





Research on the Prediction Model of Engine Output Torque and Real-Time Estimation of the Road Rolling Resistance Coefficient in Tracked Vehicles

Abstract
:1. Introduction
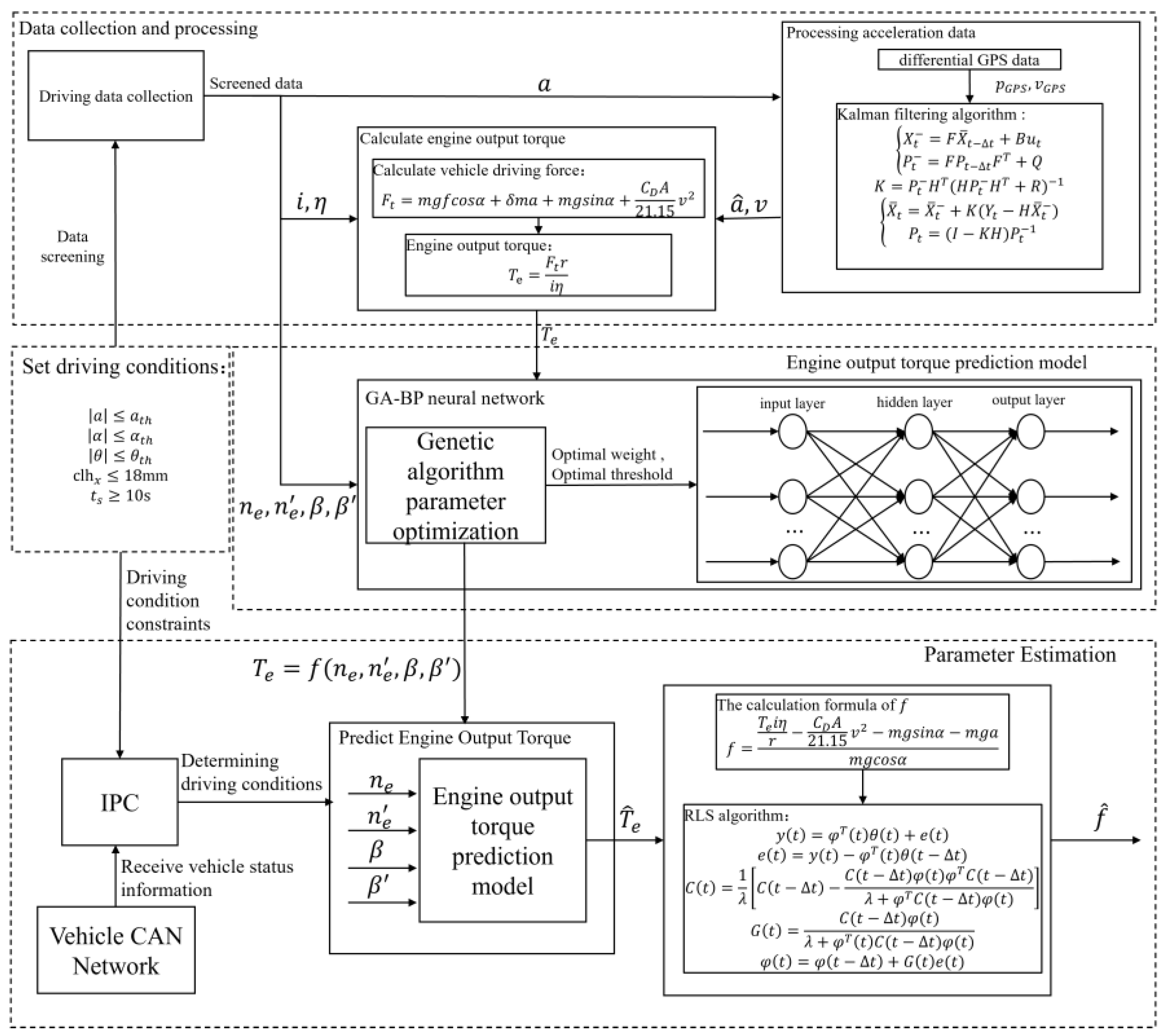
2. Estimation of Based on Recursive Least Squares (RLS) Algorithm
- (1)
- The system output is measured, and the regression vector is calculated.
- (2)
- The difference between the actual output of the system at time and the output of the prediction model obtained by estimating the parameters is calculated. is the time interval. The difference can be expressed as follows:
- (3)
- The updated gain vector and the covariance matrix are calculated. These can be expressed as follows:
- (4)
- The parameter estimation vector is updated as follows:
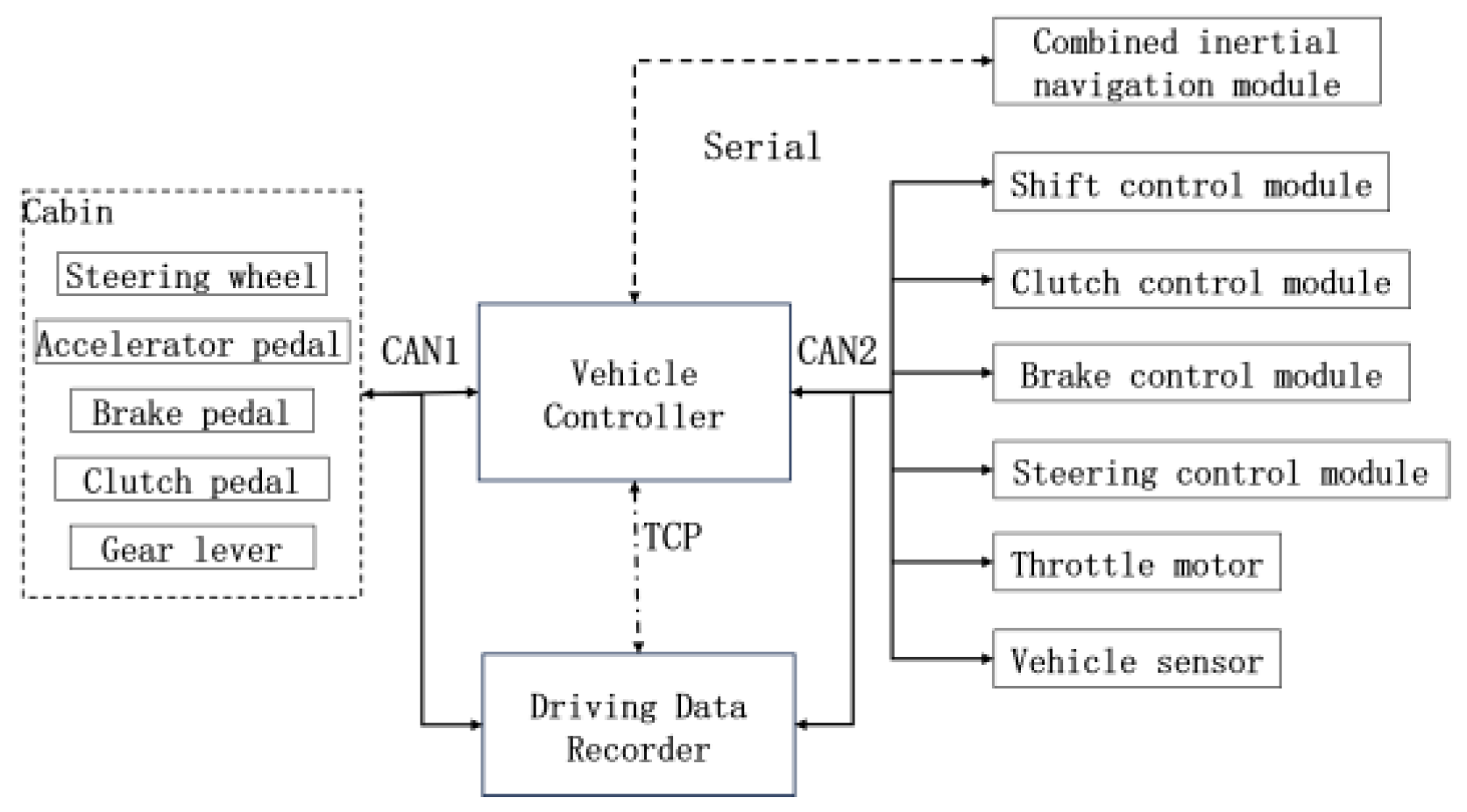
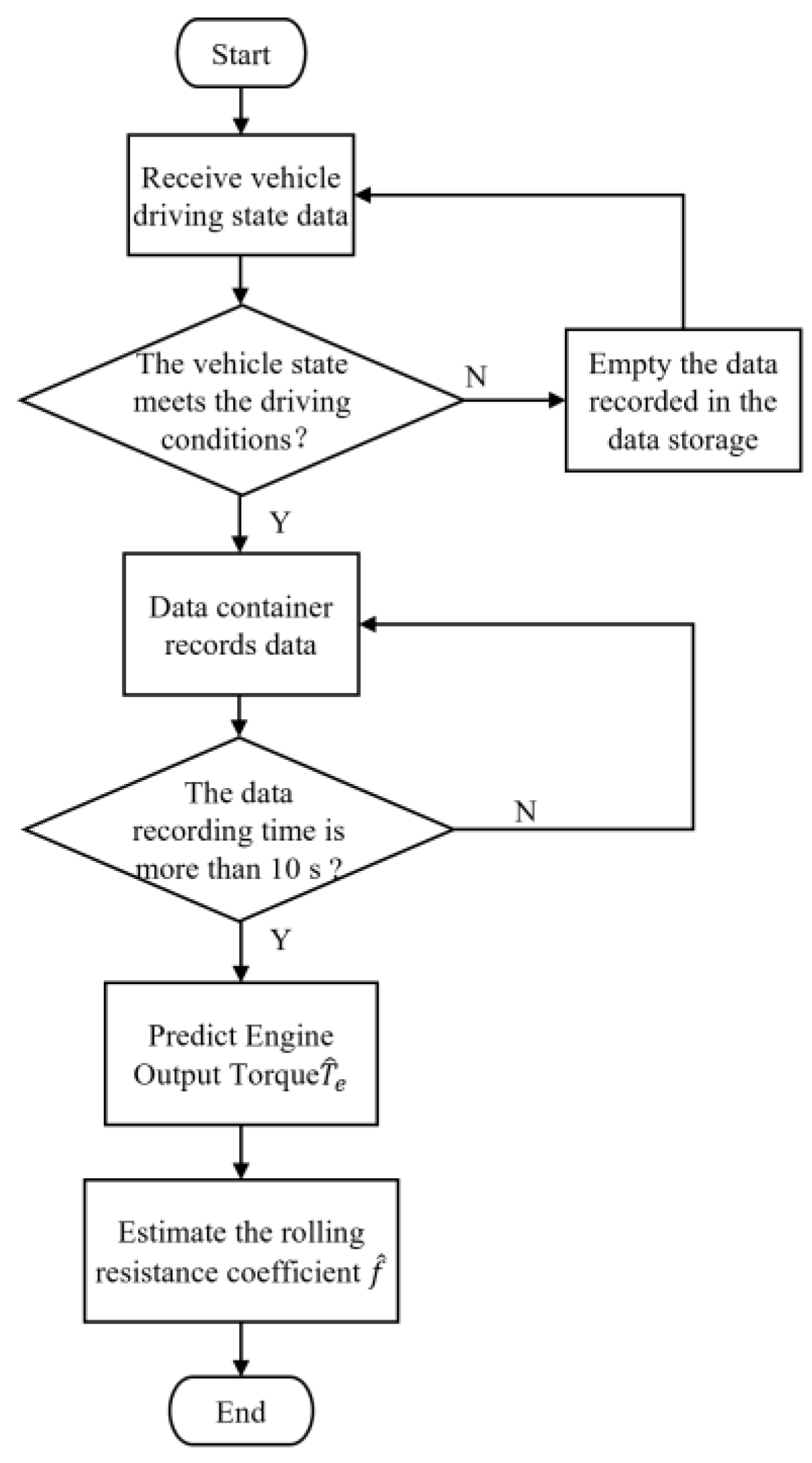
3. Tracked Vehicle Driving Data Acquisition and Processing
- (1)
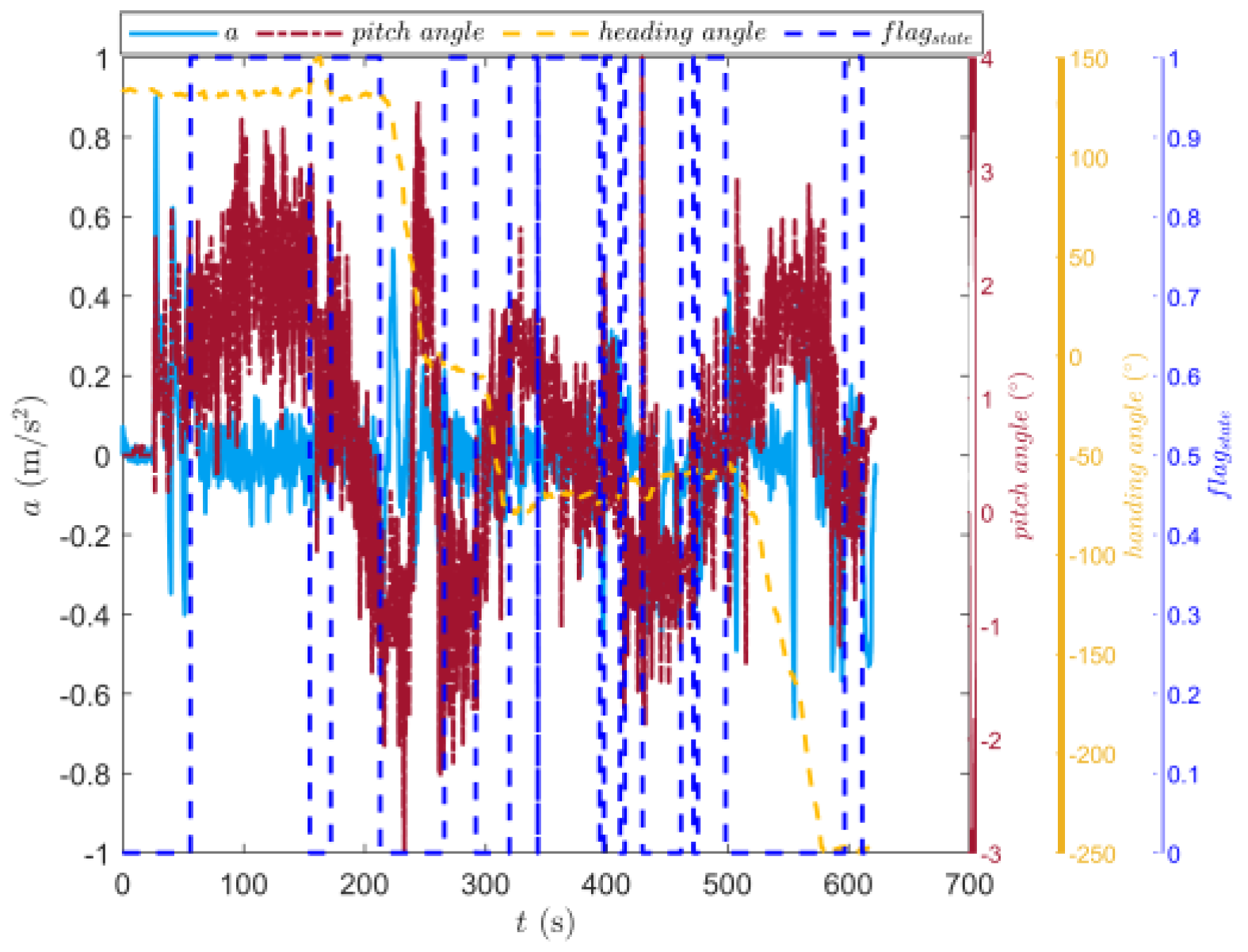
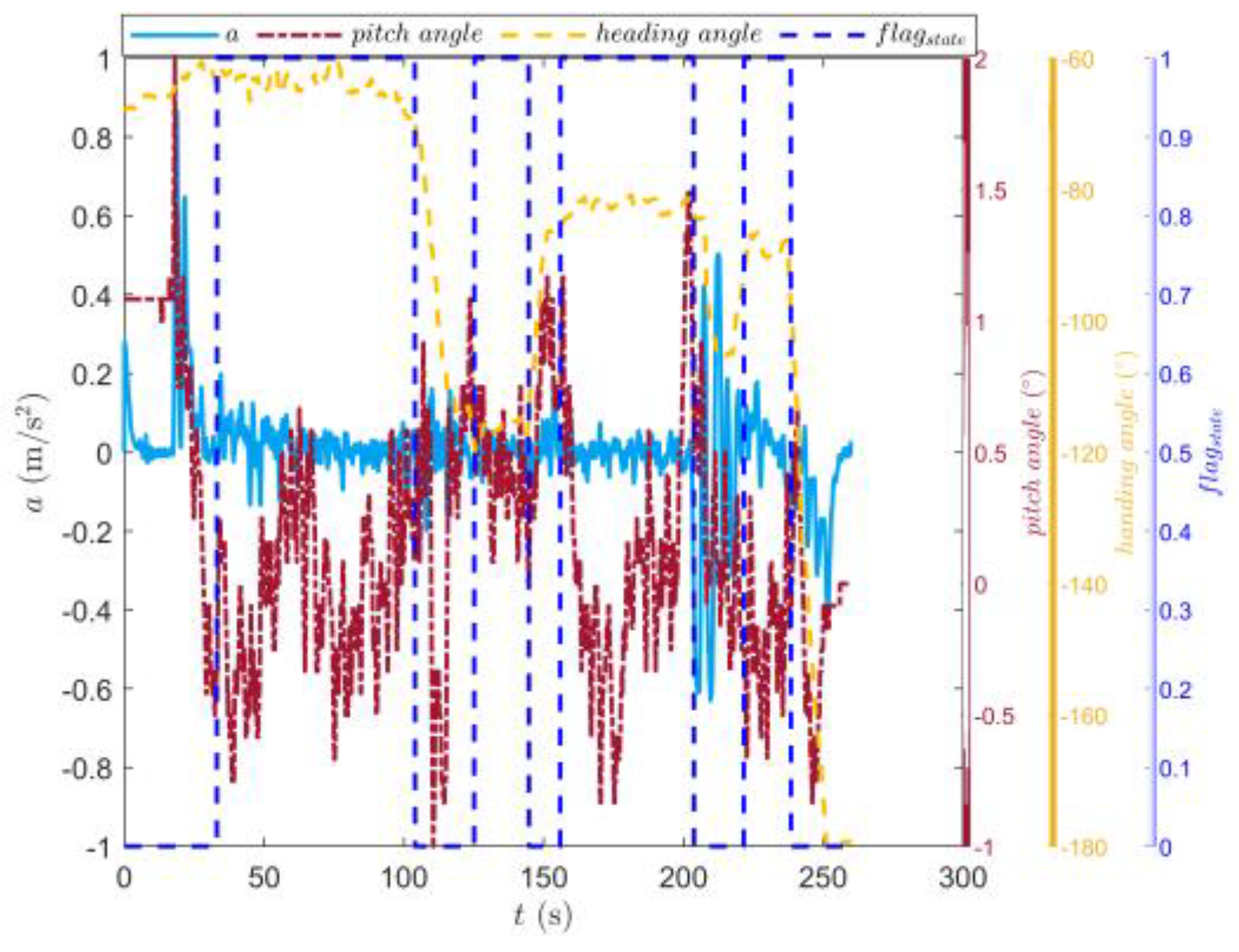
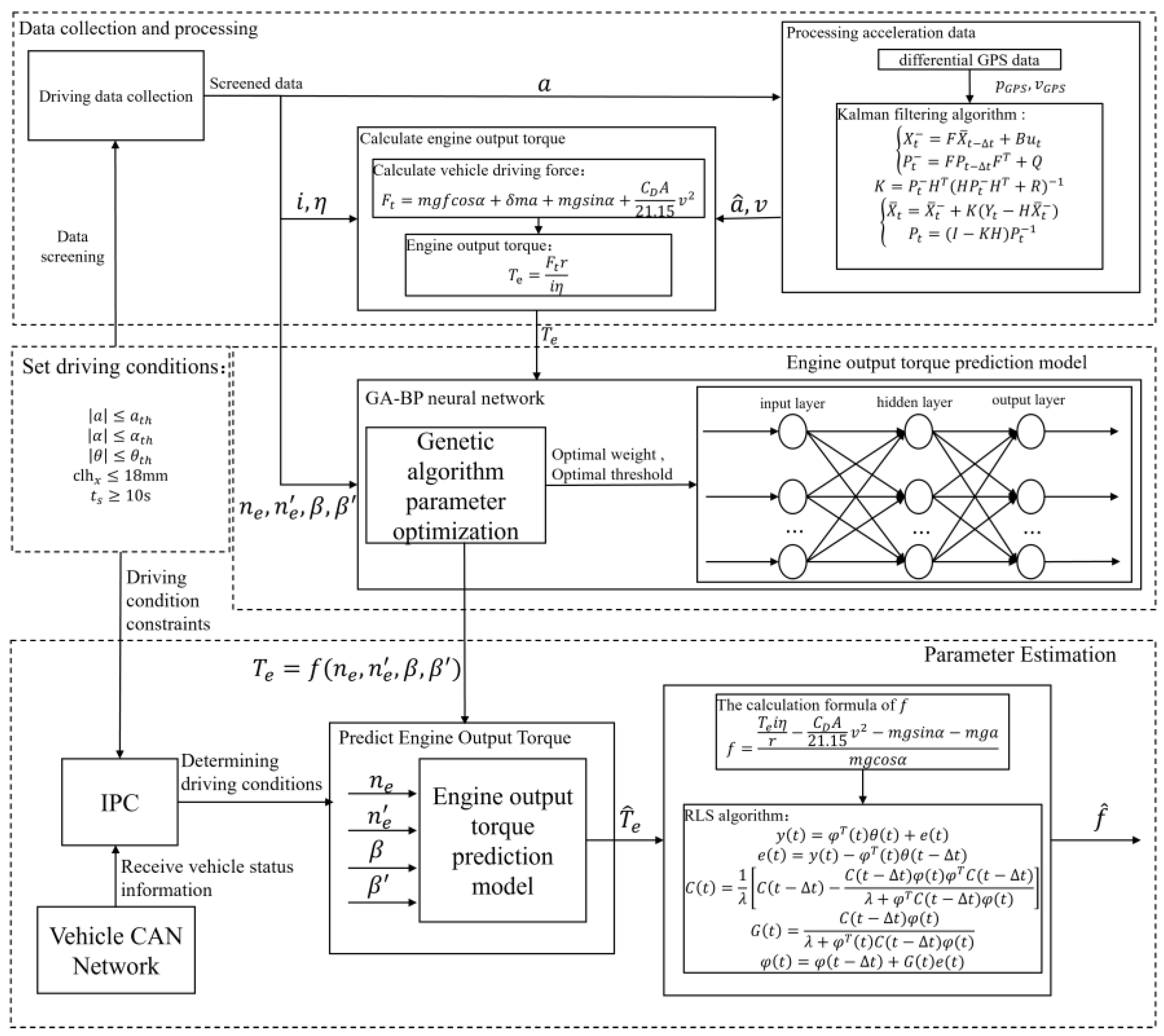
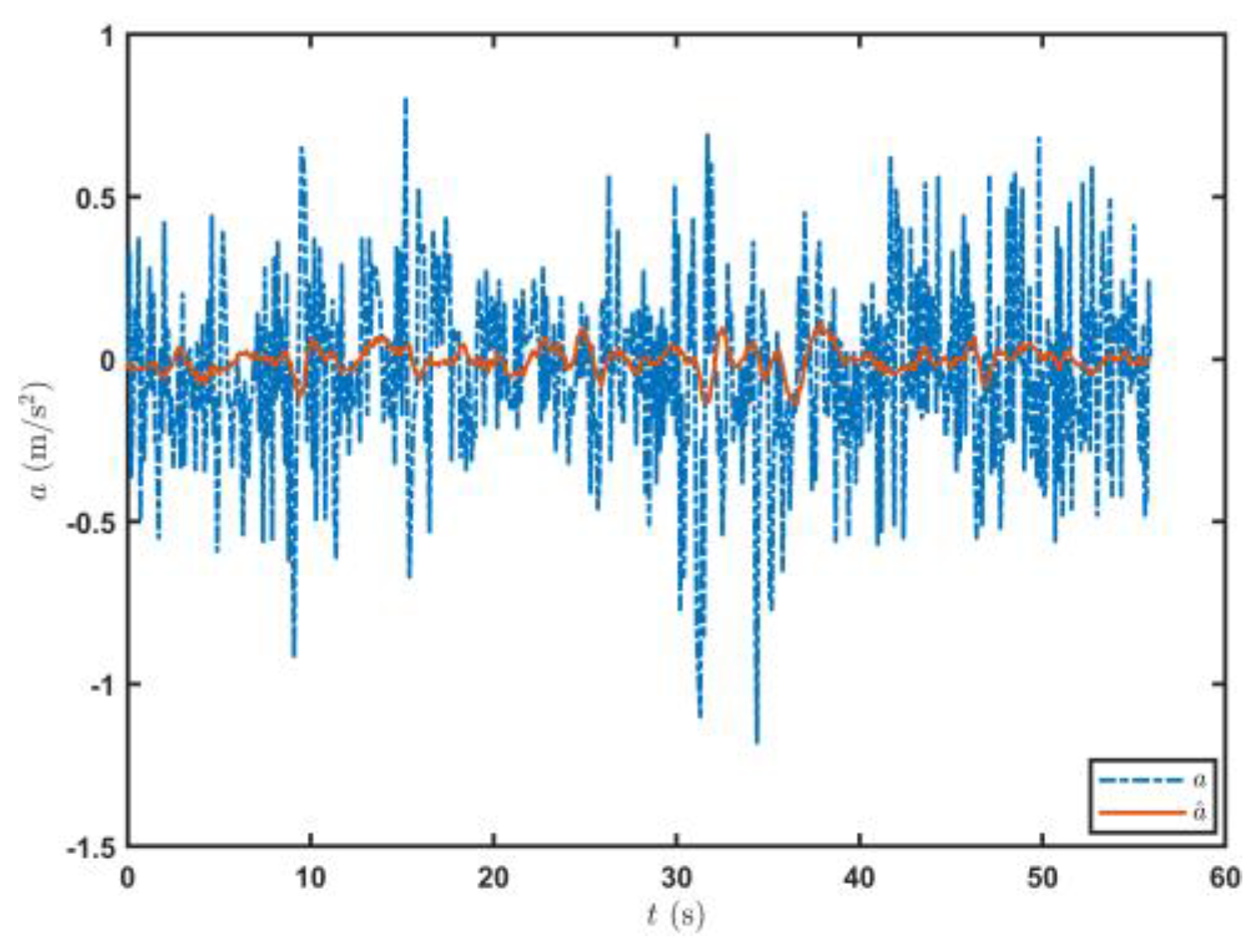
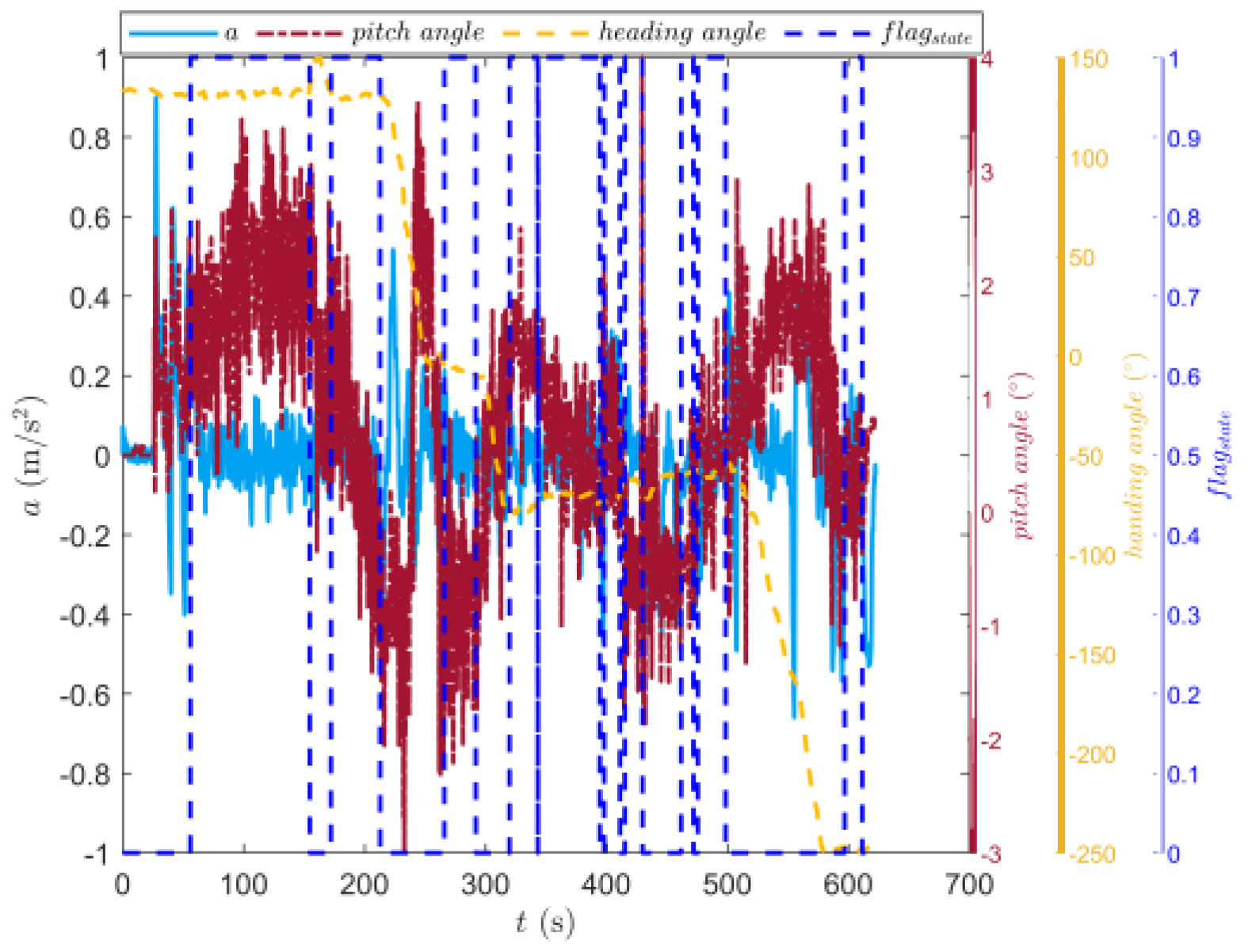
- The measurement of the vehicle pitch angle by the gyroscope was affected not only by the road slope but also by installation error, the suspension state, and other factors. Under some conditions, for example, the clutch was engaged too fast when shifting, which caused the vehicle to pitch in a short time even if it was driving on a flat road, resulting in measurement errors. At the same time, a large change in the road slope also increased the measurement error of the acceleration sensor. To improve the prediction accuracy of the model, the driving data with a large angle measured by the gyroscope were eliminated by setting the ramp threshold to , so that the tracked vehicle could drive on a flat road, which was approximately level, as far as possible.
- (2)
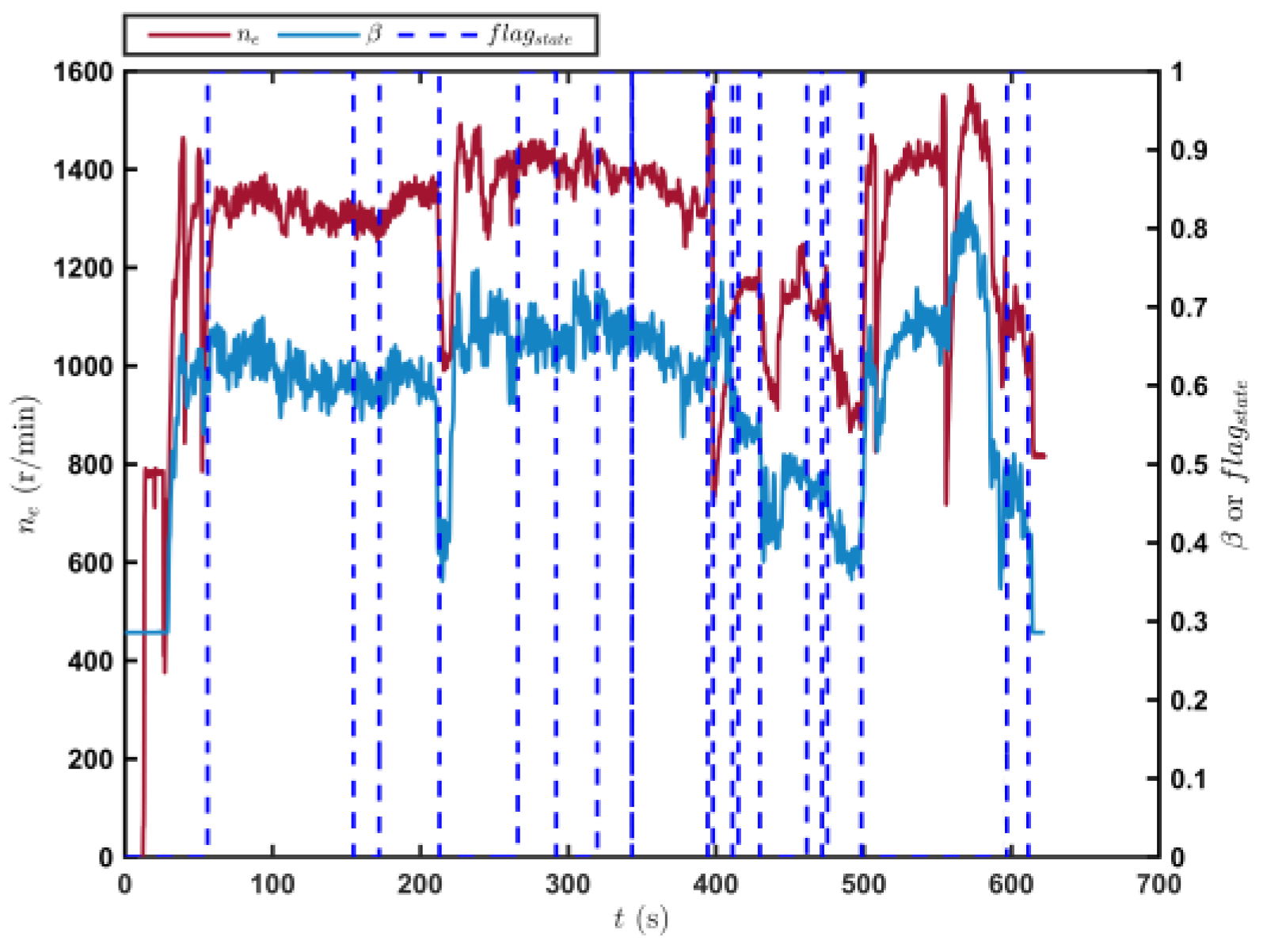
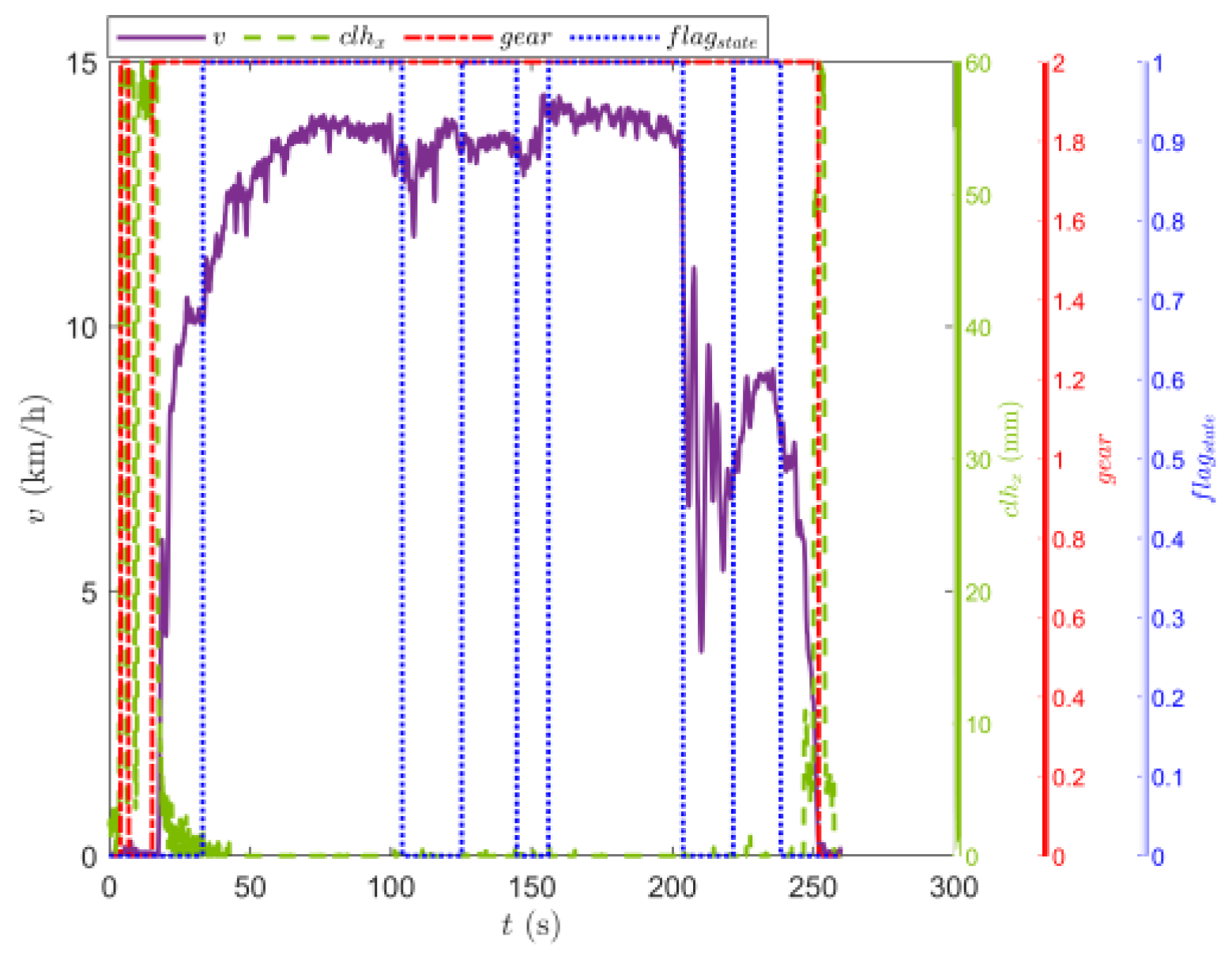
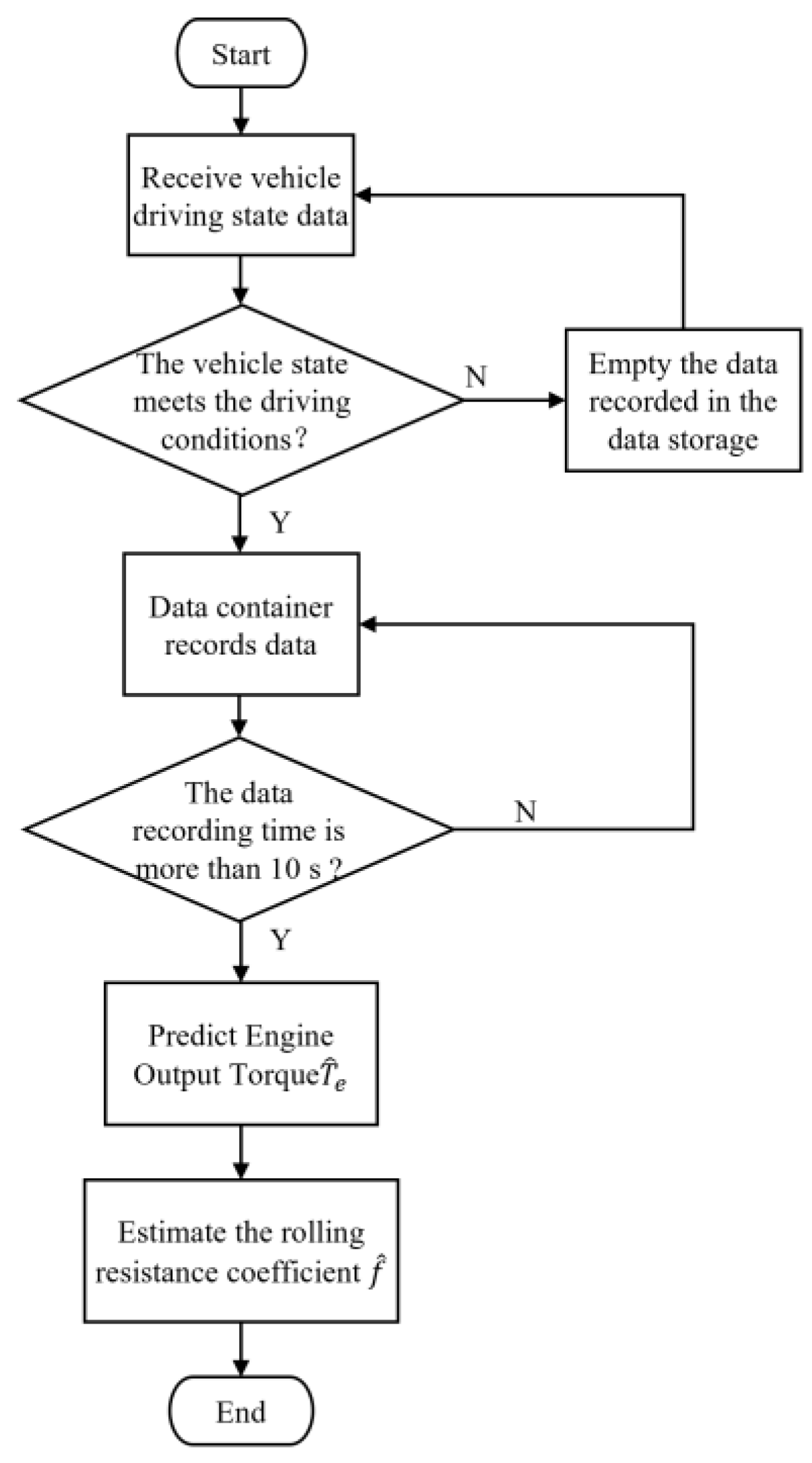
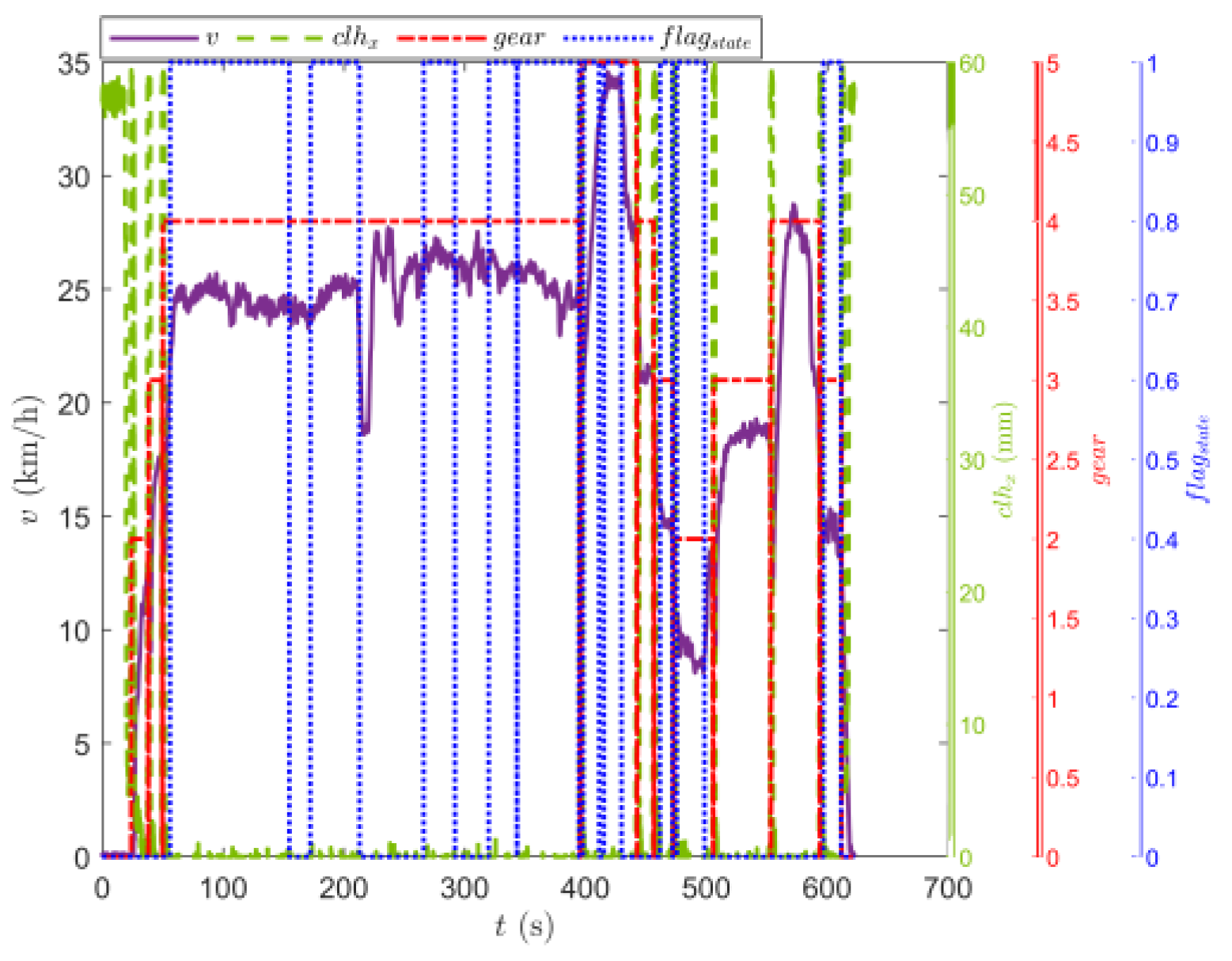
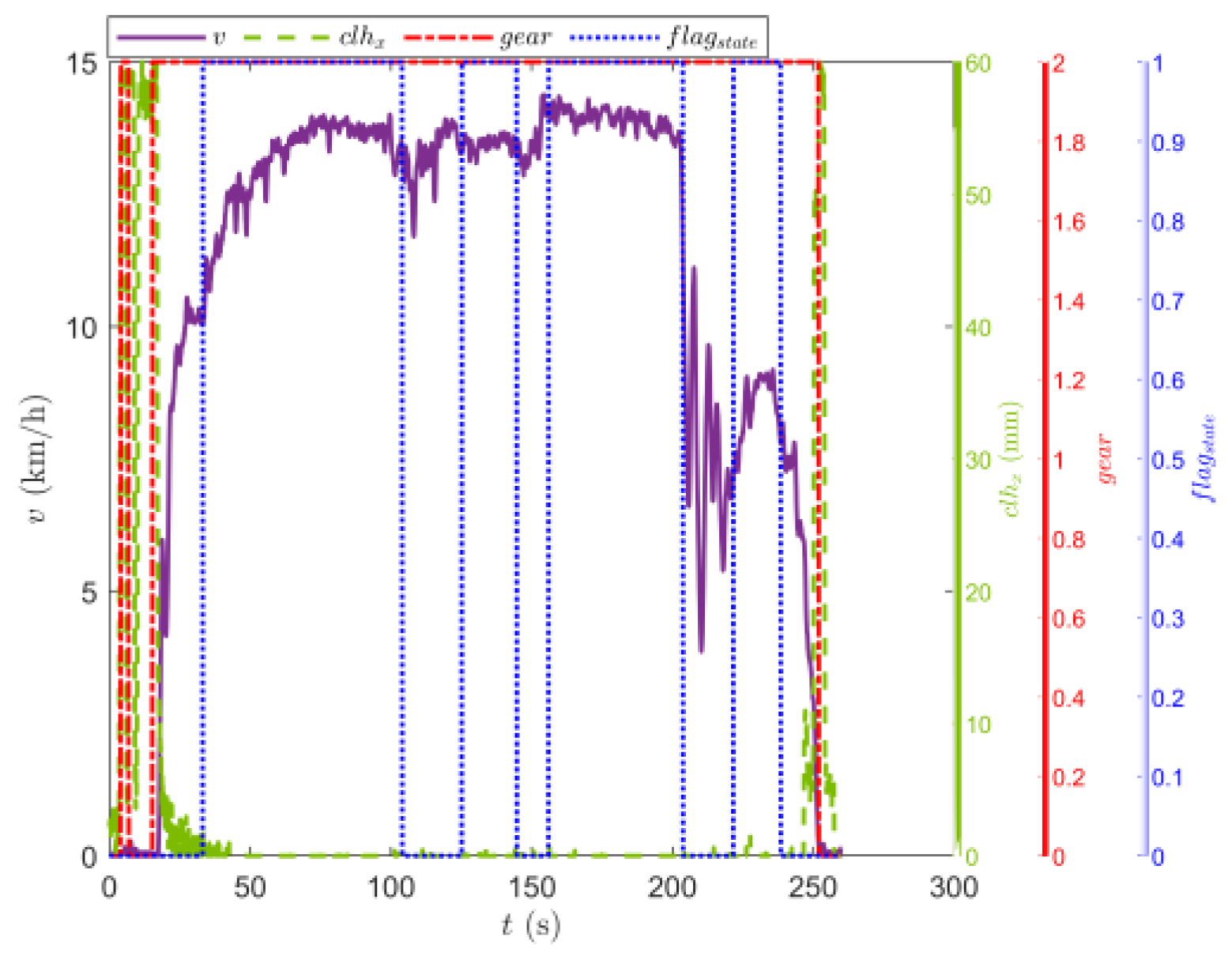
- The selected vehicle driving data did not include the clutch separation process, and the driving force during the vehicle driving process was only provided by the engine. The engagement and separation state of the clutch was judged by the displacement of the clutch control cylinder . When the clutch combination displacement , the clutch was considered engaged. Setting the vehicle acceleration threshold and the minimum stable driving time threshold ensured that the stable driving data were screened after the vehicle shift was complete. By analyzing the driving data, we set and . The driving data when the vehicle acceleration for more than 10 s after the clutch was engaged was considered stable and valid data.
- (3)
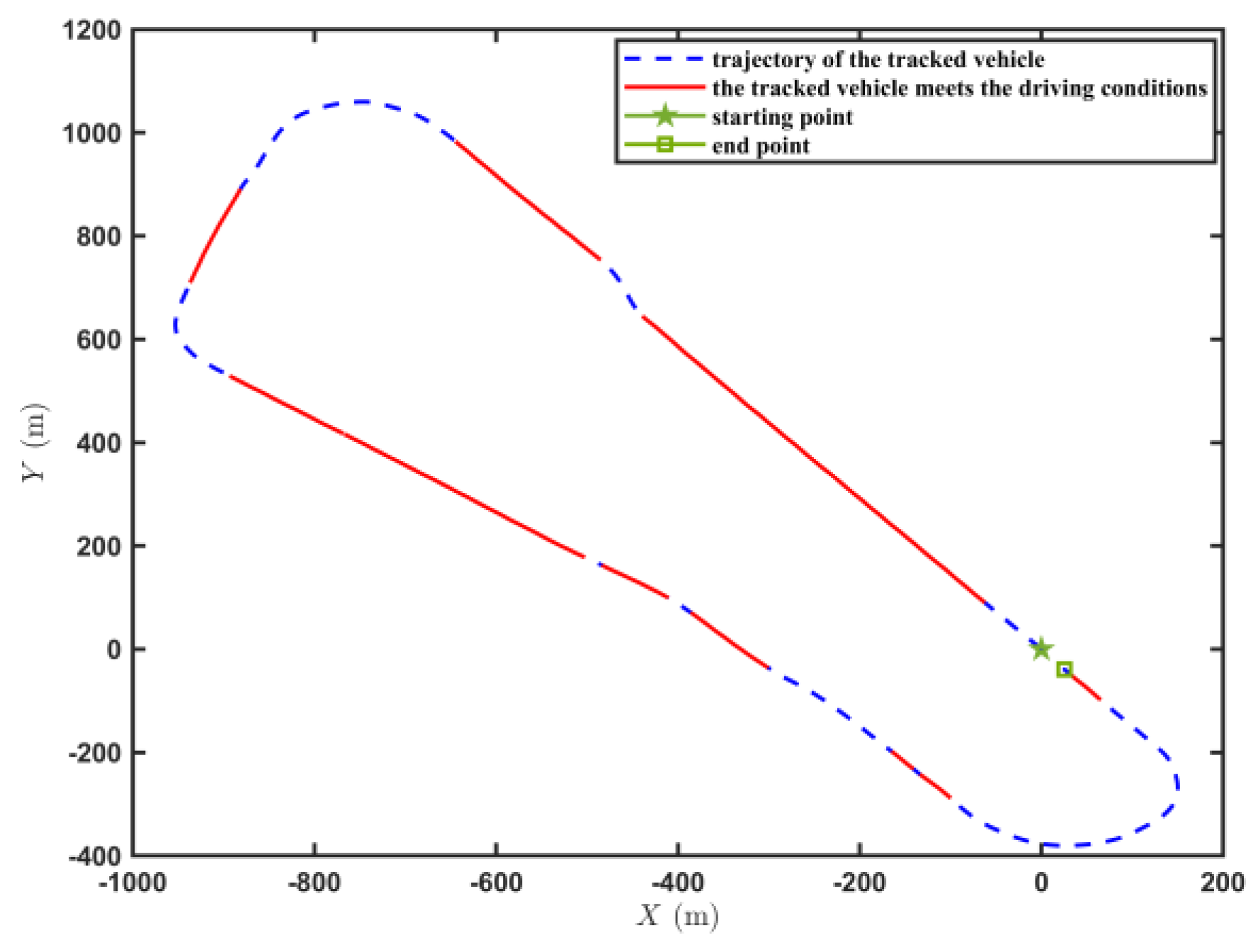
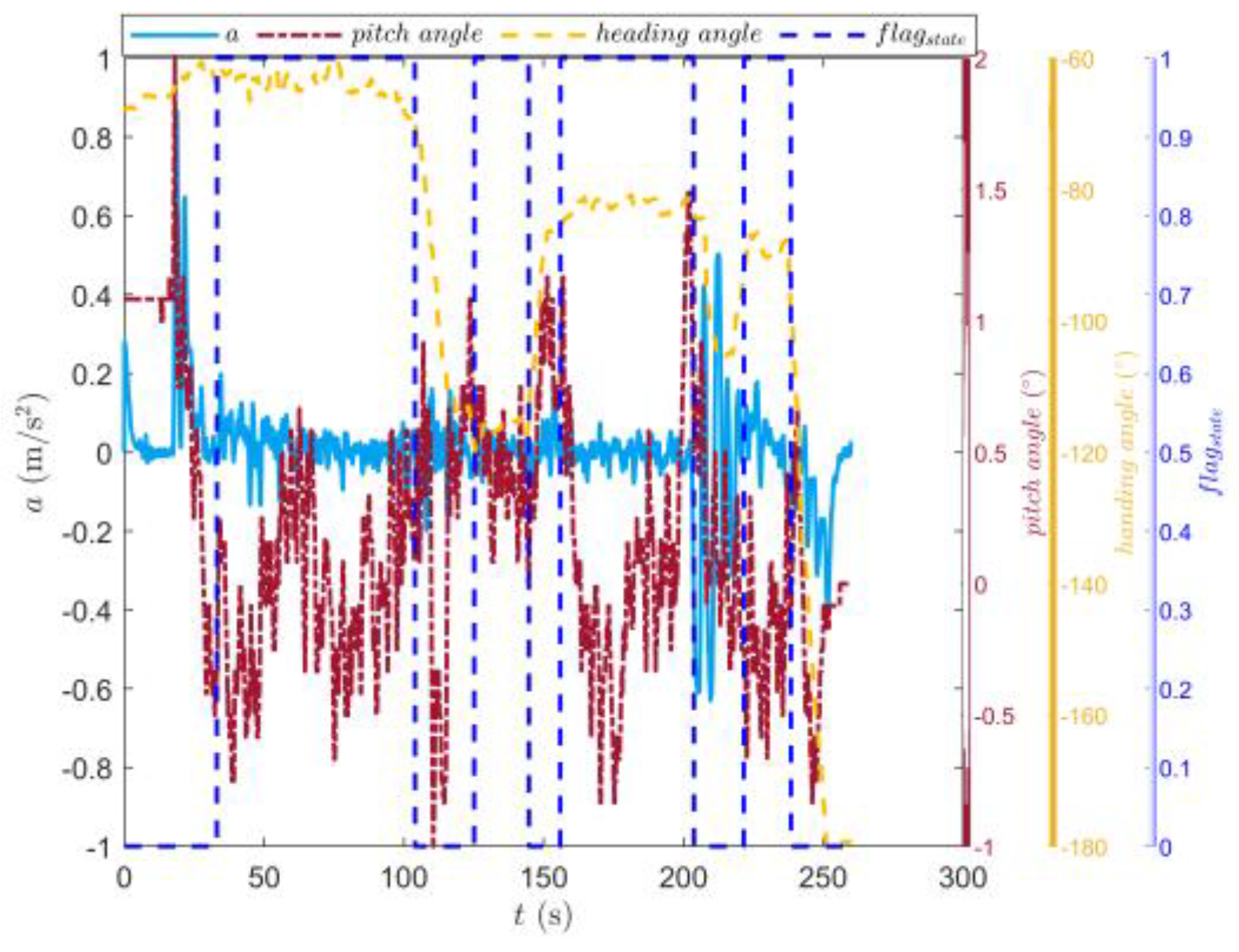
- It was necessary to limit the heading angle in the screened vehicle driving data to ensure that the tracked vehicle was in a straight-line driving state. Considering the influence of sensor measurement error and random road disturbances, we set . In the selected driving data, the change in the heading angle of the vehicle between the initial moment and the final moment could not exceed .
- (1)
- Update the prediction equation:
- (2)
- Update the Kalman gain coefficient:
- (3)
- Update the measurement equation:
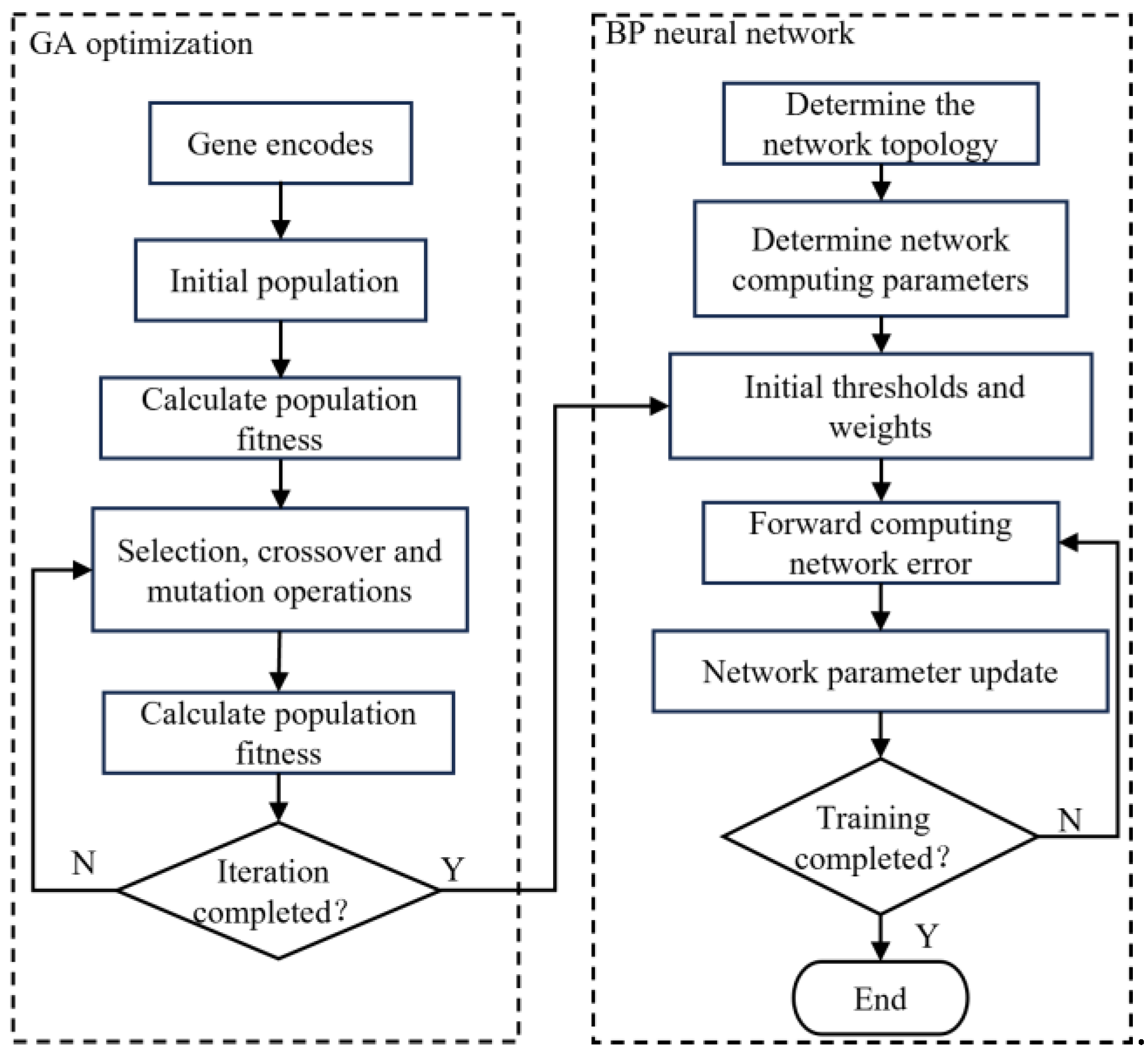
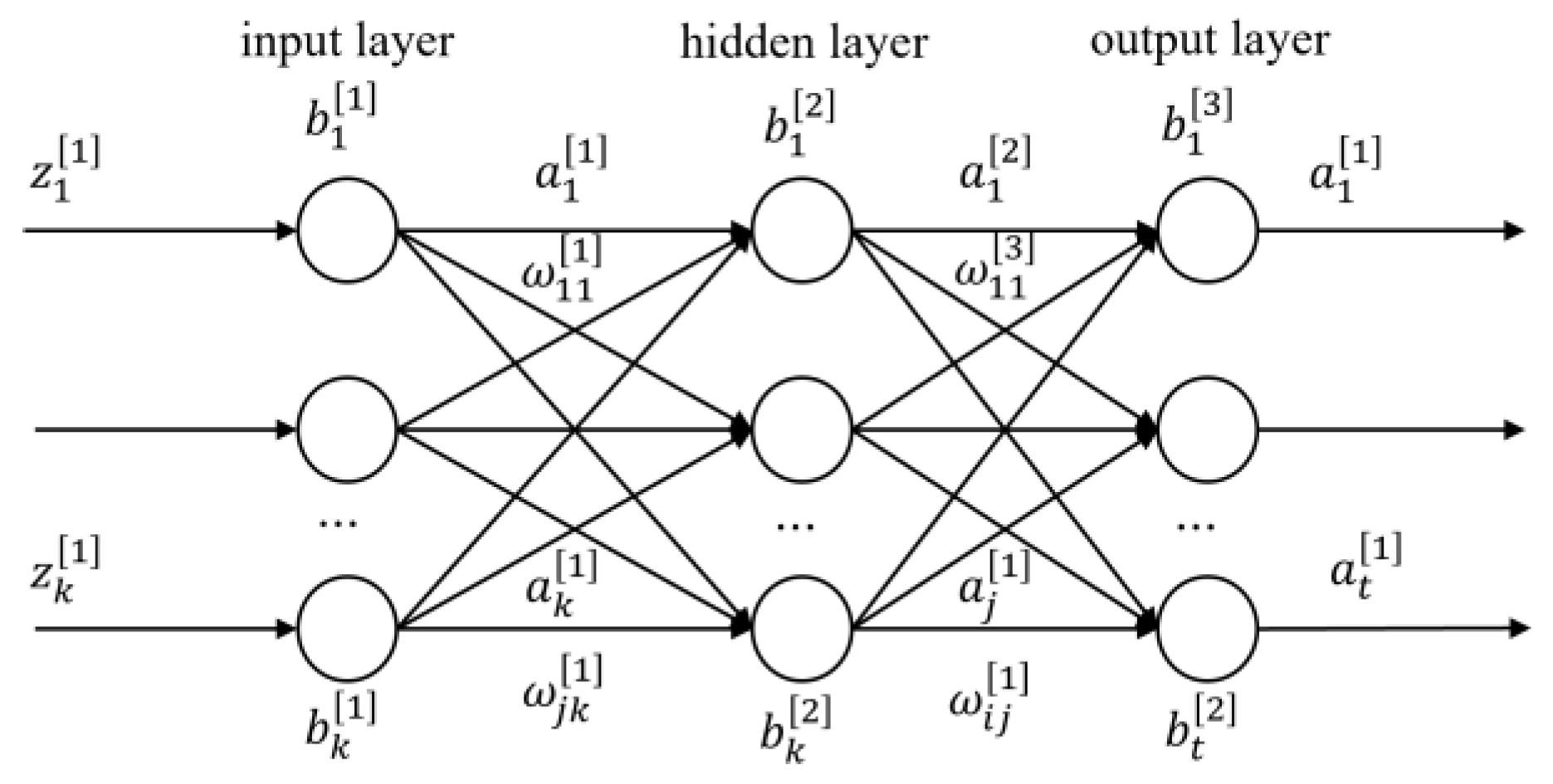
4. Engine Output Torque Prediction Model
5. Experimental Results and Analysis
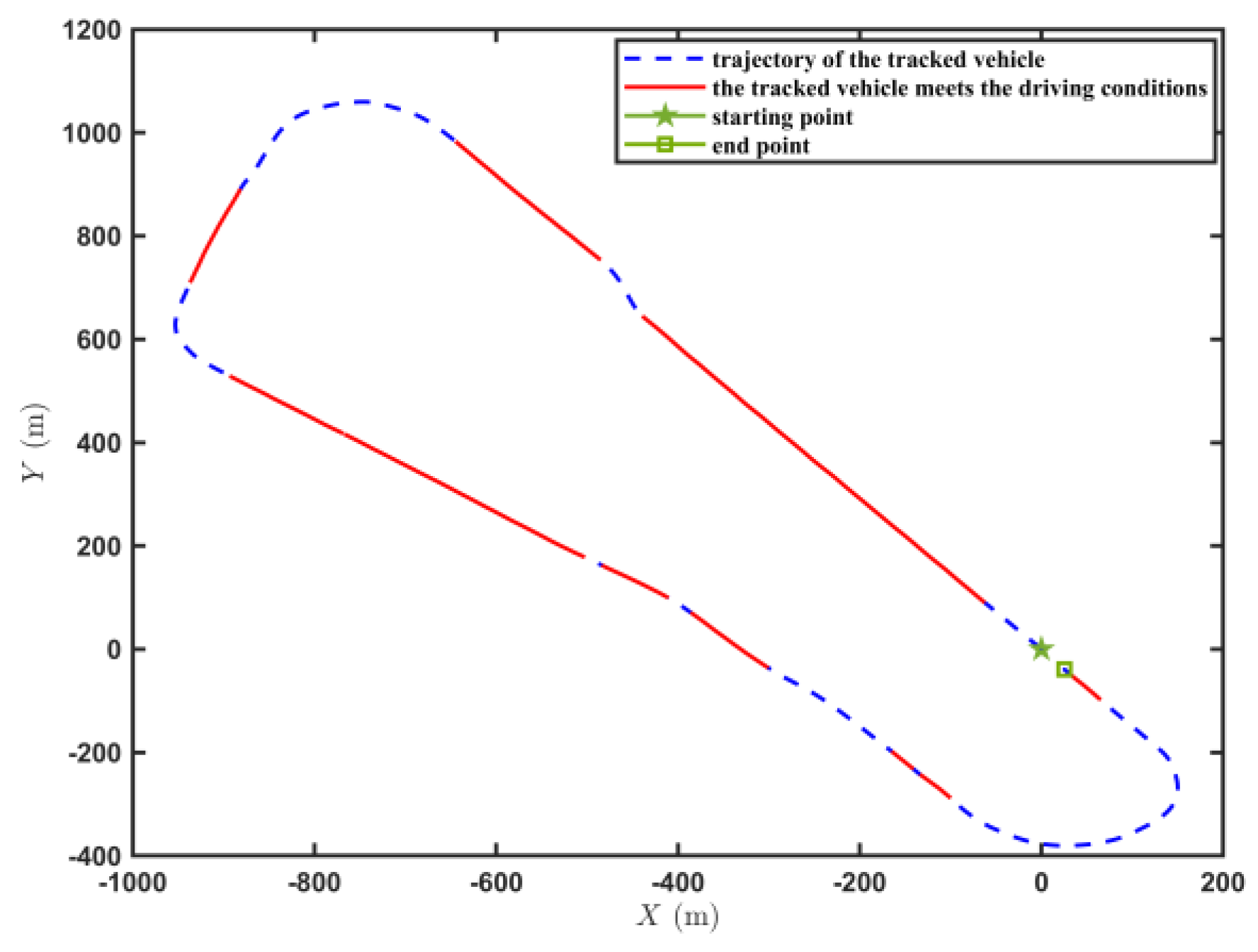
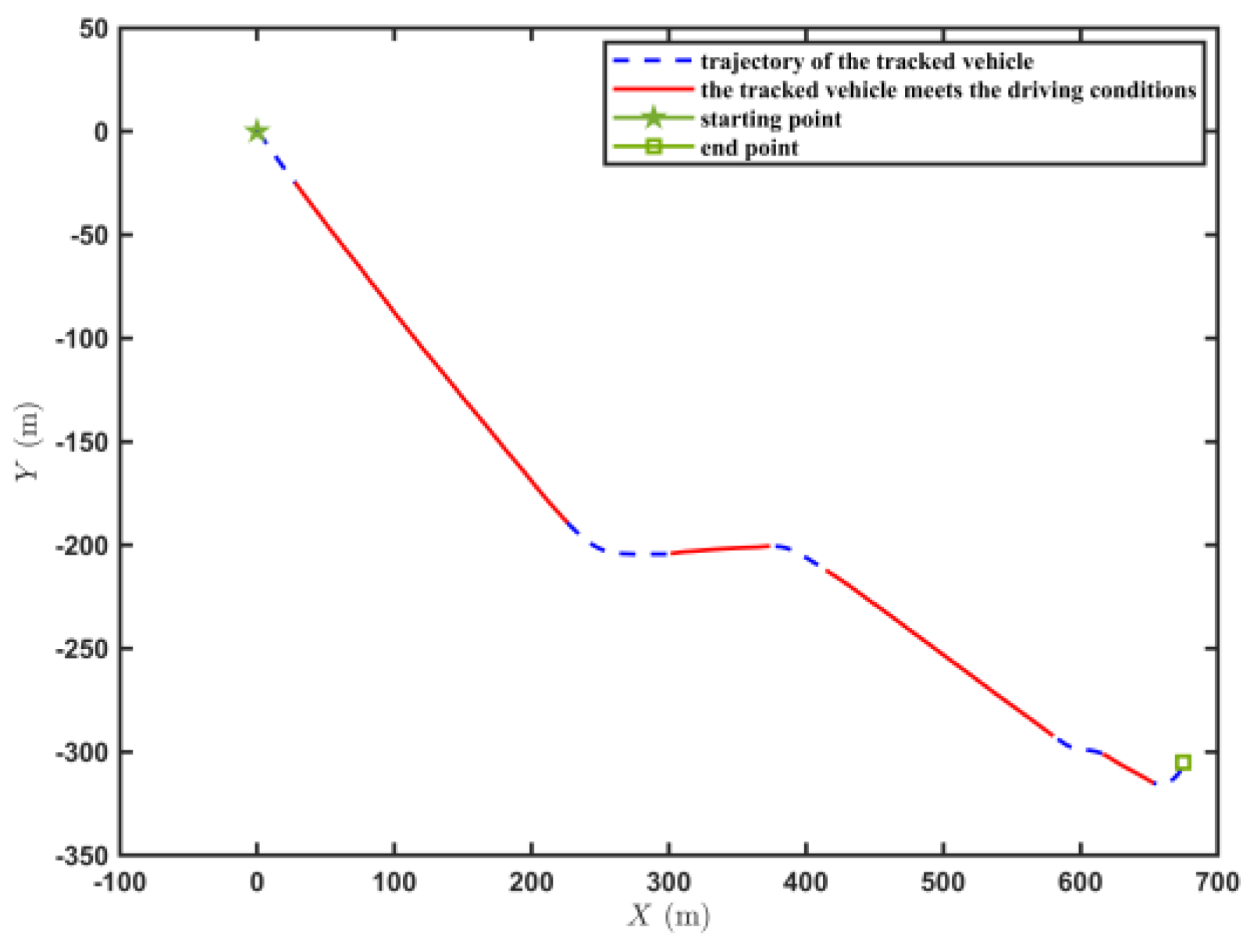
5.1. Estimation of for Tracked Vehicles Driving on a Sand Road
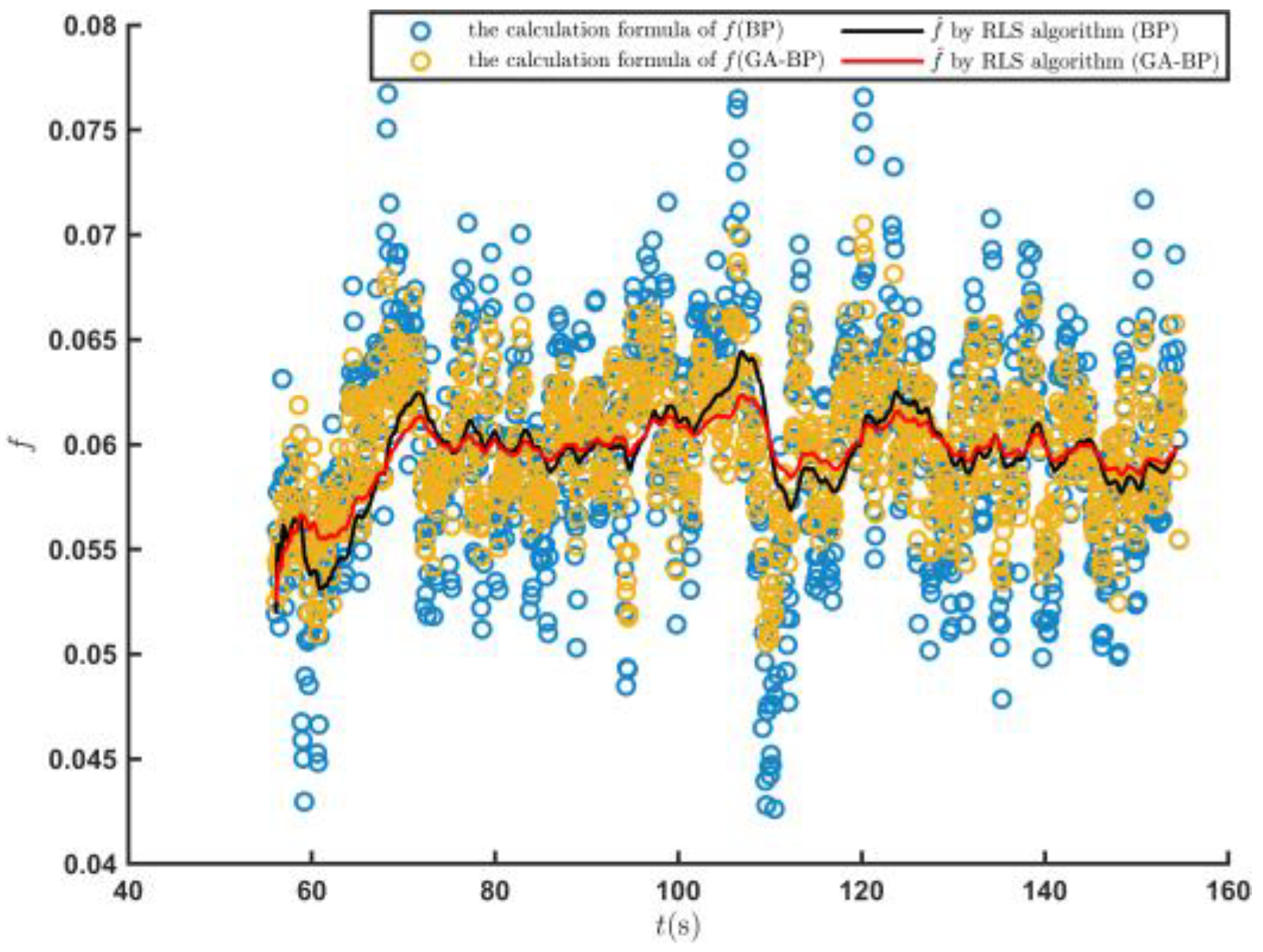
5.2. Estimation of for Tracked Vehicles Running on a Cement Road
6. Conclusions
- (1)
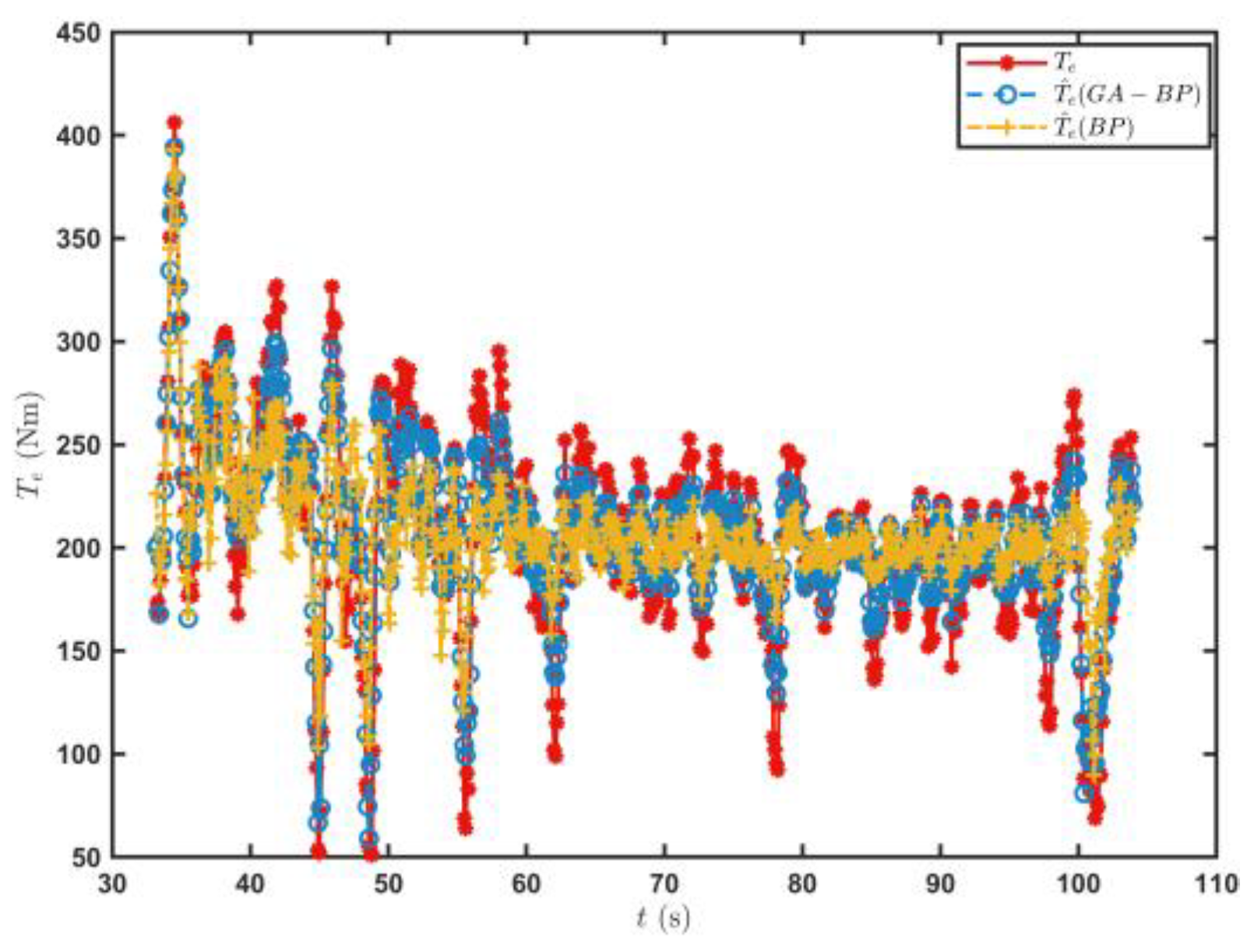
- The engine output torque prediction model obtained by fitting the vehicle driving data with the GA–BP neural network had a high level of engine output torque prediction accuracy. The engine output torque prediction model was established using vehicle driving data, which reduced the calibration work in the engine bench test stage significantly and had real-time updating capabilities. This method provides a new option for the establishment of an engine output torque model.
- (2)
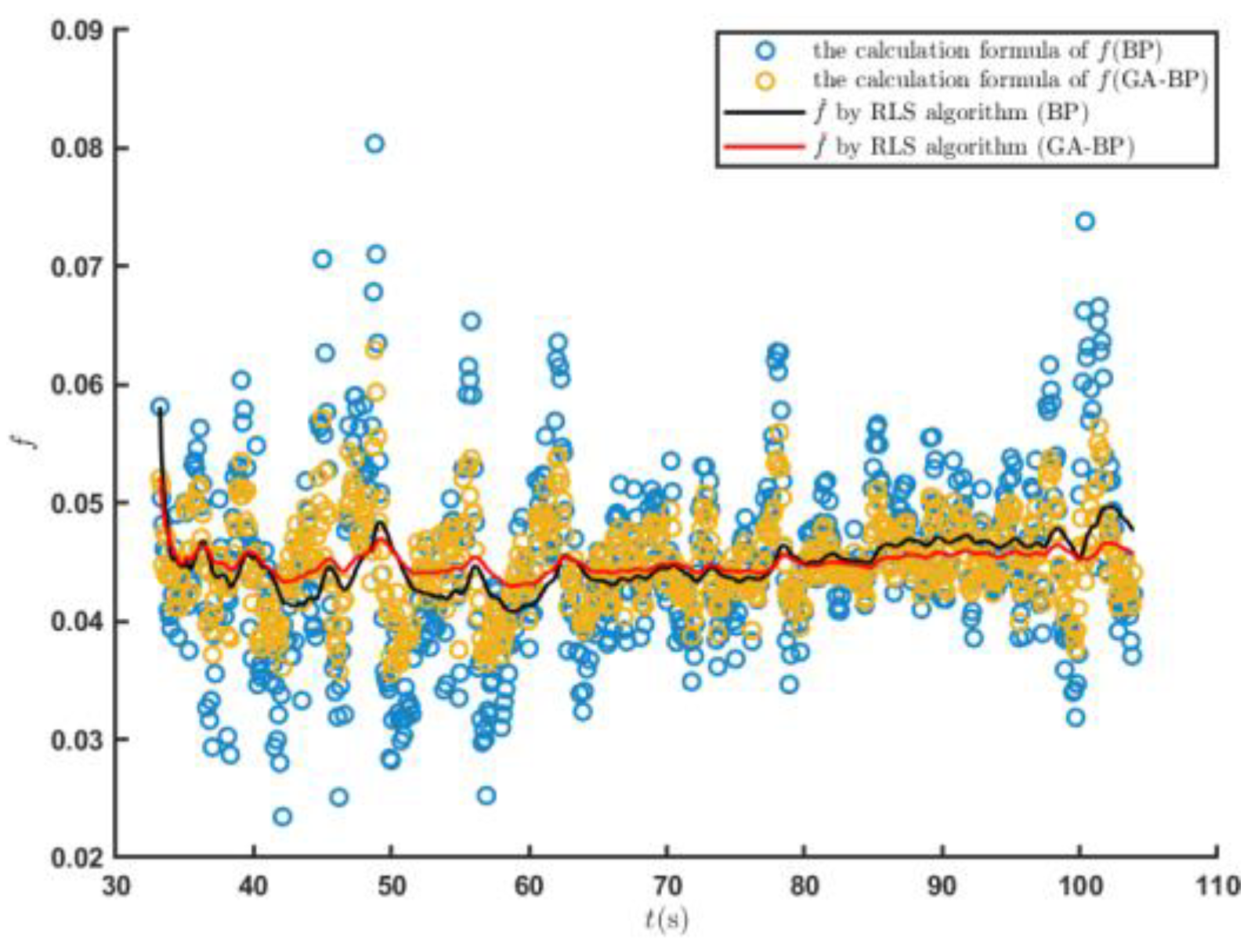
- In this study, a prediction model of the engine output torque was established, and the RLS algorithm was used to estimate the road rolling resistance coefficients of tracked vehicles under certain driving conditions. The experimental results showed that when the tracked vehicle was driving on a sand road and a cement road, the rolling resistance coefficient of the road could be automatically estimated and had high accuracy when the vehicle driving state satisfied the set driving conditions. To a certain extent, this method meets the requirements for the real-time estimation of the rolling resistance coefficient of a road when a tracked vehicle drives longitudinally.
- (3)
- Limited by the system structure of the tracked vehicle and the measurement error of the sensor, to ensure the prediction accuracy of the engine output torque prediction model and the estimation accuracy of the road rolling resistance coefficient, it is necessary to limit the driving conditions of the tracked vehicle, which makes it difficult to apply this model throughout the whole driving process. Determining how to make the tracked vehicle estimate the road parameters over the whole driving process will be the focus of future research.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Purdy, D.J.; Simner, D.; Diskett, D.; Duncan, A.; Wormell, P.J.; Stonier, C. An experimental and theoretical investigation into the roll-over of tracked vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 291–307. [Google Scholar] [CrossRef]
- Lu, E.; Li, W.; Jiang, S.; Liu, Y. Anti-disturbance speed control of permanent magnet synchronous motor based on fractional order sliding mode load observer. IEEE Access 2022. [Google Scholar] [CrossRef]
- Komnos, D.; Broekaert, S.; Grigoratos, T.; Ntziachristos, L.; Fontaras, G. In use determination of aerodynamic and rolling resistances of heavy-duty vehicles. Sustainability 2021, 13, 974. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Q.; Rui, Q.; Gai, J.; Zhou, G. Analyzing and testing verification the performance about high-speed tracked vehicles in steering process. Chin. J. Mech. 2014, 50, 162–172. [Google Scholar] [CrossRef]
- Dewangan, D.K.; Sahu, S.P. RCNet: Road classification convolutional neural networks for intelligent vehicle system. Intell. Serv. Robot. 2021, 14, 199–214. [Google Scholar] [CrossRef]
- Selvathai, T.; Varadhan, J.; Ramesh, S. Road and off road terrain classification for autonomous ground vehicle. In Proceedings of the 2017 International Conference on Information Communication and Embedded Systems (ICICES), Chennai, India, 23–24 February 2017; pp. 1–3. [Google Scholar]
- Valada, A.; Burgard, W. Deep spatiotemporal models for robust proprioceptive terrain classification. Int. J. Robot. Res. 2017, 36, 1521–1539. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, S.; Chen, Y.; Jian, Z.; Zheng, N. Spatial-temproal based lane detection using deep learning. In Proceedings of the Artificial Intelligence Applications and Innovations: 14th IFIP WG 12.5 International Conference, AIAI 2018, Rhodes, Greece, 25–27 May 2018; pp. 143–154. [Google Scholar]
- Zhao, J.; Li, Y.; Zhu, B.; Deng, W.; Sun, B. Method and applications of LiDAR modeling for virtual testing of intelligent vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2990–3000. [Google Scholar] [CrossRef]
- Zhu, Y.; Luo, K.; Ma, C.; Liu, Q.; Jin, B. Superpixel segmentation based synthetic classifications with clear boundary information for a legged robot. Sensors 2018, 18, 2808. [Google Scholar] [CrossRef] [PubMed]
- Rajendran, S.; Spurgeon, S.K.; Tsampardoukas, G.; Hampson, R. Estimation of road frictional force and wheel slip for effective antilock braking system (ABS) control. Int. J. Robust Nonlinear Control. 2019, 29, 736–765. [Google Scholar] [CrossRef]
- Wenbo, C.; Yugong, L.; Jian, L.; Keqiang, L. Vehicle mass and road slope estimates for electric vehicles. J. Tsinghua Univ. (Sci. Technol.) 2014, 54, 724–728. [Google Scholar]
- Liu, P.; Liu, B.; Dong, T.; Zhang, C. Road Roughness Identification and Shift Control Study for a Heavy-duty Powertrain. Energy Procedia 2017, 105, 2885–2890. [Google Scholar] [CrossRef]
- Cong, X.-Y.; Zhang, Y.-G.; Wang, C.-P.; Zhu, H.-X.; Wang, Z.-C. Look-ahead gear-shifting strategy on ramps for heavy trucks with automated mechanical transmission. Adv. Mech. Eng. 2019, 11, 1687814018822911. [Google Scholar] [CrossRef]
- Qian, K.; Hou, Z.; Sun, D. Sound quality estimation of electric vehicles based on GA-BP artificial neural networks. Appl. Sci. 2020, 10, 5567. [Google Scholar] [CrossRef]
- Wang, J.; Alexander, L.; Rajamani, R. Friction estimation on highway vehicles using longitudinal measurements. J. Dyn. Sys. Meas. Control 2004, 126, 265–275. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| () | 31,000 |
| () | 0.283 |
| A () | 6 |
| 0.45 | |
| 1.24 | |
| (1st gear to 5th gear) | 28.35/13.23/9.45/6.71/4.3 |
| (1st gear to 5th gear) | 0.79/0.77/0.76/0.75/0.73 |
| Time (s) | Distance () | Gear | Average Speed (km/h) | (GA–BP) | (BP) | (GA–BP) | (BP) | |
|---|---|---|---|---|---|---|---|---|
| 1 | 56.1–154.6 | 671.13 | 4 | 24.48 | 43.6 | 79.69 | 0.9287 | 0.7624 |
| 2 | 172.2–212.8 | 279.84 | 4 | 24.8 | 32.34 | 60.07 | 0.9305 | 0.7604 |
| 3 | 266–291.8 | 189.63 | 4 | 26.46 | 43.47 | 75.6 | 0.8727 | 0.6452 |
| 4 | 319.8–343.1 | 167.53 | 4 | 25.88 | 35.83 | 75.93 | 0.903 | 0.5640 |
| 5 | 343.3–394.3 | 356.49 | 4 | 25.11 | 40.59 | 76.04 | 0.9118 | 0.6907 |
| 6 | 398.1–411.1 | 96.98 | 5 | 26.82 | 42.59 | 79.97 | 0.9498 | 0.7437 |
| 7 | 415.2–429.6 | 136.84 | 5 | 33.99 | 52.66 | 79.26 | 0.9387 | 0.7832 |
| 8 | 461.6–471.7 | 41.89 | 3 | 14.78 | 51.73 | 69.84 | 0.9184 | 0.7142 |
| 9 | 475.5–498.3 | 57.39 | 2 | 9.04 | 42.95 | 64.35 | 0.8942 | 0.7627 |
| 10 | 596.9–611.2 | 56.83 | 3 | 14.3 | 36.67 | 78.73 | 0.9215 | 0.7608 |
| Time () | Distance () | Gear | Average Speed (km/h) | (GA–BP) | (BP) | (GA–BP) | (BP) | |
|---|---|---|---|---|---|---|---|---|
| 1 | 33.3–104 | 257.9 | 2 | 13.12 | 19.01 | 33.38 | 0.86 | 0.75 |
| 2 | 125.3–144.7 | 75.5 | 2 | 13.45 | 11.2 | 18.12 | 0.83 | 0.748 |
| 3 | 156.1–203.7 | 184.1 | 2 | 13.89 | 10.49 | 18.54 | 0.92 | 0.76 |
| 4 | 221.7–238.4 | 39.8 | 2 | 8.51 | 11.66 | 20.88 | 0.89 | 0.81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, W.; Liu, X.; Jia, G.; Zhang, C.; Sun, B. Research on the Prediction Model of Engine Output Torque and Real-Time Estimation of the Road Rolling Resistance Coefficient in Tracked Vehicles. Sensors 2023, 23, 7549. https://doi.org/10.3390/s23177549
Jia W, Liu X, Jia G, Zhang C, Sun B. Research on the Prediction Model of Engine Output Torque and Real-Time Estimation of the Road Rolling Resistance Coefficient in Tracked Vehicles. Sensors. 2023; 23(17):7549. https://doi.org/10.3390/s23177549
Chicago/Turabian StyleJia, Weijian, Xixia Liu, Guodong Jia, Chuanqing Zhang, and Bin Sun. 2023. "Research on the Prediction Model of Engine Output Torque and Real-Time Estimation of the Road Rolling Resistance Coefficient in Tracked Vehicles" Sensors 23, no. 17: 7549. https://doi.org/10.3390/s23177549
APA StyleJia, W., Liu, X., Jia, G., Zhang, C., & Sun, B. (2023). Research on the Prediction Model of Engine Output Torque and Real-Time Estimation of the Road Rolling Resistance Coefficient in Tracked Vehicles. Sensors, 23(17), 7549. https://doi.org/10.3390/s23177549