
3D Gas Sensing with Multiple Nano Aerial Vehicles: Interference Analysis, Algorithms and Experimental Validation †


Abstract
:1. Introduction
1.1. Gas Distribution Mapping and Source Localization
1.2. Multi-Robot Systems for Gas Sensing
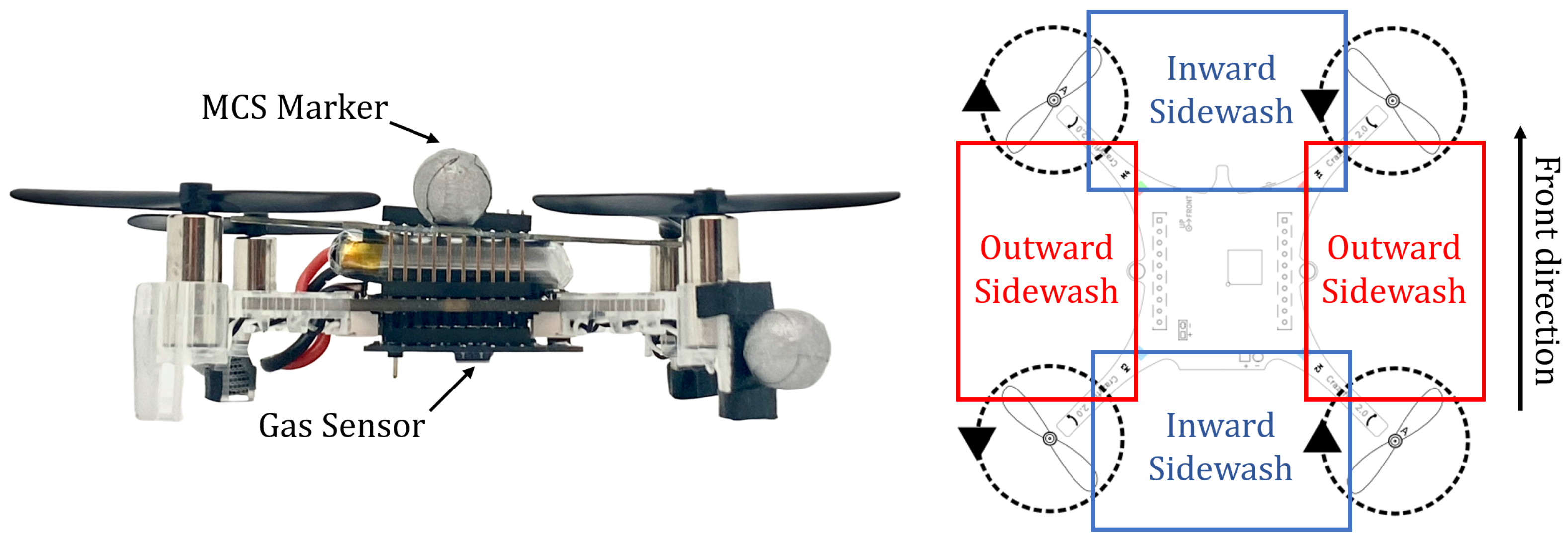
1.3. Robotic Gas Sensing and Propeller Interference
1.4. Paper Contribution
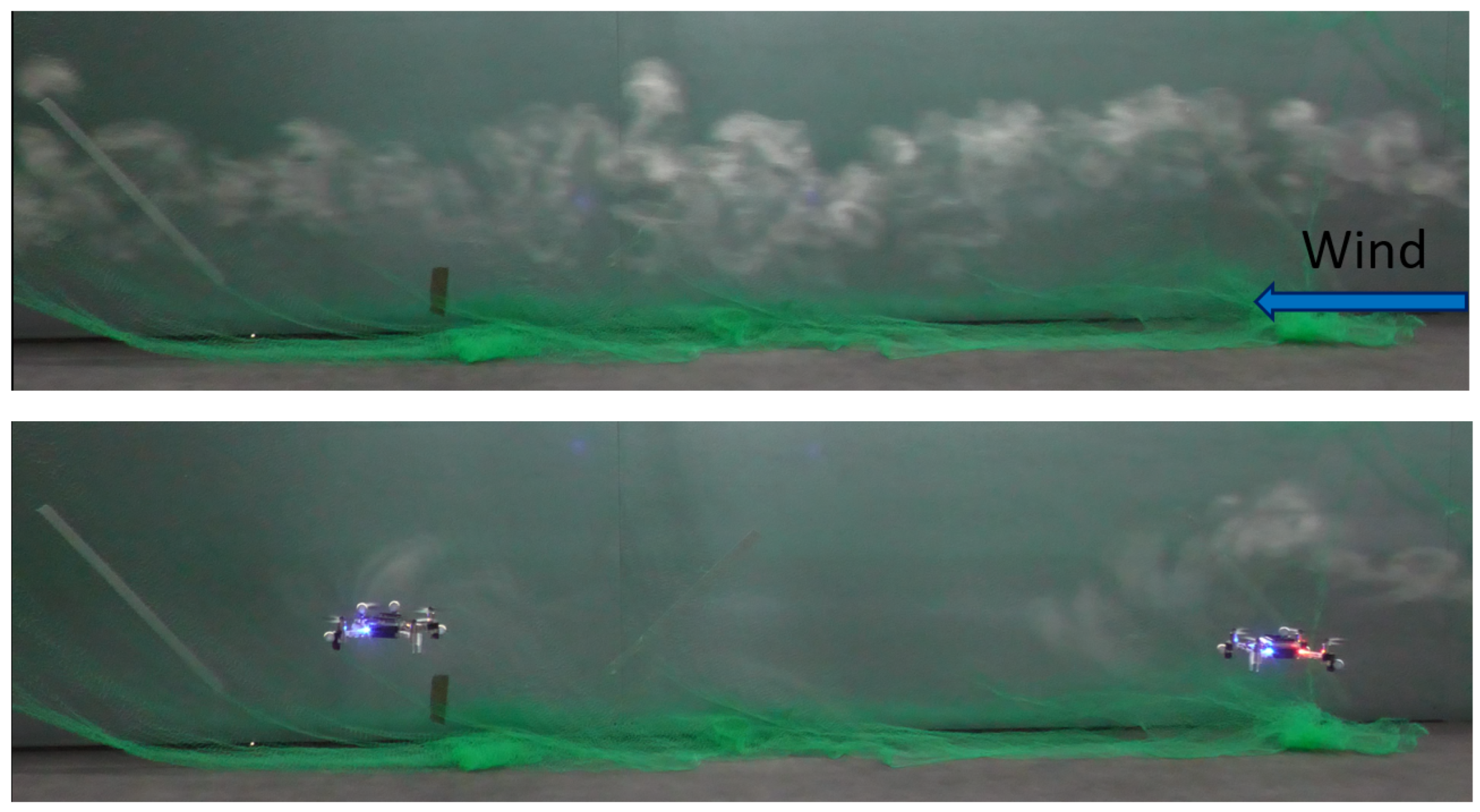
- A qualitative analysis of the interference that a drone has on a gas plume and on a fellow robot, by means of visualizations using a smoke machine;
- A quantitative analysis of the interference, by means of static hovering and plume traversing experiments;
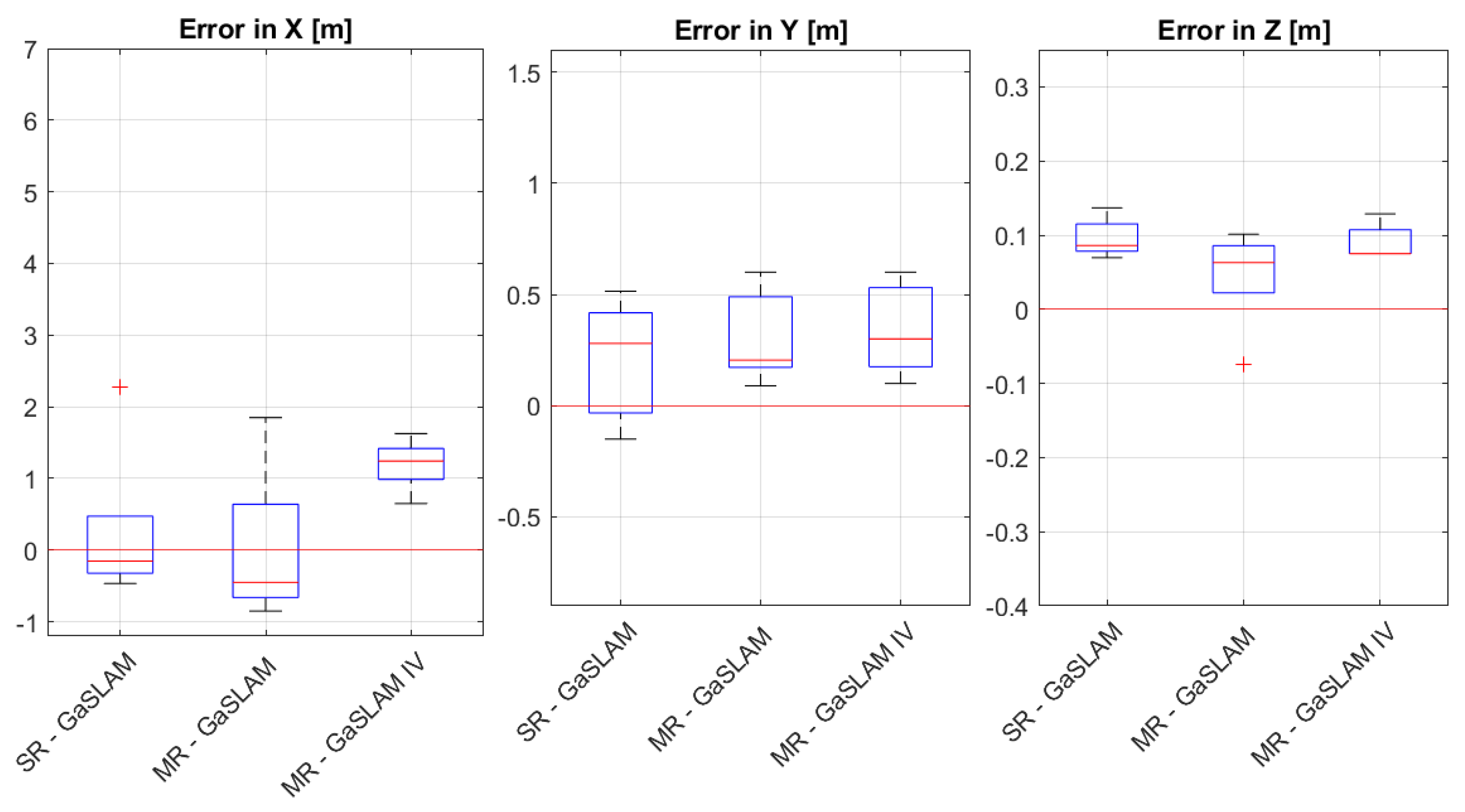
- The deployment of some of the most interesting methods presented in [39] on an MRS flying inside a wind tunnel: namely, the Individualist strategy, the Clustering + Replan strategy and the GaSLAM strategy;
- A strategy aimed at reducing drone-on-drone interference, by means of the inclusion of an off-limits interference volume around each robot, and the analysis of its impact on MRS algorithms for GDM and GSL;
- The comparison of our approaches to three baselines: multi-robot preplanned trajectory, single-robot model-free navigation with clusters and single-robot model-based navigation.
2. Interference Analysis
2.1. Smoke Machine Interference Analysis
2.2. Experimental Interference Analysis
3. Multi-Robot Gas Sensing Algorithms
3.1. Gas Map Estimation
3.2. Navigation
3.3. Coordination Strategies
3.3.1. Individualist Strategy
3.3.2. Collaborative Strategy with Clustering
3.4. Model-Based Navigation
3.5. Baselines
3.6. Interference Volume and Collision Avoidance
4. Performance Evaluation
4.1. Experimental Platform
4.2. Experimental Testbed
4.3. Ground Truth and Sensor Calibration
4.4. Evaluation Metrics
5. Results
6. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GDM | Gas Distribution Mapping |
| GSL | Gas Source Localization |
| MRS | Multi-Robot System |
| NAV | Nano Aerial Vehicle |
| IPP | Informative Path Planning |
| STE | Source-Term Estimation |
| UAV | Unmanned Aerial Vehicles |
| CF | Crazyflie |
| KLD | Kullback–Leibler Divergence |
| IV | Interference Volume |
| CA | Collision Avoidance |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle | r [m] | Initial Phase CF1 | Interference Phase | Percentage Change |
|---|---|---|---|---|
| 0 | 0.5 | 0.88 | 0.64 | ↓ 27.5% |
| 0 | 1 | 0.92 | 0.94 | ↑ 2.0% |
| 45 | 0.5 | 0.85 | 0.87 | ↑ 1.2% |
| 45 | 1 | 0.93 | 0.99 | ↑ 6.1% |
| 90 | 0.25 | 0.79 | 0.09 | ↓ 88.1% |
| 90 | 0.5 | 0.84 | 0.11 | ↓ 86.5% |
| 90 | 1 | 0.61 | 0.46 | ↓ 23.9% |
| 135 | 0.25 | 0.89 | 0.58 | ↓ 35.7% |
| 135 | 0.5 | 0.79 | 1 | ↑ 26.3% |
| 135 | 1 | 0.92 | 1 | ↑ 8.4% |
| 180 | 0.25 | 0.78 | 0.54 | ↓ 30.0% |
| 180 | 0.5 | 0.79 | 0.80 | ↑ 1.6% |
| 180 | 1 | 0.76 | 0.70 | ↓ 8.0% |
| Angle | r [m] | Initial Phase CF1 | Interference Phase | Percentage Change |
|---|---|---|---|---|
| 0 | 0.5 | 0.91 | 0.88 | ↓ 2.7% |
| 0 | 1 | 0.84 | 0.95 | ↑ 13.7% |
| 45 | 0.5 | 0.92 | 0.89 | ↓ 2.9% |
| 45 | 1 | 0.91 | 0.76 | ↓ 16.3% |
| 90 | 0.25 | 0.78 | 0.10 | ↓ 87.6% |
| 90 | 0.5 | 0.82 | 0.09 | ↓ 88.9% |
| 90 | 1 | 0.84 | 0.50 | ↓ 40.2% |
| 135 | 0.5 | 0.94 | 0.44 | ↓ 53.2% |
| 135 | 1 | 0.91 | 0.62 | ↓ 31.9% |
| 180 | 0.5 | 0.94 | 0.12 | ↓ 86.4% |
| 180 | 1 | 0.86 | 0.20 | ↓ 76.4% |
References
- Popović, M.; Vidal-Calleja, T.; Hitz, G.; Chung, J.J.; Sa, I.; Siegwart, R.; Nieto, J. An informative path planning framework for UAV-based terrain monitoring. Auton. Robots 2020, 44, 889–911. [Google Scholar] [CrossRef]
- Quattrini Li, A.; Rekleitis, I.; Manjanna, S.; Kakodkar, N.; Hansen, J.; Dudek, G.; Bobadilla, L.; Anderson, J.; Smith, R.N. Data correlation and comparison from multiple sensors over a coral reef with a team of heterogeneous aquatic robots. In Proceedings of the International Symposium on Experimental Robotics, Tokyo, Japan, 3–6 October 2016; pp. 717–728. [Google Scholar]
- Francis, A.; Li, S.; Griffiths, C.; Sienz, J. Gas source localization and mapping with mobile robots: A review. J. Field Robot. 2022, 39, 1341–1373. [Google Scholar] [CrossRef]
- Ercolani, C.; Tang, L.; Humne, A.A.; Martinoli, A. Clustering and Informative Path Planning for 3D Gas Distribution Mapping: Algorithms and Performance Evaluation. IEEE Robot. Autom. Lett. 2022, 7, 5310–5317. [Google Scholar] [CrossRef]
- Burgués, J.; Hernández, V.; Lilienthal, A.J.; Marco, S. Smelling Nano Aerial Vehicle for Gas Source Localization and Mapping. Sensors 2019, 19, 478. [Google Scholar] [CrossRef] [PubMed]
- Duisterhof, B.P.; Li, S.; Burgués, J.; Reddi, V.J.; de Croon, G.C. Sniffy bug: A fully autonomous swarm of gas-seeking nano quadcopters in cluttered environments. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems, Prague, Czech Republic, 27 September–1 October 2021; pp. 9099–9106. [Google Scholar]
- Lilienthal, A.J.; Reggente, M.; Trincavelli, M.; Blanco, J.L.; Gonzalez, J. A statistical approach to gas distribution modelling with mobile robots-the kernel DM+V algorithm. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 570–576. [Google Scholar]
- Reggente, M.; Lilienthal, A.J. The 3D-kernel DM+V/W algorithm: Using wind information in three dimensional gas distribution modelling with a mobile robot. In Proceedings of the IEEE International Conference on Sensors, Big Island, HI, USA, 1–4 November 2010; pp. 999–1004. [Google Scholar]
- Neumann, P.P.; Bennetts, M.S.I.V.H.; Bartholmai, I.M. Adaptive gas source localization strategies and gas distribution mapping using a gas-sensitive micro-drone. Technology (BMWi) 2012, 4, 6. [Google Scholar]
- Neumann, P.P.; Asadi, S.; Lilienthal, A.J.; Bartholmai, M.; Schiller, J.H. Autonomous gas-sensitive microdrone: Wind vector estimation and gas distribution mapping. IEEE Robot. Autom. Mag. 2012, 19, 50–61. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Autonom. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Evans, W.C.; Dias, D.; Roelofsen, S.; Martinoli, A. Environmental field estimation with hybrid-mobility sensor networks. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 5301–5308. [Google Scholar]
- Rhodes, C.; Liu, C.; Chen, W.H. Informative Path Planning for Gas Distribution Mapping in Cluttered Environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 25–29 October 2020; pp. 6726–6732. [Google Scholar]
- Hutchinson, M.; Liu, C.; Chen, W.H. Source term estimation of a hazardous airborne release using an unmanned aerial vehicle. J. Field Robot. 2019, 36, 797–817. [Google Scholar] [CrossRef]
- Vergassola, M.; Villermaux, E.; Shraiman, B.I. ‘Infotaxis’ as a strategy for searching without gradients. Nature 2007, 445, 406–409. [Google Scholar] [CrossRef]
- Hutchinson, M.; Oh, H.; Chen, W.H. A review of source term estimation methods for atmospheric dispersion events using static or mobile sensors. Inf. Fusion 2017, 36, 130–148. [Google Scholar] [CrossRef]
- Ercolani, C.; Tang, L.; Martinoli, A. GaSLAM: An Algorithm for Simultaneous Gas Source Localization and Gas Distribution Mapping in 3D. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Kyoto, Japan, 23–27 October 2022; pp. 333–340. [Google Scholar]
- Rahbar, F.; Marjovi, A.; Martinoli, A. An algorithm for odor source localization based on source term estimation. In Proceedings of the IEEE International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019; pp. 973–979. [Google Scholar]
- Almadhoun, R.; Taha, T.; Seneviratne, L.; Zweiri, Y. A survey on multi-robot coverage path planning for model reconstruction and mapping. SN Appl. Sci. 2019, 1, 847. [Google Scholar] [CrossRef]
- Cho, D.H.; Ha, J.S.; Lee, S.; Moon, S.; Choi, H.L. Informative path planning and mapping with multiple uavs in wind fields. In Distributed Autonomous Robotic Systems; Springer: Berlin, Germany, 2018; pp. 269–283. [Google Scholar]
- Manjanna, S.; Hsieh, M.A.; Dudek, G. Scalable multirobot planning for informed spatial sampling. Auton. Robots 2022, 46, 817–829. [Google Scholar] [CrossRef]
- Atanasov, N.; Le Ny, J.; Daniilidis, K.; Pappas, G.J. Decentralized active information acquisition: Theory and application to multi-robot SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 25–30 May 2015; pp. 4775–4782. [Google Scholar]
- Corah, M.; O’Meadhra, C.; Goel, K.; Michael, N. Communication-efficient planning and mapping for multi-robot exploration in large environments. IEEE Robot. Autom. Lett. 2019, 4, 1715–1721. [Google Scholar] [CrossRef]
- Wiedemann, T.; Shutin, D.; Lilienthal, A.J. Model-based gas source localization strategy for a cooperative multi-robot system—A probabilistic approach and experimental validation incorporating physical knowledge and model uncertainties. Robot. Auton. Syst. 2019, 118, 66–79. [Google Scholar] [CrossRef]
- He, X.; Steiner, J.A.; Bourne, J.R.; Leang, K.K. Gaussian-based kernel for multi-agent aerial chemical-plume mapping. In Proceedings of the Dynamic Systems and Control Conference. American Society of Mechanical Engineers, Park City, UT, USA, 8–11 October 2019; Volume 59162, p. V003T21A004. [Google Scholar]
- Zhu, P.; Ferrari, S.; Morelli, J.; Linares, R.; Doerr, B. Scalable gas sensing, mapping, and path planning via decentralized Hilbert maps. Sensors 2019, 19, 1524. [Google Scholar] [CrossRef] [PubMed]
- Rahbar, F.; Martinoli, A. A Distributed Source Term Estimation Algorithm for Multi-Robot Systems. In Proceedings of the IEEE International Conference on Robotics and Automation, Paris, France, 31 May–31 August 2020; pp. 5604–5610. [Google Scholar]
- Soares, J.M.; Aguiar, A.P.; Pascoal, A.M.; Martinoli, A. A distributed formation-based odor source localization algorithm-design, implementation, and wind tunnel evaluation. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 25–30 May 2015; pp. 1830–1836. [Google Scholar]
- Murlis, J.; Elkinton, J.S.; Carde, R.T. Odor plumes and how insects use them. Ann. Rev. Entomol. 1992, 37, 505–532. [Google Scholar] [CrossRef]
- Li, C.S.; Yang, Z.H.; Cui, G.Q.; Jin, B. Odor Source Localization Research of Mobile Robots in Indoor Environments. Appl. Mech. Mater. 2014, 441, 796–800. [Google Scholar] [CrossRef]
- Neumann, P.P.; Hernandez Bennetts, V.; Lilienthal, A.J.; Bartholmai, M.; Schiller, J.H. Gas source localization with a micro-drone using bio-inspired and particle filter-based algorithms. Adv. Robot. 2013, 27, 725–738. [Google Scholar] [CrossRef]
- Shigaki, S.; Fikri, M.; Kurabayashi, D. Design and Experimental Evaluation of an Odor Sensing Method for a Pocket-Sized Quadcopter. Sensors 2018, 18, 3720. [Google Scholar] [CrossRef]
- Ercolani, C.; Martinoli, A. 3D Odor Source Localization Using a Micro Aerial Vehicle: System Design and Performance Evaluation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 25–29 October 2020; pp. 6194–6200. [Google Scholar]
- Yeo, D.; Shrestha, E.; Paley, D.A.; Atkins, E.M. An empirical model of rotorcrafy UAV downwash for disturbance localization and avoidance. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Dallas, TX, USA, 22–26 June 2015; p. 1685. [Google Scholar]
- Lee, S.; Chae, S.; Woo, S.Y.; Jang, J.; Kim, J. Effects of Rotor-Rotor Interaction on the Wake Structure and Thrust Generation of a Quadrotor Unmanned Aerial Vehicle. IEEE Access 2021, 9, 85995–86016. [Google Scholar] [CrossRef]
- Luo, B.; Meng, Q.H.; Wang, J.Y.; Zeng, M. A flying odor compass to autonomously locate the gas source. IEEE Trans. Instrum. Meas. 2017, 67, 137–149. [Google Scholar] [CrossRef]
- Preiss, J.A.; Hönig, W.; Ayanian, N.; Sukhatme, G.S. Downwash-aware trajectory planning for large quadrotor teams. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 250–257. [Google Scholar]
- Jing, T.; Wang, J.Y.; Meng, Q.H. An aero-olfactory-effect elimination algorithm for rotor UAV based gas distribution mapping. In Proceedings of the 2020 39th Chinese Control Conference, Shenyang, China, 27–29 July 2020; pp. 3822–3827. [Google Scholar]
- Ercolani, C.; Deshmukh, S.M.; Peeters, T.L.; Martinoli, A. Multi-Robot 3D Gas Distribution Mapping: Coordination, Information Sharing and Environmental Knowledge. In Proceedings of the IEEE International Conference on Robotics and Automation, London, UK, 29 May–2 June 2023; pp. 11418–11424. [Google Scholar]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Rahbar, F.; Marjovi, A.; Martinoli, A. Design and performance evaluation of an algorithm based on source term estimation for odor source localization. Sensors 2019, 19, 656. [Google Scholar] [CrossRef] [PubMed]
- Arya, S.P. Air Pollution Meteorology and Dispersion; Oxford University Press: New York, NY, USA, 1999; Volume 310. [Google Scholar]
- Preiss, J.A.; Honig, W.; Sukhatme, G.S.; Ayanian, N. Crazyswarm: A large nano-quadcopter swarm. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation, Marina Bay Sands, Singapore, 29 May–3 June 2017; pp. 3299–3304. [Google Scholar]
- Liao, P.S.; Chen, T.S.; Chung, P.C. A fast algorithm for multilevel thresholding. J. Inf. Sci. Eng. 2001, 17, 713–727. [Google Scholar]


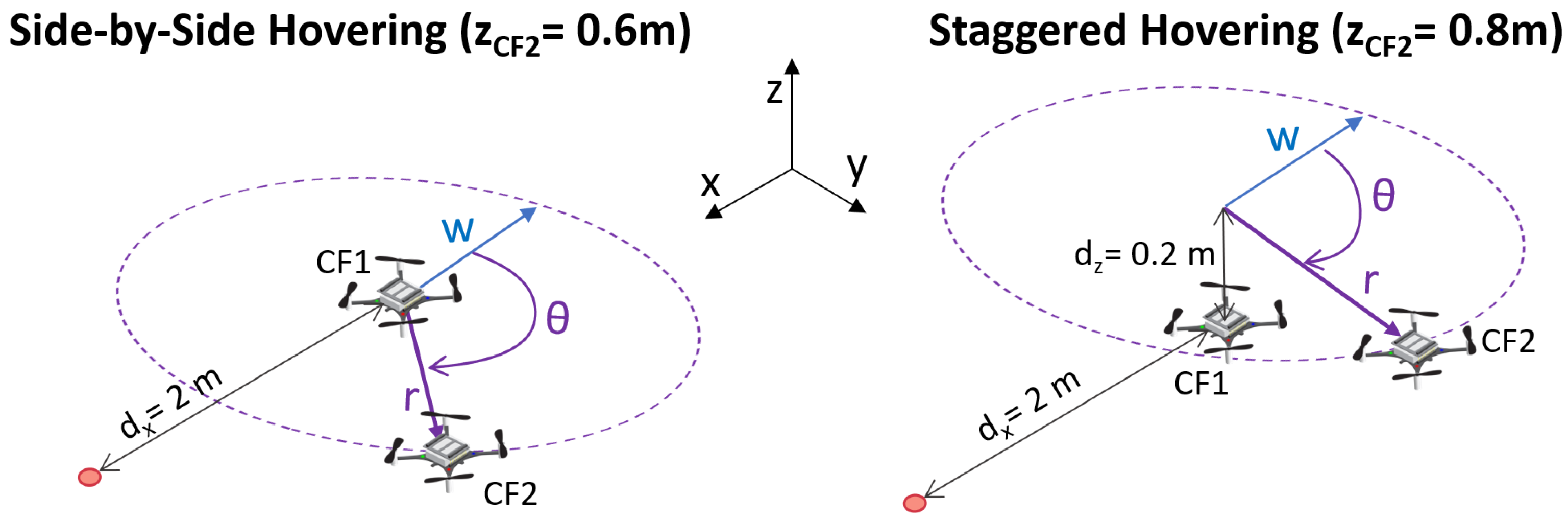



| Configuration | Angle | r [m] | Sensing Percentage Change |
|---|---|---|---|
| Side-by-side | 90 | 0.5 | ↓ 74.9% |
| Staggered | 90 | 0.5 | ↓ 22.2% |
| Side-by-side | 180 | 0.5 | ↓ 30.0% |
| Staggered | 180 | 0.5 | ↓ 75.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ercolani, C.; Jin, W.; Martinoli, A. 3D Gas Sensing with Multiple Nano Aerial Vehicles: Interference Analysis, Algorithms and Experimental Validation. Sensors 2023, 23, 8512. https://doi.org/10.3390/s23208512
Ercolani C, Jin W, Martinoli A. 3D Gas Sensing with Multiple Nano Aerial Vehicles: Interference Analysis, Algorithms and Experimental Validation. Sensors. 2023; 23(20):8512. https://doi.org/10.3390/s23208512
Chicago/Turabian StyleErcolani, Chiara, Wanting Jin, and Alcherio Martinoli. 2023. "3D Gas Sensing with Multiple Nano Aerial Vehicles: Interference Analysis, Algorithms and Experimental Validation" Sensors 23, no. 20: 8512. https://doi.org/10.3390/s23208512
APA StyleErcolani, C., Jin, W., & Martinoli, A. (2023). 3D Gas Sensing with Multiple Nano Aerial Vehicles: Interference Analysis, Algorithms and Experimental Validation. Sensors, 23(20), 8512. https://doi.org/10.3390/s23208512