1. Introduction
Active analog frequency filters represent an important part in sensor applications [
1] (electrocardiographic systems, phase-sensitive detection, biosensors, for instance). The design procedure of (analog) frequency filters, as one of the fundamental building blocks of many applications in various industry branches, deals with many inherent problems. Frequency filters are implemented to approximate the ideal characteristic (immediate turnover of pass-band area to stop-band area especially), since the ideal filter characteristics in practice cannot be achieved. Thus, various approximations have been created in accordance with the desired transfer properties of the filter [
2]. These transfer properties can be specified by the following criteria: (a) the steepness of the transition between the pass-band and stop-band of the magnitude characteristics, (b) the linearity of the phase response, (c) the flatness of the group delay, (d) the ripple of the magnitude characteristics in the pass-band area, (e) the overshot of the step response, and (f) the sensitivity of individual filter parameters in dependence on the selected approximation. Therefore, the proper selection of the approximation is of great importance in the design procedure of a filter as it fundamentally affects the resulting behavior of the filter and consequently the behavior of the whole application [
3]. Despite the existence of many various approximations, the selection is usually limited to available standard approximations. In fact, the process of the selection of a suitable approximation in active analog low-frequency (up to hundreds of megahertz) filters, regardless of its importance, is often limited to the selection of the most typical choice (i.e., Butterworth approximation).
Some papers [
4,
5,
6,
7,
8] have focused on the comparison of multiple approximations in accordance with the above-mentioned criteria in search for the optimal filter design for an intended solution. It is a well-known fact that better characteristics of the magnitude response (the high steepness of the transition between the pass-band and stop-band area) lead to the worse characteristics in the case of the time (the overshoot of the step response) and phase (linearity of the phase response and flatness of the group delay) responses and vice versa. Therefore, we usually look for some compromise or a specific characteristic that is most important for us in a given scenario. We can identify typical frequency filters having Butterworth approximation [
9,
10,
11,
12,
13], filters having Bessel approximation [
14,
15,
16], filters having Elliptic (also called Cauer) approximation [
17,
18,
19], filters having Chebyshev approximation [
20,
21,
22,
23] and filters having Inverse Chebyshev approximation [
24,
25,
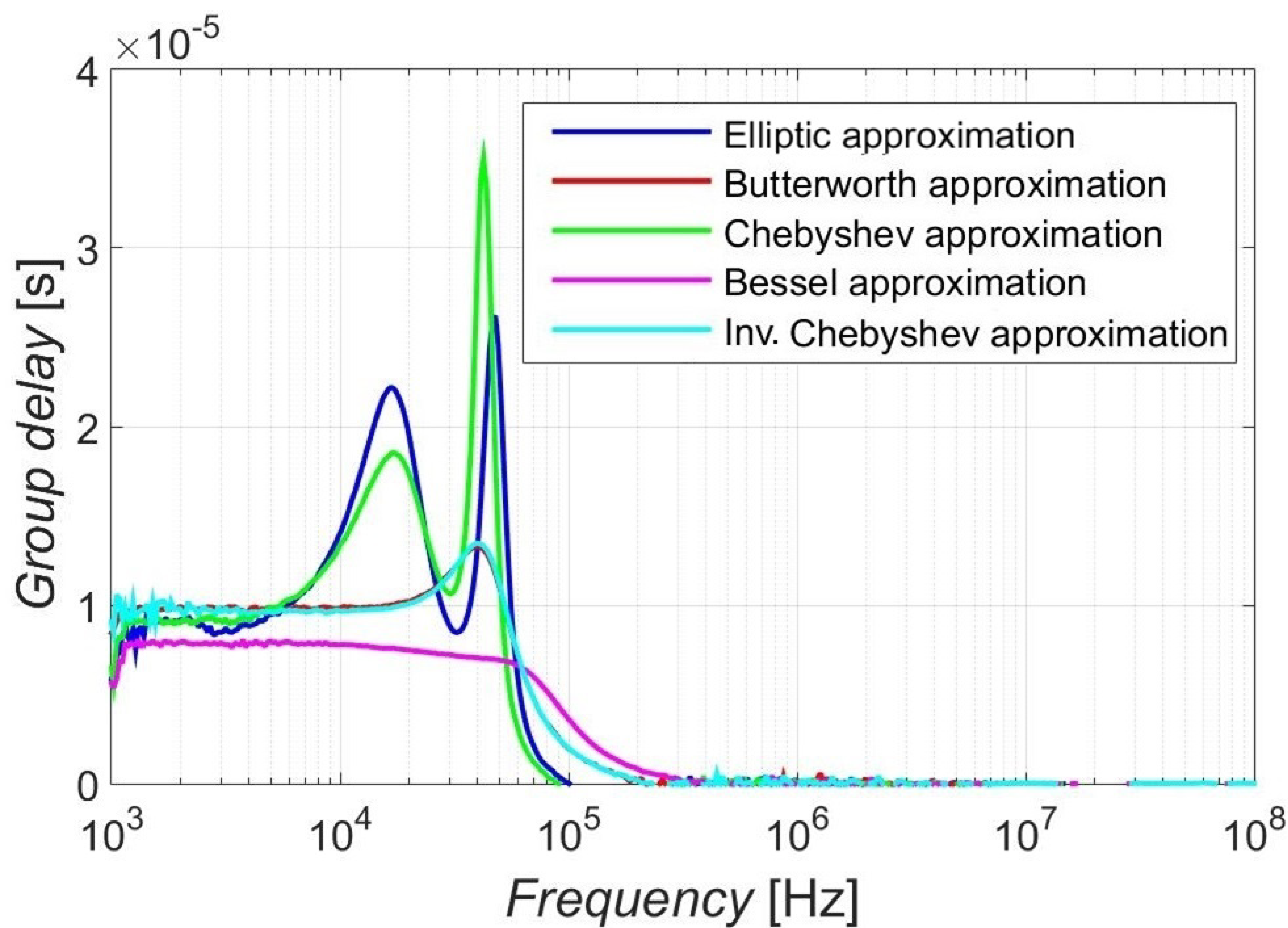
26]. Considering the steepness of the transition between the pass-band and stop-band area of the magnitude response, Elliptic and Chebyshev approximations are steepest. Bessel approximation offers the least-steep transition. Opposed to the highest steepness of Elliptic and Chebyshev approximations, these approximations are characterized by the ripple in their pass-band area, unlike Butterworth, Inverse Chebyshev and Bessel approximations. Bessel approximation has the flattest group delay in contrast with the approximations with high steepness (Elliptic and Chebyshev). Butterworth and Inverse Chebyshev approximations show their average properties when it comes to the group delay response. Similarly, Bessel approximation provides the best step-response results, with minimal overshots, at the expense of the steepness of the transition in contrast to Elliptic and Chebyshev approximations. The average transient characteristics, again, are offered by Butterworth and Inverse Chebyshev approximations [
3].
From the proposed research [
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26], some circuit solutions [
12,
13,
15] present more than one filtering function. However, these functions are typically available from individual circuits (each filter type has its own topology). Similarly, papers [
14,
16,
17,
18,
25,
26] has offered the designs of various orders. However, each filter of a given order was proposed as a single-purpose circuit (each filter was proposed as an individual topology). Only the solution in [
12] allows the reconfiguration of the type and order of the resulting filtering function (from a single topology) by the implementation of a switching mechanism. Furthermore, as evident from [
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26], the filters typically follow one particular approximation. This approximation then determines the features of the filter and consequently the applicability of the filter in accordance with the desired requirements of a particular application. Thus, the possibility to select or modify (readjust) the approximation of the filter offers a wider range of applicability of the filter and also an additional degree of freedom for the change in the magnitude/phase/transient response.
The above-mentioned issues can be solved by so-called reconnection-less reconfigurable filters [
27,
28,
29,
30,
31,
32,
33,
34,
35,
36]. These filters are defined as two-port structures (containing one input and one output terminal), where the resulting transfer function (type) is given by the electronic means. This concept originates from the reconnection-less reconfigurable frequency filters working in microwave systems [
27,
28,
29,
30,
31,
32], where the reconfiguration of the transfer function is achieved by the electromagnetic coupling of elements. From the reconnection-less reconfigurable frequency filters working in the microwave bands, the proposal in [
30,
31,
32] considers the possibility to change the approximation characteristics. The proposed filter in [
30] can change between a band-pass function of Chebyshev and Elliptic characteristics. The solution in [
31] provides a band-pass function with Butterworth characteristics and a band-stop function with Chebyshev characteristics. The filter in [
32] offers a possibility to change between a band-pass function with Chebyshev and Elliptic characteristics. In case of the low-frequency (up to hundreds of megahertz) reconnection-less reconfigurable filters [
33,
34,
35,
36], the reconfiguration is performed by the setting of electronically controllable parameters (continuous electronic control) of modern active elements rather than by switching between the inputs and/or outputs of a given filter, or any modification of the internal topology of the filter. Therefore, the resulting transfer function can be changed by the control DC current or voltage externally applied to a chip, instead of the switching or any topological modification of the internal structure (which is typically not possible in the case of on-chip implementation). Moreover, the presence of the continuous electronic control offers a feature of fine-tuning of the resulting function and the possible adjustment of the stop-band/pass-band area. The filters in [
33,
34,
35] provide the ability to change between different types of the transfer function, while the solution in [
36] can also change the order (slope between pass and stop band) of the used transfer function.
The practical applications of adjustable and reconfigurable filters can be found in wireless communication and cognitive radio environments, where these filters can be helpful to radio systems in order to isolate signals of interest or attenuate interfering signals depending on the current state of the cognitive environment, as demonstrated in [
30,
31,
32]. These filters usually can change their transfer function between band-pass and band-stop or all-pass functions, or change their approximation type, as mentioned earlier. The reconfigurable filters are also useful in adaptive filtering [
37,
38,
39,
40], where automatic adjustment of standard and special transfer responses is welcomed. In addition, the presented solution simplifies ways of design and the overall complexity used, for example, in [
37,
38]. Adaptive filtering has benefits also for the preprocessing of a signal before analog-to-digital conversion [
39], as well as communication systems (interference cancellation) [
40].
Table 1 provides a comparison of higher-order (>2) filters referenced in the introduction. This table indicates the following disadvantages of the previously proposed filters:
To the best of the authors’ knowledge, there has been no report of a low-frequency current-mode filter offering the electronic change in the approximation characteristics. The designed filter offers the feature of the electronic change in the used approximation (tested for Butterworth, Bessel, Elliptic, Chebyshev and Inverse Chebyshev approximations) and reconnection-less reconfiguration of the order (providing the low-pass function of the 1st, 2nd, 3rd and 4th order). The electronic adjustment of the cut-off frequency is also possible. The proposal is verified by PSpice simulations together with the experimental measurements of the implemented filter. The further analysis is focused on the comparison of the features of the filter depending on the selected approximation.
2. Description of the Filter
The filtering topology, originally proposed in [
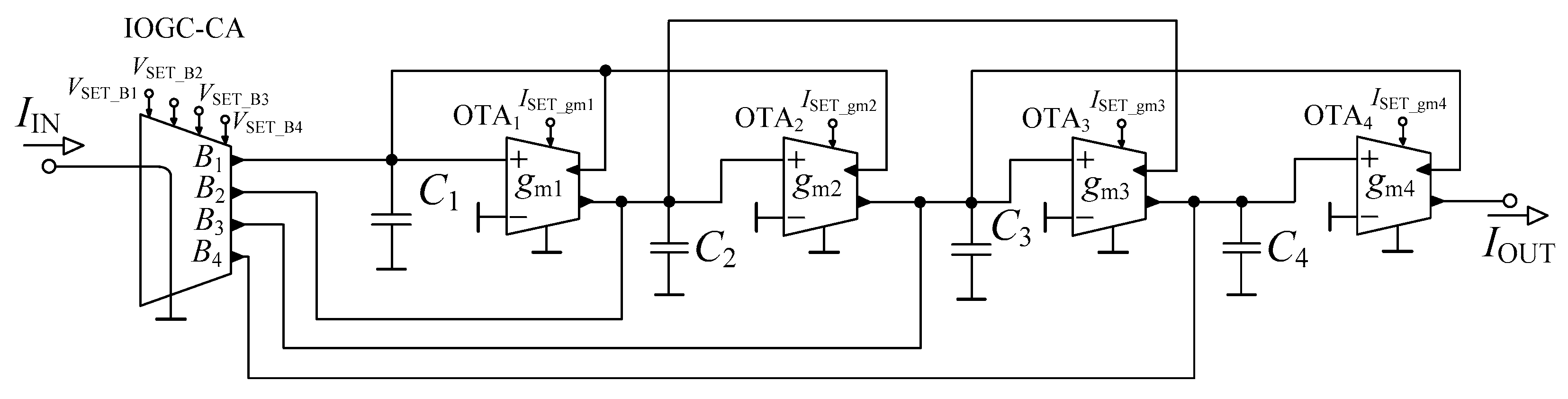
36] for purposes of the fractional-order current-mode reconnection-less reconfigurable low-pass filter of various orders, was suitably applied to operate as a filter with a reconnection-less reconfiguration of its order and electronic change in used approximation. The filter (
Figure 1) was based on the 4th-order leap-frog topology, employing four Operational Transconductance Amplifiers (OTAs) [
41], one current amplifier with independently controlled outputs (referred to as Individual Output Gain Controlled Current Amplifier (IOGC–CA)) and four grounded capacitors.
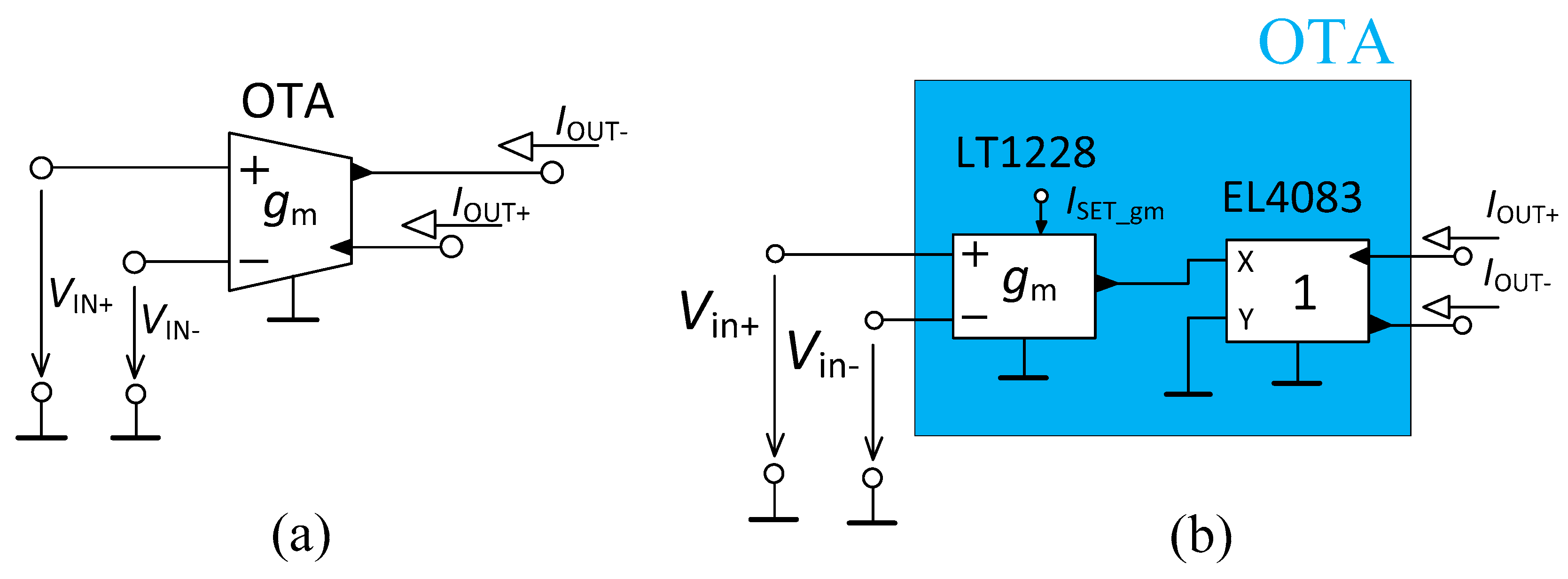
The schematic symbol of the OTA and its used implementation is shown in
Figure 2a,b, respectively. The behavior of the OTA element can be described by the relation
IOUT± = ±
gm (
VIN+ −
VIN–), where
gm denotes the transconductance of the OTA. The OTA in the filter structure requires two outputs (of the opposite polarity). Since the commercially available devices, working as the OTA, typically offer only one output, the implemented solution was created by one LT1228 device [
42] functioning as the OTA (
gm tunable by DC control current
ISET_gm) and one EL4083 device [
43] (it copies the output current of the OTA and provides two currents of the opposite polarity). Both devices are commercially available. When considering a significant sensitivity of transconductance on temperature variations, external circuits generating the same bias current deviation caused by temperature can be used for auto-compensation of the gm temperature drift of the OTAs when the ambient temperature variation is very large (automotive, military purposes of application). However, based on the application field, the temperature variation expected in standard room conditions has an insignificant impact on the performance of the OTA.
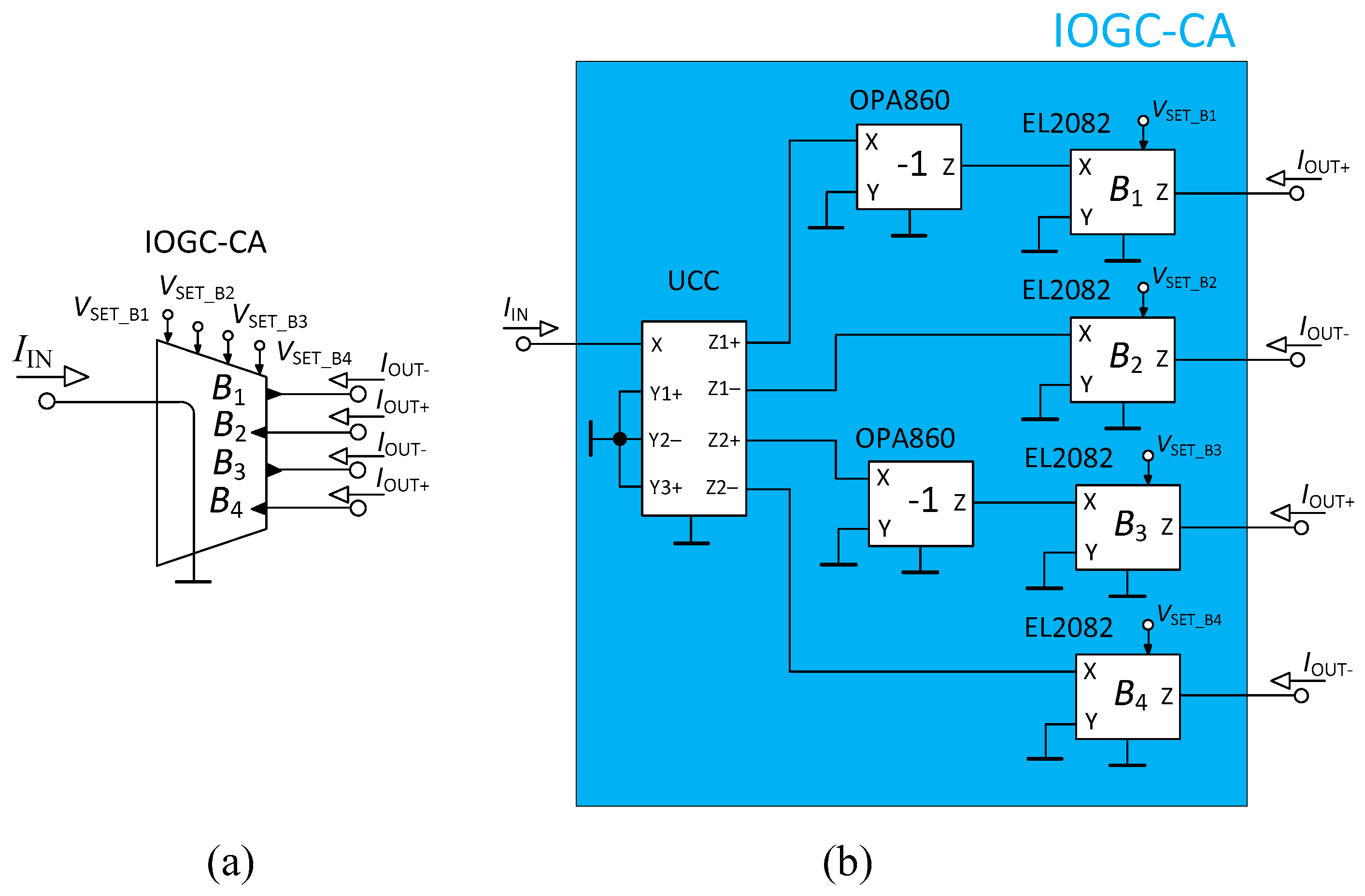
Figure 3 presents the schematic symbol and used implementation of the IOGC–CA element. The IOGC–CA (this particular solution) is described by the relation
IOUT = −
Bi(
IIN), where
Bi stands for the current gain of the individual output of this element; thus,
i = {1, 2, 3, 4}. The IOGC–CA provides the feature of the reconnection-less reconfiguration of the order of the filter based on the setting of the current gains
Bi. It is implemented by one Universal Current Conveyor (UCC) [
44], which is used to provide four copies of the input current (it works as a current follower with two inverting and two non-inverting outputs) and four EL2082 devices [
45] used to adjust the current gain of each output of the IOGC–CA (controllable by DC control voltage
VSET_B). There are also two additional OPA860 devices [
46] (added in order to invert the polarity of the currents so all available transfer functions have the same polarity). Both EL2082 and OPA860 are commercially available. The UCC is not commercially available; nonetheless, it could be implemented by three EL4083 devices or by a suitable CMOS structure, for instance. The inner topology of the IOGC–CA in case of the CMOS structure could be simplified as the outputs of the UCC could be all designed with the same polarity (inversion performed by the OPA860 devices would not be necessary).
The transfer function of the filter (
Figure 1) is expressed as
K(
s) =
N(
s)/
D(
s), where
Equation (1) indicates clear dependence of the resulting order of the function on the setting of current gains B1 to B4 cancelling corresponding terms of the numerator if a specific current gain is set to zero. For instance, the 4th-order LP function will be available when B1 = 1, B2 = B3 = B4 = 0. Also, the resulting filtering response can be amplified if particular current gain B is higher than 1. Furthermore, the obtainment of the selected approximation characteristics is achieved through the change in the values of the transconductances, dependent on particular coefficients of the transfer function (regarding the chosen approximation). Moreover, if the particular implementation of the current amplifiers offers the analog (continuous) control of their current gain, this feature can be used to adjust the pass-band gain of the output response (fine tuning) if the pass band does not have the unity gain (is not exactly 0 dB due to inaccuracy of filter parameters and values of passive parts).
3. General Design Verification
The design was verified using PSpice simulations and experimental measurements. The simulations were performed using models in TSMC 0.18 µm CMOS technology. Used models of OTA, the current amplifier and current follower can be found in [
33,
47,
48]. The transconductance of the OTA model and the current gain of the current amplifier model were adjusted using a DC control current. The supply voltage of all used models was ±1 V.
The practical implementation of individual active elements was performed by the UCC, EL2082, EL4083, LT1228 and OPA860, as introduced in the previous section. The UCC, made by Brno University of Technology, and the ON Semiconductor design center in I3T 0.35 µm CMOS technology, used a supply voltage of ±1.65 V. The remaining used active elements used a supply voltage of ±5 V. The measurement itself was performed by a network analyzer Agilent 4395A utilizing voltage-to-current and current-to-voltage converters constructed by OPA860 and OPA861 [
49] devices.
Figure 4 shows the implemented PCB of the used filter.
The design of the filters of a higher order (>2) is usually performed by the cascade combination of individual 1st- and 2nd-order filters. For the direct design, coefficients of the transfer function (coefficients
b), depending on the chosen order and approximation, have to be calculated [
3]. In our case, the coefficients were calculated using a design tool NAF [
50] (or they can be obtained from tables with normalized coefficients of the transfer function as in [
3], for instance). The general 4th-order transfer function had the form given by (3). The terms contained in the numerator may vary (based on filter type), as long as the order of the highest polynomial term(s) is not higher than the order of the highest polynomial in the denominator in order for the circuit to be stable. Coefficients
b can then be obtained based on chosen parameters such as the angular frequency, approximation, steepness of the transition, etc., (the tolerance field) from design tables or NAF.
The following specification of the tolerance field for the calculation of the coefficients, was used: approximation—(gradually) Elliptic, Butterworth, Chebyshev, Bessel and Inverse Chebyshev, operational angular frequency, 300,000 rad/s (
f0 ≈ 47 kHz) (this frequency was chosen considering the bandwidth limitations of the used active elements (5–10 MHz) so there were at least two decades before the response was affected by parasitic characteristics); ripple in the pass band (if any)—
KP = 3 dB, stop-band frequency
fS—3,000,000 rad/s (470 kHz); transfer in stop band (
KS)—depending on used approximation in order to create the transfer function of a given order (4th-order) −84 dB (Elliptic), −77 dB (Butterworth), −73 dB (Chebyshev), −65 dB (Bessel), and −73 dB (Inverse Chebyshev). Based on the selected approximation, the coefficients of the transfer function were calculated, as stated in
Table 2.
The relations for the transconductances
gm1 to
gm4 can be expressed by the comparison of individual terms of the denominator of the transfer function of the filter (2) and the general transfer function of the 4th-order (3):
If choosing the values of capacitors
C1 =
C2 =
C3 =
C4 = 1 nF, the resulting values of the transconductances (based on coefficients from
Table 2) are given in
Table 3.
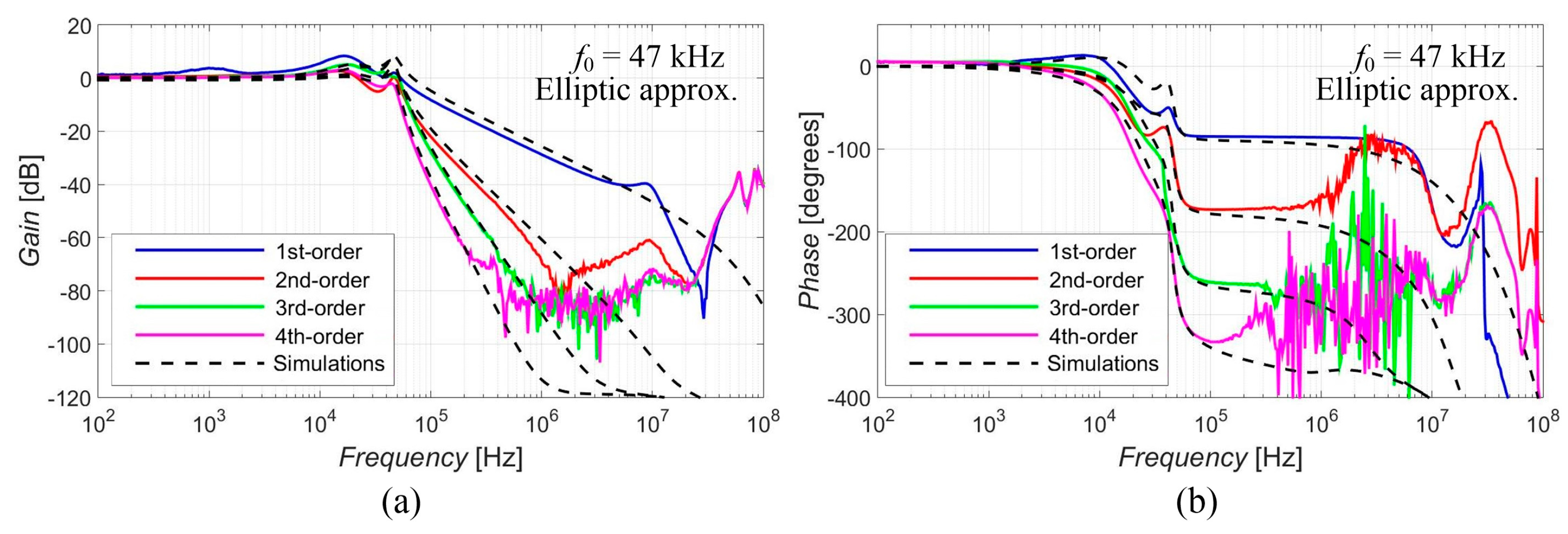
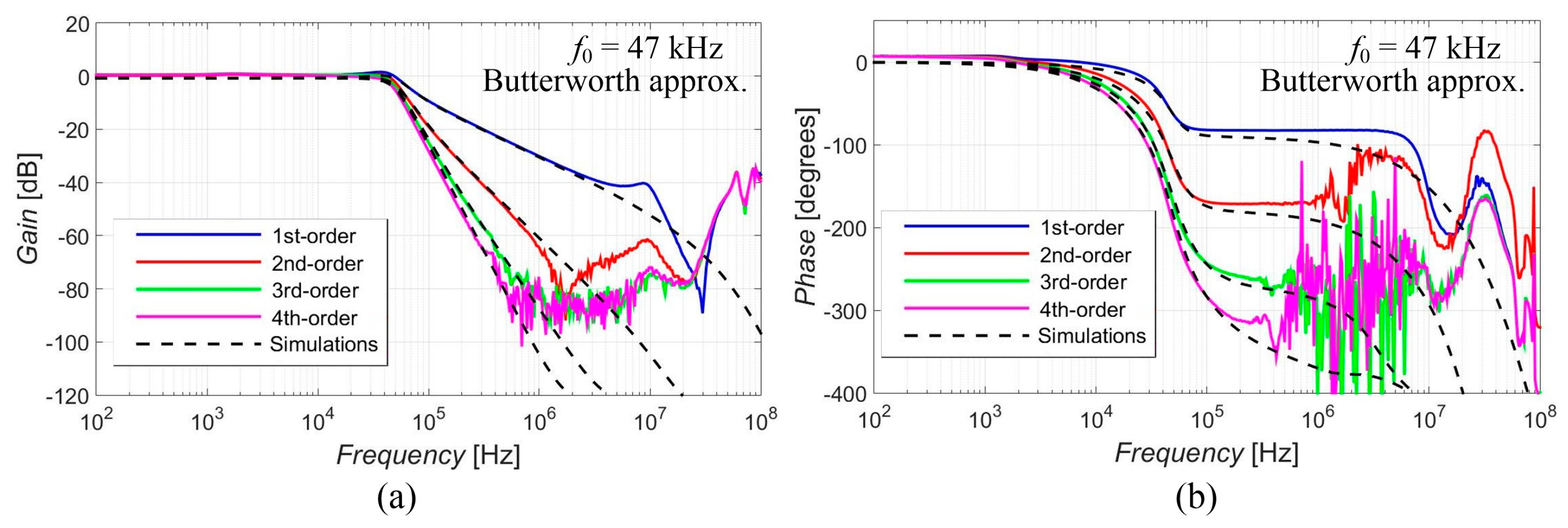
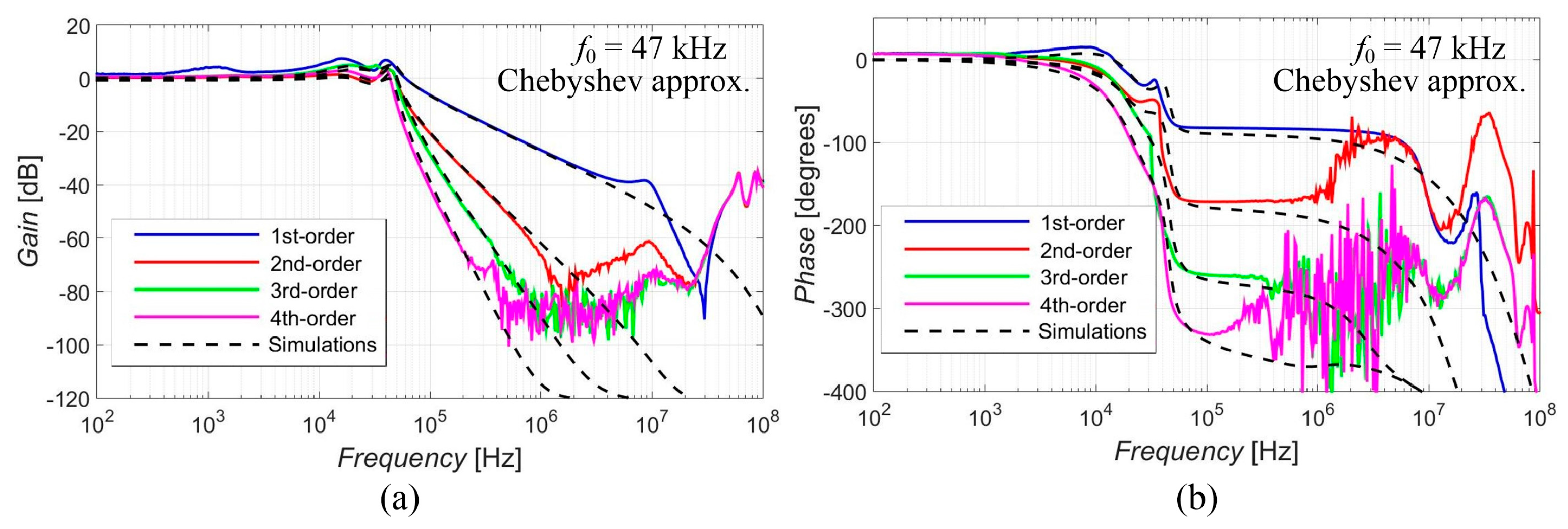
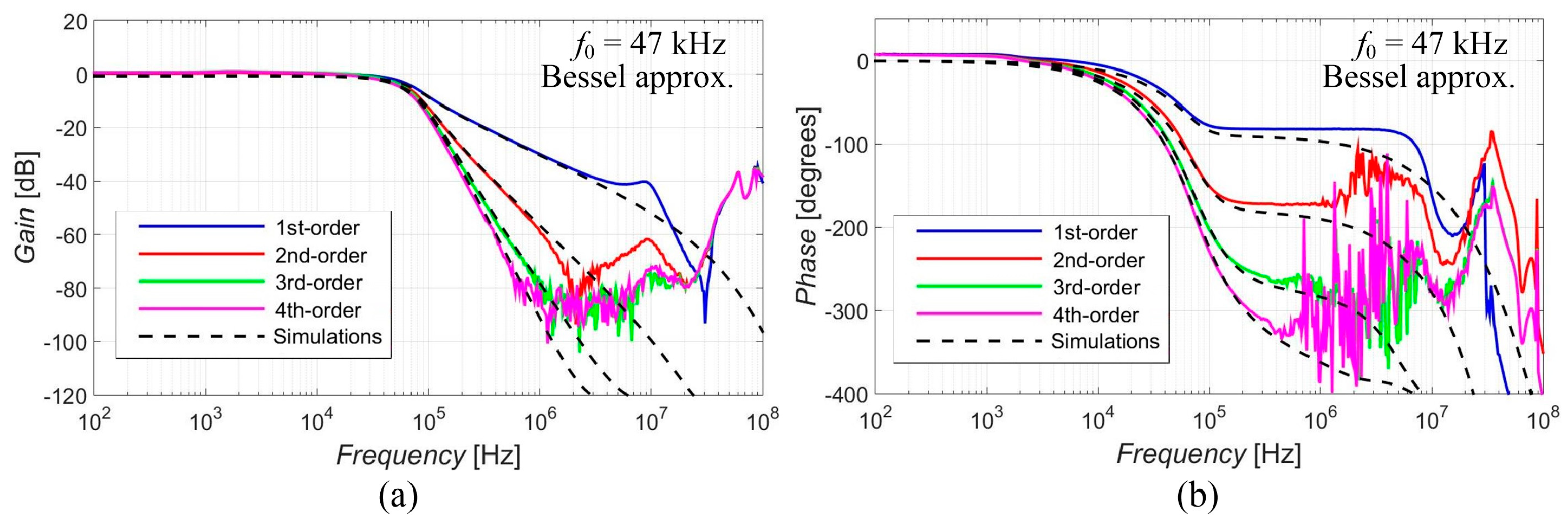
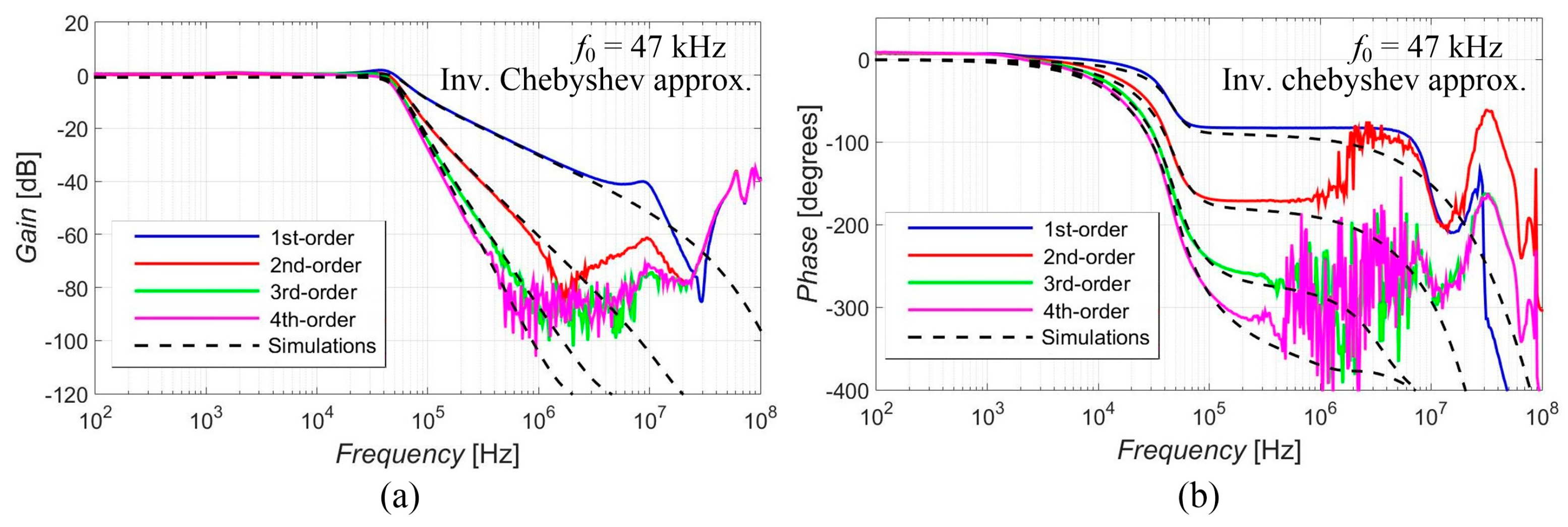
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9 show the results (simulations denoted by black dashed lines and experimental measurements presented by colored lines) of the output response of the filter for all available orders gradually with Elliptic approximation characteristics (
Figure 5), Butterworth approximation characteristics (
Figure 6), Chebyshev approximation characteristics (
Figure 7), Bessel approximation characteristics (
Figure 8) and Inverse Chebyshev approximation characteristics (
Figure 9). The results show expected features of given approximations, such as the ripple in the pass-band area, in the case of responses with Elliptic and Chebyshev approximation, the maximally flat pass-band area for Butterworth, Bessel and Inverse Chebyshev approximations, a less steep transition between the pass-band and stop-band area in case of Bessel approximation, etc. The differences between the simulation results and the experimental results (applies for all presented data in the paper) were mainly caused by the parasitic/real characteristics of used active elements.
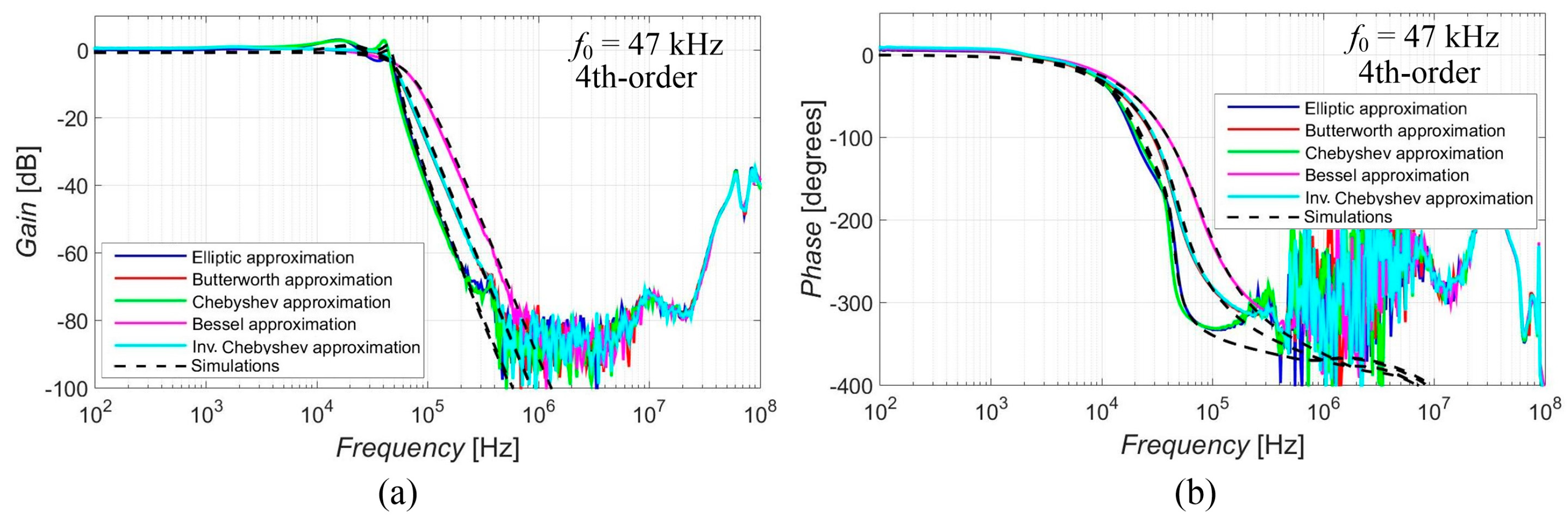
The magnitude and phase characteristics (simulations denoted by black dashed lines and experimental measurements presented by colored lines) of the 4th-order (as the highest order responses available in case of the proposal—the best example) output response are shown in
Figure 10, for a more direct comparison of the resulting steepness depending on the used approximation. It is evident that the responses with Elliptic and Chebyshev approximation characteristics had a greater steepness of their transition slopes, the Butterworth and Inverse Chebyshev approximations provided average steepness, and the smallest steepness of the magnitude response was obtained for Bessel approximation. The results prove the intended feature of the reconnection-less reconfiguration of the used approximation (electronic change in approximation). We can choose a better fitting slope of the response based on the selected approximation if this characteristic is important for our needs. The pole frequency for each approximation can be compared in
Table 4. The pole frequency slightly varied from 42.9 kHz to 49.6 kHz in the cases of the simulations and 43.8 kHz to 47.2 kHz in the case of the measurement. The pole frequency of Bessel approximation was at lower value in comparison to other approximations and Elliptic approximation was at a higher frequency in comparison to other approximations. The transfer in the stop band
KS at the stop-band frequency
fS (which was specified to be 470 kHz during the obtainment of the coefficients of the transfer function) can be compared in
Table 5. The Elliptic and Chebyshev approximations showed the highest attenuation at this frequency. The smallest attenuation was obtained in the case of Bessel approximation. In order to highlight the faster/slower transition between the pass-band and stop-band area, the frequency of the attenuation reaching −60 dB (when considering the stop band to be for the signal being 1000 times smaller) is summarized in
Table 6. Chebyshev and Elliptic approximation reached this attenuation earlier (at frequency around 175 kHz). They were followed by Butterworth and Inv. The Chebyshev approximation (around 265 kHz) and Bessel approximation did not reach this attenuation until 390 kHz.
Table 7 provides the information about the ripple (its peak value) in the pass band. There was no ripple in the case of the Butterworth, Bessel and Inv. Chebyshev approximations. Elliptic and Chebyshev approximations showed similar peak values of their ripples, with the ripple being more evident in the case of the measurement.
5. Filter Utilization
The filter has to be able to process different types of signals from simple shapes to more complex ones. In this case, various approximations can be found more suitable for specific types of signals. Therefore, in order to point out a beneficial feature of the electronic change in the approximation, the following situation is considered: the proposed filter will be tested for two types of processed input signal. The first signal is of a simple shape (sine–wave signal with a low number of spectral components (if slightly distorted/not ideal)), in comparison to the second signal, having more complex shape (ramp signal consisting of multiples and combinations of spectral components). Furthermore, the processed (useful) signal is affected by noise.
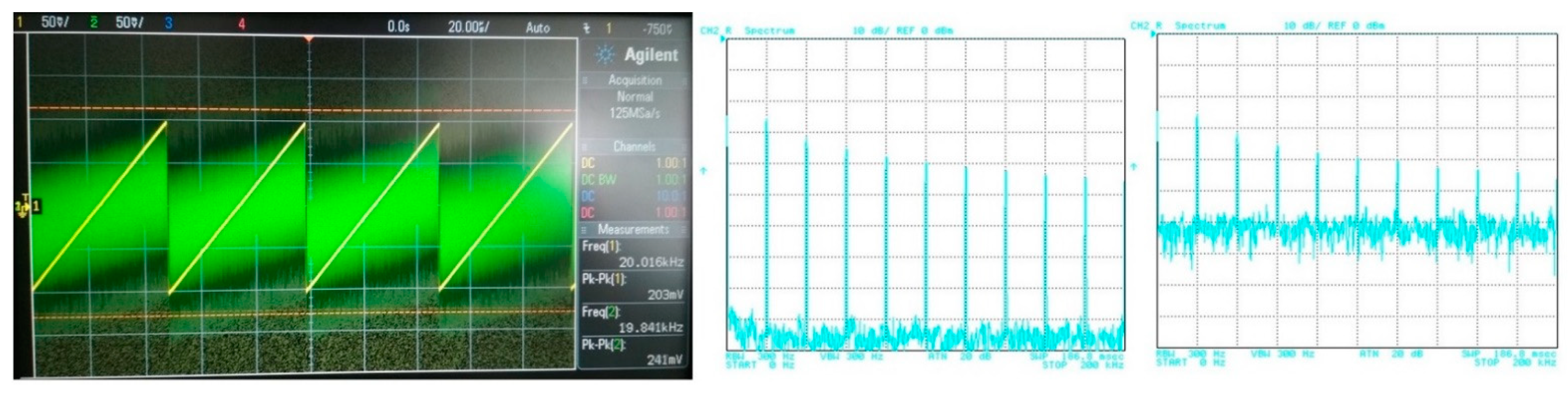
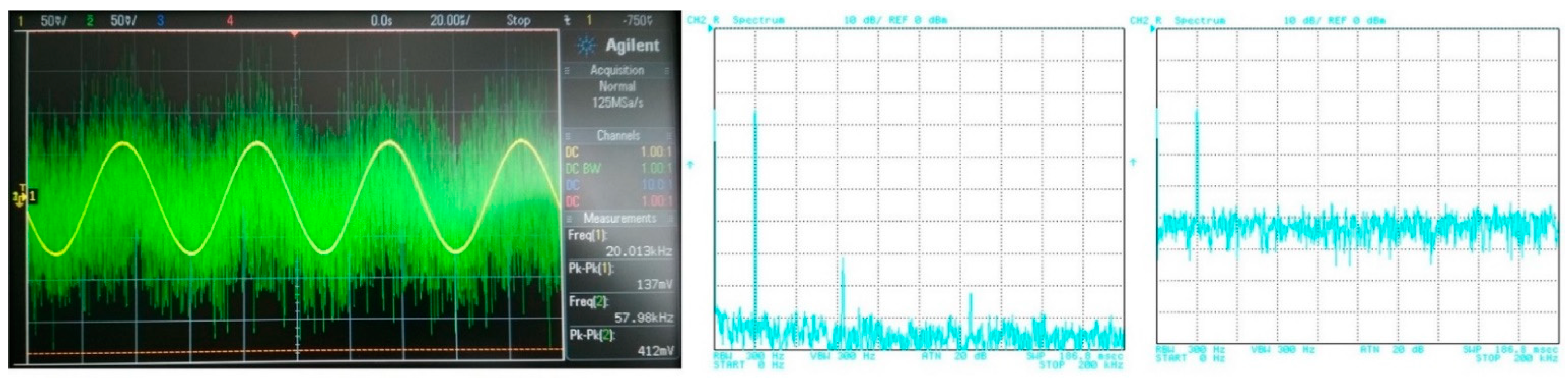
Figure 19 depicts the time-domain representation and spectrum of the ramp signal (of a frequency of 20 kHz and an amplitude equal to 200 mV peak-to-peak) together with a signal affected by noise (1 V peak-to-peak and a bandwidth of 10 MHz). The time-domain waveform and spectrum of the sine signal (of a frequency of 20 kHz and an amplitude equal to 150 mV peak-to-peak), together with a signal affected by noise (with the same parameters as in previous case), is presented in
Figure 20.
For the purposes of the demonstration, the 4th-order filtering function (
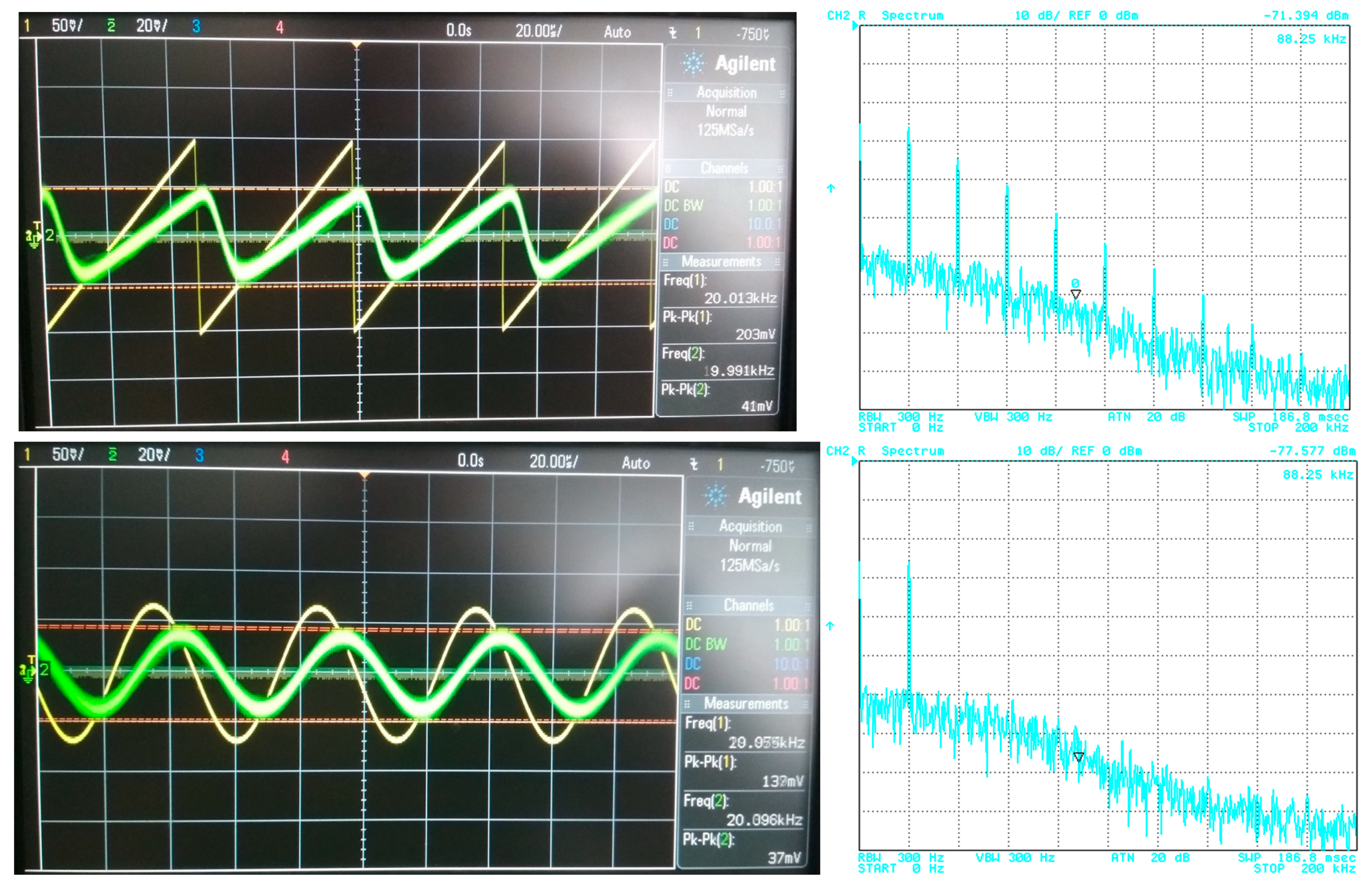
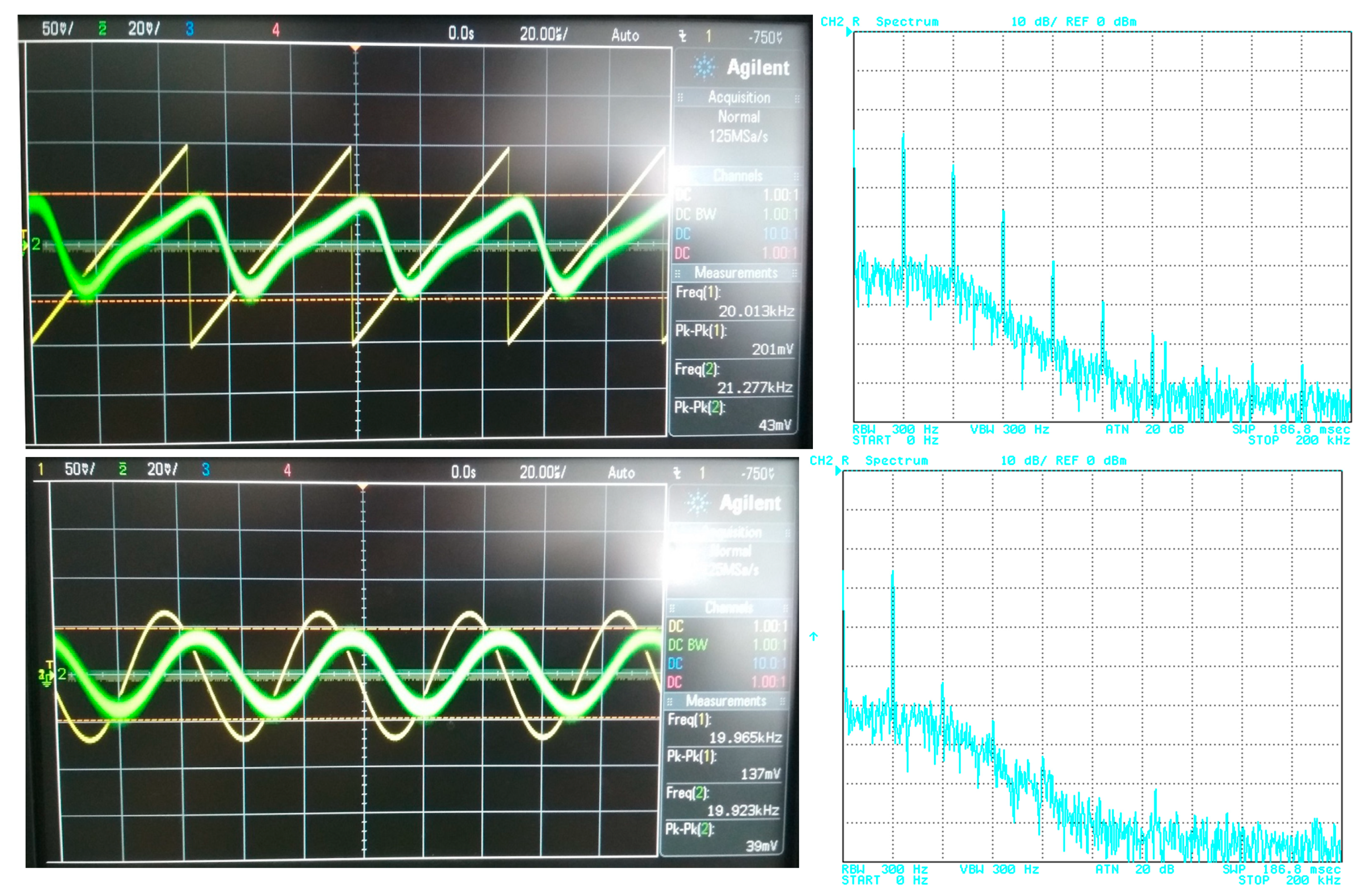
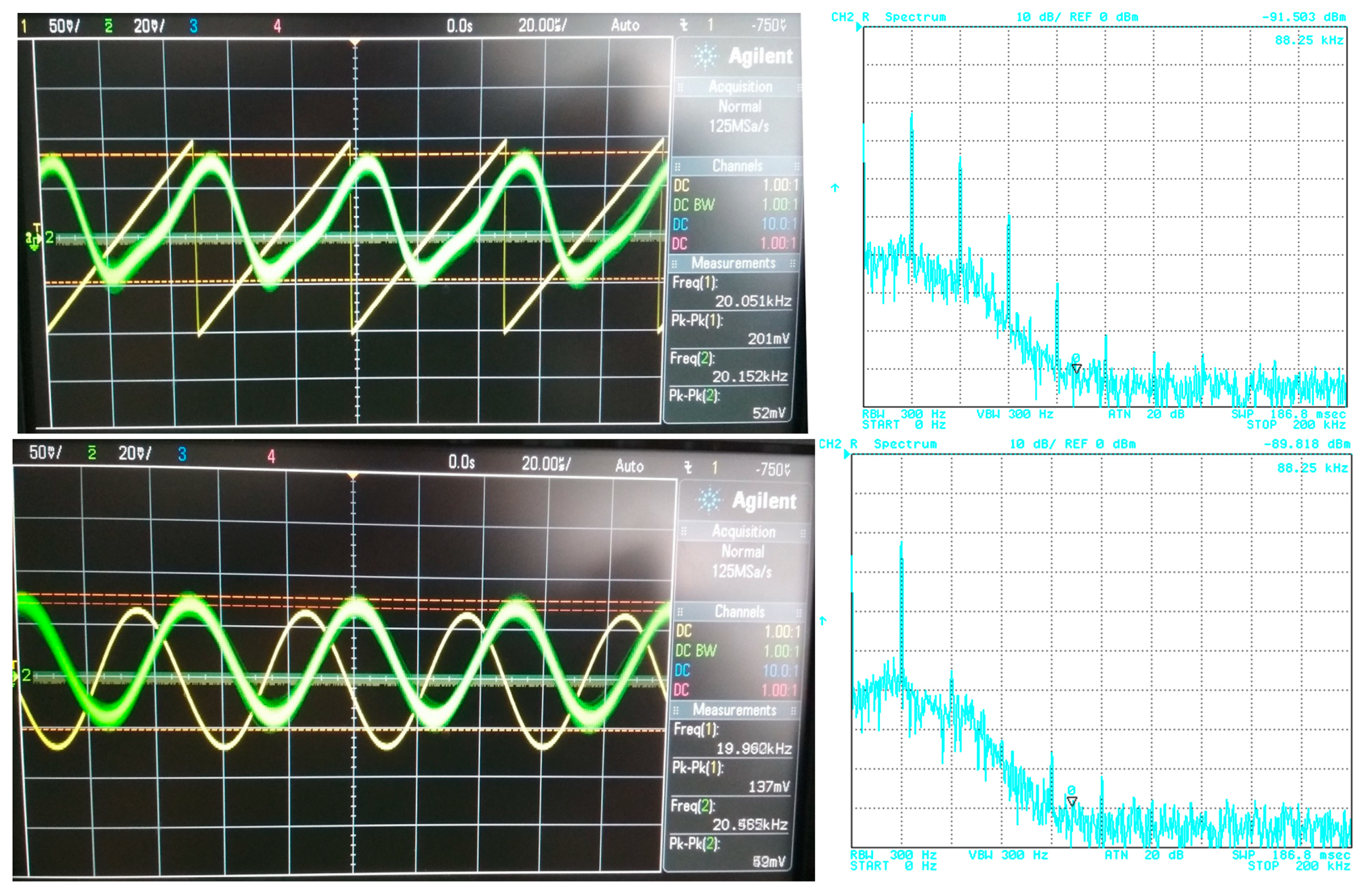
f0 = 47 kHz) was used with Bessel, Butterworth and Elliptic approximations chosen as representative examples. The transfer (attenuation) of the used V/I, I/V converters was approximately –12 dB.
Figure 21,
Figure 22 and
Figure 23 subsequently show the output (filtrated) signal and its spectrum when the electronic change in the approximation was set to Bessel, Butterworth and Elliptic approximation characteristics. When the Butterworth and Elliptic approximation was used in order to process the ramp signal, it can be seen that the filtered signal had a significant deformation of its shape. This was caused by the fact that the transition between the pass-band and stop-band area of the function with Butterworth and Elliptic approximation characteristics was steeper than for the Bessel approximation, resulting in higher spectral components of the useful signal being partially filtered out as well. Therefore, for the more complex signal (shape), we should consider approximations with a less steep transition between the pass-band and stop-band area. On the other hand, when processing a simple signal (sine waveform in this case), we can select an approximation with a steeper transition between pass-band and stop-band area for better filtration of the noise without the signal shape deformations. This could be, of course, solved by changing the order of the filter. Nonetheless, it means more additional stages of the building blocks (integrators) in a cascade when a topological modification (increasing circuit complexity if not considering the reconnection-less reconfiguration) would be necessary. Extended complexity would also mean additional power consumption as well as additional chip area. When using the electronic change in the approximation characteristics, the steepness of the function can be easily adapted for the specific type of the processed signal.
6. Conclusions
The proposed filter offers the electronic change in the approximation characteristics, reconnection-less reconfiguration of the order and the electronic adjustment of the cut-off frequency. The performance of this filter was verified through PSpice simulations and experimental measurements, proving the presence and intended function of all above-mentioned features (see
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
Figure 13 and corresponding text).
The advantages of the presented filter are the following:
The reconnection-less reconfiguration of the order (higher-order filters of different orders are usually designed as individual circuits or the solution contains electronic switches—the disadvantages of electronic switches was discussed in the introduction);
The ability to electronically change approximation characteristics;
The ability of fine tuning (adjusting the pass-band area);
The electronic adjustment of the pole frequency.
The above-mentioned features provide additional degrees of freedom for the filter and its adjustment based on the application. With these features, the filter can adapt to a changing situation and requirements such as sensors, wireless communication and cognitive radio environments, where a change in the filtering function might be necessary. Standard filtering approaches and multifunctional filters do not allow these features.
The electronic change in the approximation characteristics can be useful in order to influence the resulting behavior of the filter when searching for the optimal characteristics for intended application or based on the processed signal. Based on this fact, the proposed filter offers the possibility to choose the most fitting characteristics when focusing on a particular feature (magnitude characteristics, transient domain features, implementation requirements and limitations, etc.). For instance, the steepness of the transition between the pass-band area and stop-band area can be adjusted without having to add another integrator in a cascade, as topology modification might not be possible (in the case of on-chip implementation). As another example, the approximation with smaller overshots of the step response can be used for applications which are more sensitive when it comes to their stability. All this can be achieved from one topology that offers the electronic adjustment of its approximation characteristics, which can be more freely adjusted for particular needs of a given application, or that can be adjusted anytime during the lifespan if the parameters of the application change or deteriorate. Another possible use of this ability to change the approximation characteristics of the filter could be served in case of sensors, where the conditions for the signal change often and the ability to change the approximation characteristics can be used depending on the current situation in order to decrease the noise in the processed signal. Particular benefits of the electronic change in the approximation characteristics were discussed and an example was presented (see
Figure 21,
Figure 22 and
Figure 23).



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}