the 2020 IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 28–30 October 2020; pp. 881–887. [Google Scholar]
- Veitsel, A.; Zhodzishsky, M.; Vorobiev, M.; Milyutin, D. Impact of Pseudorandom Noise Codes on Multipath Mitigation. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 2119–2123. [Google Scholar]
- Chen, X.; Dovis, F.; Peng, S.; Morton, Y. Comparative studies of GPS multipath mitigation methods performance. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1555–1568. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, X.; Liu, P. Statistical multipath model based on experimental GNSS data in static urban canyon environment. Sensors 2018, 18, 1149. [Google Scholar] [CrossRef]
- Groves, P.D.; Adjrad, M. Likelihood-based GNSS positioning using LOS/NLOS predictions from 3D mapping and pseudoranges. GPS Solut. 2017, 21, 1805–1816. [Google Scholar] [CrossRef]
- Axelrad, P.; Larson, K.; Jones, B. Use of the correct satellite repeat period to characterize and reduce site-specific multipath errors. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 2638–2648. [Google Scholar]
- Pugliano, G.; Robustelli, U.; Rossi, F.; Santamaria, R. A new method for specular and diffuse pseudorange multipath error extraction using wavelet analysis. GPS Solut. 2016, 20, 499–508. [Google Scholar] [CrossRef]
- Hsu, L.-T.; Gu, Y.; Huang, Y.; Kamijo, S. Urban pedestrian navigation using smartphone-based dead reckoning and 3-D map-aided GNSS. IEEE Sens. J. 2016, 16, 1281–1293. [Google Scholar] [CrossRef]
- Lan, H.; Yu, C.; El-Sheimy, N. An integrated PDR/GNSS pedestrian navigation system. In Proceedings of the China Satellite Navigation Conference (CSNC) 2015 Proceedings, Xi’an, China, 13–15 May 2015. [Google Scholar]
- Haiyu, L.; Chunyang, Y.; Yuan, Z.; You, L.; Naser, E.S. A novel kalman filter with state constraint approach for the integration of multiple pedestrian navigation systems. Micromachines 2015, 2015, 926–952. [Google Scholar]
- Basso, M.; Galanti, M.; Innocenti, G.; Miceli, D. Triggered INS/GNSS data fusion algorithms for enhanced pedestrian navigation system. IEEE Sens. J. 2020, 20, 7447–7459. [Google Scholar] [CrossRef]
- Basso, M.; Martinelli, A.; Morosi, S.; Sera, F. A real-time GNSS/PDR navigation system for mobile devices. Remote Sens. 2021, 13, 1567. [Google Scholar] [CrossRef]
- Godha, S.; Lachapelle, G.; Cannon, M.E. Integrated GPS/INS system for pedestrian navigation in a signal degraded environment. In Proceedings of the 19th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2006), Fort Worth, TX, USA, 26–29 September 2006; pp. 2151–2164. [Google Scholar]
- Jang, H.-J.; Kim, J.W.; Hwang, D.-H. Robust step detection method for pedestrian navigation systems. Electron. Lett. 2007, 43, 749–751. [Google Scholar] [CrossRef]
- Ying, H.; Silex, C.; Schnitzer, A.; Leonhardt, S.; Schiek, M. Automatic step detection in the accelerometer signal. In Proceedings of the 4th International Workshop on Wearable and Implantable Body Sensor Networks (BSN 2007), Aachen, Germany, 26–28 March 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 80–85. [Google Scholar]
- Levi, R.W.; Judd, T. Dead Reckoning Navigational System Using Accelerometer to Measure Foot Impacts. U.S. Patent 5,583,776, 10 December 1996. [Google Scholar]
- Qian, J.; Ma, J.; Ying, R.; Liu, P. RPNOS: Reliable pedestrian navigation on a smartphone. In Geo-Informatics in Resource Management and Sustainable Ecosystem; Springer: Berlin/Heidelberg, Germany, 2013; pp. 188–199. [Google Scholar]
- Wang, Q.; Luo, H.; Ye, L.; Men, A.; Zhao, F.; Huang, Y.; Ou, C. Personalized stride-length estimation based on active online learning. IEEE Internet Things J. 2020, 7, 4885–4897. [Google Scholar] [CrossRef]
- Xing, H.; Li, J.; Hou, B.; Zhang, Y.; Guo, M. Pedestrian stride length estimation from IMU measurements and ANN based algorithm. J. Sens. 2017, 2017, 6091261. [Google Scholar] [CrossRef]
- Shin, S.; Park, C.; Kim, J.; Hong, H.; Lee, J. Adaptive step length estimation algorithm using low-cost MEMS inertial sensors. In Proceedings of the 2007 IEEE Sensors Applications Symposium, San Diego, CA, USA, 6–8 February 2007; IEEE: New York, NY, USA, 2007; pp. 1–5. [Google Scholar]
- Poulose, A.; Senouci, B.; Han, D.S. Performance analysis of sensor fusion techniques for heading estimation using smartphone sensors. IEEE Sens. J. 2019, 19, 12369–12380. [Google Scholar] [CrossRef]
- Pei, L.; Liu, D.; Zou, D.; Choy, R.L.F.; Chen, Y.; He, Z. Optimal heading estimation based multidimensional particle filter for pedestrian indoor positioning. IEEE Access 2018, 6, 49705–49720. [Google Scholar] [CrossRef]
- Ali, A.; Siddharth, S.; El-Sheimy, N.; Syed, Z. An improved personal dead-reckoning algorithm for dynamically changing smartphone user modes. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2432–2439. [Google Scholar]
- Blanco-Delgado, N.; de Haag, M.U. Multipath analysis using code-minus-carrier for dynamic testing of GNSS receivers. In Proceedings of the 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 29–30 June 2011; pp. 25–30. [Google Scholar]
- Fan, Q.; Zhang, H.; Pan, P.; Zhuang, X.; Jia, J.; Zhang, P.; Zhao, Z.; Zhu, G.; Tang, Y. Improved pedestrian dead reckoning based on a robust adaptive Kalman filter for indoor inertial location system. Sensors 2019, 19, 294. [Google Scholar] [CrossRef]
- Tong, X.; Su, Y.; Li, Z.; Si, C.; Han, G.; Ning, J.; Yang, F. A double-step unscented Kalman filter and HMM-based zero-velocity update for pedestrian dead reckoning using MEMS sensors. IEEE Trans. Ind. Electron. 2019, 67, 581–591. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Index | Lap 1 | Lap 2 | Lap 3 |
|---|---|---|---|
| Detected steps | 311 | 309 | 316 |
| Detection success rate (%) | 99.1 | 98.4 | 99.4 |
| PDR stride length error (m) | −0.02 | 0.04 | 0.09 |
| PDR heading error (°) | −16.5 | −18.7 | −33.5 |
| GNSS heading error (°) | −2.9 | −0.9 | 2.2 |
| Methods | RMSE (m) | CEP50% (m) | CEP90% (m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Lap 1 | Lap 2 | Lap 3 | Lap 1 | Lap 2 | Lap 3 | Lap 1 | Lap 2 | Lap 3 | |
| Only PDR | 3.76 | 10.99 | 14.42 | 1.71 | 5.02 | 7.00 | 7.31 | 20.80 | 27.40 |
| Only RTD | 3.77 | 6.23 | 5.21 | 2.35 | 4.30 | 4.37 | 6.34 | 9.98 | 7.91 |
| MREKF | 2.37 | 3.02 | 4.81 | 1.57 | 3.99 | 3.94 | 3.69 | 6.33 | 9.19 |
| ESC | 2.70 | 7.15 | 8.21 | 1.34 | 3.10 | 6.88 | 4.73 | 13.13 | 13.28 |
| Ours | 1.63 | 3.19 | 4.71 | 1.12 | 2.29 | 2.67 | 3.27 | 5.83 | 7.19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Ying, R.; Dai, Z.; Wang, Y.; Qian, J.; Liu, P. Multi-Phase Fusion for Pedestrian Localization Using Mass-Market GNSS and MEMS Sensors. Sensors 2023, 23, 3624. https://doi.org/10.3390/s23073624
Liu Q, Ying R, Dai Z, Wang Y, Qian J, Liu P. Multi-Phase Fusion for Pedestrian Localization Using Mass-Market GNSS and MEMS Sensors. Sensors. 2023; 23(7):3624. https://doi.org/10.3390/s23073624
Chicago/Turabian StyleLiu, Qiang, Rendong Ying, Zhendong Dai, Yuze Wang, Jiuchao Qian, and Peilin Liu. 2023. "Multi-Phase Fusion for Pedestrian Localization Using Mass-Market GNSS and MEMS Sensors" Sensors 23, no. 7: 3624. https://doi.org/10.3390/s23073624
APA StyleLiu, Q., Ying, R., Dai, Z., Wang, Y., Qian, J., & Liu, P. (2023). Multi-Phase Fusion for Pedestrian Localization Using Mass-Market GNSS and MEMS Sensors. Sensors, 23(7), 3624. https://doi.org/10.3390/s23073624