
Persistent Homology Approach for Human Presence Detection from 60 GHz OTFS Transmissions
 , , and
, , and
Abstract
1. Introduction
- We present the first-ever application of OTFS-based joint communication and sensing approach for human monitoring. We target the millimeter-wave license-exempt frequency band, and present our unique measurement test-bed for 60 GHz OTFS transmissions;
- We present persistent homology as an innovative approach for the detection of targets from two-dimensional delay-Doppler data;
- We demonstrate OTFS-based sensing with the realistic assumption of the targets representing non-integer multiples of designed delay and Doppler resolution of the OTFS system, and we compare the performance of the persistent homology detector with a conventional detector based on the constant false alarm rate.
2. Orthogonal Time Frequency Space Communication
2.1. OTFS Modulation
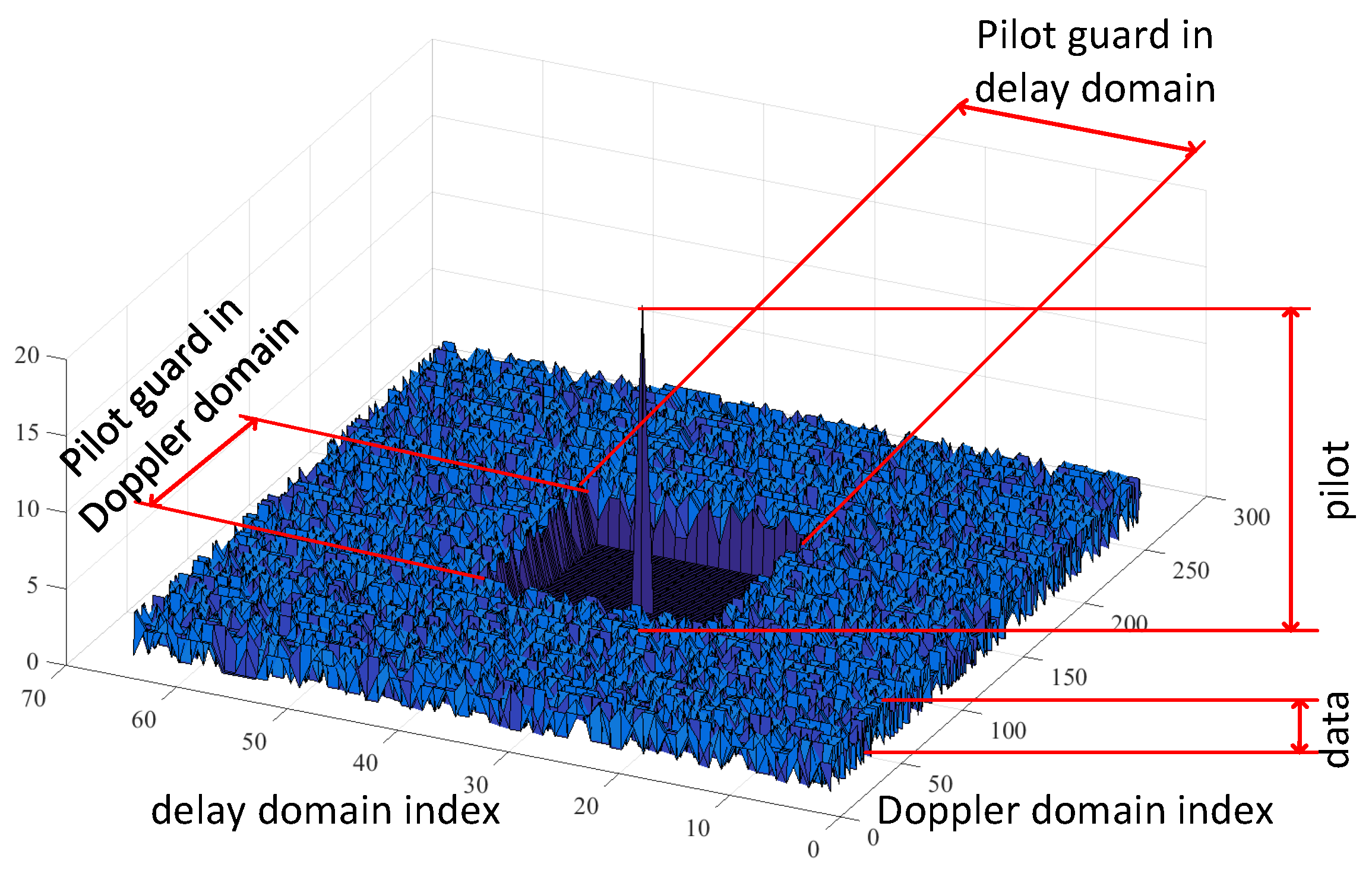
2.2. Embedded Pilots for Channel Estimation
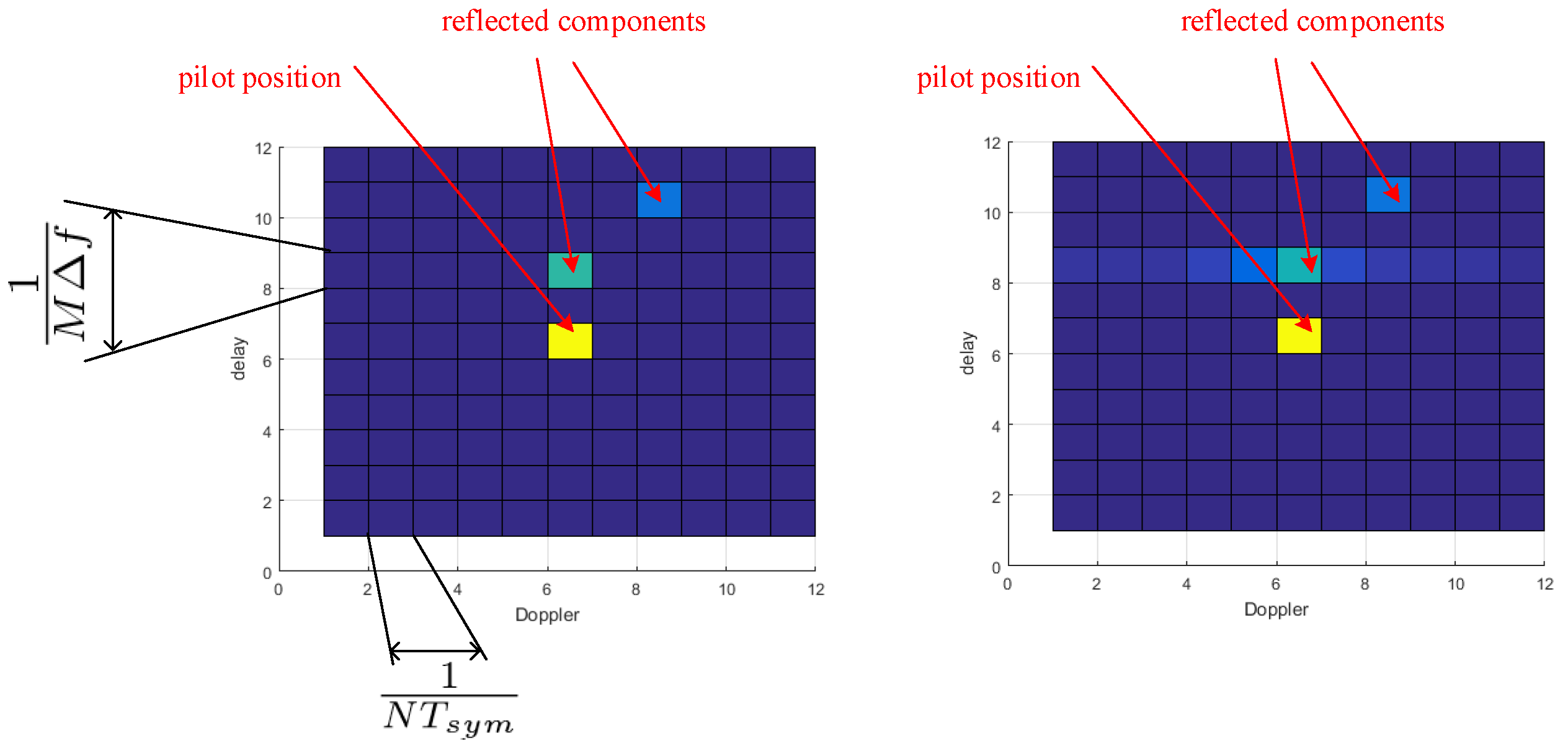
2.3. Delay-Doppler Resolution and Grid Mismatch
3. Target Detection Approaches
3.1. Constant False Alarm Rate Detector
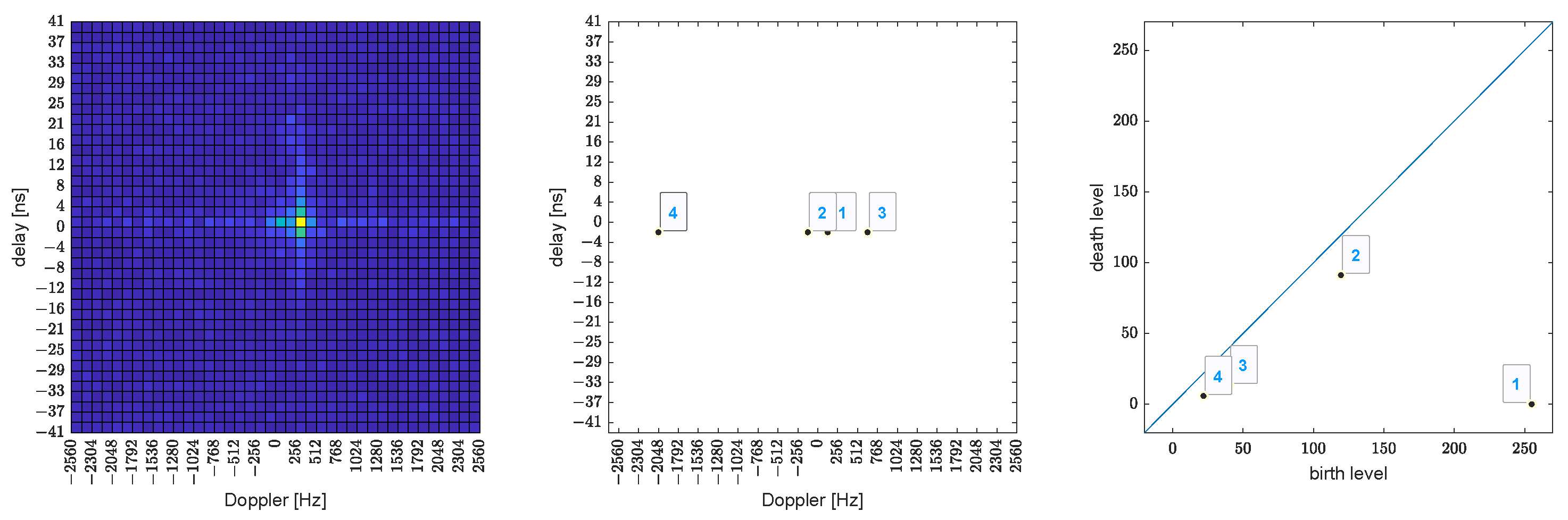
3.2. Persistent Homology
Pictorial Description (without Math)
4. Experiments
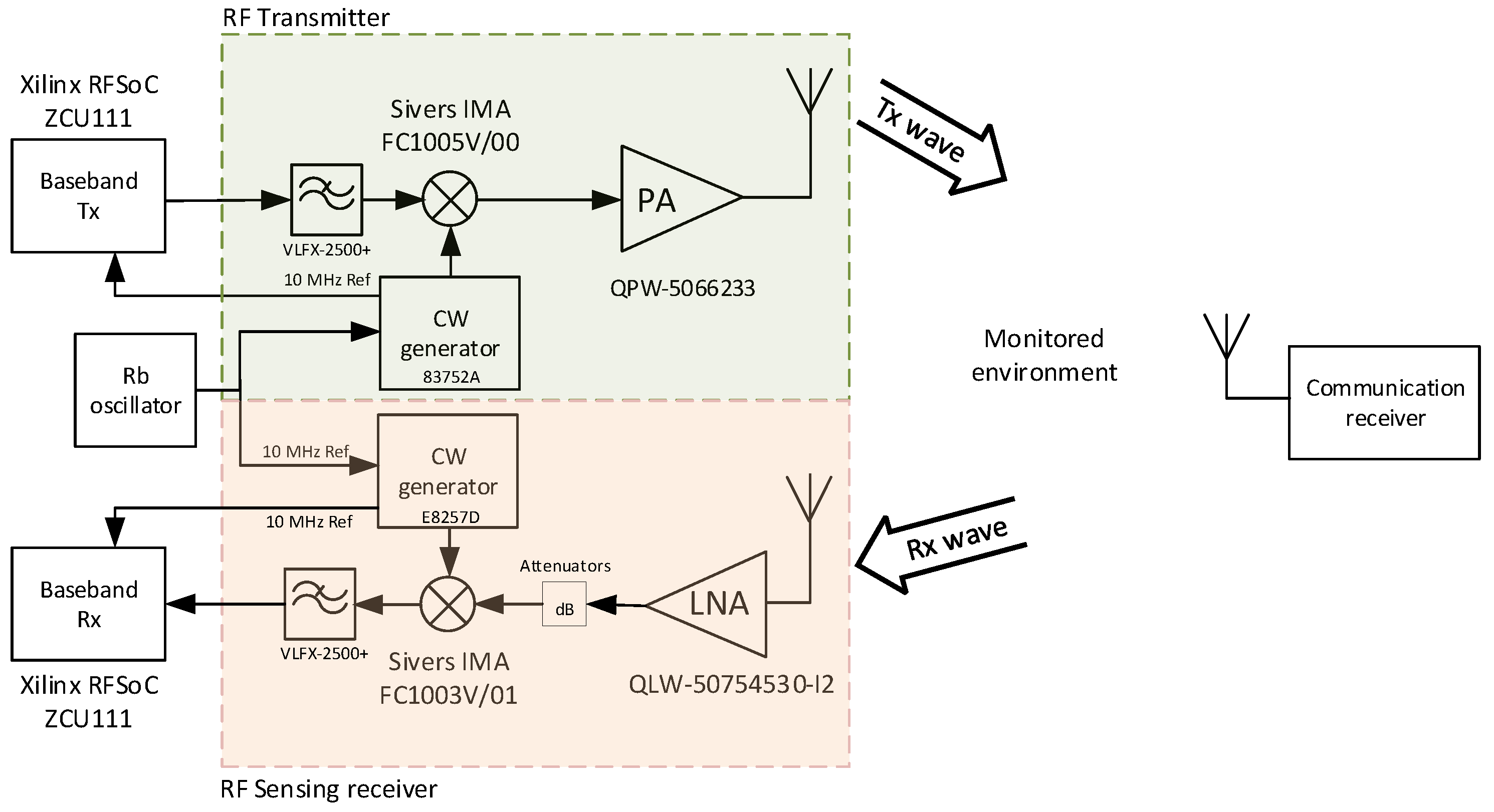
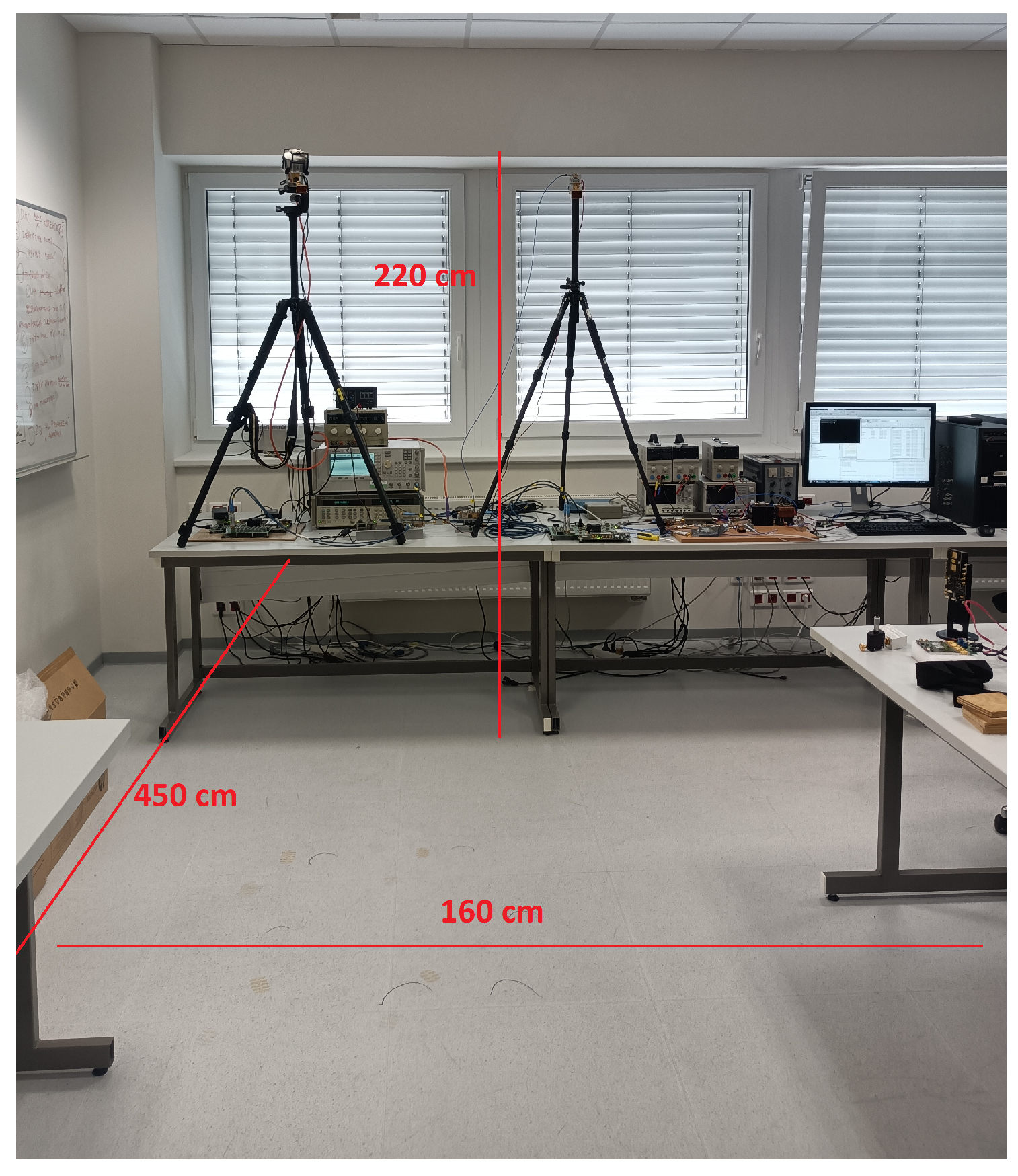
4.1. Measurement Test-Bed
4.2. Scenario
- A person standing still in front of antennas;
- A person randomly walking in the monitored area;
- A person running out from the monitored area;
- A person in front of the antennas jumping/dancing.
4.3. OTFS Configuration
4.4. Receiver Signal Processing
4.5. Persistent Homology and CFAR—Implementation and Settings
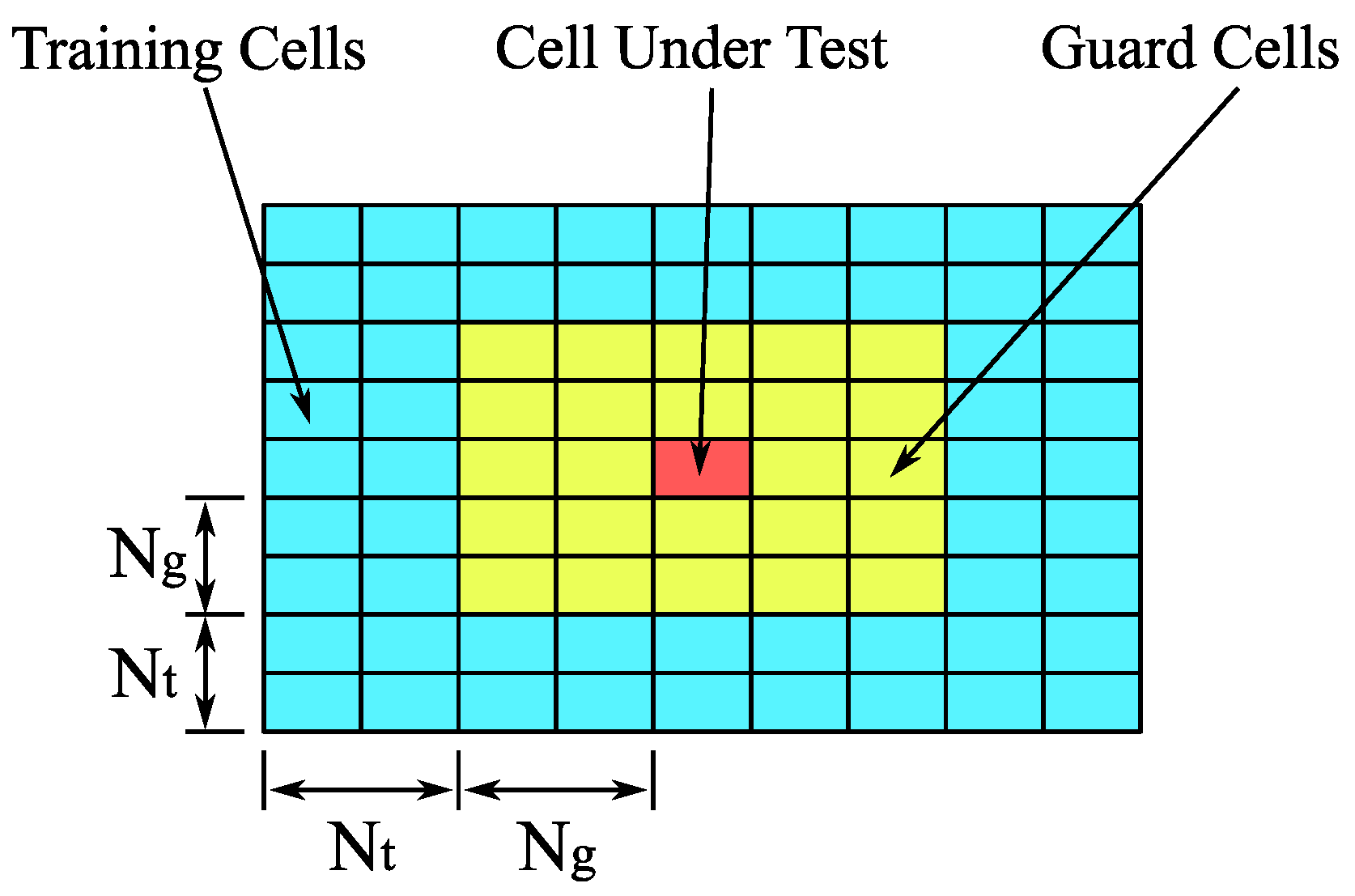
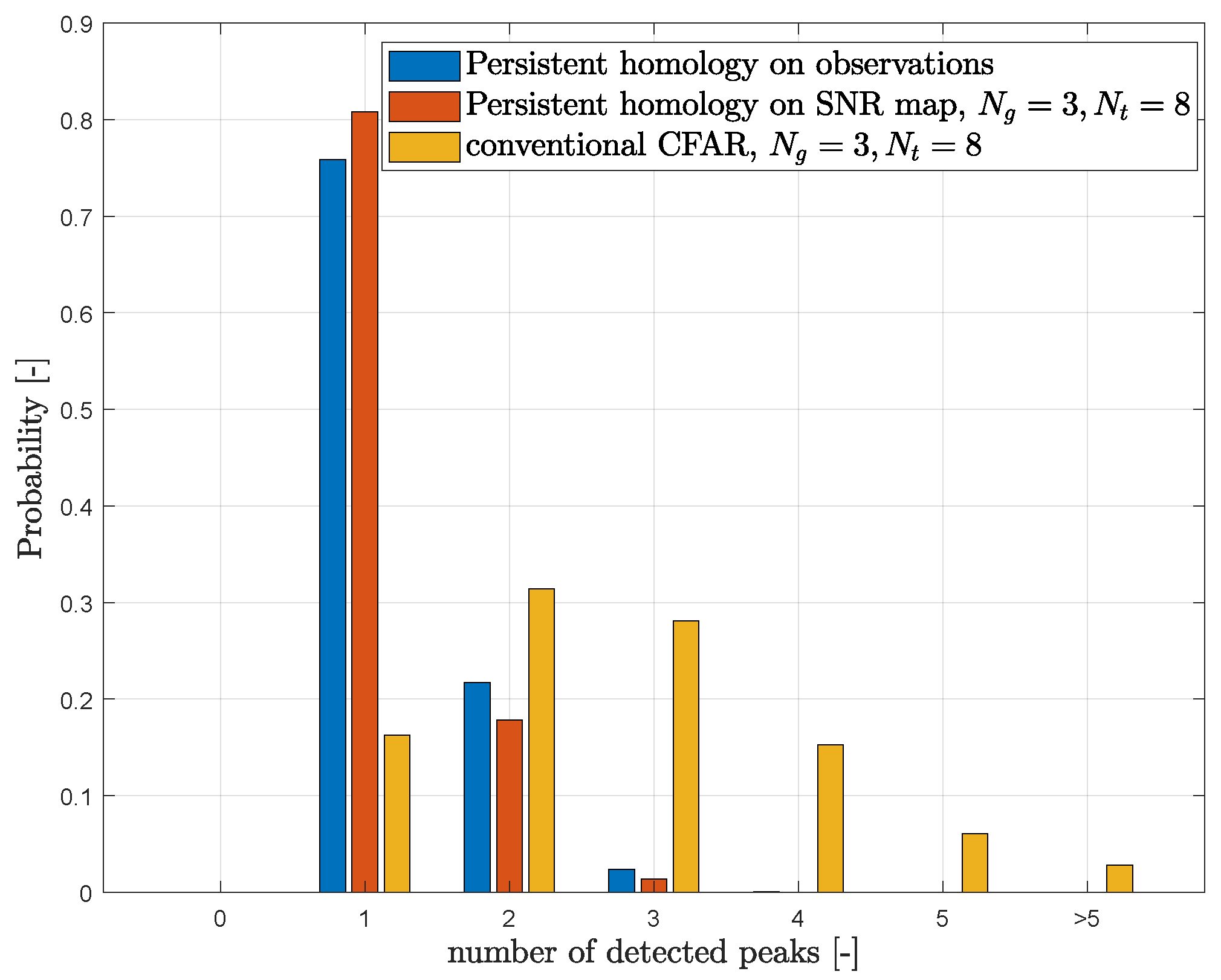
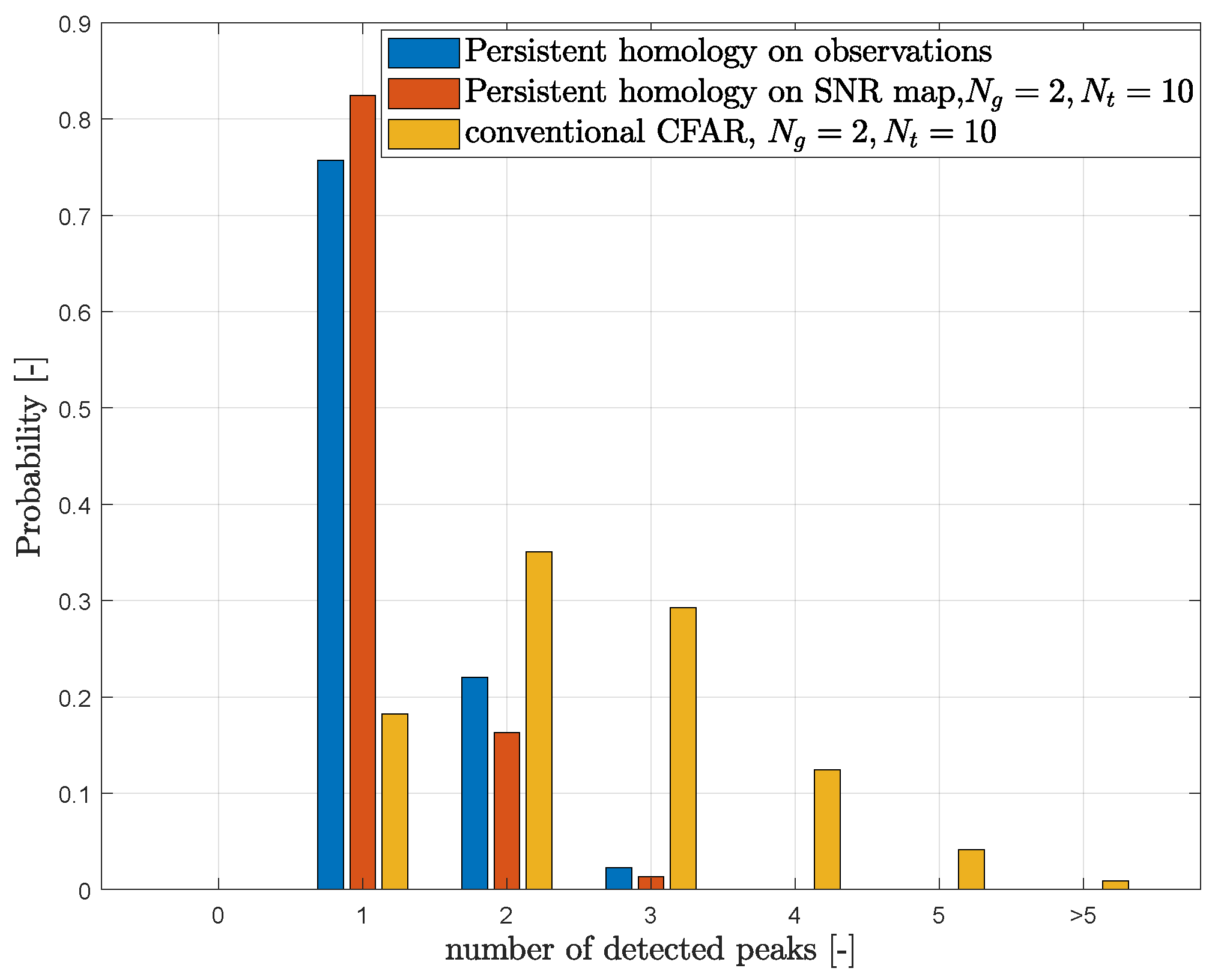
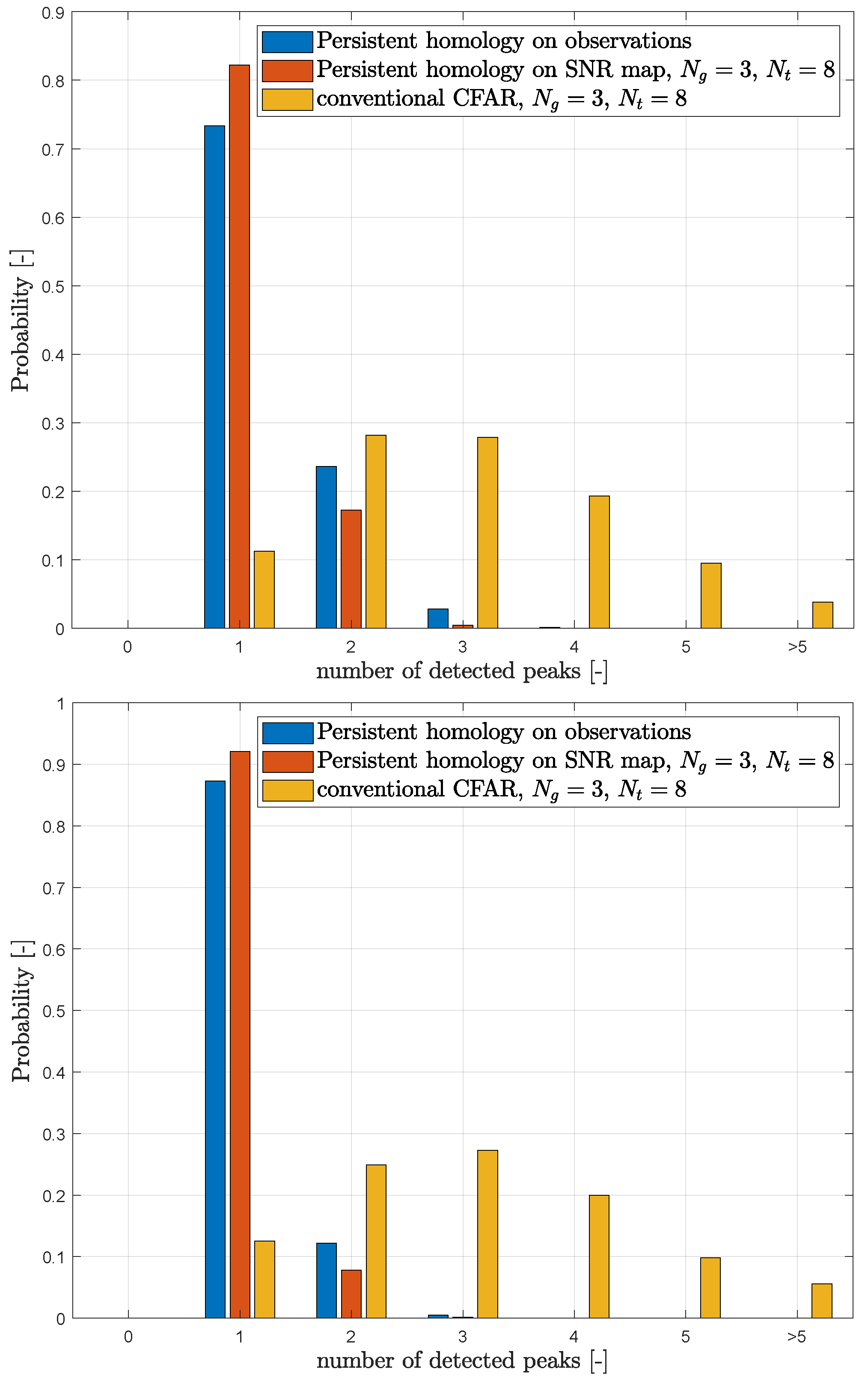
- Conventional CFARThe standard CFAR detector serves as a reference. The implementation of the CFAR detector from MATLAB’s Phased array toolbox was used [27]. The guard and training size parameters and have been found empirically, and they were set to the equal value in both delay and Doppler domains, see Figure 3. Their relation to in (6) is then given bySince the output of the conventional CFAR is a map of detected targets in a form of clusters of logical ones, an additional topological algorithm was needed for counting the distinct clusters, i.e., targets. The MATLAB function bwconncomp(x, conn) with its connectivity parameter conn set to four was used for this purpose. The results are presented for two sets of cell sizes, i.e., 3/8 and 2/10.
- Persistent homology applied on observations.In this first variant of the persistent homology detector, the method was applied directly to the estimated absolute values of the delay-Doppler map.For the persistent homology computations, we would like to acknowledge Prof. Huber for his persistent homology toolbox created in Python [32]. To set up a threshold for target detection, the z-scores were calculated from the potential target persistencies. The standardized z-score for the persistence of the i-th potential target is:where and represent the mean and standard deviation of the persistencies of all potential targets. The z-score of 6 was chosen as the threshold value.
- Persistent homology applied on SNR map.Before the application of the plain persistent homology approach, a Signal to Noise Ratio (SNR) for each cell from the delay-Doppler grid is computed as the ratio between the power in the cell under test and the noise variance in the training cells, similarly to in Equation (5). If we define the delay-Doppler image as a matrix with dimensions in the delay domain and in the Doppler domain, the signal part of the SNR map matrix at coordinates is defined aswhere is a single entry of at coordinates , with and . The SNR map matrix dimension is then in the delay domain and in the Doppler domain. The noise part is defined asThe SNR map matrix entries are then given byThe same guard and training cell settings and , as used for the reference conventional CFAR detector, were applied. Subsequently, the persistent homology method, with the same properties and settings as in the previous variant of the detector (persistent homology applied on observations), was applied to the SNR map (11).
5. Results
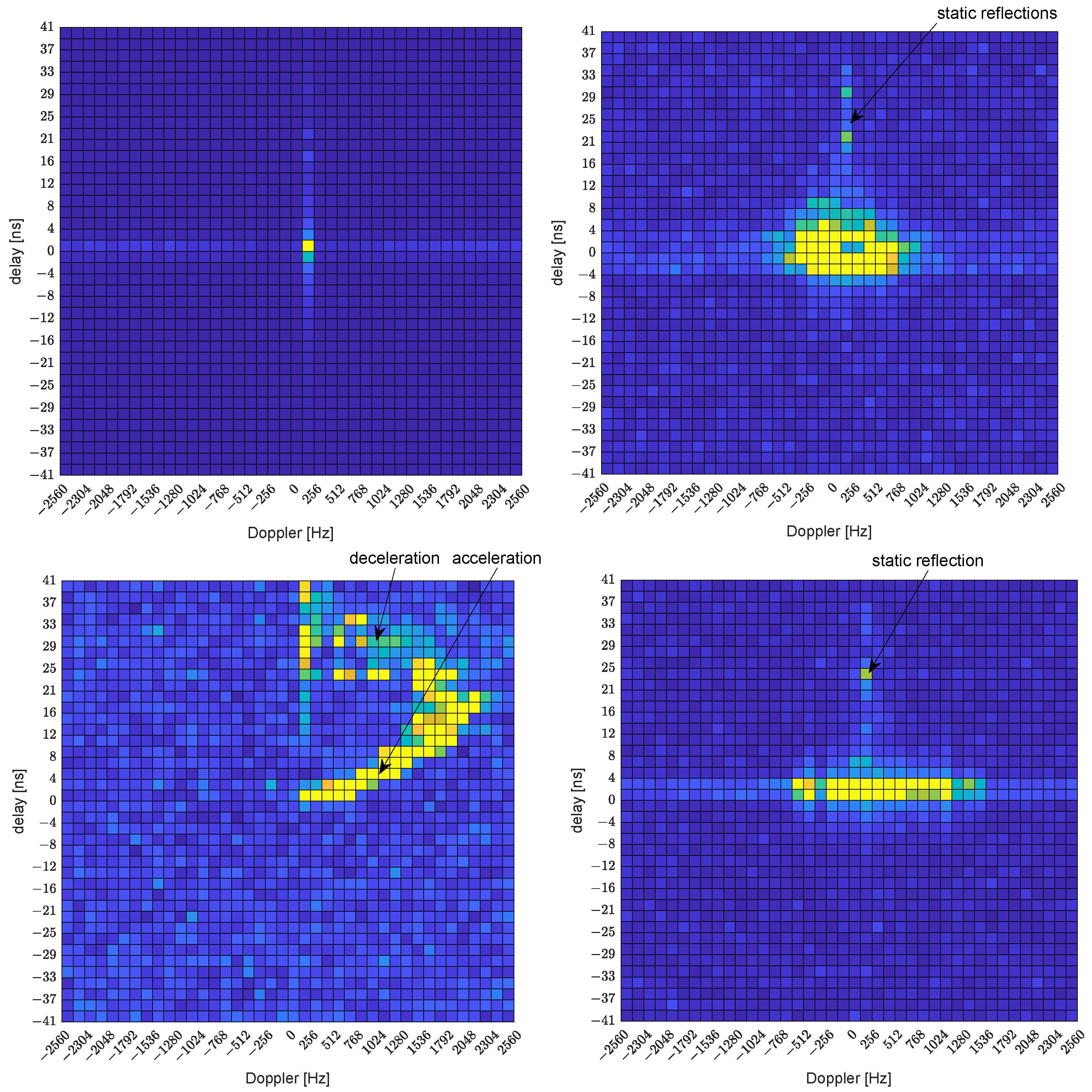
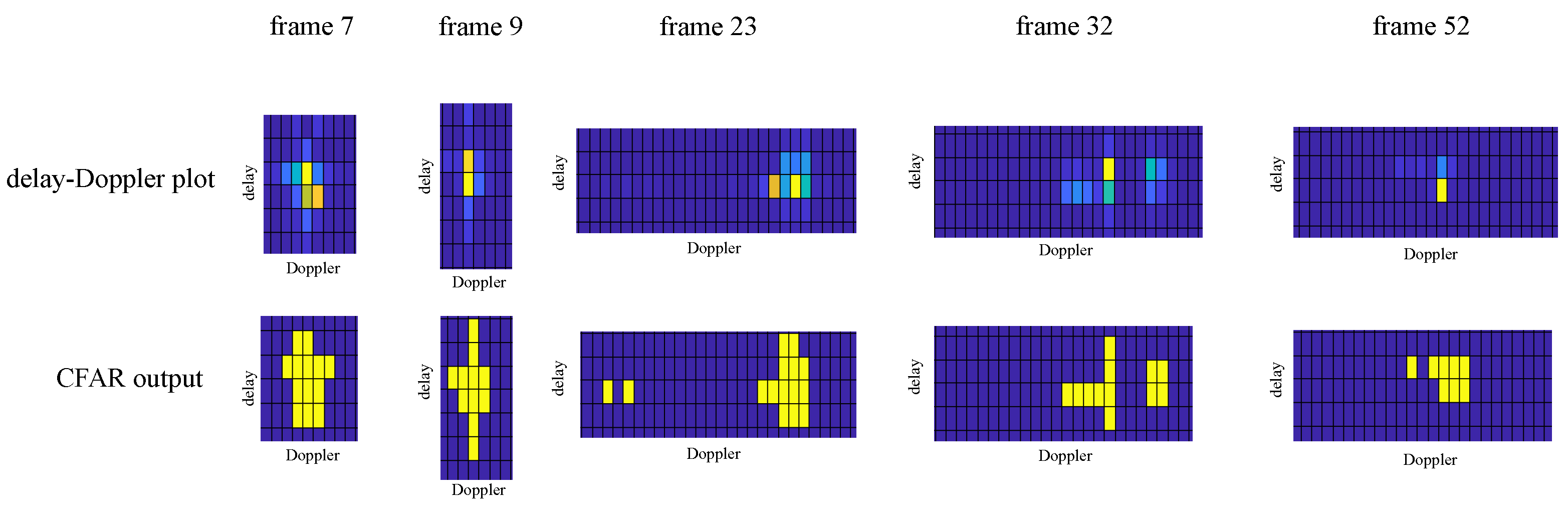
5.1. Delay-Doppler Plots for Selected Activities
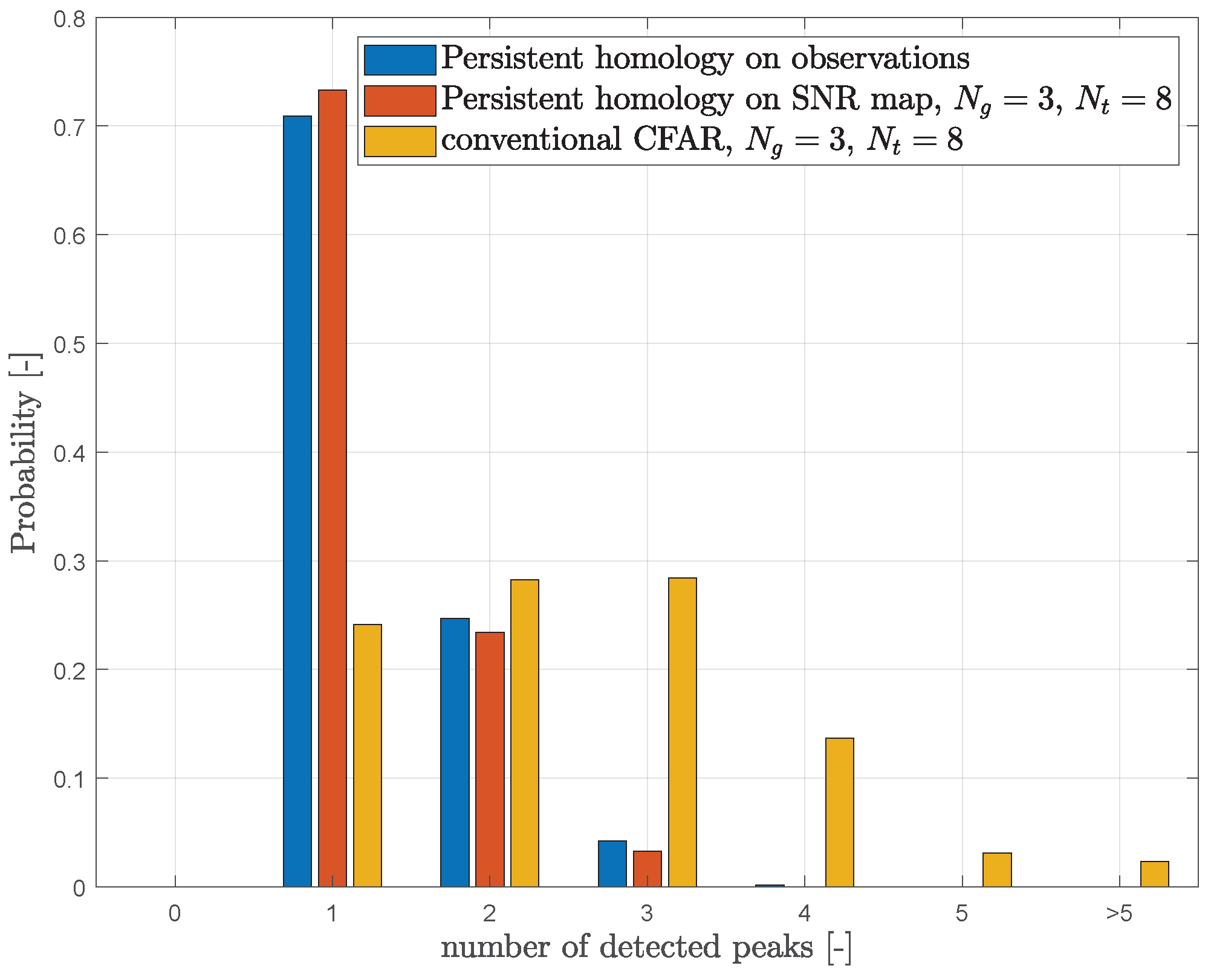
5.2. Performance of CFAR and Persistent Homology Detectors on Measured Data
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| OTFS | Orthogonal Time Frequency Space |
| ISaC | Integrated Sensing and Communications |
| CFAR | Constant False Alarm Rate |
| 6G | Sixth-Generation |
| UWB | Ultra Wide Band |
| FMCW | Frequency Modulated Continuous Wave |
| OFDM | Orthogonal Frequency Division Multiplex |
| WLAN | Wireless Local Area Network |
| IEEE | Institute of Electrical and Electronics Engineers |
| SDR | Software Defined Radio |
| 2D | Two-dimensional |
| QAM | Quadrature Amplitude Modulation |
| ISFFT | Inverse Symplectic Finite Fourier Transform |
| CP | Cyclic Prefix |
| CSI | Channel State Information |
| BER | Bit Error Rate |
| TDA | Topological Data Analysis |
| DAC | Digital to Analog Converter |
| ADC | Analog to Digital Converter |
| SNR | Signal to Noise Ratio |
| CPU | Central Processor Unit |
References
- Li, X.; Younes, R. Recovering Surveillance Video Using RF Cues. arXiv 2022, arXiv:2212.13340. [Google Scholar]
- Kocur, D.; Porteleky, T.; Švecová, M.; Švingál, M.; Fortes, J. A Novel Signal Processing Scheme for Static Person Localization Using M-Sequence UWB Radars. IEEE Sens. J. 2021, 21, 20296–20310. [Google Scholar] [CrossRef]
- Pegoraro, J.; Meneghello, F.; Rossi, M. Multiperson Continuous Tracking and Identification from mm-Wave Micro-Doppler Signatures. IEEE Trans. Geosci. Remote Sens. 2021, 59, 2994–3009. [Google Scholar] [CrossRef]
- Li, O.; He, J.; Zeng, K.; Yu, Z.; Du, X.; Zhou, Z.; Liang, Y.; Wang, G.; Chen, Y.; Zhu, P.; et al. Integrated sensing and communication in 6G: A prototype of high resolution multichannel THz sensing on portable device. EURASIP J. Wirel. Commun. Netw. 2022, 2022, 106. [Google Scholar] [CrossRef]
- Pin Tan, D.K.; He, J.; Li, Y.; Bayesteh, A.; Chen, Y.; Zhu, P.; Tong, W. Integrated Sensing and Communication in 6G: Motivations, Use Cases, Requirements, Challenges and Future Directions. In Proceedings of the 2021 1st IEEE International Online Symposium on Joint Communications & Sensing (JC&S), Dresden, Germany, 23–24 February 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Du, R.; Xie, H.; Hu, M.; Narengerile; Xin, Y.; McCann, S.; Montemurro, M.; Han, T.X.; Xu, J. An Overview on IEEE 802.11 bf: WLAN Sensing. arXiv 2022, arXiv:2207.04859. [Google Scholar]
- Schieler, S.; Schneider, C.; Andrich, C.; Döbereiner, M.; Luo, J.; Schwind, A.; Wendland, P.; Thomä, R.S.; Del Galdo, G. OFDM Waveform for Distributed Radar Sensing in Automotive Scenarios. In Proceedings of the 2019 16th European Radar Conference (EuRAD), Paris, France, 2–4 October 2019; pp. 225–228. [Google Scholar]
- Pfeffer, C.; Feger, R.; Jahn, M.; Stelzer, A. A 77-GHz software defined OFDM radar. In Proceedings of the 2014 15th International Radar Symposium (IRS), Gdańsk, Poland, 16–18 June 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Hadani, R.; Rakib, S.; Tsatsanis, M.; Monk, A.; Goldsmith, A.J.; Molisch, A.F.; Calderbank, R. Orthogonal time frequency space modulation. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Gaudio, L.; Colavolpe, G.; Caire, G. OTFS vs. OFDM in the Presence of Sparsity: A Fair Comparison. IEEE Trans. Wirel. Commun. 2022, 21, 4410–4423. [Google Scholar] [CrossRef]
- Thaj, T.; Viterbo, E. OTFS Modem SDR Implementation and Experimental Study of Receiver Impairment Effects. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Neelam, S.G.; Sahu, P.R. Analysis, Estimation and Compensation of Hardware Impairments for CP-OTFS Systems. IEEE Wirel. Commun. Lett. 2022, 11, 952–956. [Google Scholar] [CrossRef]
- Hadani, R.; Rakib, S.; Molisch, A.; Ibars, C.; Monk, A.; Tsatsanis, M.; Delfeld, J.; Goldsmith, A.; Calderbank, R. Orthogonal time frequency space (OTFS) modulation for millimeter-wave communications systems. In Proceedings of the 2017 IEEE MTT-S International Microwave Symposium (IMS), Honolulu, HI, USA, 4–9 June 2017; pp. 681–683. [Google Scholar]
- Marsalek, R.; Blumenstein, J.; Schützenhöfer, D.; Pospisil, M. OTFS Modulation and Influence of Wideband RF Impairments Measured on a 60 GHz Testbed. In Proceedings of the 2020 IEEE 21st International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Atlanta, GA, USA, 26–29 May 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Raviteja, P.; Phan, K.T.; Hong, Y.; Viterbo, E. Orthogonal Time Frequency Space (OTFS) Modulation Based Radar System. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, C.; Liu, S.; Mao, Z.; Huang, Y.; Wang, H. Low-Complexity Parameter Learning for OTFS Modulation Based Automotive Radar. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 8208–8212. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, T.; Shen, Y. Modulation Symbol Cancellation for OTFS-Based Joint Radar and Communication. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zhou, W.; Xie, J.; Xi, K.; Du, Y. Modified cell averaging CFAR detector based on Grubbs criterion in non-homogeneous background. IET Radar Sonar Navig. 2019, 13, 104–112. [Google Scholar] [CrossRef]
- Smith, M.; Varshney, P. Intelligent CFAR processor based on data variability. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 837–847. [Google Scholar] [CrossRef]
- Li, Y.; Wei, Y.; Li, B.; Alterovitz, G. Modified Anderson-Darling Test-Based Target Detector in Non-Homogenous Environments. Sensors 2014, 14, 16046–16061. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Jiang, R.; Wang, X.; Gao, H. Robust CFAR Detection for Multiple Targets in K-Distributed Sea Clutter Based on Machine Learning. Symmetry 2019, 11, 1482. [Google Scholar] [CrossRef]
- Huber, S. Persistent Homology in Data Science. In Data Science—Analytics and Applications; Haber, P., Lampoltshammer, T., Mayr, M., Plankensteiner, K., Eds.; Springer: Wiesbaden, Germany, 2021; pp. 81–88. [Google Scholar]
- Pita Costa, J. Topological data analysis and applications. In Proceedings of the 2017 40th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 22–26 May 2017; pp. 558–563. [Google Scholar] [CrossRef]
- Farhang, A.; RezazadehReyhani, A.; Doyle, L.E.; Farhang-Boroujeny, B. Low complexity modem structure for OFDM-based orthogonal time frequency space modulation. IEEE Wirel. Commun. Lett. 2017, 7, 344–347. [Google Scholar] [CrossRef]
- Raviteja, P.; Phan, K.T.; Hong, Y. Embedded Pilot-Aided Channel Estimation for OTFS in Delay–Doppler Channels. IEEE Trans. Veh. Technol. 2019, 68, 4906–4917. [Google Scholar] [CrossRef]
- Zemen, T.; Hofer, M.; Loeschenbrand, D.; Pacher, C. Iterative detection for orthogonal precoding in doubly selective channels. In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 1–7. [Google Scholar]
- Richards, M. Fundamentals of radar SIGNAL Processing; McGraw-Hill: New York, NY, USA, 2005. [Google Scholar]
- Bubenik, P. Statistical Topological Data Analysis using Persistence Landscapes. J. Mach. Learn. Res. 2015, 16, 77–102. [Google Scholar]
- Najman, L.; Schmitt, M. Watershed of a continuous function. Signal Process. 1994, 38, 99–112. [Google Scholar] [CrossRef]
- Koplik, G. Persistent Homology: A Non-Mathy Introduction with Examples. 2022. Available online: https://towardsdatascience.com/persistent-homology-with-examples-1974d4b9c3d0 (accessed on 3 November 2022).
- Muric, A.; Georgiadis, C.A.; Sangogboye, F.C.; Kjærgaard, M.B. Practical IR-UWB-Based Occupant Counting Evaluated in Multiple Field Settings. In Proceedings of the DFHS’19: 1st ACM International Workshop on Device-Free Human Sensing, New York, NY, USA, 10 November 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 48–51. [Google Scholar] [CrossRef]
- Huber, s. Topological Peak Detection in Two-Dimensional Data. Available online: https://www.sthu.org/code/codesnippets/imagepers.html (accessed on 30 December 2022).
- Kral, J.; Gotthans, T.; Harvanek, M. Analytical method of fractional sample period synchronisation for digital predistortion systems. In Proceedings of the 2017 27th International Conference Radioelektronika (RADIOELEKTRONIKA), Brno, Czech Republic, 19–20 April 2017; pp. 1–5. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| M, number of subcarriers [-] | 1900 |
| , number of zero subcarriers [-] | 100 |
| N, number of symbols in OTFS slot [-] | 2000 |
| , delay resolution | 2.1 ns |
| , Doppler resolution | 128 Hz |
| Number of pilot guards in delay domain [-] | 48 |
| Number of pilot guards in Doppler domain [-] | 48 |
| Sampling frequency | 512 MHz |
| Signal bandwidth | ≈490 MHz |
| Data symbols | 4-QAM, uncoded |
| Communication data rate | ≈920 Mbit/s |
| Cells | Cells | z-Score Threshold | Time Complexity [ms] | |
|---|---|---|---|---|
| Conventional CFAR | ||||
| 3 | 8 | N/A | 10.0 | |
| 2 | 10 | N/A | 9.9 | |
| Persistent homology applied on observations | ||||
| N/A | N/A | N/A | 6 | 264.6 |
| N/A | N/A | N/A | 6 | 243.2 |
| Persistent homology applied on SNR map | ||||
| 3 | 8 | N/A | 6 | 269.5 |
| 2 | 10 | N/A | 6 | 249.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maršálek, R.; Zedka, R.; Zöchmann, E.; Vychodil, J.; Závorka, R.; Ghiaasi, G.; Blumenstein, J. Persistent Homology Approach for Human Presence Detection from 60 GHz OTFS Transmissions. Sensors 2023, 23, 2224. https://doi.org/10.3390/s23042224
Maršálek R, Zedka R, Zöchmann E, Vychodil J, Závorka R, Ghiaasi G, Blumenstein J. Persistent Homology Approach for Human Presence Detection from 60 GHz OTFS Transmissions. Sensors. 2023; 23(4):2224. https://doi.org/10.3390/s23042224
Chicago/Turabian StyleMaršálek, Roman, Radim Zedka, Erich Zöchmann, Josef Vychodil, Radek Závorka, Golsa Ghiaasi, and Jiří Blumenstein. 2023. "Persistent Homology Approach for Human Presence Detection from 60 GHz OTFS Transmissions" Sensors 23, no. 4: 2224. https://doi.org/10.3390/s23042224
APA StyleMaršálek, R., Zedka, R., Zöchmann, E., Vychodil, J., Závorka, R., Ghiaasi, G., & Blumenstein, J. (2023). Persistent Homology Approach for Human Presence Detection from 60 GHz OTFS Transmissions. Sensors, 23(4), 2224. https://doi.org/10.3390/s23042224