


Real-Time Laser Interference Detection of Mechanical Targets Using a 4R Manipulator


Abstract
:1. Introduction
2. System Structure and Methods
2.1. System Structure
2.2. Methodology
2.2.1. FT-Based Space Carrier Method
2.2.2. Filtering Based on CBC Filter
2.2.3. Simulation
3. Real-Time Detection
3.1. The BEI Technology
3.2. Testing and Cases
3.2.1. Comparison of Test Results with ZYGO Interferometer
3.2.2. Processing of Seriously Polluted Noise Images
3.2.3. Processing of Annular Interferogram
4. Conclusions
- A 4R mobile manipulator (MM) system has been designed and integrated with the laser ISM system, which is a structural fusion method and has achieved the purpose of real-time online detection. The 4R MM system and the ISM system were designed independently and combined by specific connectors. This has laid the foundation for their respective upgrading and performance improvement, which provides an effective idea for similar laser test projects;
- The existing commercial interferometers are of high accuracy, but most of them are still not suitable for real-time measurement of online machining workpieces in the workshop. Instead, the workpiece needs to be transferred to a specific laboratory to realize the test. Therefore, this testing system was built to achieve real-time measurement in the workshop. Although this design aims at 3D detection, it focuses more on the detection of precise part surfaces, which is actually closer to the measurement of precise flatness of precise part surfaces.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| FPP | Fringe Projection Profilometry |
| SPI | Speckle Pattern Interferometry |
| ISM | Laser Interferometric Sensing Measurement |
| MM | Mobile Manipulator |
| CCD | Charge Coupled Device |
| FT | Fourier Transform |
| FFT | Fast Fourier Transform |
| CBC | Cosine Banded Cylindrical |
| BEI | Bidirectional Extrapolation and Interpolation |
| PST | Phase Shifting Technique |
| SCPS | Space Carrier Phase Shift |
| FPs | Fringe Patterns |
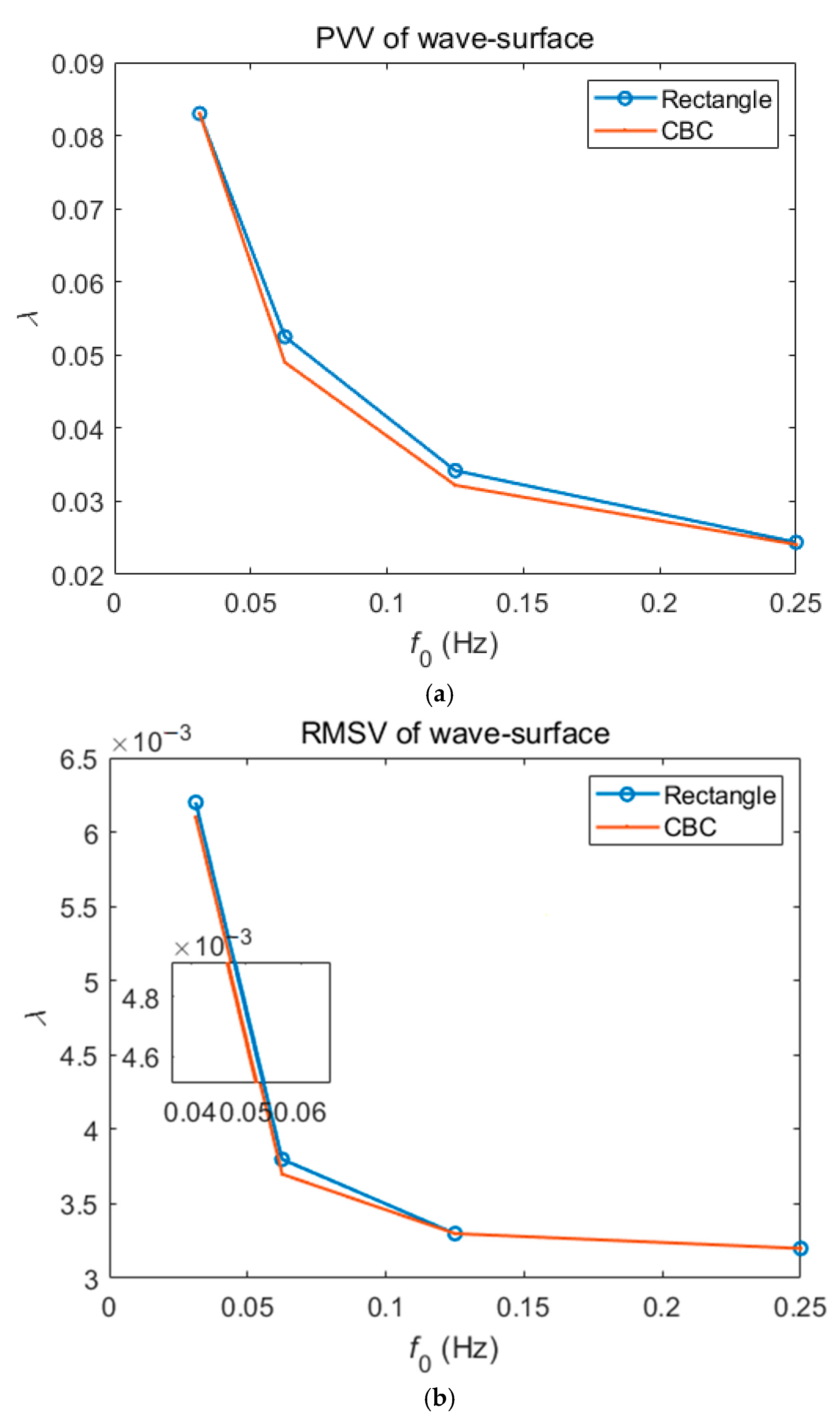
| PVV | Peak and Valley Value |
| RMSV | Root-Mean-Square Value |
| OPD | Optical Path Difference |
| PZT | A Type of Piezoelectric Ceramic Actuator |
| ZYGO | A Type of Interferometer |
References
- Nguyen, H.; Khanh, L.L.; Tran, T.; Wang, Y.; Wang, Z. hNet: Single-shot 3D shape reconstruction using structured light and h-shaped global guidance network. Results Opt. 2021, 4, 100104. [Google Scholar] [CrossRef]
- Wang, Z.Z. Review of real-time three-dimensional shape measurement techniques. Measurement 2020, 156, 107624. [Google Scholar] [CrossRef]
- Lu, L.; Suresh, V.; Zheng, Y.; Wang, Y.; Xi, J.; Li, B. Motion induced error reduction methods for phase shifting profilometry: A review. Opt. Lasers Eng. 2021, 141, 106573. [Google Scholar] [CrossRef]
- Qian, J.; Feng, S.; Xu, M.; Tao, T.; Shang, Y.; Chen, Q.; Zuo, C. High-resolution real-time 360° 3D surface defect inspection with fringe projection profilometry. Opt. Lasers Eng. 2021, 137, 106382. [Google Scholar] [CrossRef]
- An, H.; Cao, Y.; Wu, H.; Zhang, H.; Li, H. The spatial phase-shifting measuring profilometry based on dual-frequency grating. Opt. Lasers Eng. 2021, 143, 106638. [Google Scholar] [CrossRef]
- Wang, J.; Yang, Y. 3D surface reconstruction scheme for dynamic objects: Principle and implementation. Measurement 2022, 201, 111718. [Google Scholar] [CrossRef]
- Nguyen, H.; Novak, E.; Wang, Z. Accurate 3D reconstruction via fringe-to-phase network. Measurement 2022, 190, 110663. [Google Scholar] [CrossRef]
- Feng, S.; Zuo, C.; Zhang, L.; Tao, T.; Hu, Y.; Yin, W.; Qian, J.; Chen, Q. Calibration of fringe projection profilometry: A comparative review. Opt. Lasers Eng. 2021, 143, 106622. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Lee, J.; Ghim, Y.-S.; Rhee, H.-G. Real-time 3D measurement of freeform surfaces by dynamic deflectometry based on diagonal spatial carrier-frequency pattern projection. Measurement 2022, 200, 111684. [Google Scholar] [CrossRef]
- Sun, L.; Yu, Y.; Zhou, W. 3D deformation measurement based on colorful electronic specklepattern interferometry. Optik 2015, 126, 3998–4003. [Google Scholar] [CrossRef]
- Ye, Y.; Li, X.; Xu, Y.; Ding, L.; Su, Z.; Huang, Y.; Guo, X.; Zhang, D. Simultaneous 3D measurement for infrared chips with speckle interferometry. Opt. Laser Technol. 2022, 153, 108199. [Google Scholar] [CrossRef]
- Bianco, G.; Bruno, L.; Girkin, C.A.; Fazio, M.A. Full-field displacement measurement of corneoscleral shells by combining multi-camera speckle interferometry with 3D shape reconstruction. J. Mech. Behav. Biomed. 2020, 103, 103560. [Google Scholar] [CrossRef]
- Etchepareborda, P.; Moulet, M.-H.; Melon, M. Random laser speckle pattern projection for non-contact vibration measurements using a single high-speed camera. Mech. Syst. Signal Pract. 2021, 158, 107719. [Google Scholar] [CrossRef]
- Khan, D.; Kim, M.Y. High-density single shot 3D sensing using adaptable speckle projection system with varying preprocessing. Opt. Lasers Eng. 2021, 136, 106312. [Google Scholar] [CrossRef]
- Senthan, M.; Khurram, K.; Mujib, R. A review of three-dimensional imaging technologies for pavement distress detection and measurements. IEEE Trans. Intell. Transp. 2015, 16, 2353–2362. [Google Scholar]
- Scislo, L. Single-point and surface quality assessment algorithm in continuous production with the use of 3D laser doppler scanning vibrometry system. Sensors 2023, 23, 1263. [Google Scholar] [CrossRef]
- Ji, Z.W.; Wang, P.; Jia, J.; Ding, Y.; Zhao, K.; Liu, T. Development of mobile robot system based on nano-scale micro-surface measurement. J. Phys. Conf. 2022, 2173, 012033. [Google Scholar] [CrossRef]
- Liu, J.K. Robot Control System Design and MATLAB Simulation. the Advanced Design Method; Tsinghua University Publishing Company: Beijing, China, 2018; pp. 287–337. [Google Scholar]
- Liu, J.K. Robot Control System Design and MATLAB Simulation. the Basic Design Method, 2nd ed.; Tsinghua University Publishing Company: Beijing, China, 2022; pp. 42–178. [Google Scholar]
- Bahich, M.; Afifi, M.; Barj, E. A numerical spatial carrier for single fringe pattern analysis algorithm. Optik 2011, 20, 11–15. [Google Scholar] [CrossRef]
- Xu, J.C.; Qiao, X.; Chen, J.P. Spatial-carrier phase-shifting algorithm based on least-squares iteration. Chin. J. Laser 2008, 35, 593–596. [Google Scholar] [CrossRef]
- Maciel, J.M.; Gonzalez, M.M.; Duran-Ramírez, V.M.; Casillas-Rodriguez, F.J.; Peña-Lecona, F.G. Spatial carrier phase shifting method for the phase recovery from two interferograms with closed fringes. Opt. Commun. 2019, 437, 226–230. [Google Scholar] [CrossRef]
- Wang, H.; Sun, Z.; Zhong, L.; Li, J.; Zou, H.; Ning, Q.; Lu, X. Fast and high precision spatial carrier frequency phase shifting algorithm based on the second order difference. Opt. Commun. 2020, 454, 124310. [Google Scholar] [CrossRef]
- Kemao, Q. Carrier fringe pattern analysis: Links between methods. Opt. Lasers Eng. 2022, 150, 106874. [Google Scholar] [CrossRef]
- Ma, Y.; Yin, D.; Wei, C.; Feng, S.; Ma, J.; Nie, S.; Yuan, C. Real-time 3-D shape measurement based on radial spatial carrier phase shifting from circular fringe pattern. Opt. Commun. 2019, 450, 6–13. [Google Scholar] [CrossRef]
- Dai, M.; Wang, Y. Fringe extrapolation technique based on Fourier transform for interferogram analysis. Opt. Lett. 2009, 34, 956–958. [Google Scholar] [CrossRef]
- Dong, Z.; Cheng, H. Highly noise-tolerant hybrid algorithm for phase retrieval from a single-shot spatial carrier fringe pattern. Opt. Lasers Eng. 2018, 100, 176–185. [Google Scholar] [CrossRef]
- Dong, Z.; Chen, Z. Advanced Fourier transform analysis method for phase retrieval from a single-shot spatial carrier fringe pattern. Opt. Lasers Eng. 2018, 107, 149–160. [Google Scholar] [CrossRef]
- Imran, M.; Chaudhary, A.A.; Ahmed, S.; Alam, M.; Khan, A.; Zouli, N.; Hakami, J.; Rudayni, H.A.; Khan, S.-U. Iron oxide nanoparticle-based ferro-nanofluids for advanced technological applications. Molecules 2022, 27, 7931. [Google Scholar] [CrossRef]
- Wu, X. Study on the Key Technologies of In-Situ Stitching Interferometric Test for Large Optics. Ph.D. Thesis, Shanghai University, Shanghai, China, 2017. [Google Scholar]
- Karacali, T.; Hasar, U.C.; Ozbek, I.Y.; Oral, E.A.; Efeoglu, H. Novel design of porous silicon based sensor for reliable and feasible chemical gas vapor detection. J. Light. Technol. 2013, 31, 295–305. [Google Scholar] [CrossRef]
- Ahmed, S.; Khatun, S.; Sallam, S.; Ansari, A.; Ansari, Z.A.; Kumar, R.R.; Hakami, J.; Khan, A. Photoresponse of porous silicon for potential optical sensing. Europhy. Lett. 2022, 139, 36001. [Google Scholar] [CrossRef]
- Hamann, I.; Sanjuan, J.; Spannagel, R.; Gohlke, M.; Wanner, G.; Schuster, S.; Guzman, F.; Braxmaier, C. Laser-dilatometer calibration using a single-crystal silicon sample. Int. J. Optomechatron. 2019, 13, 18–29. [Google Scholar] [CrossRef]
- Wang, X.; Liu, D.; Zhang, Z. The regularized phase tracking technique used in single closed interferogram phase retrieval. Chinese Opt. 2019, 12, 719–729. [Google Scholar] [CrossRef]
- Maciel, J.M.; Rodríguez, F.J.C.; González, M.M.; Peña-Lecona, F.G.; Duran-Ramírez, V.M.; Gómez-Rosas, G. Phase recovery from a single interferogram with closed fringes by phase unwrapping. Appl. Opt. 2011, 50, 22–27. [Google Scholar] [CrossRef]
- Liu, T.; Ding, Y.; Wang, P.; Zhao, K.; Jia, J. Stability control of transport robot based on iterative learning control. J. Phys. Conf. 2022, 2173, 012061. [Google Scholar] [CrossRef]
- Ji, Z.W. Design of Double-Loop Trajectory Tracking Control System for Mobile Robot. Master’s Thesis, Shandong University of Science and Technology, Qingdao, China, 2023. [Google Scholar]
- Zygo Corporation. Surface Texture Parameters. Available online: https://www.docin.com/p-1429166024.html (accessed on 12 February 2022).
- Machineni, R.C.; Spoorthi, G.E.; Vengala, K.S.; Gorthi, S.; Gorthi, R.K.S.S. End-to-end deep learning-based fringe projection framework for 3D profiling of objects. Comput. Vis. Image Underst. 2020, 199, 103023. [Google Scholar]
- Zhu, R.; Zhou, J.; Zhang, M.; Chen, P. Research on fringe region spreading method based on iterative Fourier transform. J. Jinling Inst. Technol. 2021, 37, 22–27. [Google Scholar]
- Daheng Imaging. Available online: https://www.daheng-imaging.com/product/frame-grabbers/#menudiv (accessed on 26 February 2022).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title 1 | f0 = 2/256 | f0 = 4/256 | f0 = 8/256 | f0 = 16/256 | f0 = 32/256 | f0 = 64/256 | f0 = 128/256 |
|---|---|---|---|---|---|---|---|
| Rec_PVV 1 | 0.8864 | 0.1368 | 0.0830 | 0.0525 | 0.0342 | 0.0244 | invalid |
| Rec_RMSV | 0.1403 | 0.0167 | 0.0062 | 0.0038 | 0.0033 | 0.0032 | invalid |
| CBC_PVV | 0.9579 | 0.1647 | 0.0830 | 0.0490 | 0.0320 | 0.0241 | invalid |
| CBC_ RMSV | 0.1325 | 0.0191 | 0.0061 | 0.0037 | 0.0033 | 0.0032 | invalid |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Ji, Z.; Ding, Y.; Zhu, Y. Real-Time Laser Interference Detection of Mechanical Targets Using a 4R Manipulator. Sensors 2023, 23, 2794. https://doi.org/10.3390/s23052794
Liu T, Ji Z, Ding Y, Zhu Y. Real-Time Laser Interference Detection of Mechanical Targets Using a 4R Manipulator. Sensors. 2023; 23(5):2794. https://doi.org/10.3390/s23052794
Chicago/Turabian StyleLiu, Tingrui, Zhongwei Ji, Yan Ding, and Youfeng Zhu. 2023. "Real-Time Laser Interference Detection of Mechanical Targets Using a 4R Manipulator" Sensors 23, no. 5: 2794. https://doi.org/10.3390/s23052794
APA StyleLiu, T., Ji, Z., Ding, Y., & Zhu, Y. (2023). Real-Time Laser Interference Detection of Mechanical Targets Using a 4R Manipulator. Sensors, 23(5), 2794. https://doi.org/10.3390/s23052794