
Precision Landing Tests of Tethered Multicopter and VTOL UAV on Moving Landing Pad on a Lake
 , , , , , and
, , , , , and
Abstract
1. Introduction
Current Advances in Related Research
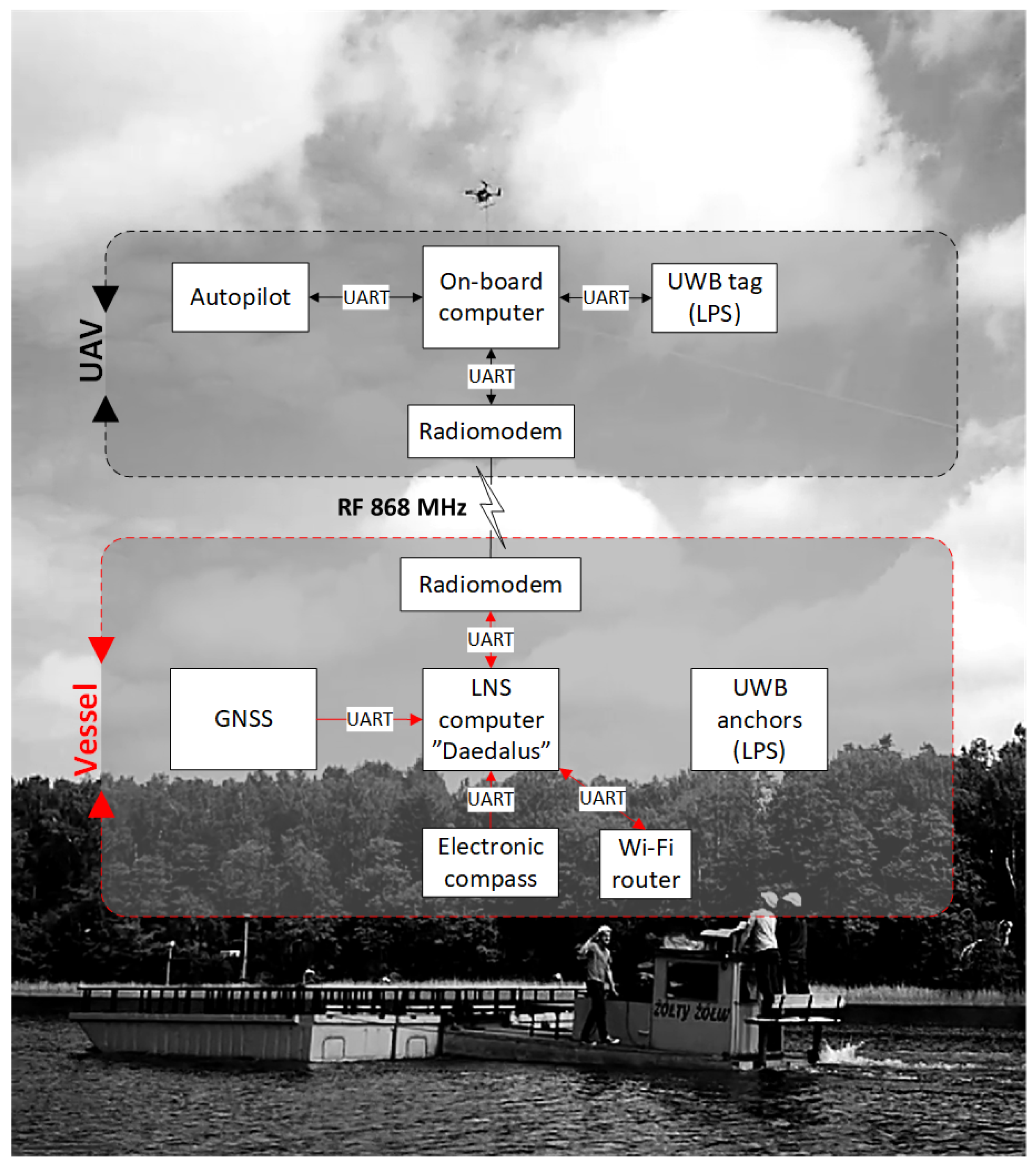
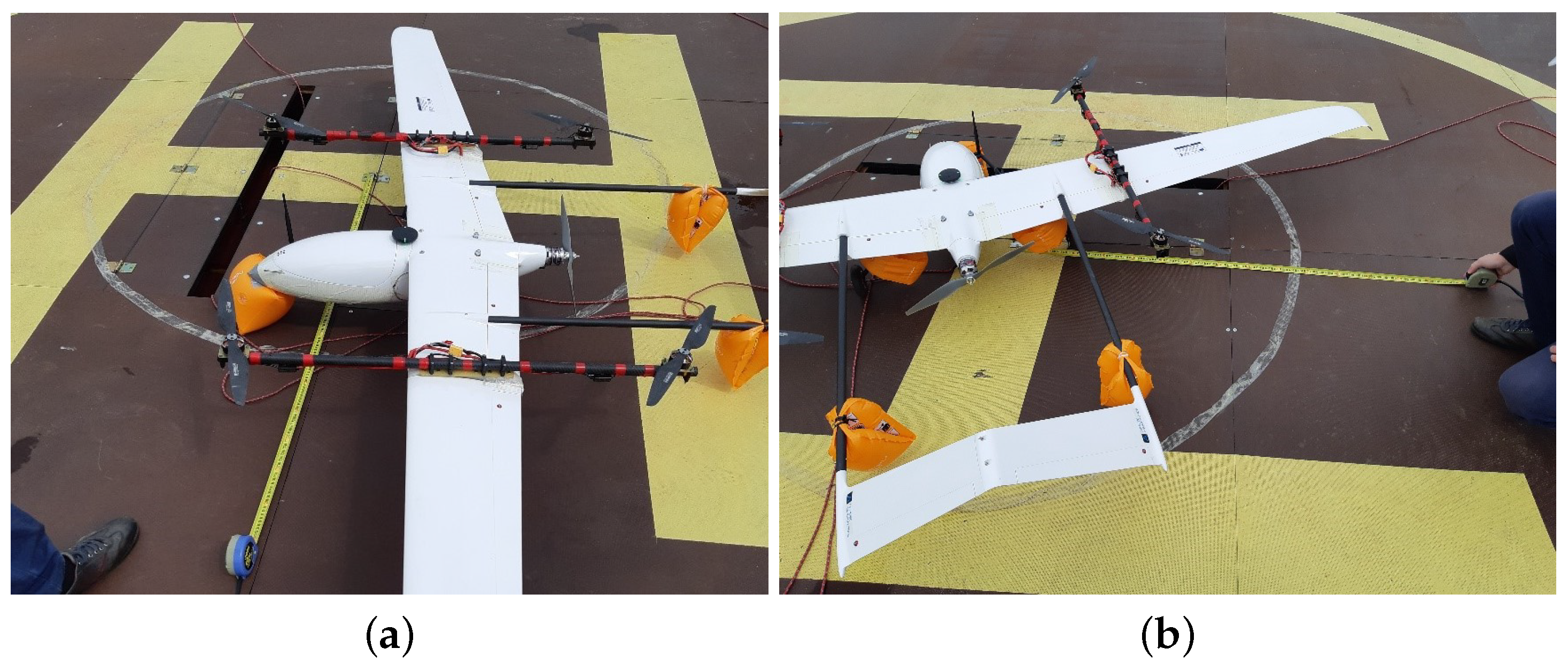
2. Architecture of UAV Systems
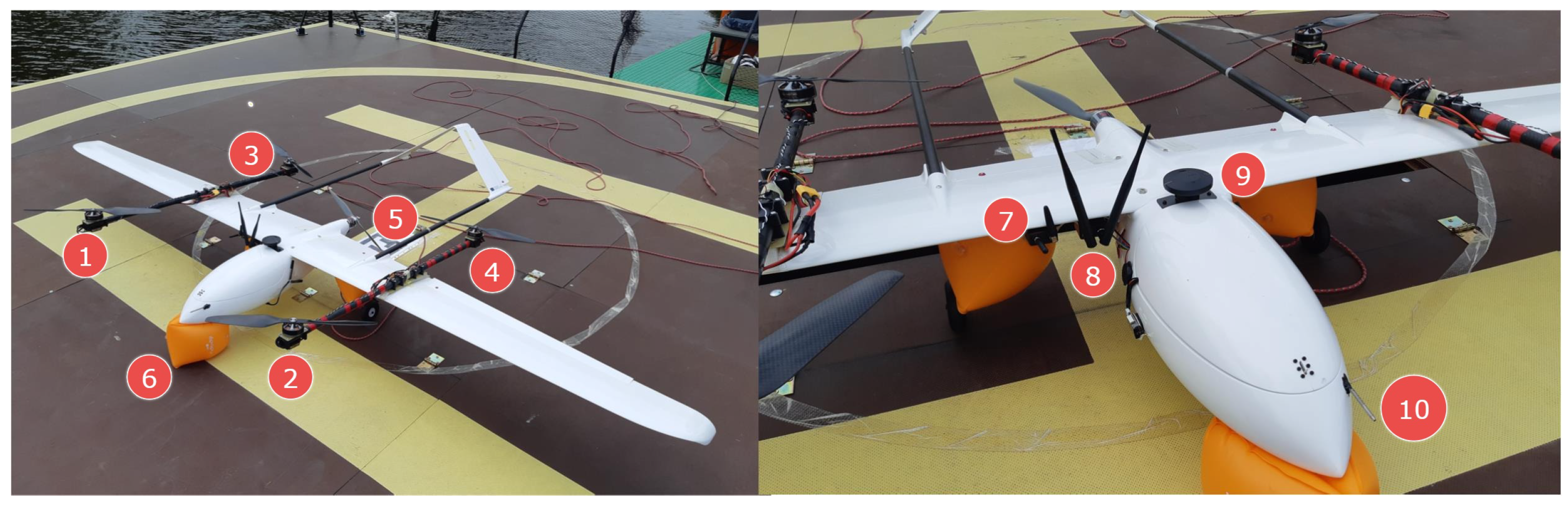
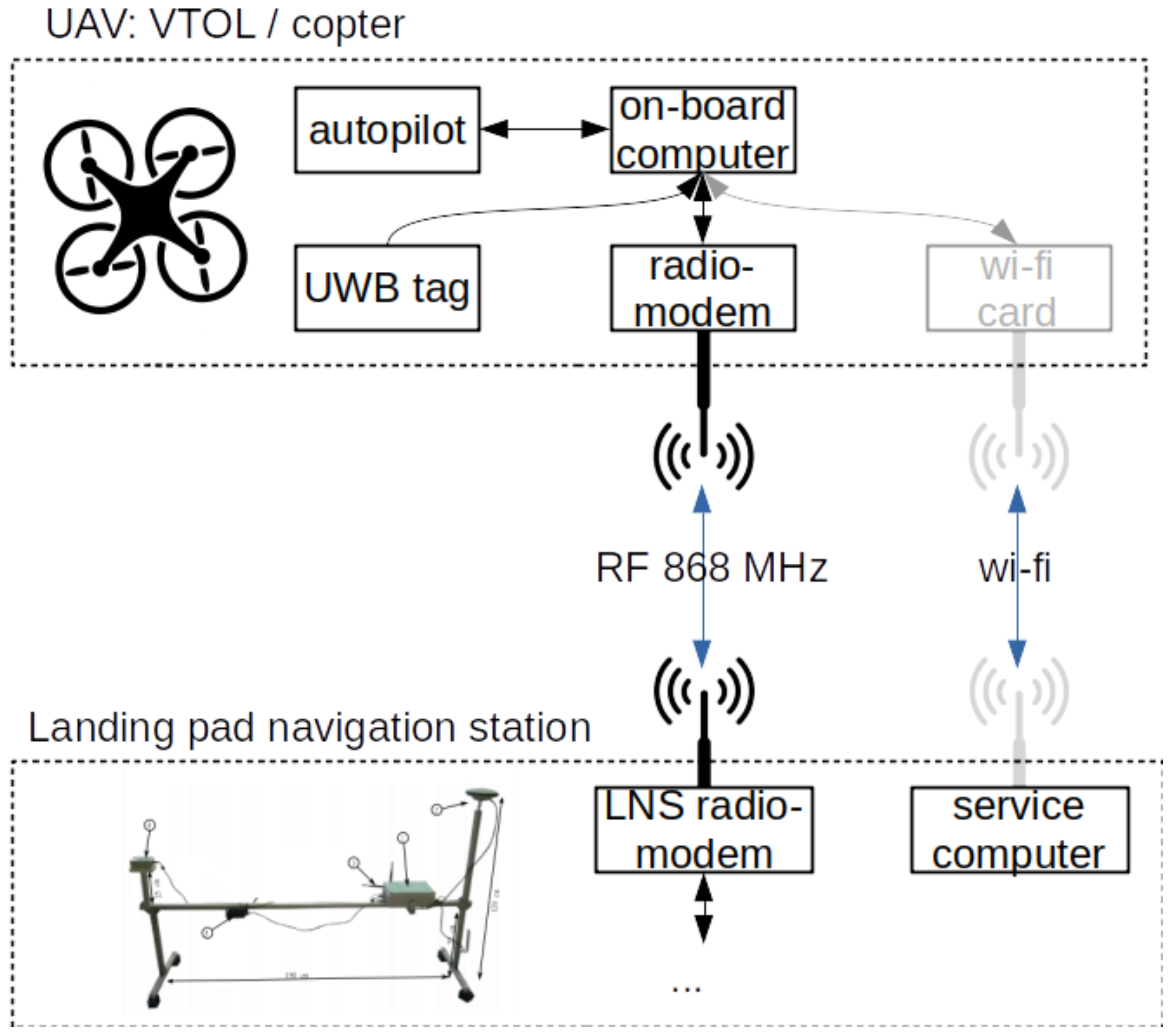
2.1. VTOL UAV
2.2. Tethered Multicopter
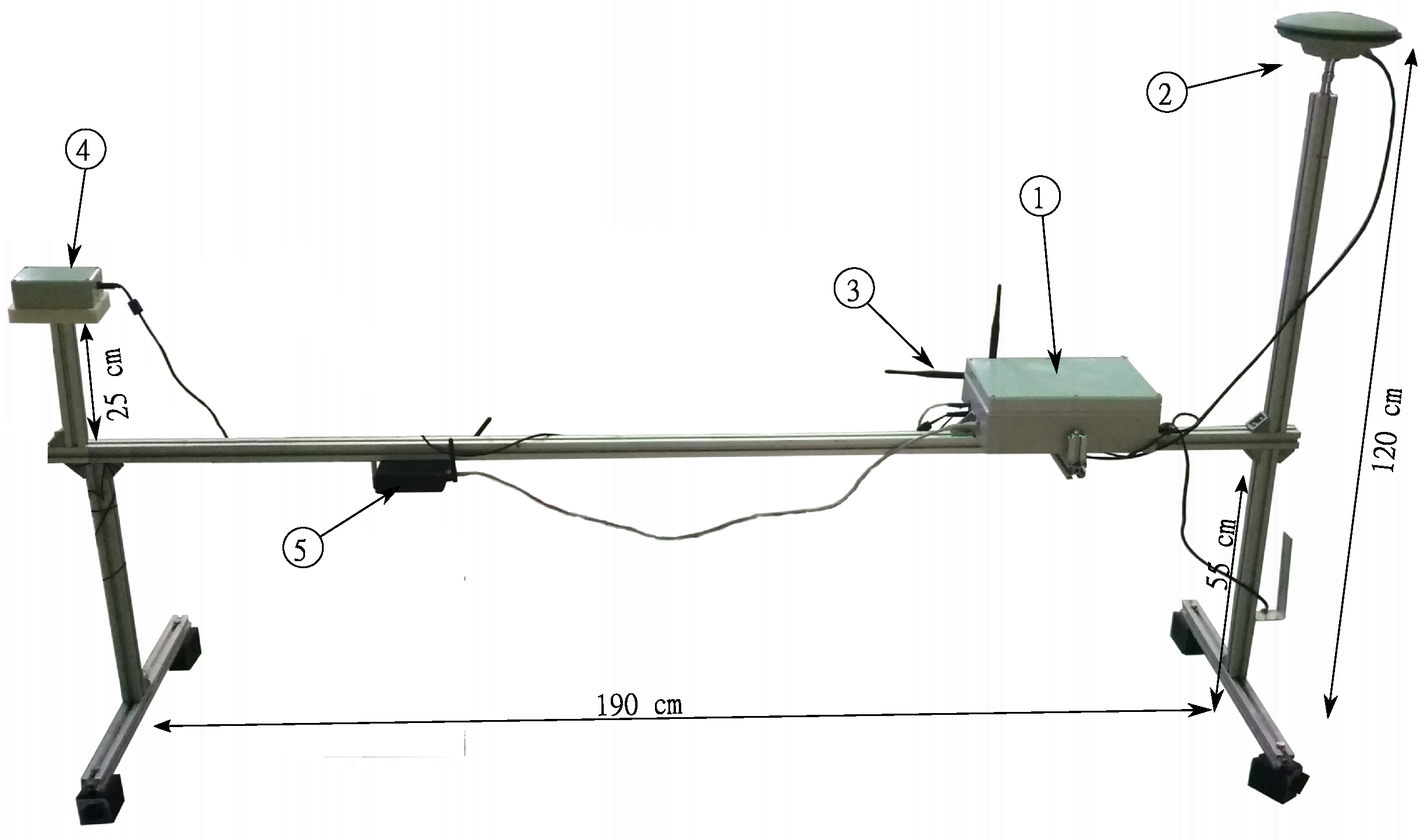
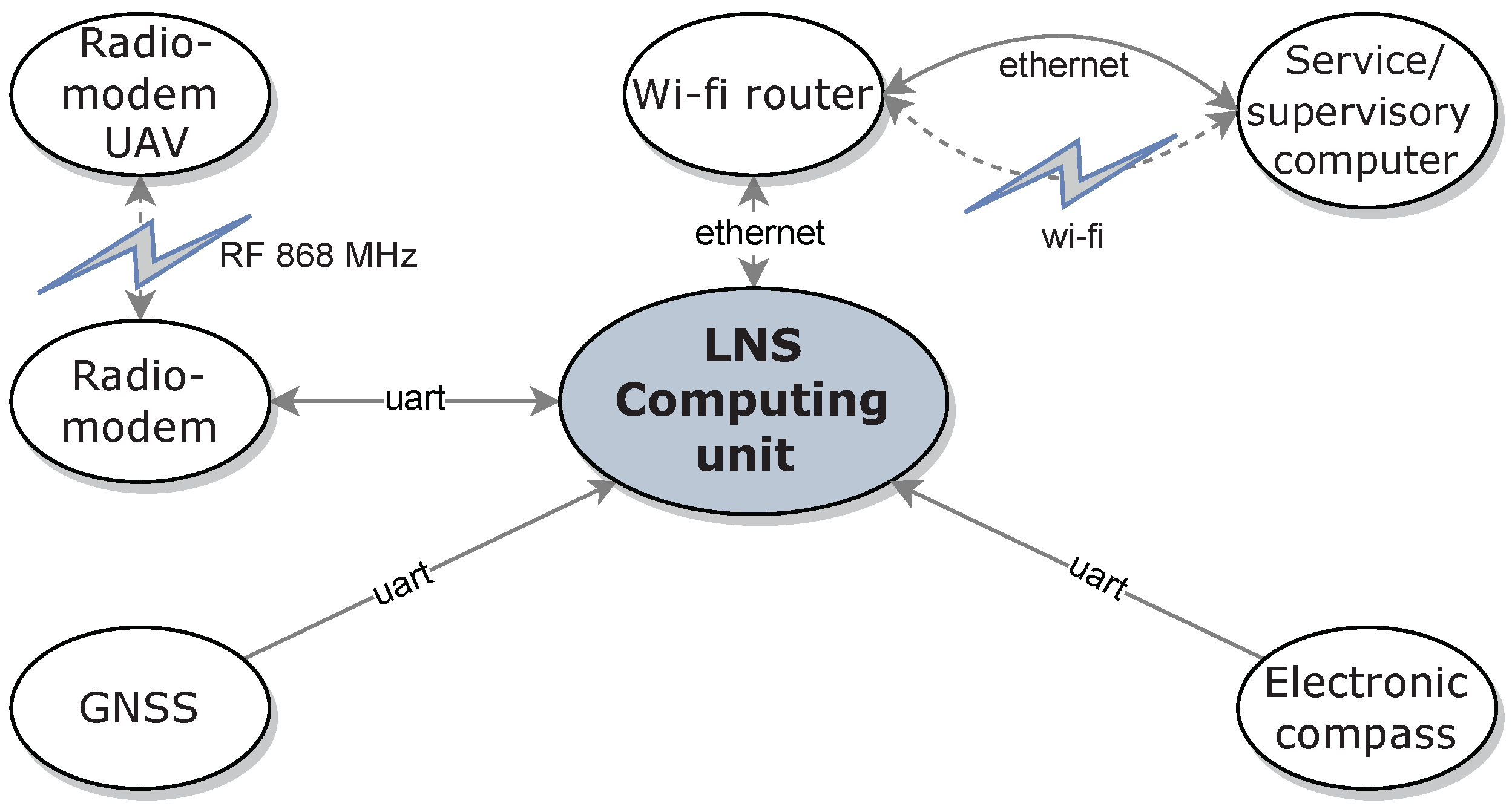
2.3. Landing Pad Navigational Station
2.4. Onboard Computer and Onboard System Structure
- Communication_node—This node is responsible for passing the Mavlink datastream from the ground station up to the autopilot and from the autopilot downstream to the ground station. The node retrieves the status and position information from the autopilot and publishes them in appropriate topics. Furthermore, the target position command and the GNSS position of the ground station are extracted from the upstream, then filtered and published. Finally, the node injects Mavlink commands issued by the commander node into the upstream link to facilitate the control of the position of the UAV relative to the landing pad.
- Commander_node—This program implements the relative position navigation algorithm and computes the Mavlink commands to be sent to the autopilot. The commands are calculated based on the desired target position and the estimated position of the UAV relative to the base.
- Relative_position_node—This node computes the position of the UAV relative to the base according to the GNSS sensor data. Because the GNSS sensor only provides coordinates and not the orientation of the frames, additional transformation is needed to extract the full pose.
- Fusion_filter_node—This node implements a Kalman filter to achieve the sensor fusion of the positioning information from the GNSS and the local positioning system (UWB).
- UWB_node—This node communicates with the onboard UWB system tag to provide position information from the local position system mounted on the moving platform.
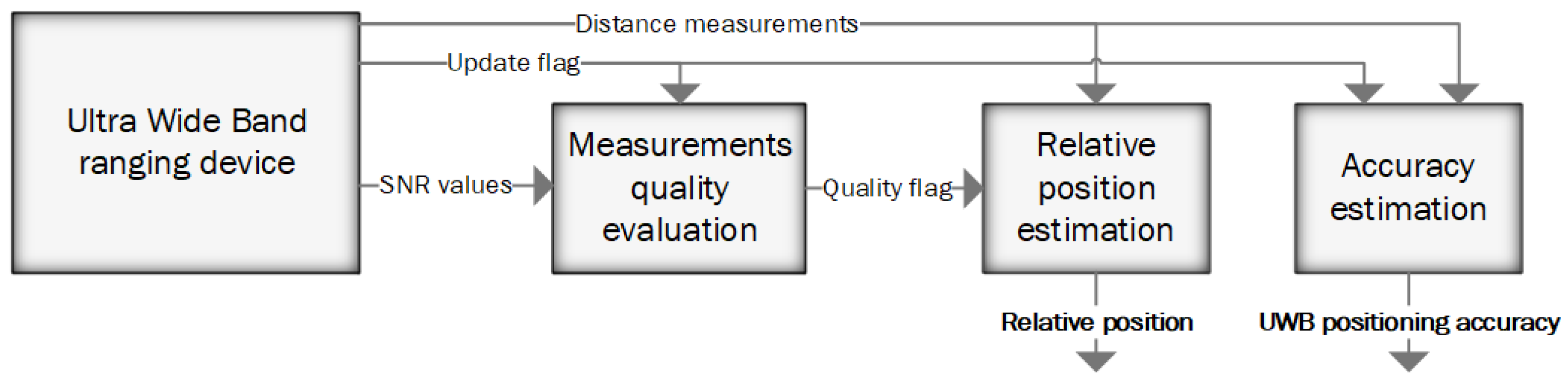
2.5. UWB Positioning System
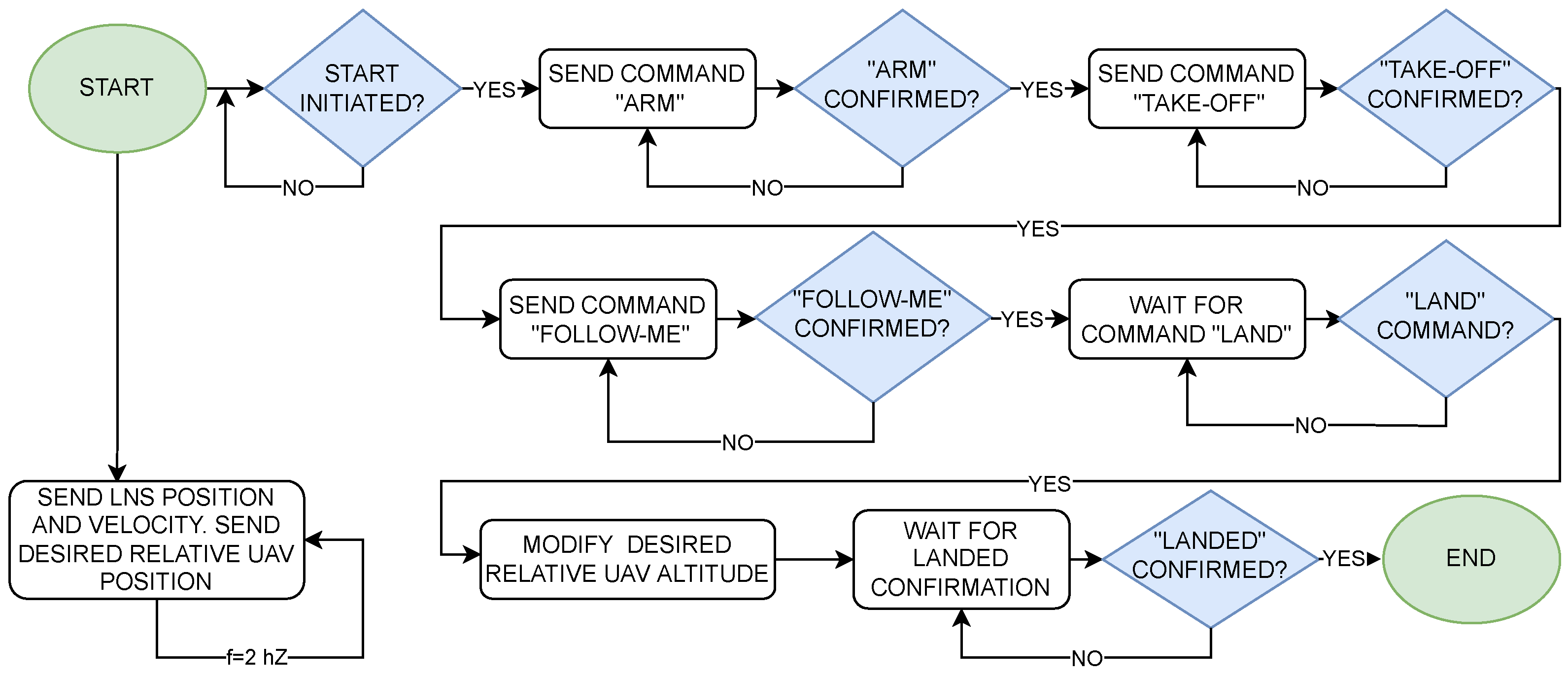
3. Algorithm of Take-Off, Following, and Precision Landing on a Moving Landing Pad
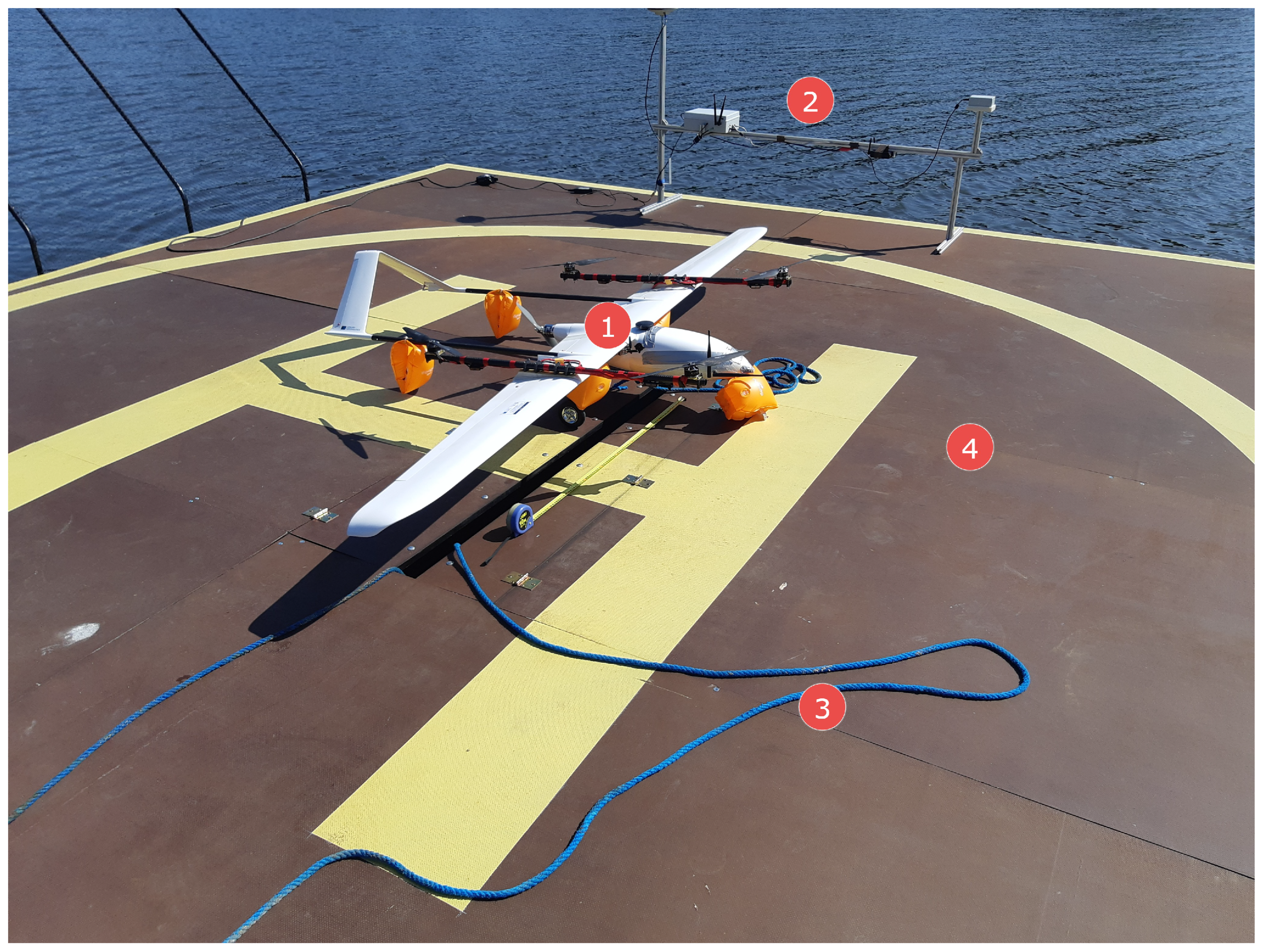
4. Tests on Mobile Landing Pad Moving on a Lake
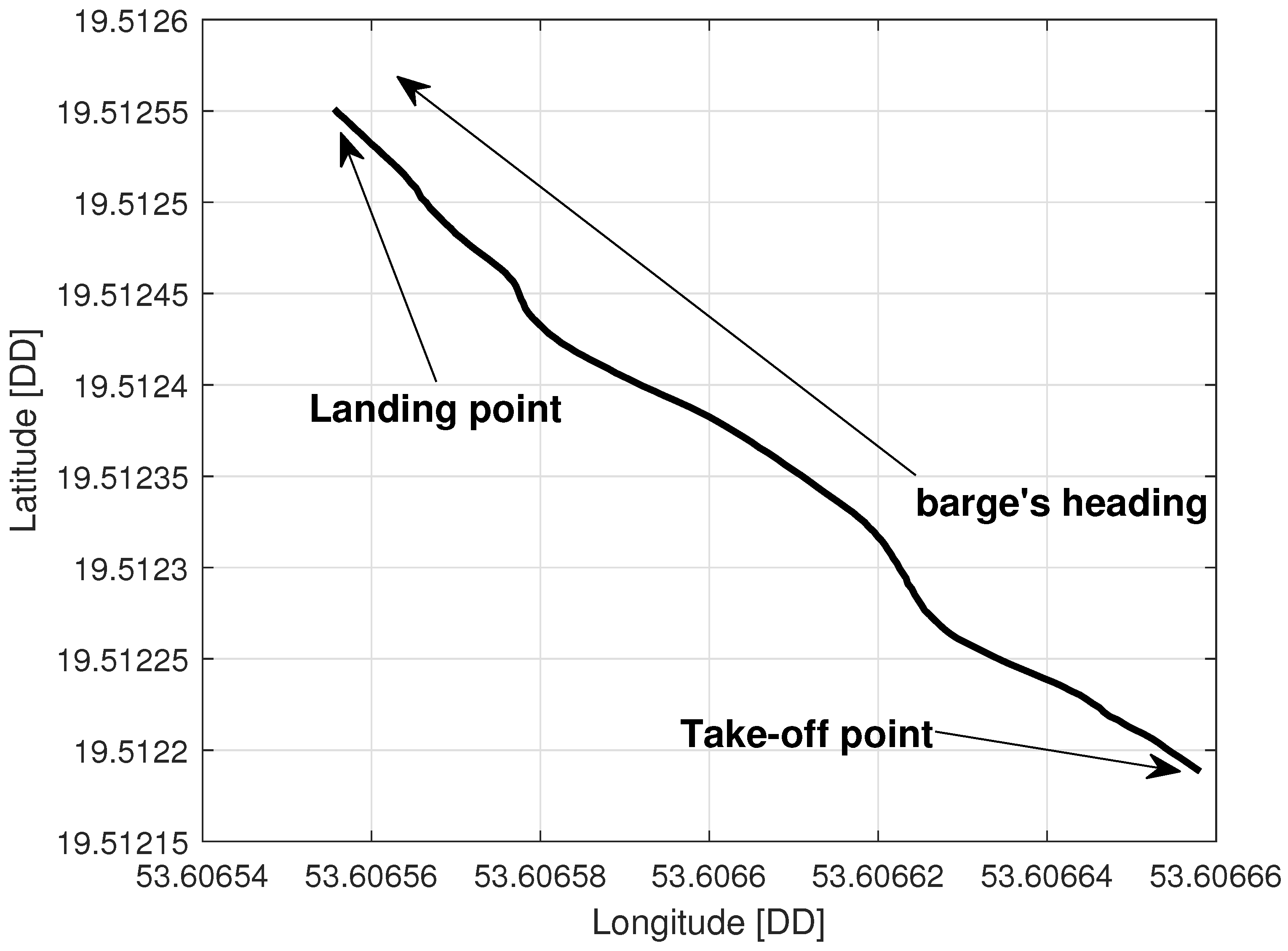
- Automatic vertical take-off in MC mode from the barge’s deck once it achieved its maximum speed,
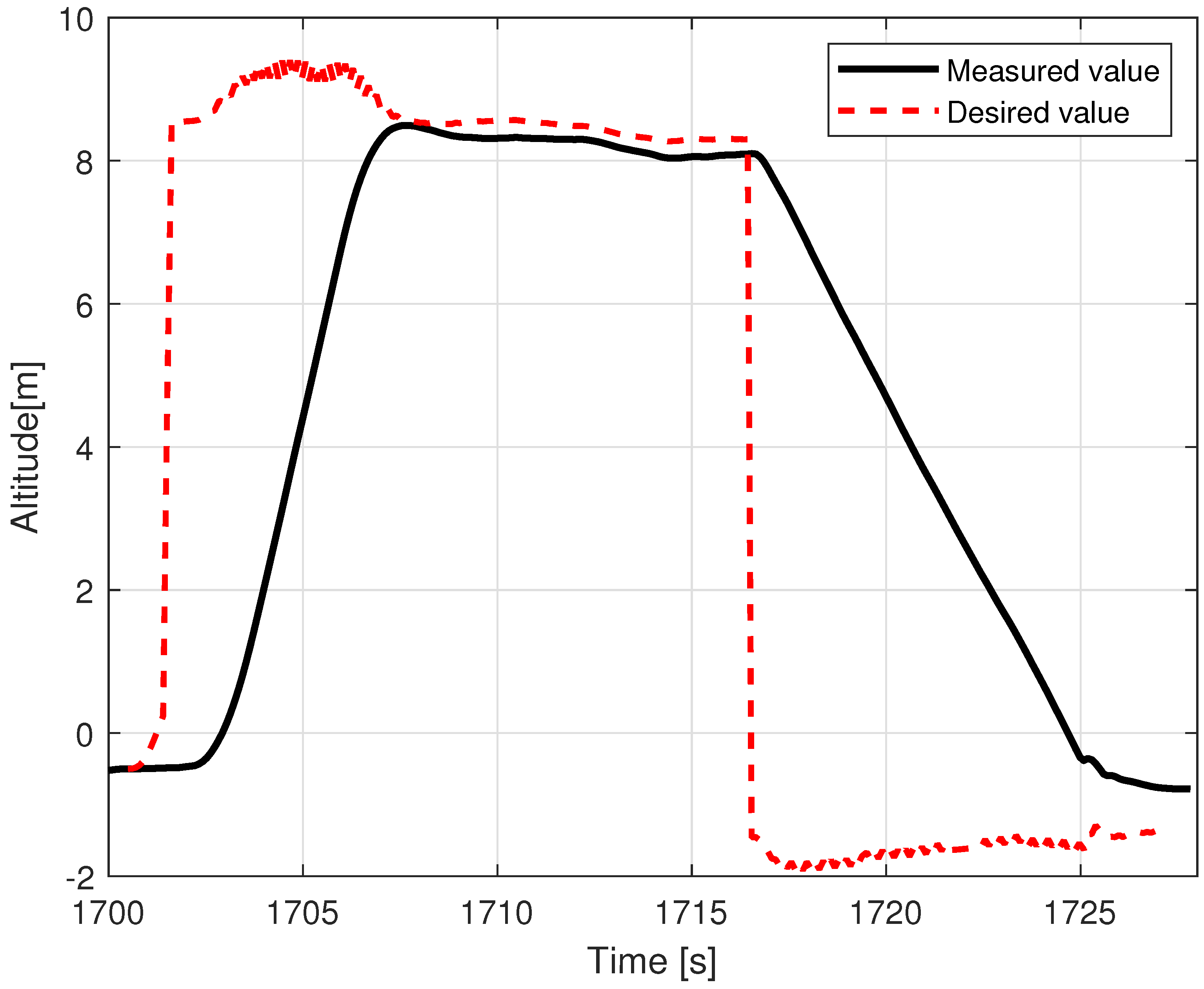
- Following the moving barge in MC mode at 4 m (Albatross) and 8 m (tethered multicopter) above the moving deck (AGL altitude),
- Automatic vertical landing on the barge’s deck while it was still in motion.
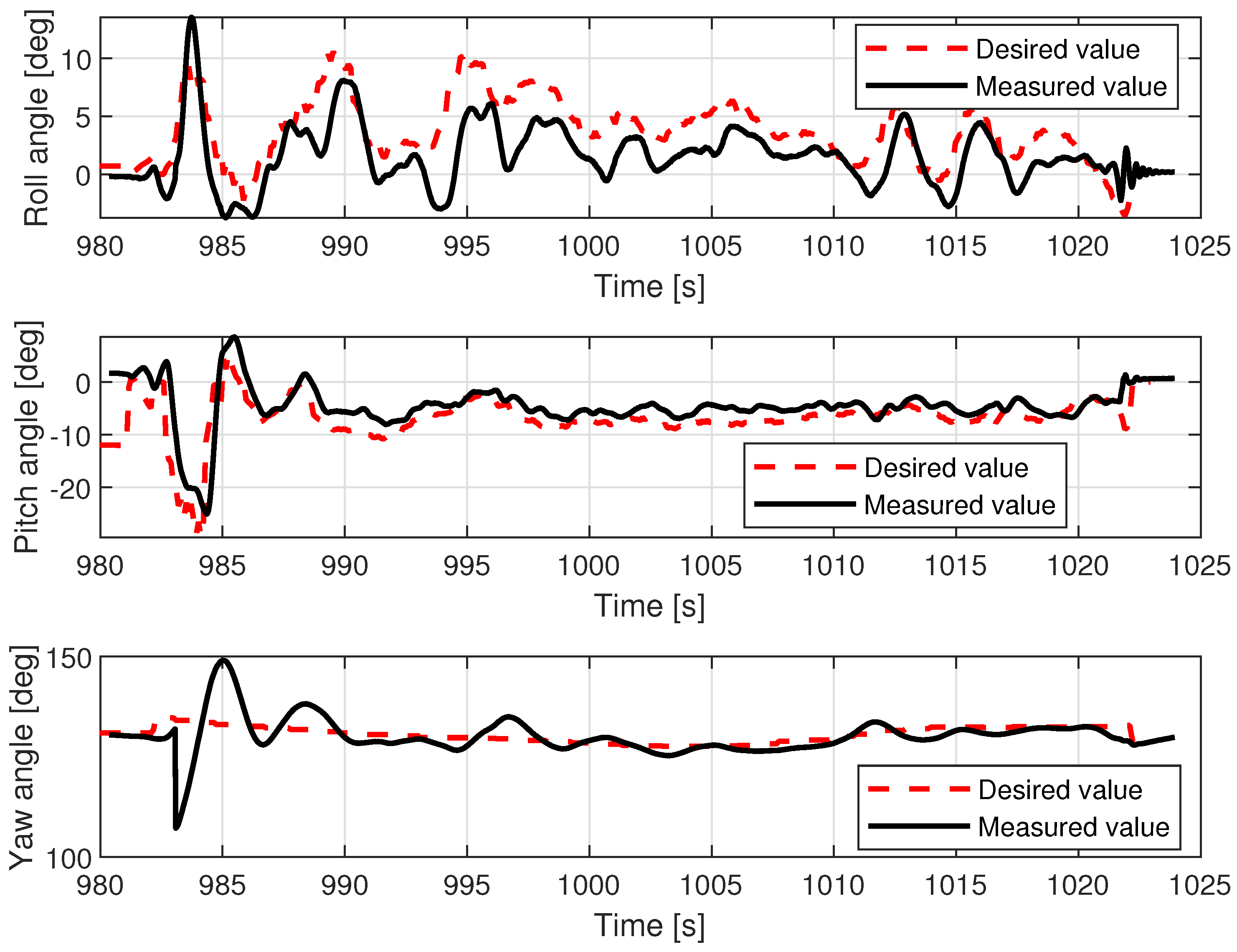
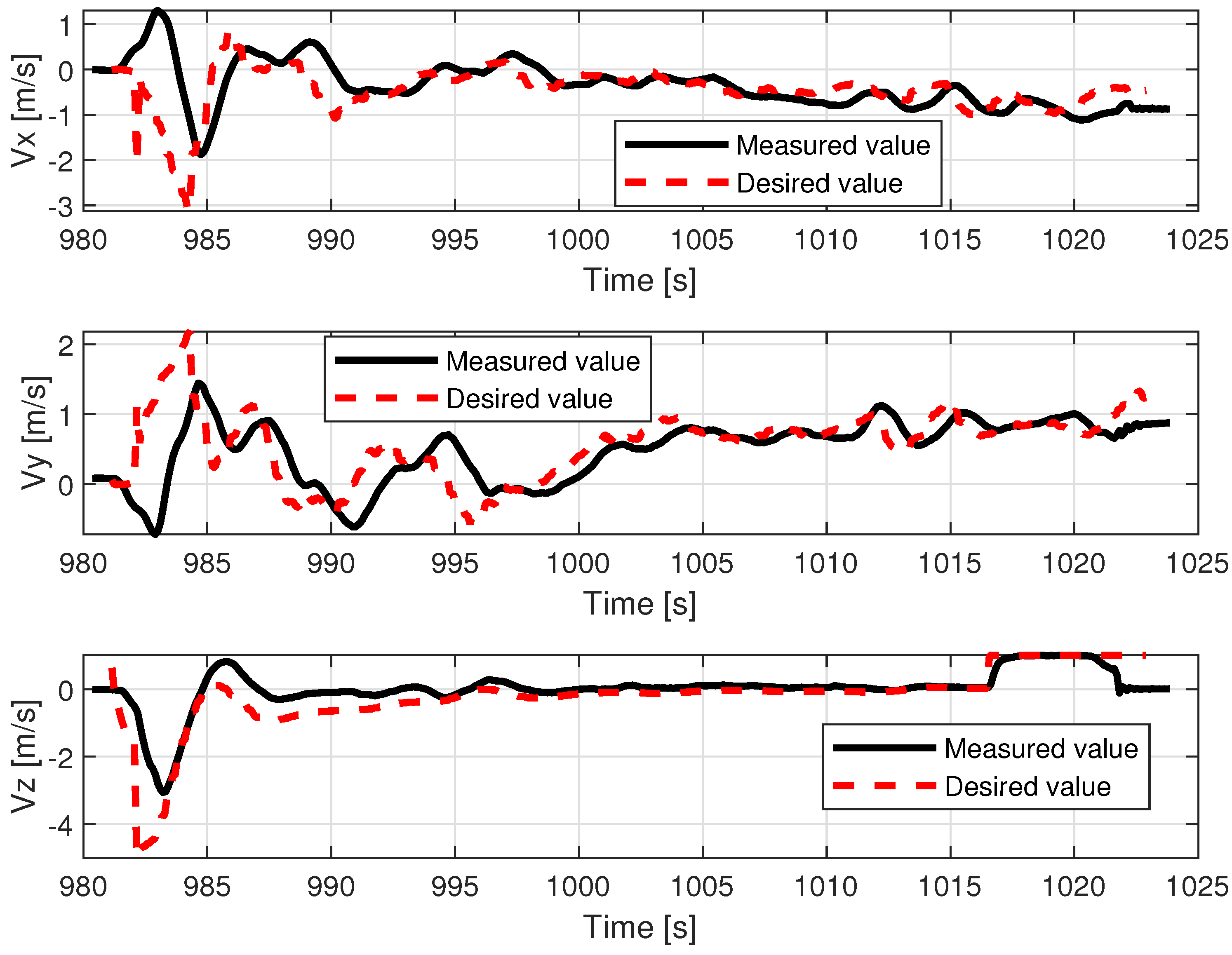
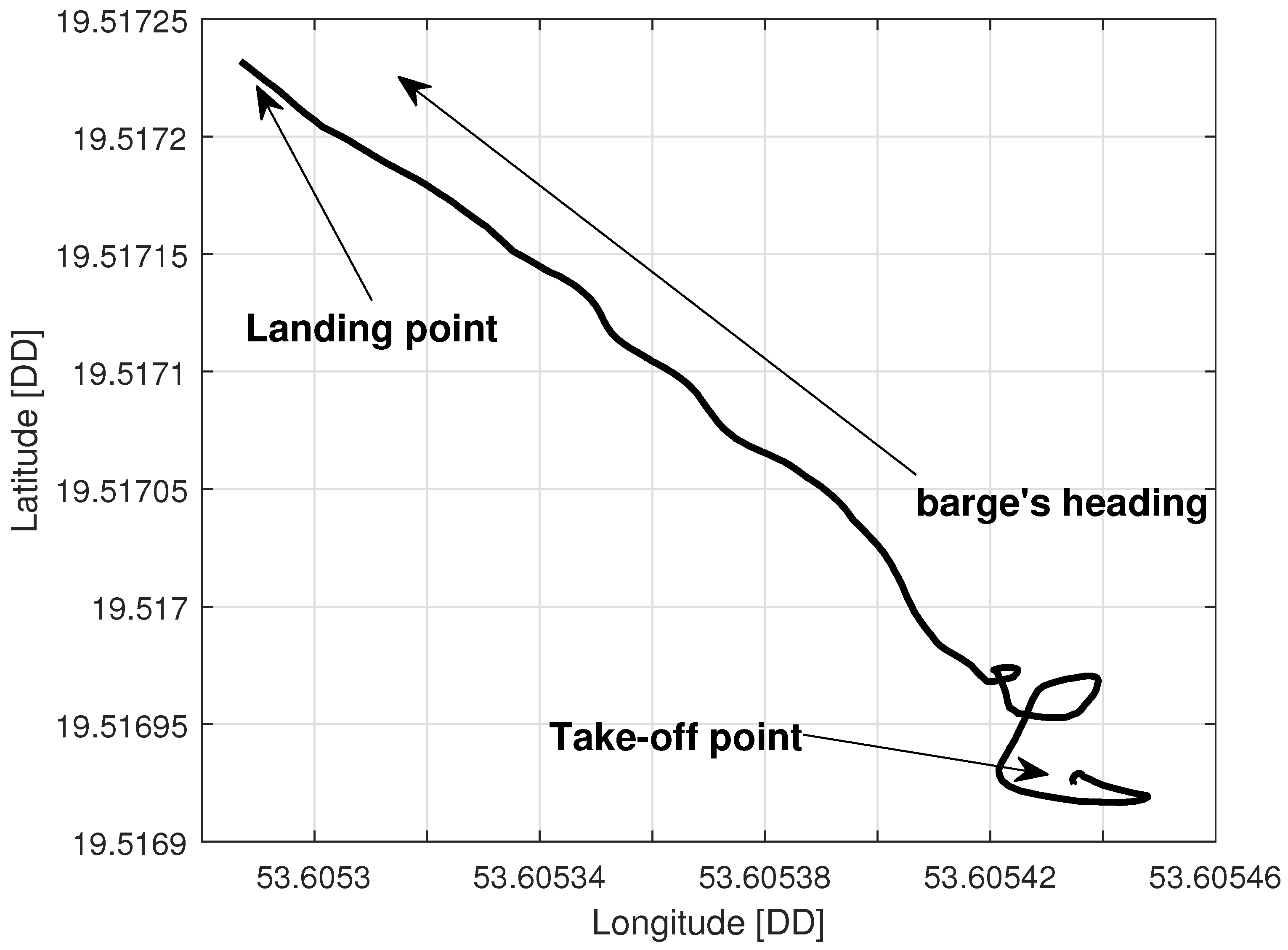
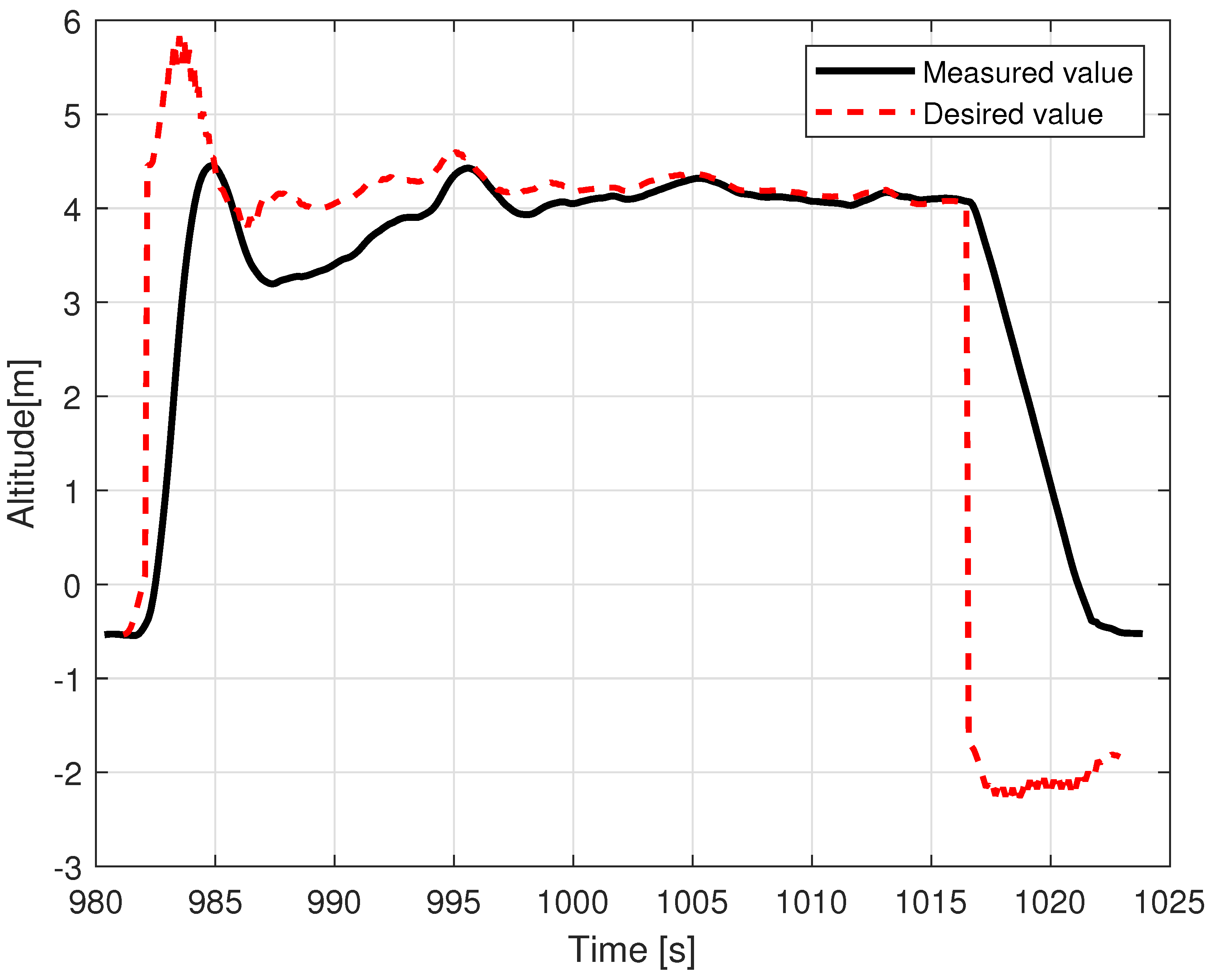
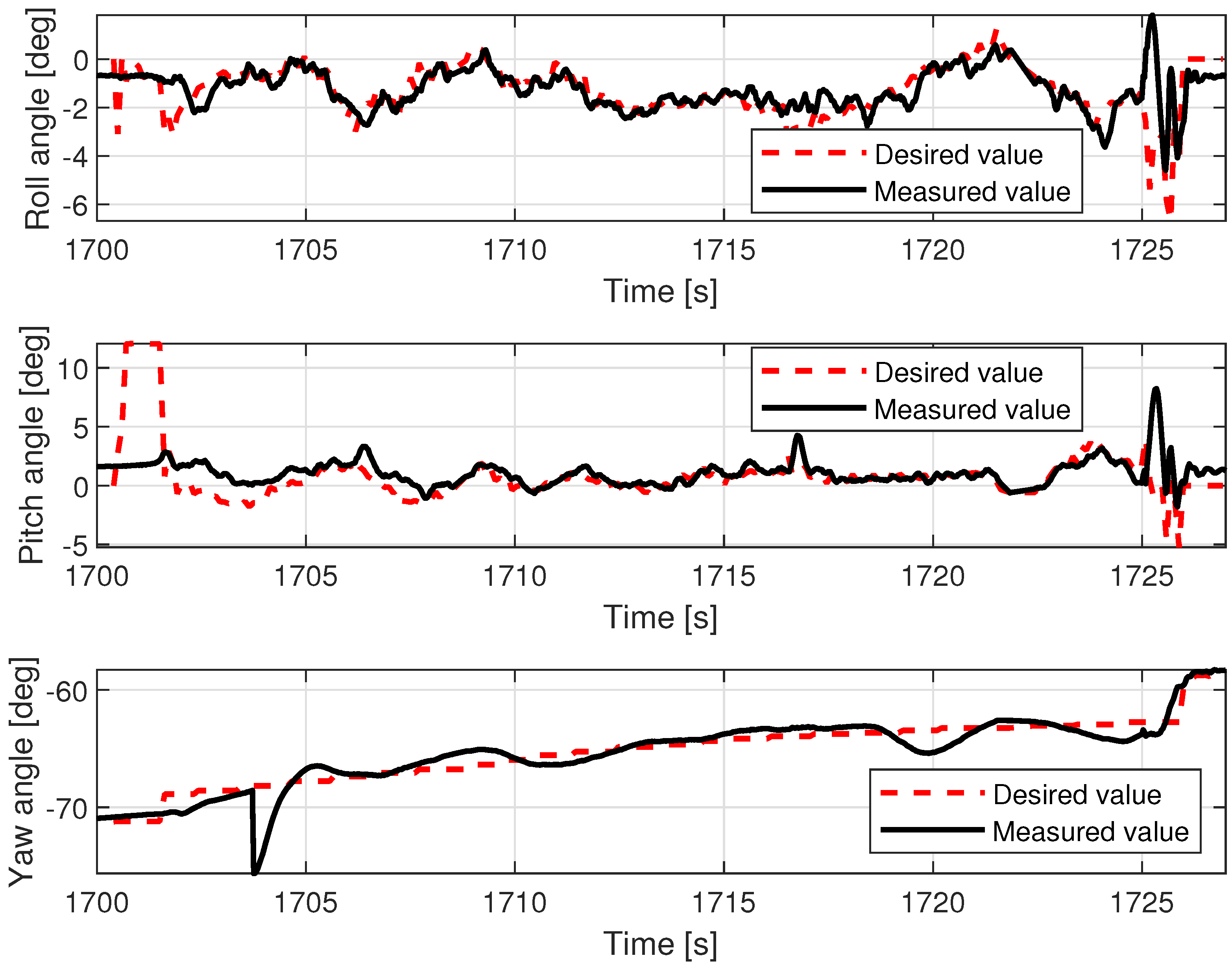
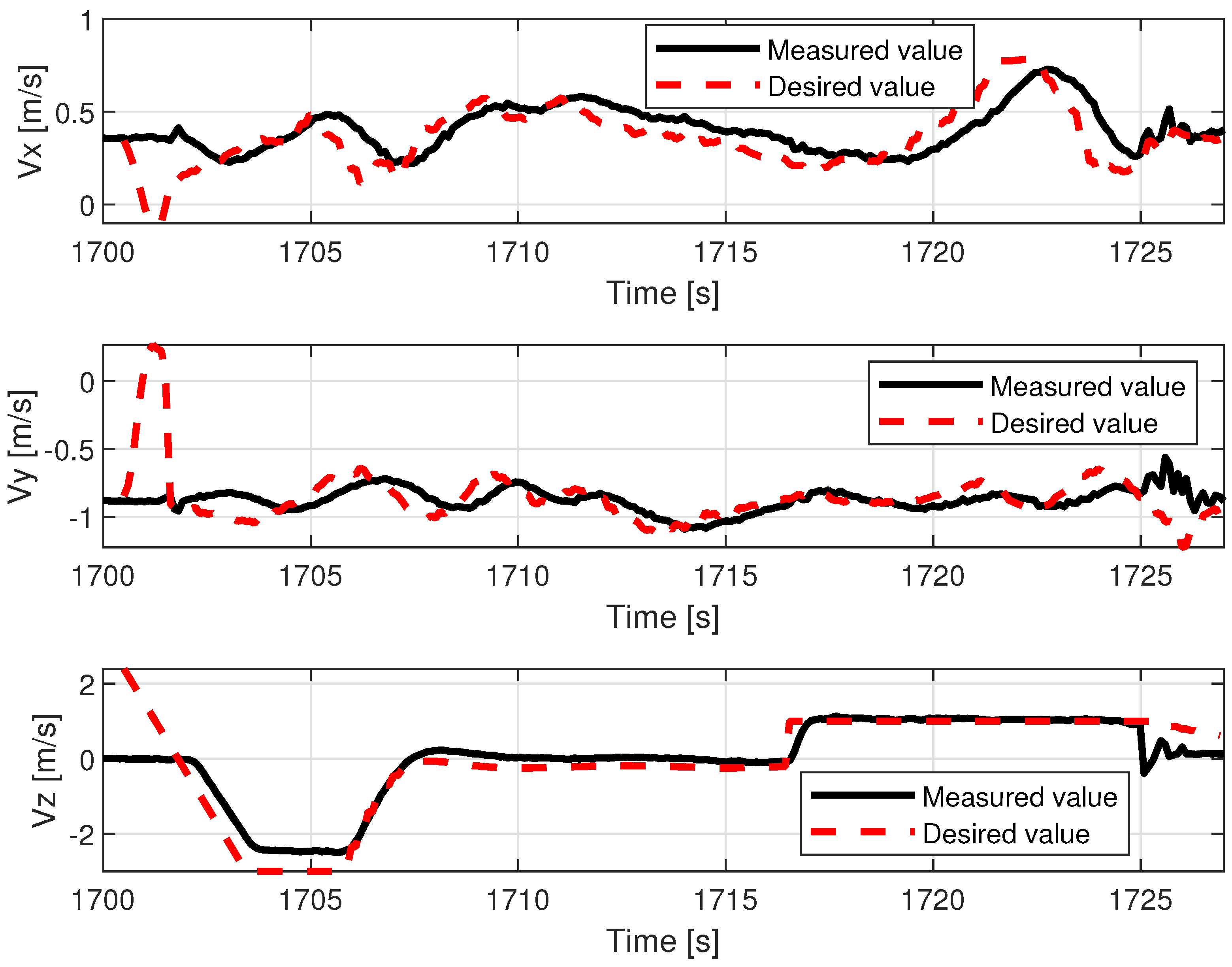
5. Results
5.1. VTOL Results
5.2. Tethered Multicopter Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Schuchardt, I.; Dautermann, T.; Donkels, A.; Lieb, T.J.; Morscheck, F.; Rudolph, M.; Schwoch, G. Mission Management and Landing Assistance for an Unmanned Rotorcraft for Maritime Operations. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–9. [Google Scholar] [CrossRef]
- Bello, A.B.; Navarro, F.; Raposo, J.; Miranda, M.; Zazo, A.; Álvarez, M. Fixed-Wing UAV Flight Operation under Harsh Weather Conditions: A Case Study in Livingston Island Glaciers, Antarctica. Drones 2022, 6, 384. [Google Scholar] [CrossRef]
- Abujoub, S.; McPhee, J.; Westin, C.; Irani, R.A. Unmanned aerial vehicle landing on maritime vessels using signal prediction of the ship motion. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Li, Q.; Taipalmaa, J.; Queralta, J.P.; Gia, T.N.; Gabbouj, M.; Tenhunen, H.; Raitoharju, J.; Westerlund, T. Towards Active Vision with UAVs in Marine Search and Rescue: Analyzing Human Detection at Variable Altitudes. In Proceedings of the 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Abu Dhabi, United Arab Emirates, 4–6 November 2020; pp. 65–70. [Google Scholar] [CrossRef]
- Rodzewicz, M.; Goraj, Z.; Tomaszewski, A. Design and testing of three tailless unmanned aerial vehicle configurations built for surveillance in Antarctic environment. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2018, 232, 2598–2614. [Google Scholar] [CrossRef]
- Gautam, A.; Singh, M.; Sujit, M.; Saripalli, S. Autonomous Quadcopter Landing on a Moving Target. Sensors 2022, 22, 1116. [Google Scholar] [CrossRef] [PubMed]
- Xuan-Mung, N.; Nguyen, N.P.; Nguyen, T.; Pham, D.B.; Vu, M.T.; Thanh, H.L.N.N.; Hong, S.K. Quadcopter Precision Landing on Moving Targets via Disturbance Observer-Based Controller and Autonomous Landing Planner. IEEE Access 2022, 10, 83580–83590. [Google Scholar] [CrossRef]
- Giusti, E.; Capria, A.; Saverino, A.L.; Gelli, A.; Munoz-Castaner, L.; Dosil, R.; Gonzales, I.; Naya, J.; Menendez, J. A Compact Drone based Multisensory System for Maritime Observation. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Krystosik-Gromadzinska, A. The use of drones in the maritime sector—Areas and benefits. Sci. J. Marit. Univ. Szczec.-Zesz. Nauk. Akad. Mor. W Szczec. 2021, 76, 139. [Google Scholar] [CrossRef]
- Guan, S.; Sirianni, H.; Wang, G.; Zhu, Z. sUAS Monitoring of Coastal Environments: A Review of Best Practices from Field to Lab. Drones 2022, 6, 142. [Google Scholar] [CrossRef]
- Guo, K.X.; Qiu, Z.R.; Mia, C.X.; Zaini, A.H.; Chen, C.L.; Meng, W.; Xie, L.H. Ultra-Wideband-Based Localization for Quadcopter Navigation. Unamnned Syst. 2016, 4, 23–24. [Google Scholar] [CrossRef]
- Tiemann, J.; Schweikowski, F.; Wietfeld, C. Design of an UWB indoor-positioning system for UAV navigation in GNSS-denied environments. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Guo, K.X.; Qiu, Z.R.; Meng, W.; Xie, L.H.; Teo, R. Ultra-wideband based cooperative relative localization algorithm and experiments for multiple unmanned aerial vehicles in GPS denied environments. Int. J. Micro Air Veh. 2017, 9, 169–186. [Google Scholar] [CrossRef]
- Ambroziak, L.; Kownacki, C.; Bożko, A. Hybrid VTOL UAV Autonomous Operations from Mobile Landing Pad. In Proceedings of the 26th International Conference on Methods and Models in Automation and Robotics (MMAR), Międzyzdroje, Poland, 22–25 August 2022; pp. 270–275. [Google Scholar] [CrossRef]
- Ambroziak, L.; Ciężkowski, M.; Wolniakowski, A.; Romaniuk, S.; Bożko, A.; Ołdziej, D.; Kownacki, C. Experimental tests of hybrid VTOL unmanned aerial vehicle designed for surveillance missions and operations in maritime conditions from ship-based helipads. J. Field Robot. 2022, 39, 203–217. [Google Scholar] [CrossRef]
- Ciezkowski, M.; Oldziej, D.; Romaniuk, S.; Wolniakowski, A. Integrated Framework for Autonomous Mobile Platform Based Unmanned Aerial Vehicle Operation. In Proceedings of the International Conference Mechatronic Systems and Materials (MSM), Bialystok, Poland, 1–3 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Suárez, L.; Fereres, E. Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring from an Unmanned Aerial Vehicle. Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Agrafiotis, P.; Skarlatos, D.; Georgopoulos, A.; Karantzalos, K. Shallow Water Bathymetry Mapping from UAV Imagery Based on Machine Learning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W10, 9–16. [Google Scholar] [CrossRef]
- Burdziakowski, P. Increasing the Geometrical and Interpretation Quality of Unmanned Aerial Vehicle Photogrammetry Products Using Super-resolution Algorithms. Remote Sens. 2020, 12, 810. [Google Scholar] [CrossRef]
- Dhaliwal, S.S.; Ramirez-Serrano, A. Control of an unconventional VTOL UAV for search and rescue operations within confined spaces based on the Marc control architecture. In Proceedings of the 2009 IEEE International Workshop on Safety, Security Rescue Robotics (SSRR 2009), Denver, CO, USA, 3–6 November 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–6. [Google Scholar]
- Fabiani, P.; Fuertes, V.; Piquereau, A.; Mampey, R.; Teichteil-Königsbuch, F. Autonomous flight and navigation of VTOL UAVs: From autonomy demonstrations to out-of-sight flights. Aerosp. Sci. Technol. 2007, 11, 183–193. [Google Scholar] [CrossRef]
- Okulski, M.; Ławryńczuk, M. A Small UAV Optimized for Efficient Long-Range and VTOL Missions: An Experimental Tandem-Wing Quadplane Drone. Appl. Sci. 2022, 12, 7059. [Google Scholar] [CrossRef]
- Lewicka, O.; Specht, M.; Specht, C. Assessment of the Steering Precision of a UAV along the Flight Profiles Using a GNSS RTK Receiver. Remote Sens. 2022, 14, 6127. [Google Scholar] [CrossRef]
- Dąbrowski, P.S.; Specht, C.; Specht, M.; Burdziakowski, P.; Makar, A.; Lewicka, O. Integration of Multi-source Geospatial Data from GNSS Receivers, Terrestrial Laser Scanners, and Unmanned Aerial Vehicles. Can. J. Remote Sens. 2021, 47, 621–634. [Google Scholar] [CrossRef]
- Yang, B.; Yang, E. A Survey on Radio Frequency based Precise Localisation Technology for UAV in GPS-denied Environment. J. Intell. Robot. Syst. 2021, 103, 38. [Google Scholar] [CrossRef]
- Paul, H.; Miyazaki, R.; Kominami, T.; Ladig, R.; Shimonomura, K. A Versatile Aerial Manipulator Design and Realization of UAV Take-Off from a Rocking Unstable Surface. Appl. Sci. 2021, 11, 9157. [Google Scholar] [CrossRef]
- Tang, H.; Zhang, D.; Gan, Z. Control System for Vertical Take-Off and Landing Vehicle’s Adaptive Landing Based on Multi-Sensor Data Fusion. Sensors 2020, 20, 4411. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.-W.; Lo, L.-Y.; Cheung, H.C.; Feng, Y.; Yang, A.-S.; Wen, C.-Y.; Zhou, W. Proactive Guidance for Accurate UAV Landing on a Dynamic Platform: A Visual–Inertial Approach. Sensors 2022, 22, 404. [Google Scholar] [CrossRef] [PubMed]
- Grlj, C.G.; Krznar, N.; Pranjić, M. A Decade of UAV Docking Stations: A Brief Overview of Mobile and Fixed Landing Platforms. Drones 2022, 6, 17. [Google Scholar] [CrossRef]
- Acevedo, J.J.; García, M.; Viguria, A.; Ramón, P.; Arrue, B.C.; Ollero, A. Autonomous Landing of a Multicopter on a Moving Platform Based on Vision Techniques. In Proceedings of the ROBOT 2017: Third Iberian Robotics Conference, ROBOT 2017, Sevilla, Spain, 22–24 November 2017; Ollero, A., Sanfeliu, A., Montano, L., Lau, N., Cardeira, C., Eds.; Advances in Intelligent Systems and Computing. Springer: Cham, Sweitzerland, 2017; Volume 694. [Google Scholar]
- Shao, G.; Ma, Y.; Malekian, R.; Yan, X.; Li, Z. A Novel Cooperative Platform Design for Coupled USV–UAV Systems. IEEE Trans. Ind. Inform. 2019, 15, 4913–4922. [Google Scholar] [CrossRef]
- Narváez, E.; Ravankar, A.A.; Ravankar, A.; Emaru, T.; Kobayashi, Y. Autonomous VTOL-UAV Docking System for Heterogeneous Multirobot Team. IEEE Trans. Instrum. Meas. 2021, 70, 5500718. [Google Scholar] [CrossRef]
- Palafox, P.R.; Garzón, M.; Valente, J.; Roldán, J.J.; Barrientos, A. Robust Visual-Aided Autonomous Takeoff, Tracking, and Landing of a Small UAV on a Moving Landing Platform for Life-Long Operation. Appl. Sci. 2019, 9, 2661. [Google Scholar] [CrossRef]
- Alarcón, F.; García, M.; Maza, I.; Viguria, A.; Ollero, A. A Precise and GNSS-Free Landing System on Moving Platforms for Rotary-Wing UAVs. Sensors 2019, 19, 886. [Google Scholar] [CrossRef]
- Aissi, M.; Moumen, Y.; Berrich, J.; Bouchentouf, T.; Bourhaleb, M.; Rahmoun, M. Autonomous solar USV with an automated launch and recovery system for UAV: State of the art and Design. In Proceedings of the 2020 IEEE 2nd International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Kenitra, Morocco, 2–3 December 2020; pp. 1–6. [Google Scholar]
- Ma, T.L.; Yang, C.G.; Gan, W.B.A.; Xue, Z.H.; Zhang, Q.L.; Zhang, X.O. Analysis of Technical Characteristics of Fixed-Wing VTOL UAV. In Proceedings of the 2017 IEEE International Conference on Unamanned Ssystems (ICUS), Beijing, China, 27–29 October 2017; pp. 293–297. [Google Scholar] [CrossRef]
- Misra, A.; Jayachandran, S.; Kenche, S.; Katoch, A.; Suresh, A.; Gundabattini, E.; Selvaraj, S.K.; Legesse, A.A. A Review on Vertical Take-Off and Landing (VTOL) Tilt-Rotor and Tilt Wing Unmanned Aerial Vehicles (UAVs). J. Eng. 2022, 2022, 1803638. [Google Scholar] [CrossRef]
- Hegde, N.T.; George, V.I.; Nayak, C.G.; Kumar, K. Design, dynamic modelling and control of tilt-rotor UAVs: A review. Int. J. Intell. Unamnned Syst. 2020, 8, 143–161. [Google Scholar] [CrossRef]
- Penkov, I.; Alksandrov, D. Analysis and study of the influence of the geometrical parameters of mini unmanned quad-rotor helicopters to optimise energy saving. Int. J. Automot. Mech. Eng. 2018, 14, 4730–4746. [Google Scholar] [CrossRef]
- Oldziej, D.; Gosiewski, Z. Modelling of Dynamic and Control of Six-Rotor Autonomous Unmanned Aerial Vehicle. Solid State Phenom. 2013, 198, 220–225. [Google Scholar] [CrossRef]
- Setlak, L.; Kowalik, R. Studies of 4-rotor unmanned aerial vehicle UAV in the field of control system. In Proceedings of the 22nd International Conference on Circuits, Systems, Communications and Computers (CSCC 2018), Majorca, Spain, 14–17 July 2018; Volume 210. [Google Scholar] [CrossRef]
- Kontron. pITX-E38, ULTRASMALL 2.5” Pico-ITX BOARD WITH Intel® Atom™ E38XX; Kontron: Augsburg, Germany, 2016. [Google Scholar]
- U-blox. NEO-M8P u-blox M8 High Precision GNSS Modules; No. UBX-15016656; u-blox: Thalwil, Switzerland, 2020. [Google Scholar]
- Sparton. AHRS-8, Attitude Heading Reference System; No. 12.21.17; Sparton: Schaumburg, IL, USA, 2017. [Google Scholar]
- Barral, V.; Escudero, C.J.; García-Naya, J.A. NLOS Classification Based on RSS and Ranging Statistics Obtained from Low-Cost UWB Devices. In Proceedings of the 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Janczak, D.; Walendziuk, W.; Sadowski, M.; Zankiewicz, A.; Konopko, K.; Idzkowski, A. Accuracy Analysis of the Indoor Location System Based on Bluetooth Low-Energy RSSI Measurements. Energies 2022, 15, 8832. [Google Scholar] [CrossRef]
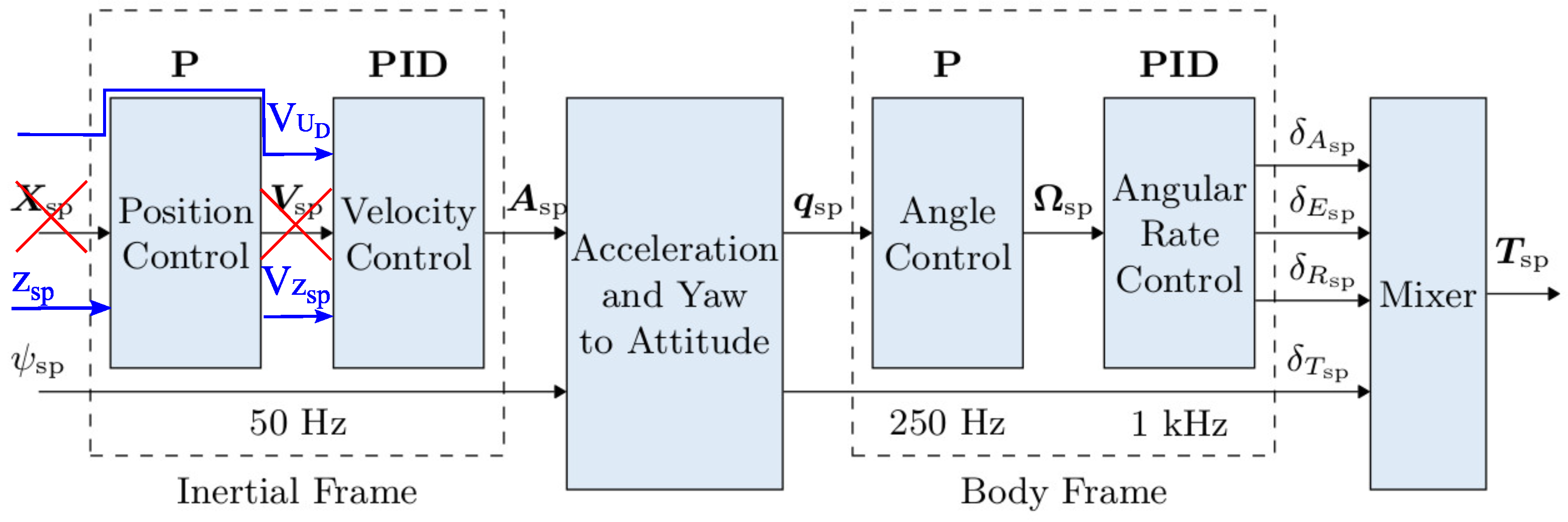
- PX4 Controller Diagrams. Available online: https://docs.px4.io/main/en/flight_stack/controller_diagrams.html (accessed on 24 November 2022).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value [Unit] |
|---|---|
| Wingspan | 3.1 [m] |
| MTOW (Maximum Take Off Weight) | 10 [kg] |
| Battery | 2 × 10,000 [mAh], 6S, 22.20 [V] |
| Motor Voltage | 44.40 [V] |
| Battery capacity | 12 [Ah] |
| Flight duration MC | 15 * [min] |
| Parameter | Value [Unit] |
|---|---|
| Dimension between opposite motor axles | 960 [mm] |
| Max.wheelbase diameter | 1400 [mm] |
| Maximum total drive thrust | 240 [N] |
| MTOW | 13.5 [kg] |
| Payload | 3 [kg] |
| Flight altitude | Up to 50 [m] |
| Power type | Electric, tethered from ground |
| Motor voltage | 22.2 [V] |
| Wind resistance | 60 [km/h] |
| Construction | Modular - equipment can be adapted to needs |
| Flight mode | Semi-manual or automatic |
| Flight duration | Unlimited * |
| Parameter | Value [Unit] |
|---|---|
| Average wind speed | 3.1 [ m/s ] |
| Average air temperature | 22.1 [°] |
| Average air humidity | 73.2 [%] |
| UAV Type | Number of Trials | Mean Dist.L | Std. Dev. | Max | Min |
|---|---|---|---|---|---|
| VTOL UAV | 10 | 43.8 [cm] | 11 [cm] | 65 [cm] | 26 [cm] |
| Multicopter | 10 | 40.20 [cm] | 9.0 [cm] | 61 [cm] | 31 [cm] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kownacki, C.; Ambroziak, L.; Ciężkowski, M.; Wolniakowski, A.; Romaniuk, S.; Bożko, A.; Ołdziej, D. Precision Landing Tests of Tethered Multicopter and VTOL UAV on Moving Landing Pad on a Lake. Sensors 2023, 23, 2016. https://doi.org/10.3390/s23042016
Kownacki C, Ambroziak L, Ciężkowski M, Wolniakowski A, Romaniuk S, Bożko A, Ołdziej D. Precision Landing Tests of Tethered Multicopter and VTOL UAV on Moving Landing Pad on a Lake. Sensors. 2023; 23(4):2016. https://doi.org/10.3390/s23042016
Chicago/Turabian StyleKownacki, Cezary, Leszek Ambroziak, Maciej Ciężkowski, Adam Wolniakowski, Sławomir Romaniuk, Arkadiusz Bożko, and Daniel Ołdziej. 2023. "Precision Landing Tests of Tethered Multicopter and VTOL UAV on Moving Landing Pad on a Lake" Sensors 23, no. 4: 2016. https://doi.org/10.3390/s23042016
APA StyleKownacki, C., Ambroziak, L., Ciężkowski, M., Wolniakowski, A., Romaniuk, S., Bożko, A., & Ołdziej, D. (2023). Precision Landing Tests of Tethered Multicopter and VTOL UAV on Moving Landing Pad on a Lake. Sensors, 23(4), 2016. https://doi.org/10.3390/s23042016