3. Study Results
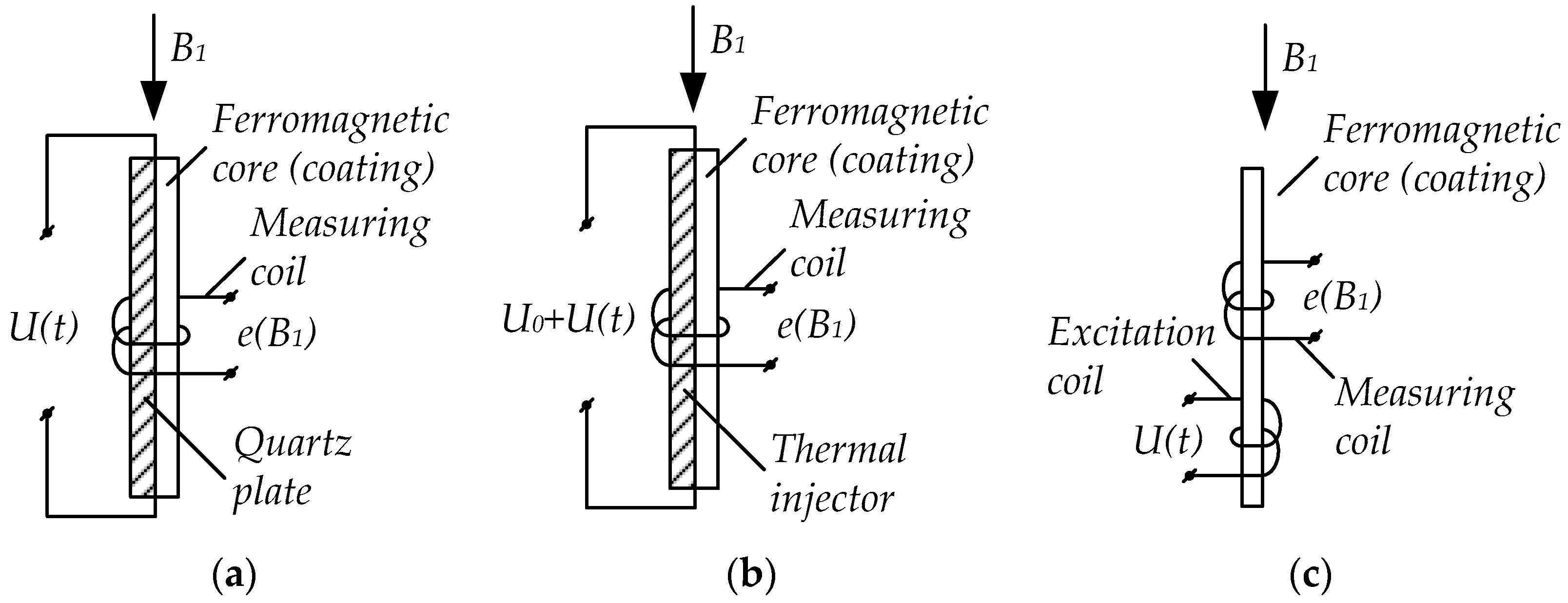
Summarizing the features of the considered magnetic NDT techniques, one can note that each of these well-known methods is based on a single physical effect determining, in fact, both the technique opportunities and implementation specifics.
The present paper proposes an FS version with a new principle of bifactor excitation based on electromagnetic acoustic and magnetic modulation (EMA and MM) effects. This FS also allows the implementation of the NDT method integrating the potential of three magnetic NDT techniques: constant magnetic field, variable magnetic field, and the fluxgate technique. It does not require a mandatory pre-magnetization of the test object material.
In this case, a constant magnetic field is used as a probing physical one modulated by a variable magnetic field through a μ-modulation, and this process variability depends on the structural conditions of the test object material.
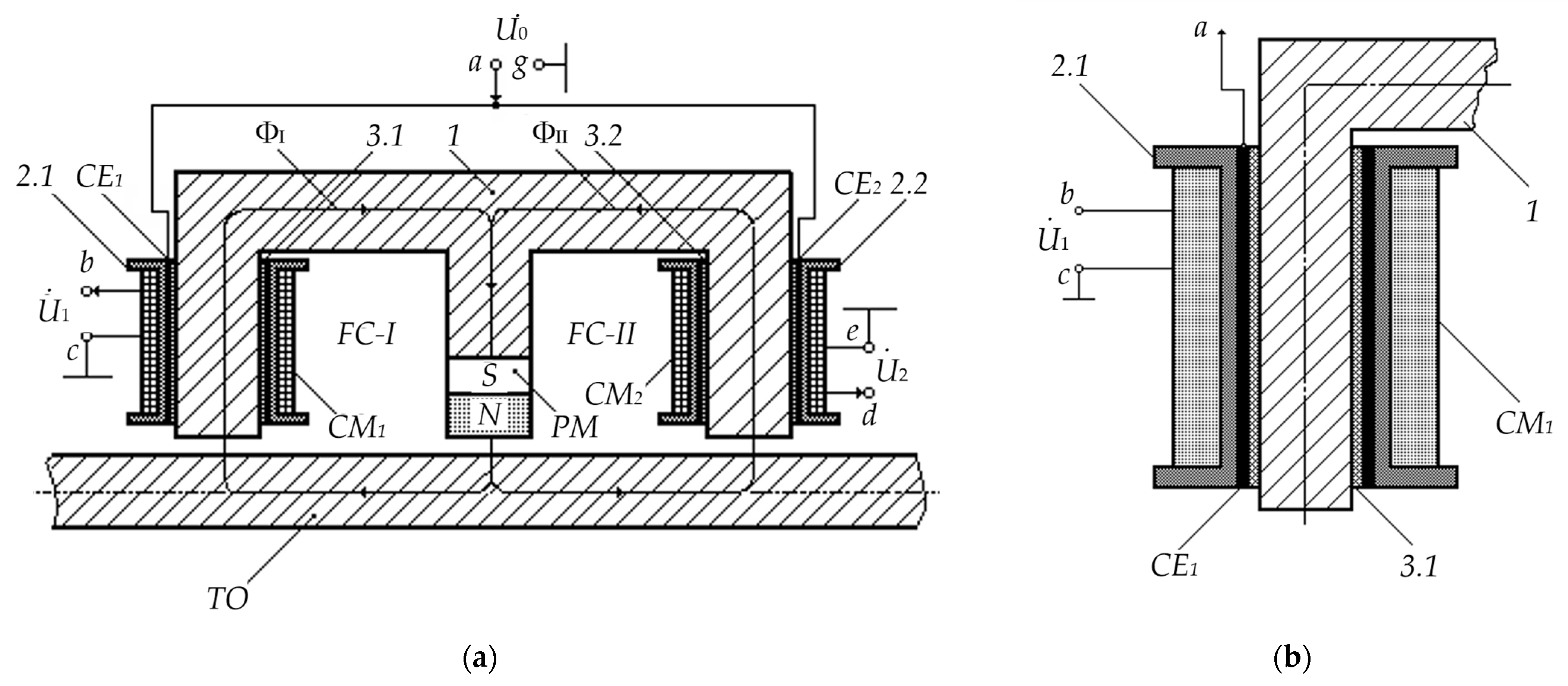
Figure 2 provides a version of the new FS design solution.
The FS key structural and functional elements are: 1—E-core made of an electrically conductive ferrimagnet; TO—tested object—long ferromagnetic element in the form of a steel bar; PM—permanent magnet; MC1 and MC2—electric windings of the first and second measuring coils, respectively; 2.1 and 2.2—dielectric formers of MC1 and MC2, respectively; CE1 and CE2—the first and second cylindrical electrodes, which are excitation elements for MC1 and MC2, respectively, made of electrically conductive material (copper, aluminum, etc.) in the form of thin-walled tubes with a slot along the generatrix, located coaxially on the inner surface of dielectric formers 2.1 and 2.2, respectively; 3.1 and 3.2—dielectric cylinder bushings located locally in particular core sections; ‘a’—terminal to connect the excitation voltage relative to the ‘case’; ‘b’ and ‘d’—terminals to connect output signals and of, respectively, MC1 and MC2 relative to the ‘case’, which are starts of electrical windings CE1 and CE2, respectively; ‘c’ and ‘e’—terminals for connecting the ‘ends’ of corresponding electric windings CE1 and CE2 to the high-frequency generator ‘case’; ‘g’—the ‘case’ of the frequency generator.
A feature of this FS type is the use of cognominal terminals of electrical windings (the winding starts) as output signals MC1 and MC2 (relative to the ‘case’), which, in turn, is among the major conditions for the normal operation of the considered FS. In addition, CE1 and CE2 with lower wire layers of, respectively, windings of MC1 and MC2 form coupling capacitors and . The excitation voltage relative to the ‘case’ is supplied through the coupling capacitors and , respectively, to the starts of electrical windings MC1 and MC2, coherently spatially arranged (start-end) on the core.
The E-core forms with the TO two interconnected ferrimagnetic circuits (FC) I and II, through which the magnetic fluxes ΦI and ΦII are configured in a certain way, initiated by combined physical fields: the PM constant magnetic field and variable magnetic fields formed by excitation currents of electric windings MC1 and MC2.
When a high-frequency generator supplies an electric potential φ
e relative to the case’s electric potential φ
0 (grounding point) to CE
1 and CE
2, respective electric potentials φ′
e and φ″
e are induced in the lower wire layers of windings of MC
1 and MC
2. Moreover, the symmetrical spatial arrangement of passage coils and their identical design parameters allow the assumption that φ′
e = φ″
e = φ
e. In this case, the required symmetry in the spatial arrangement of passage coils and the balanced lower level of the zero signal are ensured by the corresponding axial shift of passage coil sections relative to the constant magnet. Then, in the series electrical resonance mode (at the cyclic frequency ω
r), currents in electric windings of MC
1 and MC
2 are determined by the equation:
where φ
0 = 0;
R =
R1 =
R2, and
R1 and
R2 are active resistances of the coil windings (MC
1 and MC
2), respectively;
U0m is the high-frequency generator electrical voltage amplitude.
In this case, the strength of the variable magnetic field formed by MC
1 and MC
2 excitation currents can be expressed as follows [
30]:
where
l =
l1 =
l2 is the length of electric windings of MC
1 and MC
2;
w =
w1 =
w2 is the number of turns of electric windings of MC
1 and MC
2;
is the strength amplitude of the magnetic field produced by the current
i(t).
Consider the issues relating to the peculiarities of magnetic fluxes ΦI and ΦII in the magnetic cores corresponding to FCs.
According to the electrical laws, magnetic fluxes Φ
I and Φ
II generated in FC-I and FC-II can be expressed, respectively:
where
is the total magnetizing force in FC-I, and
are magnetizing forces created in FC-I by, respectively,
H0 and
H(t);
is the total magnetizing force in FC-II, and
are magnetizing forces created in FC-II by, respectively,
H0 and
H(t);
is the magnetic resistance of the TO section located in the working area of FC-I and is its controlled element;
is the total magnetic resistance of FC-I structural elements;
are magnetic resistances of, respectively, FC-I ferromagnetic and dielectric (air gap) structural elements;
is the magnetic resistance of the TO section located in the working area of FC-II and is its controlled element;
is the total magnetic resistance of FC-II structural elements, and
are magnetic resistances of, respectively, FC-II ferromagnetic and dielectric (air gap) structural elements.
Note that as they are the parameters of identical structural elements of FC-I and FC-II; and are variable parameters of controlled elements of, respectively, FC-I and FC-II, corresponding to the condition in the absence of a flaw in the working areas of FC-I and FC-II. Moreover, it is considered that ≫ and ≫ .
Considering the aforementioned, after simple conversions (4), we obtain:
where
and
are magnetic conductivities of the TO sections located in the working areas of FC-I and FC-II, respectively;
,
, and
are, respectively, the magnetic permeability, length, and cross-sectional area of the TO section located in the working area of FC-I;
,
, and
are, respectively, the magnetic permeability, length, and cross-sectional area of the TO section located in the working area of FC-II;
and
are total magnetic conductivities of structural elements of FC-I and FC-II, respectively;
and
.
The analysis of Equation (5) allows for drawing an important conclusion that the time invariability of magnetic fluxes ΦI and ΦII parameters is mainly determined by the variability of parameters and .
Further, consider the impact of combined magnetic fields (constant and variable) in the FS core directly on the ferrimagnetic circuits’ conductive ferrimagnetic structural element material structure.
When studying the magnetic permeability μ as a multi-affected particular parameter of the core material, variable magnetic fields excited by MC1 and MC2 and initiating the MM effect can be considered as the major impact and an acoustic field, which is a manifestation of the EMA effect, as the additional one. Therefore, the proposed FS version is, in fact, a parametric modulator, where the measured parameter (the core’s constant magnetic field) is modulated due to a bifactor impact on a particular parameter, i.e., the μ-modulation is simultaneously determined by the MM and EMA effects.
MM involves variating the ferromagnetic conductive material magnetic state with simultaneous magnetization in variable and measured constant magnetic fields. Modulation by such a total magnetic flux is possible due to the non-linear magnetic circuit properties, and the processes occurring in it are always associated with the interaction of at least two magnetic fields—an external measurable one and a variable excitation field induced, e.g., by an electric current in the excitation coil.
As for the mode of the rod ferromagnetic system material magnetic permeability conversion (μ-modulation) due to the MM, one can state that, in fact, it is the operation mode of a fluxgate with longitudinal excitation. Therefore, according to the existing parametric theory of fluxgates with longitudinal excitation:
where μ
0 = 4π × 10
−7 H/m is the magnetic constant (magnetic permeability of vacuum);
H(
t) =
Hm × sin
ωt is the exciting magnetic field strength,
Hm is the
H1 variable magnetic field amplitude; ω is the cyclic frequency;
H0 is the constant magnetic field strength;
is the function describing the law of change in the magnetic permeability of the ferromagnetic core material under the exciting magnetic field, which can be considered as the time function
for the given exciting magnetic field magnitude.
Note that the physical nature of the acoustic wave electromagnetic generation and reception phenomena is quite complex. Therefore, to better understand the essence of the proposed technical solution, consider the used EMA conversion effect in more detail.
It has been established that within a wide range of frequencies, magnetic fields, and temperatures, various mechanisms of contactless electromagnetic and acoustic waves conversion at the interface of metallic materials can be traced, united by the common concept of EMA conversion [
31]. Such a conversion essence is that in a medium with neither piezoelectric nor magnetostrictive properties, an incident electromagnetic wave excites ultrasonic waves of the same or multiple frequency. It should be emphasized that the existence of an interface as the excitation source concentration location is of fundamental significance.
Direct and reverse EMA conversion is the conversion of electromagnetic waves into elastic ones and vice versa, respectively. Moreover, the ‘electromagnetic field–elastic oscillations–electromagnetic field’ conversion can be considered a double EMA conversion.
The opposite effect, i.e., receiving acoustic signals using the EMA conversion, takes place due to the EMF arising in the coil winding affected by electromagnetic radiation of free electrons of the FC-I and FC-II material under the action of acoustic waves. In this case, according to the reciprocity theorem, the acoustic characteristics of EMA converters during generation and reception are identical. For example, the selectivity of waves and radiation patterns of EMA converters correspond to those when they work as receivers.
In fact, the EMA conversion is based on the phenomenon of mutual conversion of elastic and electromagnetic fields. The conversion of fields in solids is possible due to many physical phenomena responsible for, e.g., magnetostriction, the Lorentz force, or the force determined by the magnetization gradient. In this case, the equations of electrodynamics describing the Lorentz forces and magnetization are introduced and used along with the standard theory of elasticity to describe the generation and reception of waves, and magnetostriction is included in the model using the corresponding equations relating the elastic field to the electromagnetic field.
Summarizing the aforementioned, one can state that the EMA excitation and reception of ultrasonic oscillations are based on three effects of the electromagnetic field interaction with the structural components of the affected object material:
Magnetostriction—a physical effect when a variable external magnetic field changes the ferromagnetic material dimensions. The opposite effect is magnetoelasticity.
Magnetic interaction occurs when a ferromagnetic material and an AC conductor mutually attract and repel. The coil repulsion and attraction have a reverse mechanical impact on the test object, in which elastic oscillations arise.
Electrodynamic interaction involves the excitation of eddy currents in the conductive material, interacting with a constant magnetic field and causing oscillations, which, in turn, leads to the oscillation of atoms, i.e., the material crystal lattice (mechanical stresses occur, further causing elastic acoustic oscillations).
The operation of the proposed FS version, determined primarily by the physical properties of the core material, is based on the electrodynamic interaction. In this case, the ponderomotive forces arising when eddy currents interact with the primary field and the magnetic ponderomotive forces arising when the primary field interacts with a ferromagnetic substance are directed oppositely and balanced for some parameter magnitudes. Thereat, ferromagnet subsystems of various physical natures such as electrical, magnetic, magnetoelastic, and elastic ones are involved in the conversion, which ultimately explains the high EMA conversion sensitivity to various variations in the modulated constant magnetic field.
We study the essence of the primary electromagnetic field interaction with the secondary one and the conversion of the electromagnetic field energy into the acoustic field one in more detail.
When placing an electromagnetic field source, e.g., a solenoid winding with electric current, at the surface of an arbitrary conductive medium inside that solenoid, each electron in it experiences the action of the corresponding force under such a field, and all electrons inside the Fermi sphere receive the corresponding acceleration in the conductive medium. Such a directed motion of valence electrons causes charge transfer in a solid body, i.e., an eddy current.
Note that eddy currents induced by an electromagnetic field source in a conductive medium reflect energy back to the solenoid winding, and according to the conventional view, charge carriers distribute inside a conductive medium from the upper- to the lower-surface magnitude with a sharp frequency dependence, obeying the exponential law. Thereat, the electrons moving near the conductive medium surface and contributing to the eddy current are affected by the solenoid magnetic field (Lorentz force) pushing the electrons away from the surface. In other words, the carriers forming the eddy current move deep into the medium from the surface under the impact of Lorentz forces, creating a charge-carrier-free zone near the medium surface.
In this case, the essence of the phenomenon of electromagnetic sound generation in a conductive medium is that the converter’s (excitation source) variable electromagnetic field interacts with the conductive medium’s electronic system. The perturbation of electrons under the external electromagnetic impact, in turn, causes the elastic medium motion due to the electron–lattice interaction, and the perturbation propagates deep into the medium in the form of acoustic waves.
A change in the linear or volumetric elementary volume dimensions under an electromagnetic field is determined by the magnetostrictive interaction.
The interaction of eddy currents with the bias field induction
B0, causing the occurrence of
FA (Ampere force), is defined by acoustic oscillations taking place in the electrodynamic mechanism [
28,
29]:
where
ie is the eddy current of a section with the
dl length.
Elastic forces arise in the TO near-surface layer determined by the skin layer depth δ:
where μ
0 = 4π × 10
7 H/m; μ is the relative magnetic permeability; σ is the electrical conductivity; ω is the circular oscillation frequency.
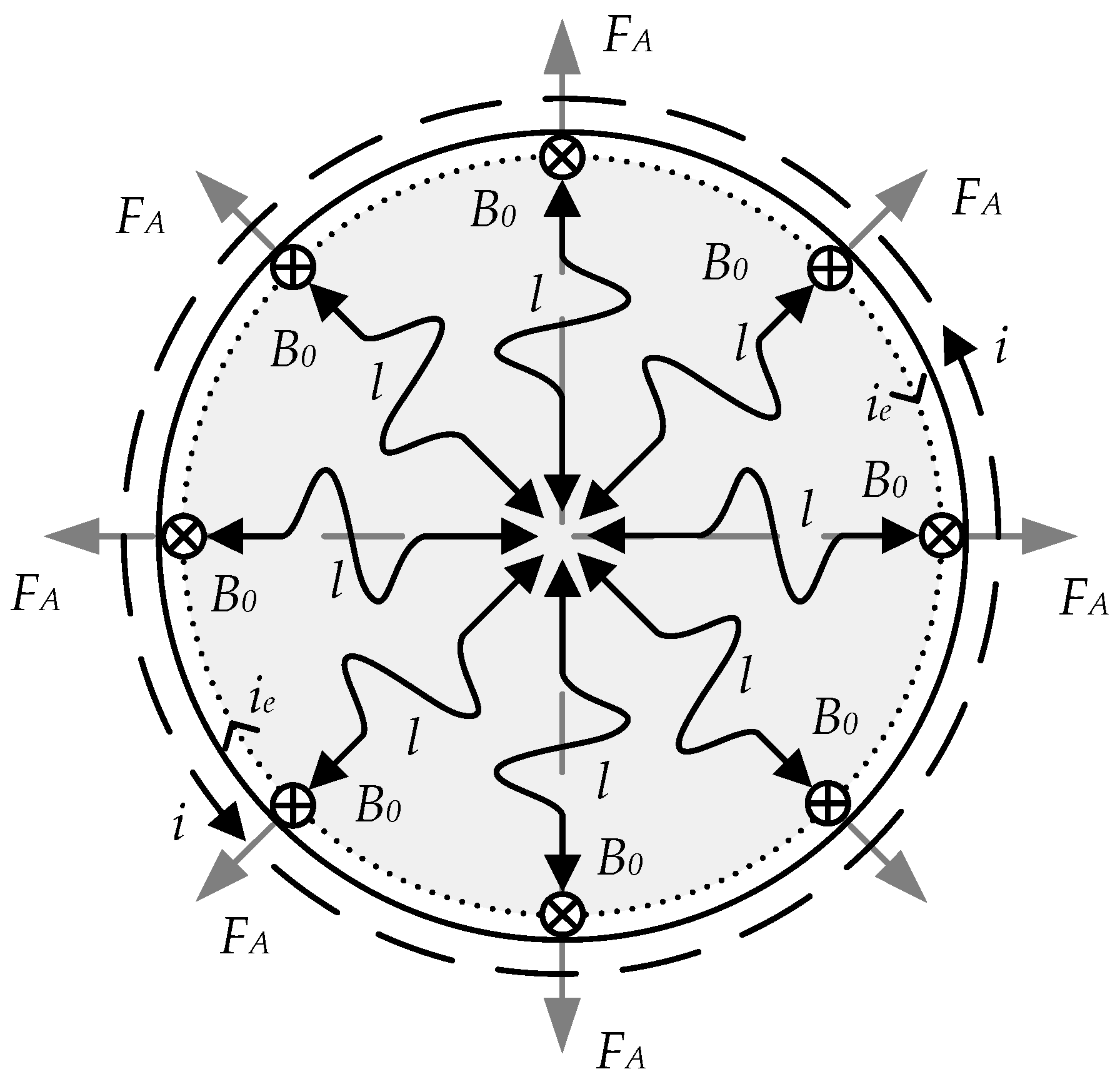
The EMA converter considered is characterized by the simultaneous emission of elastic waves from each point of the surface of the core’s FC-I and FC-II structural elements, located, respectively, under MC1 and MC2. Thus, waves propagate in the object cross-section in all radial directions.
The process of longitudinal
L-waves propagation over the cylindrical core cross-section based upon the electrodynamic interaction mechanism is shown in
Figure 3.
The predominant excitation of a single wave type is determined by the mutual orientation of the bias field with induction B0 and eddy currents ie flowing along the core element perimeter.
When both longitudinal- and transverse-plane monochromatic acoustic waves are excited, the equation of forced acoustic oscillations propagating from the interface can be written as follows [
30,
31]:
where
H0 is the PM field strength vector magnitude;
j is the skin layer AC density vector value;
is the displacement vector;
v is the acoustic wave speed in the ferrite rod material; ρ is the ferrite rod material specific density;
c is the speed of light.
Assuming that the variable magnetic (Emicon excitation) field changes according to the law exp [
i × (ω
t −
k ×
z)], the skin layer AC density can be expressed as follows:
where
Hm is the variable magnetic field amplitude;
is the metal conductivity; ω is the cyclic frequency.
At the distances exceeding the skin layer thickness, considering (8), the solution for Equation (9) will take the form:
where β =
q2 × δ
2/2,
q = 2π/λ, and λ is the acoustic wavelength.
In magnetically ordered media, the acoustic wave propagation is associated with the conversion of waves at domain walls and the excitation of coupled magnetoelastic oscillations
q(
kn,
t) accompanied by magnetization ones:
where λ is a coefficient depending on the magnetoelastic tensor magnitude, the wave vector
kn, and the difference between the spin and elastic wave frequencies.
Considering (11) and (12), as well as based on the fact that the magnetic susceptibility χ =
J/H and μ = 1 + χ, one can write:
Therefore, similarly to (6) and according to (12) and (13), the following will be true for the μ-modulation mode due to the EMA effect:
where
is the displacement function of structural components of the material of the rod ferromagnetic system’s 1′ and 1″ elements;
is the function describing the law of change in the magnetic permeability of the material of the rod ferromagnetic system’s 1′ and 1″ elements under an exciting acoustic field, which, at a given excitation field amplitude, can be considered as the time function
.
Considering the joint modulating impact of acoustic and variable magnetic fields on the magnetic permeability of the core’s FC-I and FC-II element material, write the following equation:
Note that for the considered physical processes, modulation is understood as a change in the state of the magnetic permeability of the core’s FC-I and FC-II element material when exposed to physical fields.
According to the existing parametric theory of fluxgates with longitudinal excitation, applying the small-impact Taylor series expansion of
B(
HΣ) at
HΣ =
H(t) +
H0, and considering that for our case, the function
is even, we can write:
where
and
are the depths of, respectively, acoustic and magnetic modulation; η
AM and η
MM are factors of, respectively, the acoustic magnetic and magnetic modulation conversions; ω
P is the conversion excitation cyclic frequency at coincident frequencies of electromechanical and magnetic resonances.
From Equations (15) and (16), it follows that the PM constant magnetic field
H0(t) directed axially to FC
1 and FC
2 is converted into a variable magnetic field with the corresponding induction by the oscillating magnetic permeability of the ferromagnetic material of FC
1 and FC
2 due to parametric modulation:
Variations in the PM magnetic field, caused now by modulating processes of magnetic permeability, affect, respectively, the MC
1 and MC
2 windings, inducing the corresponding EMF in them:
Substituting (17) into (18), for each of the measuring coils, we finally obtain:
- −
for MC2
Further, based on (19) and (20), for the difference data signal from MC
1 and MC
2 relative to the ‘case’, we obtain:
Considering that
and
, as well as the results of analysis (5), Equation (21) can be transformed as follows:
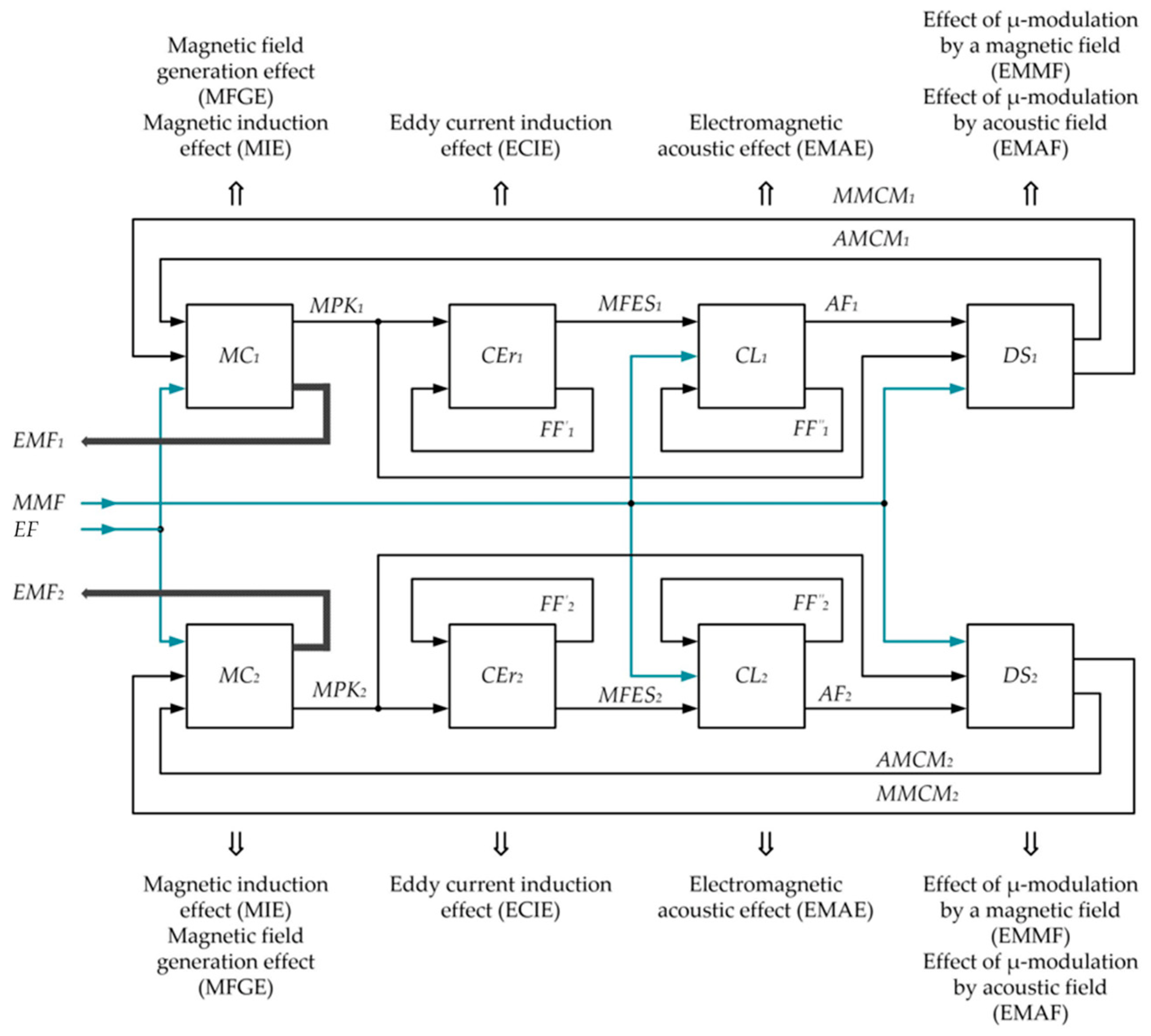
The resulting analytical expression (22) shows a clear implementation of the superposition principle in the form of a bifactorial additive modulating impact of two manifested basic physical effects initiated by the relevant activating physical fields, which, in turn, indicates an improved efficiency of the μ-modulation in general and the process variability depending on the availability of a flaw manifested in the parameter .
4. Key FS Operating Modes
In summary, one can state that the specifics of the described FS version are the availability of five combined operating modes: 1—the bridge inductive-capacitive voltage divider mode; 2—the inductor mode, where MC1 and MC2 measuring coils, along with their direct purpose, function additionally as the elements generating an exciting variable magnetic field; 3—the mode of μ-modulation due to the MM effect; 4—the EMA-converter mode, implementing the occurrence of spatially periodic acoustic waves; 5—the mode of μ-modulation due to the EMA effect.
Consider simplistically the major specifics of the aforementioned FS operating modes.
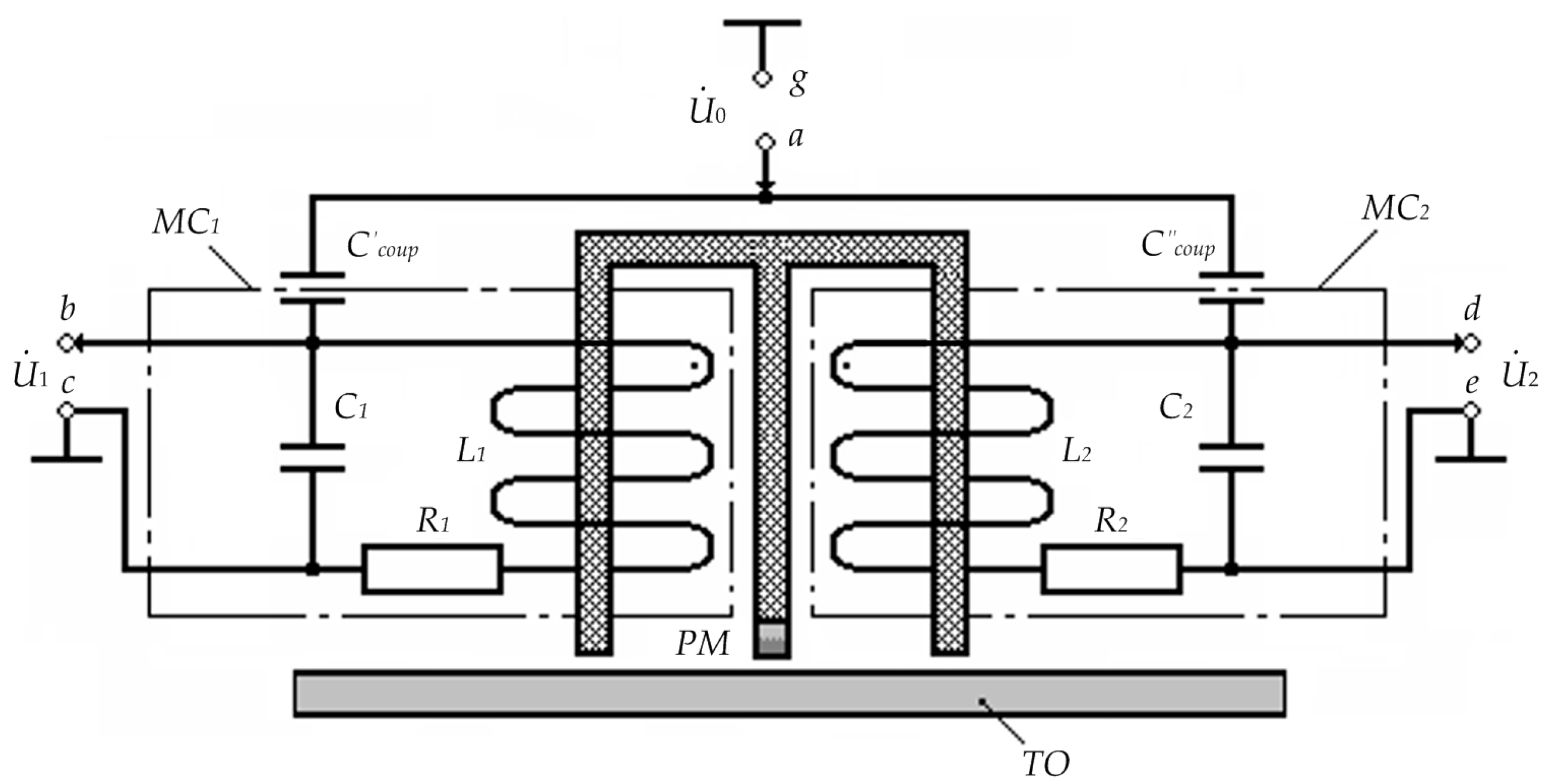
1. The bridge inductive-capacitive voltage divider mode.
Figure 4 shows the circuit diagram of the substitution and inclusion of the considered FS version for the considered operating mode.
In
Figure 4:
is the complex harmonic supply voltage of measuring coils; PM is the constant magnet inducing longitudinal magnetic fields in the core’s FC
1 and FC
2 elements with induction B
0; C
1 and C
2 are inter-turn capacitances of, respectively, MC
1 and MC
2 windings; R
1 and R
2 are active resistances of, respectively, MC
1 and MC
2 windings; L
1 and L
2 are inductances of, respectively, MC
1 and MC
2 windings;
are coupling capacitors of, respectively, MC
1 and MC
2 windings, which are, structurally, capacitors with parasitic capacitances formed by a copper cylindrical electrode with coaxially located core elements and the first lower rows of, respectively, MC
1 and MC
2 windings.
In this case, the excitation voltage u0 = U0max·sin ωt (corresponding complex magnitude—) is applied to MC1 and MC2 windings through, respectively, , which are also electrical parameters of MC1 and MC2, and output signals and are read from respective input ends of MC1 and MC2 windings.
Assume that with a symmetrical MC
1 and MC
2 arrangement,
. Then, considering that
and
are complex resistances of, respectively, MC
1 and MC
2;
and
are complex resistances of inter-turn capacitances of, respectively, MC
1 and MC
2;
and
are complex resistances of the coupling capacitors of, respectively, MC
1 and MC
2, for the considered FS type, we will have:
where
;
l is the length of the overlapped part of the coupling capacitor plates;
d1 and
d2 are diameters of, respectively, the inner and outer coupling capacitor plates.
In the case when a TO made of a homogeneous structure or structural local uniformity material is in the working area of FC1 and FC2 and considering the aforementioned comments, for common-mode output signals and from, respectively, the output ends of measuring coils MC1 and MC2 (inductive elements of a bridge voltage divider), the condition will always be met, and .
2. The inductor mode, when the AC flow through windings of measuring coils MC1 and MC2 induces variable magnetic (excitation) fields in the material of the core’s FC1 and FC2 elements.
3. The mode of μ-modulation due to the MM effect.
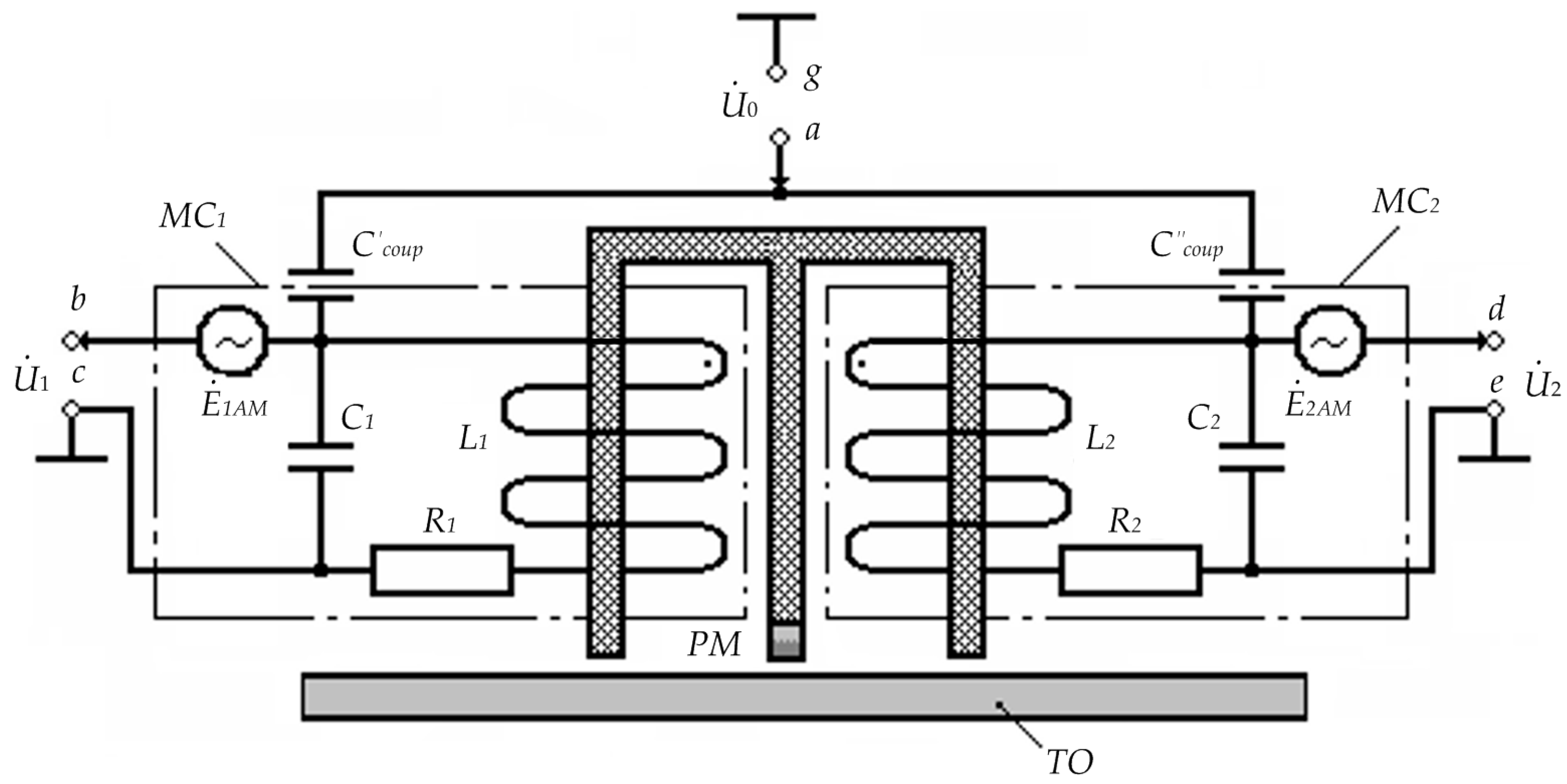
Figure 5 shows the circuit diagram of the substitution and inclusion for the considered operating mode.
In this FS operating mode, the auxiliary magnetic fields induced in the ferrite cores of the FS half-elements modulate the magnetic permeability of these cores, which, in turn, accordingly variates the magnetic induction B0 of the PM magnetic field, inducing corresponding common-mode magnetic modulation EMFs and in measuring coils MC1 and MC2.
For the time-combined first, second, and third FS operating modes accompanied by corresponding physical effects, the difference between
and
is determined by the following equation:
For the case when a TO made of a material with a homogeneous structure is in the working area of FC1 and FC2 and considering the aforementioned comments, at the output ends of measuring coils MC1 and MC2, we will have , i.e., ; when structural inhomogeneity occurs in the TO material in the working area of FC1 and FC2, and , i.e., .
4. The EMA converter mode. In this FS operating mode, the AC flow through windings of measuring coils MC1 and MC2 excites eddy currents on the surface of the conductive magnetic material, which, under a static magnetic field of the appropriate direction, are affected by forces transmitted subsequently to the crystal lattice through collisions and other interactions. As a reaction to such forces, spatially periodic acoustic waves arise in the structure of the conductive magnetic material.
5. The mode of μ-modulation due to the EMA effect.
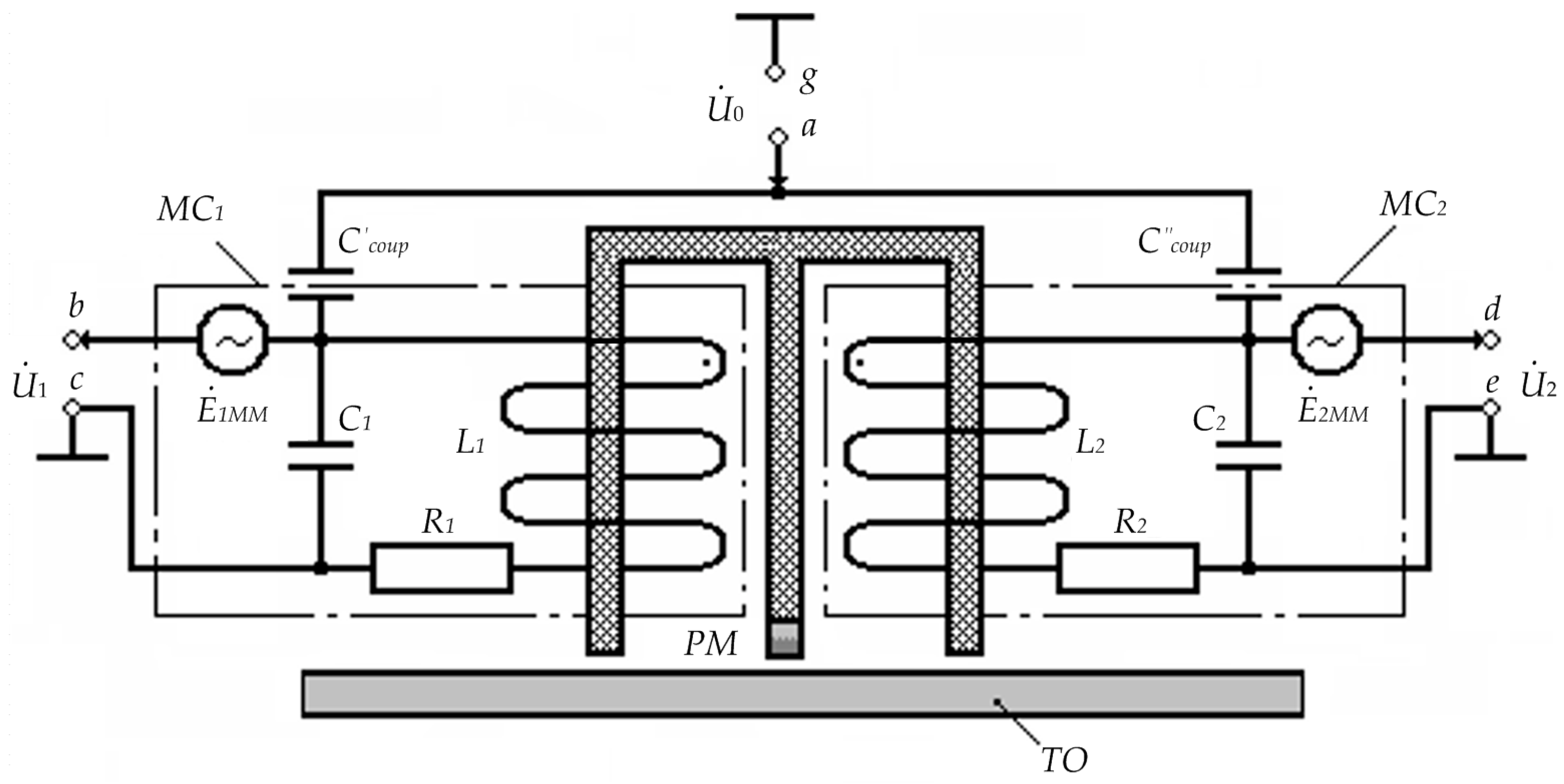
Figure 6 shows the circuit diagram of the proposed FS version substitution and inclusion for the considered operating mode.
In this case, spatially periodic acoustic waves mechanically affect the domain system of the conductive magnetic material structure of the core’s FC1 and FC2 elements, thereby modulating the magnetic permeability of their material. Herewith, it should be noted that the resulting mechanical stresses significantly affect the magnetization state.
The resulting variations in the magnetic induction B0 of the PM magnetic field induce the corresponding common mode relative to the ‘case’ acoustic modulation EMFs and in measuring coils MC1 and MC2.
For the time-combined first, fourth, and fifth FS operating modes accompanied by corresponding physical effects, the difference between
and
can be expressed as follows:
For the case when a TO made of a material with a homogeneous structure is in the working area of FC1 and FC2 and considering the aforementioned comments, at the output ends of measuring coils MC1 and MC2, we will have , i.e., .
When structural inhomogeneity occurs in the TO material in the working area of FC
1 and FC
2,
and
, i.e.,
For all the five time-combined FS operating modes, we can write an equation:
For the case when a TO made of a material with a homogeneous structure is in the working area of FC1 and FC2 and considering the aforementioned comments, at the output ends of measuring coils MC1 and MC2, we will have , , and , i.e., .
When structural inhomogeneity occurs in the TO material in the working area of FC
1 and FC
2,
,
,
, and
, i.e.,
where
;
.
The analysis of Equation (28) shows that when structural inhomogeneity (flaw) occurs in the material in the working area of FC1 and FC2, the difference signal from the MC1 and MC2 outputs will be determined by two major realizable physical effects (EMA and MM), which allows for detecting the structural inhomogeneity in the TO material reliably.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}