
Half-Bridge Silicon Strain Gauges with Arc-Shaped Piezoresistors

Abstract
:1. Introduction
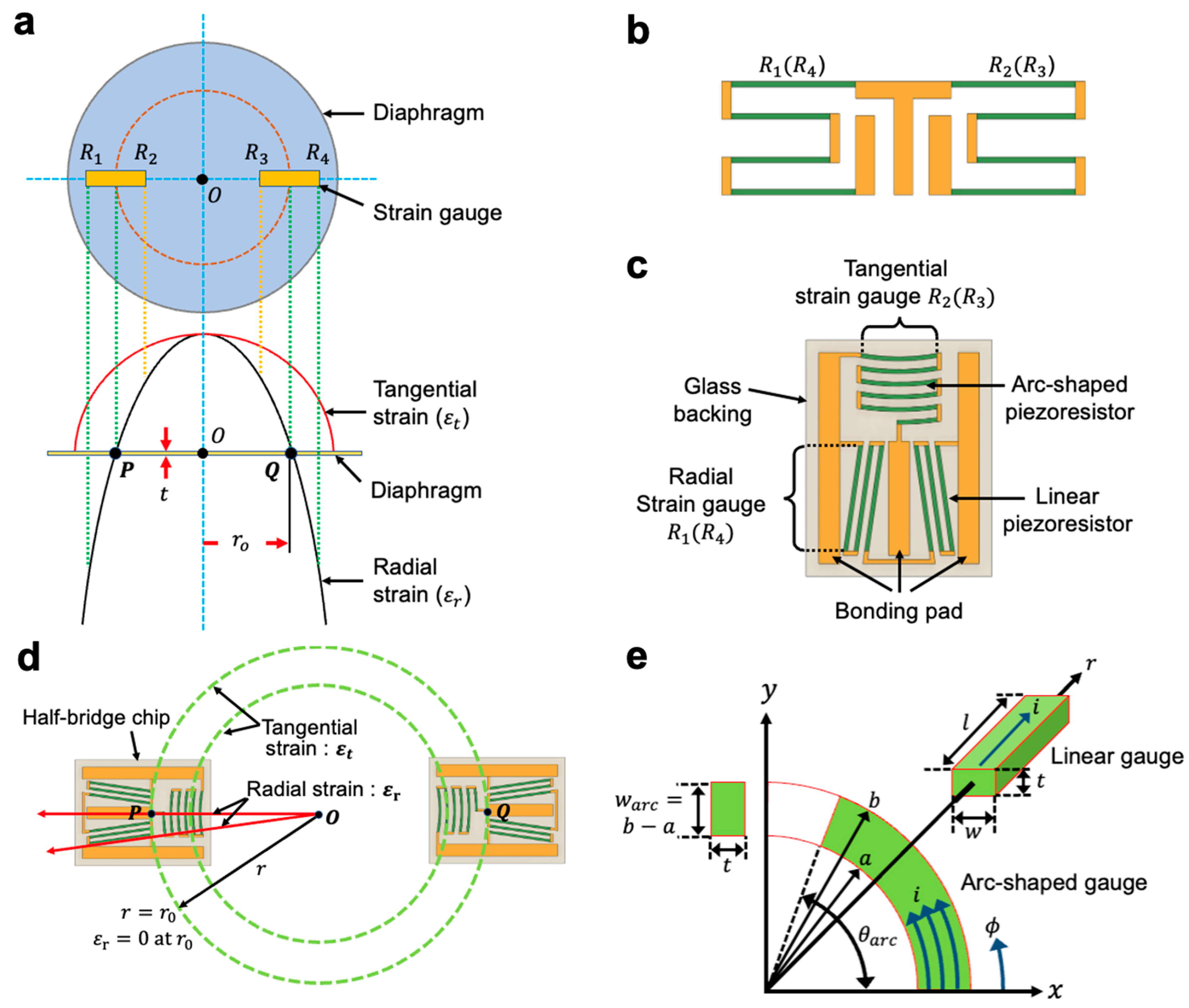
2. Design of a Half-Bridge Strain Gauge
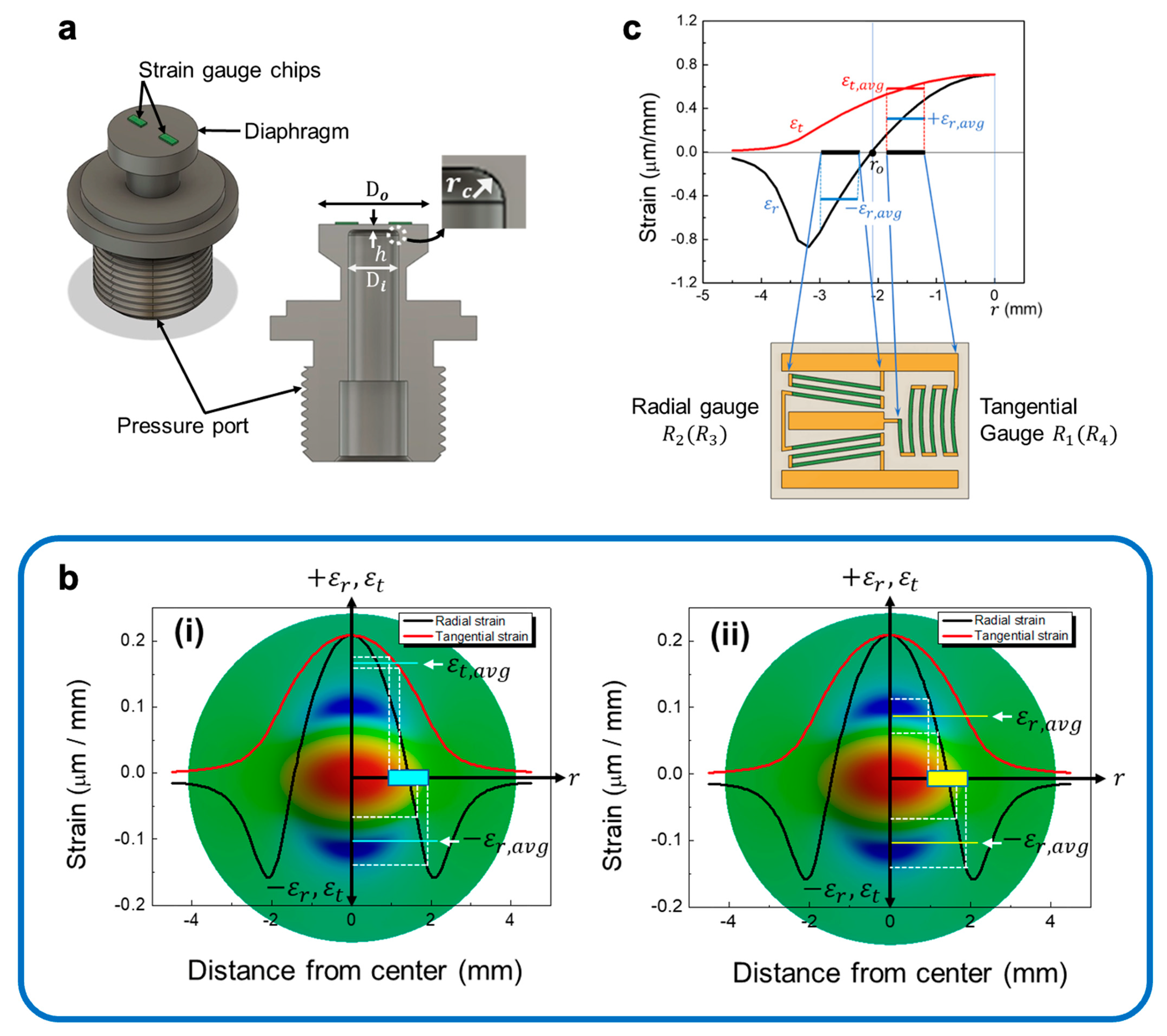
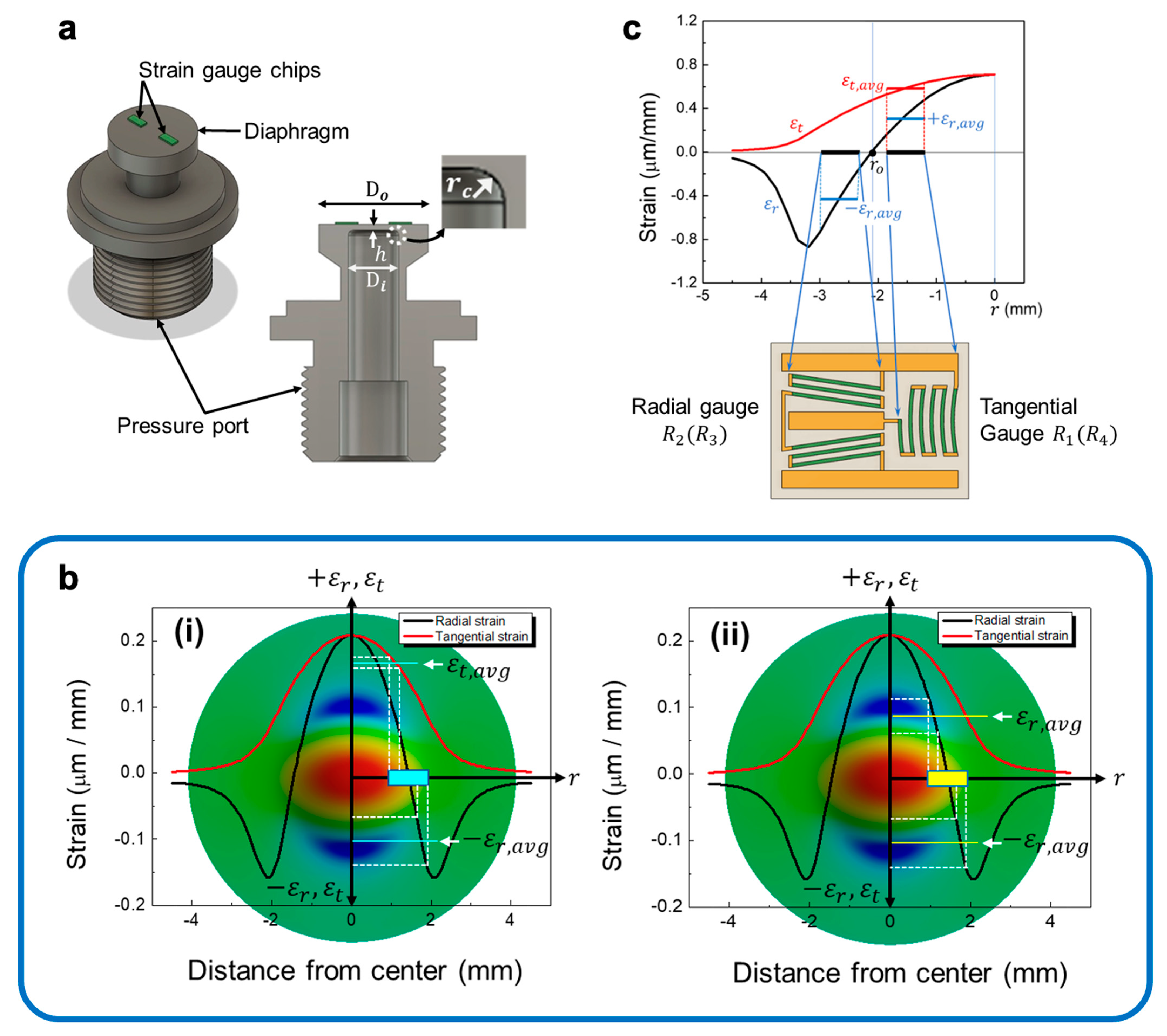
3. Simulation of Pressure-Induced Strains under Half-Bridge
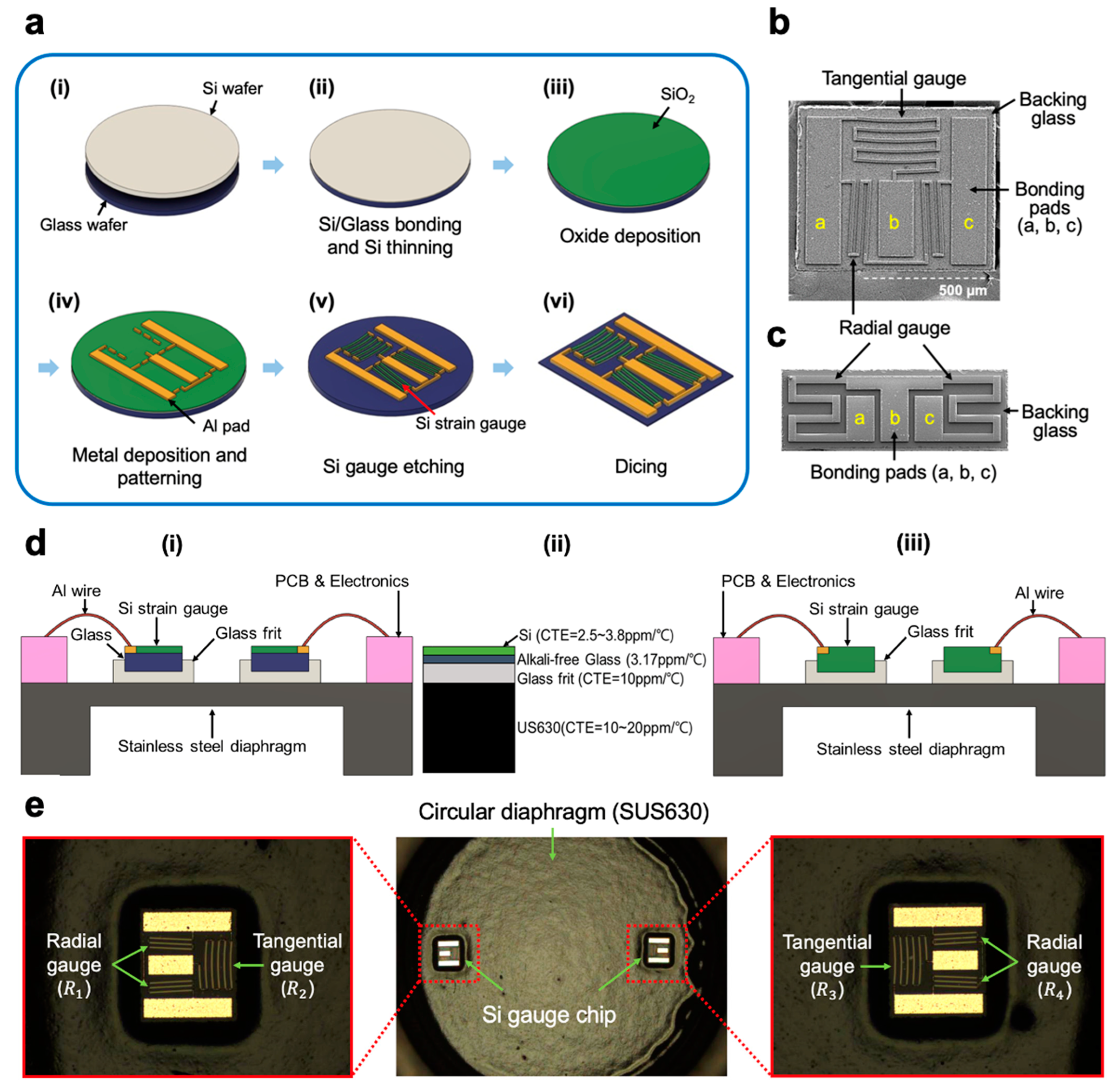
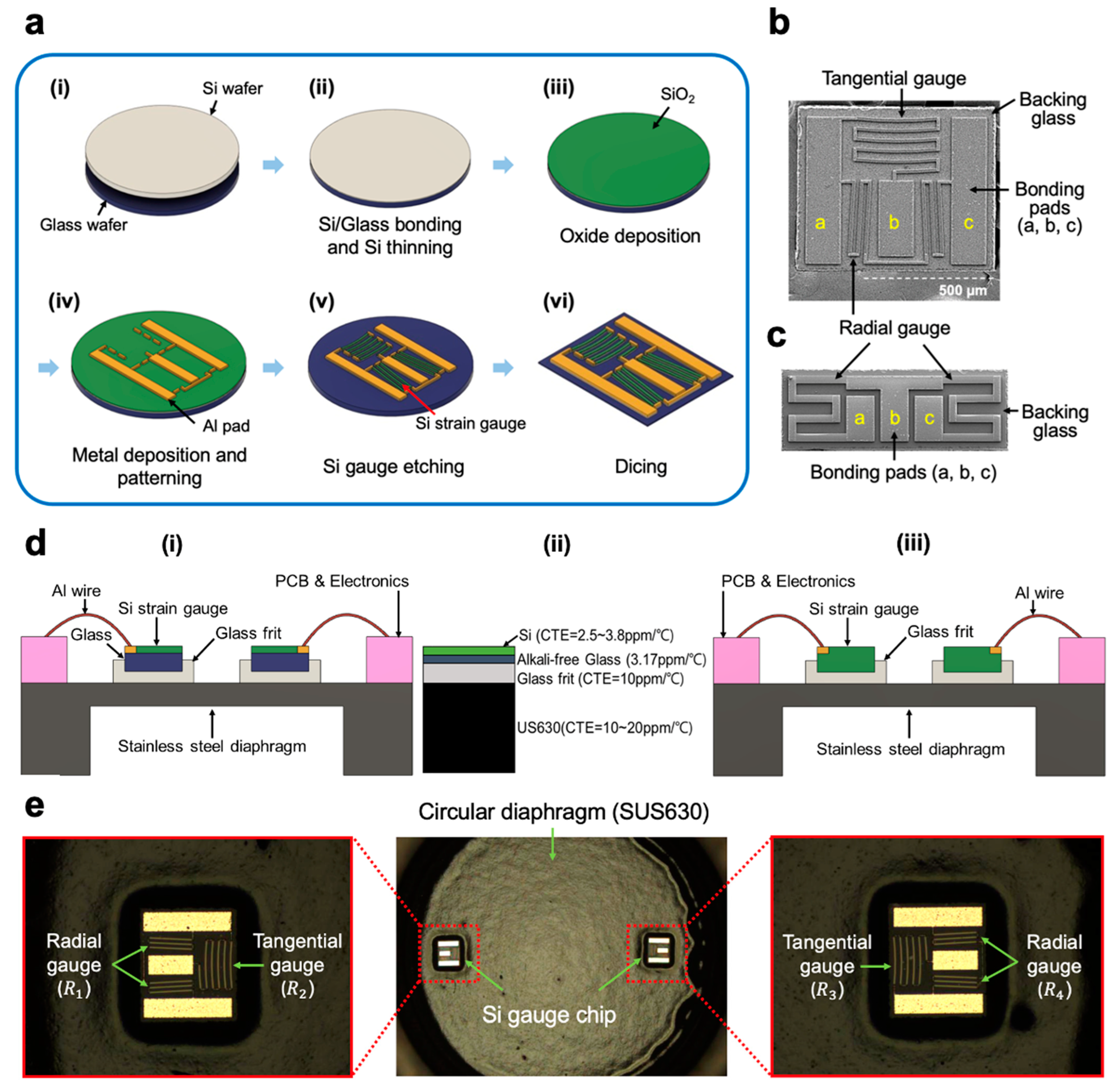
4. Fabrication of Silicon Gauges
5. Gauge Chips and Diaphragm Assembly
6. Results and Discussion
6.1. Determination of Positions and Average Strains for Half-Bridge Gauges
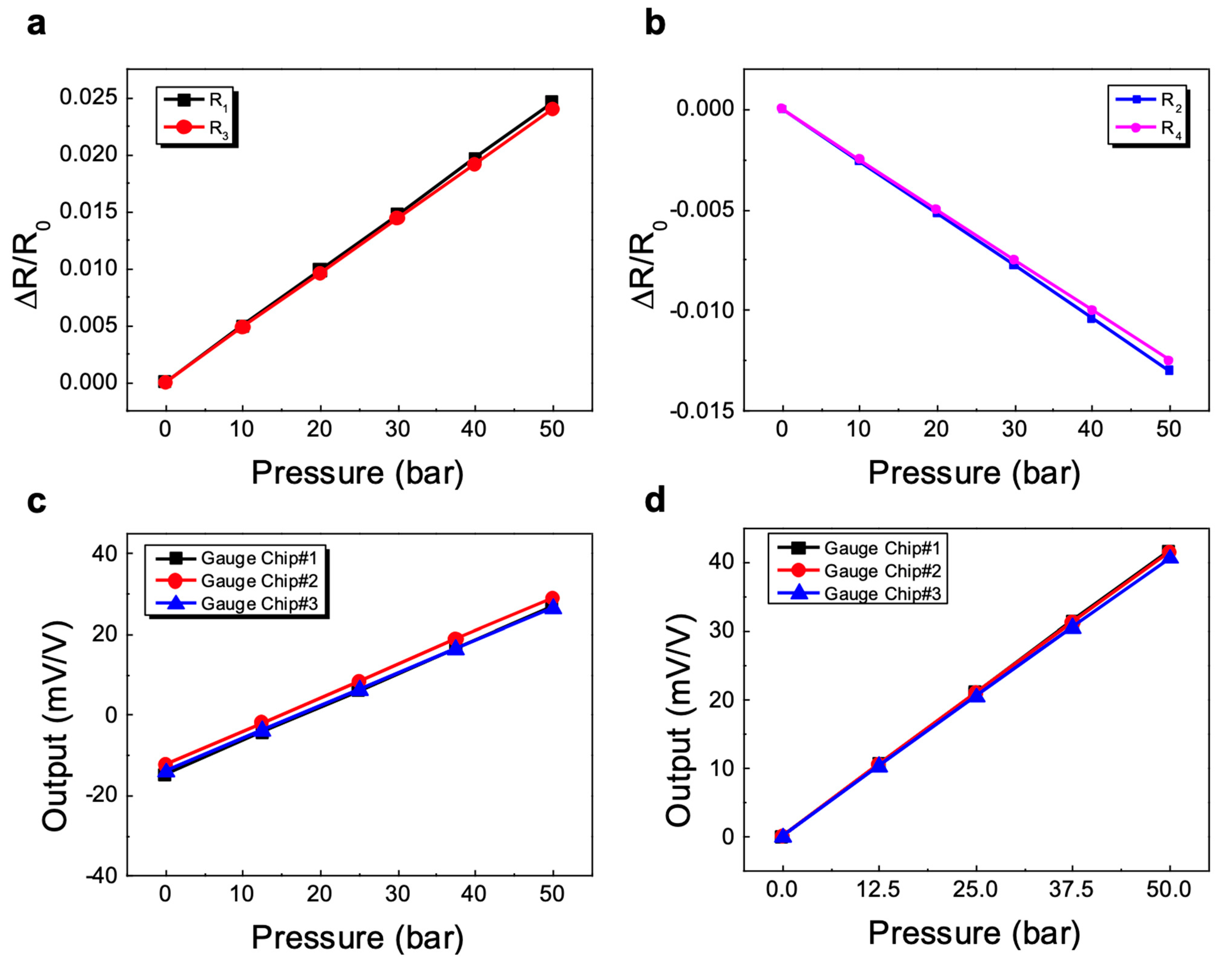
6.2. Characterization of Individual Strain Gauge and Pressure Sensors Based on Half-Bridge Arc-Shaped Strain Gauges
6.3. Temperature Influence on the Output Characteristics
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Absolute Integrated Pressure Sensor. Available online: https://www.melexis.com/en/product/mlx90820/absolute-integrated-pressure-sensor (accessed on 29 August 2022).
- Dan, Q.; Yuan, X.; Zhou, Q.; Liu, S. Study on the Oil-Filled Isolated Pressure Sensor by a Fluid-Solid Coupling Method. In Proceedings of the 2015 16th International Conference on Electronic Packaging Technology (ICEPT), Changsha, China, 11–14 August 2015; pp. 741–745. [Google Scholar]
- Shapero, A.M.; Liu, Y.; Tai, Y.C. Parylene-on-Oil Packaging for Long-Term Implantable Pressure Sensors. Biomed. Microdevices 2016, 18, 66. [Google Scholar] [CrossRef]
- Han, J.H.; Kim, K.B.; Kim, J.H.; Min, N.K. High Withstand Voltage Pressure Sensors for Climate Control Systems. Sens. Actuators A Phys. 2021, 321, 112410. [Google Scholar] [CrossRef]
- Zhang, Z.; Cheng, X.; Leng, Y.; Cao, G.; Liu, S. Silicon Strain Gages Bonded on Stainless Steel Using Glass Frit for Strain Sensor Applications. Meas. Sci. Technol. 2014, 25, 055102. [Google Scholar] [CrossRef]
- Kim, J.H.; Han, J.H.; Park, C.W.; Min, N.K. Enhancement of Withstand Voltage in Silicon Strain Gauges Using a Thin Alkali-Free Glass. Sensors 2020, 20, 3024. [Google Scholar] [CrossRef]
- Zhang, Z.; Cheng, X.; Gui, X.; Chen, X.; Liu, S. A Steel Pressure Sensor Based on Micro-Fused Glass Frit Technology. In Proceedings of the ICEPT-HDP 2012 Proceedings 2012 13th International Conference on Electronic Packaging Technology and High Density Packaging, Guilin, China, 13–16 August 2012; pp. 1582–1585. [Google Scholar]
- Zwijze, A.F.; Kleissen, W.J.P.; Jacobs, F.H.; Wiersma, D.H. Method of Manufacturing a Pressure Sensor. US20170307457A1, 22 December 2020. Available online: https://patents.google.com/patent/US20170307457A1/en?oq=US20170307457A1 (accessed on 4 October 2023).
- Stoetzler, A.; Dittmann, D.; Henn, R.; Jasenek, A.; Klopf, F.; Scharping, A.; Frey, W.; Didra, H.P.; Metz, M. A Small Size High Pressure Sensor Based on Metal Thin Film Technology. In Proceedings of the SENSORS, Atlanta, GA, USA, 28–31 October 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 825–827. [Google Scholar]
- Kraft, M.; White, N.M. MEMS for Automotive and Aerospace Applications; Elsevier: Amsterdam, The Netherlands, 2013; ISBN 0857096486. [Google Scholar]
- Rajanna, K.; Mohan, S.; Nayak, M.M.; Gunasekaran, N.; Muthunayagam, A.E. Pressure Transducer with Au-Ni Thin-Film Strain Gauges. IEEE Trans. Electron Devices 1993, 40, 521–524. [Google Scholar] [CrossRef]
- Sippola, C.B.; Ahn, C.H. A Thick Film Screen-Printed Ceramic Capacitive Pressure Microsensor for High Temperature Applications. J. Micromechanics Microengineering 2006, 16, 1086–1091. [Google Scholar] [CrossRef]
- IWPT Series Wireless Pressure Sensor IWPT-G2502-00|Sensata Technologies. Available online: https://www.sensata.com/products/industrial-iot-hardware/iwpt-series-wireless-pressure-sensor-iwpt-g2502-00 (accessed on 30 August 2022).
- OEM Pressure Sensor—SCT-1—WIKA Denmark. Available online: https://www.wikadanmark.dk/sct_1_en_co.WIKA (accessed on 30 August 2022).
- Keil, S. Technology and Practical Use of Strain Gages: With Particular Consideration of Stress Analysis Using Strain Gages; John Wiley & Sons: Hoboken, NJ, USA, 2017; ISBN 3433606641. [Google Scholar]
- Schomburg, W.K.; Rummler, Z.; Shao, P.; Wulff, K.; Xie, L. The Design of Metal Strain Gauges on Diaphragms. J. Micromechanics Microengineering 2004, 14, 1101–1108. [Google Scholar] [CrossRef]
- Micro-Measurements. Design Consideration for Diaphragm Pressure Transducers; Micro-Measurements: Raleigh, NC, USA, 2003. [Google Scholar]
- Hannah, R.L.; Reed, S.E. Strain Gage Users’ Handbook; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1992; ISBN 0412537206. [Google Scholar]
- Steven Chen, S.-H.; Garza, R.; Ross, C.; Turalski, S. Semiconductor Wafer Having a Thin Die and Tethers and Methods of Making the Same. U.S. Patents US6881648B2, 19 April 2005. Available online: https://patents.google.com/patent/US6881648?oq=6%2c881%2c648B2 (accessed on 29 August 2022).
- Cheng, D.K. Field and Wave Electromagnetics; Pearson Education India: Bengaluru, India, 1989; ISBN 8177585762. [Google Scholar]
- Doll, J.C.; Pruitt, B.L. Piezoresistor Design and Applications; Springer: Berlin/Heidelberg, Germany, 2013; ISBN 1461485177. [Google Scholar]
- EAGLE XG Slim Glass Substrates|Glass Substrate for LCD & Evolving Displays|Corning. Available online: https://www.corning.com/worldwide/en/products/display-glass/products/eagle-xg-slim.html (accessed on 30 August 2022).
- Chuang, T.-K.; Usenko, A.; Cites, J. The Study of the Bonding Energy on Silicon-to-Glass Wafer Bonding. ECS Trans. 2010, 33, 501–507. [Google Scholar] [CrossRef]
- Kim, K. Development and Analysis of High Withstand Voltage Pressure Sensors Based on Silicon Strain Gages-on-a-Glass Substrate. Available online: http://www.riss.kr/search/detail/DetailView.do?p_mat_type=be54d9b8bc7cdb09&control_no=48e0893acc016e0affe0bdc3ef48d419&keyword=Development%20and%20Analysis%20of%20High%20Withstand%20Voltage%20Pressure%20Sensors%20based%20on%20Silicon%20Strain%20Gages-on-a-Glass%20Substrate (accessed on 30 August 2022).
- Leasure, W.A.; Woodruff, N.; Gravel, C. Glass-Bonding Techniques for Semiconductor Strain Gages. Exp. Mech. 1971, 11, 235–240. [Google Scholar] [CrossRef]
- Kim, K.B.; Kim, J.; Park, C.W.; Kim, J.H.; Min, N.K. Glass-Frit Bonding of Silicon Strain Gages on Large Thermal-Expansion-Mismatched Metallic Substrates. Sens. Actuators A Phys. 2018, 282, 230–236. [Google Scholar] [CrossRef]
- Han, J.H.; Min, S.J.; Kim, J.H.; Min, N.K. Reciprocating Arc Silicon Strain Gauges. Sensors 2023, 23, 1381. [Google Scholar] [CrossRef] [PubMed]
- Tilli, M.; Paulasto-Krockel, M.; Petzold, M.; Theuss, H.; Motooka, T.; Lindroos, V. Handbook of Silicon Based MEMS Materials and Technologies; Elsevier: Amsterdam, The Netherlands, 2020; ISBN 012817787X. [Google Scholar]
- How It Works|Engraver’s Network. Available online: https://www.engraversnetwork.com/how-it-works/ (accessed on 29 August 2022).
- Micro-Measurements Inc., Strain Gage Technology. Available online: https://docs.micro-measurements.com/?id=13752 (accessed on 4 October 2023).
- Younis, N.T.; Kang, B. Averaging Effects of a Strain Gage. J. Mech. Sci. Technol. 2011, 25, 163–169. [Google Scholar] [CrossRef]
- Honeywell International Inc. Auto-Zero Calibration Technique for Pressure Sensors A Technical Note. 2021. Available online: https://prod-edam.honeywell.com/content/dam/honeywell-edam/sps/siot/ru-ru/products/sensors/pressure-sensors/common/documents/sps-siot-auto-zero-calibration-technique-pressure-sensors-technical-note-ciid-177856.pdf (accessed on 4 October 2023).
- Gassmann, E. PRESSURE-SENSOR FUNDAMENTALS: Interpreting Accuracy and Error Before You Choose a Pressure-Measuring Instrument, Make Sure That You Fully Understand the Ins and Outs of the Manufacturer-Provided Data. Chem. Eng. Prog. 2014, 110, 37–45. [Google Scholar]
- Nandasiri, G.K.; Shahidi, A.M.; Dias, T. Study of Three Interface Pressure Measurement Systems Used in the Treatment of Venous Disease. Sensors 2020, 20, 5777. [Google Scholar] [CrossRef] [PubMed]
- Tandeske, D. Pressure Sensors: Selection and Application; CRC Press: Boca Raton, FL, USA, 1990; ISBN 0824783654. [Google Scholar]
- TDK. Long-Term Stability Tests for Dies. Available online: https://www.tdk-electronics.tdk.com/download/188342/178a3cc714a817d8172be4bd50917cc1/pdf-as1000001.pdf (accessed on 30 August 2022).
- Liu, S.; Du, X.H.; Zhu, M.J.; Liu, D. Long-Term Stability Enabling Technology of Silicon-Based Piezoresistive MEMS Pressure Sensor. J. Phys. Conf. Ser. 2020, 1520, 012009. [Google Scholar] [CrossRef]
- Täschner, R.; Hiller, E.; Blech, M. Offset Stable Piezoresistive High-Temperature Pressure Sensors Based on Silicon. J. Sens. Sens. Syst. 2016, 5, 197–203. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometric Dimensions | Average Strain | ||
|---|---|---|---|
| Tangential Gauge | Radial Gauge | Tangential Gauge | Radial Gauge |
| thickness | thickness | 0.191 | |
| width | width | ||
| total length | total length | 0.175 | 0.107 |
| Silicon Gauge | Gauge Factor (GF) | Linearity |
|---|---|---|
| Radial gauge () | 119.62 | 0.99 |
| Tangential gauge () | 139.71 | 0.98 |
| Tangential gauge () | 136.57 | 0.99 |
| Radial gauge () | 116.82 | 0.99 |
| Arc Gauge-Based Pressure Sensor | Offset (%FS) | Span (%FS) | Sensitivity (mV/V/bar) | Linearity (%FS) | Repeatability (%FS) | Hysteresis (%FS) |
|---|---|---|---|---|---|---|
| Full-bridge_1 | 0.05 | 0.04 | 0.83 | 0.06 | 0.08 | 0.03 |
| Full-bridge_2 | 0.04 | 0.03 | 0.83 | 0.08 | 0.08 | 0.04 |
| Full-bridge_3 | 0.05 | 0.03 | 0.81 | 0.07 | 0.08 | 0.02 |
| Conventional gauge-based pressure sensor [4] | 0.05 | 0.03 | 0.66 | 0.07 | 0.10 | 0.03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, J.-H.; Min, S.J.; Lee, E.-S.; Kim, J.H.; Min, N.K. Half-Bridge Silicon Strain Gauges with Arc-Shaped Piezoresistors. Sensors 2023, 23, 8390. https://doi.org/10.3390/s23208390
Han J-H, Min SJ, Lee E-S, Kim JH, Min NK. Half-Bridge Silicon Strain Gauges with Arc-Shaped Piezoresistors. Sensors. 2023; 23(20):8390. https://doi.org/10.3390/s23208390
Chicago/Turabian StyleHan, Ji-Hoon, Sung Joon Min, Eun-Sang Lee, Joon Hyub Kim, and Nam Ki Min. 2023. "Half-Bridge Silicon Strain Gauges with Arc-Shaped Piezoresistors" Sensors 23, no. 20: 8390. https://doi.org/10.3390/s23208390
APA StyleHan, J.-H., Min, S. J., Lee, E.-S., Kim, J. H., & Min, N. K. (2023). Half-Bridge Silicon Strain Gauges with Arc-Shaped Piezoresistors. Sensors, 23(20), 8390. https://doi.org/10.3390/s23208390