





Implementation of Deep-Learning-Based CSI Feedback Reporting on 5G NR-Compliant Link-Level Simulator †

 ,
,
Abstract
1. Introduction
- deep networks are very good and adaptable function approximators—they learn the weights of the model optimizing the overall performance through a training process, instead of requiring a rigorous mathematical description that could be hard to extract in complex scenarios;
- DL-based systems could replace manual feature extractors and learning features automatically, flexibly adapting the structure and the parameters of the model, with considerable improvement to the end-to-end performance;
- DL-based algorithms work very well with large amounts of data due to their intrinsic parallel and distributed computing, leading to speeding up of computation;
- DL models can overcome the block structure to provide a complete view of the system and optimize it end-to-end.
- when working in frequency division duplexing (FDD) mode, downlink and uplink could potentially be significantly different. In consequence, to obtain reliable information about the downlink channel, measurements must necessarily be acquired by the user device and then reported to the network; the network will exploit this feedback to properly set the transmission parameters for future downlink transmissions;
- in time-division duplexing (TDD) communications, when downlink and uplink transmissions experience the same channel characteristics, feedback from the device is not necessary, since the network itself can obtain useful information about the downlink features of interest by measuring them in the uplink transmissions.
1.1. Literature Review
1.2. Paper Contribution and Organization
- 1.
- provision of MIMO capabilities through the use of antenna arrays at both the transmitter and receiver sides;
- 2.
- addressing the estimation of the downlink channel affected by noise;
- 3.
- testing the system with a 5G NR fully compliant simulator with a clustered delay line channel model.
2. Channel State Information Reference Signals
- Type I CSI codebooks: designed for single user-MIMO (SU-MIMO) scenarios, where a single user is scheduled within a certain time-frequency resource, transmitting on a potentially large number of layers in parallel;
- Type II CSI codebooks: designed for MU-MIMO scenarios, where many users are scheduled within the same time-frequency resource, each transmitting on a limited number of layers in parallel (two at most).
3. New Radio Link-Level Simulator
3.1. Transmission Chain
- Transport Block generator
- Data are generated as a sequence of bits. Depending on the transport size (A) and the modulation and coding scheme (MCS), in particular, on the code rate (R), the LPDC base graph selection is performed:
- if , or if and , or if , LDPC base graph 2 is used;
- otherwise, LDPC base graph 1 is used.
Input bits are then segmented into different blocks; the CRC parity bits are calculated on and attached to each block. Depending on the LPDC base graph, the maximum dimension of blocks can change. The lowest order information bit is mapped to the most significant bit of the transport block (i.e., parity bits are found at the end of the block). - LDPC encoder
- LPDC coding is applied to the bit sequence for a given code block. N encoded bits are obtained as output, where for LDPC base graph 1 and for LDPC base graph 2 ( value can be found in subclause 5.2.2 of TR 38.212 [42]).
- Rate-matching block
- A rate-matching block is required to adapt the size of the transport block after LDPC coding to the size of the allocated resources that can be used for PDSCH transmission. PDSCH coded bits must be rate-matched around the resource elements occupied by the CSI-RS and other reference signals, otherwise the coding rate may exceed the unit value (i.e., the REs in the slot available for PDSCH are not sufficient to transmit the information bits). In practice, it is expected that the gNB scales down the MCS in the slots where the CSI-RS transmission causes an LDPC coding rate higher than about . This approach is also modelled in the link simulator. The throughput calculation must consider this effect, re-scaling the formula accordingly.
- Scrambling operation
- Before modulation, the codewords (up to two) are scrambled, as in subclause 7.3.1 of [42], resulting in a block of scrambled bits.
- QAM modulation
- The block of scrambled bits for each codeword are QAM-modulated using one of the modulation schemes (selected by the MCS) from table 7.3.1.2-1 [42], resulting in a block of complex-valued modulation symbols.
- Layer and subcarrier mapping
- The modulated symbols are mapped to one or more layers (if multi-layer transmission is enabled), by splitting the codewords (one or two) among them. Then, the symbols are inserted into the actual resource elements of the physical resource block, through a predefined look-up table, based on the 3GPP resource allocation procedure.
- MIMO processing
- The precoding matrix is applied to the PDSCH channel, i.e., sub-carriers containing data. If PMI reporting is enabled, the precoding matrix is selected by the transmitter at the gNB as the j-th element of the codebook, where j is the PMI index reported by the UE. The digital beam-forming scheme implemented in the simulator is wideband; that is, the same beam-forming matrix is applied to all the PRBs. If, instead, the channel estimate is given through feedback by the UE, (e.g., SRS transmission in uplink), downlink beam-forming schemes based on the channel matrix can be applied exploiting the downlink/uplink channel reciprocity.
- CSI-RS mapping
- The transmission of CSI-RS signals in the link-level simulator is modelled in a realistic way. The CSI-RS signals are generated and mapped in the time frequency-grid and configuration parameters set the number of ports and the transmission period, denoted as CSI-RS period, which can take the set of values defined in the 3GPP TS 38.331 [45] specifications. The CSI-RS signals are transmitted once every [4, 5, 8, 10, 16, 20, 32, 40, 64, 80, 160, 320, 640] slots.
- OFDM modulator
- The OFDM modulation is performed through the IFFT Operation. Before the IFFT, an IFFT shift must be applied to properly translate the spectrum into the positive frequency domain. The IFFT must be applied on an OFDM symbol-basis. The channel bandwidth and sub-carrier spacing (SCS) determine the size of the IFFT and the number of samples for each OFDM symbol. At this point a cyclic prefix is added at the beginning of each OFDM symbol, through a look-up table, with a duration selected between “normal” or “extended”. The “normal” option is selected for the simulations according to the used sub-carrier spacing of 30 kHz. This value is compatible with the maximum delay of the channel that falls into the selected CP length.
- Oversampling and filtering
- An oversampling step increases the number of samples for each symbol by a selected factor and the sampling frequency is increased accordingly. A raised cosine filter is used as the transmitting filter.
- Receiver side
- At the receiver side, a finite impulse response filter is applied to remove the undesired frequencies and a down-sampler stage re-samples the signal to the normal frequency, by the same factor as the up-sampler. To account for the delay due to the signal transmission and FIR filter, at each iteration, the signal at the receiver side is buffered and processed on a block basis, where the block length in time is equal to the slot duration. The receiver must then reverse all the signal-processing applied by the transmitter with suitable blocks, such as an OFDM signal demodulator, a sub-carrier demapper, and so on. The MIMO processing consists of the application of a combining matrix over the received symbols to exploit the antenna array at the receiver if more than one antenna is configured. The combining matrix can be used for various purposes, i.e., improving the SINR or for separating the different layers if more than one data stream is transmitted using spatial multiplexing. The LDPC decoder applies the offset min-sum (OMS) decoding algorithm. The performance measurements are applied on the CRC detection for the BLER, while the raw BER is computed on the number of actual erroneous bits before the LDPC decoding. The approximate peak throughput of the simulated NR configuration can be calculated by means of the formula provided in the TS 38.306 3GPP [46] specification:where:
- J is the number of aggregated component carriers in a band or band combination.
- is the maximum LDPC code rate.
- is the maximum number of layers.
- is the maximum modulation order
- is the scaling factor (it can take the values 1, 0.8, 0.75 and 0.4) and is signalled per band or per band combination).
- is the numerology.
- is the average OFDM symbol duration in a subframe for numerology and normal CP, i.e., .
- is the maximum RB allocation in maximum UE supported bandwidth BW(j) with numerology .
- is the overhead (0.14 for DL FR1-0.18 for DL FR2-0.08 for UL FR1-0.10 for UL FR2).
3.2. Channel Model Generation
- Tapped delay line (TDL): for this channel model, the correlation between different antennas is defined statically by a correlation matrix. The TDL model is based on the description of the impulse response of the channel;
- Clustered delay line (CDL): with this channel model the direction of the signal in the space is modelled. The model is based on the description of the main departure and arrival directions of the signal in the space and the number of clusters corresponds to the number of channel reflections.
- cdlModelInit: during the configuration of the link simulator parameters, the channel is initialized and the memory is allocated on the basis of parameter selection (e.g., the allocated memory grows with the number of antenna elements). The mexLock() function is used to reserve memory to the mex application.
- cdlModelRegen: during both the initialization and running phase, the main AoA/AoD of the clusters can be modified to analyze multiple MIMO configurations in a single simulation.
- cdlModelRun: the CDL is generated each slot and is applied to the input data. The time-to-frequency conversion of the channel is applied to report the generated channel matrix as a function of the frequency.
- cdlModelDelete: at the end of the simulation, the memory reserved to the mex application is deallocated using the mexUnlock() function.
4. A Deep Learning-Based CSI Feedback for New Radio
- Encoder: the encoder generates compressed codewords by learning a proper mapping from the estimated channel matrices (dimensionality reduction). It is implemented by the UE.
- Decoder: the decoder tries to recover the original CSI from the codewords generated by the encoder, learning the inverse mapping. It is implemented at the BS sides, whereas the codewords are received from the UE through a feedback channel.
- We sought to make the model compatible with the typical 5G NR MIMO communications, in contrast to the single receiving antenna limitation of [12]. Practically, this introduces a third dimension to the channel matrices due to the different channel coefficients for each receiving antenna.
- We also considered the downlink channel estimation, whereas this additional step was beyond the scope of [12]. This means that, instead of feeding our NR-CsiNet with perfect channel matrices, we provide as input, noisy matrices, estimated through the CSI-RS.
4.1. System Model
- is the complex channel vector relative to the c-th sub-carrier and to the m-th receiving antennas of size ;
- is the complex precoding vector of size ;
- is the complex data symbol transmitted on the c-th sub-carrier;
- denotes the additive noise on the c-th sub-carrier relative to the m-th receiving antenna.
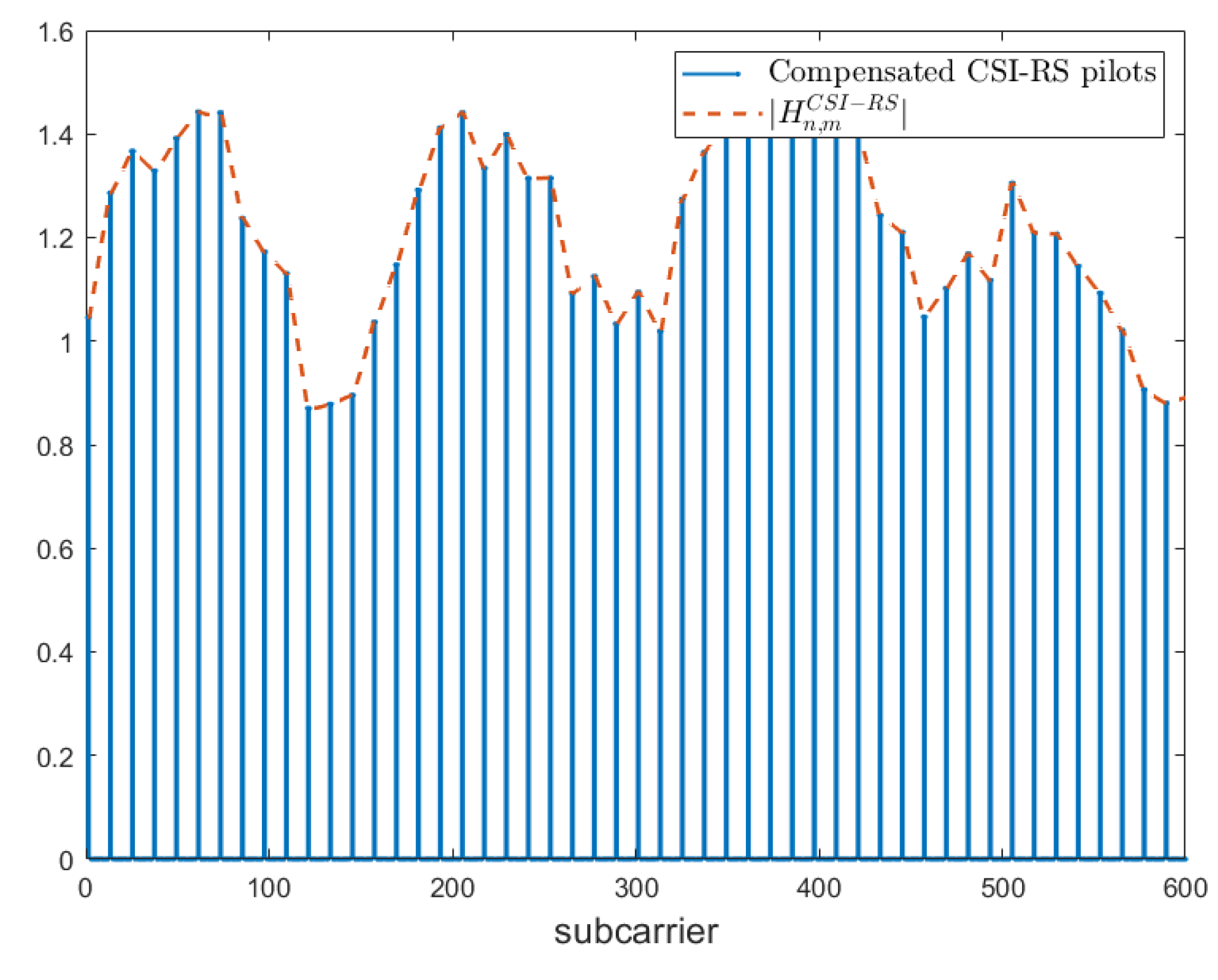
4.2. The Channel Estimation Task
- an ideal channel matrix , generated by the CDL module of the software simulator. It represents the desired output of the NR-CsiNet model;
- a noisy version of the perfect channel matrix , estimated from the CSI-RS pilots by means of a simple interpolation. It represents the input of the NR-CsiNet model.
4.3. DFT-Based Preprocessing of CSI Information
4.4. Multiple Receiving Antennas
- we do not need to train a different CNN model for each distinct receiving antenna;
- the number of parameters learned by the CNN is not affected by the number of receiving antennas M. This means that in massive MIMO scenarios, where , the complexity of the model does not increase with M and, thus, the risk of running into overfitting phenomena remains limited;
- if the different receiving antennas were spatially correlated, this correlation could be exploited during the learning process and, probably, smaller training datasets would be sufficient to obtain effective and generalized models.
4.5. NR-CsiNet Encoder
4.6. NR-CsiNet Decoder
4.7. Training Process
5. Simulation Results
- Time slot
- Time duration of the transport block of data transmission, corresponding to 14 OFDM symbols.
- Modulation and coding scheme (MCS)
- Configuration parameter of the system to determine the coding rate and the order and type of modulation to be adopted for the transmission.
- Transport block size (TBS)
- Value corresponding to the number of bits transmitted in one slot.
- NFFT
- Smaller power of two greater than the number of sub-carriers used by the system to be used by FFT and IFFT operations.
- Number of sub-carriers for data transmission
- Computed as the difference between the NFFT value and the number of sub-carriers composing the band guards. In our system .
- Delay spread model
- Parameter that determines the delay profile, affecting the scaling factor for the time of arrival of each cluster signal, leading to a shorter or longer delay spread.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiang, C.; Zhang, H.; Ren, Y.; Han, Z.; Chen, K.; Hanzo, L. Machine Learning Paradigms for Next-Generation Wireless Networks. IEEE Wirel. Commun. 2017, 24, 98–105. [Google Scholar] [CrossRef]
- Bkassiny, M.; Li, Y.; Jayaweera, S.K. A Survey on Machine-Learning Techniques in Cognitive Radios. IEEE Commun. Surv. Tutor. 2013, 15, 1136–1159. [Google Scholar] [CrossRef]
- Sharma, V.; Bohara, V. Exploiting machine learning algorithms for cognitive radio. In Proceedings of the 2014 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Delhi, India, 24–27 September 2014; pp. 1554–1558. [Google Scholar]
- Murudkar, C.V.; Gitlin, R.D. Optimal-Capacity, Shortest Path Routing in Self-Organizing 5G Networks using Machine Learning. In Proceedings of the 2019 IEEE 20th Wireless and Microwave Technology Conference (WAMICON), Cocoa Beach, FL, USA, 8–9 April 2019; pp. 1–5. [Google Scholar]
- Khan Tayyaba, S.; Khattak, H.A.; Almogren, A.; Shah, M.A.; Ud Din, I.; Alkhalifa, I.; Guizani, M. 5G Vehicular Network Resource Management for Improving Radio Access Through Machine Learning. IEEE Access 2020, 8, 6792–6800. [Google Scholar] [CrossRef]
- Hussain, F.; Hassan, S.A.; Hussain, R.; Hossain, E. Machine Learning for Resource Management in Cellular and IoT Networks: Potentials, Current Solutions, and Open Challenges. IEEE Commun. Surv. Tutor. 2020, 22, 1251–1275. [Google Scholar] [CrossRef]
- Wang, T.; Wen, C.; Wang, H.; Gao, F.; Jiang, T.; Jin, S. Deep learning for wireless physical layer: Opportunities and challenges. China Commun. 2017, 14, 92–111. [Google Scholar] [CrossRef]
- Zhou, R.; Liu, F.; Gravelle, C.W. Deep Learning for Modulation Recognition: A Survey With a Demonstration. IEEE Access 2020, 8, 67366–67376. [Google Scholar] [CrossRef]
- Zhang, M.; Zeng, Y.; Han, Z.; Gong, Y. Automatic Modulation Recognition Using Deep Learning Architectures. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar]
- Rajendran, S.; Meert, W.; Giustiniano, D.; Lenders, V.; Pollin, S. Deep Learning Models for Wireless Signal Classification With Distributed Low-Cost Spectrum Sensors. IEEE Trans. Cogn. Commun. Netw. 2018, 4, 433–445. [Google Scholar] [CrossRef]
- Huang, H.; Guo, S.; Gui, G.; Yang, Z.; Zhang, J.; Sari, H.; Adachi, F. Deep Learning for Physical-Layer 5G Wireless Techniques: Opportunities, Challenges and Solutions. IEEE Wirel. Commun. 2020, 27, 214–222. [Google Scholar] [CrossRef]
- Wen, C.; Shih, W.; Jin, S. Deep Learning for Massive MIMO CSI Feedback. IEEE Wirel. Commun. Lett. 2018, 7, 748–751. [Google Scholar] [CrossRef]
- Wang, T.; Wen, C.; Jin, S.; Li, G.Y. Deep Learning-Based CSI Feedback Approach for Time-Varying Massive MIMO Channels. IEEE Wirel. Commun. Lett. 2019, 8, 416–419. [Google Scholar] [CrossRef]
- Gui, G.; Huang, H.; Song, Y.; Sari, H. Deep Learning for an Effective Nonorthogonal Multiple Access Scheme. IEEE Trans. Veh. Technol. 2018, 67, 8440–8450. [Google Scholar] [CrossRef]
- Huang, H.; Song, Y.; Yang, J.; Gui, G.; Adachi, F. Deep-Learning-Based Millimeter-Wave Massive MIMO for Hybrid Precoding. IEEE Trans. Veh. Technol. 2019, 68, 3027–3032. [Google Scholar] [CrossRef]
- O’Shea, T.; Hoydis, J. An Introduction to Deep Learning for the Physical Layer. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 563–575. [Google Scholar] [CrossRef]
- Ye, H.; Li, G.Y.; Juang, B. Power of Deep Learning for Channel Estimation and Signal Detection in OFDM Systems. IEEE Wirel. Commun. Lett. 2018, 7, 114–117. [Google Scholar] [CrossRef]
- Soltani, M.; Pourahmadi, V.; Mirzaei, A.; Sheikhzadeh, H. Deep Learning-Based Channel Estimation. IEEE Commun. Lett. 2019, 23, 652–655. [Google Scholar] [CrossRef]
- Fascista, A.; De Monte, A.; Coluccia, A.; Wymeersch, H.; Seco-Granados, G. Low-Complexity Downlink Channel Estimation in mmWave Multiple-Input Single-Output Systems. IEEE Wirel. Commun. Lett. 2022, 11, 518–522. [Google Scholar] [CrossRef]
- Kebede, T.; Wondie, Y.; Steinbrunn, J. Channel Estimation and Beamforming Techniques for mm Wave-Massive MIMO: Recent Trends, Challenges and Open Issues. In Proceedings of the 2021 International Symposium on Networks, Computers and Communications (ISNCC), Dubai, United Arab Emirates, 31 October–2 November 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Dahlman, E.; Parkvall, S.; Skold, J. 5G NR: The Next Generation Wireless Access Technology; Elsevier Science, 2018. [Google Scholar]
- 3GPP. Study on Channel Model for Frequencies from 0.5 to 100 GHz; Version 14.3.0; Technical Report (TR) 38.901; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2018. [Google Scholar]
- Riviello, D.G.; Di Stasio, F.; Tuninato, R. Performance Analysis of Multi-User MIMO Schemes under Realistic 3GPP 3-D Channel Model for 5G mmWave Cellular Networks. Electronics 2022, 11, 330. [Google Scholar] [CrossRef]
- Xie, H.; Gao, F.; Jin, S.; Fang, J.; Liang, Y. Channel Estimation for TDD/FDD Massive MIMO Systems With Channel Covariance Computing. IEEE Trans. Wirel. Commun. 2018, 17, 4206–4218. [Google Scholar] [CrossRef]
- Han, Y.; Hsu, T.; Wen, C.; Wong, K.; Jin, S. Efficient Downlink Channel Reconstruction for FDD Multi-Antenna Systems. IEEE Trans. Wirel. Commun. 2019, 18, 3161–3176. [Google Scholar] [CrossRef]
- Cao, Z.; Shih, W.T.; Guo, J.; Wen, C.K.; Jin, S. Lightweight Convolutional Neural Networks for CSI Feedback in Massive MIMO. IEEE Commun. Lett. 2021, 25, 2624–2628. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, A.; Liu, P.; Li, J.; Li, C. A Novel CSI Feedback Approach for Massive MIMO Using LSTM-Attention CNN. IEEE Access 2020, 8, 7295–7302. [Google Scholar] [CrossRef]
- Ji, D.J.; Cho, D.H. ChannelAttention: Utilizing Attention Layers for Accurate Massive MIMO Channel Feedback. IEEE Wirel. Commun. Lett. 2021, 10, 1079–1082. [Google Scholar] [CrossRef]
- Lu, Z.; Wang, J.; Song, J. Binary Neural Network Aided CSI Feedback in Massive MIMO System. IEEE Wirel. Commun. Lett. 2021, 10, 1305–1308. [Google Scholar] [CrossRef]
- Guo, J.; Wen, C.K.; Jin, S. Deep Learning-Based CSI Feedback for Beamforming in Single- and Multi-Cell Massive MIMO Systems. IEEE J. Sel. Areas Commun. 2021, 39, 1872–1884. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, L.; Ding, Z. An Efficient Deep Learning Framework for Low Rate Massive MIMO CSI Reporting. IEEE Trans. Commun. 2020, 68, 4761–4772. [Google Scholar] [CrossRef]
- Zimaglia, E.; Riviello, D.G.; Garello, R.; Fantini, R. A Novel Deep Learning Approach to CSI Feedback Reporting for NR 5G Cellular Systems. In Proceedings of the 2020 IEEE Microwave Theory and Techniques in Wireless Communications (MTTW), Riga, Latvia, 1–2 October 2020; Volume 1, pp. 47–52. [Google Scholar] [CrossRef]
- Ahmadi, S. 5G NR: Architecture, Technology, Implementation, and Operation of 3GPP New Radio Standards; Elsevier Science, 2019. [Google Scholar]
- 3GPP. Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Channels and Modulation (Release 8); Version 8.9.0; Technical Specification (TS) 36.211; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2009. [Google Scholar]
- 3GPP. Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Channels and Modulation (Release 10); Version 10.7.0; Technical Specification (TS) 36.211; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2013. [Google Scholar]
- 3GPP. Evolved Universal Terrestrial Radio Access (E-UTRA); Further Advancements for E-UTRA Physical Layer Aspects (Release 9); Version 9.0.0; Technical Specification (TS) 36.814; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2010. [Google Scholar]
- 3GPP. NR; Physical Layer Procedures for Data (Release 15); Version 15.9.0; Technical Specification (TS) 38.214; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2020. [Google Scholar]
- Roy, R.H. Spatial division multiple access technology and its application to wireless communication systems. In Proceedings of the 1997 IEEE 47th Vehicular Technology Conference. Technology in Motion, Phoenix, AZ, USA, 4–7 May 1997; Volume 2, pp. 730–734. [Google Scholar]
- Liu, L.; Chen, R.; Geirhofer, S.; Sayana, K.; Shi, Z.; Zhou, Y. Downlink MIMO in LTE-advanced: SU-MIMO vs. MU-MIMO. IEEE Commun. Mag. 2012, 50, 140–147. [Google Scholar] [CrossRef]
- Spencer, Q.H.; Peel, C.B.; Swindlehurst, A.L.; Haardt, M. An introduction to the multi-user MIMO downlink. IEEE Commun. Mag. 2004, 42, 60–67. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, R. Achievable DoF Regions of Three-User MIMO Broadcast Channel With Delayed CSIT. IEEE Trans. Commun. 2021, 69, 2240–2253. [Google Scholar] [CrossRef]
- 3GPP. NR; Physical Channels and Modulation; Version 15.6.0; Technical Specification (TS) 38.211; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- 3GPP. NR; Multiplexing and Channel Coding; Version 15.6.0; Technical Specification (TS) 38.212; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- 3GPP. NR; Physical Layer Procedures for Control; Version 15.6.0; Technical Specification (TS) 38.213; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2019. [Google Scholar]
- 3GPP. Radio Resource Control (RRC); Protocol Specification; Version 16.1.0; Technical Report (TR) 38.331; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2020. [Google Scholar]
- 3GPP. User Equipment (UE) Radio Access Capabilities; Version 15.3.0; Technical Report (TR) 38.306; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2018. [Google Scholar]
- 3GPP. NR; Study on Test Methods; Version 2.4.0; Technical Report (TR) 38.810; 3rd Generation Partnership Project (3GPP): Valbonne, France, 2018. [Google Scholar]
- Tensorflow Keras Module. Available online: https://www.tensorflow.org/api_docs/python/tf/keras (accessed on 5 January 2023).
- ReLU Keras API. Available online: https://keras.io/api/layers/activation_layers/relu/ (accessed on 5 January 2023).
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning (Adaptive Computation and Machine Learning); MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Batch Normalization Keras API. Available online: https://keras.io/api/layers/normalization_layers/batch_normalization/ (accessed on 5 January 2023).
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Softmax Keras API. Available online: https://keras.io/api/layers/activation_layers/softmax/ (accessed on 5 January 2023).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NR Simulator Parameters | |
|---|---|
| System bandwidth | 5 MHz |
| Subcarrier spacing | 15 kHz |
| Time slot | 1 ms |
| Carrier frequency | 3.64 GHz |
| iMCS | 21 |
| (Modulation, coding rate) | (64-QAM, 0.694) |
| TBS | 19,968 bit |
| NFFT | 512 |
| 300 | |
| Transmission layers | 1 |
| Codewords | 1 |
| CSI-RS Tx period | 4 slots |
| CSI reporting type | Type I |
| Channel model | CDL-B |
| Delay spread model | Nominal |
| NR-CsiNet Parameters | |
|---|---|
| Training set | 1000 sim of 100 slots |
| Validation set | 100 sim of 100 slots |
| Testing set | 100 sim of 100 slots |
| Learning rate | 0.001 |
| Loss function | MSE |
| Optimizer | Adam |
| Epochs | 300 |
| RefineNet units | 2 |
| 3 | |
| K | Parameters | FLOPs |
|---|---|---|
| 5.381 | 179.200 | |
| 10.725 | 243.200 | |
| 21.411 | 371.200 | |
| 42.785 | 627.200 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Riviello, D.G.; Tuninato, R.; Zimaglia, E.; Fantini, R.; Garello, R. Implementation of Deep-Learning-Based CSI Feedback Reporting on 5G NR-Compliant Link-Level Simulator. Sensors 2023, 23, 910. https://doi.org/10.3390/s23020910
Riviello DG, Tuninato R, Zimaglia E, Fantini R, Garello R. Implementation of Deep-Learning-Based CSI Feedback Reporting on 5G NR-Compliant Link-Level Simulator. Sensors. 2023; 23(2):910. https://doi.org/10.3390/s23020910
Chicago/Turabian StyleRiviello, Daniel Gaetano, Riccardo Tuninato, Elisa Zimaglia, Roberto Fantini, and Roberto Garello. 2023. "Implementation of Deep-Learning-Based CSI Feedback Reporting on 5G NR-Compliant Link-Level Simulator" Sensors 23, no. 2: 910. https://doi.org/10.3390/s23020910
APA StyleRiviello, D. G., Tuninato, R., Zimaglia, E., Fantini, R., & Garello, R. (2023). Implementation of Deep-Learning-Based CSI Feedback Reporting on 5G NR-Compliant Link-Level Simulator. Sensors, 23(2), 910. https://doi.org/10.3390/s23020910