1. Introduction
The digitization of historical ambrotypes, daguerreotypes, and other photographic materials is incredibly important. First, it allows us to preserve these fragile and delicate items for future generations. Without digitization, many of these items would be at risk of being lost or damaged due to age and environmental factors.
Second, digitization makes these items more accessible to researchers and the general public. Instead of having to visit a physical archive or museum, people can now view these photographs online, making it easier for them to study and appreciate them.
Third, digitization allows us to enhance and improve these photographs. With the use of specialized software, we can restore damaged or faded images, bringing them back to life and making them more legible. We can also make high-resolution copies of these photographs, which can be used for research and educational purposes.
Overall, the digitization of historical ambrotypes, daguerreotypes, and other photographic materials is essential for preserving our cultural heritage and making it more accessible to the public. It allows us to protect these items for future generations and unlock the valuable information and stories they contain. Digitization facilitates the preservation of original heritage objects and provides a digital equivalent available for further study. This is especially important in information-bearing artifacts and paper-based artifacts. The emphasis on digitization may lead to the misconception that information matters, whereas the physical preservation of the artifact does not [
1]. Digitization is not preservation. However, digital copies of paper documents may be used for further material analysis protecting valuable originals from handling.
Virtualization of cultural or natural heritage has become an important part of the knowledge economy. We create the digital twins using the hi-tech CRUSE CS 220ST1100 contactless scanner, providing high precision both in geometry and radiometry. We report on our “multiple ground truths” findings in the context of the digitization of hundreds of thousands of museum originals (cultural objects) in Slovakia.
We experimented with sharpening, scanning mode selection, and properties of scans. In this paper, we offer a detailed description of the in-depth processing of a triplet of intentionally selected hard-to-photograph originals. They are named by the creation procedure, i.e., daguerreotype, ambrotype, and tintype (DAG, AMB, and TIN for short).
Globally, there are a few major initiatives, aggregators, or harvesters of the daily growing volume of online heritage items, including scanned paintings or photographs from more than 7000 heritage institutions. Google Arts and Culture (formerly Google Art Project) [
2] is an online platform of high-resolution images and videos of artworks and cultural artifacts from 2000+ partner cultural organizations throughout the world. Europeana [
3] is a virtual repository of artworks, literature, cultural objects, relics, and musical recordings/writings from over 2000 European institutions. The Digital Museum Canada (formerly Virtual Museum of Canada) [
4] is a virtual collection presenting content from more than 3000 Canadian heritage institutions. Wikipedia GLAM [
5] (“galleries, libraries, archives, and museums”, also including botanic and zoological gardens) helps cultural institutions share their resources with the world through collaborative projects with experienced Wikipedia editors, as report the authors of Wikipedia article on Google Arts and Culture. Rare originals from a local collection at the Academy of Fine Arts and Design (AFAD) (
Figure A1) will be available through both Europeana and Google Arts and Culture. This will happen after being included in Slovakiana [
6], which is guided only in the Slovak language. All three are used for the education of restoration experts, supported by, e.g., a textbook [
7]. In the area of digitized old photographing techniques, there is major computer research being done within generative adversarial network (GAN) methods for the digital restoration of damaged photographs, e.g., [
8]; in our work, we will not reflect on digital restoration of the photographs.
2. Materials and Methods
2.1. Materials, a Triplet of Cultural Objects
In total, we studied 3 material originals (cultural objects) and utilized 2 sensors (a scanner and an eye tracker). The primary data in the real-world documented three discoveries in the evolution of photography, daguerreotype, ambrotype, and tintype. Using 16 scanning modes with the given parameters, we obtained secondary data, which are described in the next section and were deposited in a publicly available website under the Creative Commons license [
9]. Moreover, the samples of processed images were provided in the same way. Unlike tintypes, daguerreotypes and ambrotypes [
10,
11] belong to the group of cased photographic objects [
12,
13,
14]. The examined photographs are from the Photographic reference collection at AFAD. The Laboratory of Restoration of Photography deals with research, identification, and the actual restoration of various types of photographic techniques [
15]. Emphasis is placed on the gradual acquisition of current non-destructive research techniques and the subsequent choice of restoration intervention. The advantages that we see in using the CRUSE scanning modes versus high-definition photographic images on photographic objects are mainly in the ability to scan objects in very high magnification.
2.1.1. DAG
All DAG scans are shown in
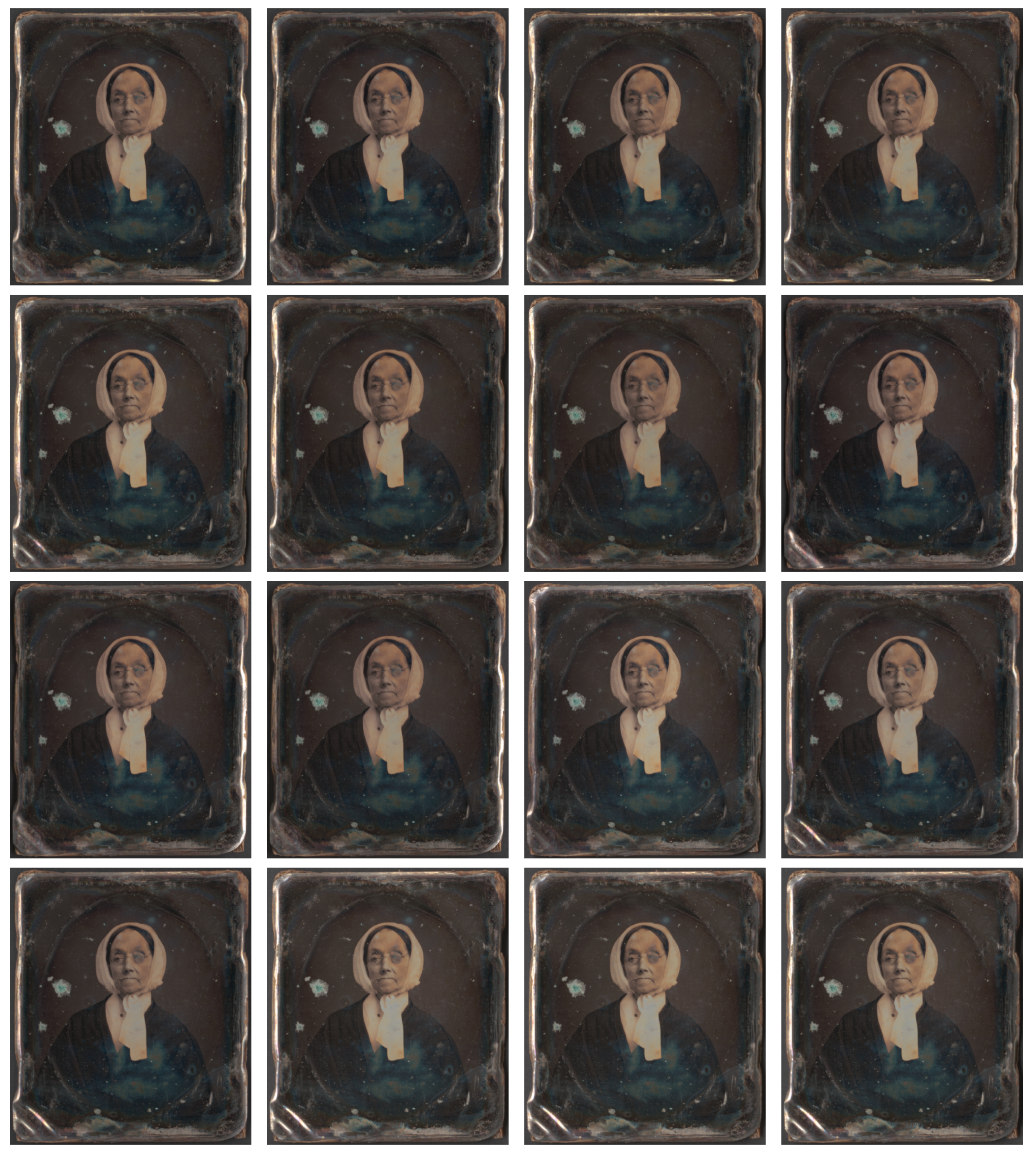
Appendix A Figure A2. The daguerreotype was the first commercially patented photographic process in 1839 by Louis Daguerre in France. From the material point of view, a daguerreotype is a very complex object consisting of a thin sheet of copper, coated with highly polished silver, and sensitized by iodine fumes exposed in the camera. Afterward, the exposure image is developed in the fumes of mercury and fixed with sodium thiosulfate. As a finish, the object was housed in a protective case, due to its very sensitive nature.
The daguerreotype in
Figure A2 was chosen for the examination because it is a good example of this technique. It is a bare plate (missing the protective case), degraded physically and chemically. In general, daguerreotypes have very reflective surfaces, such as a mirror; therefore, it is complicated to photograph them. The scanner has the advantage of minimizing the mirroring effect and the ability to emphasize the actual image.
The following DAG metadata will serve for image documentation, cataloging, and/or retrieval.
Category: historic photo.
Subcategory: reference object for study purposes.
Administered by: University of Fine Arts in Bratislava, Department of Restoration, and Department of Photography and New Media.
Description of the object: The daguerreotype shows a portrait of an elderly woman with glasses and a scarf. The original decorative protective packaging of the daguerreotype is absent.
Technique: daguerreotype
Physical description: number 1, width 70.0 mm, height 80.0 mm.
Degree of authenticity: original.
Legal Status: free.
Inventory number: F-00046-DAG.
Identifier: this field will be supplied according to the future virtual exhibition (e.g., in Europeana).
The original daguerreotype was scanned in
LRFB (scanning mode first) at a 600 ppi resolution, 48-bit RGB,
cm was the original height, with
gain settings. The resulting TIFF file size is about 30 MB and, for further processing, the master scan was converted using GIMP into the PNG file of 21.5 MB. Scan number 1831 refers to the number of scans after the previous scanner calibration. All scans were of the same size, as given by the original width and height, 70 × 80 mm. The naming convention stores the settings, e.g.,
Dagero 600.00 ppi LRFB Gain 1.10 0.250 cm 1 831.tif, see
Figure A2 in
Appendix A.
2.1.2. AMB
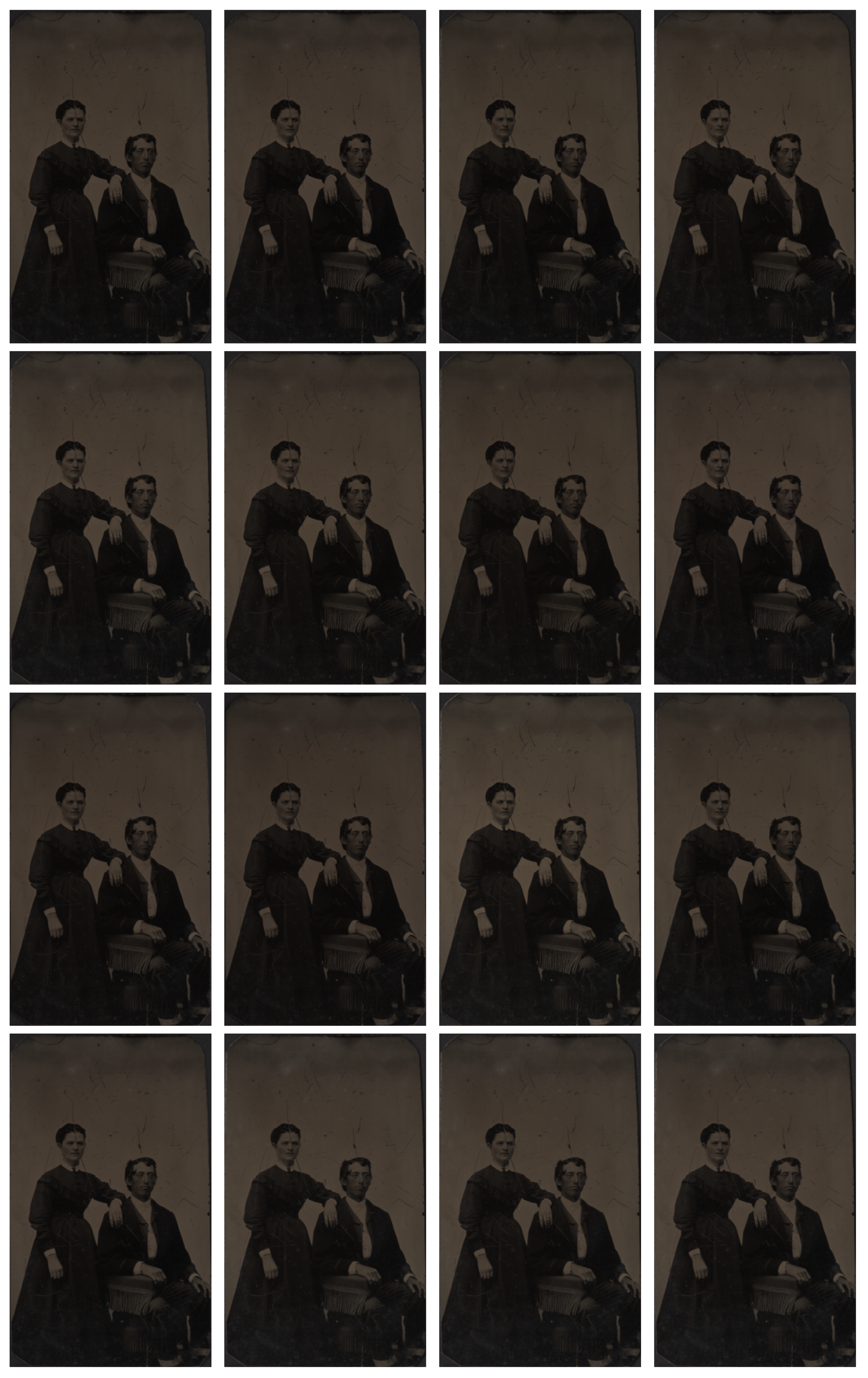
The ambrotype process was invented by Frederick Scott Archer in the 1840s in England. Collodion is poured on a clean sheet of glass, and while still wet, it is dipped into the solution of silver nitrate, exposed in the camera, and fixed. The result is a negative image on the glass. In 1850, Louise Désire Blanquart-Evrard discovered that this image could appear positive when placed on a dark backing. This was possibly due to very little or no silver in the shadows allowing the black background to show through the glass. Due to the very fragile nature of glass, the ambrotypes were housed in protective cases and frames same as daguerreotypes.
The ambrotype in
Appendix A Figure A1 is a representative example of the ambrotype image. Ambrotypes are hard to be photographed because they are 3D objects; there is a glass with an image on its verso and the black backing is underneath it. Thus, one looks through the thick glass to see the image underlaid with a black backing (which is not always in direct contact with the image; sometimes it is heavily degraded or is missing completely). All AMB scans are shown in
Appendix A Figure A1.
The following AMB metadata will serve for image documentation, cataloging, and/or retrieval.
Category: historic photo.
Subcategory: reference object for study purposes.
Administered by: University of Fine Arts in Bratislava, Department of Restoration, and Department of Photography and New Media.
Description of the object: The ambrotype depicts a portrait of a seated man and a standing woman. The work is heavily hand-colored in the area of the face, hands, and jewelry of the figures. The ambrotype is inserted into a decorative protective cover/cassette, the front closing part of which is absent.
Technique: ambrotype.
Physical description: number 1, ambrotype width with cassette 83.0 mm, ambrotype height with cassette 96.0 mm.
Degree of authenticity: original.
Legal Status: free.
Inventory number: F-00047-AMB.
Identifier: this field will be supplied according to the future virtual exhibition (e.g., in Europeana).
2.1.3. TIN
The ferrotype (tintype) technique belongs to the group of melanotypes and it is inspired by the ambrotype–collodion negative with a black background. Instead of glass, which is overlaid with black paper, velvet, varnish, or paint on a collodion negative background, was designed in 1853 by the French teacher Adolphe Alexandre Martin (1824–1896) to apply the emulsion to a thin black lacquered sheet of iron plate. Black paint was applied to the plate colored paint, varnish (japaning), or enamel. The commonly used term tintype is garbled by transference of meaning because in fact tin was not used, but an iron plate (lat. ferrum). A wet collodion process was used on black iron sheets. Ferrotypes have little contrast, whites are a soft gray, and detail is lost in the shadows. Ferrotype (tintype) was used from 1853 until 1950 when it was still used by street photographers in Turkey or India. As a customer, you could buy a photograph right on the street, made in two minutes.
The following tin metadata will serve for image documentation, cataloging, and/ or retrieval.
Category: historic photo.
Subcategory: reference object for study purposes.
Administered by: University of Fine Arts in Bratislava, Department of Restoration, and Department of Photography and New Media.
Description of the object: The ferrotype shows a portrait of a seated man and a standing woman. The work is in the area the faces and hands of the characters are gently colored by hand.
Technique: ferrotype, tintype.
Physical description: number 1, width 61.0 mm, height 103.0 mm.
Degree of authenticity: original.
Legal Status: free.
Inventory number: F-00048-TIN.
Identifier: this field will be supplied according to the future virtual exhibition (e.g., in Europeana).
2.2. Methods, Modeling the Scanner Focusing, InfoVis, Eye Tracking
We divide the originally designed workflow into naturally given groups of methods. 1. We explain the standard scanner settings of a given push-broom camera [
16] and the mathematical model of the manual sharpening process, based on the Fourier transform. 2. Within a data state reference model in information visualization [
17], we visualize and distinguish properties of scanning modes. This was done by transforming the image differencing problem to a well-studied assignment problem, using Harris corners [
18] or Co-SIFT feature points [
19] 3. We analyze the differences between various scans by multiple image quality metrics. 4. The qualitative evaluation by restoration experts from the Laboratory of Restoration of Photography [
15] is supported by eye-tracking measurements of their perception.
2.2.1. Contactless Scanning
The CRUSE scanner CS 220ST1100 (CCD “14.400 Pixel Tri Linear RGB Line-Sensor” with Schneider optics) offers 4 light sources
LRFB (left, right, front, back) and
LRFB scanning mode is the default one for heating the lamps, which requires 30 min. This starting mode is the fastest one. Another mode, recommended for scanning artwork, is
LTx, which better documents the fine relief of the given original. It is possible to scan the given scan-line of real artwork under constant illumination accurately up to 1200 ppi (pixels per inch) in the TIFF format. The scanned original weight may be up to 300 kg, measuring 120 × 180 × 30 cm [
20]. The current software CSx does not create a 3D model, but allows for precise scanning with variable illumination, 15° sensor rotation, and variable depth of field, thus offering dozens of scan versions of a single original. The ultimate and unique truth does not exist here. Consequently, there are many best scans, each one for a given mode and settings. The wooden decors illustrate a sample from natural heritage [
21]. From cultural heritage we selected hard-to-distinguish cases, such as ambrotypes, daguerreotypes [
19,
21], synagogue plans, or handmade papers [
22]. For educational purposes, Comenius University students created virtual herbarium, 3D models using photogrammetry, depth of field, or shadows [
23].
The CRUSE scanner offers different light modes: LRFB, LR, LFB, LF, LTx, LTx 5cm, LTx 10cm, RTx, RTx 5cm, RTx 10cm, LLa, LRFB 15deg, LR 15deg, LFB 15deg, LF 15deg, L 15deg. They can be subdivided into several groups using several criteria, i.e., symmetric, rotated, and shifted. Their effect is captured in scans. Given pairs of scans are hard to distinguish by the naked eye. Using computer vision methods we can either segment the objects to support the semantics or mimic the human vision by low-level operations, adding points and edges first or image evaluation then. The computed and perceived versions of interpretation can be consequently compared to gain more insight. We elaborate on this approach in more detail in the following parts.
2.2.2. Perceptually Meaningful Dot Patterns and Density
The motivation for adding edges into the image data after Toussaint in 1980 [
24]:
In… computational approaches to perception… it is desired to find some structure in the form of edges connecting the subset of the pairs of points... such that the final graph obtained is perceptually meaningful in some sense.
The proposed solution by Toussaint was a relative neighborhood graph (RNG), a superset of the minimum spanning tree (MST), and the subset of Delaunay triangulation (DT). Our idea was to relax from the connected visual descriptor or spanner (MST, RNG) by connecting the dots with the “Hungarian” edges [
25,
26]. For adding dots, we experimented with searching the gray level Harris corners [
18] and concurrent color channels coSIFT [
27]. The latter performed better on Cruse scans and already the density of Harris or coSIFT corners indicated “interesting parts” in scanned wooden decors. For more details on the Hungarian edges approach, refer to [
19,
21]. Methodologically, adding corners and edges can serve for image (or scanning mode) differentiation in terms of the data state reference model in information visualization [
17]. The primary scan is analytically abstracted with added feature points, which are consequently visualized by adding edges and displayed. Note that DT edges can be too long for certain dot configurations but the Hungarian edges’ total length is warranted to be minimal.
Technically, three sequential processes occur with visual data: acquisition, representation, and processing/simulation of human vision. These processes support understanding and ultimately lead to a decision. Metaphorically, an inexperienced cultural object owner might view the resulting versions in a similar way to how people used to observe the night sky, i.e., by identifying the brightest stars in a given area, connecting them with edges, and then searching for suitable symbolism. Our approach can be helpful in the early stages by providing different corners and edges.
In this study, we move away from focusing on edges because we can directly associate the density of dots with appealing image components, such as salient regions, or semantic primitives, such as human faces. These elements can ultimately contribute to the overall meaning of a portrait.
Image quality measuring is based on an assumption that there exists one ideal, ground truth image. If such an image is not available, we have to give up the algorithmic problem-solving, inevitably opt for the heuristic approach, and select one of the available options as a relatively quality prototype. For multiple sensors, the quality evaluation of nearly identical images was proposed, e.g., in [
28]. This scenario can be observed in CRUSE scanning multiple modes offered by the CSx software tool. The authors in [
21] compared
LRFB scans (in the role of ground truth) against other ones, using the Harris corner detector, Hungarian edges, and SSIM (structural similarity index measure) comparisons. This detector suffered from a low count of Harris corners for certain hard-to-scan images. Our goal in coSIFT [
27] research was to improve the gray level method [
21] by a more color-sensitive corner detector, which we describe in detail below. These data will be used to compute the coSITF heatmaps, which will be confronted with the measured heatmaps from the evaluation of eye-tracking sessions.
2.2.3. Eye Tracking Session
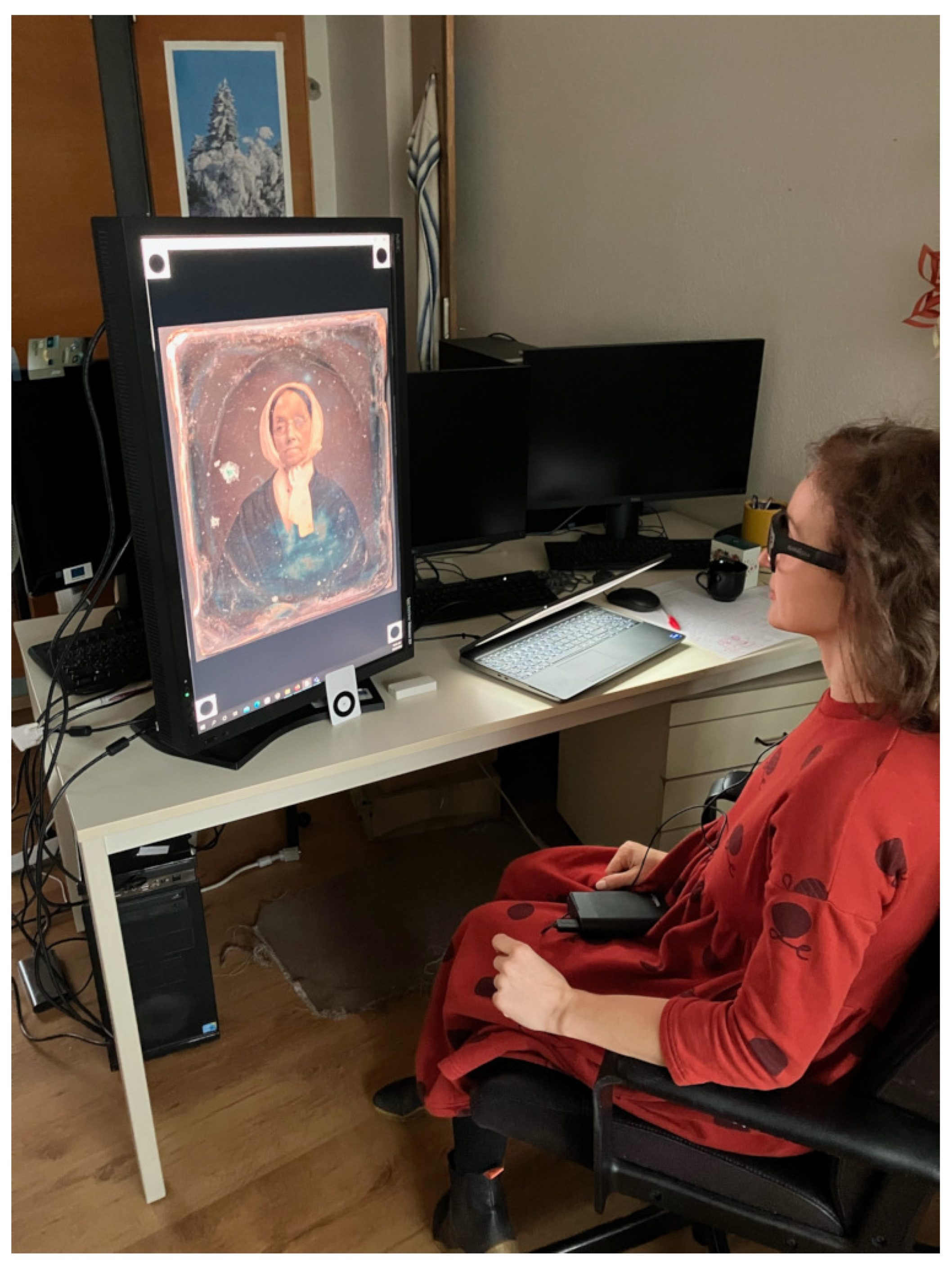
To find out which parts of the scanned images are important or interesting for the experts from the Academy of Fine Arts and Design, we recorded their eye movements during an eye-tracking session. The data were collected during a free-viewing of three different digitized photographs, scanned with different scanning modes.
Two restoration professionals with at least five years of experience in the field participated in the study. The participants were seated in front of a computer monitor and asked to view scans of Ambrotype, Daguerreotype, and Tintype photographs. The eye-tracking equipment recorded the participants’ gaze patterns as they viewed the scans. The recording took 5 minutes for each participant. The eye-tracking data were analyzed to determine the visual attention patterns of the participants. The setup of the session can be seen in
Figure 1.
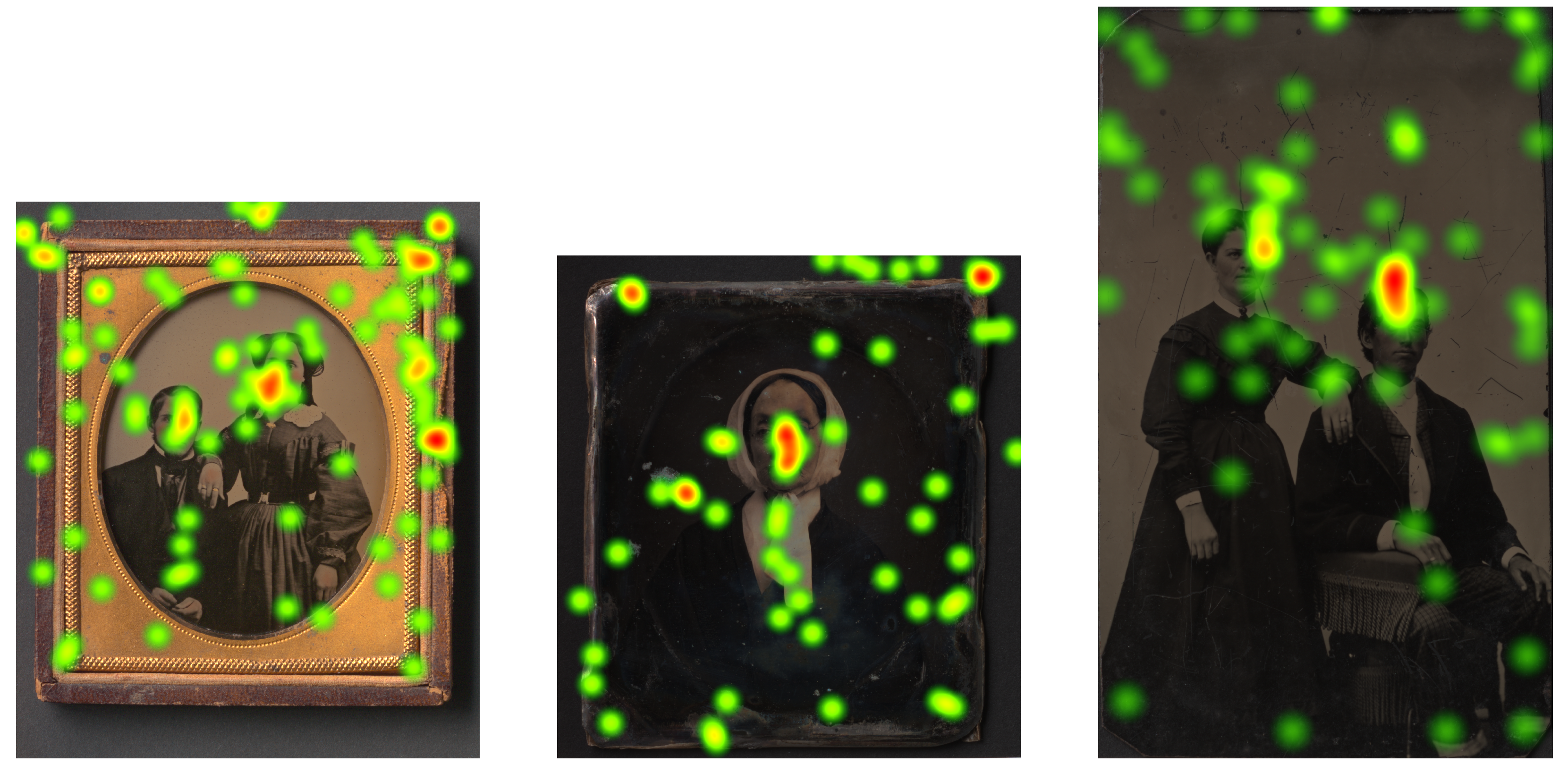
At the beginning of each recording, the eye tracker was calibrated. The calibration precision for the first participant was 92% for the second one 95%. The focus of the visual attention of participants can be visualized using heatmaps. They show how looking is distributed over the images. heatmaps obtained from our eye tracking session can be seen in
Figure 2. The heatmaps were generated using the software Tobii Pro Lab [
29].
2.2.4. Eye Tracker Tobii
We used Tobii Pro Glasses 3 (
Figure 3), the third-generation wearable eye-tracking glasses, to capture areas of interest in the images. Tobii Pro 3 glasses provide robust eye tracking and accurate gaze data while giving users freedom of movement. The glasses contain 16 illuminators and 4 eye cameras integrated into scratch-resistant lenses, to provide optimal eye-tracking performance and create an unobstructed view for the user. The scene camera offers a wide field of view (106° H: 95°, V: 63°).
2.3. Co-SIFT
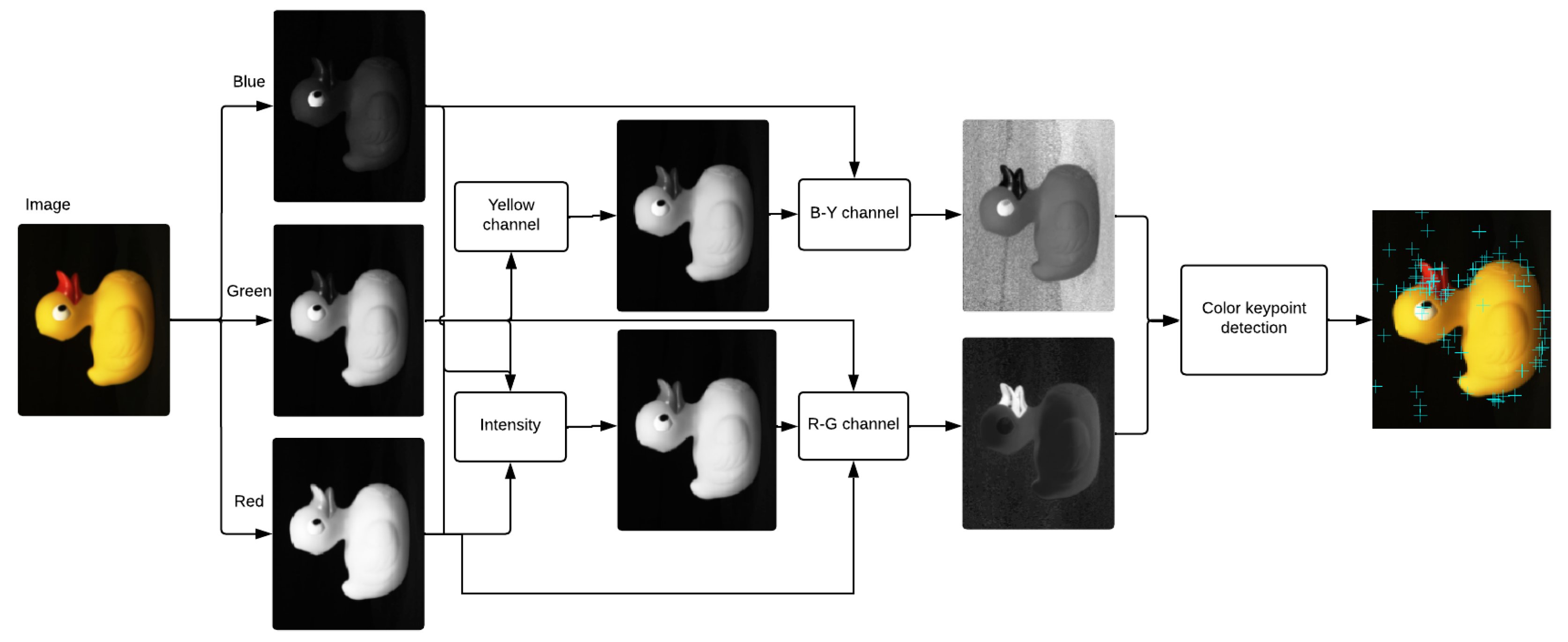
Although the color is perceived as an irreplaceable element describing the world around us, the techniques for extracting the local features are mostly based on the description of the shape, while the color information is entirely ignored. The pipeline of the proposed Co-SIFT [
27] algorithm is illustrated in
Figure 4. The key idea of our solution is to incorporate color information from the image into the SIFT method by replacing grayscale information so that key points are detected on two separate chromatic channels separately (red–green (
) and a yellow–blue (
)) and the achromatic brightness channel. Individual steps of the algorithm are described in detail in the following subsections.
2.3.1. Pre-Processing
Stephen Engel et al. in [
30] examined the human visual cortex and its color matching using magnetic resonance. The human visual cortex processes signals from photoreceptors on the retina of the eye and interprets the color information. The authors [
31] experimentally found that the strongest response is to red–green stimuli. In yellow-blue stimuli, the reaction is also strong, but compared to red–green stimuli, it decreases rapidly. The combination of the trichromatic process and the opponent color-coding process was until recently considered impossible. The trichromatic process, however, speaks of composing colors from several cones, the process of the opponent’s colors, on the other hand, involves finding the colors from their differences. However, the eye works on a much more complicated level, and these two processes perfectly combine. Therefore, as a basic model for our method, we chose, an approach based on experiments in [
30], using chromatic opponent channels proposed in [
32] and trichromatic color theory, for color image processing and the SIFT method.
The intensity channel (
1) is computed as the weighted average of the
R,
G, and
B values, where the weights were acquired by measuring the intensity perceived by the people with undisturbed trichromatic vision. The weights are the same as used in the standard sRGB space by [
33]
In this color space, the two chromatic channels (
and
) proposed in [
34] are normalized by the intensity channel, which removes the effect of intensity variations. The channels are defined as follows
and
where
Now we proceed with the detection of the interesting points in the chromatic channels.
2.3.2. Interesting Point Detection
SIFT algorithm introduced by [
35] consists of a scale and rotation invariant detector and a HOG (histogram of oriented gradients) descriptor. SIFT detector uses a Gaussian scale pyramid. The image is scaled to
K sizes–octaves. Each octave is then recurrently filtered by a 2D Gaussian.
Two consecutive images in each octave are then subtracted and the resulting DoG (difference of Gaussian) images are approximations of LoG (Laplacian of Gaussian) images. The points of interest are identified in the 3 × 3 × 3 neighborhood in the DoG space. The octave in which the interesting point was found represents the “scale” of the IP and determines the size of the neighborhood for descriptor extraction of that point.
In our method, the Co-SIFT interesting point detection is applied directly to each opponent’s chromatic channel.
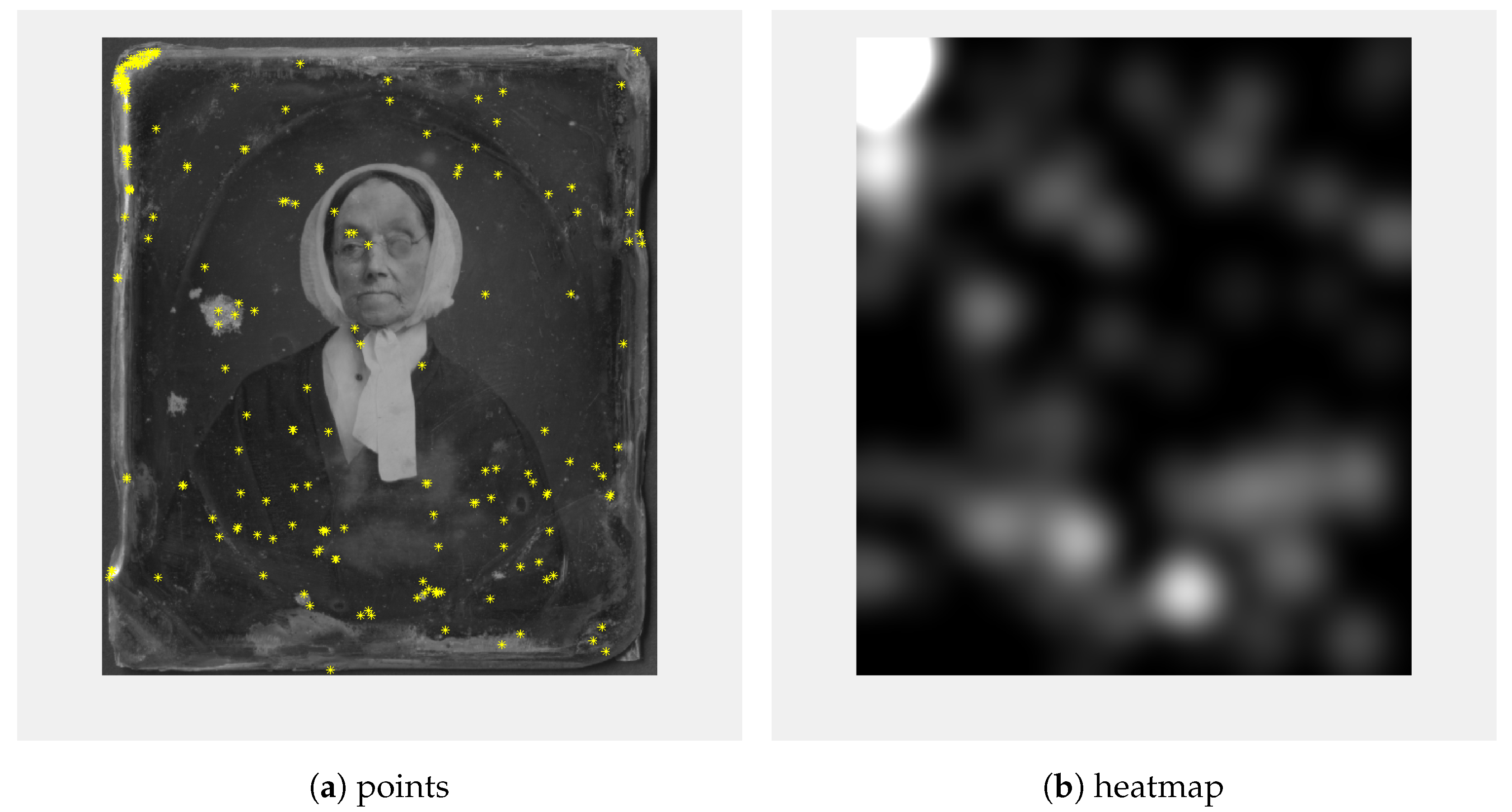
As feature detectors, we used co-SIFT and Harris corner detectors [
18]; 200 Harris corners were calculated (
Figure 5a) and a heatmap (
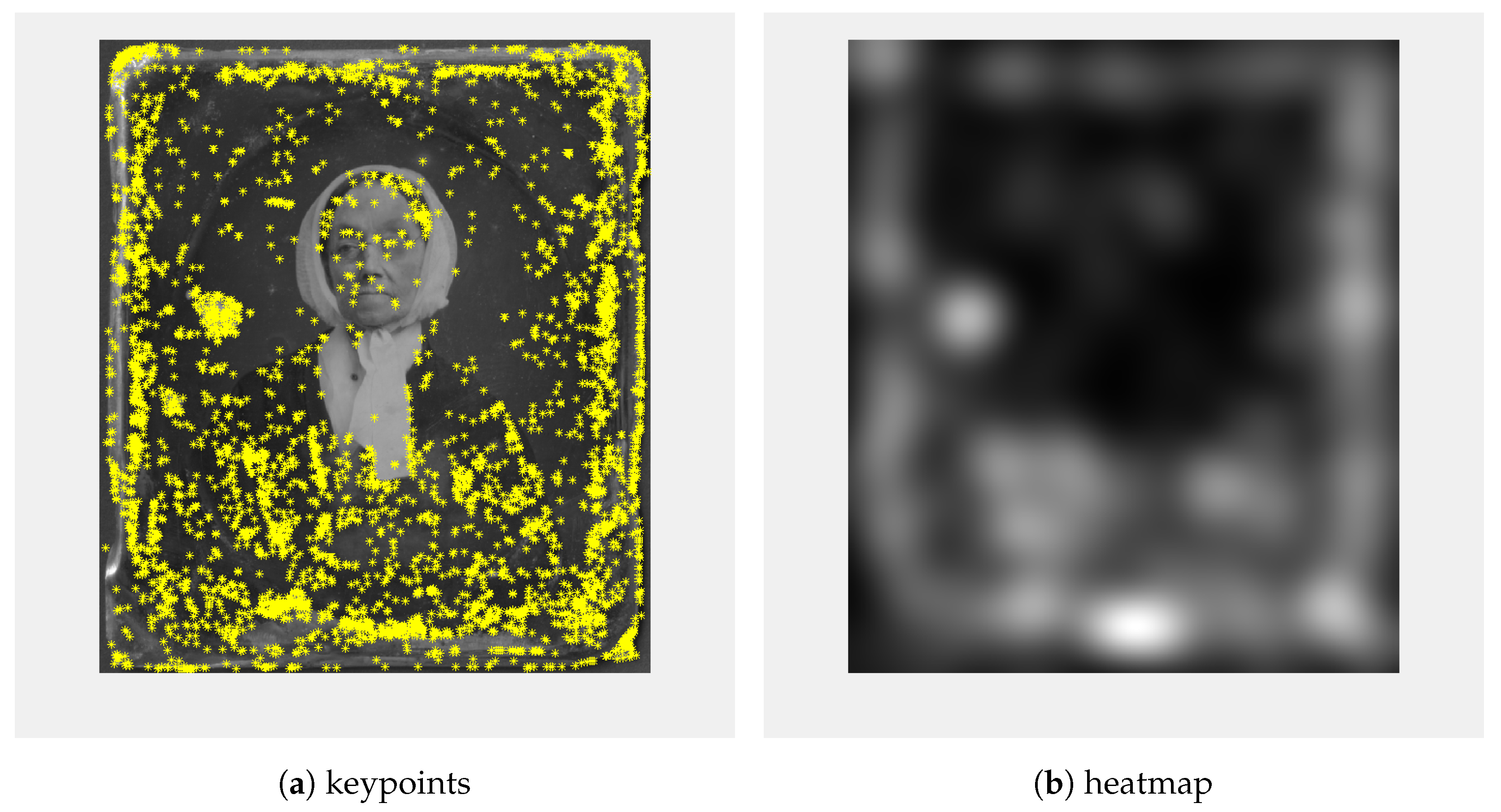
Figure 5b) was created so that for every point a circle blurred with Gaussian blur was added. Similar to the keypoints calculated using Co-SIFT (
Figure 6a), the heatmap (
Figure 6b) was created.
The number of co-SIFT features, resp. keypoints for input images varied from 4 to 5143.
3. Manual Focus of the Push Broom-like Scanners
Scanners with lenses that capture images in a similar way to cameras do not always have autofocus capability. If we want the resulting scanned image to be sharp enough, we need to know the height of the object to be scanned and make sure that the optical system is well-adjusted and calibrated. Since it is not always easy to meet both conditions, scanners often provide a manual focusing option that uses one of the image sharpness functions mentioned later in this paper.
The sharpness function calculates the sharpness measure or degree of sharpness using the pixel values of the captured image. The value of the sharpness function varies depending on the distance of the lens from the image sensor. The distance of the lens from the sensor is provided by a precision stepper motor, which searches for the position at which the image captured by the sensor is the sharpest. A suitable sharpness function should meet at least the following criteria [
36]:
Unimodality—the sharpness function contains one significant extreme;
Accuracy—the maximal sharpness is at the extreme of the function;
Monotonicity—the sharpness function is monotonic at a sufficient distance from the extreme.
There are many sharpness functions. According to [
37,
38], they can be divided into functions using differences, image convolution, Fourier transform, image entropy, and others. All sharpness functions exploit the fact that details in an image are more visible when the image is sharper.
When looking for an extreme, due to oscillations (rapid changes) of the sharpness function, it is possible to use smoothing of the function, e.g., using a moving average [
39]. Since a color image usually consists of three color components
R,
G,
B, it is necessary to either convert the image to grayscale or calculate the sharpness function for only one color component [
40].
In this section, we will consider the image of size M × N as a 2D function , for and . The values are the spatial coordinates and the value of at any point denotes the intensity at that point (pixel).
3.1. Sharpness Functions Based on Differences
These functions compute a measure of sharpness using the sum of the differences of the values of adjacent pixels in either the horizontal or vertical direction, or in both directions simultaneously [
36,
37,
38,
40]
In general, the difference between more than two rows or columns can also be used, which partially eliminates the sensitivity of these measures to noise in the image [
36]. The value of
k is usually chosen as 1 or 2, but [
36] states that a higher value can be used.
3.2. Sharpness Functions Based on Image Convolution
These sharpness functions use image filters that highlight edges in the image at an appropriately chosen threshold
T [
36,
37,
38,
39,
40].
The resulting sharpness function is computed using the convolution operator “∗” of the image function
with the given convolution function
Of the relatively large number of sharpness functions using convolution, the following are the most used:
where
,
and
3.3. Sharpness Functions Based on Fourier Transform
Sharpness functions using the Fourier transform are computationally intensive but are sufficiently robust to the moderate noise in the image coming from image sensors. These functions require that the image be first transformed into the frequency domain using a discrete Fourier transform (DFT) [
36,
38,
40,
41] or a discrete cosine transform (DCT) [
42]. In a sharp image, the higher frequency values are larger, in an unfocused image they are smaller. Similarly, the values at lower frequencies are larger for an unfocused image and smaller for a focused image [
41]. To define sharpness functions, it is often convenient to use only a certain frequency interval
[
36].
The discrete Fourier transform
of the image function
is expressed using the formula
but to calculate the sharpness function we use a formula in which the DFT is written using the real and imaginary components
Based on the previous formula, we calculate the sharpness function using one of the following formulas
where
,
.
3.4. Experiments with Manual Focusing
For use in photography, sharpness measures based on differences and measures based on image convolution are the most suitable, according to [
37,
38]. Sharpness functions based on the Fourier transform are sufficiently robust not only to the surface texture of the captured object and different lighting conditions but also to noise in the image [
41,
42]. However, their accuracy is slightly worse than that of the previously mentioned methods.
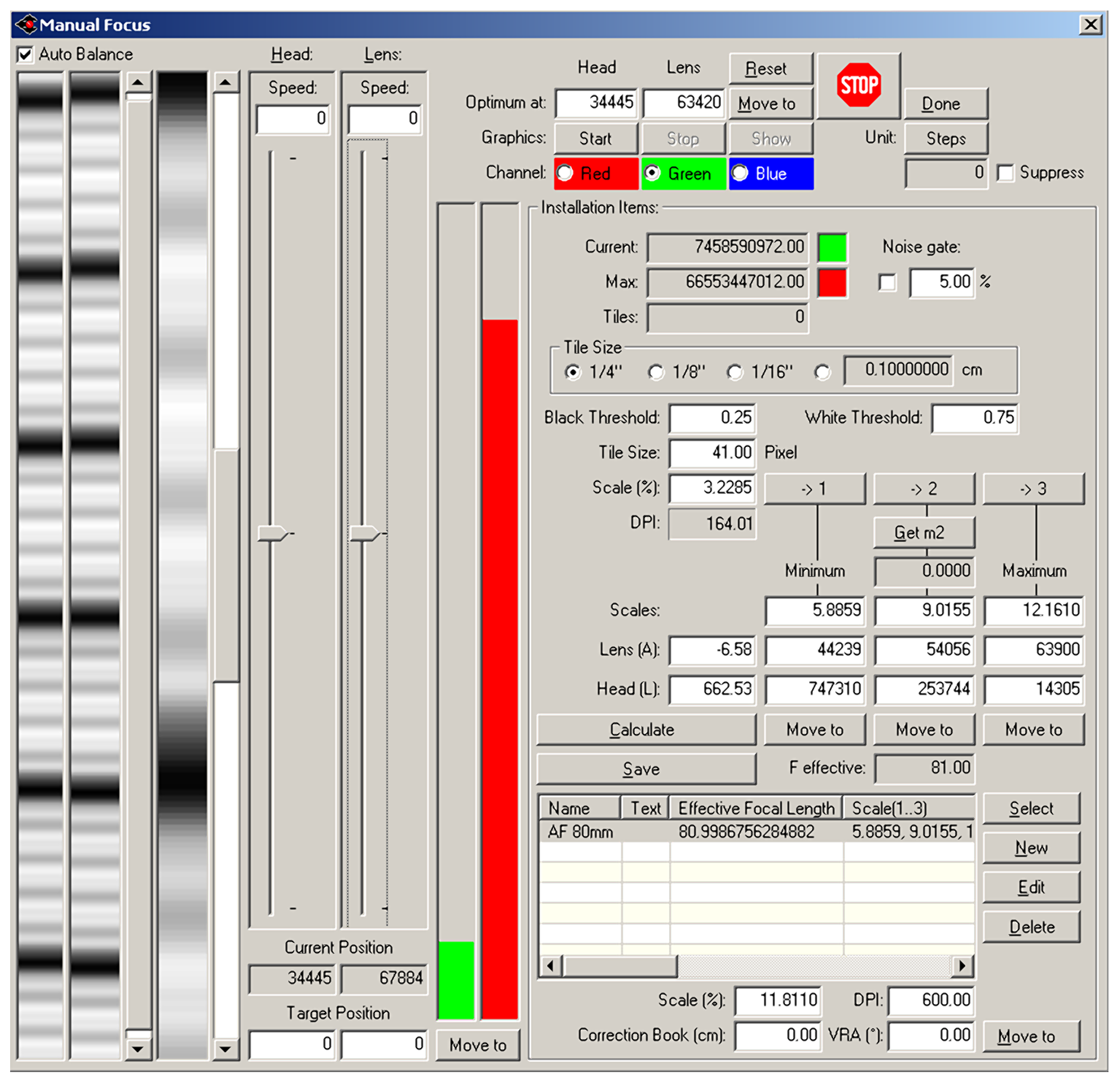
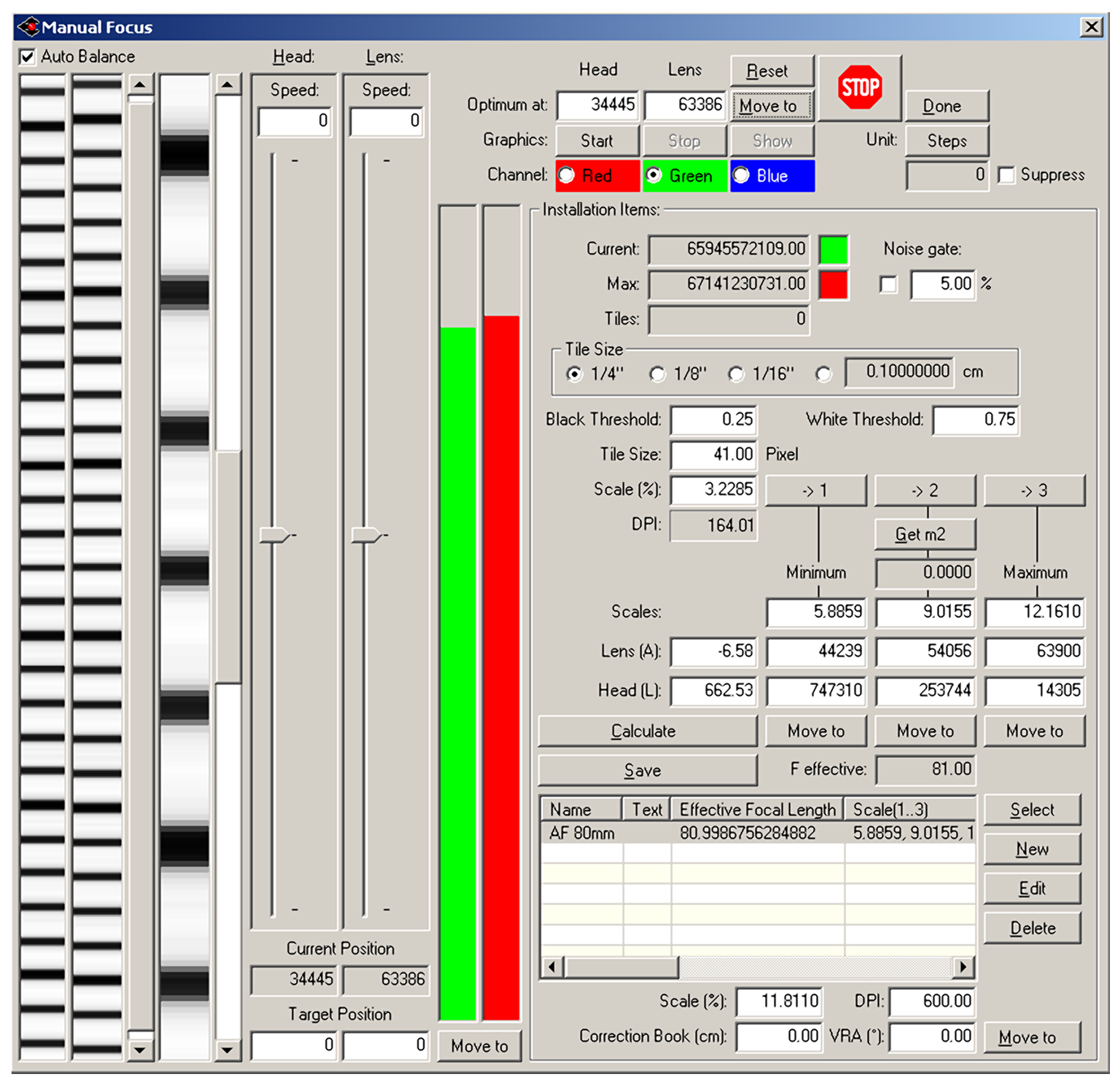
The Cruse scanner uses one of the above-mentioned sharpness functions for manual focusing. It has an advanced interface for manual focusing, which can be seen in
Figure 7 and
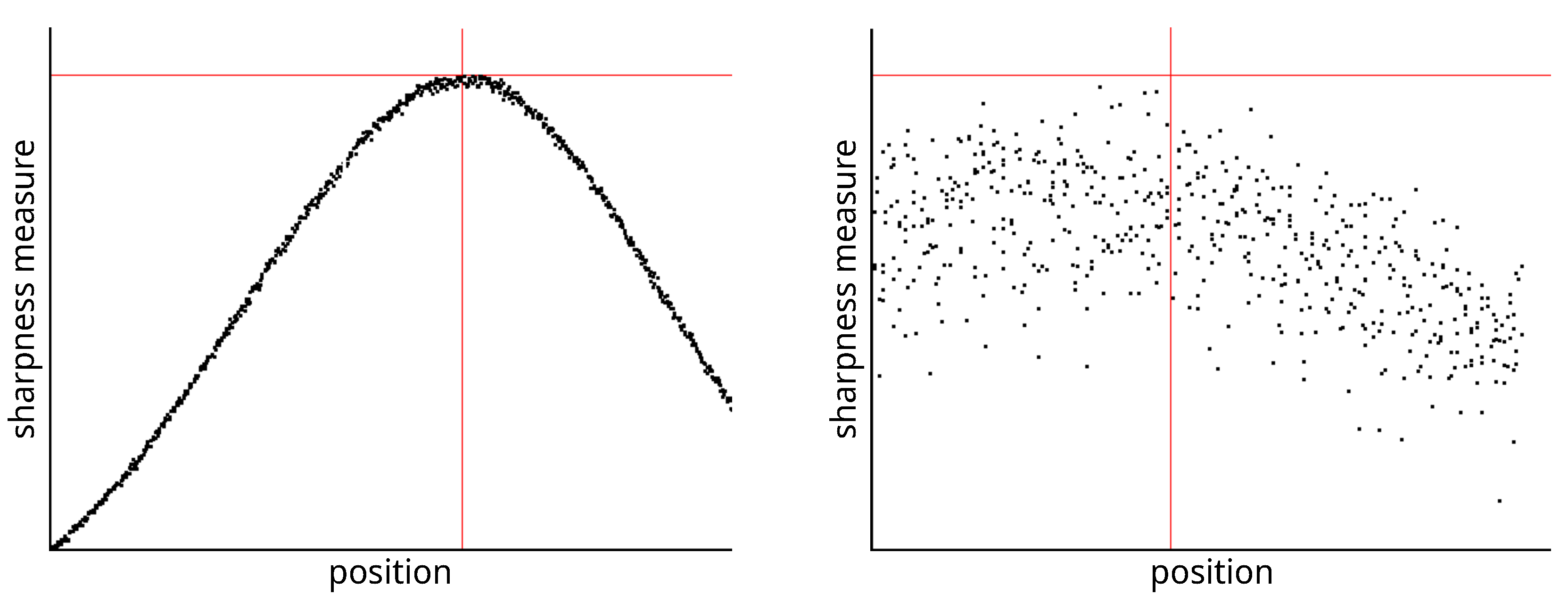
Figure 8. In this interface, it is possible to change the distance of the lens from the sensor (current position) by adjusting the speed of the stepper motor (lens speed) that moves the lens or the entire sensor head (head speed). We selected the green color channel to calculate the sharpness function. We set the minimum threshold (black threshold) to 0.25 and the maximum (white threshold) to 0.75. The scanner control algorithm then calculated the sharpness measure (installation items—current) for the current moving lens position and continuously displayed the calculated maximum value (installation items—max). After verifying the maximum value using the graph of sharpness function (see
Figure 9), we set the scanning head and lens to the position (Optimum At:) where the sharpness function had the largest value.
A magnified picture of one column of the unfocused scanned image can be seen in
Figure 7, and a picture of the focused image can be seen in
Figure 8. The sharpened image has larger sharpness values, which are manifested by a distinct and clearly delineated alternation of dark and light bands.
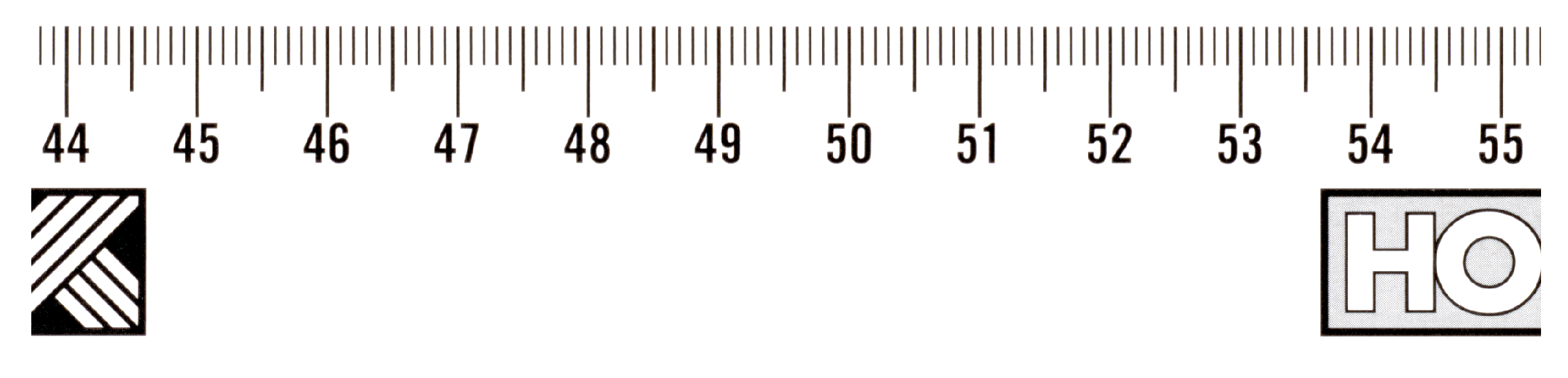
We verified the manual focusing procedure by scanning on an inaccurately calibrated scanner on multiple objects and at different resolutions. One of them was a black and white ruler (see
Figure 10) with height
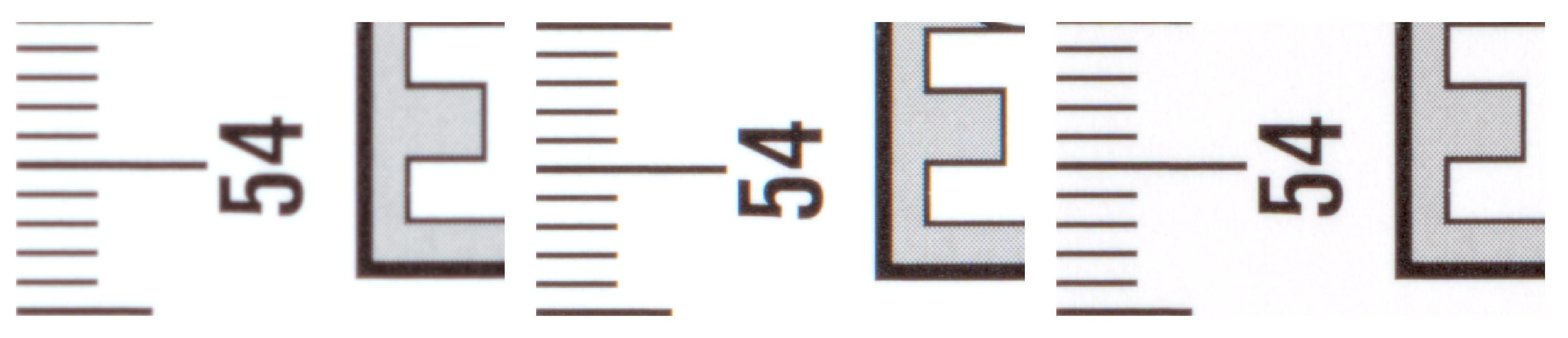
cm, for which we used a scanner resolution of 600 ppi. The 4× magnified cutout (see
Figure 11 left) shows a poorly focused image. The scanner makes it possible to obtain a sharper image by setting a different height than the actual height of the object being scanned, but at the cost of increased chromatic aberration (see
Figure 11 in the middle). After manual sharpening using the sharpness function
, we obtained a significantly sharper image without chromatic aberration (see
Figure 11 right).
The CRUSE Synchron Table scanner makes it possible to manually focus the image even in the case of insufficient calibration or incorrectly estimated height of the scanned object with complex relief. For this purpose, it uses a fairly robust sharpness function based on the aforementioned list of sharpness functions.
4. Comparison of Images Captured in Different Scan Modes of the CRUSE Synchron Table Scanner
As we mentioned earlier, the CRUSE Synchron Table scanner has many lighting modes to choose from. Our goal was to compare different lighting modes and select one that captures the small surface damage of the scanned objects sufficiently well. Thanks to its design, the scanner allows us to scan objects that are not completely flat with sufficient sharpness. This is made possible because when scanning with a resolution of 600 ppi, the depth of field is around 1.0 cm, and at a lower resolution, it is even slightly larger.
Several methods can be used to compare the similarity of the two images. The simplest of them, such as MSE, RMSE, and similar ones, use well-known statistical measures such as the mean squared error, mean absolute error, mean relative error, and the standard deviation or correlation. We could not use simple statistical measures when comparing images, since different lighting modes produce images not only with different average pixel intensities but sometimes with different colors as well. This is most evident when scanning glossy surfaces. Useful measures could be UIQI (universal image quality index), SSIM (structural similarity index measure) and its variations, image entropy value, or histogram comparison, as shown by other authors when comparing two images [
43]. It is also possible to use other, less well-known, measures based on spectral distance or the human visual system (HVS) [
44]. In our comparison, we did not have to take into account measures that compare images of different sizes or images that are scanned with a different rotation.
Before comparison, we converted all evaluated images into 8-bit grayscale images with sRGB color profile. To convert from a color image to a grayscale image, we used the Equation (
1) that takes into account the human perception of color intensity [
45].
In the following text, we compare two equal-sized grayscale images and of size , with pixel intensities from 0 to 255, for and .
The simple differences in the image pixels generally do not give good results, so we used other measures to compare the two images.
4.1. Universal Image Quality Index
The first measure we used to compare two images was the Wang and Bovik UIQI measure [
46], which uses common image measures, such as mean and standard deviation. This measure simultaneously compares the structural distortion (correlation loss)
luminance distortion
and contrast distortion
in the resulting formula for calculating the similarity index of the two compared images
where
,
are the average pixel values of the first and second image,
and
are standard deviations for the first and second image, and finally
is the covariance of both images.
4.2. Structural Similarity Index Measure
The second measure we used was Wang et al. [
47,
48] SSIM measure, which is derived from UIQI by adding stabilization constants
to the structural distortion
luminance distortion
and contrast distortion
which also serves as a tolerance factor for the comparison.
In the formula for SSIM, the powers of alpha, beta, and gamma for the above functions are also used:
For easier calculation of the SSIM formula, Wang et al. calculated the last constant as
and they chose
. Since the constants
depend on the given range
L of pixel intensities of the compared images, they are calculated from the formula
,
, where
. After setting these constants, we calculate the similarity measure of the two images using the formula:
In practice, it is more convenient to compare two images not globally (all at once), but locally [
48], in separate pieces using a suitably chosen sliding window, which gradually passes through all the pixels
of the compared images
I and
J.
To calculate the average intensity
of pixel
and
of pixel
in a window of size
with weights
, we used the formulas
and
For the standard deviation, we used the formulas
and
Finally, for the covariance, we used the formula
The weights
were calculated using the Gaussian function
The weights chosen in this way ensure that the local values of neighboring pixels do not change abruptly.
The resulting
measure is then calculated as the standard mean of local
values:
In our experiments, we used
,
,
, window size
and
to calculate the similarity of the two images. Compared to the recommended value of
, in the work of Wang et al. [
47], we chose a much higher value of
to disregard very small structural changes, such as dust grains or very small scratches, in the comparisons. The smaller window size and smaller
value (compared to the standard values in Wang et al.) provided finer details of the drawing on the displayed SSIM difference map.
4.3. Edge Strength Similarity Image Quality Metrics
The third measure we used to compare images scanned in different light modes was the ESSIM (edge strength similarity image quality metrics) by Zhang et al. [
49]. This measure exploits the fact that the most significant features of an image are the boundaries (edges) of objects. The authors used Scharr’s gradient operator (filter), which they modified to detect not only horizontal and vertical edges but also diagonal edges.
Zhang et al. [
49] used the directional derivative of
in pixel
for direction
and define the edge “strength” in the diagonal up (
) and diagonal down directions (
):
then the edge strength for the horizontal direction (
) and the vertical direction (
)
where
p is a suitable scaling parameter that affects the edge strength.
Since the human visual system is sensitive to the direction of the edge that is more intense, Zhang et al. [
49] define the total edge strength for pixel
in the image
ITo keep the selected directions in a given pixel the same (consistent) for both compared images, the total edge strength for the second compared image
J is defined by the formula:
To compute the directional derivative of
, we use the convolution of the image function
with the function
(see Equation (
2)) that highlights the edges. The matrices of the convolution functions
for each direction
are as follows:
The resulting value (index) of the similarity of the two images is expressed by the formula
Parameter
C has a similar role to the SSIM measure and Zhang et al. [
49] proposed to calculate it from the formula
, where
B is a predefined constant and
L is range of pixel intensities of the compared images. For the standard 8-bit grayscale images is
.
In our experiments, we used the same values as suggested by the authors, i.e., and because these constants gave sufficiently good results.
4.4. Index Maps
The UIQI, SSIM, and ESSIM measures make it possible to visualize the differences between the compared images using so-called index (difference) maps. These difference maps are calculated from the local index values for each pixel
, similar to the SSIM case where the local indices were
. For better visualization, we added the power
in the difference map values for SSIM and ESSIM indices
In our case, we chose for SSIM and for ESSIM. The UIQI measure did not provide good results, so we did not calculate difference maps for it.
4.5. Image Entropy
The last measure that we used in our calculations to compare the two images was the entropy of the image. The image entropy uses the histogram
, which is calculated from the pixel intensity values of the grayscale image and is expressed by the formula
By calculating the image entropy for all scanning modes (see
Table 1,
Table 2,
Table 3,
Table 4,
Table 5 and
Table 6) of the three scanned objects, we found that the
LLa scanning mode provides the “most information” in the image. The scan mode that would provide the lowest image entropy for all three scanned objects was not clearly determined. Therefore, we decided to use
LRFB as a reference (ground truth) scanning mode, which excels in sufficiently homogeneous illumination of the entire scanned area of the object from all sides. In our experiments, we further compared all scan modes with the selected
LRFB mode. Because the results of the 15-degree tilt scan were significantly different from the standard no-tilt scan, we divided the comparisons into two groups.
4.6. Difference Image and Edge Accentuation
At the end of the experiment, we attempted to visualize the differences between the
LRFB reference scan mode and the other modes to see how the individual images scanned in the different modes differed. The simplest way was to create a difference image using ordinary difference
The difference images did not have enough contrast, so we adjusted them by rescaling the intensity
where
and
. We then reduced the gamma value from 1.0 to 0.5 and inverted the intensities of the adjusted difference image.
Since the
LLa scanning mode provided images with the largest difference and entropy compared to the
LRFB reference mode (see tables below), we decided to highlight the edges directly in the scanned images to see if, in addition to the edges of the objects, damaged parts (scratches, pinholes, cavities, etc.) would also be visible in the image. In this case, any available edge filter (Sobel, Canny, Prewitt, Roberts, Laplace, etc.) could be used, but we chose the simplest Roberts edge detector. We modified this procedure slightly by using a coefficient of
to make the edges more visible. We applied the convolution function
to the image function
and have
where
and
5. Results
In this section, we present the results we obtained by comparing images scanned in different scanning modes with images scanned in the LRFB reference mode. We used the UIQI, SSIM, and ESSIM measures described earlier. For each image, we also calculated the image entropy.
The results presented in the
Table 1,
Table 2,
Table 3,
Table 4,
Table 5 and
Table 6 show that
LLa lighting mode generally provides the lowest similarity to
LRFB lighting mode and has the highest image entropy. Values in bold indicate the lowest similarity to the image scanned in
LRFB reference mode or the highest image entropy. Underlined values indicate the second-lowest similarity to the image scanned in
LRFB reference mode or the second-highest image entropy. The largest entropy value in an image means that the image contains the most image information. This means that the surface damage of scanned objects is more visible in the
LLa lighting mode than in the
LRFB or other lighting modes. We can say that the shadows “added” by
LLa mode are quite significant even when scanning flat objects. This information, together with difference images and difference maps, helps restorers locate damaged parts and determine the extent of surface damage to scanned objects. In conclusion, we can say that the
LLa lighting mode is the best of all lighting modes when it is necessary to capture even minor damage to scanned objects.
6. Qualitative Evaluation of Selected Scans
Within this section, we cite the human expertise of experienced restoration professionals. They are responsible for the initial selection of three hard-to-photograph originals, the creation of the above-cited Europeana-style metadata, and the selection of the below commented DAG, AMB, and TIN scans or their processed versions in PNG image format. There are two levels of observation. First, the quality of the scan itself is for documentation and presentation. Second, the visual damage serves educational and possibly future restoration purposes.
6.1. Ambrotype
The grayscale image of ambrotype scanned with
LRFB mode (see
Figure 12 left): black and white flattened image of the hand-colored ambrotype allows us to look at the image as a whole without being disturbed by the coloring and the three-dimensionality of the image and glass surface. By viewing this image, we can focus more on the composition and tonality of the ambrotype.
The difference image of the
LRFB vs.
LLa scan mode (see
Figure 14 left): does not give us much information needed for the correct identification or conservation treatment.
The SSIM map (see
Figure 14 middle–left): does not give us much information needed for the correct identification or conservation treatment.
The ESSIM map (see
Figure 14 middle–right): does not give us much information needed for the correct identification or conservation treatment.
The image of filtered edges of the picture scanned in
LLa mode (see
Figure 14 right): in this case, this type of rendering is useful mainly for showing the deterioration of the background of the image in form of little dots.
6.2. Daguerreotype
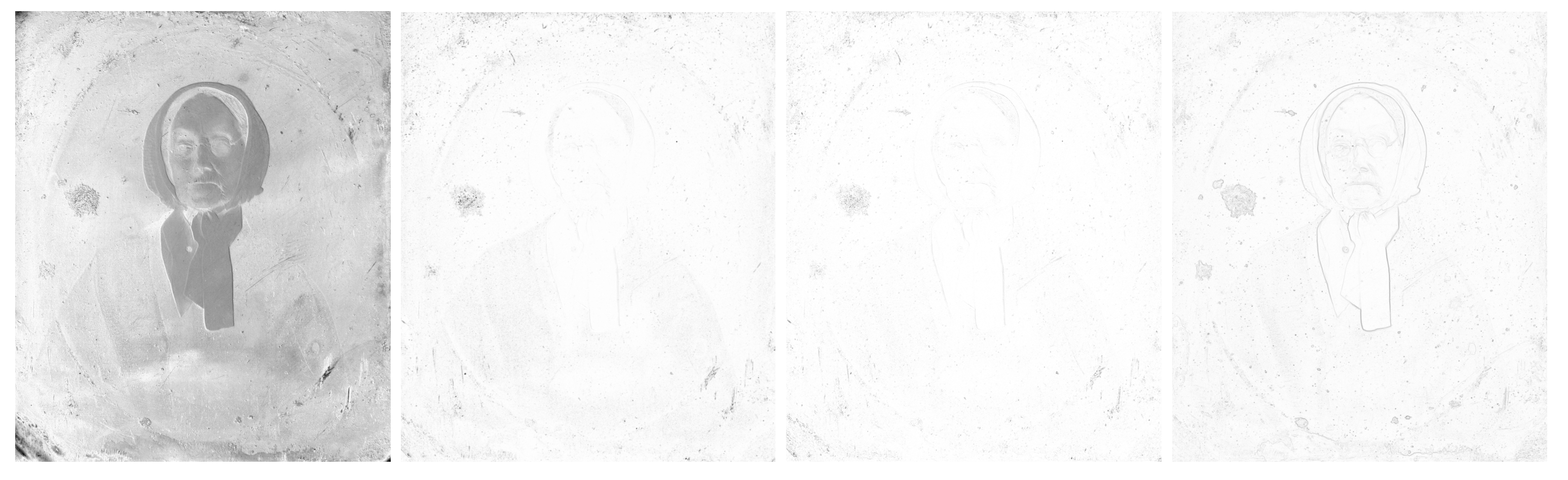
The grayscale image of daguerreotype scanned with
LRFB mode (see
Figure 12 middle): The difference image of the
LRFB vs.
LLa scan mode (see
Figure 15 left): emphasize the imperfection of the daguerreotype (the plate) such as abrasions, scratches gouges, and corrosion.
The SSIM map (see
Figure 15 middle–left): does not give us much information needed for the correct identification or conservation treatment.
The ESSIM map (see
Figure 15 middle-right): does not give us much information needed for the correct identification or conservation treatment.
The image of filtered edges of the picture scanned in
LLa mode (see
Figure 15 right): all imperfections are here even more detailed visualized than on the
Figure 15 left. It is hard to tell though if there are only imperfections of the daguerreotype plate showing here or also the small surface particles such as dust. This could be a little misleading at the end.
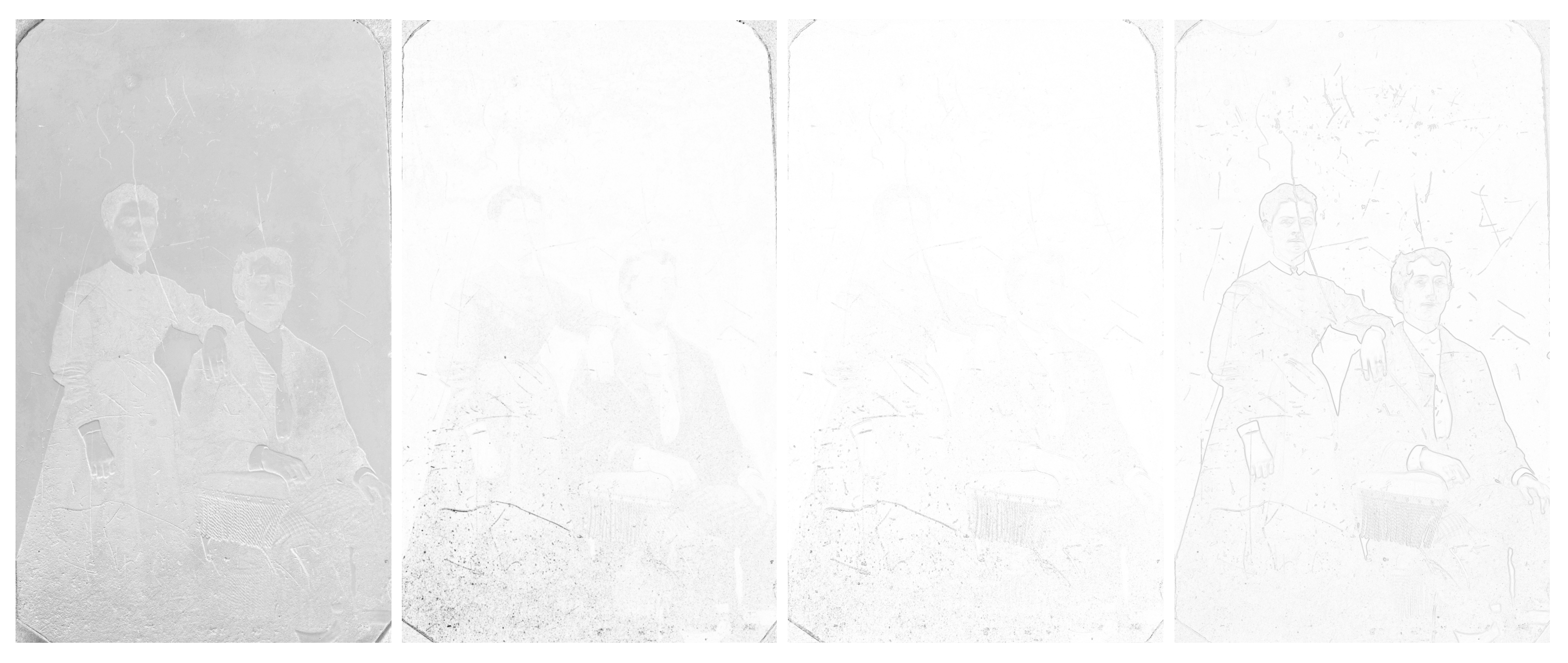
6.3. Tintype
The grayscale image of the tintype scanned with
LRFB mode (see
Figure 12 right): in the case of tintype, this rendering is not so much different from the original scan.
The difference image of the
LRFB vs.
LLa scan mode (see
Figure 16 left): does not give us much information needed for the correct identification or conservation treatment.
The SSIM map (see
Figure 16 middle–left): does not give us much information needed for the correct identification or conservation treatment.
The ESSIM map (see
Figure 16 middle–right): does not give us much information needed for the correct identification or conservation treatment.
The image of filtered edges of the picture scanned in
LLa mode (see
Figure 16 right): this image is very helpful for determining the exact number of scratches in form of lines. It also shows the minor scratches on the photographs that otherwise might not be detected with the naked eye. Very helpful rendering in this case.
One can conclude that qualitative judgment offers support for rendering differences in addition to the primary look of a given digital twin of a cultural object. Moreover, there are indications for future research and the utility of tested methods for restoration practice.
7. Discussion
In general, we are aware of three types of uncertainty: vagueness (fuzziness), non-specificity, and controversy (strife). They cause certain experiences with scanning natural or cultural heritage items. In [
22], we report on the missing data, limitations of sharpening or scanner precision, and lack of expertise when scanning such unusual originals, such as rare handmade papers for creative use in achieving real-media effects, resp., “ultra-realistic papers, canvases, and lithography stones developed in cooperation with academic professionals” [
50]. The non-specificity of describing the original can be improved by clarifying metadata with respect to Europeana requirements or even to the international metadata standard CIDOC-CRM. The most challenging uncertainty seems to be the controversy. It is caused by multiple ground truths. Our InfoVis differentiation may help to support the decision-making in the time of scanning, and increase the accessibility of certain intuition for beginners or students, but this sort of machine perception does not suffice for restoration experts.
Our results can be seen in methodology, original problem statement, and workflow design. In particular, we contributed to the study of image formation with manual focusing enabled by CRUSE technology and postprocessing inspired by image quality methods and machine perception (feature points, novel coSIFT, evaluating SSIM, saliency, and other image quality properties). Last but not least, we confronted the automated processing with the perceptual experiment in the eye-tracking case study. Combining CRUSE scans with eye-tracking evaluation seems to be novel and not available in the given literature. The meaning of our approach can either influence the deeper study of already scanned and published images or even help to propose better or faster procedures in future digitization.
8. Conclusions
Our novel workflow for relatively systematic documenting of rare cultural objects can be characterized as a virtual museum creation. First, we chose the globally unique primary dataset of cultural objects. Second, we produced the secondary digital dataset. Third, we designed the scenarios for the presentation of their properties and comparisons. Fourth, we planned and implemented the integrated hardware and software solution. Fifth, we designed the scenarios for presentation, e.g., the web page [
9] or this paper. Sixth, we integrated, verified, and tested our “virtual museum or exhibition”. Seventh, we publish and evaluate our findings, contribution, and data for target groups, resp. interests, including students at our faculties. As research on the CRUSE scanner properties is in its beginnings, we omitted previous work surveys, and except for the sharpening and coSIFT parts, we just mentioned relevant ideas at the appropriate places in the text. The sharpening or manual focusing, coSIFT, and scanning mode comparisons are systematic, but certain parts, such as heatmap comparisons are, obviously, in the proof-of-concept state.
Our experiments with image similarity and entropy measures, as well as evaluations by photo restoration experts, confirmed that among all lighting modes, LLa is the most advantageous. In some cases, differential images and differential maps are also useful, helping to visualize even very subtle surface deterioration that is not visible at first glance.
Our methodological and practical contributions imply several future research avenues (e.g., precision, perception, presentation, statistic evaluation, and appropriate visualization), which we support via the published dataset [
9] under CC BY-NC 4.0 license.
Author Contributions
Conceptualization, Z.B.H. and J.B.K.; methodology, R.B. and A.F.; software, Z.Č., P.Š. and R.B.; validation, J.B.K., J.H. and K.B.; formal analysis, R.B.; investigation, Z.Č. and P.Š. and R.B.; resources, J.B.K., J.H. and K.B.; data curation, R.B.; writing—original draft preparation, Z.B.H.; writing—review and editing, Z.B.H., Z.Č., P.Š., R.B., A.F., J.B.K., J.H. and K.B.; visualization, Z.Č. and P.Š. and R.B.; supervision, Z.B.H.; project administration, Z.Č.; funding acquisition, Z.B.H. All authors have read and agreed to the published version of the manuscript.
Funding
The CRUSE scanner was funded by Comeniana grant no. ITMS 26240220077 (OPVaV-2011/4.2/07-SORO). The Tobii Pro Glasses was funded under the Operational Program Integrated Infrastructure for the project: Advancing University Capacity and Competence in Research, Development, and Innovation (ACCORD), co-financed by the European Regional Development Fund.
Institutional Review Board Statement
Not Applicable.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the eye-tracking study.
Data Availability Statement
The data supporting the reported results can be found at [
9], available under the CC BY-NC 4.0 license.
Acknowledgments
This publication is the result of support under the Operational Program Integrated Infrastructure for the project: Advancing University Capacity and Competence in Research, Development and Innovation (ACCORD), co-financed by the European Regional Development Fund. The Cruse scanner was supported by Comeniana, grant no. ITMS 26240220077 (OPVaV-2011/4.2/07-SORO) in cooperation with EDICO SK and Comenius University. We thank the owners of the originals used. Finally, we express our gratitude to the anonymous reviewers for the ideas on how to improve the written presentation.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AFAD | Academy of Fine Arts and Design |
| GAN | generative adversarial network |
| RNG | relative neighborhood graph |
| MST | Minimum Spanning Tree |
| AMB | ambrotypes |
| DAG | daguerreotypes |
| TIN | tintypes |
| DT | Delaunay triangulation |
| SIFT | stop, investigate, find, and trace |
| DFT | discrete Fourier transform |
| DCT | discrete cosine transform |
| PPI | pixels per inch |
| HVS | human visual system |
| MSE | mean square error |
| RMSE | root mean square error |
| UIQI | universal image quality index |
| SSIM | structural similarity index measure |
| ESSIM | edge strength similarity image quality metrics |
Appendix A
Figure A1.
Images of ambrotypes scanned with different light modes. From left to right: LRFB, LR, LFB, LF, LTx, LTx 5cm, LTx 10cm, RTx, RTx 5cm, RTx 10cm, LLa, LRFB 15deg, LR 15deg, LFB 15deg, LF 15deg, L 15deg.
Figure A1.
Images of ambrotypes scanned with different light modes. From left to right: LRFB, LR, LFB, LF, LTx, LTx 5cm, LTx 10cm, RTx, RTx 5cm, RTx 10cm, LLa, LRFB 15deg, LR 15deg, LFB 15deg, LF 15deg, L 15deg.
Figure A2.
Images of daguerreotypes scanned with different light modes. From left to right: LRFB, LR, LFB, LF, LTx, LTx 5cm, LTx 10cm, RTx, RTx 5cm, RTx 10cm, LLa, LRFB 15deg, LR 15deg, LFB 15deg, LF 15deg, L 15deg.
Figure A2.
Images of daguerreotypes scanned with different light modes. From left to right: LRFB, LR, LFB, LF, LTx, LTx 5cm, LTx 10cm, RTx, RTx 5cm, RTx 10cm, LLa, LRFB 15deg, LR 15deg, LFB 15deg, LF 15deg, L 15deg.
Figure A3.
Images of tintypes scanned with different light modes. From left to right: LRFB, LR, LFB, LF, LTx, LTx 5cm, LTx 10cm, RTx, RTx 5cm, RTx 10cm, LLa, LRFB 15deg, LR 15deg, LFB 15deg, LF 15deg, L 15deg.
Figure A3.
Images of tintypes scanned with different light modes. From left to right: LRFB, LR, LFB, LF, LTx, LTx 5cm, LTx 10cm, RTx, RTx 5cm, RTx 10cm, LLa, LRFB 15deg, LR 15deg, LFB 15deg, LF 15deg, L 15deg.
References
- Bee, R. The importance of preserving paper-based artifacts in a digital age. Libr. Q. 2008, 78, 179–194. [Google Scholar] [CrossRef]
- Google Arts and Culture. Available online: https://artsandculture.google.com/ (accessed on 19 December 2022).
- Europeana. Available online: https://www.europeana.eu/sk (accessed on 19 December 2022).
- Digital Museums Canada. Available online: https://www.digitalmuseums.ca/ (accessed on 19 December 2022).
- Wikipedia: GLAM. Available online: https://en.wikipedia.org/wiki/Wikipedia:GLAM (accessed on 19 December 2022).
- Slovakiana. Available online: https://www.slovakiana.sk/ (accessed on 19 December 2022).
- Hojstričová, J. Renesancia Fotografie 19. Storočia; VSVU: Bratislava, Slovakia, 2014. [Google Scholar]
- Wan, Z.; Zhang, B.; Chen, D.; Zhang, P.; Chen, D.; Wen, F.; Liao, J. Old photo restoration via deep latent space translation. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 2071–2087. [Google Scholar] [CrossRef] [PubMed]
- CRUSE Scans of Ambrotype, Daguerrotype and Tintype. Available online: https://flurry.dg.fmph.uniba.sk/scans (accessed on 30 December 2022).
- Albright, G.; Barger, M.S.; Baas, V.; Daffner, L.A.; Derby, D.; Edmondson, T.; Fischer, M.; Foster, C.; Gilliland, L.; Hunter, M.L., Jr.; et al. Cased photographs including daguerreotypes, ambrotypes and tintypes (Chapter 2). In Photographic Materials Conservation Catalog American Institute for Conservation of Historic and Artistic Works (AIC); Photographic Materials Specialty Group (PMG): Washington, DC, USA, 1997. [Google Scholar]
- Chen, J. A Photodocumentation Method: Taking the Negative Image of a Daguerreotype. 2003; Unpublished Report. [Google Scholar]
- Daniel, M. Daguerre (1787–1851) and the Invention of Photography. Available online: https://www.metmuseum.org/toah/hd/dagu/hd_dagu.htm (accessed on 19 December 2022).
- Institute, I.P. Graphic Atlas, Ambrotype. Available online: http://www.graphicsatlas.org/identification/?process_id=283 (accessed on 19 December 2022).
- Lavédrine, B.; Frizot, M.; Gandolfo, J.P.; Monod, S. Photographs of the Past: Process and Preservation; Getty Publications: Los Angeles, CA, USA, 2009. [Google Scholar]
- Blaško-Križanová, J. Laboratory of Restoration of Photography. Available online: https://www.vsvu.sk/en/departments/department-of-conservation-and-restoration/laboratory-of-photography-restoration/ (accessed on 19 December 2022).
- Hartley, R.I.; Gupta, R. Linear Pushbroom Cameras. In Lecture Notes in Computer Science, Proceedings of the Computer Vision-ECCV’94, Third European Conference on Computer Vision, Stockholm, Sweden, 2–6 May 1994; Volume I; Eklundh, J., Ed.; Springer: Berlin/Heidelberg, Germany, 1994; Volume 800, pp. 555–566. [Google Scholar] [CrossRef]
- Chi, E. A taxonomy of visualization techniques using the data state reference model. In Proceedings of the IEEE Symposium on Information Visualization 2000, INFOVIS 2000, Salt Lake City, UT, USA, 9–10 October 2000; pp. 69–75. [Google Scholar] [CrossRef]
- Harris, C.G.; Stephens, M. A combined corner and edge detector. In Proceedings of the 4th Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 23.1–23.6. [Google Scholar]
- Stancelova, P.; Cernekova, Z.; Ferko, A. Novel Co-SIFT Detector for Scanned Images Differentiation. In Proceedings of the International Conference on Computer Vision and Graphics 2022; Springer Nature: Cham, Switzerland, 2023; pp. 85–98, ISBN 978-3-031-22025-8. [Google Scholar]
- CRUSE Spezialmaschinen GmbH. Cruse Software CSx 3.9 Manual 2018; CRUSE Spezialmaschinen GmbH: Wachtberg, Germany, 2018. [Google Scholar]
- Cerneková, Z.; Berger Haladová, Z.; Blaško Križanová, J.; Hojstričová, J.; Bohdal, R.; Ferko, A.; Zabadal, L. “Hungarian” Image (Differencing) Descriptor. In Proceedings of the DSAI 2022: International Conference on Software Development and Technologies for Enhancing Accessibility and Fighting Info-exclusion, NOVA-IMS, Lisboa, Portugal, 31 August–2 September 2022; ACM: New York, NY, USA, 2022. [Google Scholar]
- Bohdal, R.; Ferko, A.; Fabián, M.; Bátorová, M.; Hrabovský, M.; Lúčan, L.; Zabadal, L. Adaptive Scanning of Diverse Heritage Originals like Synagogue Interior, Empty Rare Papers or Herbarium Items from the 19 th Century. In Proceedings of the 18th Conference on Applied Mathematics (APLIMAT 2019), Bratislava, Czech Republic, 5–7 February 2019; Curran Associates, Inc.: Red Hook, NY, USA, 2019; pp. 72–82. [Google Scholar]
- Polak, M.; Pecko, M.; Bohdal, R.; Ferko, A. Experimental 3D Shape Reconstruction from High-precision 2D CRUSE Scans Using Shadows and Focusing. In Proceedings of the 19th Conference on Applied Mathematics (APLIMAT 2020), Bratislava, Slovakia, 4–6 February 2020; Curran Associates, Inc.: Red Hook, NY, USA, 2020; pp. 878–887. [Google Scholar]
- Toussaint, G.T. The relative neighbourhood graph of a finite planar set. Pattern Recognit. 1980, 12, 261–268. [Google Scholar] [CrossRef]
- Cao, Y. Hungarian Algorithm for Linear Assignment Problems (V2.3). MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/20652-hungarian-algorithm-for-linear-assignment-problems-v2-3 (accessed on 19 December 2022).
- Kuhn, H.W. The Hungarian Method for the Assignment Problem. In 50 Years of Integer Programming 1958-2008-From the Early Years to the State-of-the-Art; Jünger, M., Liebling, T.M., Naddef, D., Nemhauser, G.L., Pulleyblank, W.R., Reinelt, G., Rinaldi, G., Wolsey, L.A., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 29–47. [Google Scholar] [CrossRef]
- Budzakova, P.; Sikudova, E.; Berger Haladova, Z. Color object retrieval using local features based on opponent-process theory. In Proceedings of the International Conference on Computer Vision and Graphics, Warsaw, Poland, 17–19 September 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 275–286. [Google Scholar]
- Perko, R.; Ferko, A.; Bornik, A.; Cech, P. Beyond Image quality comparison. In Proceedings of the European Association for Computer Graphics-Eurographics, Granada, Spain, 1–5 September 2003; pp. 271–276. [Google Scholar]
- Tobii Connect. Available online: https://connect.tobii.com/ (accessed on 30 December 2022).
- Engel, S.; Zhang, X.; Wandell, B. Colour tuning in human visual cortex measured with functional magnetic resonance imaging. Nature 1997, 388, 68–71. [Google Scholar] [CrossRef] [PubMed]
- Thornton, J.E.; Pugh, E.N. Red/green color opponency at detection threshold. Science 1983, 219, 191–193. [Google Scholar] [CrossRef] [PubMed]
- Jost, T.; Ouerhani, N.; Von Wartburg, R.; Müri, R.; Hügli, H. Assessing the contribution of color in visual attention. Comput. Vis. Image Underst. 2005, 100, 107–123. [Google Scholar] [CrossRef]
- Anderson, M.; Motta, R.; Chandrasekar, S.; Stokes, M. Proposal for a standard default color space for the internet—sRGB. In Proceedings of the Color and Imaging Conference. Society for Imaging Science and Technology, Scottsdale, AZ, USA, 19–22 November 1996; Volume 1996, pp. 238–245. [Google Scholar]
- Swain, M.; Ballard, D. Color Indexing. Int. J. Comput. Vis. 1991, 7, 11–32. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Batten, C.F. Autofocusing and Astigmatism Correction in the Scanning Electron Microscope. Mphill Thesis, University of Cambridge, Cambridge, UK, 2000. [Google Scholar]
- Mir, H.; Xu, P.; Van Beek, P. An extensive empirical evaluation of focus measures for digital photography. In Proceedings of the Digital Photography X. SPIE, San Francisco, CA, USA, 2 February 2014; Volume 9023, pp. 167–177. [Google Scholar]
- Yao, Y.; Abidi, B.; Doggaz, N.; Abidi, M. Evaluation of sharpness measures and search algorithms for the auto-focusing of high-magnification images. In Proceedings of the Visual Information Processing XV. SPIE, Orlando (Kissimmee), FL, USA, 17 April 2006; Volume 6246, pp. 132–143. [Google Scholar]
- Pech-Pacheco, J.L.; Cristóbal, G.; Chamorro-Martinez, J.; Fernández-Valdivia, J. Diatom autofocusing in brightfield microscopy: A comparative study. In Proceedings of the 15th International Conference on Pattern Recognition. ICPR-2000, Barcelona, Spain, 3–8 September 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 3, pp. 314–317. [Google Scholar]
- Chern, N.N.K.; Neow, P.A.; Ang, M.H. Practical issues in pixel-based autofocusing for machine vision. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Republic of Korea, 21–26 May 2001; IEEE: Piscataway, NJ, USA, 2001; Volume 3, pp. 2791–2796. [Google Scholar]
- Kristan, M.; Pernus, F. Entropy based measure of camera focus. In Proceedings of the Thirteenth Electrotechnical and Computer Science Conference ERK, Portorož, Slovenia, 27–29 September 2004; Citeseer: Princeton, NJ, USA, 2004; pp. 179–182. [Google Scholar]
- Jeon, J.; Lee, J.; Paik, J. Robust focus measure for unsupervised auto-focusing based on optimum discrete cosine transform coefficients. IEEE Trans. Consum. Electron. 2011, 57, 1–5. [Google Scholar] [CrossRef]
- Aljanabi, M.A.; Hussain, Z.M.; Shnain, N.A.A.; Lu, S.F. Design of a hybrid measure for image similarity: A statistical, algebraic, and information-theoretic approach. Eur. J. Remote Sens. 2019, 52, 2–15. [Google Scholar] [CrossRef]
- Mahamud, S.T.; Rahmatullah, B. Image quality assessment based on properties of HVS and principle of image structure. In Proceedings of the 2015 International Conference on Image and Vision Computing New Zealand (IVCNZ), Auckland, New Zealand, 23–24 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–6. [Google Scholar]
- Ware, C. Information Visualization: Perception for Design; Morgan Kaufmann: Burlington, MA, USA, 2019. [Google Scholar]
- Wang, Z.; Bovik, A.C. A universal image quality index. IEEE Signal Process. Lett. 2002, 9, 81–84. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R. Structural similarity based image quality assessment. In Digital Video Image Quality and Perceptual Coding; CRC Press: Boca Raton, FL, USA, 2017; pp. 225–242. [Google Scholar]
- Zhang, X.; Feng, X.; Wang, W.; Xue, W. Edge strength similarity for image quality assessment. IEEE Signal Process. Lett. 2013, 20, 319–322. [Google Scholar] [CrossRef]
- Escape Motions. Available online: https://www.escapemotions.com/products/rebelle/papers.php (accessed on 19 December 2022).
Figure 1.
Image of the eye-tracking session at Comenius University. The participant, Zuzana Berger Haladová agrees with the publishing of her photo here. Photo by Zuzana Černeková, 2022.
Figure 1.
Image of the eye-tracking session at Comenius University. The participant, Zuzana Berger Haladová agrees with the publishing of her photo here. Photo by Zuzana Černeková, 2022.
Figure 2.
These three heatmaps show looking behavior of two restoration expert participants to the Ambrotype, Daguerreotype and Tintype scanned with the LLa scanning mode.
Figure 2.
These three heatmaps show looking behavior of two restoration expert participants to the Ambrotype, Daguerreotype and Tintype scanned with the LLa scanning mode.
Figure 3.
Tobii Pro Glasses 3.
Figure 3.
Tobii Pro Glasses 3.
Figure 4.
The pipeline of the Co-SIFT [
27].
Figure 4.
The pipeline of the Co-SIFT [
27].
Figure 5.
A total 200 points (a) and heatmap (b) calculated using the Harris corner detector.
Figure 5.
A total 200 points (a) and heatmap (b) calculated using the Harris corner detector.
Figure 6.
Keypoints (a) calculated using Co-SIFT detector, heatmap (b) calculated from the Co-SIFT keypoints.
Figure 6.
Keypoints (a) calculated using Co-SIFT detector, heatmap (b) calculated from the Co-SIFT keypoints.
Figure 7.
Cruse manual focus dialog for the unfocused picture.
Figure 7.
Cruse manual focus dialog for the unfocused picture.
Figure 8.
Cruse manual focus dialog for the focused picture.
Figure 8.
Cruse manual focus dialog for the focused picture.
Figure 9.
Cruse Focus Value Diagram: graph of sharpness function (left), detail of the graph with noise (right).
Figure 9.
Cruse Focus Value Diagram: graph of sharpness function (left), detail of the graph with noise (right).
Figure 10.
Picture of scanned black-and-white ruler.
Figure 10.
Picture of scanned black-and-white ruler.
Figure 11.
Unfocused with cm (left), unfocused with cm (center), focused with cm (right).
Figure 11.
Unfocused with cm (left), unfocused with cm (center), focused with cm (right).
Figure 12.
Grayscale images of ambrotype, daguerreotype, and tintype scanned in LRFB mode.
Figure 12.
Grayscale images of ambrotype, daguerreotype, and tintype scanned in LRFB mode.
Figure 13.
Grayscale images of ambrotype, daguerreotype, and tintype scanned in LLa mode.
Figure 13.
Grayscale images of ambrotype, daguerreotype, and tintype scanned in LLa mode.
Figure 14.
Difference images of ambrotype between LLa mode and LRFB reference mode. Left to right: difference image, SSIM map, ESSIM map, filtered edges of the image scanned in LLa mode.
Figure 14.
Difference images of ambrotype between LLa mode and LRFB reference mode. Left to right: difference image, SSIM map, ESSIM map, filtered edges of the image scanned in LLa mode.
Figure 15.
Difference images of daguerreotype between LLa mode and LRFB reference mode. Left to right: difference image, SSIM map, ESSIM map, filtered edges of the image scanned in LLa mode.
Figure 15.
Difference images of daguerreotype between LLa mode and LRFB reference mode. Left to right: difference image, SSIM map, ESSIM map, filtered edges of the image scanned in LLa mode.
Figure 16.
Difference images of tintype between LLa mode and LRFB reference mode. Left to right: difference image, SSIM map, ESSIM map, filtered edges of the image scanned in LLa mode.
Figure 16.
Difference images of tintype between LLa mode and LRFB reference mode. Left to right: difference image, SSIM map, ESSIM map, filtered edges of the image scanned in LLa mode.
Table 1.
Ambrotype. Comparison of images scanned in different scan modes with a reference image scanned in LRFB mode.
Table 1.
Ambrotype. Comparison of images scanned in different scan modes with a reference image scanned in LRFB mode.
| Ambrotype | UIQI | SSIM | ESSIM | Entropy |
|---|
| LRFB | 1.0000 | 1.0000 | 1.0000 | 6.4305 |
| LR | 0.9903 | 0.9879 | 0.9962 | 6.4254 |
| LFB | 0.9881 | 0.9683 | 0.9887 | 6.6589 |
| LF | 0.9240 | 0.9573 | 0.9851 | 6.6550 |
| LTx | 0.9996 | 0.9441 | 0.9818 | 7.0454 |
| LTx5cm | 0.9903 | 0.9634 | 0.9875 | 6.6757 |
| LTx10cm | 0.9892 | 0.9667 | 0.9872 | 6.4510 |
| RTx | 0.9567 | 0.9453 | 0.9819 | 6.7601 |
| RTx5cm | 0.9881 | 0.9608 | 0.9852 | 6.5538 |
| RTx10cm | 0.9875 | 0.9643 | 0.9852 | 6.4417 |
| LLa | 0.9776 | 0.9162 | 0.9743 | 7.0590 |
Table 2.
Ambrotype 15°. Comparison of images scanned in different scan modes with a reference image scanned in LRFB 15° mode.
Table 2.
Ambrotype 15°. Comparison of images scanned in different scan modes with a reference image scanned in LRFB 15° mode.
| Ambrotype 15° | UIQI | SSIM | eSSIM | Entropy |
|---|
| LRFB15deg | 1.0000 | 1.0000 | 1.0000 | 6.9887 |
| LR15deg | 0.9721 | 0.9879 | 0.9963 | 6.9889 |
| LFB15deg | 0.9738 | 0.9680 | 0.9887 | 7.1650 |
| LF15deg | 0.9749 | 0.9649 | 0.9875 | 7.1690 |
| L15deg | 0.9993 | 0.9660 | 0.9874 | 7.1763 |
Table 3.
Daguerreotype. Comparison of images scanned in different scan modes with a reference image scanned in LRFB mode.
Table 3.
Daguerreotype. Comparison of images scanned in different scan modes with a reference image scanned in LRFB mode.
| Daguerreotype | UIQI | SSIM | ESSIM | Entropy |
|---|
| LRFB | 1.0000 | 1.0000 | 1.0000 | 5.9694 |
| LR | 0.9969 | 0.9846 | 0.9951 | 5.9905 |
| LFB | 0.9993 | 0.9886 | 0.9965 | 5.9219 |
| LF | 0.9797 | 0.9871 | 0.9956 | 5.8905 |
| LTx | 0.9980 | 0.9858 | 0.9947 | 6.0465 |
| LTx5cm | 0.9979 | 0.9841 | 0.9946 | 5.9017 |
| LTx10cm | 0.9988 | 0.9704 | 0.9899 | 5.8276 |
| RTx | 0.9966 | 0.9844 | 0.9944 | 6.0112 |
| RTx5cm | 0.9986 | 0.9850 | 0.9952 | 5.9424 |
| RTx10cm | 0.9989 | 0.9806 | 0.9938 | 5.8953 |
| LLa | 0.9932 | 0.9793 | 0.9918 | 6.0670 |
Table 4.
Daguerreotype 15°. Comparison of images scanned in different scan modes with a reference image scanned in LRFB 15° mode.
Table 4.
Daguerreotype 15°. Comparison of images scanned in different scan modes with a reference image scanned in LRFB 15° mode.
| Daguerreotype 15° | UIQI | SSIM | eSSIM | Entropy |
|---|
| LRFB15deg | 1.0000 | 1.0000 | 1.0000 | 6.0504 |
| LR15deg | 0.9930 | 0.9843 | 0.9948 | 6.0094 |
| LFB15deg | 0.9887 | 0.9873 | 0.9956 | 6.0540 |
| LF15deg | 0.9865 | 0.9868 | 0.9953 | 6.0584 |
| L15deg | 0.9952 | 0.9847 | 0.9944 | 6.1109 |
Table 5.
Tintype. Comparison of images scanned in different scan modes with a reference image scanned in LRFB mode.
Table 5.
Tintype. Comparison of images scanned in different scan modes with a reference image scanned in LRFB mode.
| Tintype | UIQI | SSIM | eSSIM | Entropy |
|---|
| LRFB | 1.0000 | 1.0000 | 1.0000 | 5.5269 |
| LR | 0.9969 | 0.9783 | 0.9928 | 5.5345 |
| LFB | 0.9995 | 0.9801 | 0.9930 | 5.5269 |
| LF | 0.9738 | 0.9817 | 0.9937 | 5.5560 |
| LTx | 0.9996 | 0.9792 | 0.9929 | 5.6443 |
| LTx5cm | 0.9973 | 0.9804 | 0.9935 | 5.5671 |
| LTx10cm | 0.9970 | 0.9784 | 0.9931 | 5.4833 |
| RTx | 0.9932 | 0.9797 | 0.9928 | 5.5510 |
| RTx5cm | 0.9983 | 0.9816 | 0.9938 | 5.4741 |
| RTx10cm | 0.9992 | 0.9785 | 0.9929 | 5.4091 |
| LLa | 0.9984 | 0.9767 | 0.9920 | 5.7240 |
Table 6.
Tintype 15°. Comparison of images scanned in different scan modes with a reference image scanned in LRFB 15° mode.
Table 6.
Tintype 15°. Comparison of images scanned in different scan modes with a reference image scanned in LRFB 15° mode.
| Tintype 15° | UIQI | SSIM | eSSIM | Entropy |
|---|
| LRFB15deg | 1.0000 | 1.0000 | 1.0000 | 5.5559 |
| LR15deg | 0.9888 | 0.9844 | 0.9949 | 5.5757 |
| LFB15deg | 0.9889 | 0.9840 | 0.9946 | 5.6118 |
| LF15deg | 0.9891 | 0.9824 | 0.9938 | 5.6180 |
| L15deg | 0.9997 | 0.9837 | 0.9944 | 5.6524 |
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}