
Proposals for Surmounting Sensor Noises



Abstract
1. Introduction
1.1. Introduction to the Problem
1.2. Review of the State-of-the-Art Alternatives to Address the Problem
1.3. Novelties Presented
- Open-loop optimal results are analytically calculated providing a performance benchmark for comparing other methods.
- Inspired by Opromolla, 2015 [11], velocity-based classical control is investigated, especially since it was utilized as the comparative benchmark by Sandberg (2022) [17], Raigoza (2022) [23], and Wilt (2022) [24], while the open-loop optimal results in item #1 are used as comparative benchmark here.
- Real-time optimal control is compared since it was the latest cited proposals of 2022, and can be considered state of the art for this application, as an analytic optimal solution is found, which is not always possible for a generic system.
- Double-integrator patching filters are implemented seeking to match open-loop optimal results amidst the fusion of noisy sensors.
- System-inverting patching filters are implemented, also seeking to match open-loop optimal results amidst the fusion of noisy sensors.
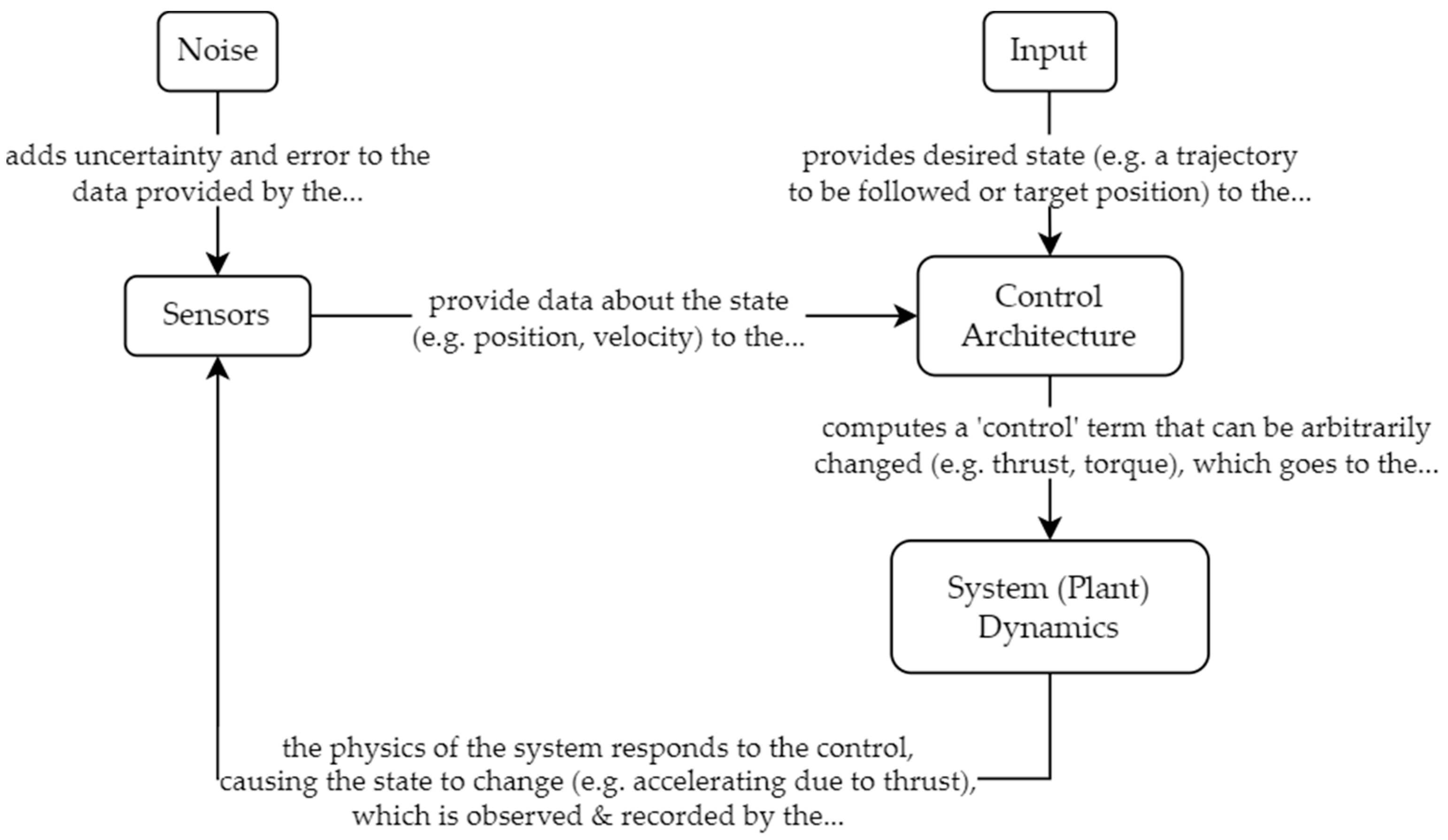
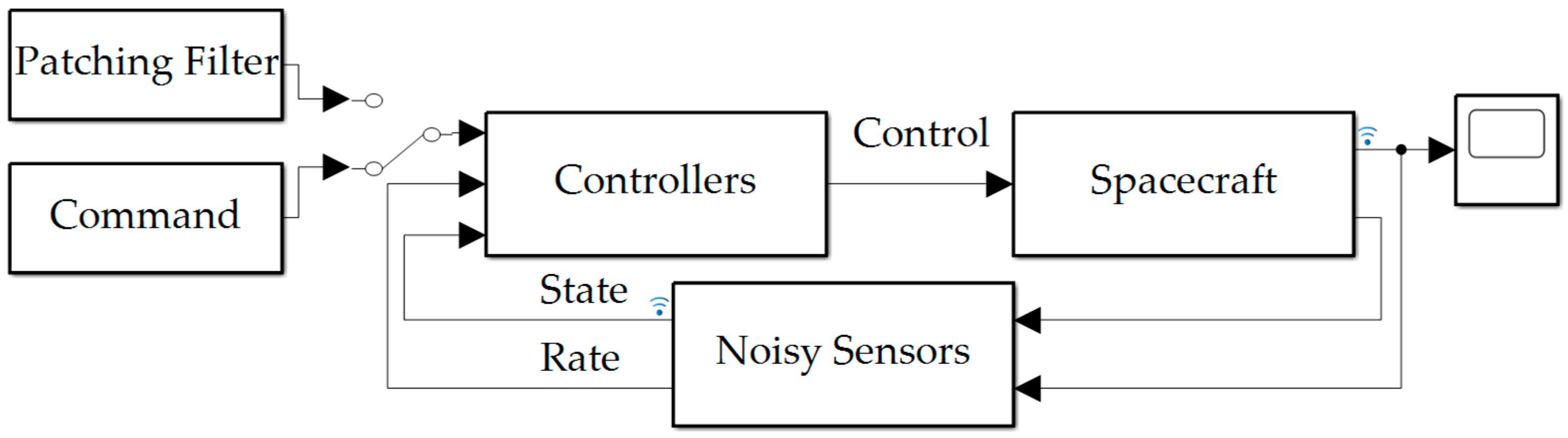
1.4. Feedback Control System Topology
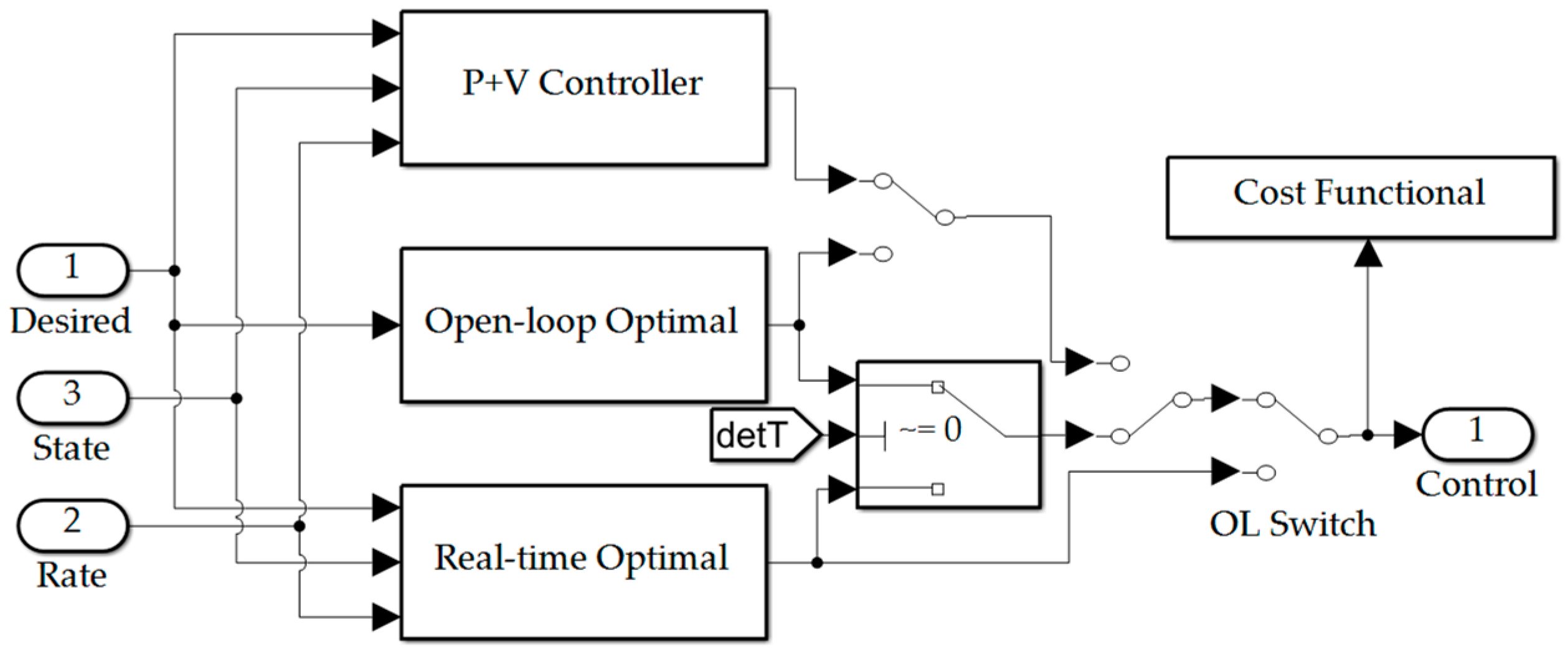
2. Control System Architectures
2.1. The Task at Hand
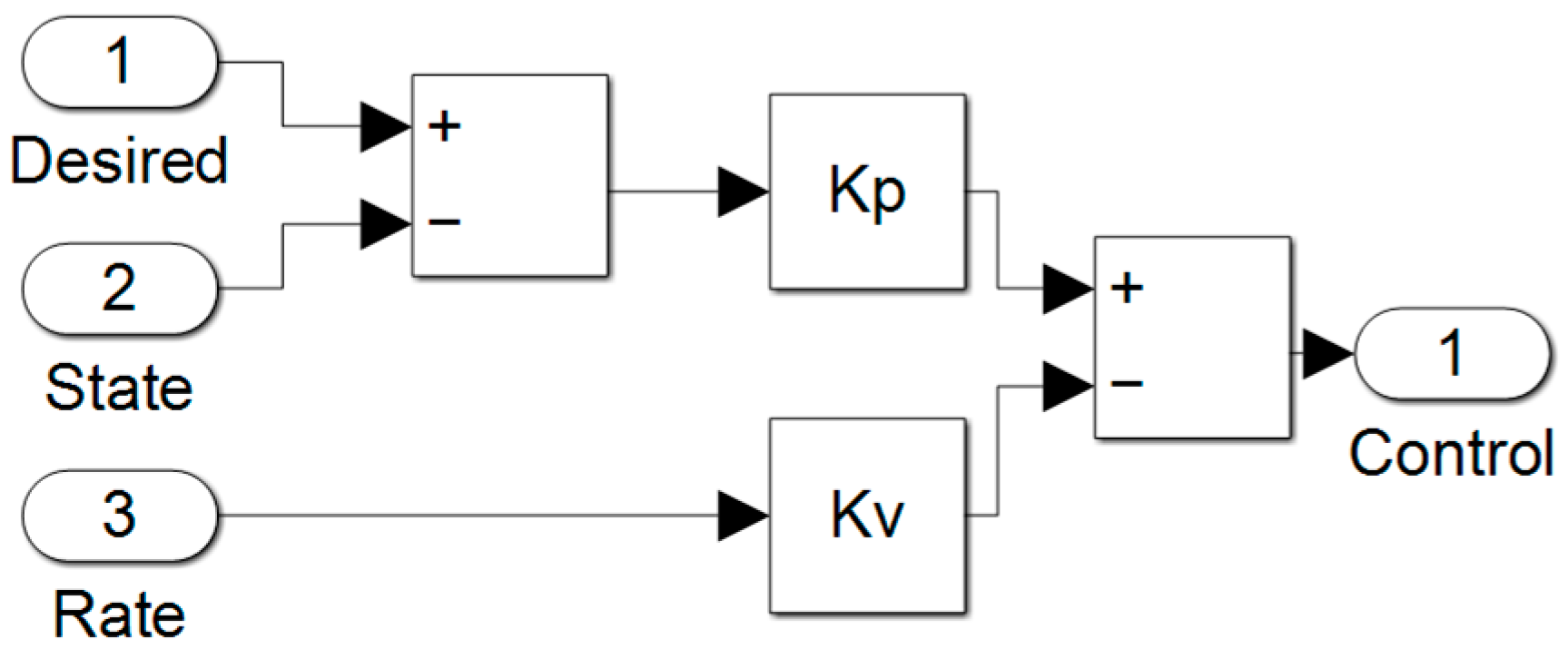
2.2. Proportional Plus Velocity (P+V) Control
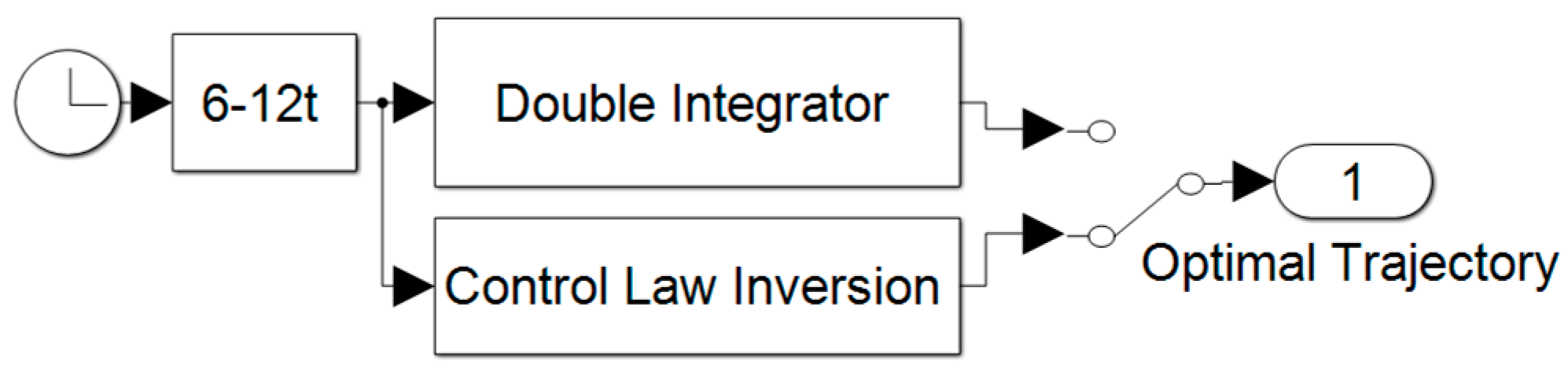
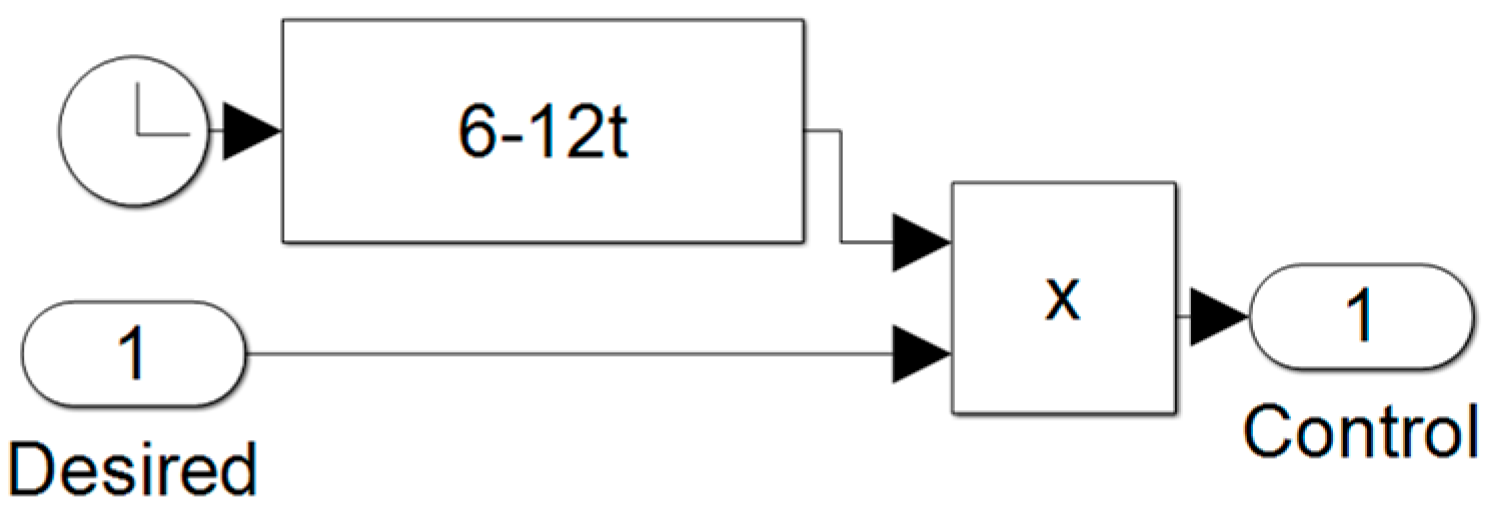
2.3. Open-Loop Optimal Control
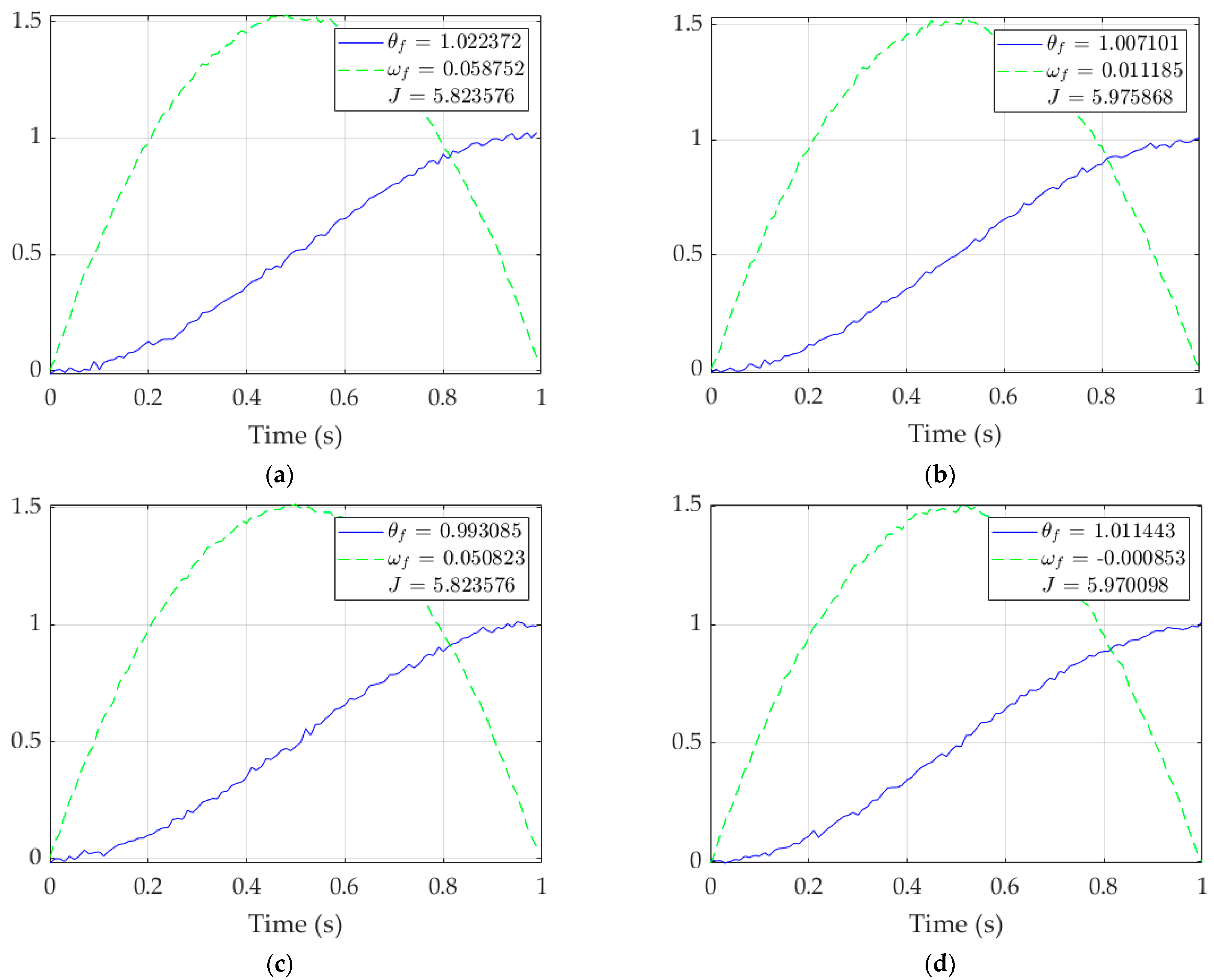
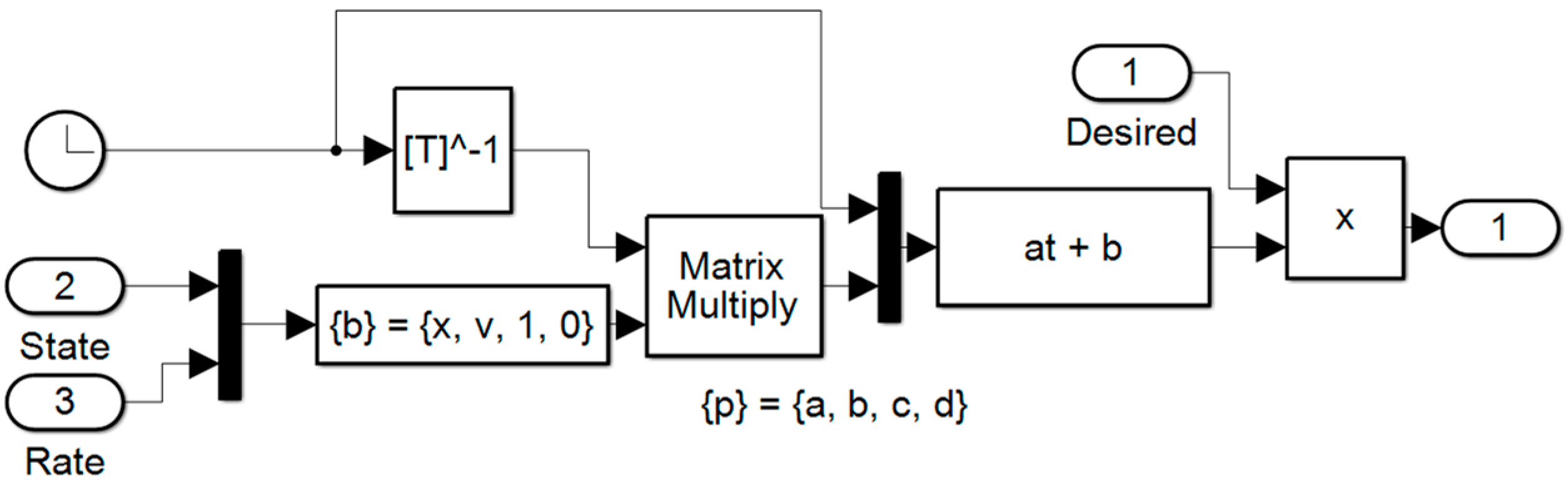
2.4. Real-Time Optimal Control
2.5. Patching Filter: Double Integrator
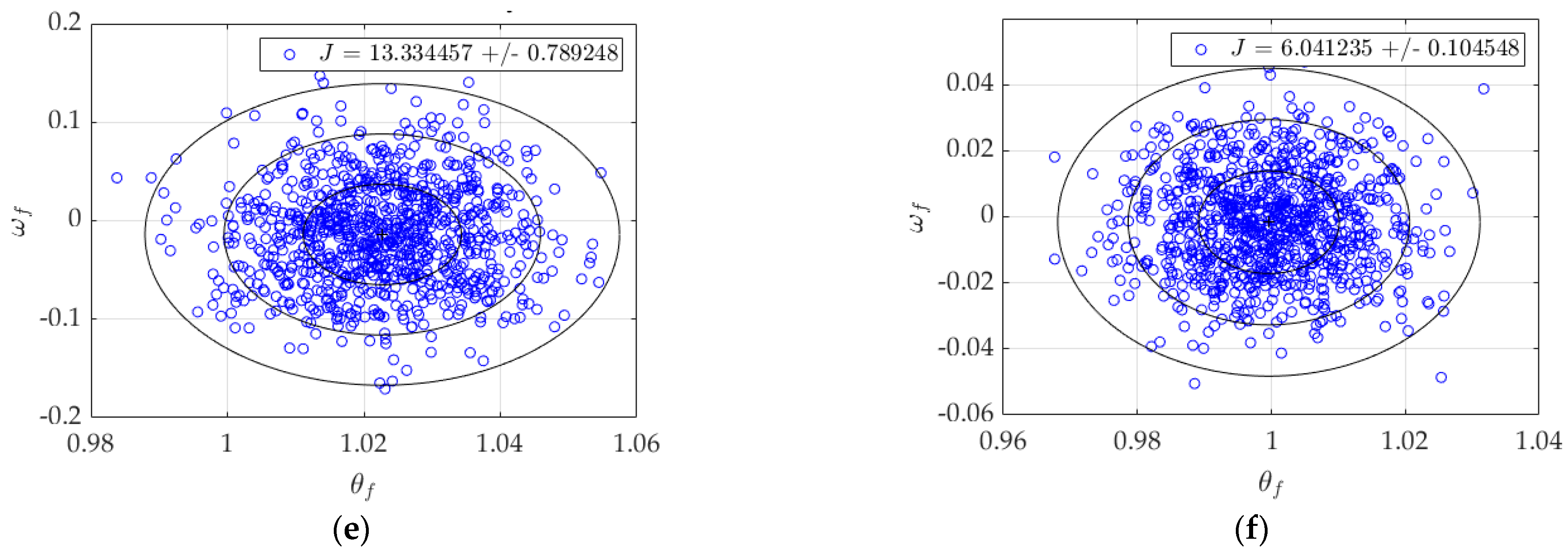
2.6. Patching Filter: Double Integrator, Tuned
2.7. Patching Filter: Control Law Inversion
3. Results and Analysis
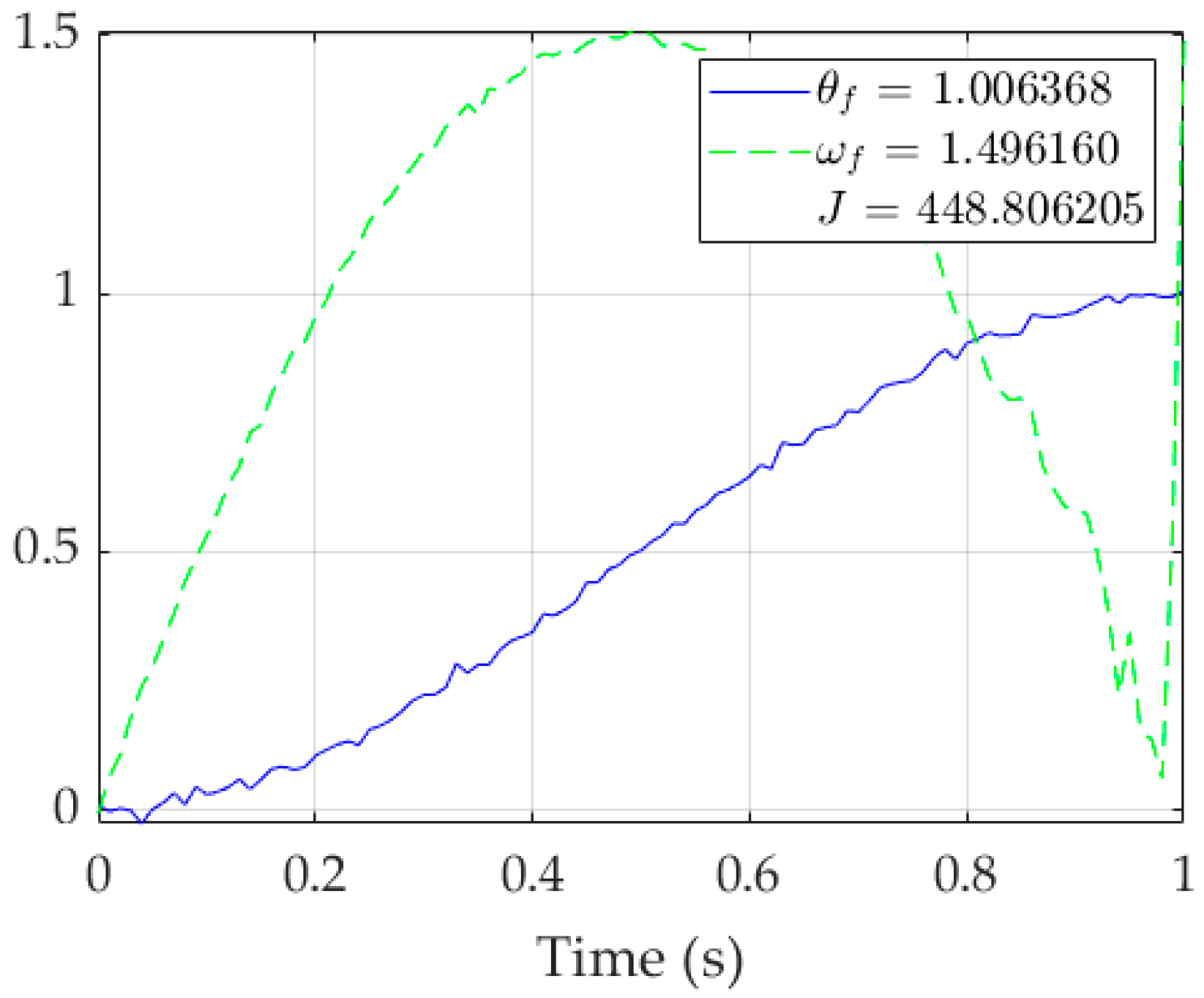
Monte Carlo Simulation
4. Conclusions
4.1. Recapped Research
- Velocity-based classical control was investigated in the prequels and established as the comparative benchmark here where open-loop optimal results in item #2 were used for initial comparison. The controller achieved the best angle tracking deviation, but the worst cost performance.
- Open-loop optimal results were presented analytically providing a performance benchmark for comparing other proposed methods.
- Real-time optimal control was presented and compared to the benchmarks.
- Double-integrator patching filters were introduced seeking to match open-loop optimal results amidst fusion of noisy sensors. These filters achieved the best velocity tracking performance.
- System-inverting patching filters were implemented also seeking to match open-loop optimal results amidst fusion of noisy sensors. These patching filters achieved the best overall performance with notable improvements amidst no dramatic performance degradation in any categories of performance.
4.2. Concluding Results
Author Contributions
Funding
Conflicts of Interest
Appendix A. SIMULINK Simulation Code Used to Replicate the Presented Results








Appendix B. MATLAB Wrapper Code
References
- Hambleton, K. Artemis I Map, 9 February 2018. Available online: https://www.nasa.gov/image-feature/artemis-i-map (accessed on 12 November 2022).
- Mahoney, E. Fast-Track to the Moon: NASA Opens Call for Artemis Lunar Landers, 30 September 2019. Available online: https://www.nasa.gov/feature/fast-track-to-the-moon-nasa-opens-call-for-artemis-lunar-landers/ (accessed on 12 November 2022).
- Media Usage Guidelines. Available online: https://www.nasa.gov/multimedia/guidelines/index.html (accessed on 12 November 2022).
- Sands, T. Comparison and Interpretation Methods for Predictive Control of Mechanics. Algorithms 2019, 12, 232. [Google Scholar] [CrossRef]
- Wang, F.; Gong, X.; Sang, J.; Zhang, X. A Novel Method for Precise Onboard Real-Time Orbit Determination with a Standalone GPS Receiver. Sensors 2015, 15, 30403–30418. [Google Scholar] [CrossRef] [PubMed]
- Xiong, K.; Jiang, J. Reducing Systematic Centroid Errors Induced by Fiber Optic Faceplates in Intensified High-Accuracy Star Trackers. Sensors 2015, 15, 12389–12409. [Google Scholar] [CrossRef] [PubMed]
- Kim, G.; Kim, C.; Kee, C. Coarse Initial Orbit Determination for a Geostationary Satellite Using Single-Epoch GPS Measurements. Sensors 2015, 15, 7878–7897. [Google Scholar] [CrossRef] [PubMed]
- Takayama, Y.; Urakubo, T.; Tamaki, H. Novel Process Noise Model for GNSS Kalman Filter Based on Sensitivity Analysis of Covariance with Poor Satellite Geometry. Sensors 2021, 21, 6056. [Google Scholar] [CrossRef] [PubMed]
- Leake, C.; Arnas, D.; Mortari, D. Non-Dimensional Star-Identification. Sensors 2020, 20, 2697. [Google Scholar] [CrossRef] [PubMed]
- Marin, M.; Bang, H. Design and Simulation of a High-Speed Star Tracker for Direct Optical Feedback Control in ADCS. Sensors 2020, 20, 2388. [Google Scholar] [CrossRef] [PubMed]
- Perov, A.; Shatilov, A. Deeply Integrated GNSS/Gyro Attitude Determination System. Sensors 2020, 20, 2203. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Lü, Z.; Tang, X.; Zhang, K.; Wang, F. LEO-Augmented GNSS Based on Communication Navigation Integrated Signal. Sensors 2019, 19, 4700. [Google Scholar] [CrossRef] [PubMed]
- Christian, J.A. StarNAV: Autonomous Optical Navigation of a Spacecraft by the Relativistic Perturbation of Starlight. Sensors 2019, 19, 4064. [Google Scholar] [CrossRef] [PubMed]
- Fan, Q.; Cai, Z.; Wang, G. Plume Noise Suppression Algorithm for Missile-Borne Star Sensor Based on Star Point Shape and Angular Distance between Stars. Sensors 2019, 19, 3838. [Google Scholar] [CrossRef] [PubMed]
- Opromolla, R.; Fasano, G.; Rufino, G.; Grassi, M. A Model-Based 3D Template Matching Technique for Pose Acquisition of an Uncooperative Space Object. Sensors 2015, 15, 6360–6382. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Nie, H.; Chen, J.; Wang, X. A Velocity-Based Impedance Control System for a Low Impact Docking Mechanism (LIDM). Sensors 2014, 14, 22998–23016. [Google Scholar] [CrossRef] [PubMed]
- Sandberg, A.; Sands, T. Autonomous Trajectory Generation Algorithms for Spacecraft Slew Maneuvers. Aerospace 2022, 9, 135. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Weiping, L. Applied Nonlinear Control; Prentice-Hall: Hoboken, NJ, USA, 1991. [Google Scholar]
- Fossen, T. Comments on Hamiltonian adaptive control of spacecraft by Slotine, J.J.E. and Di Benedetto, M.D. IEEE Trans. Autom. Control 1993, 38, 671–672. [Google Scholar] [CrossRef]
- Sands, T.; Kim, J.; Agrawal, B. Spacecraft fine tracking pointing using adaptive control. In Proceedings of the 58th International Astronautical Congress, Hyderabad, India, 24–28 September 2007; International Astronautical Federation: Paris, France, 2007. [Google Scholar]
- Sands, T.; Lorenz, R. Physics-Based Automated Control of Spacecraft. In Proceedings of the AIAA Space Conference & Exposition, Pasadena, CA, USA, 14–17 September 2009. [Google Scholar]
- Sands, T.; Kim, J.J.; Agrawal, B.N. Spacecraft Adaptive Control Evaluation. In Proceedings of the Infotech@ Aerospace, Garden Grove, CA, USA, 19–21 June 2012; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2012; pp. 2012–2476. [Google Scholar]
- Raigoza, K.; Sands, T. Autonomous Trajectory Generation Comparison for De-Orbiting with Multiple Collision Avoidance. Sensors 2022, 22, 7066. [Google Scholar] [CrossRef] [PubMed]
- Wilt, E.; Sands, T. Microsatellite Uncertainty Control Using Deterministic Artificial Intelligence. Sensors 2022, 22, 8723. [Google Scholar] [CrossRef] [PubMed]
- Ross, I.M. A Primer on Pontryagin’s Principle in Optimal Control; Collegiate Publisher: New York, NY, USA, 2015. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Architecture | J | |||||
|---|---|---|---|---|---|---|
| P+V 1 | 1.0176 | 0.0099 | −0.1128 | 0.0140 | 40.1842 | 0.5979 |
| Open-loop optimal | 1.0029 | 0.0163 | 0.0004 | 0.0220 | 6.0000 | 0.0000 |
| RTOC | 1.0028 | 0.0225 | 0.0087 | 0.0156 | 5.9701 | 0.00001 |
| Double Integrator 1 | 0.8399 | 0.0100 | 1.0640 | 0.0146 | 2.2295 | 0.0560 |
| Double Int., Tuned 2 | 1.0227 | 0.0116 | −0.0140 | 0.0510 | 13.3345 | 0.7892 |
| Control Inversion 1 | 0.9996 | 0.0105 | −0.0016 | 0.0155 | 6.0412 | 0.1045 |
| P+V 1 | 1.0176 | 0.0099 | −0.1128 | 0.0140 | 40.1842 | 0.5979 |
| Architecture | Cost | |||||
|---|---|---|---|---|---|---|
| P+V 1 | 1% | −39% | −28,300% | −36% | 570% | 60% |
| Open-loop optimal | -- | -- | -- | -- | -- | -- |
| RTOC | 0% | 38% | 2075% | −29% | 0% | 0% |
| Double Integrator 1 | −16% | −39% | 265,900% | −34% | −63% | 6% |
| Double Int., Tuned 2 | 2% | −29% | −3600% | 132% | 122% | 79% |
| Control Inversion 1 | 0% | −36% | − | −30% | 1% | 10% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pittella, A.; Sands, T. Proposals for Surmounting Sensor Noises. Sensors 2023, 23, 3169. https://doi.org/10.3390/s23063169
Pittella A, Sands T. Proposals for Surmounting Sensor Noises. Sensors. 2023; 23(6):3169. https://doi.org/10.3390/s23063169
Chicago/Turabian StylePittella, Andre, and Timothy Sands. 2023. "Proposals for Surmounting Sensor Noises" Sensors 23, no. 6: 3169. https://doi.org/10.3390/s23063169
APA StylePittella, A., & Sands, T. (2023). Proposals for Surmounting Sensor Noises. Sensors, 23(6), 3169. https://doi.org/10.3390/s23063169