Driving Signal and Geometry Analysis of a Magnetoelastic Bending Mode Pressductor Type Sensor

 , ,
, ,  , , , ,
, , , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
3. Material Characteristics Determination
3.1. Estimation of the Young’s Modulus
3.2. Estimation of the Electrical Resistivity
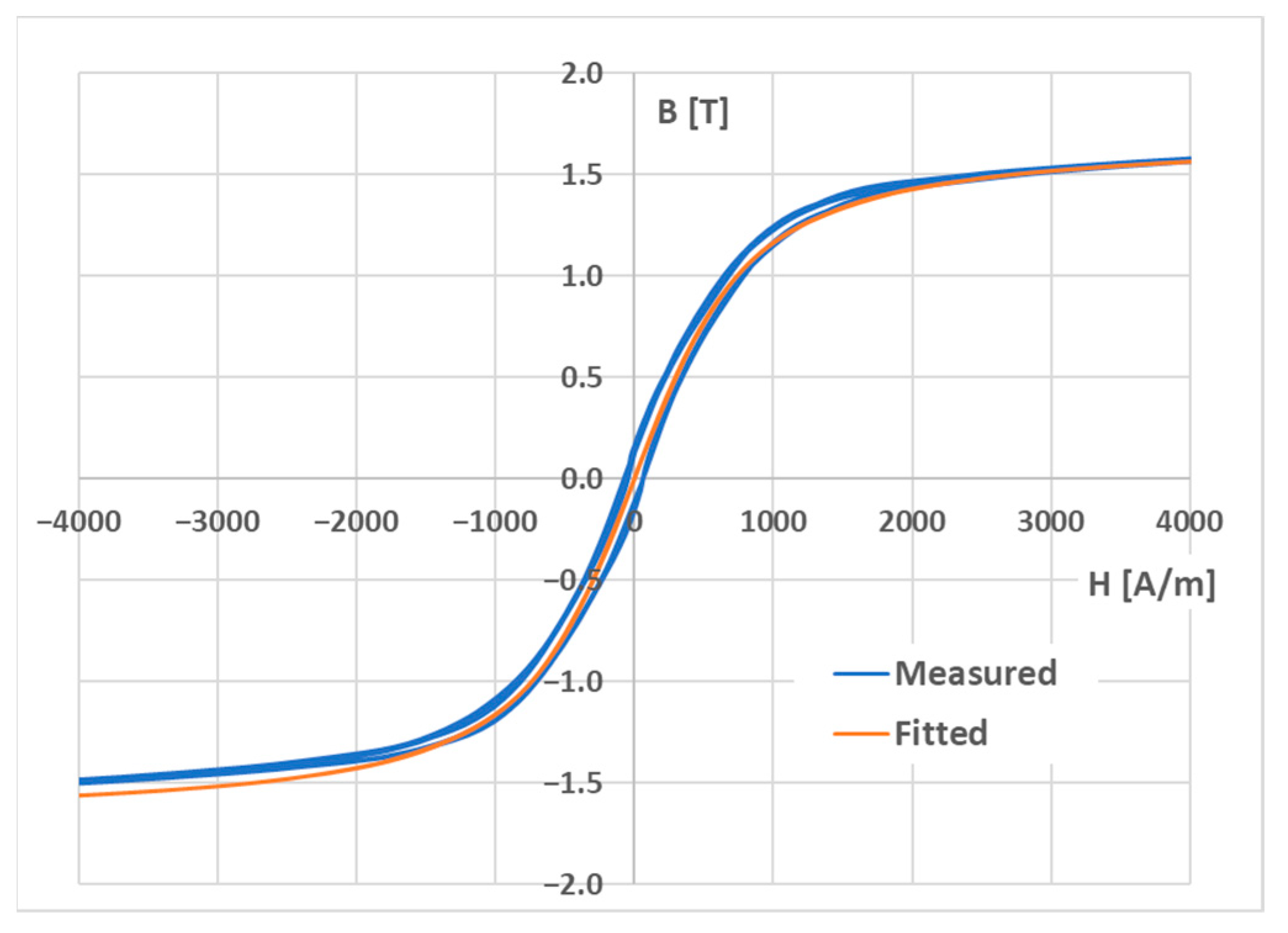
3.3. Estimation of the Anhysteretic Magnetization
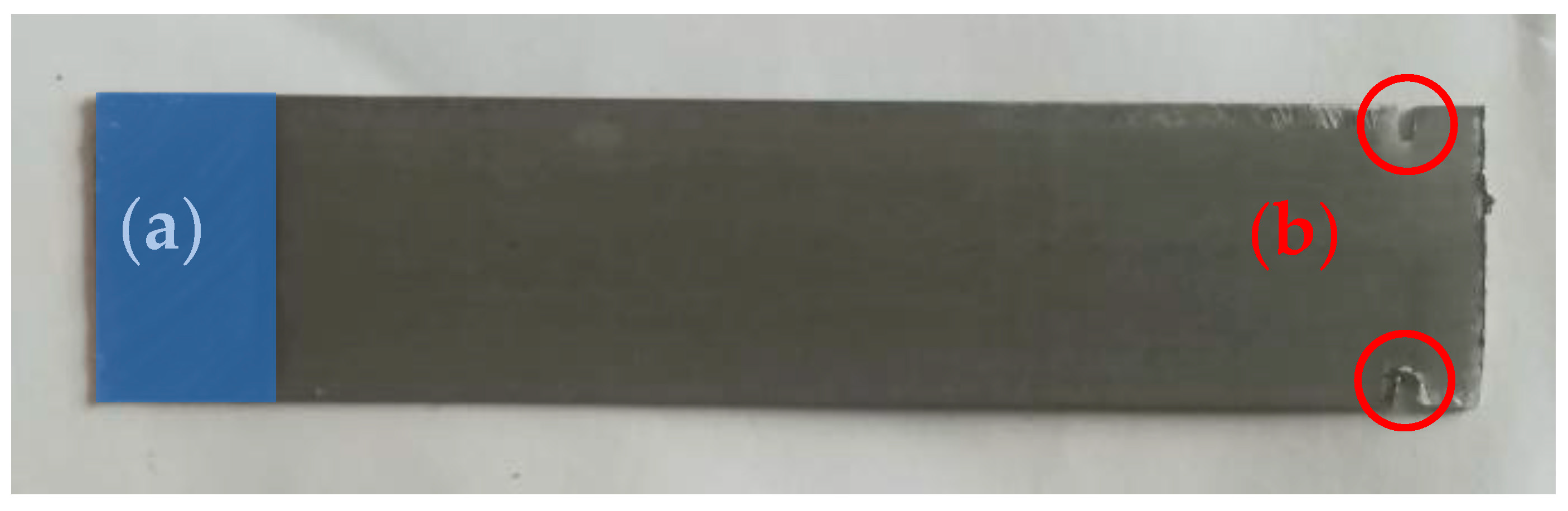
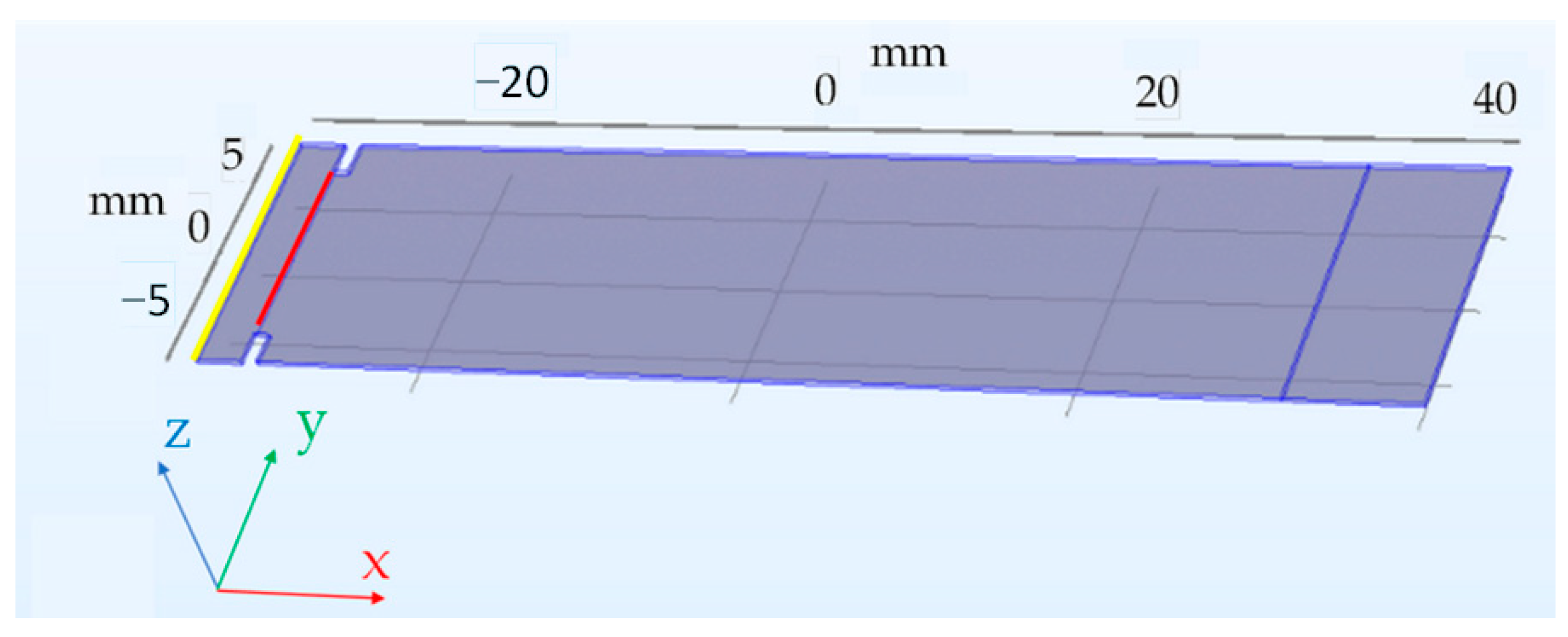
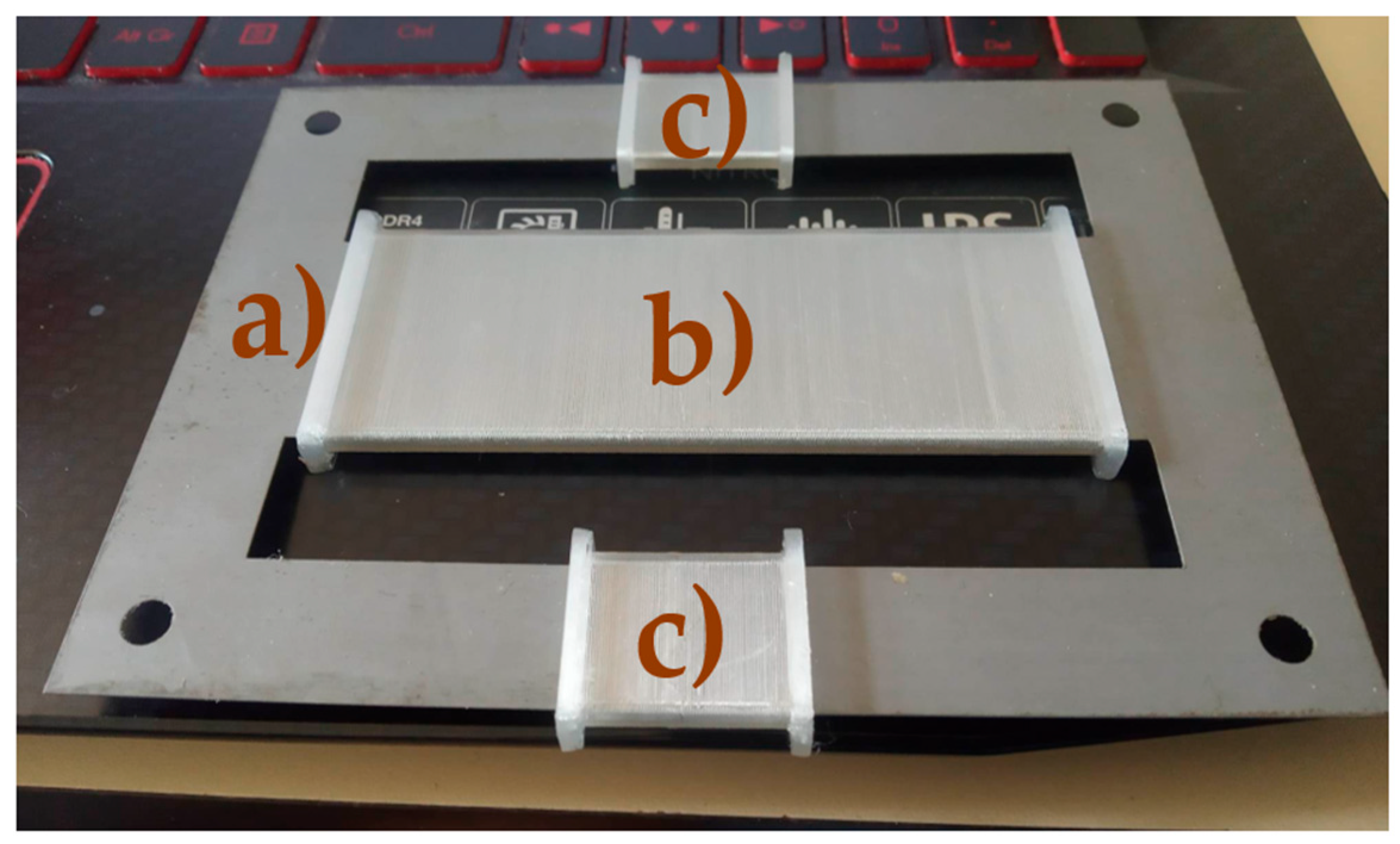
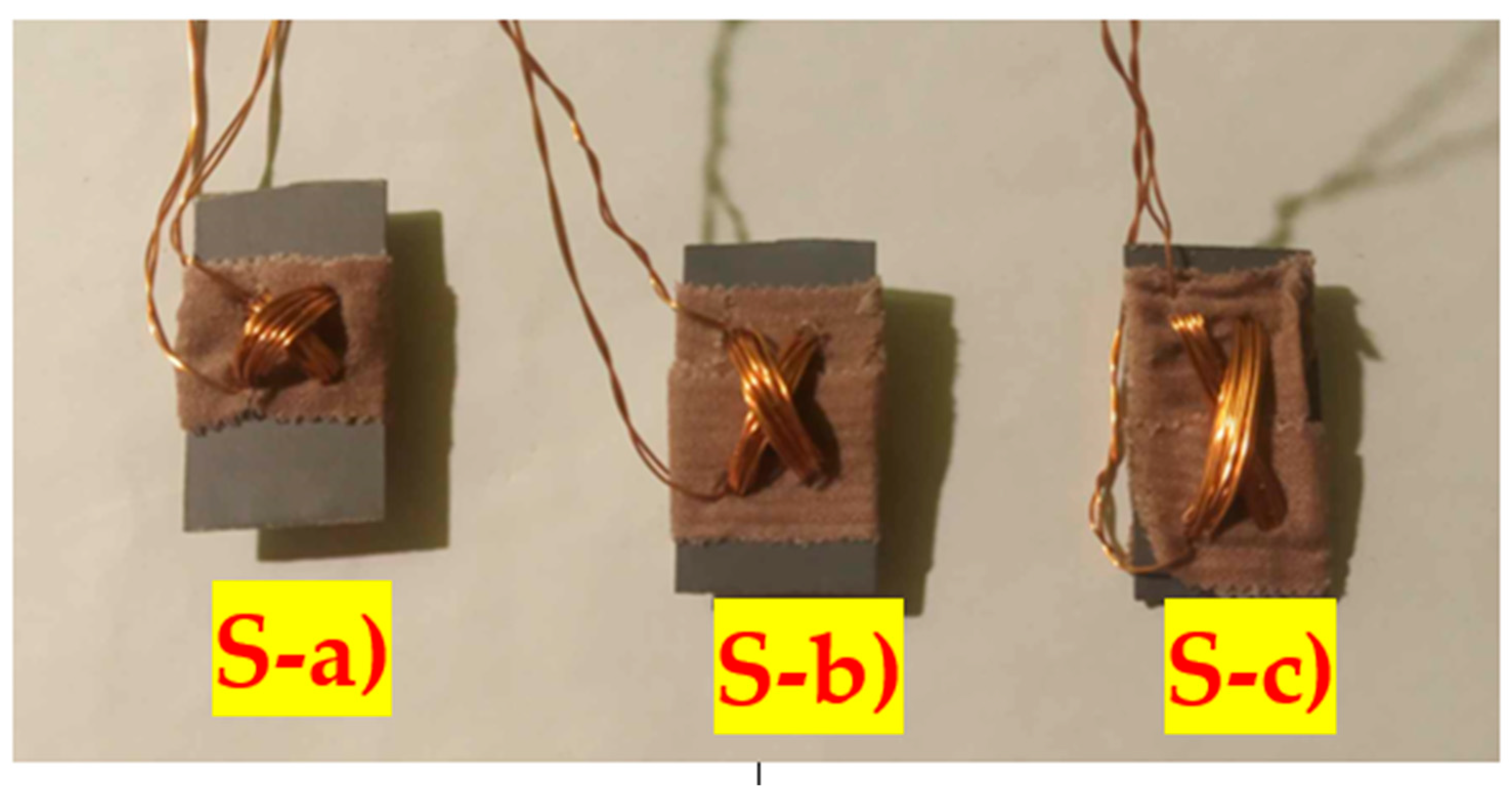
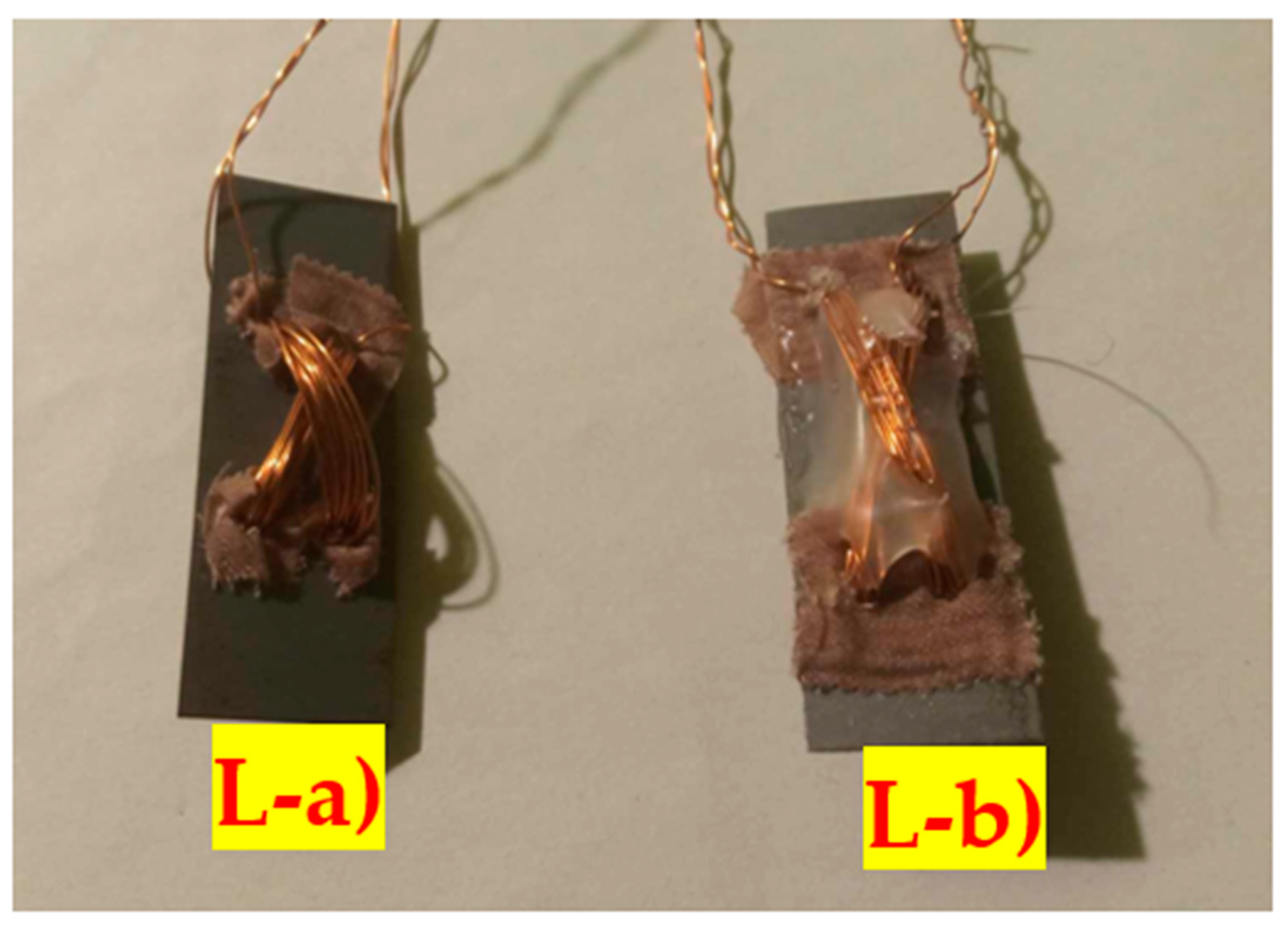
4. Sensor Samples
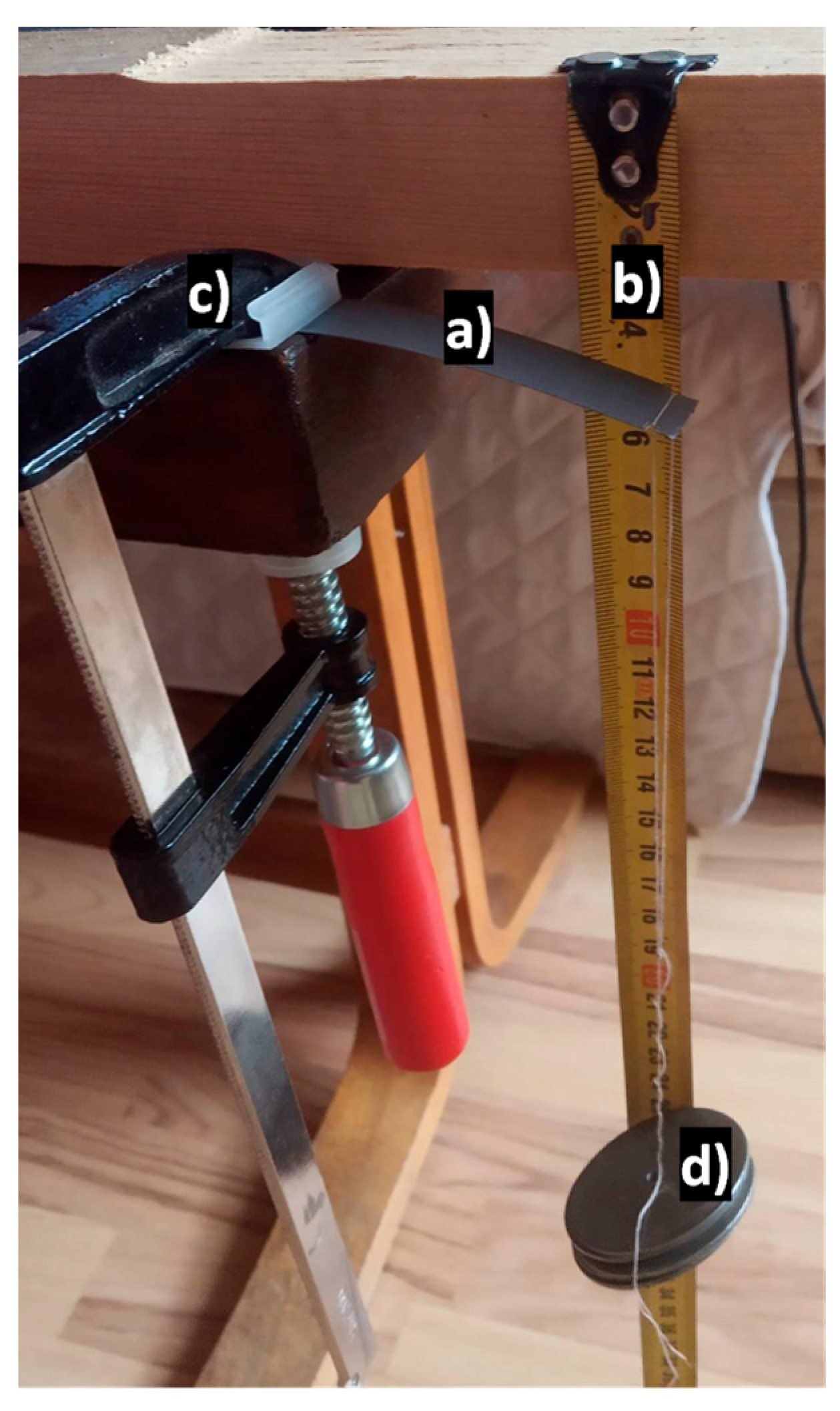
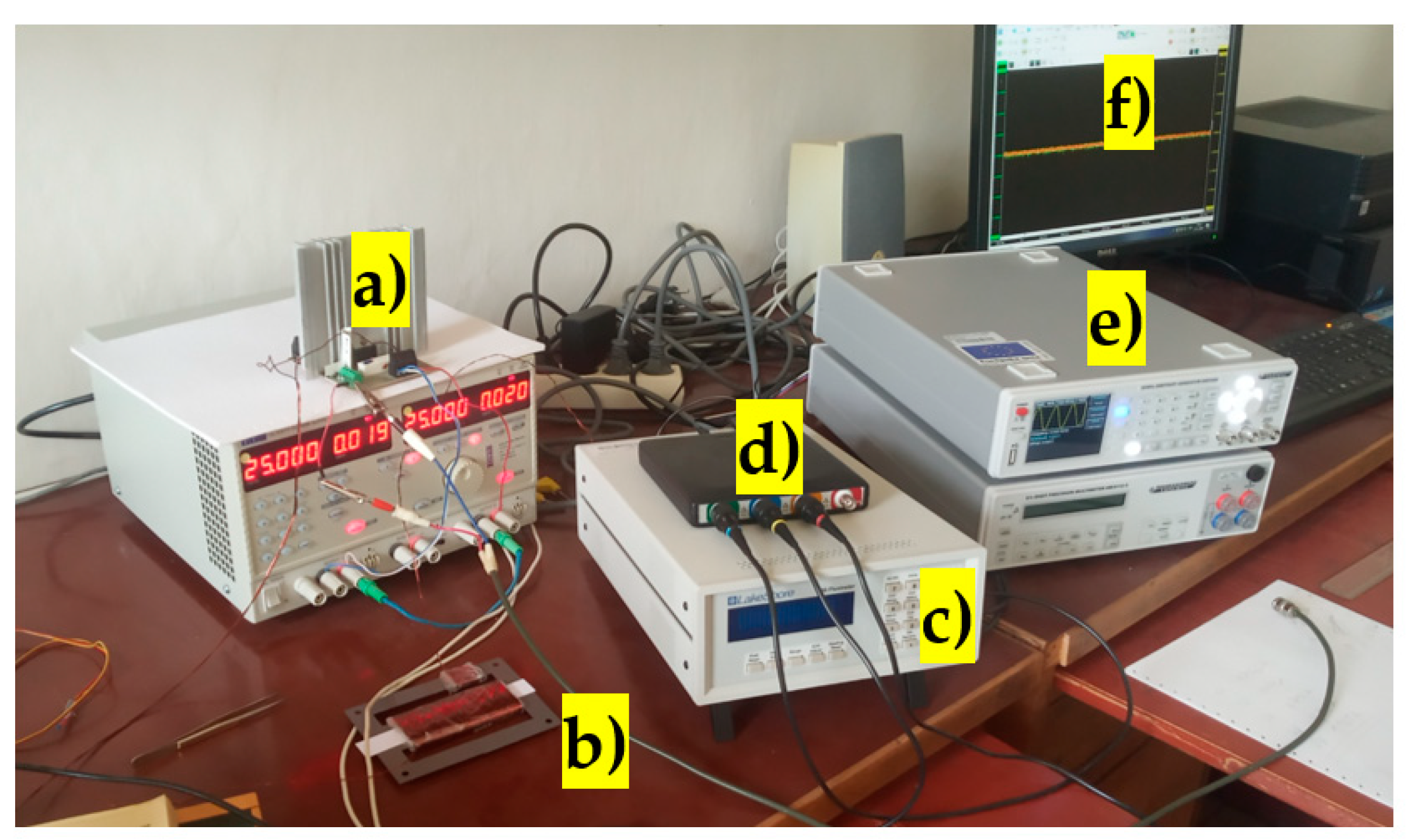
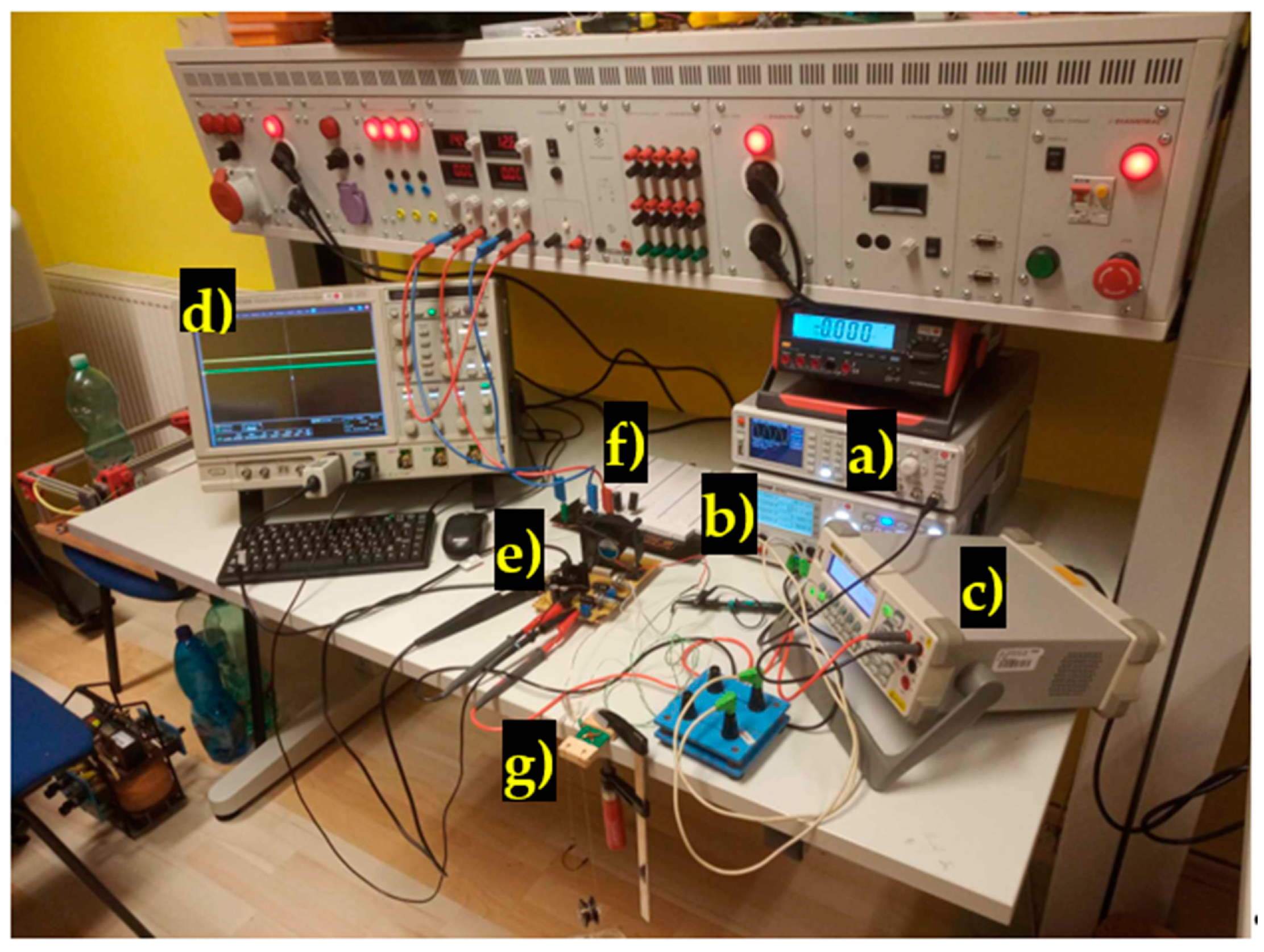
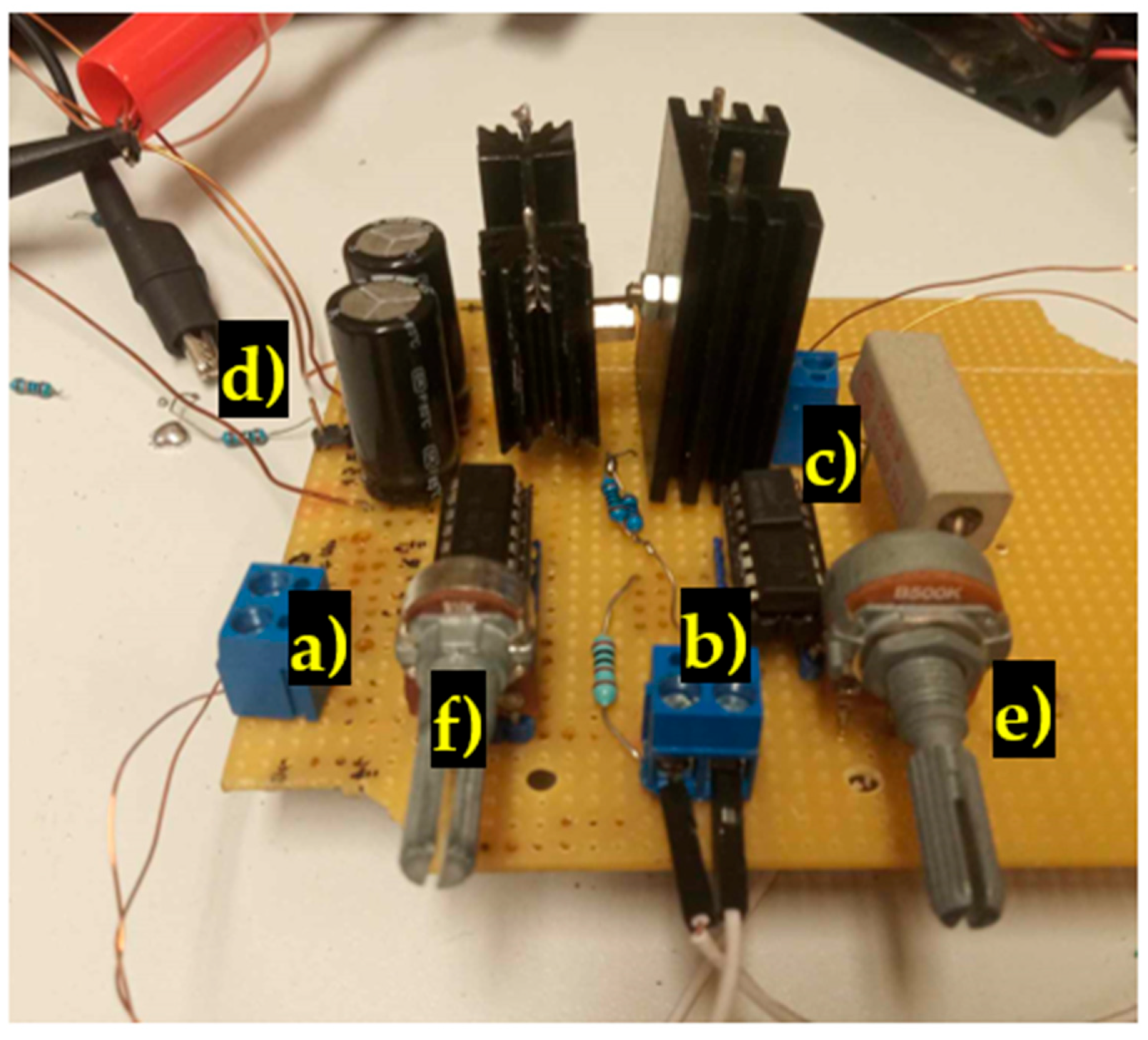
5. Experimental Setup
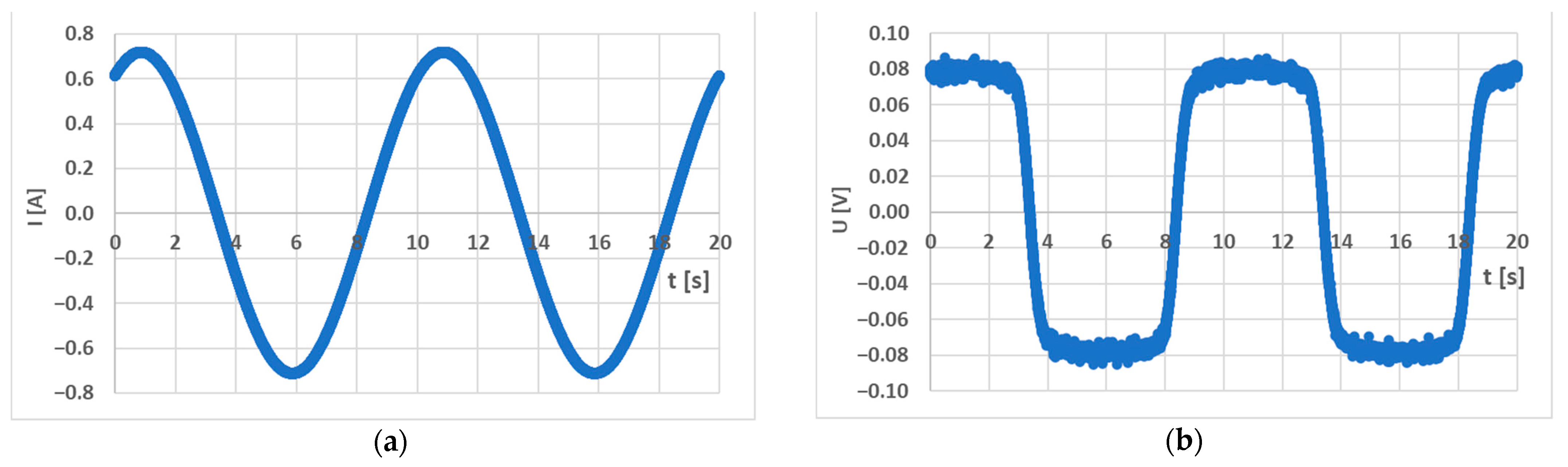
6. Experimental Results
6.1. The Effect of Different Placement of Holes on the Static Response (S—Sensors)
6.2. The Effect of Different Placements of Holes on the Static Response (L—Sensors)
6.3. The Effect of Different Placement of Holes on the (L-b) Sheet
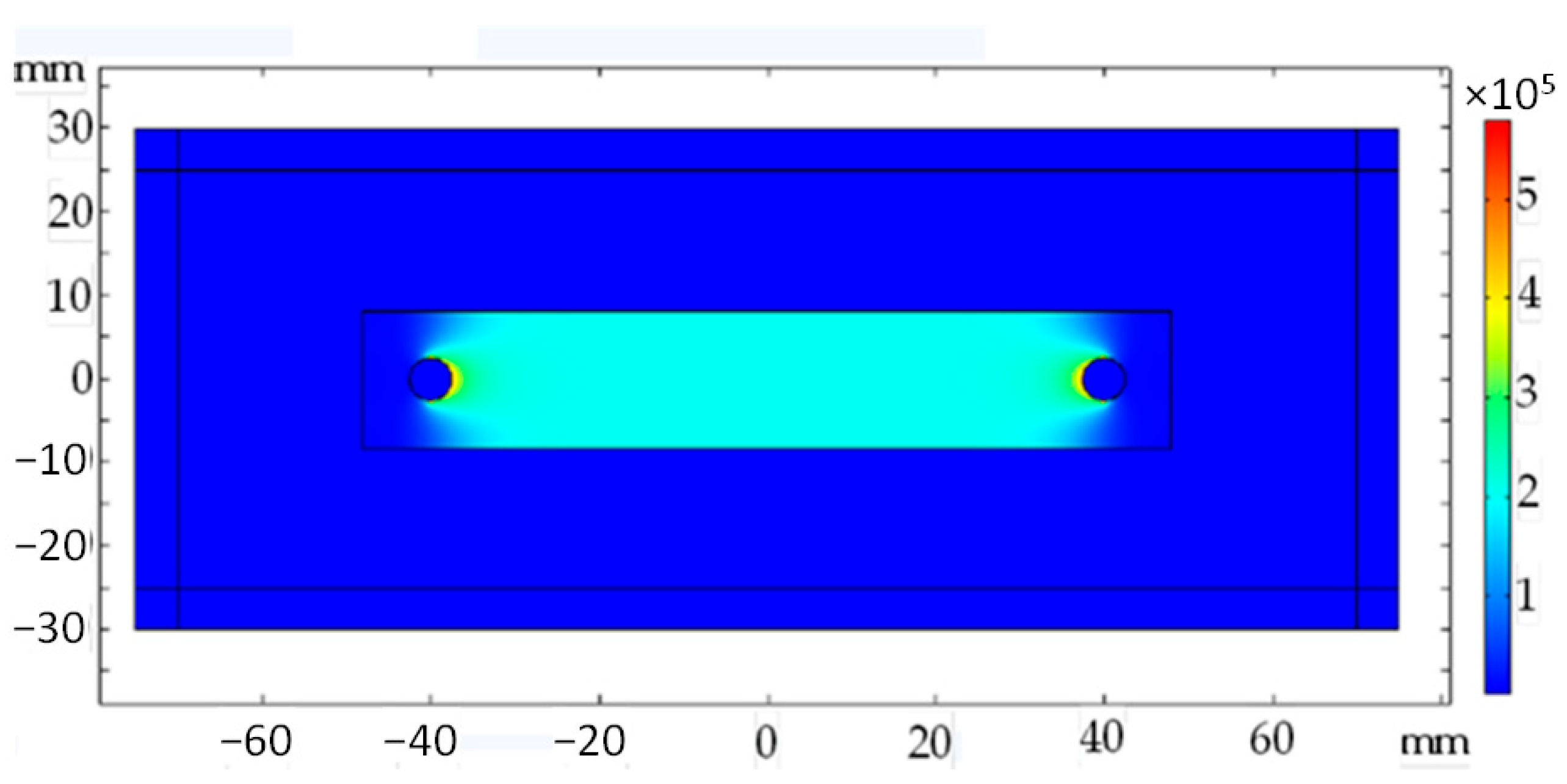
7. Simulation Results
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dahle, O. The pressductor and the torductor—Two heavy-duty transducers based on magnetic stress sensitivity. IEEE Trans. Commun. Electron. 1964, 83, 752–758. [Google Scholar] [CrossRef]
- Jarosevic, A. Magnetoelastic Method of Stress Measurement in Steel. In Smart Structures; Springer: Amsterdam, The Netherlands, 1999; pp. 107–114. [Google Scholar] [CrossRef]
- Chen, J.; Wang, D.; Cheng, S.; Wang, Y.; Zhu, Y.; Liu, Q. Modeling of Temperature Effects on Magnetic Property of Nonoriented Silicon Steel Lamination. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Grimes, C.; Mungle, C.; Zeng, K.; Jain, M.; Dreschel, W.; Paulose, M.; Ong, K. Wireless Magnetoelastic Resonance Sensors: A Critical Review. Sensors 2002, 2, 294–313. [Google Scholar] [CrossRef]
- Kouzoudis, D.; Grimes, C.A. The frequency response of magnetoelastic sensors to stress and atmospheric pressure. Smart Mater. Struct. 2000, 9, 885–889. [Google Scholar] [CrossRef]
- Ong, K.G.; Mungle, C.S.; Grimes, C.A. Control of a magnetoelastic sensor temperature response by magnetic field tuning. IEEE Trans. Magn. 2003, 39, 3319–3321. [Google Scholar] [CrossRef]
- Grimes, C.A.; Ong, K.G.; Loiselle, K.; Stoyanov, P.G.; Kouzoudis, D.; Liu, Y.; Tong, C.; Tefiku, F. Magnetoelastic sensors for remote query environmental monitoring. Smart Mater. Struct. 1999, 8, 639–646. [Google Scholar] [CrossRef]
- Saiz, P.G.; Gutierrez, J.; Arriortua, M.I.; Lopes, A.C. Theoretical and Experimental Analysis of Novel Rhombus Shaped Magnetoelastic Sensors with Enhanced Mass Sensitivity. IEEE Sens. J. 2020, 20, 13332–13340. [Google Scholar] [CrossRef]
- Grimes, C.A.; Roy, S.C.; Rani, S.; Cai, Q. Theory, Instrumentation and Applications of Magnetoelastic Resonance Sensors: A Review. Sensors 2011, 11, 2809–2844. [Google Scholar] [CrossRef]
- Nlebedim, I.C.; Jiles, D.C. Suitability of cation substituted cobalt ferrite materials for magnetoelastic sensor applications. Smart Mater. Struct. 2015, 24, 025006. [Google Scholar] [CrossRef]
- Szewczyk, R. Stress-Induced Anisotropy and Stress Dependence of Saturation Magnetostriction in the Jiles-Atherton-Sablik Model of the Magnetoelastic Villari Effect. Arch. Metall. Mater. 2016, 61, 607–612. [Google Scholar] [CrossRef]
- Ferenc, J.; Kowalczyk, M.; Cieslak, G.; Kulik, T. Magnetostrictive Iron-Based Bulk Metallic Glasses for Force Sensors. IEEE Trans. Magn. 2014, 50, 1–3. [Google Scholar] [CrossRef]
- Salach, J.; Bieńkowski, A.; Szewczyk, R. The ring-shaped magnetoelastic torque sensors utilizing soft amorphous magnetic materials. J. Magn. Magn. Mater. 2007, 316, e607–e609. [Google Scholar] [CrossRef]
- Jackiewicz, D.; Kachniarz, M.; Rozniatowski, K.; Dworecka, J.; Szewczyk, R.; Salach, J.; Bienkowski, A.; Winiarski, W. Temperature Resistance of Magnetoelastic Characteristics of 13CrMo4-5 Constructional Steel. Acta Phys. Pol. A 2015, 127, 614–616. [Google Scholar] [CrossRef]
- Günther-Hanssen, S. New transducer, a unique concept for weighing. Sens. Rev. 1985, 5, 83–86. [Google Scholar] [CrossRef]
- Nowicki, M. Tensductor—Amorphous Alloy Based Magnetoelastic Tensile Force Sensor. Sensors 2018, 18, 4420. [Google Scholar] [CrossRef] [PubMed]
- Bieńkowski, A.; Szewczyk, R. The possibility of utilizing the high permeability magnetic materials in construction of magnetoelastic stress and force sensors. Sens. Actuators A: Phys. 2004, 113, 270–276. [Google Scholar] [CrossRef]
- Zhang, Q.; Su, Y.; Zhang, L.; Bi, J.; Luo, J. Magnetoelastic Effect-Based Transmissive Stress Detection for Steel Strips: Theory and Experiment. Sensors 2016, 16, 1382. [Google Scholar] [CrossRef] [PubMed]
- Grenda, P.; Kutyła, M.; Nowicki, M.; Charubin, T. Bendductor—Transformer Steel Magnetomechanical Force Sensor. Sensors 2021, 21, 8250. [Google Scholar] [CrossRef]
- Downey, P.R.; Flatau, A.B. Magnetoelastic bending of Galfenol for sensor applications. J. Appl. Phys. 2005, 97, 10R505. [Google Scholar] [CrossRef]
- Zhao, R.; Yuan, Q.; Yan, J.; Lu, Q. The Static and Dynamic Sensitivity of Magnetostrictive Bioinspired Whisker Sensor. J. Nanotechnol. 2018, 2018, 2591080. [Google Scholar] [CrossRef]
- Tapeinos, C.I.; Kamitsou, M.D.; Dassios, K.G.; Kouzoudis, D.; Christogerou, A.; Samourgkanidis, G. Contactless and Vibration-Based Damage Detection in Rectangular Cement Beams Using Magnetoelastic Ribbon Sensors. Sensors 2023, 23, 5453. [Google Scholar] [CrossRef] [PubMed]
- Sultana, R.-G.; Dimogianopoulos, D. Contact-Less Sensing and Fault Detection/Localization in Long Flexible Cantilever Beams via Magnetoelastic Film Integration and AR Model-Based Methodology. In Recent Developments in Model-Based and Data-Driven Methods for Advanced Control and Diagnosis; Springer: Cham, Switzerland, 2022; pp. 177–187. [Google Scholar] [CrossRef]
- Spetzler, B.; Kirchhof, C.; Quandt, E.; McCord, J.; Faupel, F. Magnetic Sensitivity of Bending-Mode Delta-E-Effect Sensors. Phys. Rev. Appl. 2019, 12, 064036. [Google Scholar] [CrossRef]
- Samourgkanidis, G.; Kouzoudis, D. Magnetoelastic Ribbons as Vibration Sensors for Real-Time Health Monitoring of Rotating Metal Beams. Sensors 2021, 21, 8122. [Google Scholar] [CrossRef] [PubMed]
- Pepakayala, V.; Green, S.R.; Gianchandani, Y.B. Passive Wireless Strain Sensors Using Microfabricated Magnetoelastic Beam Elements. J. Microelectromech. Syst. 2014, 23, 1374–1382. [Google Scholar] [CrossRef]
- Mehnen, L.; Kaniusas, E.; Kosel, J.; Téllez-Blanco, J.C.; Pfützner, H.; Meydan, T.; Vázquez, M.; Rohn, M.; Malvicino, C.; Marquardt, B. Magnetostrictive bilayer sensors—A survey. J. Alloys Compd. 2004, 369, 202–204. [Google Scholar] [CrossRef]
- Garshelis, I.J.; Tollens, S.P.L. A magnetoelastic force transducer based on bending a circumferentially magnetized tube. J. Appl. Phys. 2010, 107, 09E719. [Google Scholar] [CrossRef]
- Belyakov, A.S. Magnetoelastic sensors and geophones for vector measurements in geoacoustics. Acoust. Phys. 2005, 51 (Suppl. S1), S43–S53. [Google Scholar] [CrossRef]
- Piotrowski, L.; Augustyniak, B.; Chmielewski, M.; Tomáš, I. The influence of plastic deformation on the magnetoelastic properties of the CSN12021 grade steel. J. Magn. Magn. Mater. 2009, 321, 2331–2335. [Google Scholar] [CrossRef]
- Bali, M.; De Gersem, H.; Muetze, A. Determination of Original Nondegraded and Fully Degraded Magnetic Properties of Material Subjected to Mechanical Cutting. IEEE Trans. Ind. Appl. 2016, 52, 2297–2305. [Google Scholar] [CrossRef]
- Dems, M.; Gmyrek, Z.; Komeza, K. The Influence of Cutting Technology on Magnetic Properties of Non-Oriented Electrical Steel—Review State of the Art. Energies 2023, 16, 4299. [Google Scholar] [CrossRef]
- Ostaszewska-Liżewska, A.; Nowicki, M.; Szewczyk, R.; Malinen, M. A FEM-Based Optimization Method for Driving Frequency of Contactless Magnetoelastic Torque Sensors in Steel Shafts. Materials 2021, 14, 4996. [Google Scholar] [CrossRef]
- Dapino, M.J.; Smith, R.C.; Calkins, F.T.; Flatau, A.B. A Magnetoelastic Model for Villari-Effect Magnetostrictive Sensors; North Carolina State University, Center for Research in Scientific Computation: Raleigh, NC, USA, 2002. [Google Scholar] [CrossRef]
- Zhang, D. Magnetic skin effect in silicon-iron core at power frequency. J. Magn. Magn. Mater. 2000, 221, 414–416. [Google Scholar] [CrossRef]
- Guan, W.; Zhang, D.; Yang, M.; Gao, Y.; Muramatsu, K. Hybrid Laminated Iron Core Models Based on Isotropic and Anisotropic Silicon Steels. In Proceedings of the 2018 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Tianjin, China, 15–18 April 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Kitagawa, W.; Ishihara, Y.; Todaka, T.; Nakasaka, A. Analysis of structural deformation and vibration of a transformer core by using magnetic property of magnetostriction. Electr. Eng. Jpn. 2010, 172, 19–26. [Google Scholar] [CrossRef]
- Luo, B.; Xu, Y.; Xu, G.; Liu, Q.; Xiao, W. Research on Low Frequency Vibration Reduction of Transformers Based on Particle Damping. In Proceedings of the 2022 5th World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Ma’anshan, China, 18–20 November 2022; pp. 224–229. [Google Scholar] [CrossRef]
- Wilson, F.; Lord, A.E. Young’s Modulus Determination Via Simple, Inexpensive Static and Dynamic Measurements. Am. J. Phys. 1973, 41, 653–656. [Google Scholar] [CrossRef]
- Tomcikova, I.; Kovac, D.; Kovacova, I. Stress Field Distribution in Magnetoelastic Pressure Force Sensor. Commun.—Sci. Lett. Univ. Zilina 2010, 12, 16–19. [Google Scholar] [CrossRef]
- Dong, Q.; Liu, H. Deformation behaviors of non-oriented silicon steel plate in hot rolling process. IOP Conf. Ser.: Mater. Sci. Eng. 2019, 635, 012027. [Google Scholar] [CrossRef]
- Molnár, J.; Gans, Š. Estimating the Young’s modulus of electrical steels for simulations of mechanical deformation. Proceeding Sci. Stud. Work. Field Ind. Electr. Eng. 2023, 12, 167–169. [Google Scholar]
- Gans, Š.; Molnár, J.; Kováč, D. Estimation of electrical resistivity of conductive materials of random shapes. Electr. Eng. Electromechanics 2023, 6. in press. [Google Scholar]
- Garzon, A.J.; Sanchez, J.; Andrade, C.; Rebolledo, N.; Menéndez, E.; Fullea, J. Modification of four point method to measure the concrete electrical resistivity in presence of reinforcing bars. Cem. Concr. Compos. 2014, 53, 249–257. [Google Scholar] [CrossRef]
- COMSOL 5.6 Nonlinear Material Library. Available online: https://doc.comsol.com/5.6/doc/com.comsol.help.comsol/comsol_ref_materials.21.67.html (accessed on 5 June 2023).
- Nowicki, M. Anhysteretic Magnetization Measurement Methods for Soft Magnetic Materials. Materials 2018, 11, 2021. [Google Scholar] [CrossRef]
- Silveyra, J.M.; Conde Garrido, J.M. A Physically Based Model for Soft Magnets’ Anhysteretic Curve. JOM 2023, 75, 1810–1823. [Google Scholar] [CrossRef]
- COMSOL 5.6 Nonlinear Magnetostrictive Transducer. Available online: https://www.comsol.com/model/download/1033471/models.acdc.nonlinear_magnetostriction.pdf (accessed on 8 August 2023).
- Fraden, J. Handbook of Modern Sensors: Physics, Design, and Applications, 5th ed.; Springer International Publishing: Cham, Switzerland, 2010; pp. 29–34. ISBN 978-3-319-19303-8. [Google Scholar]


















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gans, Š.; Molnár, J.; Kováč, D.; Kováčová, I.; Fecko, B.; Bereš, M.; Jacko, P.; Dziak, J.; Vince, T. Driving Signal and Geometry Analysis of a Magnetoelastic Bending Mode Pressductor Type Sensor. Sensors 2023, 23, 8393. https://doi.org/10.3390/s23208393
Gans Š, Molnár J, Kováč D, Kováčová I, Fecko B, Bereš M, Jacko P, Dziak J, Vince T. Driving Signal and Geometry Analysis of a Magnetoelastic Bending Mode Pressductor Type Sensor. Sensors. 2023; 23(20):8393. https://doi.org/10.3390/s23208393
Chicago/Turabian StyleGans, Šimon, Ján Molnár, Dobroslav Kováč, Irena Kováčová, Branislav Fecko, Matej Bereš, Patrik Jacko, Jozef Dziak, and Tibor Vince. 2023. "Driving Signal and Geometry Analysis of a Magnetoelastic Bending Mode Pressductor Type Sensor" Sensors 23, no. 20: 8393. https://doi.org/10.3390/s23208393
APA StyleGans, Š., Molnár, J., Kováč, D., Kováčová, I., Fecko, B., Bereš, M., Jacko, P., Dziak, J., & Vince, T. (2023). Driving Signal and Geometry Analysis of a Magnetoelastic Bending Mode Pressductor Type Sensor. Sensors, 23(20), 8393. https://doi.org/10.3390/s23208393