


Trusted Autonomous Operations of Distributed Satellite Systems Using Optical Sensors †

 ,
,  ,
,  ,
,  ,
, 
 , ,
, ,
Abstract
1. Introduction
- (a)
- Distributed constellations may weigh less and cost less to launch.
- (b)
- Distributed satellites may perform better during deployment.
- (c)
- Distributed satellite constellations may be able to fail more gracefully.
- (d)
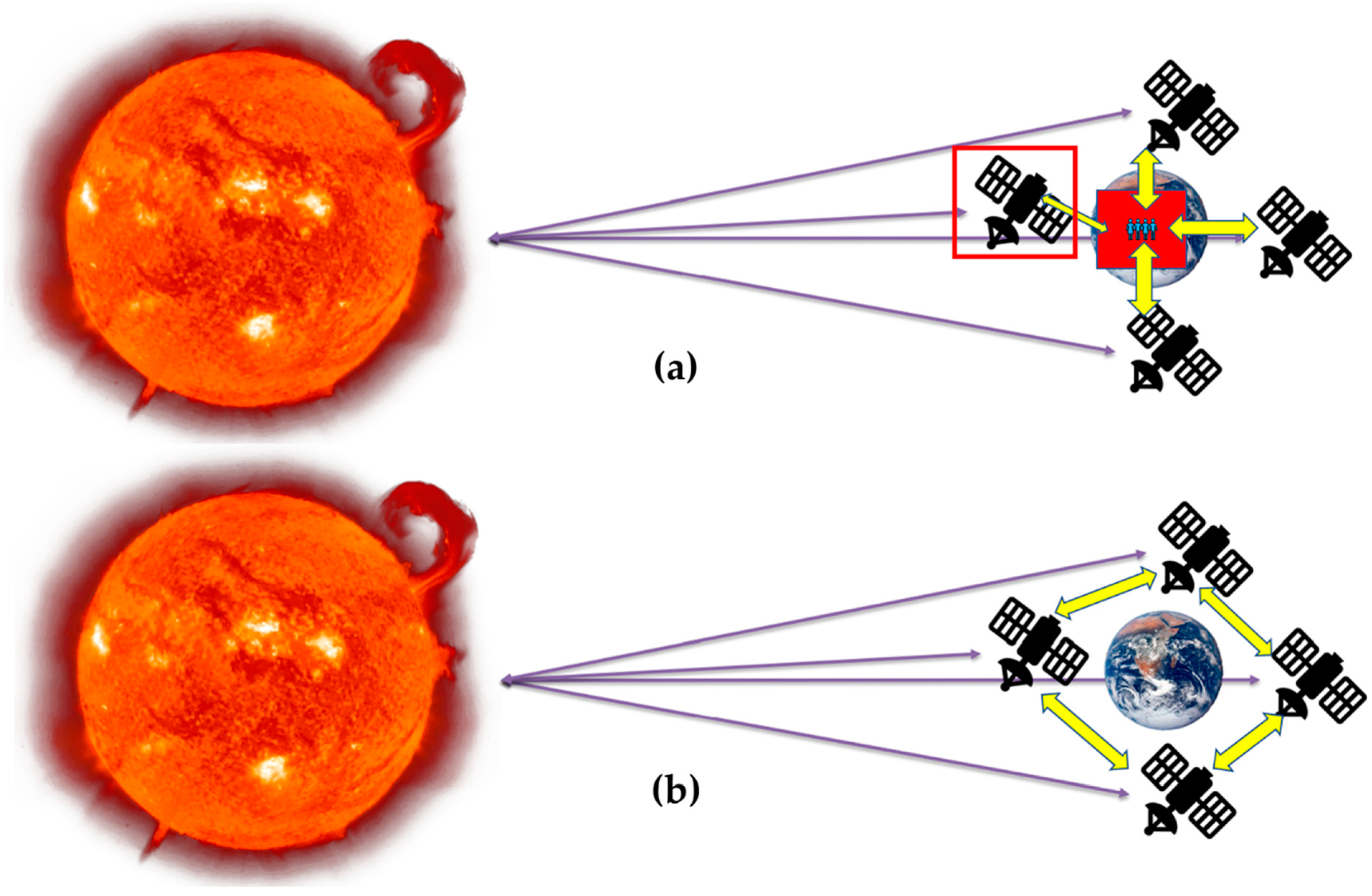
- Distributed satellite constellations may be more survivable in a cyber attack.
- Distributed Coordination: can share data and change what they prioritize.
- Autonomous Re-tasking: can respond to environmental stimuli autonomously, without requiring intervention from a ground operator.
- Increased Availability: when only a single spacecraft can be reached, it can relay commands to the others.
- Workload Balancing: can re-task satellites based on available computation, power, and communications resources.
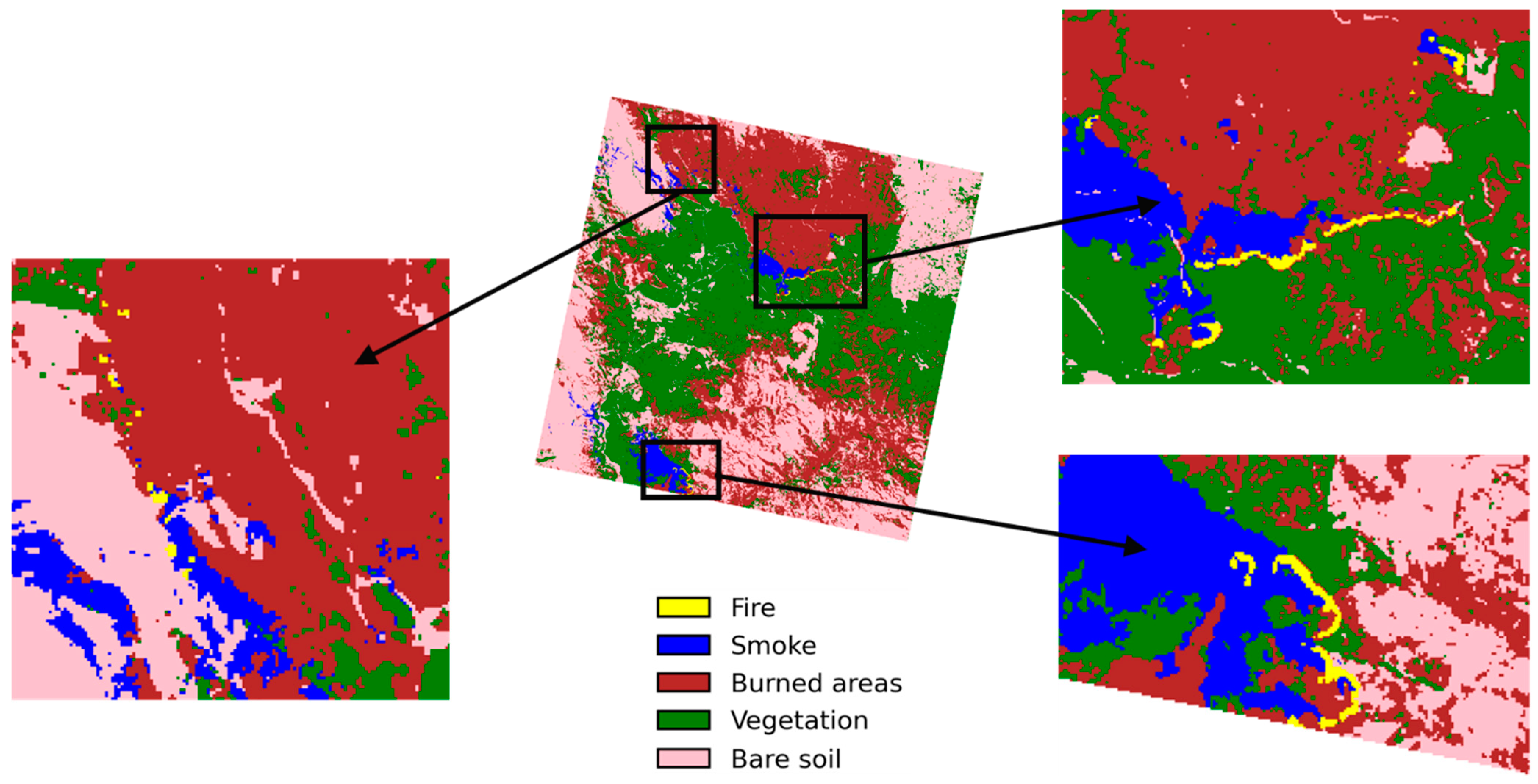
- Mission Astrionics: A reactive element, such as Artificial Intelligence (AI), is integrated with the DSS to achieve TASO for on-board data processing to provide real-time/near-real-time alerts. To accomplish the same, deep learning is developed and demonstrated for detecting wildfires on-board the satellite using optical payload, i.e., hyperspectral imagery.
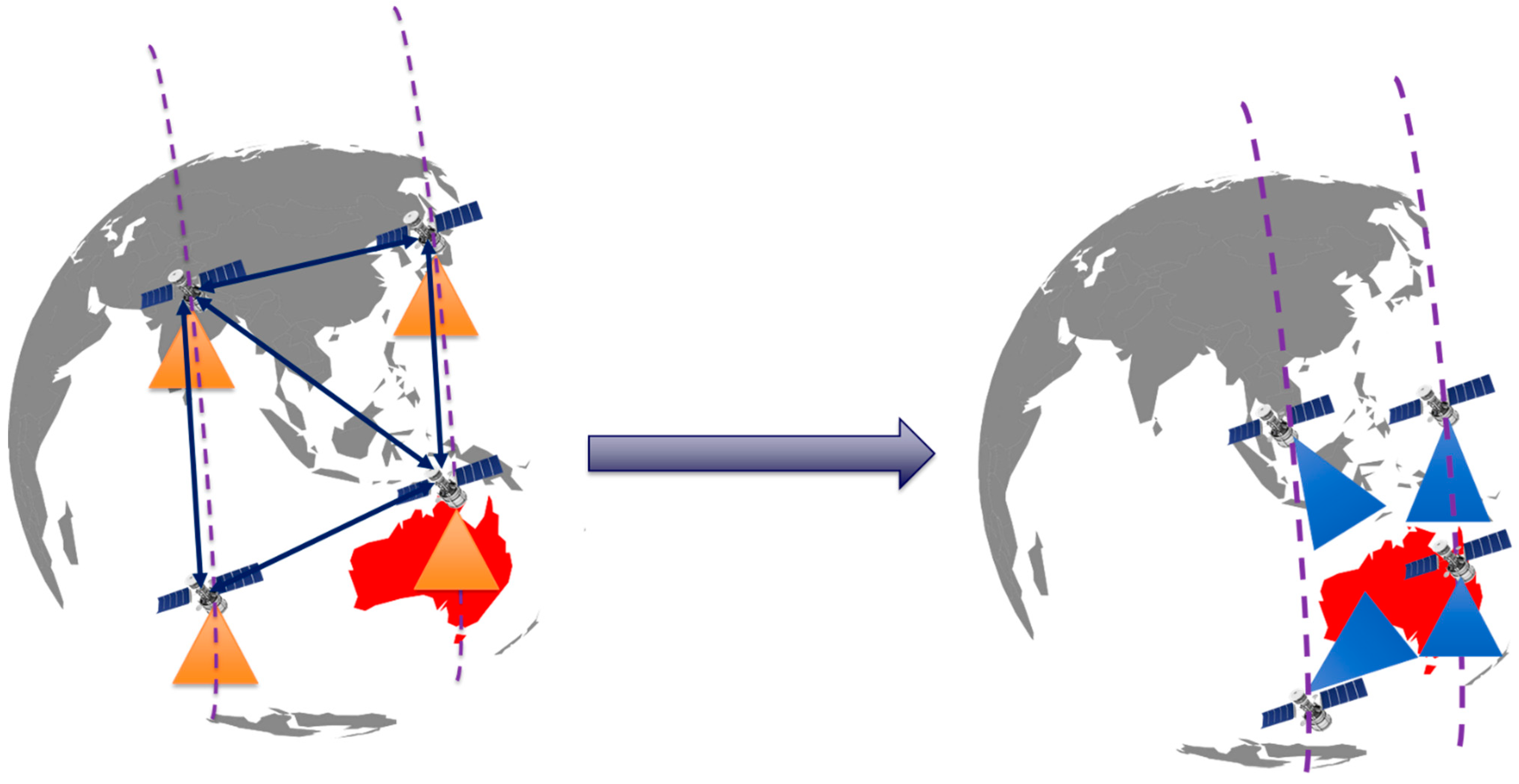
- Service Astrionics: For the TASO, the iDSS will reconfigure either based on the detection of a disaster event (wildfire) or based on the requirements of the owner/operator for the requested duration.
2. Distributed Satellite Systems
3. Reactive Features and Reconfiguration in iDSS
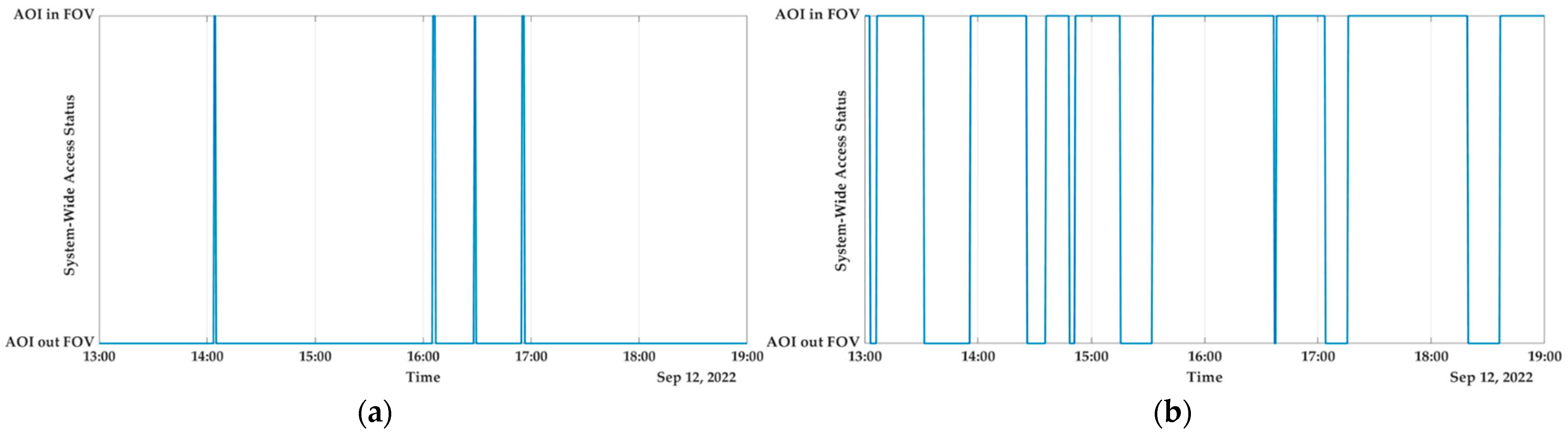
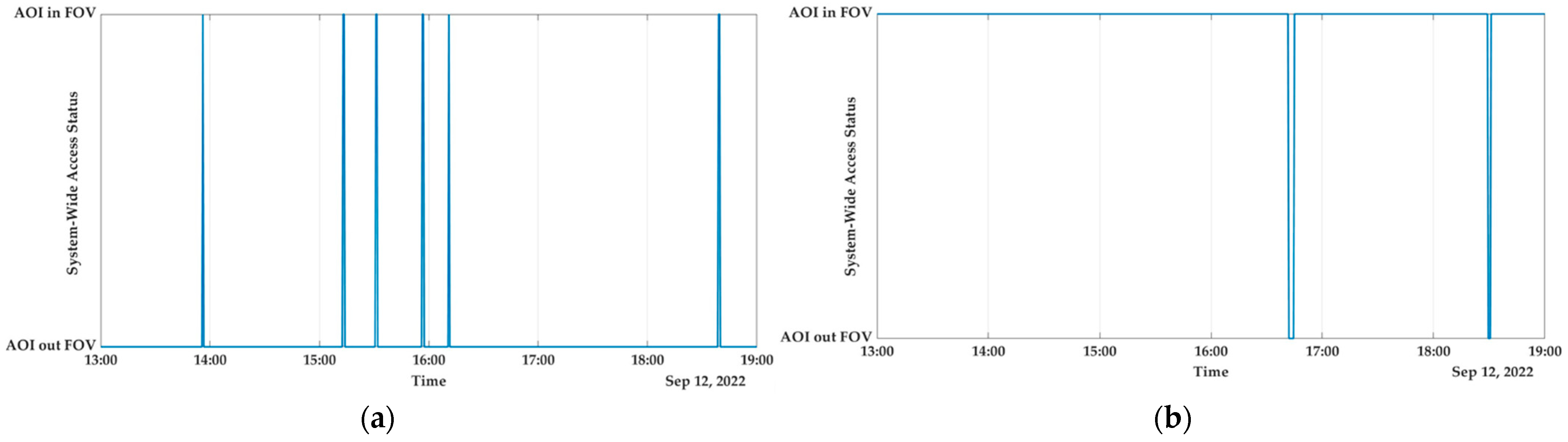
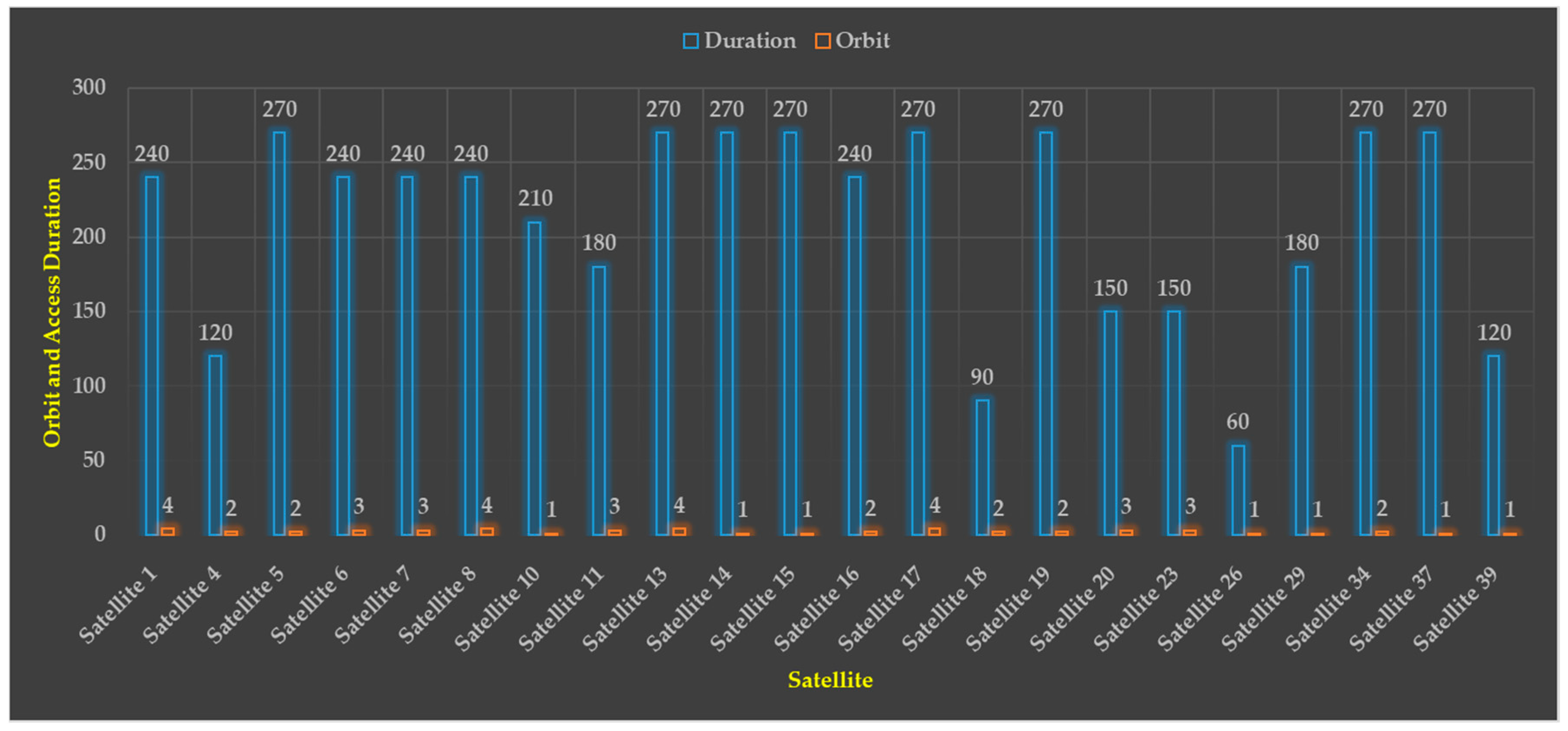
4. Results and Discussion
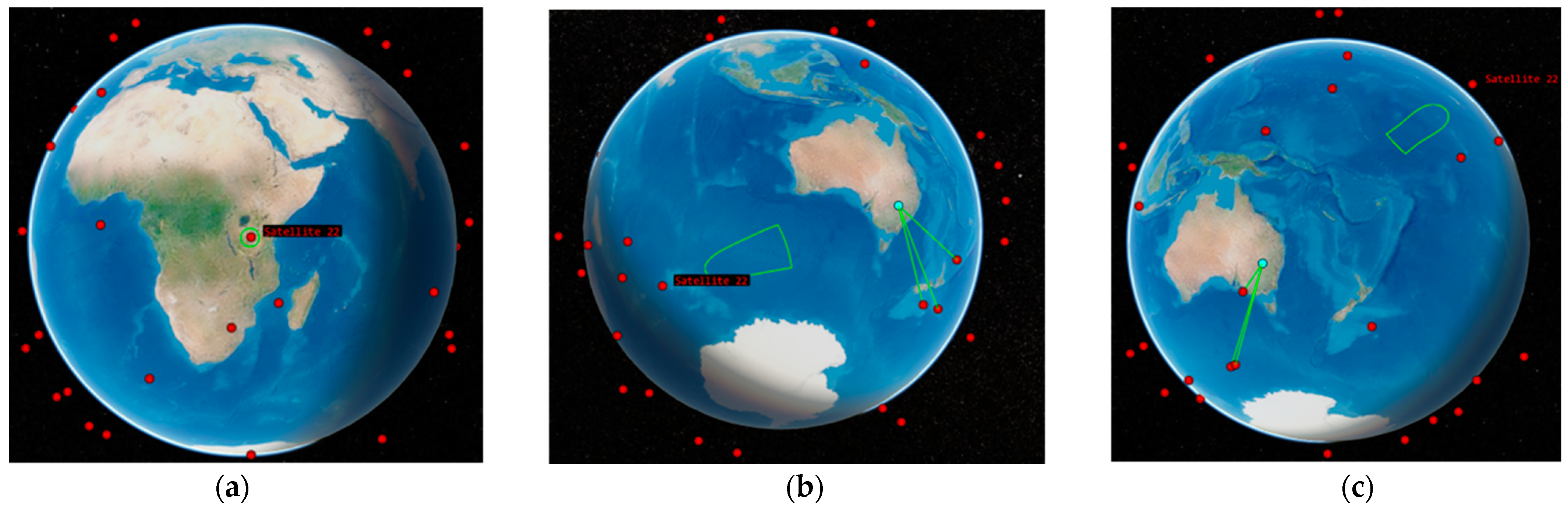
- Australia
- b.
- Africa
- c.
- Europe
- d.
- North America
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moigne, J.L.; Adams, J.C.; Nag, S. A New Taxonomy for Distributed Spacecraft Missions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 872–883. [Google Scholar] [CrossRef]
- Moigne, J.L.; Little, M.M.; Cole, M. New Observing Strategy (NOS) for Future Earth Science Missions. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5285–5288. [Google Scholar]
- Cramer, N.; Cellucci, D.; Adams, C.; Sweet, A.; Hejase, M.; Frank, J.; Levinson, R.; Gridnev, S.; Brown, L. Design and Testing of Autonomous Distributed Space Systems. In Proceedings of the Small Satellite Conference, 2021, online, 7–12 August 2021. [Google Scholar]
- Corbin, B.A. The Value Proposition of Distributed Satellite Systems for Space Science Missions. Ph.D. Thesis, Massachusetts Institute of Technology, Hongkong, China, 2015. [Google Scholar]
- Grasso, M.; Renga, A.; Fasano, G.; Graziano, M.D.; Grassi, M.; Moccia, A. Design of an end-to-end demonstration mission of a Formation-Flying Synthetic Aperture Radar (FF-SAR) based on microsatellites. Adv. Space Res. 2021, 67, 3909–3923. [Google Scholar] [CrossRef]
- Joffre, E.; Wealthy, D.; Fernandez, I.; Trenkel, C.; Voigt, P.; Ziegler, T.; Martens, W. LISA: Heliocentric formation design for the laser interferometer space antenna mission. Adv. Space Res. 2021, 67, 3868–3879. [Google Scholar] [CrossRef]
- Rajan, R.T.; Ben-Maor, S.; Kaderali, S.; Turner, C.; Milhim, M.; Melograna, C.; Haken, D.; Paul, G.; Vedant; Sreekumar, V.; et al. Applications and Potentials of Intelligent Swarms for magnetospheric studies. Acta Astronaut. 2022, 193, 554–571. [Google Scholar] [CrossRef]
- Plice, L.; Dono Perez, A.; West, S. Helioswarm: Swarm mission design in high altitude orbit for heliophysics. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019. [Google Scholar]
- Selva, D.; Golkar, A.; Korobova, O.; Cruz, I.; Collopy, P.; de Weck, O. Distributed Earth Satellite Systems: What Is Needed to Move Forward? J. Aerosp. Inf. Syst. 2017, 14, 412–438. [Google Scholar] [CrossRef]
- Thangavel, K.; Servidia, P.; Sabatini, R.; Marzocca, P.; Fayek, H.; Cerruti, S.H.; España, M.; Spiller, D. A Distributed Satellite System for Multibaseline AT-InSAR: Constellation of Formations for Maritime Domain Awareness Using Autonomous Orbit Control. Aerospace 2023, 10, 176. [Google Scholar] [CrossRef]
- Preston, R. Distributed Satellite Constellations Offer Advantages Over Monolithic Systems. Available online: https://www.rand.org/pubs/research_briefs/RB92.html (accessed on 24 August 2022).
- Angelita, C.; Kelly, E.J.M. The A-Train: NASA’s Earth Observing System (EOS) Satellites and other Earth Observation Satellites. In Proceedings of the 4th IAA Symposium on Small Satellites for Earth Observation, IAA-B4-1507P. Berlin, Germany, 6–10 May 2003. [Google Scholar]
- Sabatini, R. IEEE Distinguished Lecture: Aerospace Cyber-Physical and Autonomous Systems. 2020. Available online: https://www.researchgate.net/publication/341787434_Aerospace_Cyber-Physical_and_Autonomous_Systems (accessed on 18 October 2022).
- Utzmann, J.; Wagner, A.; Silha, J.; Schildknecht, T.; Willemsen, P.; Teston, F.; Flohrer, T. Space-Based Space Surveillance and Tracking Demonstrator: Mission and System Design; International Astronautical Federation (IAF): Paris, France, 2014. [Google Scholar]
- Ben-Larbi, M.K.; Flores Pozo, K.; Haylok, T.; Choi, M.; Grzesik, B.; Haas, A.; Krupke, D.; Konstanski, H.; Schaus, V.; Fekete, S.P.; et al. Towards the automated operations of large distributed satellite systems. Part 1: Review and paradigm shifts. Adv. Space Res. 2021, 67, 3598–3619. [Google Scholar] [CrossRef]
- Ben-Larbi, M.K.; Flores Pozo, K.; Choi, M.; Haylok, T.; Grzesik, B.; Haas, A.; Krupke, D.; Konstanski, H.; Schaus, V.; Fekete, S.P.; et al. Towards the automated operations of large distributed satellite systems. Part 2: Classifications and tools. Adv. Space Res. 2021, 67, 3620–3637. [Google Scholar] [CrossRef]
- Hussain, K.; Thangavel, K.; Alessandro, G.; Roberto, S. Autonomous Optical Sensing for Space-Based Space Surveillance. In Proceedings of the 44th IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2023. [Google Scholar]
- Hussain, K.; Thangavel, K.; Gardi, A.; Sabatini, R. Autonomous tracking of Resident Space Objects using multiple ground-based Electro-Optical sensors. In Proceedings of the 17th International Conference on Space Operations, Dubai, United Arab Emirates, 6–10 March 2023. [Google Scholar]
- Loizzo, R.; Guarini, R.; Longo, F.; Scopa, T.; Formaro, R.; Facchinetti, C.; Varacalli, G. PRISMA: The Italian hyperspectral mission. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 175–178. [Google Scholar]
- Pignatti, S.; Palombo, A.; Pascucci, S.; Romano, F.; Santini, F.; Simoniello, T.; Umberto, A.; Vincenzo, C.; Acito, N.; Diani, M. The PRISMA hyperspectral mission: Science activities and opportunities for agriculture and land monitoring. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 4558–4561. [Google Scholar]
- Tapley, B.; Bettadpur, S.; Ries, J.C.; Thompson, P.; Watkins, M. GRACE Measurements of Mass Variability in the Earth System. Science 2004, 305, 503–505. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A satellite formation for high-resolution SAR interferometry. Geosci. Remote Sens. IEEE Trans. 2007, 45, 3317–3341. [Google Scholar] [CrossRef]
- Araguz, C.; Bou-Balust, E.; Alarcón, E. Applying autonomy to distributed satellite systems: Trends, challenges, and future prospects. Syst. Eng. 2018, 21, 401–416. [Google Scholar] [CrossRef]
- Poghosyan, A.; Lluch, I.; Matevosyan, H.; Lamb, A.; Moreno, C.; Taylor, C.; Golkar, A.; Cote, J.; Mathieu, S.; Pierotti, S.; et al. Unified Classification for Distributed Satellite Systems. In Proceedings of the 4th International Federated and Fractionated Satellite Systems Workshop, Rome, Italy, 10–11 October 2016. [Google Scholar]
- Hilton, S.; Gardi, A.; Sabatini, R.; Ezer, N.; Desai, S. Human-Machine System Design for Autonomous Distributed Satellite Operations. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Rosso, M.P.D.; Sebastianelli, A.; Spiller, D.; Ullo, S.L. A demo setup testing onboard CNNs for Volcanic Eruption Detection. In Proceedings of the 2022 IEEE International Conference on Metrology for Extended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), Rome, Italy, 26–28 October 2022; pp. 719–724. [Google Scholar] [CrossRef]
- Spiller, D.; Thangavel, K.; Sasidharan, S.T.; Amici, S.; Ansalone, L.; Sabatini, R. Wildfire segmentation analysis from edge computing for on-board real-time alerts using hyperspectral imagery. In Proceedings of the 2022 IEEE International Conference on Metrology for Extended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), Milano, Italy, 26–28 October 2022; pp. 725–730. [Google Scholar]
- Ranasinghe, K.; Sabatini, R.; Gardi, A.; Bijjahalli, S.; Kapoor, R.; Fahey, T.; Thangavel, K. Advances in Integrated System Health Management for mission-essential and safety-critical aerospace applications. Prog. Aerosp. Sci. 2022, 128, 100758. [Google Scholar] [CrossRef]
- Thangavel, K.; Spiller, D.; Sabatini, R.; Servidia, P.; Marzocca, P.; Fayek, H.; Hussain, K.; Gardi, A. Trusted Autonomous Distributed Satellite System Operations for Earth Observation. In Proceedings of the 17th International Conference on Space Operations, Dubai, United Arab Emirates, 6–10 March 2023. [Google Scholar]
- Miralles, P.; Thangavel, K.; Scannapieco, A.; Jagadam, N.; Baranwal, P.; Faldu, B.; Abhang, R.; Bhatia, S.; Bonnart, S.; Bhatnagar, I.; et al. A critical review on the state-of-the-art and future prospects of Machine Learning for Earth Observation Operations. Adv. Space Res. 2023. Available online: https://www.sciencedirect.com/science/article/abs/pii/S027311772300145X?via%3Dihub (accessed on 21 February 2023). [CrossRef]
- Martínez, L.; Merlano Duncan, J.C.; Querol, J.; Kumar, S.; Krivochiza, J.; Sharma, S.K.; Chatzinotas, S.; Camps, A.; Otterstern, B. Architectures and Synchronization Techniques for Distributed Satellite Systems: A Survey. IEEE Access 2022, 10, 45375–45409. [Google Scholar]
- Chan, V.W. Optical satellite networks. J. Light. Technol. 2003, 21, 2811. [Google Scholar] [CrossRef]
- Hemmati, H.; Caplan, D. Optical satellite communications. Opt. Fiber Telecommun. 2013, 121–162. Available online: https://www.sciencedirect.com/science/article/pii/B9780123969606000043 (accessed on 21 February 2023). [CrossRef]
- Chaudhry, A.; Yanikomeroglu, H. Free Space Optics for Next-Generation Satellite Networks. IEEE Consum. Electron. Mag. 2020, 10, 21–31. [Google Scholar] [CrossRef]
- Thangavel, K.; Spiller, D.; Sabatini, R.; Marzocca, P.; Esposito, M. Near Real-time Wildfire Management Using Distributed Satellite System. IEEE Geosci. Remote Sens. Lett. 2022, 20, 5500705. [Google Scholar] [CrossRef]
- Toyoshima, M.; Leeb, W.; Kunimori, H.; Takano, T. Optical Communications Work Best over Relatively Short Distances in Space. Available online: https://www.spie.org/news/0088-optical-communications-work-best-over-relatively-short-distances-in-space?SSO=1 (accessed on 2 December 2022).
- Heydari, B.; Mosleh, M.; Dalili, K. From Modular to Distributed Open Architectures: A Unified Decision Framework. Syst. Eng. 2016, 19, 252–266. [Google Scholar] [CrossRef]
- Guo, J.; Maessen, D.; Gill, E. Fractionated spacecraft: The new sprout in distributed space systems. In Proceedings of the 60th International Astronautical Congress, Daejeon, Republic of Korea, 12–16 October 2009. [Google Scholar]
- Brown, O.; Eremenko, P. Fractionated Space Architectures: A Vision for Responsive Space; Defense Advanced Research Projects Agency: Arlington, VA, USA, 2006; p. 15. [Google Scholar]
- Schwarz, B.S. Fractionated satellites: A systems engineering analysis. Ph.D. Thesis, University of Southampton, Hampshire, UK, 2014. [Google Scholar]
- Yaglioglu, B.; Wang, J. Cluster Flying Configuration Evaluation in the Case of Fractionated Spacecraft Architecture. 2010. Available online: https://www.researchgate.net/publication/309512577_Cluster_Flying_Configuration_Evaluation_in_the_Case_of_Fractionated_Spacecraft_Architecture (accessed on 21 February 2023).
- Brown, O.; Eremenko, P. The value proposition for fractionated space architectures. In Session: SE-4: Satellite Economics, Space 2006; p. 7506. [CrossRef]
- Qiao, L.; Rizos, C.; Dempster, A. Design and Analysis of Satellite Orbits for the Garada Mission. In Proceedings of the 12th Australian Space Science Conference (ASSC 2012), Melbourne, Australia, 24–26 September 2011. [Google Scholar]
- Kallis, G. Droughts. Annu. Rev. Environ. Resour. 2008, 33, 85–118. [Google Scholar] [CrossRef]
- Han, J.; Dai, H.; Gu, Z. Sandstorms and desertification in Mongolia, an example of future climate events: A review. Environ. Chem. Lett. 2021, 19, 4063–4073. [Google Scholar] [CrossRef]
- Lindsey, R. Climate Change: Global Sea Level. Available online: http://arizonaenergy.org/News_17/News_Sep17/ClimateChangeGlobalSeaLevel.html (accessed on 24 December 2022).
- Lee, C.C. Utilizing synoptic climatological methods to assess the impacts of climate change on future tornado-favorable environments. Nat. Hazards 2012, 62, 325–343. [Google Scholar] [CrossRef]
- Robock, A. Volcanic eruptions and climate. Rev. Geophys. 2000, 38, 191–219. [Google Scholar] [CrossRef]
- Xu, R.; Yu, P.; Abramson, M.J.; Johnston, F.H.; Samet, J.M.; Bell, M.L.; Haines, A.; Ebi, K.L.; Li, S.; Guo, Y. Wildfires, global climate change, and human health. N. Engl. J. Med. 2020, 383, 2173–2181. [Google Scholar] [CrossRef] [PubMed]
- Thangavel, K.; Spiller, D.; Sabatini, R.; Amici, S.; Sasidharan, S.T.; Fayek, H.; Marzocca, P. Autonomous Satellite Wildfire Detection Using Hyperspectral Imagery and Neural Networks: A Case Study on Australian Wildfire. Remote Sens. 2023, 15, 720. [Google Scholar] [CrossRef]
- Larson, W.J.; Wertz, J.R. Space Mission Analysis and Design; Microcosm, Inc.: Torrance, CA, USA, 1992. [Google Scholar]
- Esposito, M.; Carnicero Domíguez, B.; Pastena, M.; Vercruyssen, N.; Conticello, S.; Dijk, C.; Manzillo, P.; Koeleman, R. Highly Integration of Hyperspectral, Thermal And Artificial Intelligence for The ESA Phisat-1 Mission. In Proceedings of the International Astronautical Congress IAC, Washington, DC, USA, 21–25 October 2019. [Google Scholar]
- Pastena, M. Φsat-1: The first ESA Earth Observation Directorate cubesat mission. In Proceedings of the 4th Cubesat Industry Days, Noordwijk, The Netherlands, 4–6 June 2019. [Google Scholar]
- Pastena, M. ESA Earth Observation on Board Data Processing Future Needs and Technologies. In Proceedings of the European Workshop on On-Board Data Processing (OBDP2019); Available online: https://indico.esa.int/event/225/contributions/3687/attachments/3357/4395/OBDP2019-S01-03-ESA_Pastena_ESA_Earth_Observation_On_board_data_processing_future_needs_and_technologies.pdf (accessed on 20 December 2022).
- Giuffrida, G.; Diana, L.; de Gioia, F.; Benelli, G.; Meoni, G.; Donati, M.; Fanucci, L. CloudScout: A Deep Neural Network for On-Board Cloud Detection on Hyperspectral Images. Remote Sens. 2020, 12, 2205. [Google Scholar] [CrossRef]
- Spiller, D.; Ansalone, L.; Amici, S.; Piscini, A.; Mathieu, P. Analysis and Detection of Wildfires by Using Prisma Hyperspectral Imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B3-2021, 215–222. [Google Scholar] [CrossRef]
- Thangavel, K.; Spiller, D.; Sabatini, R.; Marzocca, P. On-board Data Processing of Earth Observation Data Using 1-D CNN. In Proceedings of the SmartSat CRC Conference 2022, Sydney, Australia, 12–13 September 2022. [Google Scholar]
- Spiller, S.A.D.; Ansalone, L. Transfer learning analysis for wildfire segmenta-tion using PRISMA hyperspectral imagery and convolutional neural networks. In Proceedings of the IEEE WHISPERS, Rome, Italy, 13–16 September 2022. [Google Scholar]
- Del Rosso, M.P.; Sebastianelli, A.; Spiller, D.; Mathieu, P.P.; Ullo, S.L. On-Board Volcanic Eruption Detection through CNNs and Satellite Multispectral Imagery. Remote Sens. 2021, 13, 3479. [Google Scholar] [CrossRef]
- Mateo-García, G.; Veitch-Michaelis, J.; Purcell, C.; Longepe, N.; Mathieu, P.P.; Reid, S.; Anlind, A.; Bruhn, F.; Parr, J. In-orbit demonstration of a re-trainable Machine Learning Payload for processing optical imagery. 2022; Preprint from Research Square. [Google Scholar]
- Giardino, C.; Bresciani, M.; Braga, F.; Fabbretto, A.; Ghirardi, N.; Pepe, M.; Gianinetto, M.; Colombo, R.; Cogliati, S.; Ghebrehiwot, S.; et al. First Evaluation of PRISMA Level 1 Data for Water Applications. Sensors 2020, 20, 4553. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Zhang, S.; Wu, J. Detecting, Extracting, and Monitoring Surface Water From Space Using Optical Sensors: A Review. Rev. Geophys. 2018, 56, 333–360. [Google Scholar] [CrossRef]
- Thangavel, K.; Servidia, P.; Sabatini, R.; Marzocca, P.; Fayek, H.; Spiller, D. Distributed Satellite System for Maritime Domain Awareness. In Proceedings of the Australian International Aerospace Congress (AIAC20), Melbourne, Australia, 27–28 February 2023. [Google Scholar]
- Shikwambana, L.; Kganyago, M.; Xulu, S. Analysis of wildfires and associated emissions during the recent strong ENSO phases in Southern Africa using multi-source remotely-derived products. Geocarto Int. 2022, 37, 16654–16670. [Google Scholar] [CrossRef]
- Salis, M.; Ager, A.A.; Arca, B.; Finney, M.A.; Bacciu, V.; Duce, P.; Spano, D. Assessing exposure of human and ecological values to wildfire in Sardinia, Italy. Int. J. Wildland Fire 2013, 22, 549–565. [Google Scholar] [CrossRef]
- Ager, A.A.; Preisler, H.K.; Arca, B.; Spano, D.; Salis, M. Wildfire risk estimation in the Mediterranean area. Environmetrics 2014, 25, 384–396. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DSS Architecture Type | Mission Goals | Cooperation | Homogeneity | Operational/Functional Independence | |
|---|---|---|---|---|---|
| Constellation | Mission goals shared (Iridium, GPS) | Cooperation is required to support the mission goals | In general, homogeneous components, some differences possible(GPS generations) | Autonomous | |
| Formation | Trains | Mostly independent, but could be shared | Cooperation from optional to required | Heterogeneous components | Autonomous |
| Cluster | Mission goals shared | Cooperation is required to support mission goals | Homogeneous components | From autonomous to completely co-dependent | |
| Leader/follower | Mission goals shared | Cooperation from optional to required | Heterogeneous components | From autonomous to completely co-dependent | |
| Swarms | Mission goals shared | Cooperation required tosupport mission goals | From homogeneous to heterogeneous components | From autonomous to completely co-dependent | |
| Fractionated | Shared mission goals | From optional (service areas) to required (distributed critical spacecraft functions) | Heterogeneous components | From autonomous to completely co-dependent | |
| Federated | Independent mission goals | Ad hoc, optional | Heterogeneous components | Autonomous | |
| Modular | Mission goals shared | Cooperation is required to support mission goals | From homogeneous to heterogeneous components | From autonomous to completely co-dependent | |
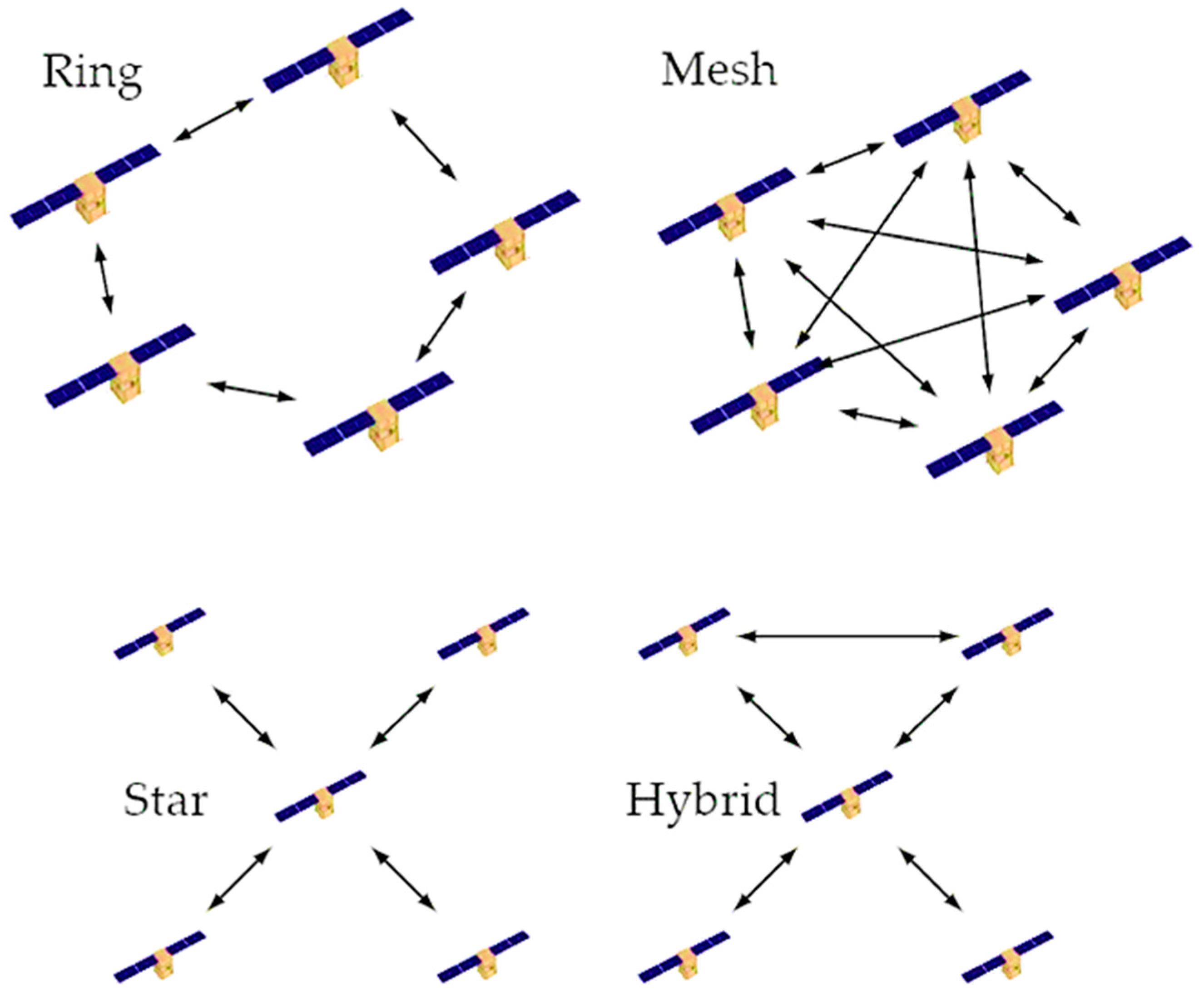
| Hybrid | Mostly independent, but could be shared | Ad hoc, optional | Heterogeneous components | From autonomous to completely co-dependent | |
| Constellation of formations | Mostly shared but could be independent | Cooperation is required to support mission goals | From homogeneous to heterogeneous components | From autonomous to completely co-dependent | |
| Satellite/Sensors | Number of Bands | Spatial Resolution (m) | Temporal Resolution (Day) | Swath (km) | Scale of Application | Data Availability |
|---|---|---|---|---|---|---|
| NOAA/AVHRR | 5 | 1100 | 0.5 | 2800 | R–G | 1978 |
| MODIS | 36 | 250–1000 | 0.5 | 2330 | R–G | 1999 |
| Suomi NPP-VIIRS | 22 | 375–750 | 0.5 | 3040 | R–G | 2012 |
| MERIS | 15 | 300 | 3 | 1150 | R–G | 2002–2012 |
| Sentinel-3 OLCI | 21 | 300 | 2 | 1270 | R–G | 2016 |
| Landsat | 4–9 | 15–80 | 16 | 185 | L–G | 1972 |
| SPOT | 4–5 | 2.5–20 | 26 | 120 | L–R | 1986 |
| Aster | 14 | 15–90 | 16 | 60 | L–G | 1999 |
| Sentinel-2 MSI | 13 | 10–60 | 5 | 290 | L–R | 2015 |
| IKONOS | 5 | 1–4 | 1.5–3 | 11.3 | L–R | 1999 |
| QuickBird | 5 | 0.61–2.24 | 2.7 | 16.5 | L | 2001 |
| WorldView | 4–17 | 0.31–2.40 | 1–4 | 17.6 | L | 2007 |
| RapidEye | 5 | 5 | 1–5.5 | 77 | L–R | 2008 |
| ZY-3 | 4 | 2.1–5.8 | 5 | 50 | L–R | 2012 |
| GF-1/GF-2 | 5 | 1–16 | 4–5 | 800 | L–R | 2013 |
| PRISMA | 238 | 5–30 | 29 * | 30 | L–G | 2019 |
| Hyperscout-2 | 48 | 75–85 | 4-7 | ~300 | L–G | 2020 |
| HW Accelerator | Inference Time (ms) | Power Consumption (W) |
|---|---|---|
| Movidius | 5.8 | 1.4 |
| Jetson TX2 | 3.0 | 4.8 (2.1 GPU only) |
| Jetson Nano | 3.4 | 2.6 (2.0 GPU only) |
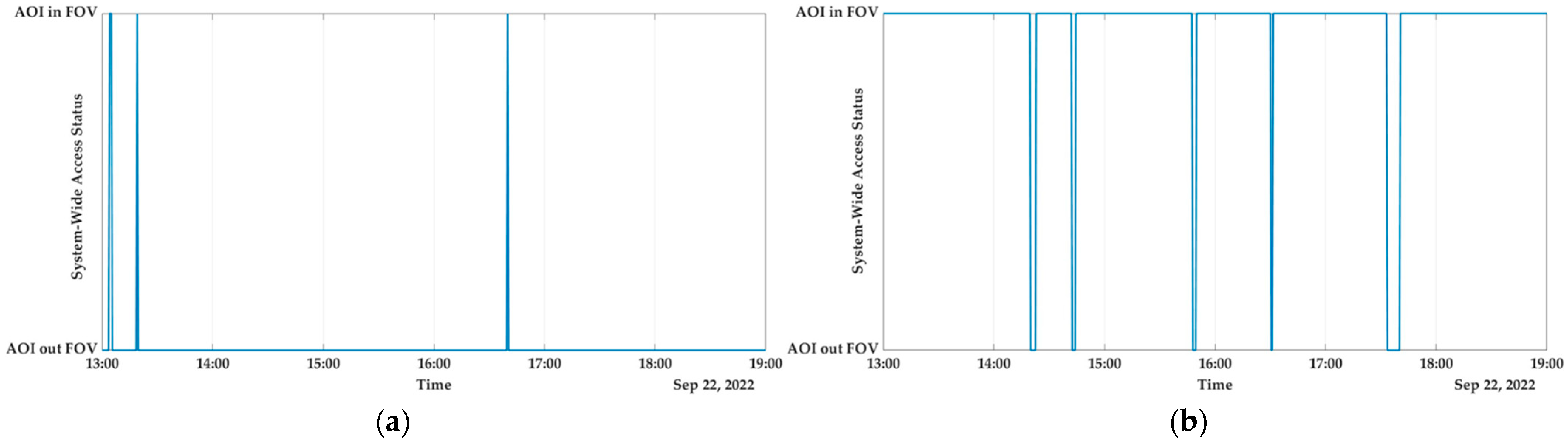
| Location | Latitude (deg) | Longitude (deg) | n | SWAD (sec) | SWAP (%) | N | ||
|---|---|---|---|---|---|---|---|---|
| Africa | 11.2027 | 17.8739 | 10 | 300 | 1.3889 | 545 | 16,350 | 75.6944 |
| Australia | −31.25 | 146.92 | 5 | 150 | 0.6944 | 691 | 20,730 | 95.9722 |
| Europe | 40.1209 | 9.0129 | 10 | 300 | 1.3889 | 712 | 21,360 | 98.8889 |
| North America | 44 | −120.3 | 14 | 420 | 1.9444 | 699 | 20,970 | 97.0833 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thangavel, K.; Spiller, D.; Sabatini, R.; Amici, S.; Longepe, N.; Servidia, P.; Marzocca, P.; Fayek, H.; Ansalone, L. Trusted Autonomous Operations of Distributed Satellite Systems Using Optical Sensors. Sensors 2023, 23, 3344. https://doi.org/10.3390/s23063344
Thangavel K, Spiller D, Sabatini R, Amici S, Longepe N, Servidia P, Marzocca P, Fayek H, Ansalone L. Trusted Autonomous Operations of Distributed Satellite Systems Using Optical Sensors. Sensors. 2023; 23(6):3344. https://doi.org/10.3390/s23063344
Chicago/Turabian StyleThangavel, Kathiravan, Dario Spiller, Roberto Sabatini, Stefania Amici, Nicolas Longepe, Pablo Servidia, Pier Marzocca, Haytham Fayek, and Luigi Ansalone. 2023. "Trusted Autonomous Operations of Distributed Satellite Systems Using Optical Sensors" Sensors 23, no. 6: 3344. https://doi.org/10.3390/s23063344
APA StyleThangavel, K., Spiller, D., Sabatini, R., Amici, S., Longepe, N., Servidia, P., Marzocca, P., Fayek, H., & Ansalone, L. (2023). Trusted Autonomous Operations of Distributed Satellite Systems Using Optical Sensors. Sensors, 23(6), 3344. https://doi.org/10.3390/s23063344