
Development of a Procedure for Torsion Measurement Using a Fan-Shaped Distance Meter System


Abstract
:1. Introduction
2. Torsion Measurement
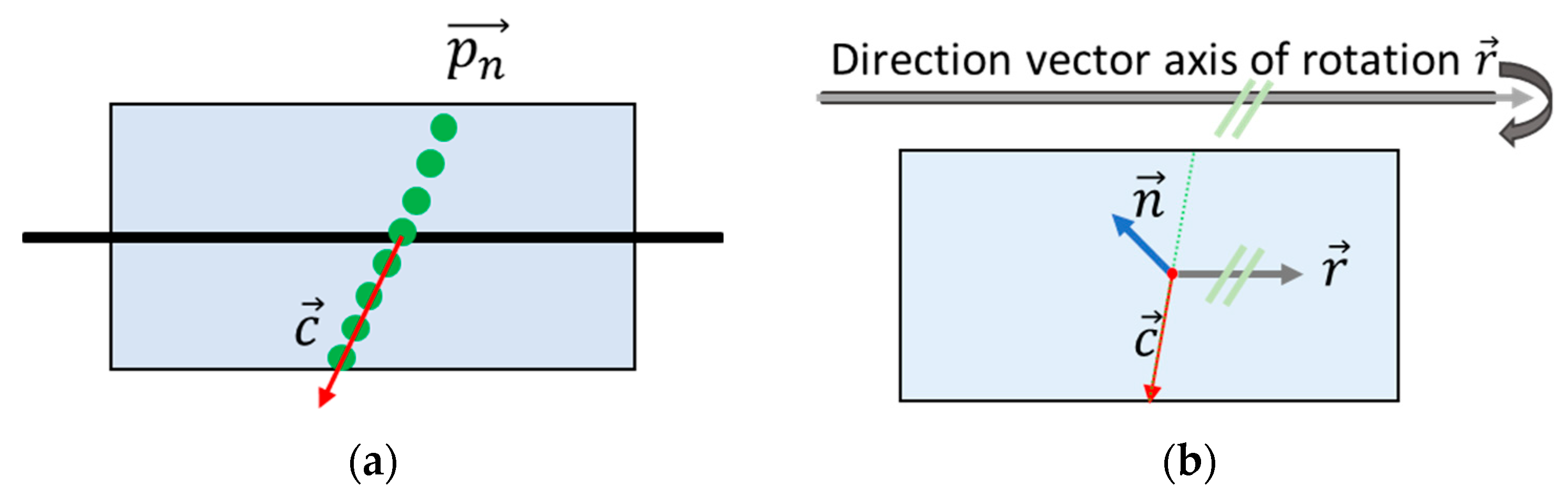
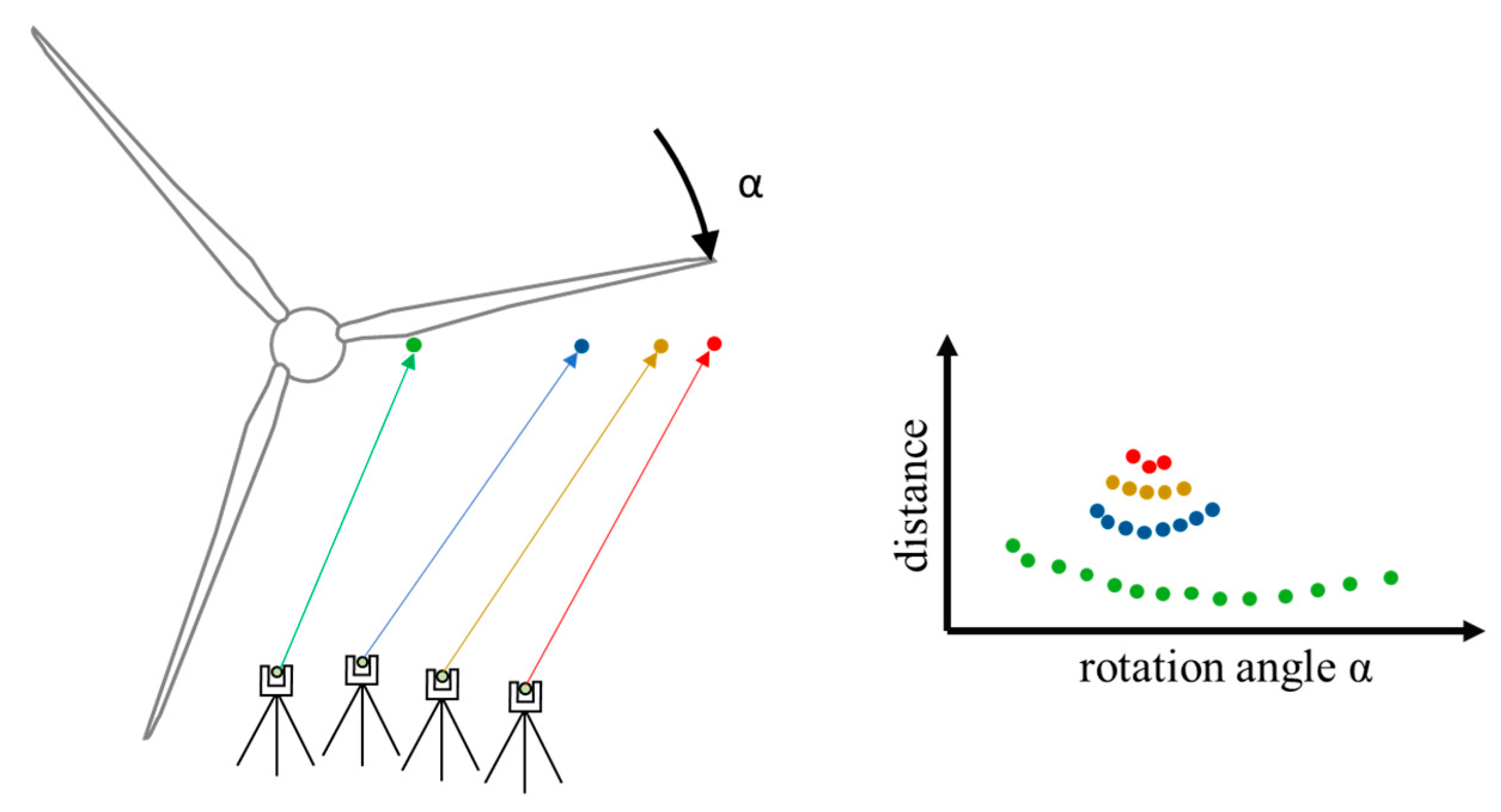
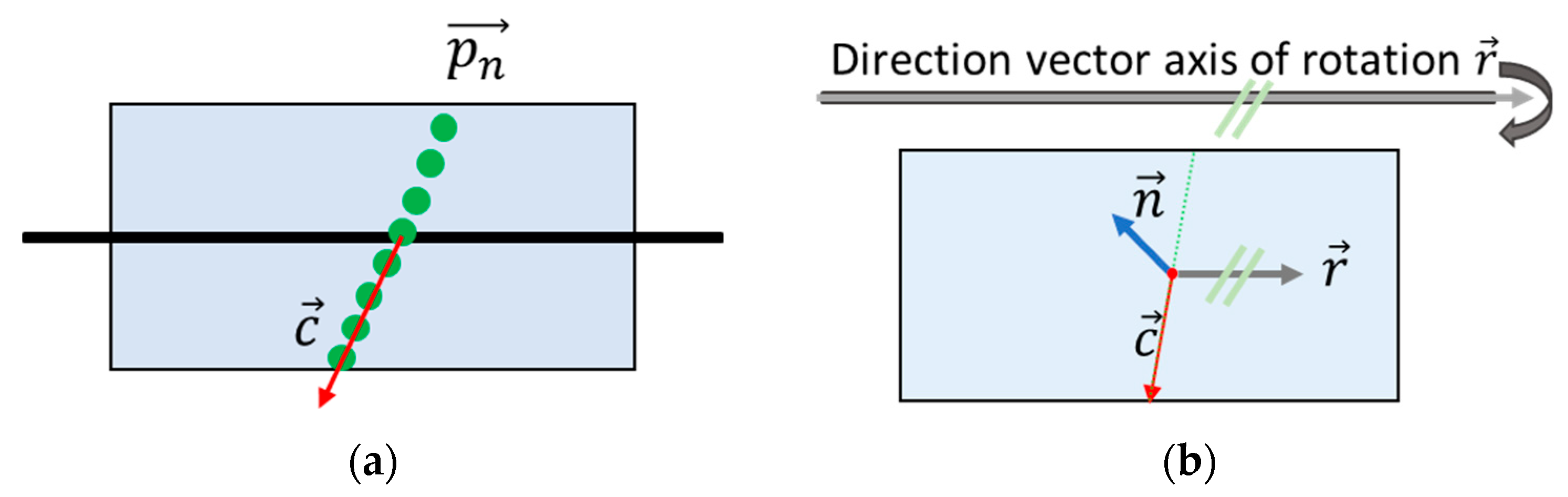
2.1. Concept
2.2. Simulation
3. Practical Implementation
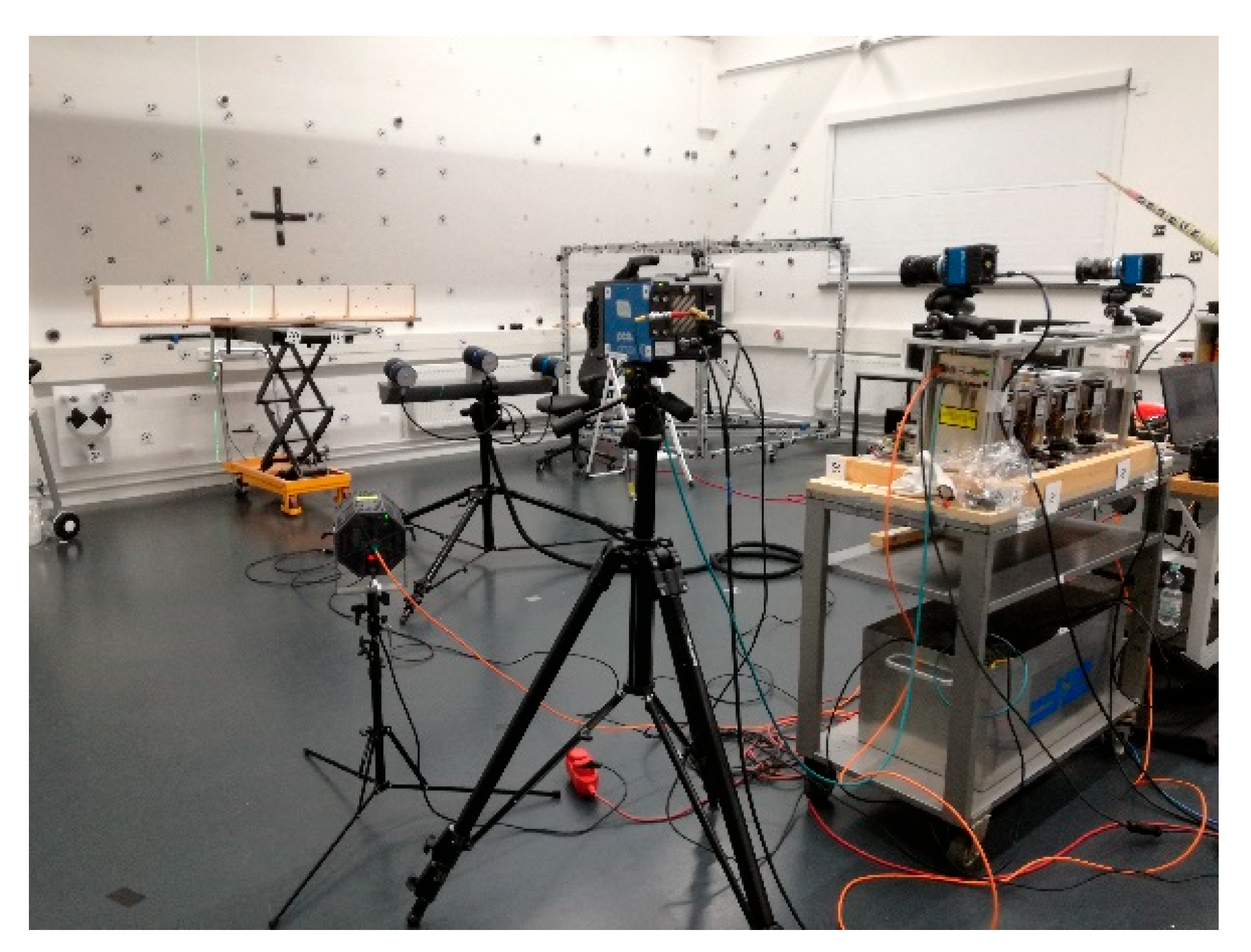
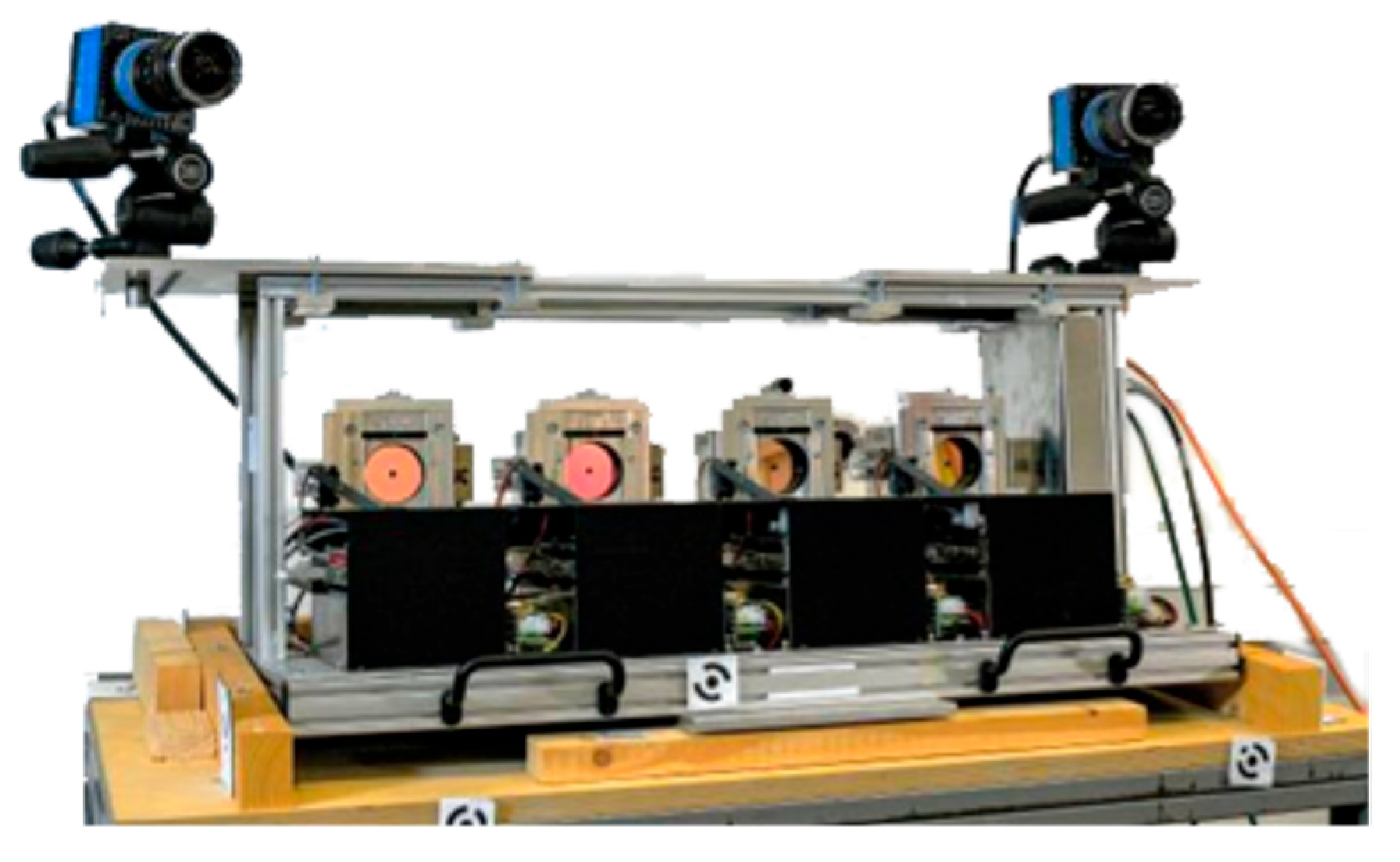
3.1. Measurement Setup and Data Acquisition
3.2. Comparison of the Rotation Angles φ
3.2.1. Comparison between Data Sets
3.2.2. Comparison within the Data Group
4. Discussion
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hafner, E. Rotorblatt für Windkraftanlagen, Insbesondere für Schwimmende Windkraftanlagen, Sowie Windkraftanlage Mit einem Rotorblatt. Deutsches Patent-und Markenamt 2009. Patent DE102007036917A1, 12 February 2009. [Google Scholar]
- Guma, G.; Bangga, G.; Lutz, T.; Krämer, E. Aeroelastic analysis of wind turbines under turbulent inflow conditions. Wind. Energy Sci. 2021, 6, 93–110. [Google Scholar] [CrossRef]
- de Goeij, W.C.; van Tooren, M.J.L.; Beukers, A. Implementation of bending-torsion coupling in the design of a wind-turbine rotor-blade. Appl. Energy 1999, 63, 191–207. [Google Scholar] [CrossRef]
- Márquez, F.P.G.; Tobias, A.M.; Pérez, J.M.P.; Papaelias, M. Condition monitoring of wind turbines: Techniques and methods. Renew. Energy 2012, 46, 169–178. [Google Scholar] [CrossRef]
- Willberg, C.; Ravi, R.; Rieke, J.; Heinecke, F. Validation of a 20 m Wind Turbine Blade Model. Energies 2021, 14, 2451. [Google Scholar] [CrossRef]
- Papadopoulos, K.; Morfiadakis, E.; Philippidis, T.P.; Lekou, D.J. Assessment of the strain gauge technique for measurement of wind turbine blade loads. Wind. Energy 2000, 3, 35–65. [Google Scholar] [CrossRef]
- Wernicke, J.; Shadden, J.; Kuhnt, S.; Byars, R.; Rhead, P.; Damaschke, M. Field experience of fibre optical strain sensors for providing real time load information from wind turbine blades during operation. In Proceedings of the European Wind Energy Conference, London, UK, 22–25 November 2004. [Google Scholar]
- Schroeder, K.; Ecke, W.; Apitz, J.; Lembke, E.; Lenschow, G. A fibre Bragg grating sensor system monitors operational load in a wind turbine rotor blade. Meas. Sci. Technol. 2006, 17, 1167. [Google Scholar] [CrossRef]
- Mayda, E.; Obrecht, J.; Dixon, K.; Zamora, A.; Mailly, L.; Sievers, R.; Singh, M. Wind Turbine Rotor R&D—An OEM Perspective, In Proceedings of the International Conference on Future Technologies for Wind Energy, Laramie, WY, USA, 7–9 October 2013.
- Russhard, P. Development of a Blade Tip Timing Based Engine Health Monitoring System; The University of Manchester: Manchester, UK, 2010. [Google Scholar]
- Nidec BladeVision—Sensors & Actuators. Available online: https://www.nidec-industrial.com/products/sensors-and-actuators/bladevision (accessed on 12 July 2023).
- Russhard, P. The rise and fall of the rotor blade strain gauge. In Vibration Engineering and Technology of Machinery: Proceedings of VETOMAC X 2014, Manchester, UK, 9–11 September 2014; Springer International Publishing: Cham, Switzerland, 2014; pp. 27–37. [Google Scholar]
- Anantharaman, A.; Centurelli, G.; Schneemann, J.; Bot, E.; Kühn, M. Comparison of near wind farm wake measurements from scanning lidar with engineering models. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2022; Volume 2265, p. 022034. [Google Scholar]
- Winstroth, J.; Schoen, L.; Ernst, B.; Seume, J.R. Wind turbine rotor blade monitoring using digital image correlation: A comparison to aeroelastic simulations of a multi-megawatt wind turbine. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2014; Volume 524, p. 012064. [Google Scholar]
- Corten, G.B. Optical Motion Analysis of Wind Turbines. In Proceedings of the European Union Wind Energy Conference, Goeteborg, Sweden, 20–24 May 1996. [Google Scholar]
- Corten, G.P.; Sabel, J.C. Optical motion analysis of wind turbines: The pilot experiment with the Delft 10 [m] diameter wind turbine. In Proceedings of EUWEC, the European Union Wind Energy Conference and Exhibition; Ehmann, H., Zervos, A., Helm, P., Eds.; Bedford (UK): Stephens, UK, 1996; pp. 875–877. [Google Scholar]
- Sabel, J.C. Optical 3D motion measurement. In Quality Measurement: The Indispensable Bridge between Theory and Reality (No Measurements? No Science! Joint Conference-1996: IEEE Instrumentation and Measurement Technology Conference and IMEKO Tec, Brussels, Belgium, 4–6 June 1996; IEEE: New York, NY, USA, 1996; Volume 1. [Google Scholar]
- Schmidt Paulsen, U.; Erne, O.; Schmidt, T. Wind Turbine Operational and Emergency Stop Measurements Using Point Tracking Videogrammetry. In Proceedings of the SEM Annual Conference and Exposition on Experimental and Applied Mechanics, Albuquerque, NM, USA, 1–4 June 2009. [Google Scholar]
- Özbek, M. Optical Monitoring and Operational Modal Analysis of Large Wind Turbines. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 13 June 2013. [Google Scholar]
- Shortis, M.R.; Robson, S.; Jones, T.W.; Goad, W.K.; Lunsford, C.B. Photogrammetric tracking of aerodynamic surfaces and aerospace models at NASA Langley Research Center. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 27–34. [Google Scholar] [CrossRef]
- Sicard, J.; Jayant, S. Measurement of the deformation of an extremely flexible rotor blade using digital image correlation. Meas. Sci. Technol. 2013, 24, 065203. [Google Scholar] [CrossRef]
- Winstroth, J.; Seume, J.R. Error Assessment of Blade Deformation Measurements on a Multi-Megawatt Wind Turbine based on Digital Image Correlation. In Proceedings of the ASME Turbo Expo 2015: Turbine Technical Conference and Exposition, GT2015, Montreal, QC, Canada, 12 August 2015. [Google Scholar]
- Lehnhoff, S.; Gómez González, A.; Seume, J.R. Full-scale deformation measurements of a wind turbine rotor in comparison with aeroelastic simulations. Wind. Energy Sci. 2020, 5, 1411–1423. [Google Scholar] [CrossRef]
- Research Wind Farm. Available online: https://windenergy-researchfarm.com/ (accessed on 13 October 2023).
- Jepping, C.; Luhmann, T. Deformations from image silhouettes using a kinematic finite element beam model. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 41–47. [Google Scholar] [CrossRef]
- Hesse, C.; Heer, R.; Horst, S.; Neuner, H. A concept for monitoring wind energy turbines with geodetic techniques. In Proceedings of the 3rd IAG/12th FIG Symposium, Baden, Germany, 22–24 May 2006; pp. 22–24. [Google Scholar]
- Paffenholz, J.-A.; Vennegeerts, H.; Kutterer, H. High Frequency Terrestrial Laser Scans for Monitoring Kinematic Processes. In Proceedings of the INGEO 2008—4th International Conference on Engineering Surveying, Bratislava, Slovakia, 23–24 October 2008. [Google Scholar]
- Gikas, V.; Daskalakis, S. Contribution of Combined RTS and TLS to Dynamic Monitoring of Wind Energy Turbines. In Proceedings of the 9th International Conference on Optical 3-D Measurement Techniques, Vienna, Austria, 1–3 July 2009. [Google Scholar]
- Mitka, B.; Klapa, P.; Gniadek, J. Use of Terrestrial Laser Scanning for Measurements of Wind Power Stations. Geomat. Environ. Eng. 2019, 13, 39–49. [Google Scholar] [CrossRef]
- Windcomp—The ROMEG Measuring Method. Available online: https://www.windcomp.com/description-of-the-measurement-method/?lang=en (accessed on 14 July 2023).
- Kaufmann, I.; Scherer-Klöckling, C.; Lutzmann, P.; Scherer-Negenborn, N.; Ebert, R. Remote laser vibrometry for wind turbine blades. SPIE Newsroom 2016. [Google Scholar] [CrossRef]
- Helming, P.; Poeck, N.; v Freyberg, A.; Sorg, M.; Fischer, A. Dynamic optical deformation measurements on wind turbines. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2022; Volume 2265, p. 022100. [Google Scholar]
- Helming, P.; Intemann, A.; Webersinke, K.P.; von Freyberg, A.; Sorg, M.; Fischer, A. Assessing the rotor blade deformation and tower-blade tip clearance of a 3.4 MW wind turbine with terrestrial laser scanning. Wind. Energy Sci. Discuss. 2022, 8, 421–431. [Google Scholar] [CrossRef]
- Ochieng, F.X. Ground-Based Radar in Structural Design, Optimization, and Health Monitoring of Stationary and Rotating Structures; Springer Nature: Berlin/Heidelberg, Germany, 2023. [Google Scholar] [CrossRef]
- Grosse-Schwiep, M.; Piechel, J.; Luhmann, T. Measurement of Rotor Blade Deformations of Wind Energy Converters with Laser Scanners. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2013, II-5/W2, 97–102. [Google Scholar] [CrossRef]
- Grosse-Schwiep, M.; Piechel, J.; Luhmann, T. Measurement of Rotor Blade Deformations of Wind Energy Converters with Laser Scanners. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2014; Volume 524, p. 1. [Google Scholar] [CrossRef]
- Goering, M.; Luhmann, T. Development of a Fan-Shaped Distance Meter System for Measuring Moving Rotor Blades—Concept, Photogrammetric Orientation and first results. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 2, 711–718. [Google Scholar] [CrossRef]
- Z+F IMAGER 5010. Available online: https://www.zofre.de/en/laser-scanners/3d-laser-scanner/z-f-imagerr-5010 (accessed on 19 July 2023).
- pco.dimax cs. Available online: https://www.pco.de/fileadmin/user_upload/pco-product_sheets/pco.dimax_cs_data_sheet.pdf (accessed on 14 July 2023).
- Luhmann, T.; Robson, S.; Kyle, S.; Boehm, J. Close-Range Photogrammetry and 3D Imaging, 4th ed.; Walter de Gruyter: Berlin, Germany, 2023; p. 820. [Google Scholar]
- Luhmann, T.; Große-Schwiep, M.; Hastedt, H. A comparison of close-range photogrammetry and laser scanning for deformation measurement of industrial tanks. In Proceedings Conference Geoinformatics, Surveying, Mine Surveying; National Technical University Donetsk: Donetsk, Ukraine, 2013. [Google Scholar]
- Willemsen, T. Multi-MEMS—Genauigkeitssteigerung gegenüber dem Einsatz einzelner Sensoren, In Photogrammetrie-Laserscanning-Optische 3D-Messtechnik: Beiträge der Oldenburger 3D-Tage 2020; Luhmann, T., Schumacher, C., Eds.; Wichmann: Lotte, Germany, 2020; pp. 132–144. [Google Scholar]
- Kern—NIVEL20—Precision Inclination Sensor. Available online: www.kern-aarau.ch/fileadmin/user_upload/Aldo/Wissen/FMuster_NIVEL20.pdf (accessed on 14 July 2023).
- Ozbek, M.; Rixen, D.J. Operational modal analysis of a 2.5 MW wind turbine using optical measurement techniques and strain gauges. Wind. Energy 2013, 16, 367–381. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plane | Data Group | |||||
|---|---|---|---|---|---|---|
| Vertical | Rotated | |||||
| 1 | 2 | 3 | 4 | 5 | ||
| 1 | Average FDMS [°] | 0.02 | 0.01 | 0.11 | 0.06 | 0.07 |
| Average MI [°] | 0.01 | 0.03 | 0.05 | 0.03 | 0.08 | |
| SRA FDMS [°] | 0.00 | 0.03 | 0.02 | 0.02 | 0.03 | |
| SRA MI [°] | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 | |
| 2 | Average FDMS [°] | 0.05 | 3.05 | 3.11 | 1.59 | 6.35 |
| Average MI [°] | 0.02 | 3.21 | 3.24 | 1.69 | 6.57 | |
| SRA FDMS [°] | 0.02 | 0.02 | 0.03 | 0.03 | 0.06 | |
| SRA MI [°] | 0.01 | 0.01 | 0.01 | 0.01 | 0.00 | |
| 3 | Average FDMS [°] | 0.03 | 3.08 | 5.48 | 4.82 | 13.59 |
| Average MI [°] | 0.01 | 3.28 | 5.70 | 5.06 | 13.91 | |
| SRA FDMS [°] | 0.01 | 0.03 | 0.06 | 0.06 | 0.11 | |
| SRA MI [°] | 0.00 | 0.05 | 0.01 | 0.01 | 0.01 | |
| Plane | Data Group | |||||
|---|---|---|---|---|---|---|
| Vertical | Rotated | |||||
| 1 | 2 | 3 | 4 | 5 | ||
| 1–2 | Average FDMS [°] | 0.49 | 2.52 | 2.50 | 2.13 | 6.92 |
| Average MI [°] | 0.40 | 3.11 | 3.12 | 1.86 | 6.75 | |
| SRA FDMS [°] | 0.04 | 0.00 | 0.05 | 0.03 | 0.09 | |
| SRA MI [°] | 0.01 | 0.01 | 0.00 | 0.01 | 0.00 | |
| 1–3 | Average FDMS [°] | 0.35 | 2.69 | 5.02 | 5.22 | 14.01 |
| Average MI [°] | 0.57 | 2.88 | 5.28 | 5.48 | 14.37 | |
| SRA FDMS [°] | 0.02 | 0.06 | 0.08 | 0.06 | 0.14 | |
| SRA MI [°] | 0.09 | 0.05 | 0.02 | 0.00 | 0.00 | |
| 2–3 | Average FDMS [°] | 0.14 | 0.18 | 2.52 | 3.09 | 7.09 |
| Average MI [°] | 0.47 | 0.63 | 2.27 | 3.72 | 7.66 | |
| SRA FDMS [°] | 0.02 | 0.05 | 0.03 | 0.03 | 0.05 | |
| SRA MI [°] | 0.08 | 0.02 | 0.02 | 0.01 | 0.01 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goering, M.; Luhmann, T. Development of a Procedure for Torsion Measurement Using a Fan-Shaped Distance Meter System. Sensors 2023, 23, 8603. https://doi.org/10.3390/s23208603
Goering M, Luhmann T. Development of a Procedure for Torsion Measurement Using a Fan-Shaped Distance Meter System. Sensors. 2023; 23(20):8603. https://doi.org/10.3390/s23208603
Chicago/Turabian StyleGoering, Martina, and Thomas Luhmann. 2023. "Development of a Procedure for Torsion Measurement Using a Fan-Shaped Distance Meter System" Sensors 23, no. 20: 8603. https://doi.org/10.3390/s23208603
APA StyleGoering, M., & Luhmann, T. (2023). Development of a Procedure for Torsion Measurement Using a Fan-Shaped Distance Meter System. Sensors, 23(20), 8603. https://doi.org/10.3390/s23208603