





Using System Dynamics Approach to Explore the Mode Shift between Automated Vehicles, Conventional Vehicles, and Public Transport in Melbourne, Australia


Abstract
:1. Introduction
- We developed a system dynamic (SD)-based model to explore the mode shift between conventional vehicles (CVs), AVs, and public transport (PT) by systematically considering a range of factors, such as road network, vehicle cost, public transport supply, and congestion level. This model addresses the knowledge gaps on the impact of AVs towards mode shift by considering a range of factors at the city level.
- Inputs such as current traffic, road capacity, public perception, and technological advancement of AVs are used to assess the effects of different policy options on the transport systems. An SD approach has been adopted for the present study because it can incorporate the dynamic interactions [7] between different travel modes and the feedback loops that could affect the mode shift behaviour. To our best knowledge, this is the first time using an SD model to investigate the impacts of AVs on mode shift in the Australian context.
- The SD model provides a valuable contribution to the methodological understanding of the effects of AVs on transportation by considering various system-level factors. The model can be used to explore the effects of AV adoption on mode shift, changes in traffic congestion, and other transportation-related factors, supporting policy decision making to achieve a sustainable, equitable, and accessible transport system, especially for the long term. This model also presents significant advantages. The SD model not only comprehensively considers various factors and their quantitative relationships, but it also allows for sensitivity analysis of individual variables. This capability enables us to thoroughly investigate the influences of each variable, enhancing the model’s comprehensiveness and utility. Additionally, the SD model is a powerful tool for analysing the complex interactions between different components of the transportation system and identifying potential solutions to the challenges posed by AV adoption. By providing a detailed analysis of the effects of AV adoption on modal shift behaviour, the proposed model can help policymakers develop policies that promote the adoption of AVs while also minimising the negative effects on PT and congestion.
2. Literature Review
2.1. Transport Modelling
2.2. System Dynamics Modelling
3. Methods
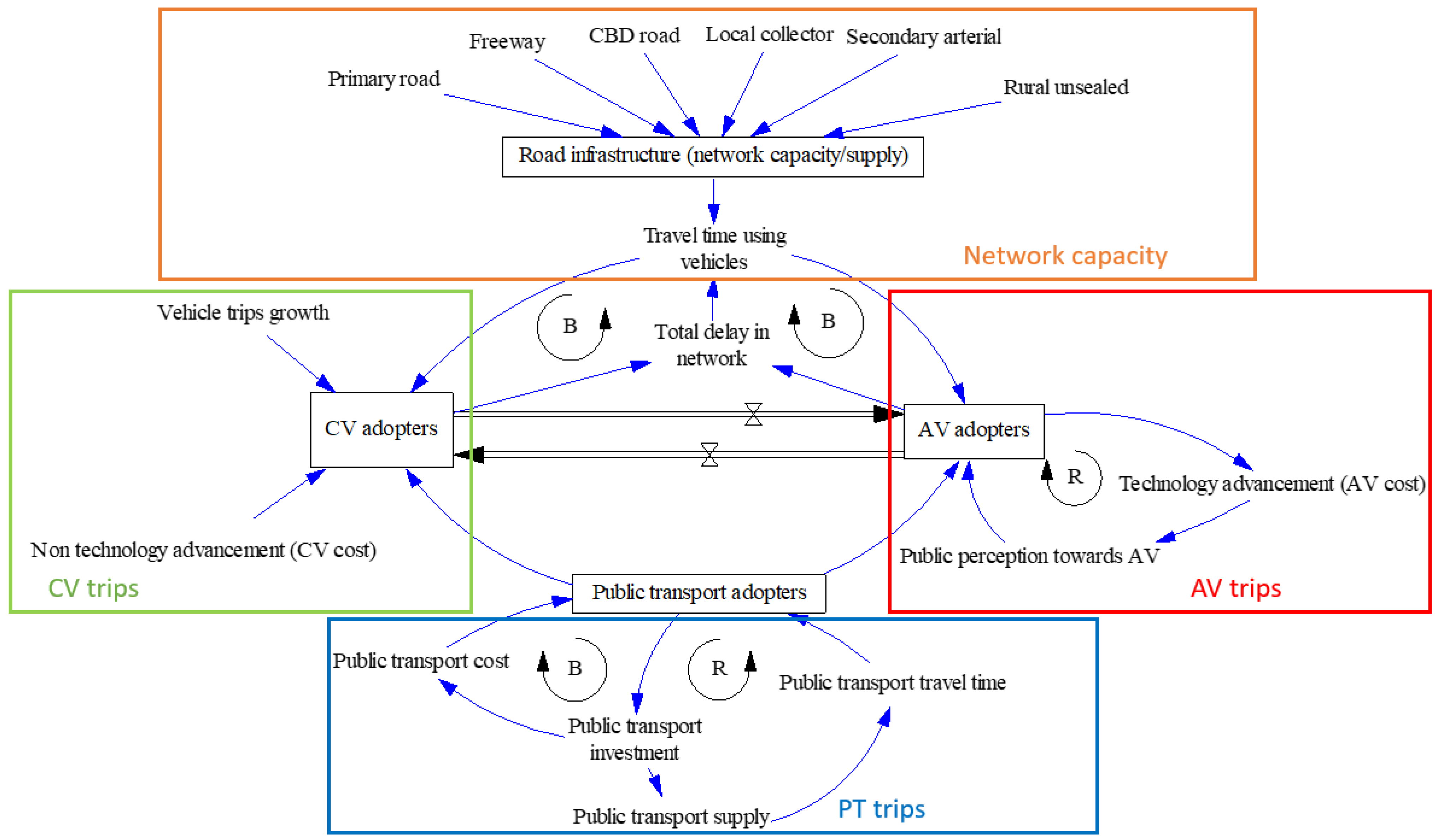
3.1. Description of the System in This Study
3.2. Model Explanation
3.2.1. Data Input
3.2.2. Calculations
3.3. Sub-Model Explanation
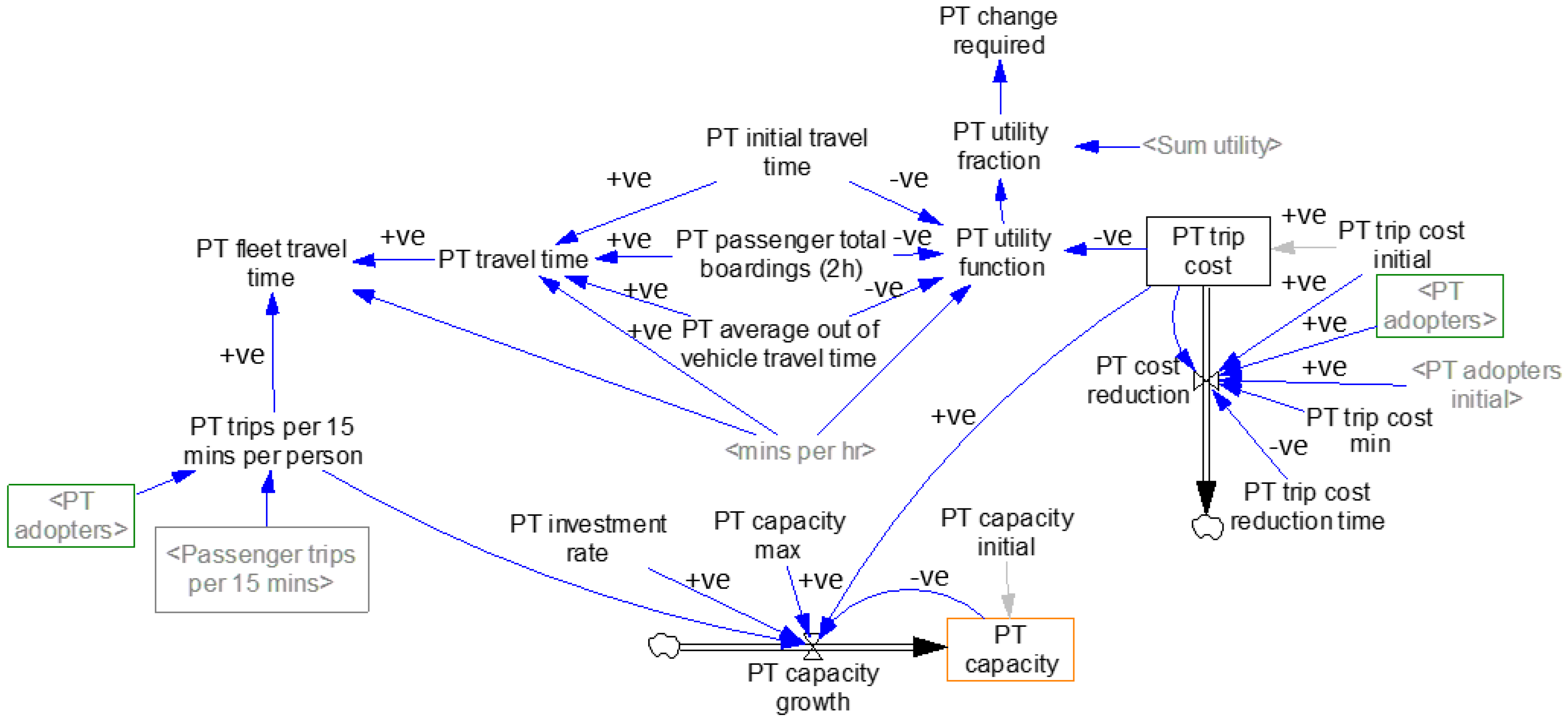
3.3.1. Public Transport Sub-Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Unit | Value (Equation) | Source/Explanation |
|---|---|---|---|
| Sum utility | N/A | EXP (CV utility) + EXP (AV utility) + EXP (PT utility) | Utility function [34]. |
| PT change required | N/A | Percentage changes in individuals opting for public transport as their primary mode during each simulation interval. | |
| PT utility function | N/A | −0.049 × (PT initial travel time × min per h/”PT passenger total boardings (2 h)”) − 0.05 × PT average out-of-vehicle travel time − 0.0038 × PT trip cost | Probability of choosing PT as commuting mode based on travel time and cost during any 15 min at AM peak. |
| PT initial travel time | Person × hour | 165,795 | Collective travel duration via various modes such as trains, trams, and buses, as supplied by the VITM model from DTP for input into this system dynamics model. |
| PT passenger total boarding (2 h) | Person | 508,420 | Cumulative count of person boardings on public transport encompassing train, bus, and tram trips. This information is furnished by the VITM model from DTP during the AM peak period spanning 2 h. |
| PT average out-of-vehicle travel time | Minute | 11 | VISTA provided by DTP. |
| PT travel time | Minute | PT initial travel time × min per h/“PT passenger total boardings (2 h)” + PT average out-of-vehicle travel time | PT travel time includes in-vehicle travel time and out-of-vehicle travel time. |
| PT fleet travel time | Person × hour | PT trips per 15 min per person × PT travel time/min per h | Total public transport fleet travel time including trains, trams, and buses. |
| PT trips per 15 min per person | Person | Passenger trips per 15 min × PT adopters | It is to determine the number of people who choose PT modes across total people. |
| PT investment rate | Dmnl/Year/Person/dollar | 1 × 10−9 | Amount by which ‘PT capacity’ grows each year for each dollar spent on PT. |
| PT capacity max | Dmnl | 0.5 | Fraction of passenger travel that PT can ultimately service. |
| PT capacity growth | Dmnl/Year | PT trip cost × PT trips per 15 min per person × PT investment rate × (PT capacity max − PT capacity)/PT capacity max |
3.3.2. Network Capacity Sub-Model
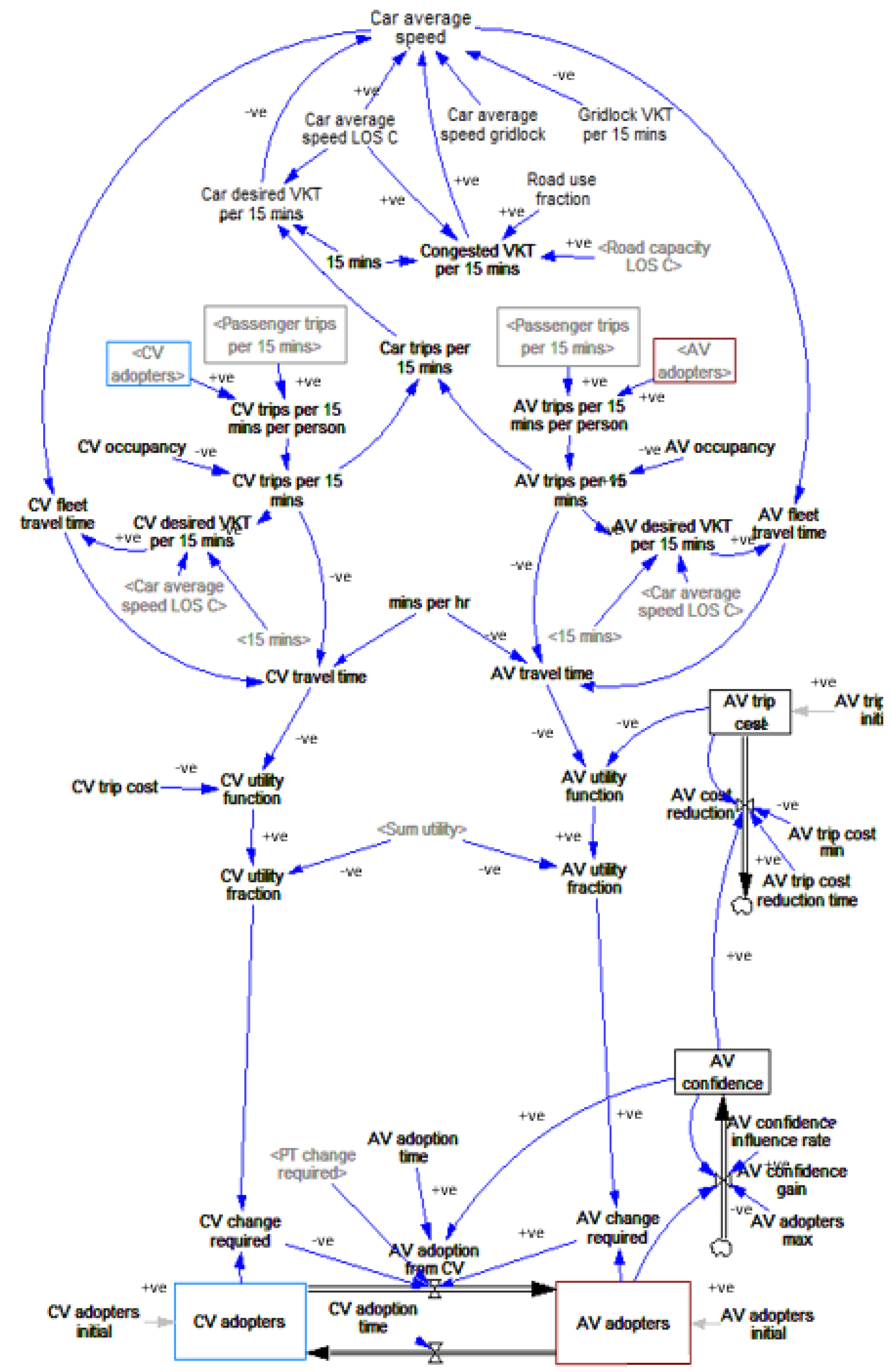
3.3.3. CV Transitions to AV Sub-Model
3.4. Testing
3.5. Scenarios
4. Results
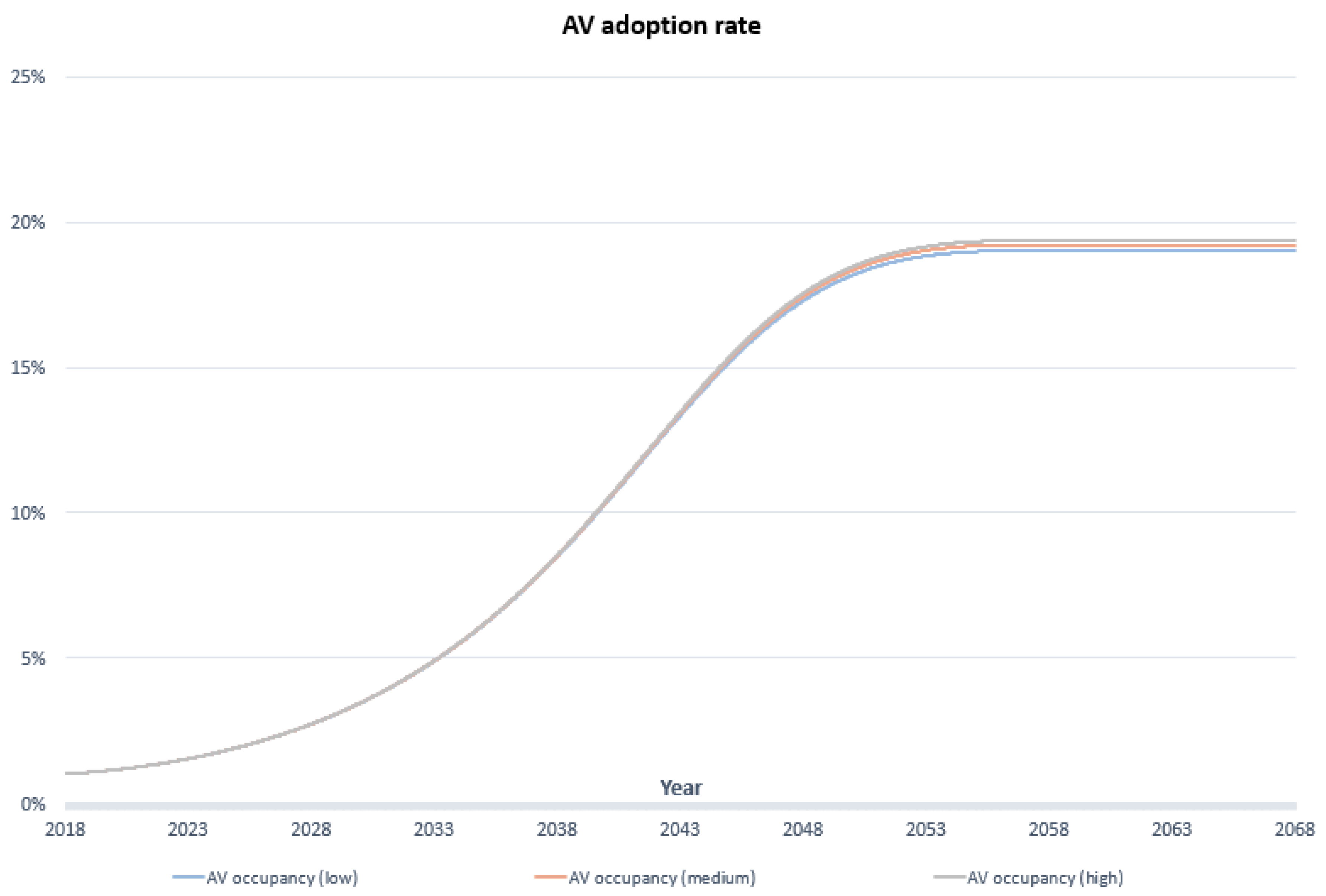
4.1. Baseline Scenario
4.2. Other Scenarios
4.3. Road Expansion and Awareness Program Scenarios
5. Discussion
5.1. AV Adoption
5.2. Awareness Programs
5.3. Cost
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Eskandarian, A.; Wu, C.; Sun, C. Research Advances and Challenges of Autonomous and Connected Ground Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 683–711. [Google Scholar] [CrossRef]
- SAE International. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 6 February 2023).
- Zou, X.; O’Hern, S.; Ens, B.; Coxon, S.; Mater, P.; Chow, R.; Neylan, M.; Vu, H. On-road virtual reality autonomous vehicle (VRAV) simulator: An empirical study on user experience. Transp. Res. Part C Emerg. Technol. 2021, 126, 103090. [Google Scholar] [CrossRef]
- Chen, Y.; Shiwakoti, N.; Stasinopoulos, P.; Khalid Khan, S. State-of-the-Art of Factors Affecting the Adoption of Automated Vehicles. Sustainability 2022, 14, 6697. [Google Scholar] [CrossRef]
- Zong, F.; Wang, M.; Tang, J.; Zeng, M. Modeling AVs & RVs’ car-following behavior by considering impacts of multiple surrounding vehicles and driving characteristics. Phys. A Stat. Mech. Its Appl. 2022, 589, 126625. [Google Scholar]
- Li, J.; Rombaut, E.; Vanhaverbeke, L. A systematic review of agent-based models for autonomous vehicles in urban mobility and logistics: Possibilities for integrated simulation models. Comput. Environ. Urban Syst. 2021, 89, 101686. [Google Scholar] [CrossRef]
- Nassar, R.F.; Ghisolfi, V.; Annema, J.A.; van Binsbergen, A.; Tavasszy, L.A. A system dynamics model for analyzing modal shift policies towards decarbonization in freight transportation. Res. Transp. Bus. Manag. 2023, 48, 100966. [Google Scholar] [CrossRef]
- Gu, Z.; Wang, Z.; Liu, Z.; Saberi, M. Network traffic instability with automated driving and cooperative merging. Transp. Res. Part C Emerg. Technol. 2022, 138, 103626. [Google Scholar] [CrossRef]
- Yu, H.; Jiang, R.; He, Z.; Zheng, Z.; Li, L.; Liu, R.; Chen, X. Automated vehicle-involved traffic flow studies: A survey of assumptions, models, speculations, and perspectives. Transp. Res. Part C Emerg. Technol. 2021, 127, 103101. [Google Scholar] [CrossRef]
- Hu, J.; Kong, L.; Shu, W.; Wu, M.-Y. Scheduling of connected autonomous vehicles on highway lanes. In Proceedings of the 2012 IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012; pp. 5556–5561. [Google Scholar]
- Overtoom, I.; Correia, G.; Huang, Y.; Verbraeck, A. Assessing the impacts of shared autonomous vehicles on congestion and curb use: A traffic simulation study in The Hague, Netherlands. Int. J. Transp. Sci. Technol. 2020, 9, 195–206. [Google Scholar] [CrossRef]
- Fakhrmoosavi, F.; Kamjoo, E.; Kavianipour, M.; Zockaie, A.; Talebpour, A.; Mittal, A. A stochastic framework using Bayesian optimization algorithm to assess the network-level societal impacts of connected and autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2022, 139, 103663. [Google Scholar] [CrossRef]
- Chen, B.; Sun, D.; Zhou, J.; Wong, W.; Ding, Z. A future intelligent traffic system with mixed autonomous vehicles and human-driven vehicles. Inf. Sci. 2020, 529, 59–72. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Evaluating the impact of connected and autonomous vehicles on traffic safety. Phys. A Stat. Mech. Its Appl. 2019, 526, 121009. [Google Scholar] [CrossRef]
- Hamad, K.; Alozi, A.R. Shared vs. dedicated lanes for automated vehicle deployment: A simulation-based assessment. Int. J. Transp. Sci. Technol. 2022, 11, 205–215. [Google Scholar] [CrossRef]
- Vecchio, P.D.; Secundo, G.; Maruccia, Y.; Passiante, G. A system dynamic approach for the smart mobility of people: Implications in the age of big data. Technol. Forecast. Soc. Change 2019, 149, 119771. [Google Scholar] [CrossRef]
- Feng, B.; Ye, Q.; Collins, B.J. A dynamic model of electric vehicle adoption: The role of social commerce in new transportation. Inf. Manag. 2019, 56, 196–212. [Google Scholar] [CrossRef]
- Wu, D.; Ning, S. Dynamic assessment of urban economy-environment-energy system using system dynamics model: A case study in Beijing. Environ. Res. 2018, 164, 70–84. [Google Scholar] [CrossRef]
- Madadi, B.; van Nes, R.; Snelder, M.; van Arem, B. Multi-stage optimal design of road networks for automated vehicles with elastic multi-class demand. Comput. Oper. Res. 2021, 136, 105483. [Google Scholar] [CrossRef]
- Wang, X.; Lin, X.; Li, M. Aggregate modeling and equilibrium analysis of the crowdsourcing market for autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2021, 132, 103362. [Google Scholar] [CrossRef]
- Hasnat, M.M.; Bardaka, E.; Samandar, M.S. Differential impacts of autonomous and connected-autonomous vehicles on household residential location. Travel Behav. Soc. 2023, 32, 100570. [Google Scholar] [CrossRef]
- SBS News. Available online: https://www.sbs.com.au/news/article/tough-road-ahead-self-driving-cars-are-taking-off-in-the-us-but-australians-might-be-waiting-a-while-yet/a5ebp93on (accessed on 8 February 2023).
- Gruel, W.; Stanford, J.M. Assessing the Long-Term Effects of Autonomous Vehicles: A speculative approach. Transp. Res. Procedia 2016, 13, 18–29. [Google Scholar] [CrossRef]
- Nieuwenhuijsen, J.; Homem de Almeida Correia, G.; Milakis, D.; Arem, B.; Daalen, E. Towards a quantitative method to analyze the long-term innovation diffustion of automated vehicles technology using system dynamics. Transp. Res. Part C 2018, 86, 300–327. [Google Scholar] [CrossRef]
- Puylaert, S.; Snelder, M.; van Nes, R.; van Arem, B. Mobility impacts of early forms of automated driving—A system dynamic approach. Transp. Policy 2018, 72, 171–179. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, P.; Ni, S. Assessment of the Impacts of Urban Rail Transit on Metropolitan Regions Using System Dynamics Model. Transp. Res. Procedia 2014, 4, 521–534. [Google Scholar] [CrossRef]
- Stasinopoulos, P.; Shiwakoti, N.; Beining, M. Use-stage life cycle greenhouse gas emissions of the transition to an autonomous vehicle fleet: A System Dynamics approach. J. Clean. Prod. 2021, 278, 123447. [Google Scholar] [CrossRef]
- Bhardwaj, C.; Axsen, J.; Crawford, C. Simulating long-term emissions from private automated vehicles under climate policies. Transp. Res. Part D Transp. Environ. 2023, 118, 103665. [Google Scholar] [CrossRef]
- Laufer, J.; Shahhoseini, Z.; Yue, W.L.; Javanshour, F. The Development of a Mesoscopic Melbourne Model. In Proceedings of the Australasian Transport Research Forum 2019 Proceedings, Canberra, Australia, 30 September–2 October 2019. [Google Scholar]
- Currie, G.; Delbosc, A. Exploring the trip chaining behaviour of public transport users in Melbourne. Transp. Policy 2011, 18, 204–210. [Google Scholar] [CrossRef]
- Nguyen-Phuoc, D.Q.; Currie, G.; De Gruyter, C.; Young, W. Congestion relief and public transport: An enhanced method using disaggregate mode shift evidence. Case Stud. Transp. Policy 2018, 6, 518–528. [Google Scholar] [CrossRef]
- Chen, Y. Modelling the Adoption and Deployment of Automated Vehicles. Ph.D. Thesis, RMIT University, Melbourne, Australia, 2023. [Google Scholar]
- Li, Z.; Hensher, D.; Rose, J. Willingness to Pay for Travel Time Reliability in Passenger Transport: A Review and Some New Empirical Evidence. Transp. Res. Part E Logist. Transp. Rev. 2010, 46, 384–403. [Google Scholar] [CrossRef]
- Australian Transport Assessment and Planning. Available online: https://www.atap.gov.au/tools-techniques/travel-demand-modelling/appendix-b (accessed on 30 March 2023).
- Miller, E.J. Simulating Autonomous Vehicles: A Discussion Paper and Research Proposal; University of Toronto Transportation Research Institute: Toronto, ON, Canada, 2016. [Google Scholar]
- Chen, S.; Wang, H.; Meng, Q. Designing autonomous vehicle incentive program with uncertain vehicle purchase price. Transp. Res. Part C Emerg. Technol. 2019, 103, 226–245. [Google Scholar] [CrossRef]
- Sharma, I.; Mishra, S. Quantifying the consumer’s dependence on different information sources on acceptance of autonomous vehicles. Transp. Res. Part A Policy Pract. 2022, 160, 179–203. [Google Scholar] [CrossRef]
- Sterman, J.D. System dynamics modeling: Tools for learning in a complex world. Calif. Manag. Rev. 2001, 43, 8–25. [Google Scholar] [CrossRef]
- Mo, B.; Wang, Q.; Moody, J.; Shen, Y.; Zhao, J. Impacts of subjective evaluations and inertia from existing travel modes on adoption of autonomous mobility-on-demand. Transp. Res. Part C Emerg. Technol. 2021, 130, 103281. [Google Scholar] [CrossRef]
- Dubey, S.; Sharma, I.; Mishra, S.; Cats, O.; Bansal, P. A General Framework to Forecast the Adoption of Novel Products: A Case of Autonomous Vehicles. Transp. Res. Part B Methodol. 2022, 165, 63–95. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Luo, Q.; Saigal, R.; Chen, Z.; Yin, Y. Accelerating the adoption of automated vehicles by subsidies: A dynamic games approach. Transp. Res. Part B Methodol. 2019, 129, 226–243. [Google Scholar] [CrossRef]
- Wang, S.; Li, Z.; Levin, M.W. Optimal policy for integrating Autonomous Vehicles into the auto market. Transp. Res. Part C Emerg. Technol. 2022, 143, 103821. [Google Scholar] [CrossRef]
- LIorca, C.; Moreno, A.; Ammar, G.; Moeckel, R. Impact of autonomous vehicles on household relocation: An agent-based simulation. Cities 2022, 126, 103692. [Google Scholar] [CrossRef]
- Nguyen-Phuoc, D.; Zhou, M.; Chua, M.; Alho, A.; Oh, S.; Seshadri, R.; Le-Klähn, D. Examining the effects of Automated Mobility-on-Demand services on public transport systems using an agent-based simulation approach. Transp. Res. Part A Policy Pract. 2023, 169, 103583. [Google Scholar] [CrossRef]
- Gopinath, K.; Narayanamurthy, G. Early bird catches the worm! Meta-analysis of autonomous vehicles adoption—Moderating role of automation level, ownership and culture. Int. J. Inf. Manag. 2022, 66, 102536. [Google Scholar] [CrossRef]
- Raj, A.; Kumar, J.A.; Bansal, P. A multicriteria decision making approach to study barriers to the adoption of autonomous vehicles. Transp. Res. Part A Policy Pract. 2020, 133, 122–137. [Google Scholar] [CrossRef]
- Milakis, D.; Muller, S. The societal dimension of the automated vehicles transition: Towards a research agenda. Cities 2021, 113, 103144. [Google Scholar] [CrossRef]
- Zhang, Q.; Ma, S.; Tian, J.; Rose, J.; Ning, J. Mode choice between autonomous vehicles and manually-driven vehicles: An experimental study of information and reward. Transp. Res. Part A Policy Pract. 2022, 157, 24–39. [Google Scholar] [CrossRef]
- Singh, H.; Kavianipour, M.; Ghamami, M. Adoption of autonomous and electric vehicles in private and shared mobility systems. Transp. Res. Part D Transp. Environ. 2023, 115, 103561. [Google Scholar] [CrossRef]
- Shabanpour, R.; Golshani, N.; Shamshiripour, A.; Mohammadian, A. Eliciting preferences for adoption of fully automated vehicles using best-worst analysis. Transp. Res. Part C Emerg. Technol. 2018, 93, 463–478. [Google Scholar] [CrossRef]
- Rezaei, A.; Caulfield, B. Examining public acceptance of autonomous mobility. Travel Behav. Soc. 2020, 21, 235–246. [Google Scholar] [CrossRef]
- Irannezhad, E.; Mahadevan, R. Examining factors influencing the adoption of solo, pooling and autonomous ride-hailing services in Australia. Transp. Res. Part C Emerg. Technol. 2022, 134, 103524. [Google Scholar] [CrossRef]
- Duan, C. Dynamic Bayesian monitoring and detection for partially observable machines under multivariate observations. Mech. Syst. Signal Process 2021, 158, 107714. [Google Scholar] [CrossRef]



| Abbreviation | Explanation |
|---|---|
| AVs | Automated Vehicles |
| CVs | Conventional Vehicles |
| PT | Public Transport |
| LoS | Level of Service |
| CAVs | Connected and Autonomous Vehicles |
| VITM | Victorian Integrated Transport Model |
| EVs | Electric Vehicles |
| SD | System Dynamic |
| VISTA | Victorian Integrated Survey of Travel and Activity |
| EVs | Electric Vehicles |
| DTP | Department of Transport and Planning |
| CBD | Central Business District |
| VKT | Vehicle Kilometre Travelled |
| Purpose | Variable | Strength | Conclusion | Future Study Suggestion/Limitation |
|---|---|---|---|---|
| To evaluate the construction scale of urban rail for traffic, economy, and society [26] | GDP, population, accident, gas emission, congestion degree; construction scale was a policy variable | Presented the effect of the urban rail system on urban traffic, economy, society, and environment; guided transportation infrastructure planning | As the mileage of urban rail increased, the number of cars increased; appropriate construction of urban rail would help | Some variables need more research, such as sociology, economics, and demography |
| To evaluate the effects of AVs on mode choice and broader transportation system [23] | Travel time, public transit fare, traffic volume, adequacy of PT, etc. | Three different scenarios to investigate the effect on mode choice and mobility | Better to obtain public acceptance of AVs as shared-use vehicles or PT tools before establishing the mindset of private vehicles | Public discussion should be initiated to fully understand views on AVs when AVs are in the market |
| To evaluate the innovation diffusion of AVs in the long term [24] | Technology maturity, research and development funds, attractiveness, purchase price, and fleet | Complex and dynamic innovation systems of AVs and six levels of AVs were represented | System was highly uncertain due to different market penetration levels and policies adopted | Further research could focus on gaining more knowledge of factors affecting the diffusion of AVs by leveraging this model |
| To evaluate the mobility effects of AVs [25] | Mode choice, travel time, and time of day choice | Uncertainties were incorporated into penetration rates, capacity, and value of time | AVs could cause increased car trips and level of congestion | Extend the model by considering travel time reliability, road pricing policy, and ride-sharing |
| A useful approach for optimising individuals’ mobility and guiding city planners [16] | Rail, car, bus, and air customers (mode choice) | What factors influence people’s choices and can model their behaviours; several scenarios were included (sensitive to price, trip duration, and need to stay overnight) | Customers were not sensitive to price, trip duration, need to stay overnight, or need to use additional means of transport | Future research should be parametrised to identify more details for individual platforms |
| Adoption of EVs [17] | Economic utility (cost, infrastructure convenience, and vehicle technology) and social utility | Complex interaction and how feedback can affect EV adoption | Consumers’ vague perceptions and pilot of EV projects led to delays in EV adoption; however, social commerce helped | Future research should focus on EV adoption through combinations of incentive plans |
| To evaluate the effects of AV adoption on greenhouse gas emissions [27] | Emissions, fleet, and adoption | Life cycle assessment to assess the various scenarios in the medium to long term | To decrease greenhouse gas emissions, the government should manage vehicle travel speeds, provide subsidies, and increase the renewable electricity supply | Further research needs to focus on developing the model in conjunction with other methods to support the investigation of greenhouse emission process |
| Parameter Name | Unit | Value (Equation) | Source/Explanation |
|---|---|---|---|
| Local collector density | Car/km | 11.2 | LoS C standard (HCM 2016) |
| Local collector length | km | 5572.5 | VITM provided by DTP |
| Secondary arterial density/ Rural unsealed density/Ramp terminal density/Primary divided density/Primary undivided density/CBD density | Car/km | 13.7 | LoS C standard |
| Secondary arterial length | km | 3626.84 | VITM provided by DTP |
| Rural unsealed length | km | 741.2 | VITM provided by DTP |
| Level crossing length | km | 84.83 | VITM provided by DTP |
| Ramp terminal length | km | 29.58 | VITM provided by DTP |
| Freeway density | Car/km | 16.2 | LoS C standard (HCM 2016) |
| Freeway length | km | 2707.51 | VITM provided by DTP |
| Primary divided length | km | 4113.7 | VITM provided by DTP |
| Primary undivided length | km | 4010.57 | VITM provided by DTP |
| CBD length | km | 64.04 | Sourced from the VITM model to provide input for this analysis, signifying the road length within Melbourne’s central business district (CBD) in kilometres |
| CBD density | Car/km | 13.7 | Acquired from the traffic engineering standard, specifically the level of service C standard, to ascertain the optimal traffic density for vehicle movement to travel smoothly |
| Parameter Name | Unit | Value (Equation) | Source/Explanation |
|---|---|---|---|
| AV/CV desired VKT per 15 min | Car × km | AV/CV trips per 15 min × Car average speed LoS C × “15 min” | Maximum car capacity in the network that does not lead to congestion |
| AV/CV occupancy | Person/Car | 1.1 | Average number of persons per car |
| AV/CV trips per 15 min | Car | AV/CV trips per 15 min per person/AV/CV occupancy | Number of AV/CV trips for any 15 min during AM peak |
| AV/CV trips per 15 min per person | Person | Passenger trips per 15 min × AV/CV adopters | Number of AV/CV trips among total trips generated by private vehicle trips and PT trips |
| AV/CV fleet travel time | Car × hour | AV/CV desired VKT per 15 min/Car average speed | Vehicle × km/km/h equals vehicle × h |
| AV/CV travel time | Minute | AV fleet travel time × min per h/AV trips per 15 min | Average AV/CV travel time per vehicle |
| AV/CV utility function | N/A | −1.55–0.066 × AV/CV travel time − 0.004 × AV/CV trip cost | It is an AV/CV utility function to determine the probability of choosing AV/CV mode |
| Car average speed | km/hour | Car average speed LoS C − (Car desired VKT per 15 min − Congested VKT per 15 min)× (Car average speed LoS C − Car average speed gridlock)/(Gridlock VKT per 15 min − Congested VKT per 15 min) | Vehicle speed decreases as VKT exceeds the congestion threshold |
| Car average speed LoS C | km/hour | 48.1 | VITM provided by DTP |
| Congested VKT per 15 min | Car × km | Road capacity LoS C × Road use fraction × Car average speed LoS C × “15 min” | Threshold for congestion in a network level depends on average vehicle speed (travel in a smooth way) and road capacity |
| Road use fraction | N/A | 0.62 | This is the assumed value as there are some roads that are seldomly used in Victorian network |
| AV adopters initial | Dmnl | 0.01 | This must be greater than zero to avoid a ‘floating point error’ due to division by zero in ‘AV travel time’ at t = 0 |
| Scenario | Parameter Name | Unit | Value | ||
|---|---|---|---|---|---|
| Low | Neutral | High | |||
| Baseline | AV adopters max | N/A | 90% | ||
| AV trip cost min | N/A | 400 | |||
| PT capacity max | N/A | 50% | |||
| 1a | AV adopters max | Fraction | 40% | ||
| 1b | 60% | ||||
| 1c | 100% | ||||
| 2a | AV trip cost min | N/A | 360 | ||
| 2b | N/A | 430 | |||
| 3a | PT capacity | Fraction | 30% | ||
| 3b | 60% | ||||
| Lower | AV adopters max | Fraction | 40% | ||
| AV trip cost min | N/A | 430 | |||
| PT capacity max | Fraction | 60% | |||
| Upper | AV adopters max | Fraction | 100% | ||
| AV trip cost min | N/A | 360 | |||
| PT capacity max | Fraction | 30% | |||
| Scenario | Parameter Name | Unit | Value | |||
|---|---|---|---|---|---|---|
| Baseline | Low | Neutral | High | |||
| Road expansion program | Road expansion rate | Fraction | 0% | |||
| 1% | ||||||
| 2% | ||||||
| 3% | ||||||
| AV awareness program | AV confidence influence rate | Fraction | 40% | |||
| 60% | ||||||
| 80% | ||||||
| 100% | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Stasinopoulos, P.; Shiwakoti, N.; Khan, S.K. Using System Dynamics Approach to Explore the Mode Shift between Automated Vehicles, Conventional Vehicles, and Public Transport in Melbourne, Australia. Sensors 2023, 23, 7388. https://doi.org/10.3390/s23177388
Chen Y, Stasinopoulos P, Shiwakoti N, Khan SK. Using System Dynamics Approach to Explore the Mode Shift between Automated Vehicles, Conventional Vehicles, and Public Transport in Melbourne, Australia. Sensors. 2023; 23(17):7388. https://doi.org/10.3390/s23177388
Chicago/Turabian StyleChen, Yilun, Peter Stasinopoulos, Nirajan Shiwakoti, and Shah Khalid Khan. 2023. "Using System Dynamics Approach to Explore the Mode Shift between Automated Vehicles, Conventional Vehicles, and Public Transport in Melbourne, Australia" Sensors 23, no. 17: 7388. https://doi.org/10.3390/s23177388
APA StyleChen, Y., Stasinopoulos, P., Shiwakoti, N., & Khan, S. K. (2023). Using System Dynamics Approach to Explore the Mode Shift between Automated Vehicles, Conventional Vehicles, and Public Transport in Melbourne, Australia. Sensors, 23(17), 7388. https://doi.org/10.3390/s23177388