
Cross-Coupled Sliding Mode Synchronous Control for a Double Lifting Point Hydraulic Hoist

Abstract
:1. Introduction
2. Problem Formulation and Dynamic Models
3. Adaptive Sliding Mode Synchronous Control (ASMSC)
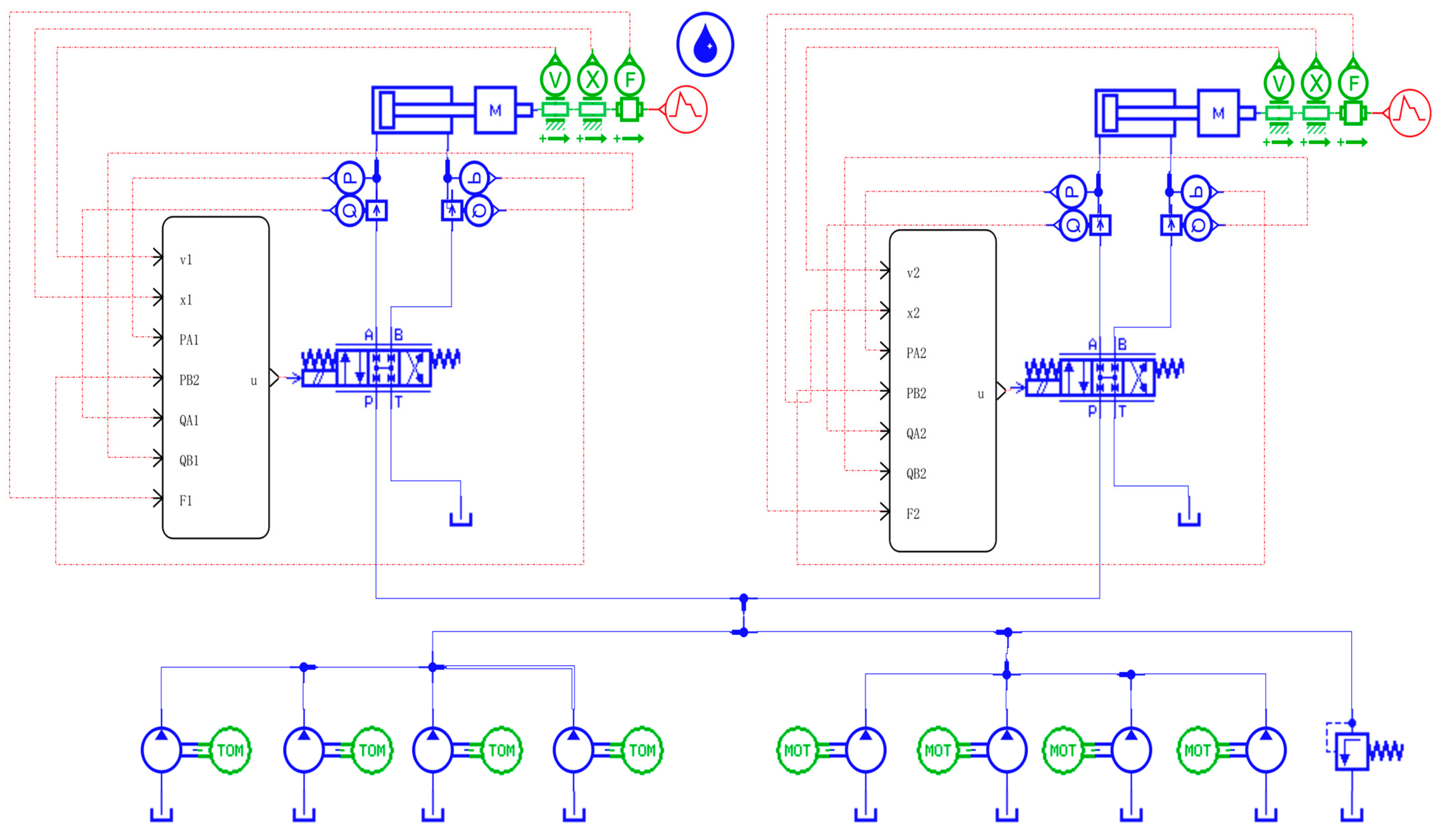
3.1. Co-Simulation AMESim Model of Hoist Synchronization System
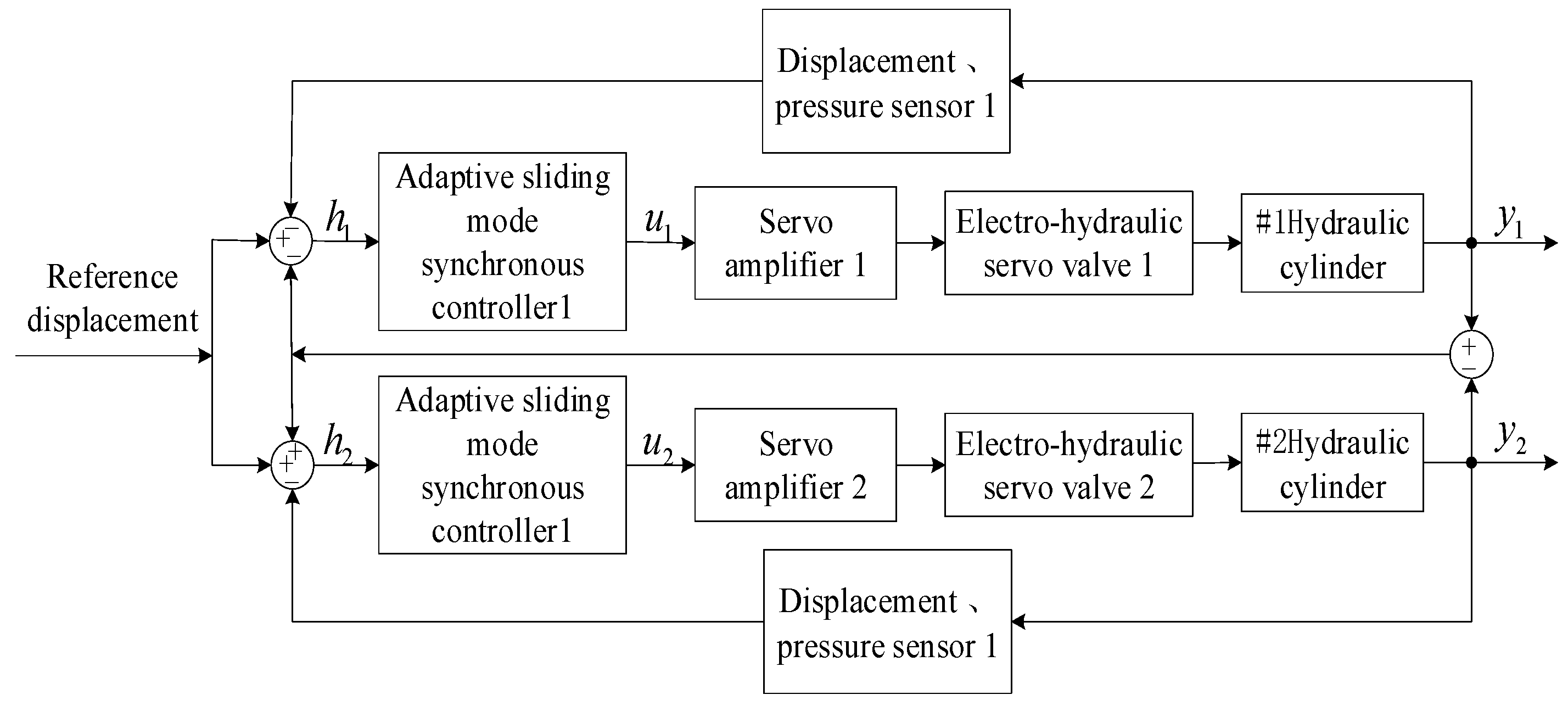
3.2. Synchronous Controller Design
3.3. Synchronous Controller Stability Analysis
4. Simulation Analysis
4.1. Parallel Synchronization Control
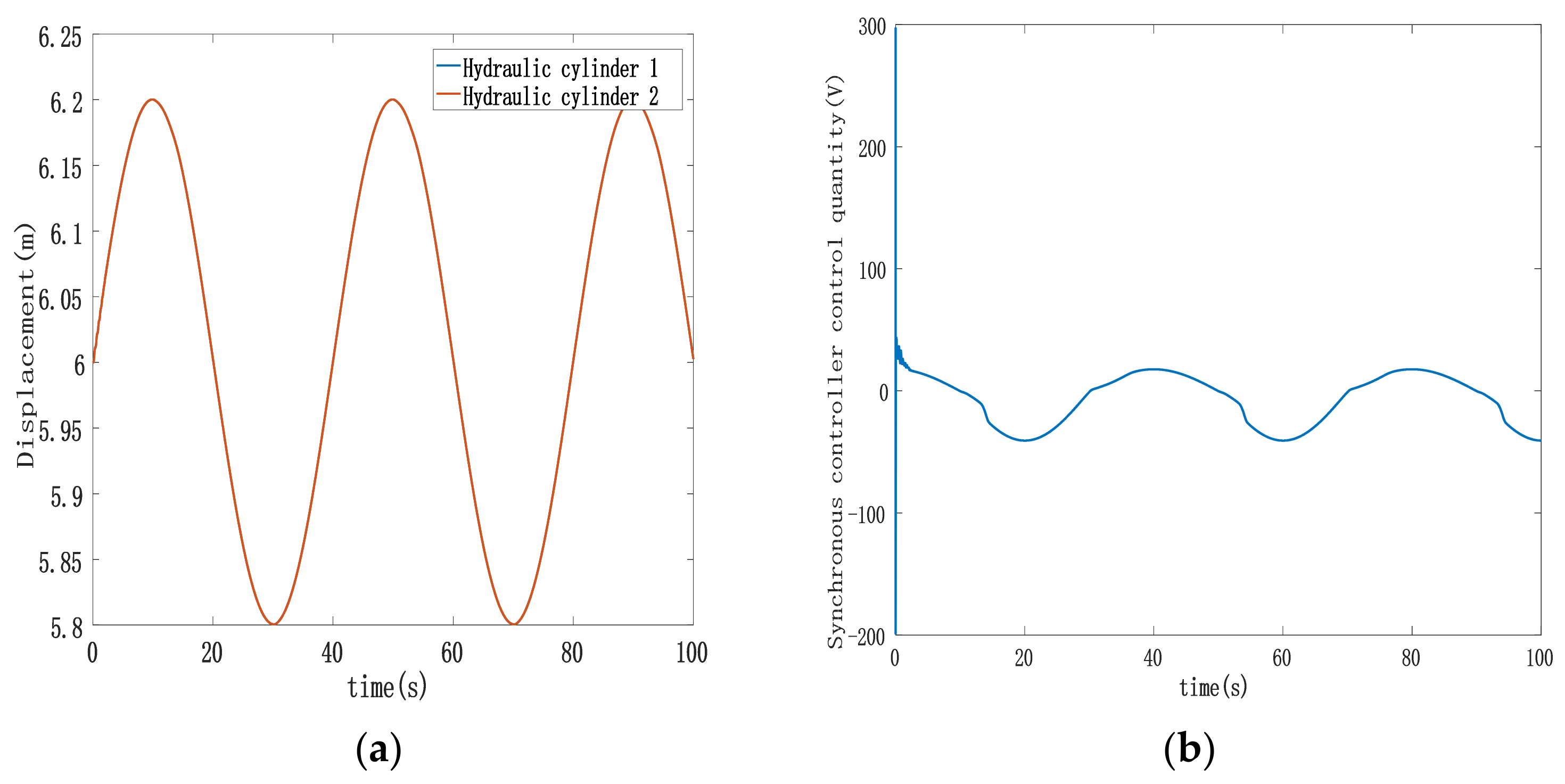
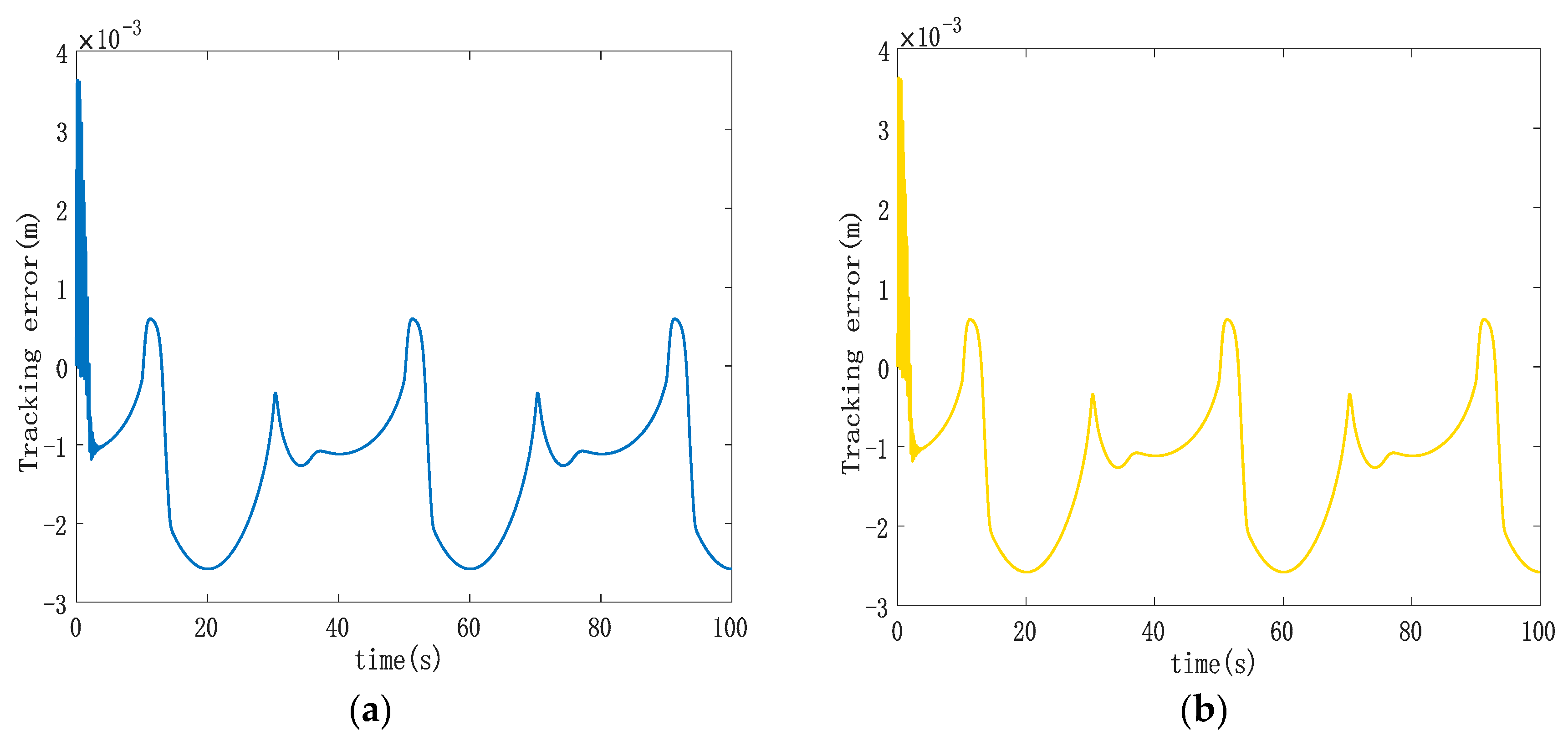
4.2. Simulation Analysis of Double-Cylinder Sliding Mode Cross-Coupling Synchronous Control
4.3. Synchronous Controller Robustness Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Feng, H.; Ma, W.; Yin, C.; Cao, D. Trajectory control of electro-hydraulic position servo system using improved PSO-PID controller. Autom. Constr. 2021, 127, 103722–103735. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J. Extended-state-observer-based adaptive control of electrohydraulic servomechanisms without velocity measurement. IEEE/ASME Trans. Mechatron. 2019, 25, 1151–1161. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems with Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- He, Y.; Wang, J.; Hao, R. Adaptive robust dead-zone compensation control of electro-hydraulic servo systems with load disturbance rejection. J. Syst. Sci. Complex. 2015, 28, 341–359. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J. Output feedback control of electro-hydraulic servo actuators with matched and mismatched disturbances rejection. J. Frankl. Inst. 2019, 356, 9152–9179. [Google Scholar] [CrossRef]
- Wang, X.; Feng, Y.; Sun, Y. Research on improved active disturbance rejection control of continuous rotary motor electro-hydraulic servo system. J. Cent. South Univ. 2020, 27, 3733–3743. [Google Scholar] [CrossRef]
- Qian, P.; Pu, C.; He, D.; Lv, P.; Ruiz Páez, L.M. A method to improve the motion trajectory tracking accuracy of pneumatic servo system—By exciting longitudinal resonance. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 376. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, D.; Liu, F.; Liu, Q.; Zhang, Z. ADRC for Electro-hydraulic Position Servo Systems Based on Dead-zone Compensation. China Mech. Eng. 2021, 32, 1432–1441. [Google Scholar]
- Jin, K.; Song, J.; Li, Y.; Zhang, Z.; Zhou, H.; Chang, X. Linear active disturbance rejection control for the electrohydraulic position servo system. Sci. Prog. 2021, 104, 1–30. [Google Scholar] [CrossRef]
- Mehta, U.; Aryan, P.; Raja, G.L. Tri-parametric fractional-order controller design for integrating systems with time delay. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 4166–4170. [Google Scholar] [CrossRef]
- Prusty, S.B.; Seshagiri, S.; Pati, U.C.; Mahapatra, K.K. Sliding mode control of coupled tank systems using conditional integrators. IEEE/CAA J. Autom. Sin. 2019, 7, 118–125. [Google Scholar] [CrossRef]
- Seshagiri, S.; Krishnan, N.; Bratt, J. Sliding Mode Control for Permanent Magnet Synchronous Motors Using Conditional Integrators. In Proceedings of the IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 1700–1705. [Google Scholar]
- Cheng, C.; Liu, S.; Wu, H. Sliding mode observer-based fractional-order proportional–integral–derivative sliding mode control for electro-hydraulic servo systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 1887–1898. [Google Scholar] [CrossRef]
- Feng, H.; Song, Q.; Ma, S.; Ma, W.; Yin, C.; Cao, D.; Yu, H. A new adaptive sliding mode controller based on the RBF neural network for an electro-hydraulic servo system. ISA Trans. 2022, 129, 472–484. [Google Scholar] [CrossRef]
- Zhao, L.Z. Hydraulic System Design and Control Performance Research of Wind Turbine Turning. Master’s Thesis, Shenyang University of Technology, Shenyang, China, 2022. [Google Scholar]
- Tian, Y. Study on Synchronization System of Hydraulic Cylinders with Opposite Movement. Master’s Thesis, Changchun University of Technology, Changchun, China, 2009. [Google Scholar]
- Zhao, C.Y.; Duan, W.H.; Jiang, M.C.; Wang, Y.H. Self-synchronization Theory of Pile Sinking System Driven by Dual Hydraulic Motors. Northeast. Univ. 2022, 43, 1446–1452+1483. [Google Scholar]
- Sun, X. Research on Force Synchronization Control Strategy of Double Hydraulic Cylinder. Master′s Thesis, Harbin University of Technology, Harbin, China, 2020. [Google Scholar]
- Liu, F. Research on the Synchronization Control for the Proportional Valve Controlled Hydraulic Cylinder. Master’s Thesis, Beijing Institute of Technology, Beijing, China, 2016. [Google Scholar]
- Utkin, V.I.; Poznyak, A.S. Adaptive sliding mode control with application to supertwist algorithm: Equivalent control method. Automatica 2013, 49, 39–47. [Google Scholar] [CrossRef]
- Krishnan, P. A review of the non-equivalent control group post-test-only design. Nurse Res. 2023, 31, 37–40. [Google Scholar] [CrossRef]
- Doukhi, O.; Lee, D.J. Neural network-based robust adaptive certainty equivalent controller for quadrotor UAV with unknown disturbances. Int. J. Control Autom. Syst. 2019, 17, 2365–2374. [Google Scholar] [CrossRef]
- Rehman, W.U.; Wang, S.; Wang, X.; Fan, L.; Shah, K.A. Motion synchronization in a dual redundant HA/EHA system by using a hybrid integrated intelligent control design. Chin. J. Aeronaut. 2016, 29, 789–798. [Google Scholar] [CrossRef]
- Zhang, L.D.; Li, Y.S. Synchronous Control of Double Hydraulic Cylinders of Scissors Aerial Work Platform Based on Fuzzy PID. In Proceedings of the IEEE 2020 5th International Conference on Electromechanical Control Technology and Transportation (ICECTT), Nanchang, China, 15–17 May 2020; pp. 349–354. [Google Scholar]
- Liu, X.; Shan, Z.; Yang, F.; Li, J. Research on Key Problems of Synchronous Control of Hydraulic System Based on Particle Swarm Fuzzy PID. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, China, 6–9 August 2023; pp. 1732–1737. [Google Scholar]
- Li, X.; Yang, T.; Li, W.; Brennan, M.J.; Zhu, M.; Wu, L. On the adaptive synchronous control of a large-scale dual-shaker platform system. J. Vib. Control 2023, 29, 1644–1655. [Google Scholar] [CrossRef]
- Noguchi, N.; Will, J.; Reid, J.; Zhang, Q. Development of a master–slave robot system for farm operations. Comput. Electron. Agric. 2004, 44, 1–19. [Google Scholar] [CrossRef]
- Wang, C.; Li, X.; Guo, L.; Li, Y. A seamless operation mode transition control strategy for a microgrid based on master-slave control. Sci. China Technol. Sci. 2012, 55, 1644–1654. [Google Scholar] [CrossRef]
- Caldognetto, T.; Tenti, P. Microgrids operation based on master–slave cooperative control. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1081–1088. [Google Scholar] [CrossRef]
- Yang, H.; Hu, S.; Gong, G.; Hu, G. Electro-hydraulic proportional control of thrust system for shield tunneling machine. Autom. Constr. 2009, 18, 950–956. [Google Scholar]
- Chen, T.H.; Li, H.X. Research on Synchronous Fuzzy Control of Duplex Hydraulic Piston Trajectory. Mach. Tool Hydraul. 2017, 45, 146–148. [Google Scholar] [CrossRef]
- Kuang, Z.; Gao, H.; Tomizuka, M. Precise linear-motor synchronization control via cross-coupled second-order discrete-time fractional-order sliding mode. IEEE/ASME Trans. Mechatron. 2020, 26, 358–368. [Google Scholar] [CrossRef]
- Chen, S.Y.; Chen, C.S.; Yang, Z.W. Self-tuning cross-coupled two degree-of-freedom PID control for position synchronization of dual linear motors. Appl. Math. Model. 2018, 64, 214–234. [Google Scholar] [CrossRef]
- Chen, C.Y.; Liu, L.Q.; Cheng, C.C.; Chiu, G.T.C. Fuzzy controller design for synchronous motion in a dual-cylinder electro-hydraulic system. Control Eng. Pract. 2008, 16, 658–673. [Google Scholar] [CrossRef]
- Yao, J.; Cao, X.; Zhang, Y.; Li, Y. Cross-coupled fuzzy PID control combined with full decoupling compensation method for double cylinder servo control system. J. Mech. Sci. Technol. 2018, 32, 2261–2271. [Google Scholar] [CrossRef]
- Yang, L.; Cen, Y.W.; Ye, X.H.; Huang, J.Z. Synchronous Control Research for Hydraulic Bending Machine Based on Single Neuron PID Strategy. Mach. Tool Hydraul. 2017, 45, 119–123. [Google Scholar]
- Zhang, L.; Feng, J.; Qiu, W.; Zhang, L. Experiment and Simulation Research on Synchronization Control of Shaking Tables System Based on Adaptive Sliding Mode Controller. J. Vib. Eng. Technol. 2023, 11, 1623–1645. [Google Scholar] [CrossRef]
- Cao, Y.; Li, Q.M.; Wu, G.Q.; Qiu, K.W.; Yu, R.C. The research progress of hydraulic synchronization system. Mod. Manuf. Eng. 2014, 410, 136–140. [Google Scholar]
- Chen, Z.J.; Ding, Z.; He, H.N. Design analysis and improvement of hydraulic synchronous system of HSM coil lifting table. Metal. Ind. Autom. 2020, 44, 74–78. [Google Scholar]
- Xia, Y.M.; Shi, Y.P.; Yuan, Y.; Zhang, Y.M.; Yao, Z.W. Analyzing of influencing factors on dynamic response characteristics of double closed-loop control digital hydraulic cylinder. Adv. Mech. Des. Syst. 2019, 13, 59–76. [Google Scholar] [CrossRef]
- Liao, L.; Xiang, G.F.; Zheng, X.J.; Zhu, Y.Q.; Xiao, Q.; Dian, S.Y. Synchronous Control of Parallel-Hydraulic System Based on Linear Active Disturbance Rejection. Modul. Mach. Tool Autom. Manuf. Tec. 2023, 588, 60–63+68. [Google Scholar]
- Aghababa, M.P.; Akbari, M.E. A chattering-free robust adaptive sliding mode controller for synchronization of two different chaotic systems with unknown uncertainties and external disturbances. Appl. Math. Comput. 2012, 218, 5757–5768. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electro-Hydraulic System and Controller-Related Parameters | Value |
|---|---|
| 1.2 × 105 kg | |
| K | 4 × 103 N/m |
| 8 × 108 Pa | |
| 7.85 × 10−1 m2 | |
| 1.49 × 10−1 m2 | |
| 4.71 × 10−3 m3 | |
| 3.59 × 10−3 m3 | |
| 2 × 10−11 m3/s·Pa | |
| 6.074 × 10−2 L/(min·V·Pa1/2) | |
| 2.5 × 107 Pa | |
| 0 Pa | |
| 7 × 106 Pa | |
| 2 × 102 | |
| 2.55 × 106 | |
| 2.2 × 105 | |
| 5 | |
| 2 × 10 | |
| 1 | |
| 1 × 10−1 | |
| 1 × 10−1 | |
| 2 × 10−1 | |
| 8 × 10−1 | |
| 3 × 102 | |
| 5 × 10−3 | |
| 5 × 10−2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, C.; Dong, X.; Li, J. Cross-Coupled Sliding Mode Synchronous Control for a Double Lifting Point Hydraulic Hoist. Sensors 2023, 23, 9387. https://doi.org/10.3390/s23239387
Sun C, Dong X, Li J. Cross-Coupled Sliding Mode Synchronous Control for a Double Lifting Point Hydraulic Hoist. Sensors. 2023; 23(23):9387. https://doi.org/10.3390/s23239387
Chicago/Turabian StyleSun, Chungeng, Xiangxiang Dong, and Jipeng Li. 2023. "Cross-Coupled Sliding Mode Synchronous Control for a Double Lifting Point Hydraulic Hoist" Sensors 23, no. 23: 9387. https://doi.org/10.3390/s23239387
APA StyleSun, C., Dong, X., & Li, J. (2023). Cross-Coupled Sliding Mode Synchronous Control for a Double Lifting Point Hydraulic Hoist. Sensors, 23(23), 9387. https://doi.org/10.3390/s23239387