
Model Updating Concept Using Bridge Weigh-in-Motion Data





Abstract
:1. Introduction
2. Materials and Methods
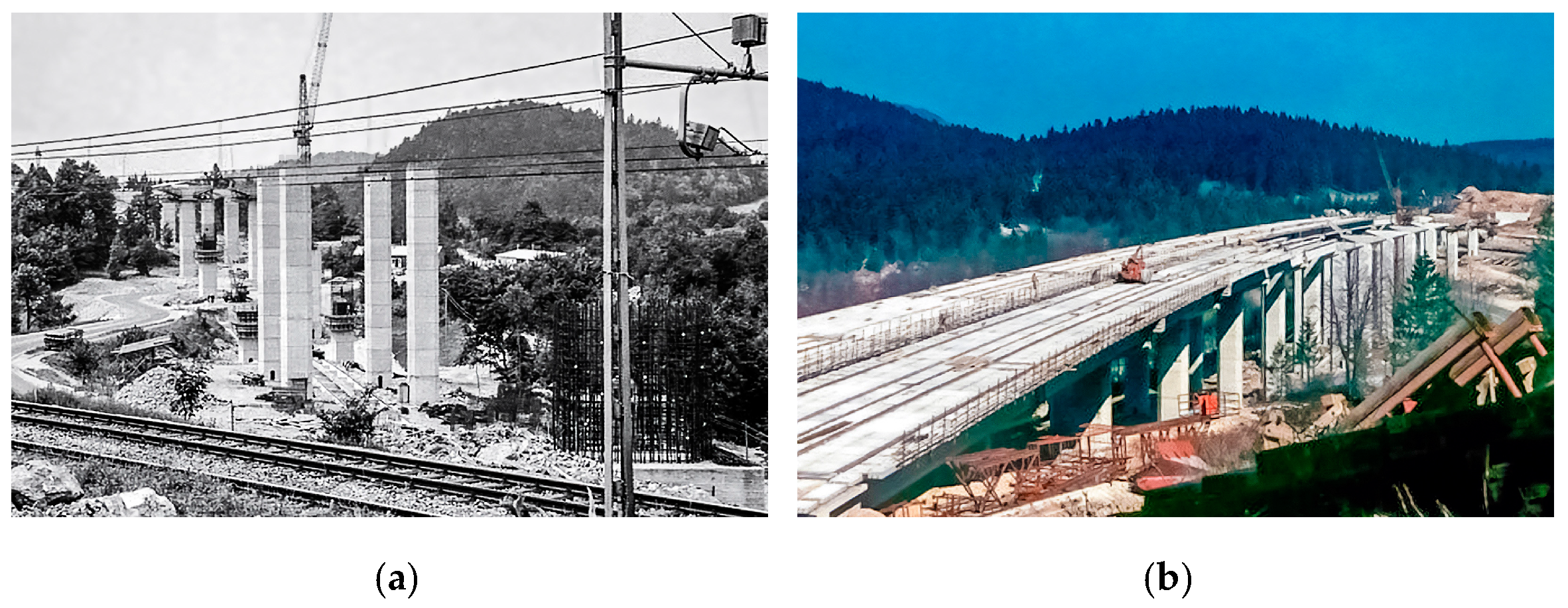
2.1. History of the Viaduct
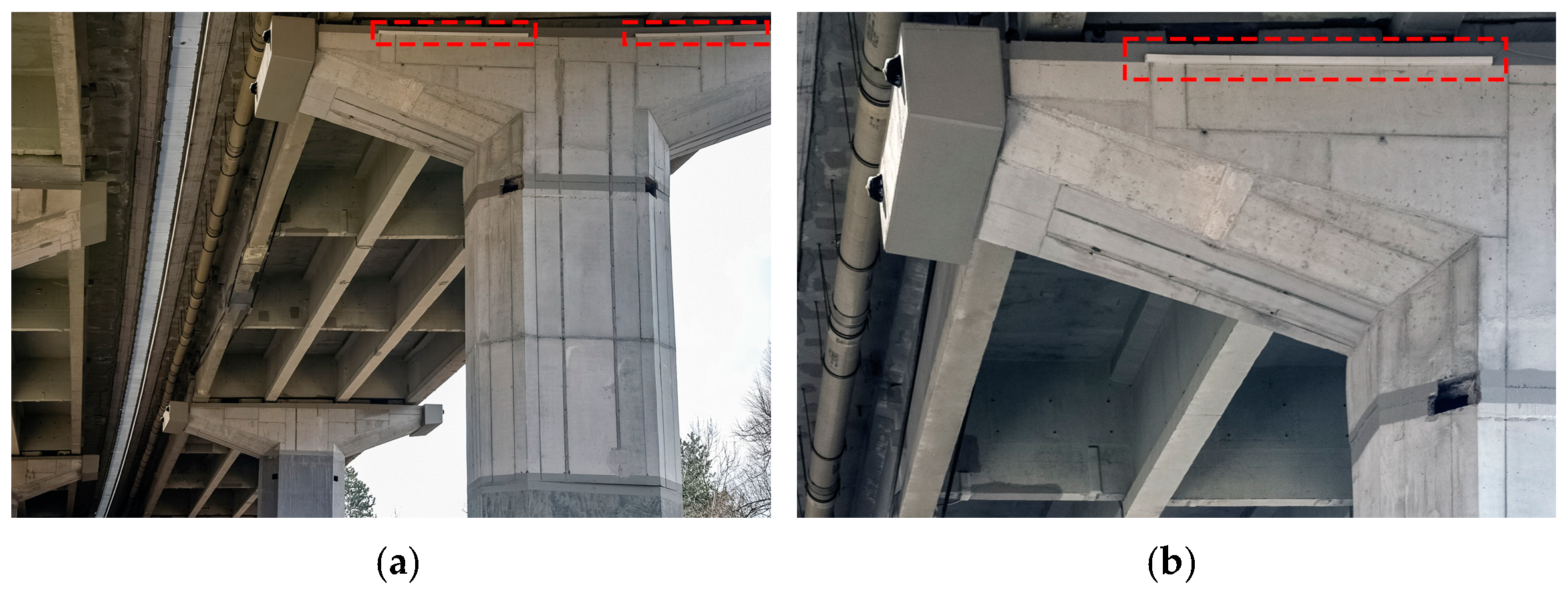
2.2. Establishment of the Monitoring System
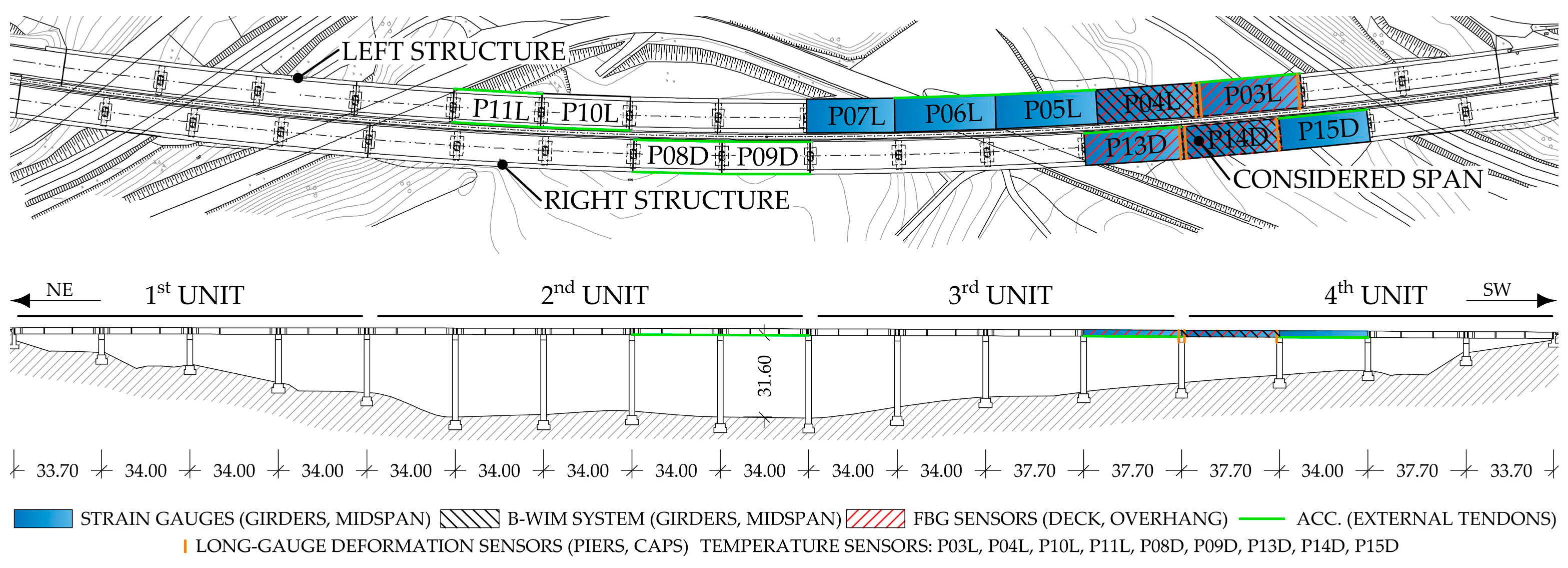
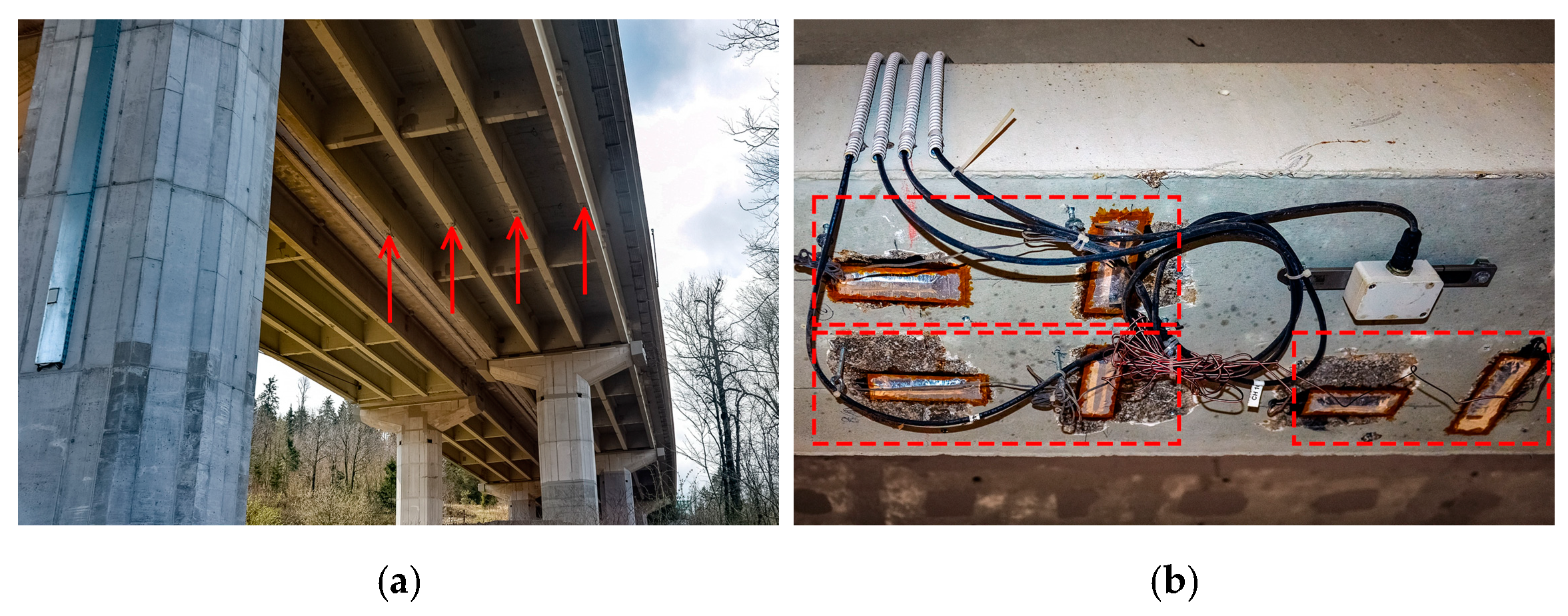
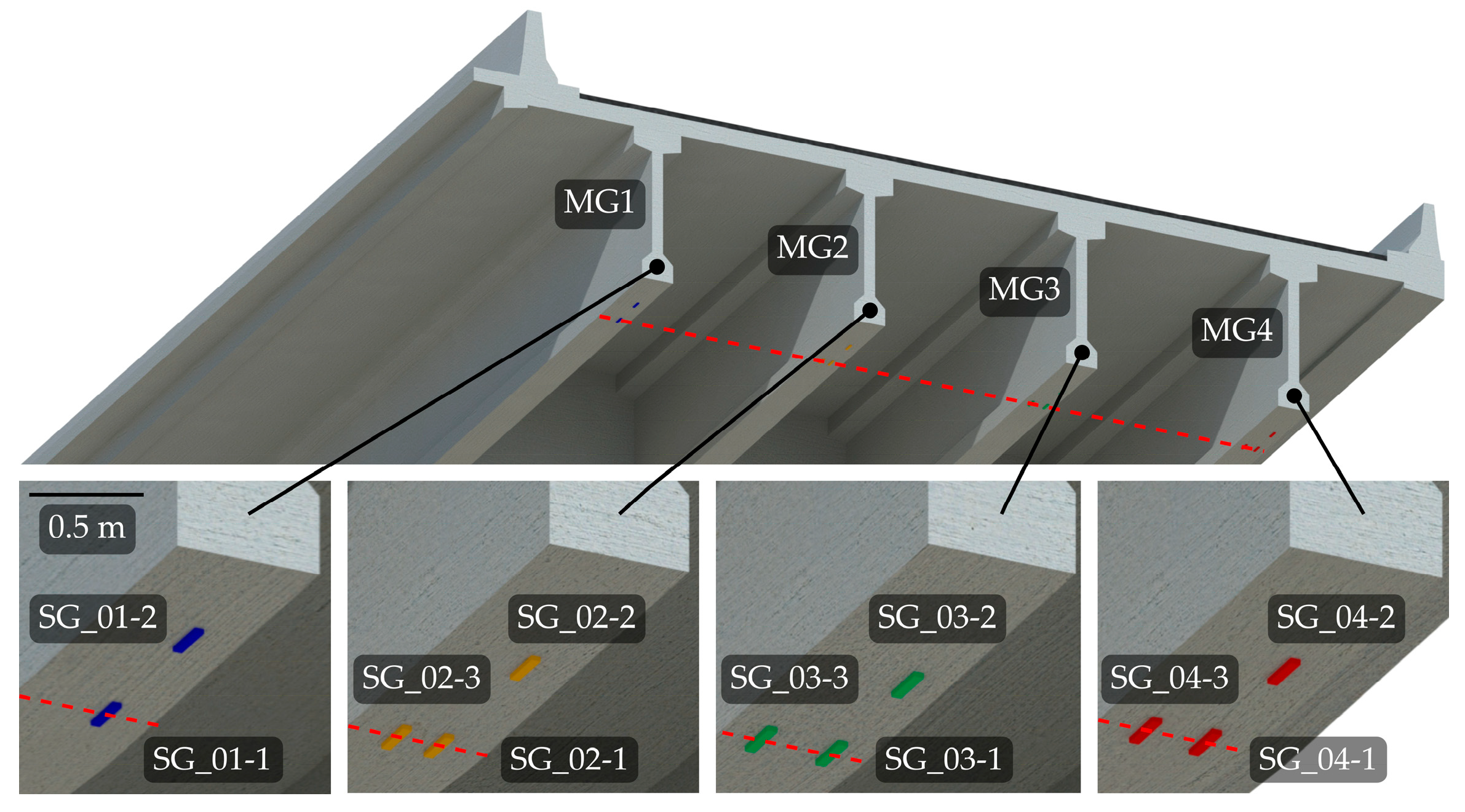
2.2.1. Sensor Description
- P05L, P06L, P07L: one strain gauge per each external main girder (6 overall);
- P03L, P13D, and P15D: one strain gauge per each main girder (12 overall);
- P14D: three strain gauges per each main girder (12 overall);
- P04L: four strain gauges per main girder (16 overall).
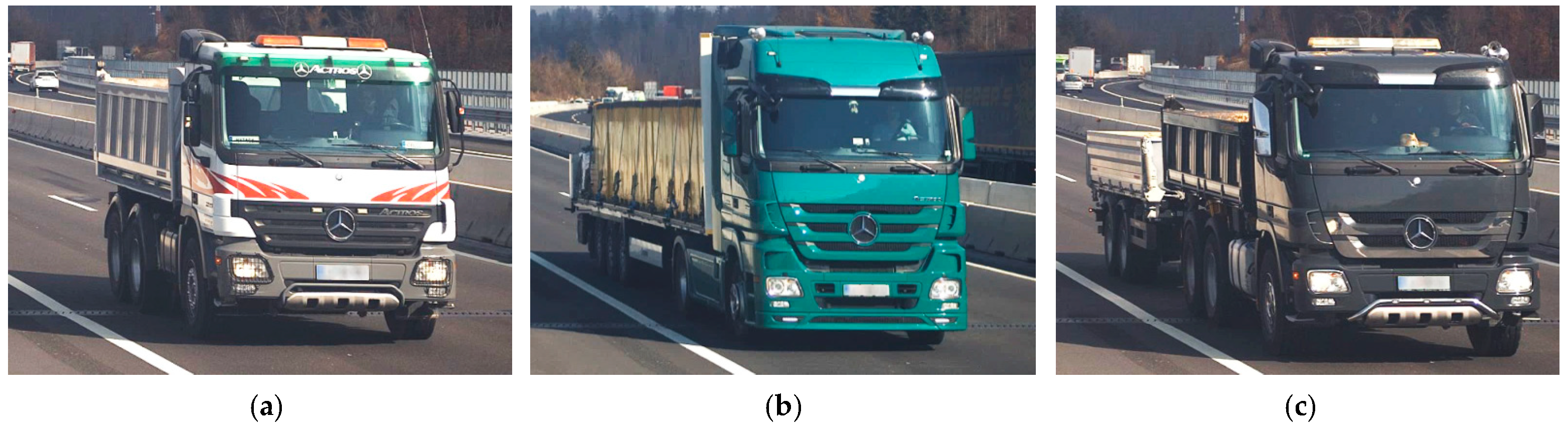
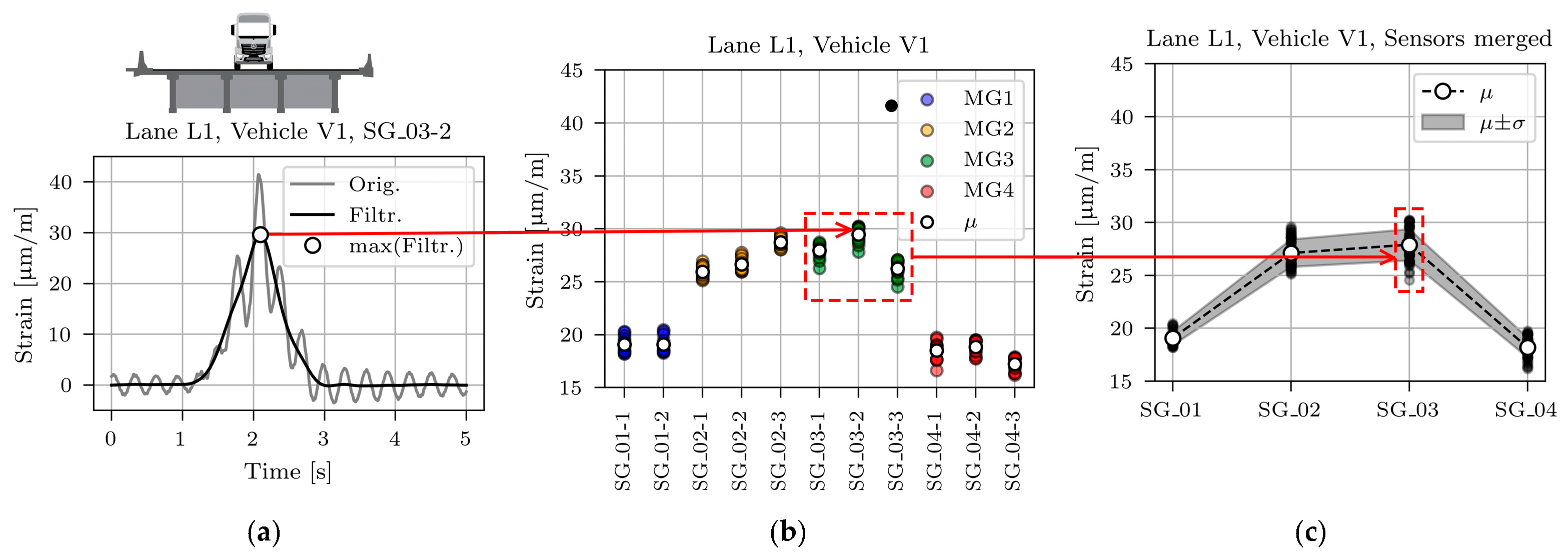
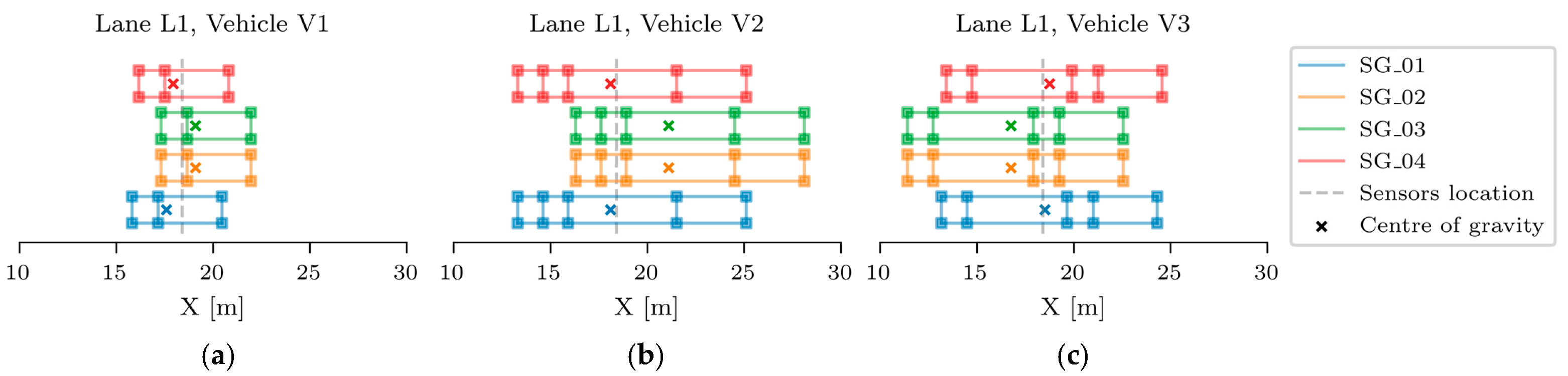
2.2.2. Calibration Vehicle Passages
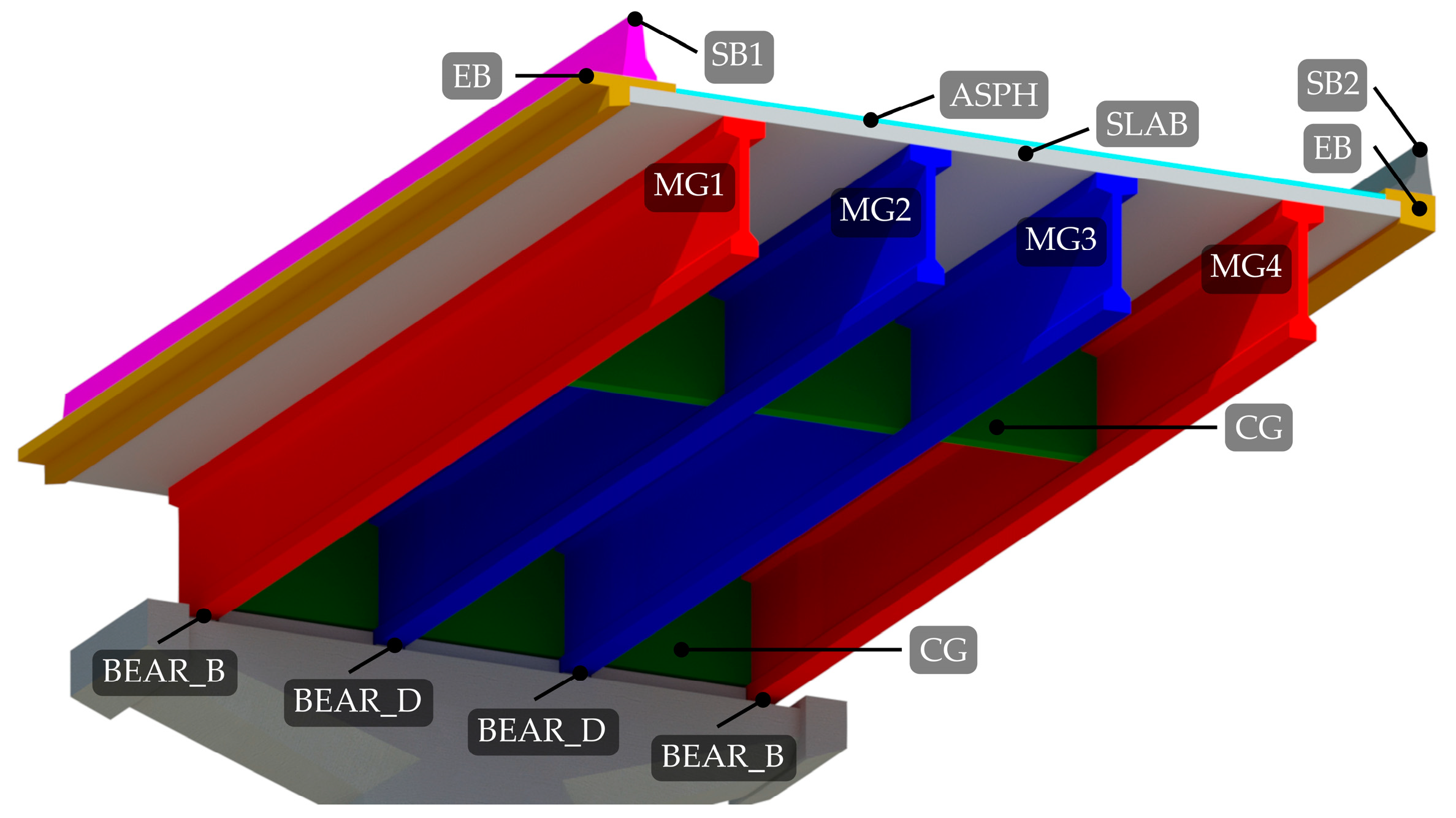
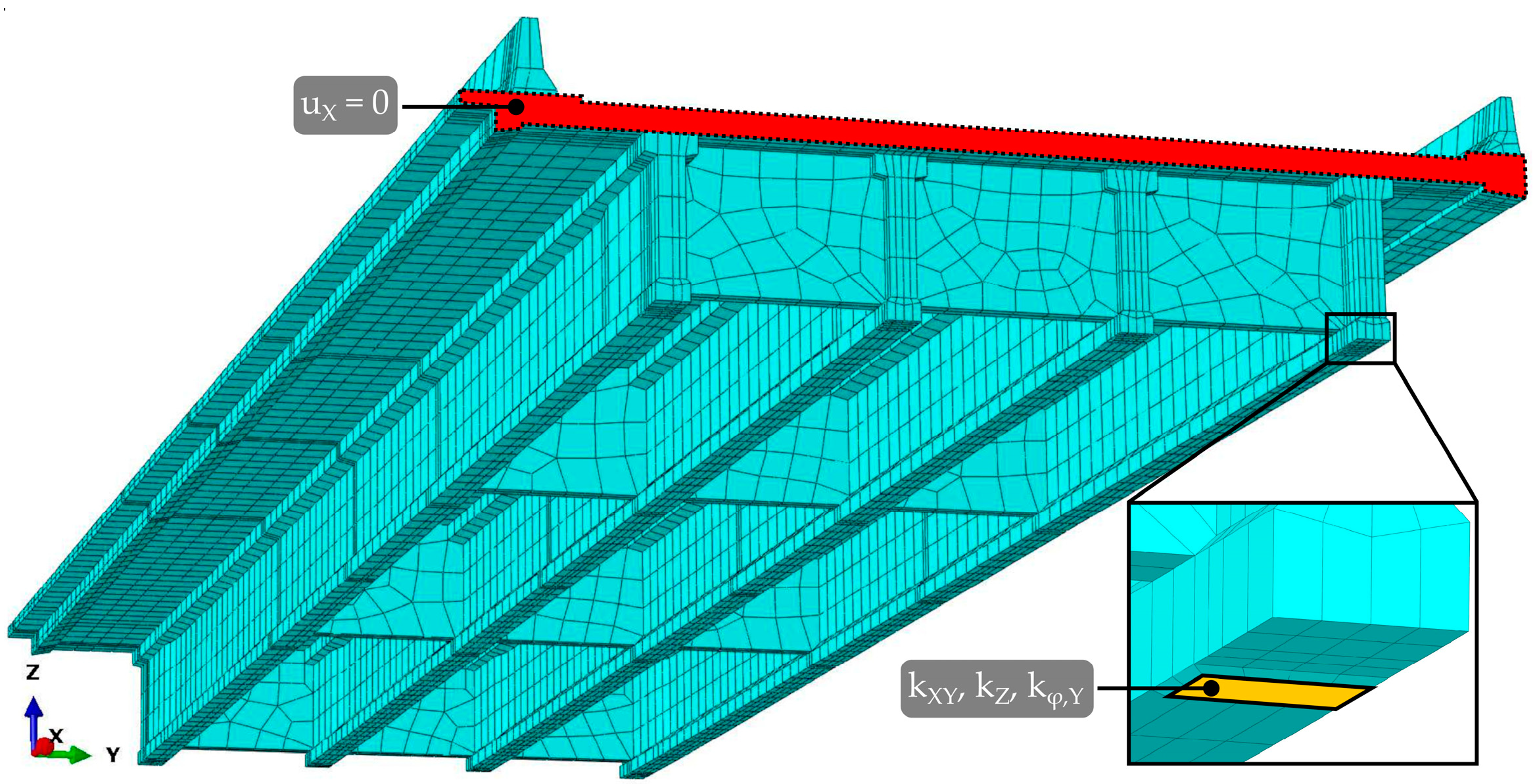
2.3. Structural System and FE Model of the Considered Span
2.4. Model Updating
2.4.1. Objective Function
- denotes the calibration vehicle index;
- denotes the number of calibration vehicles considered (3 in this study);
- denotes the main girder index;
- denotes the number of main girders considered (4 in this study);
- denotes the standard deviation of measured strains for main girder g and vehicle v;
- denotes the strain gauge sensor index on the selected main girder;
- denotes the number of strain gauges considered in a given girder g (2 or 3 in this study);
- denotes the passage index of the selected calibration vehicle;
- denotes the number of vehicle v passages;
- denotes the FE model longitudinal strain, oriented parallel to the X (longitudinal) direction of the viaduct—, (see Figure 18) in the selected node that corresponds to the -th strain gauge sensor on the -th main girder, caused by the -th calibration vehicle positioned on location that results in the maximum strain at sensors SG_0g;
- denotes the maximum measured longitudinal strain (Section 2.2.2) in the -th strain gauge sensor on the -th main girder, caused by the -th calibration vehicle during -th passage.
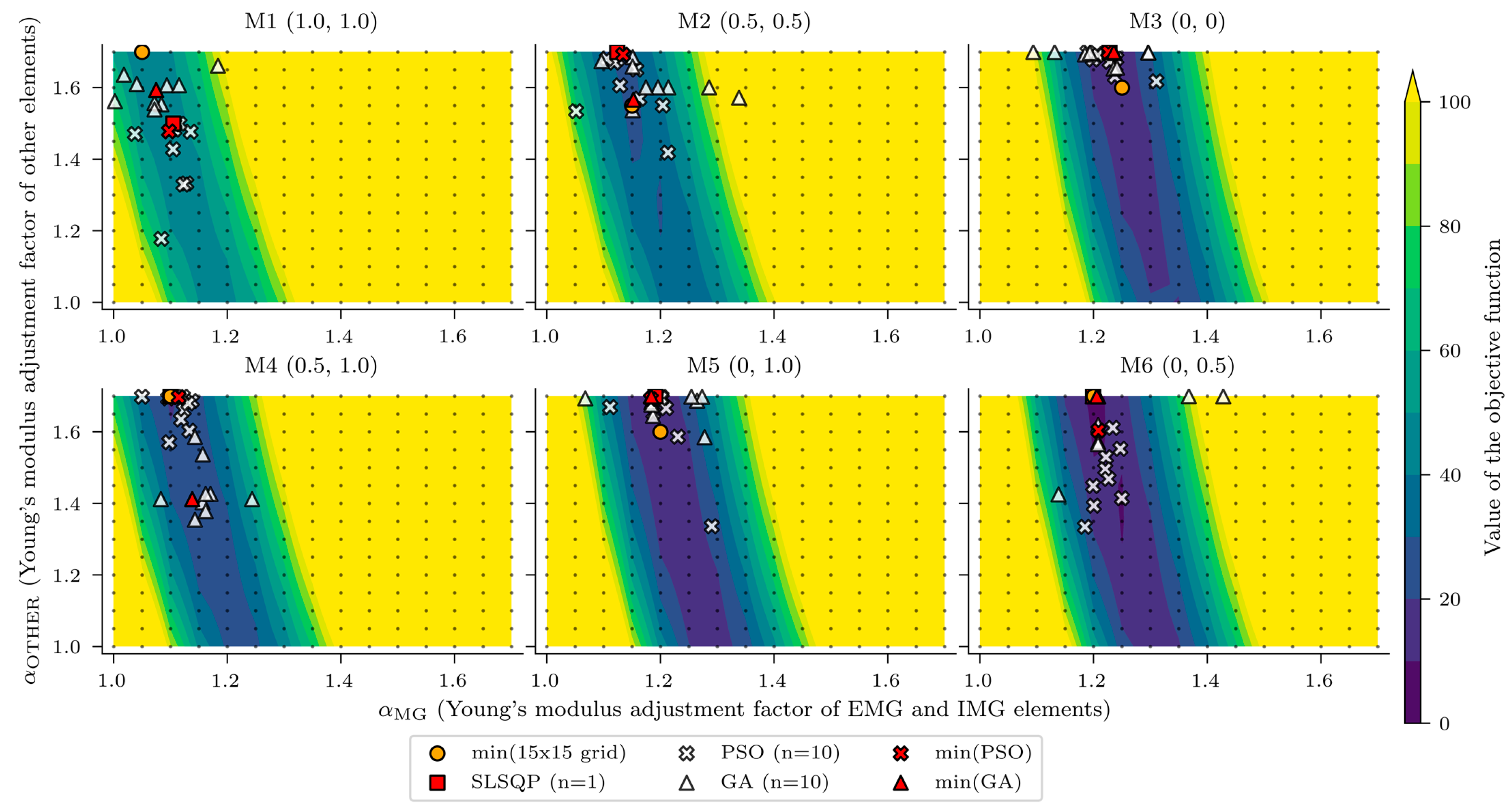
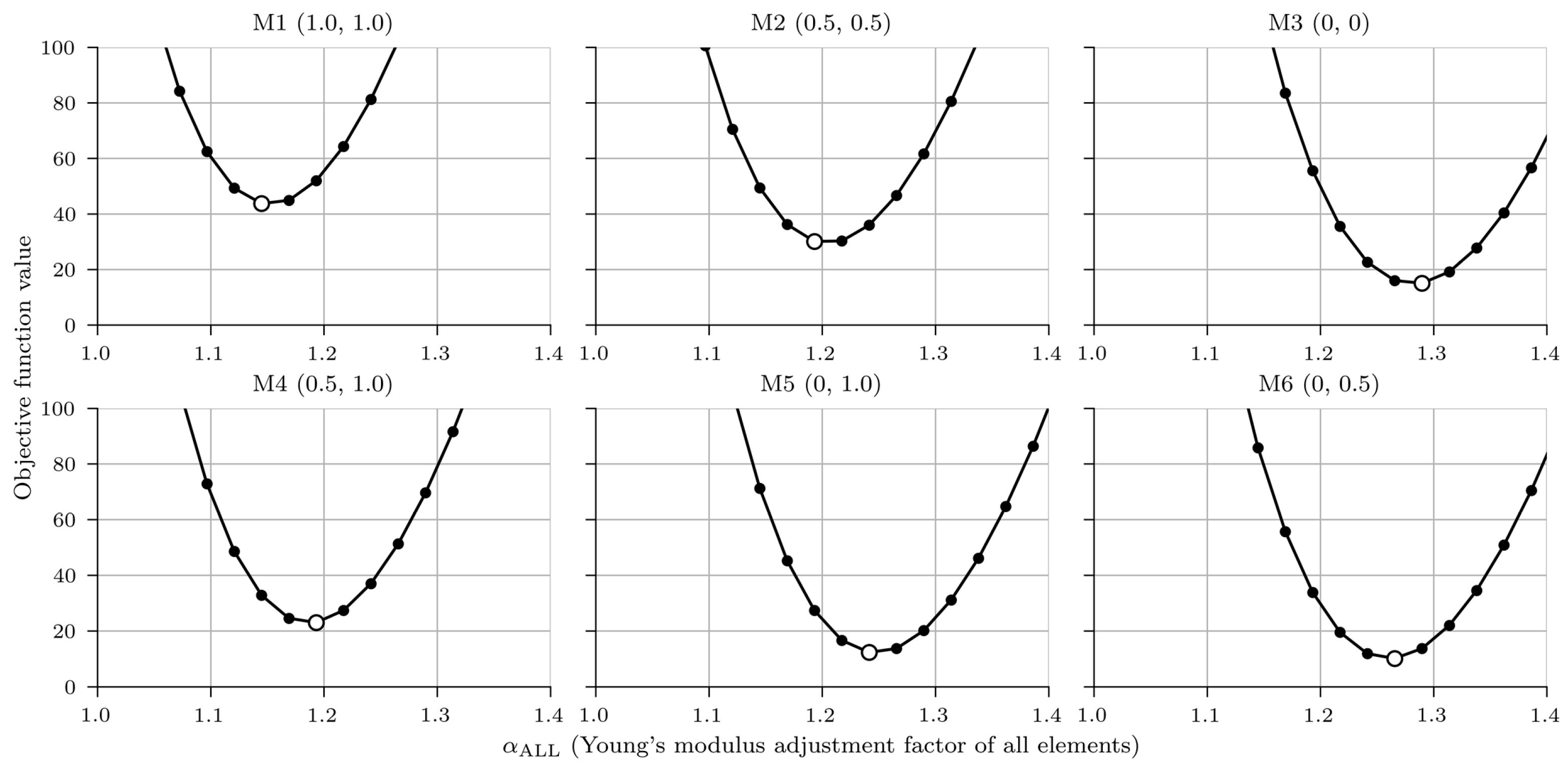
2.4.2. Manual FE Model Updating
- M1 (1.0, 1.0);
- M2 (0.5, 0.5);
- M3 (0.001 ≈ 0, 0.001 ≈ 0);
- M4 (0.5, 1.0);
- M5 (0.001 ≈ 0, 1.0);
- M6 (0.001 ≈ 0, 0.5).
2.4.3. Automatic Nonlinear Optimisation
3. Results
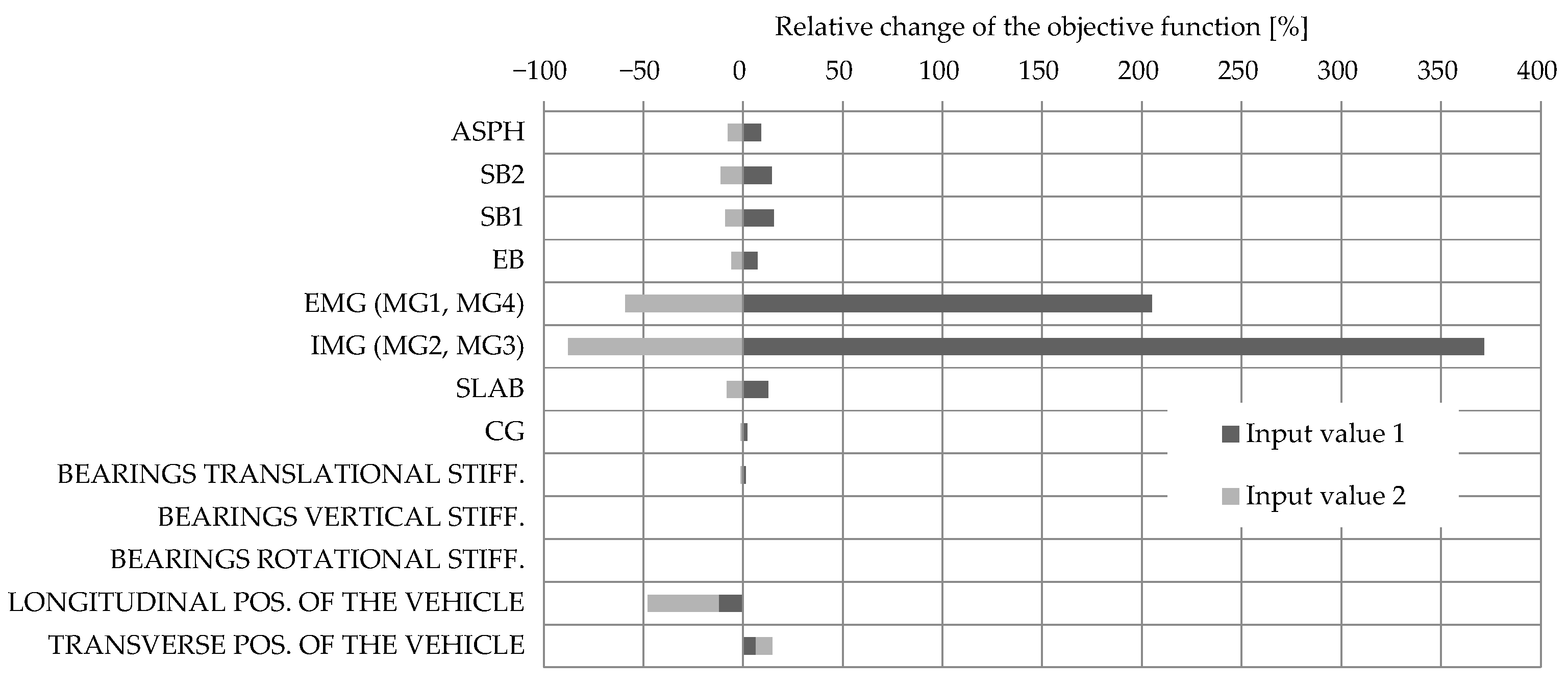
3.1. Sensitivity Study
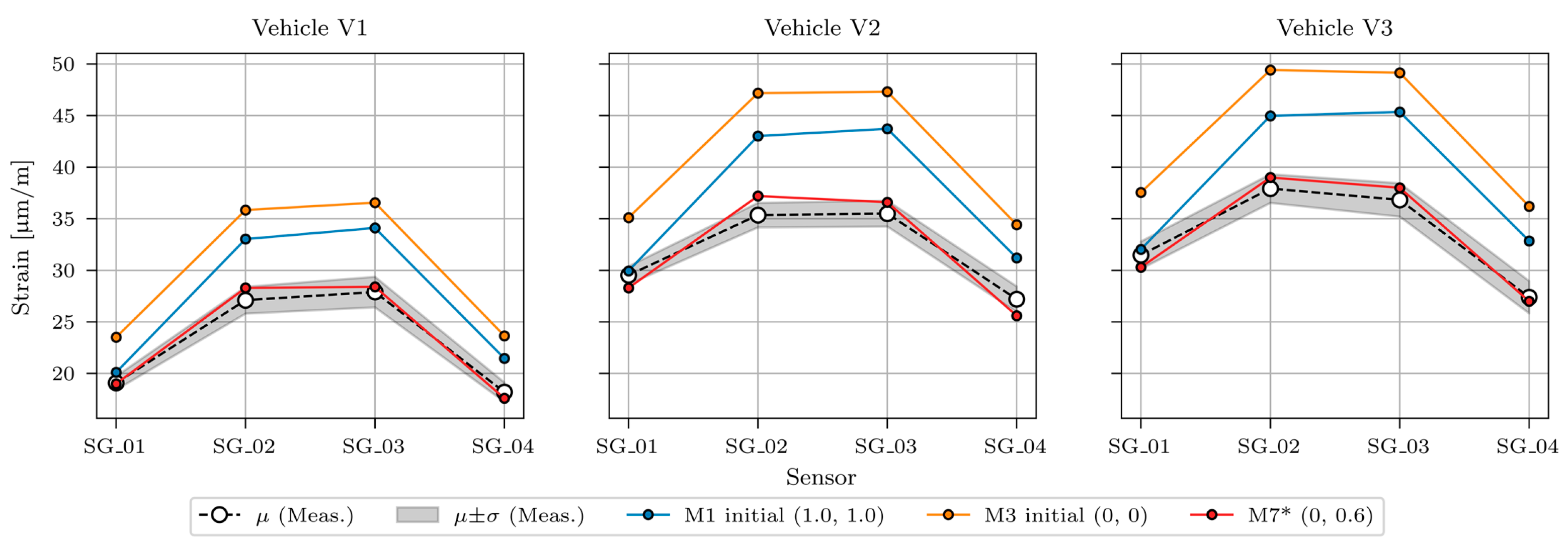
3.2. Updated FE Model
- (Young’s modulus adjustment factor of all elements);
- (SB1 anchorage reduction factor);
- (SB2 anchorage reduction factor).
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Road Freight Transport: +7% in 2021 Versus 2020—Products Eurostat News—Eurostat. Available online: https://ec.europa.eu/eurostat/en/web/products-eurostat-news/-/ddn-20220930-2 (accessed on 22 November 2022).
- EU Invests €5.4 Billion in Sustainable, Safe, and Efficient Transport Infrastructure. Available online: https://transport.ec.europa.eu/news/eu-invests-eu54-billion-sustainable-safe-and-efficient-transport-infrastructure-2022-06-29_en (accessed on 22 November 2022).
- Books, G. Climate Change 2014—Impacts, Adaptation and Vulnerability: Regional Aspects; 16AD; Cambridge University Press: Cambridge, UK, 2015; ISBN 1107058163. [Google Scholar]
- Hajdin, R.; Kušar, M.; Mašović, S.; Linneberg, P.; Amado, J.; Tanasić, N. TU1406 COST Action: Quality Specifications for Roadway Bridges, Standardization at a European Level: WG3—Technical Report: Establishment of a Quality Control Plan; Boutik: İstanbul, Turkey, 2018; ISBN 9788675182009. [Google Scholar]
- Friedland, I.M.; Ghasemi, H.; Chase, S.B. The FHWA Long-Term Bridge Performance Program; Turner Fairbank Highway Research Center: McLean, VA, USA, 2007. [Google Scholar]
- Brown, M.C.; Gomez, J.P.; Hammer, M.L.; Hooks, J.M. Long-Term Bridge Performance High Priority Bridge Performance Issues; Turner Fairbank Highway Research Center: McLean, VA, USA, 2014. [Google Scholar] [CrossRef]
- Chen, H.-P.; Ni, Y.-Q. Applications of SHM Strategies to Large Civil Structures. In Structural Health Monitoring of Large Civil Engineering Structures; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2018; pp. 267–302. ISBN 9781119166641. [Google Scholar]
- Gosliga, J.; Hester, D.; Worden, K.; Bunce, A. On Population-Based Structural Health Monitoring for Bridges. Mech. Syst. Signal Process. 2022, 173, 108919. [Google Scholar] [CrossRef]
- Moses, F. Weigh-in-Motion System Using Instrumented Bridges. J. Transp. Eng. 1979, 105, 233–249. [Google Scholar] [CrossRef]
- Žnidarič, A.; Kalin, J. Using Bridge Weigh-in-Motion Systems to Monitor Single-Span Bridge Influence Lines. J. Civ. Struct. Health Monit. 2020, 10, 743–756. [Google Scholar] [CrossRef]
- Tran-Ngoc, H.; Khatir, S.; De Roeck, G.; Bui-Tien, T.; Nguyen-Ngoc, L.; Abdel Wahab, M. Model Updating for Nam O Bridge Using Particle Swarm Optimization Algorithm and Genetic Algorithm. Sensors 2018, 18, 4131. [Google Scholar] [CrossRef] [PubMed]
- Schlune, H.; PLoS, M.; Gylltoft, K. Improved Bridge Evaluation through Finite Element Model Updating Using Static and Dynamic Measurements. Eng. Struct. 2009, 31, 1477–1485. [Google Scholar] [CrossRef]
- Jaishi, B.; Ren, W.-X. Structural Finite Element Model Updating Using Ambient Vibration Test Results. J. Struct. Eng. 2005, 131, 617–628. [Google Scholar] [CrossRef]
- Ribeiro, D.; Calçada, R.; Delgado, R.; Brehm, M.; Zabel, V. Finite Element Model Updating of a Bowstring-Arch Railway Bridge Based on Experimental Modal Parameters. Eng. Struct. 2012, 40, 413–435. [Google Scholar] [CrossRef]
- Giordano, P.F.; Limongelli, M.P. Response-Based Time-Invariant Methods for Damage Localization on a Concrete Bridge. Struct. Concr. 2020, 21, 1254–1271. [Google Scholar] [CrossRef]
- Unger, J.F.; Teughels, A.; De Roeck, G. Damage Detection of a Prestressed Concrete Beam Using Modal Strains. J. Struct. Eng. 2005, 131, 1456–1463. [Google Scholar] [CrossRef]
- Anastasopoulos, D.; De Smedt, M.; Vandewalle, L.; De Roeck, G.; Reynders, E.P.B. Damage Identification Using Modal Strains Identified from Operational Fiber-Optic Bragg Grating Data. Struct. Health Monit. 2018, 17, 1441–1459. [Google Scholar] [CrossRef]
- Anastasopoulos, D.; De Roeck, G.; Reynders, E.P.B. Influence of Damage versus Temperature on Modal Strains and Neutral Axis Positions of Beam-like Structures. Mech. Syst. Signal Process. 2019, 134, 106311. [Google Scholar] [CrossRef]
- Brincker, R.; Ventura, C. Introduction to Operational Modal Analysis; Wiley & Sons: New York, NY, USA, 2015; ISBN 9781119963158. [Google Scholar]
- Rainieri, C.; Fabbrocino, G. Operational Modal Analysis of Civil Engineering Structures. In An Introduction and a Guide for Applications; Springer International Publishing: Cham, Switzerland, 2014; ISBN 978-1-4939-0767-0. [Google Scholar]
- Solís, M.; He, L.; Lombaert, G.; De Roeck, G. Finite Element Model Updating of a Footbridge Based on Static and Dynamic Measurements. In Proceedings of the ECCOMAS Thematic Conference—COMPDYN 2013: 4th International Conference on Computational Methods in Structural Dynamics and Earthquake Engineering, Proceedings—An IACM Special Interest Conference, Kos Island, Greece, 12–14 June 2013; pp. 1432–1449. [Google Scholar] [CrossRef]
- Anžlin, A.; Hekič, D.; Kalin, J.; Kosič, M.; Ralbovsky, M.; Lachinger, S. Deliverable D 3.3: Improved Fatigue Consumption Assessment through Structural and on-Board Monitoring; European Comission (grant agreement no. 826250 Assets4Rail): Brussels, Belgium, 2020. [Google Scholar]
- Recommendations on the Use of Soft, Diagnostic and Proof Load Testing. European Commission. 2009. Available online: https://arches.fehrl.org (accessed on 13 December 2022).
- Felber, A. Development of a Hybrid Bridge Evaluation System. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 1994. [Google Scholar]
- Old Pictures or How Everything Changes (in Slovene). Available online: https://stareslike.cerknica.org/2019/06/18/1971-ravbarkomanda-viadukt/ (accessed on 1 December 2022).
- Pavšič, G. Ravbarkomanda Viaduct: 45 Years Ago, There Was a Construction Project That Relieved the Locals (in Slovene). Available online: https://siol.net/avtomoto/promet/viadukt-ravbarkomanda-pred-45-leti-je-bil-gradbeni-podvig-ki-je-razbremenil-domacine-442526 (accessed on 1 December 2022).
- Kolias, B. Eurocode 8—Part 2. Seismic Design of Bridges. In Eurocodes: Background and Applications Workshop, February, Brussels; Joint Research Centre: Brussels, Belgium, 2008. [Google Scholar]
- Anzlin, A.; Fischinger, M.; Isakovic, T. Cyclic Response of I-Shaped Bridge Columns with Substandard Transverse Reinforcement. Eng. Struct. 2015, 99, 642–652. [Google Scholar] [CrossRef]
- Anžlin, A.; Bohinc, U.; Hekič, D.; Kreslin, M.; Kalin, J.; Žnidarič, A. Comprehensive Permanent Remote Monitoring System of a Multi-Span Highway Bridge. In Proceedings of the Construction Materials for a Sustainable Future: Proceedings of the 2nd International Conference CoMS 2020/21, Online Conference, 20–21 April 2021; Šajna, A., Legat, A., Jordan, S., Horvat, P., Kemperle, E., Dolenec, S., Ljubešek, M., Michelizza, M., Eds.; Slovenian National Building and Civil Engineering Institute: Ljubljana, Slovenia, 2021; pp. 13–20. [Google Scholar]
- Cantero, D.; González, A. Bridge Damage Detection Using Weigh-in-Motion Technology. J. Bridg. Eng. 2015, 20, 04014078. [Google Scholar] [CrossRef]
- Wang, H.; Li, A.; Li, J. Progressive Finite Element Model Calibration of a Long-Span Suspension Bridge Based on Ambient Vibration and Static Measurements. Eng. Struct. 2010, 32, 2546–2556. [Google Scholar] [CrossRef]
- Cury, A.; Crémona, C. Assignment of Structural Behaviours in Long-Term Monitoring: Application to a Strengthened Railway Bridge. Struct. Health Monit. 2012, 11, 422–441. [Google Scholar] [CrossRef]
- Meixedo, A.; Ribeiro, D.; Santos, J.; Calçada, R.; Todd, M. Progressive Numerical Model Validation of a Bowstring-Arch Railway Bridge Based on a Structural Health Monitoring System. J. Civ. Struct. Health Monit. 2021, 11, 421–449. [Google Scholar] [CrossRef]
- Sousa Tomé, E.; Pimentel, M.; Figueiras, J. Structural Response of a Concrete Cable-Stayed Bridge under Thermal Loads. Eng. Struct. 2018, 176, 652–672. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L.; Tan, G.; Cheng, Y. Effective Prestressing Force Testing Method of External Prestressed Bridge Based on Frequency Method. Appl. Mech. Mater. 2013, 303–306, 363–366. [Google Scholar] [CrossRef]
- Kalin, J.; Žnidarič, A.; Anžlin, A.; Kreslin, M. Measurements of Bridge Dynamic Amplification Factor Using Bridge Weigh-in-Motion Data. Struct. Infrastruct. Eng. 2021, 18, 1164–1176. [Google Scholar] [CrossRef]
- Kirkegaard, P.H.; Neilsen, S.R.K.; Enevoldsen, I. Heavy Vehicles on Minor Highway Bridges—Calculation of Dynamic Impact Factors from Selected Crossing Scenarios; Department of Building Technology and Structural Engineering, Aalborg University: Aalborg, Denmark, 1997. [Google Scholar]
- Nassif, H.H.; Nowak, A.S. Dynamic Load for Girder Bridges under Normal Traffic. Arch. Civ. Eng. 1996, 42, 381–400. [Google Scholar]
- Nielsen, S.R.K.; Kirkegaard, P.H.; Enevoldsen, I. Dynamic Vehicle Impact for Safety Assessment of Bridge; Structural Reliability Theory Paper No. 173; Dept. of Building Technology and Structural Engineering: Trondheim, Norway, 1998; ISSN 1395-7953-R9810. [Google Scholar]
- Gonzales, A.; Žnidarič, A.; Casas, J.R.; Enright, B.; OBrien, E.J.; Lavrič, I.; Kalin, J. Report D10: Recommendations on Dynamic Amplification Allowance, ARCHES D10 Report; FEHRL: Brussels, Belgium, 2009. [Google Scholar]
- AUTODESK AUTOCAD 2023. Available online: https://www.autodesk.com/products/autocad/features (accessed on 1 December 2022).
- DASSAULT SYSTEMS. Abaqus performance data. Available online: https://www.3ds.com/support/hardware-and-software/simulia-system-information/abaqus-2016/performance-data/ (accessed on 1 December 2022).
- VA0174 Ravbarkomanda Viaduct Rehabilitation Plan (in Slovene): Notebook 3/1. 1-General Part, Technical Part; Promico d.o.o.: Ljubljana, Slovenia, 2019. [Google Scholar]
- Technical Report about the General Project of the Ravbarkomanda Viaduct (in Slovene); Tehnogradnja Maribor: Maribor, Slovenia, 1970.
- Lachinger, S.; Ralbovsky, M.; Vorwagner, A.; Hekič, D.; Kosič, M.; Anžlin, A. Numerical Calibration of Railway Bridge Based on Measurement Data. In Proceedings of the IABSE Congress. Ghent 2021 (Structural Engineering for Future Societal Needs), Ghent, Belgium, 22–24 September 2021. [Google Scholar] [CrossRef]
- Kumer, N.; Kreslin, M.; Bohinc, U.; Brank, B. Numerična Ocena Dinamičnih Karakteristik Viadukta Ravbarkomanda = Numerical Evaluation of Dynamic Characteristics of the Ravbarkomanda Viaduct. Gradb. Vestn. 2021, 70, 272–281. [Google Scholar]
- Kochenderfer, M.J.; Wheeler, T.A. Algorithms for Optimization; The MIT Press: Cambridge, MA, USA, 2019; ISBN 0262039427. [Google Scholar]
- Civera, M.; Pecorelli, M.L.; Ceravolo, R.; Surace, C.; Zanotti Fragonara, L. A Multi-Objective Genetic Algorithm Strategy for Robust Optimal Sensor Placement. Comput. Civ. Infrastruct. Eng. 2021, 36, 1185–1202. [Google Scholar] [CrossRef]
- Kraft, D. A Software Package for Sequential Quadratic Programming; Weissling: Petershausen, Germany, 1988. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Blank, J.; Deb, K. Pymoo: Multi-Objective Optimization in Python. IEEE Access 2020, 8, 89497–89509. [Google Scholar] [CrossRef]
- Ansys. Ansys Mechanical. Available online: https://www.ansys.com/products/structures/ansys-mechanical (accessed on 1 December 2022).
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. {SciPy} 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1st Axle | 2nd Axle | 3rd Axle | 4th Axle | 5th Axle | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Vehicle | Load [kN] | Spacing [m] | Load [kN] | Spacing [m] | Load [kN] | Spacing [m] | Load [kN] | Spacing [m] | Load [kN] | GVW [kN] |
| V1 | 67.69 | 3.30 | 85.35 | 1.35 | 88.29 | / | / | / | / | 241.33 |
| V2 | 68.67 | 3.60 | 93.20 | 5.60 | 76.52 | 1.30 | 75.54 | 1.30 | 76.52 | 390.44 |
| V3 | 68.67 | 3.30 | 87.31 | 1.35 | 87.31 | 5.17 | 76.52 | 1.33 | 76.52 | 396.32 |
| n, μ [μm/m], σ [μm/m], CV [%] | V1 | V2 | V3 | |
|---|---|---|---|---|
| SG_01 | n | 32 | 34 | 36 |
| μ | 19.1 | 29.5 | 31.5 | |
| σ | 0.7 | 0.9 | 1.3 | |
| CV | 3.5 | 2.9 | 4.2 | |
| SG_02 | n | 48 | 51 | 54 |
| μ | 27.1 | 35.4 | 37.9 | |
| σ | 1.3 | 1.2 | 1.4 | |
| CV | 4.8 | 3.4 | 3.7 | |
| SG_03 | n | 48 | 51 | 54 |
| μ | 27.9 | 35.5 | 36.8 | |
| σ | 1.5 | 1.3 | 1.6 | |
| CV | 5.3 | 3.5 | 4.4 | |
| SG_04 | n | 48 | 51 | 54 |
| μ | 18.2 | 27.2 | 27.4 | |
| σ | 0.9 | 1.2 | 1.6 | |
| CV | 5.2 | 4.6 | 5.7 | |
| Element | Abbreviation | Young’s Modulus [GPa] | Poisson Ratio |
|---|---|---|---|
| Slab | SLAB | 33 | 0.20 |
| External main girder | EMG (MG1, MG4) | 35 | 0.20 |
| Internal main girder | IMG (MG2, MG3) | 34 | 0.20 |
| Cross girder | CG | 35 | 0.20 |
| Safety barrier 1 | SB1 | 33 | 0.20 |
| Safety barrier 2 | SB2 | 33 | 0.20 |
| Edge beam | EB | 33 | 0.20 |
| Asphalt | ASPH | 8 | 0.35 |
| Element | Abbreviation | Translational Stiffness [kN/m] | Vertical Stiffness [kN/m] | Rotational Stiffness [kNm] |
|---|---|---|---|---|
| Bearing type “A” | BEAR_A | 3.10 × 103 | 1.08 × 106 | 3.09 × 103 |
| Bearing type “B” | BEAR_B | 2.43 × 103 | 8.43 × 105 | 2.32 × 103 |
| Bearing type “C” | BEAR_C | 3.72 × 103 | 1.56 × 106 | 7.32 × 103 |
| Bearing type “D” | BEAR_D | 2.92 × 103 | 1.22 × 106 | 5.49 × 103 |
| Element/Variable/Property | Input Value 1 1 | Input Value 2 1 | Description |
|---|---|---|---|
| ASPH, SB1, SB2, EB, EMG (MG1, MG4), IMG (MG2, MG3), SLAB, CG | 0.75 × design | 1.25 × design | Young’s modulus change |
| BEARINGS TRANSL. STIFF. | 0.75 × design | 1.25 × design | Horizontal (X and Y) stiffness change |
| BEARINGS VERT. STIFF. | 0.75 × design | 1.25 × design | Vertical (Z) stiffness change |
| BEARINGS ROT. STIFF. | 0.75 × design | 1.25 × design | Rot. (around Y) stiffness change |
| LONGIT. POS. OF THE VEHICLE 2 | 21.95 m – 1 m | 21.95 m + 1 m | Longitudinal position change |
| TRANSV. POS. OF THE VEHICLE 3 | 3.77 m – 0.1 m | 3.77 m + 0.1 m | Transverse position change |
| Model | SLSQP | PSO | GA | |||
|---|---|---|---|---|---|---|
| EMG and IMG Elements | Other Elements | EMG and IMG Elements | Other Elements | EMG and IMG Elements | Other Elements | |
| M1 | 1.10 | 1.50 | 1.10 | 1.48 | 1.07 | 1.59 |
| M2 | 1.12 | 1.70 | 1.13 | 1.69 | 1.15 | 1.57 |
| M3 | 1.23 | 1.70 | 1.23 | 1.70 | 1.24 | 1.70 |
| M4 | 1.10 | 1.70 | 1.11 | 1.70 | 1.14 | 1.41 |
| M5 | 1.19 | 1.70 | 1.18 | 1.69 | 1.18 | 1.70 |
| M6 | 1.20 | 1.70 | 1.21 | 1.60 | 1.21 | 1.70 |
| M1 | M2 | M3 | M4 | M5 | M6 | |
|---|---|---|---|---|---|---|
| The minimum objective function value | 43.77 | 30.13 | 15.09 | 23.05 | 12.36 | 10.17 |
| 1.14 | 1.19 | 1.29 | 1.19 | 1.24 | 1.27 |
| SLSQP | PSO | GA | |
|---|---|---|---|
| Value of the objective function | 10.23 | 14.51 | 10.83 |
| (Young’s modulus adjustment factor of all elements) | 1.25 | 1.24 | 1.23 |
| (SB1 anchorage reduction factor) | 0.00 | 0.12 | 0.19 |
| (SB2 anchorage reduction factor) | 0.56 | 0.90 | 0.69 |
| 0.00 | 0.15 | 0.23 | |
| 0.70 | 1.12 | 0.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hekič, D.; Anžlin, A.; Kreslin, M.; Žnidarič, A.; Češarek, P. Model Updating Concept Using Bridge Weigh-in-Motion Data. Sensors 2023, 23, 2067. https://doi.org/10.3390/s23042067
Hekič D, Anžlin A, Kreslin M, Žnidarič A, Češarek P. Model Updating Concept Using Bridge Weigh-in-Motion Data. Sensors. 2023; 23(4):2067. https://doi.org/10.3390/s23042067
Chicago/Turabian StyleHekič, Doron, Andrej Anžlin, Maja Kreslin, Aleš Žnidarič, and Peter Češarek. 2023. "Model Updating Concept Using Bridge Weigh-in-Motion Data" Sensors 23, no. 4: 2067. https://doi.org/10.3390/s23042067
APA StyleHekič, D., Anžlin, A., Kreslin, M., Žnidarič, A., & Češarek, P. (2023). Model Updating Concept Using Bridge Weigh-in-Motion Data. Sensors, 23(4), 2067. https://doi.org/10.3390/s23042067