
Monitoring Distracted Driving Behaviours with Smartphones: An Extended Systematic Literature Review


Abstract
:1. Introduction and Motivation
2. Background
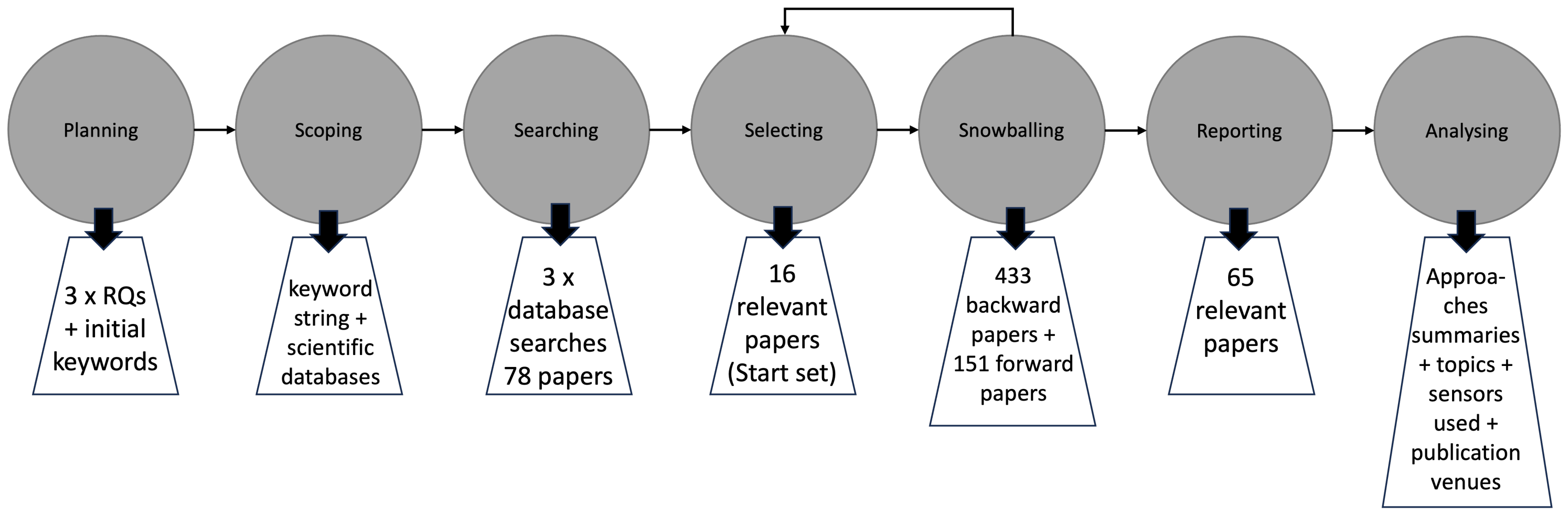
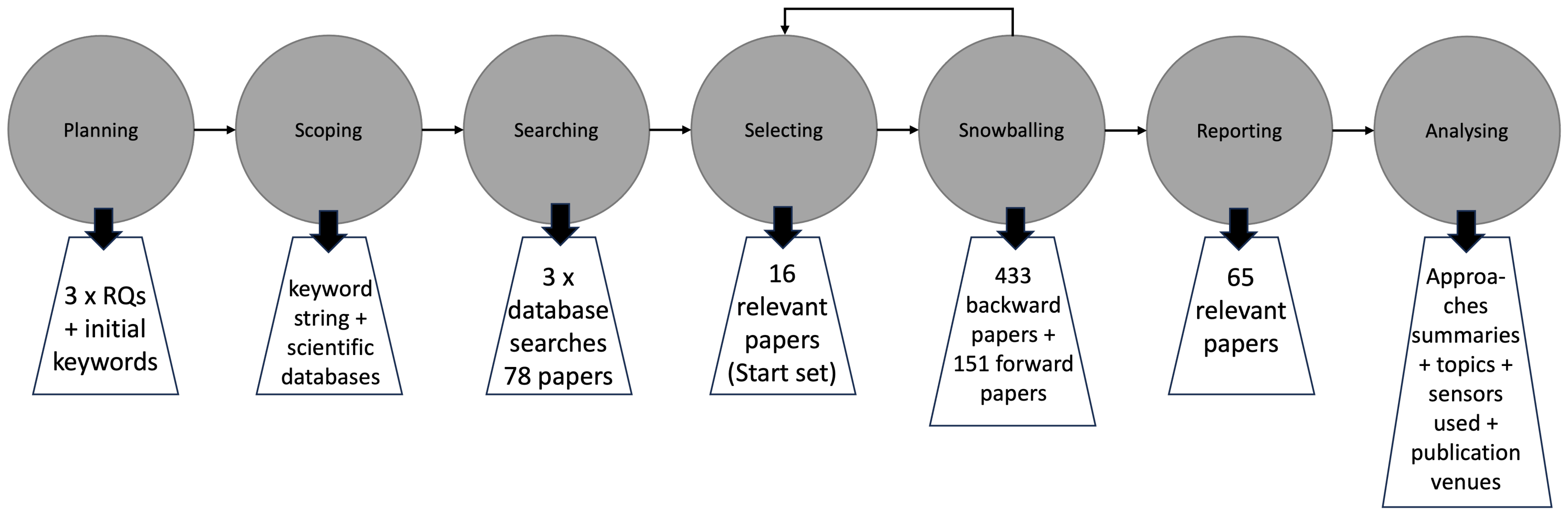
3. Method
3.1. Planning
- RQ1: What smartphone-based approaches for driver distraction detection have been published in the last ten years?
- RQ2: What smartphone sensors and detection methods have been used?
- RQ3: What tangible results have been achieved by using smartphone-based detection approaches?
3.2. Scoping
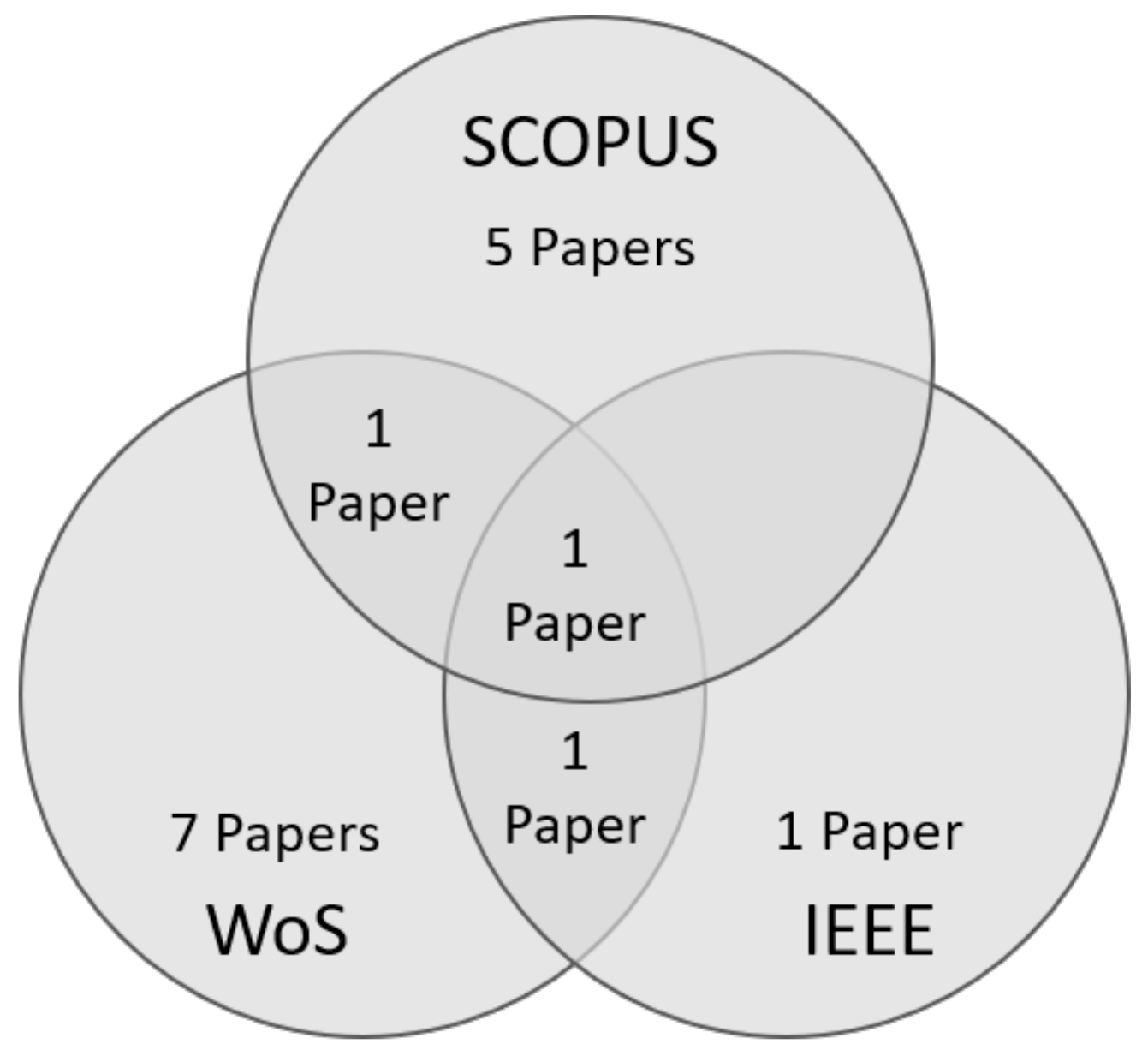
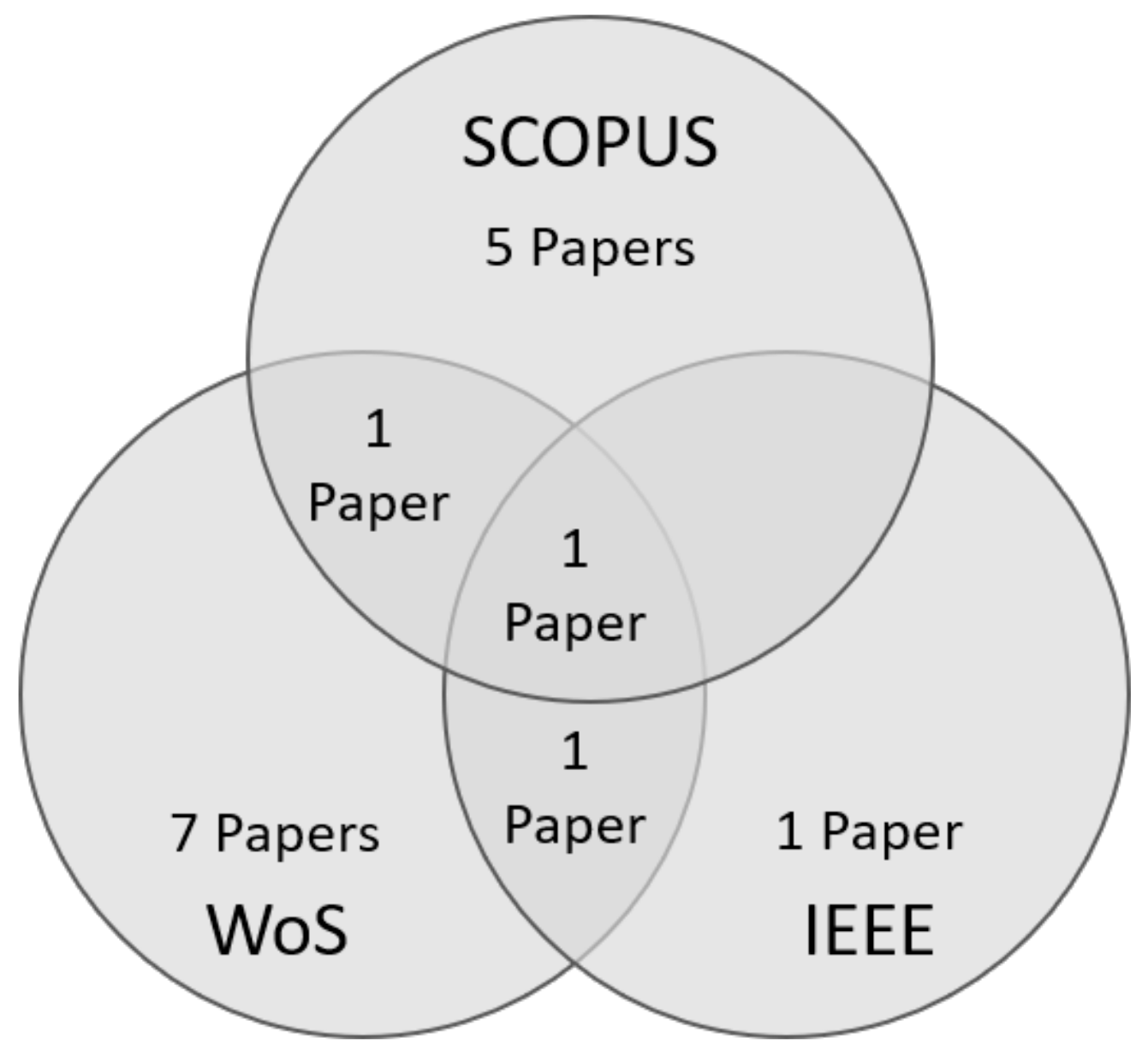
3.3. Searching
3.4. Selecting
- Exclude results that are handbooks, Ph.D. theses, patents, or only abstracts;
- Exclude results that are citations or conference proceedings;
- Exclude duplicates and papers in languages other than English;
- Exclude results that do not use smartphone data or phone data.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Researcher | Initial Analysis | Iteration 1 | Iteration 2 | Consolidation |
|---|---|---|---|---|
| 1 | Incl.: 232+57 | Incl.: 19 + 2 Excl.: 213 + 55 | Incl.: 16 + 2 Excl.: 216 + 55 | |
| 2 | Incl.: 201 + 94 | Incl.: 40 + 11 Excl.: 161 + 83 | Incl.: 20 + 9 Excl.: 181 + 85 | |
| 3 | Incl.: 0 + 397 | Incl.: 0 + 135 Excl.: 0 + 262 | Incl.: 0 + 11 Excl.: 0 + 386 | |
| 1, 2, and 3 (combined) | Incl.: 433 + 151 | Incl.: 59 + 13 Excl.: 374 + 138 | Incl.: 36 + 11 Excl.: 397 + 140 | Incl.: 31 + 11 + 7 Excl.: 402 + 135 |
3.5. Snowballing
- Exclude white papers, technical reports, and pre-prints;
- Exclude press releases, annual reports, and factsheets;
- Exclude links to products, software code, or datasets;
- Exclude papers that were not about driver monitoring.
4. Results
4.1. Author-Centric Analysis: Summary of Individual Results
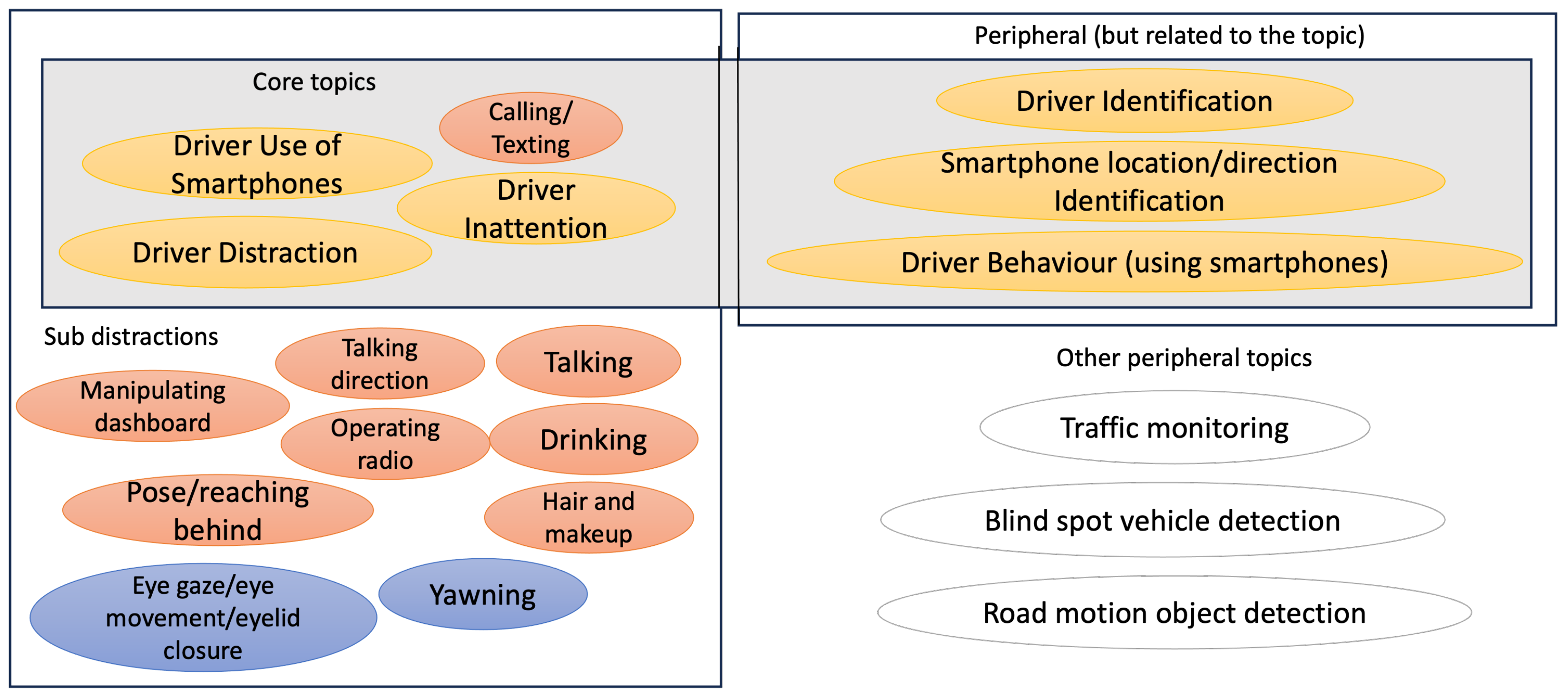
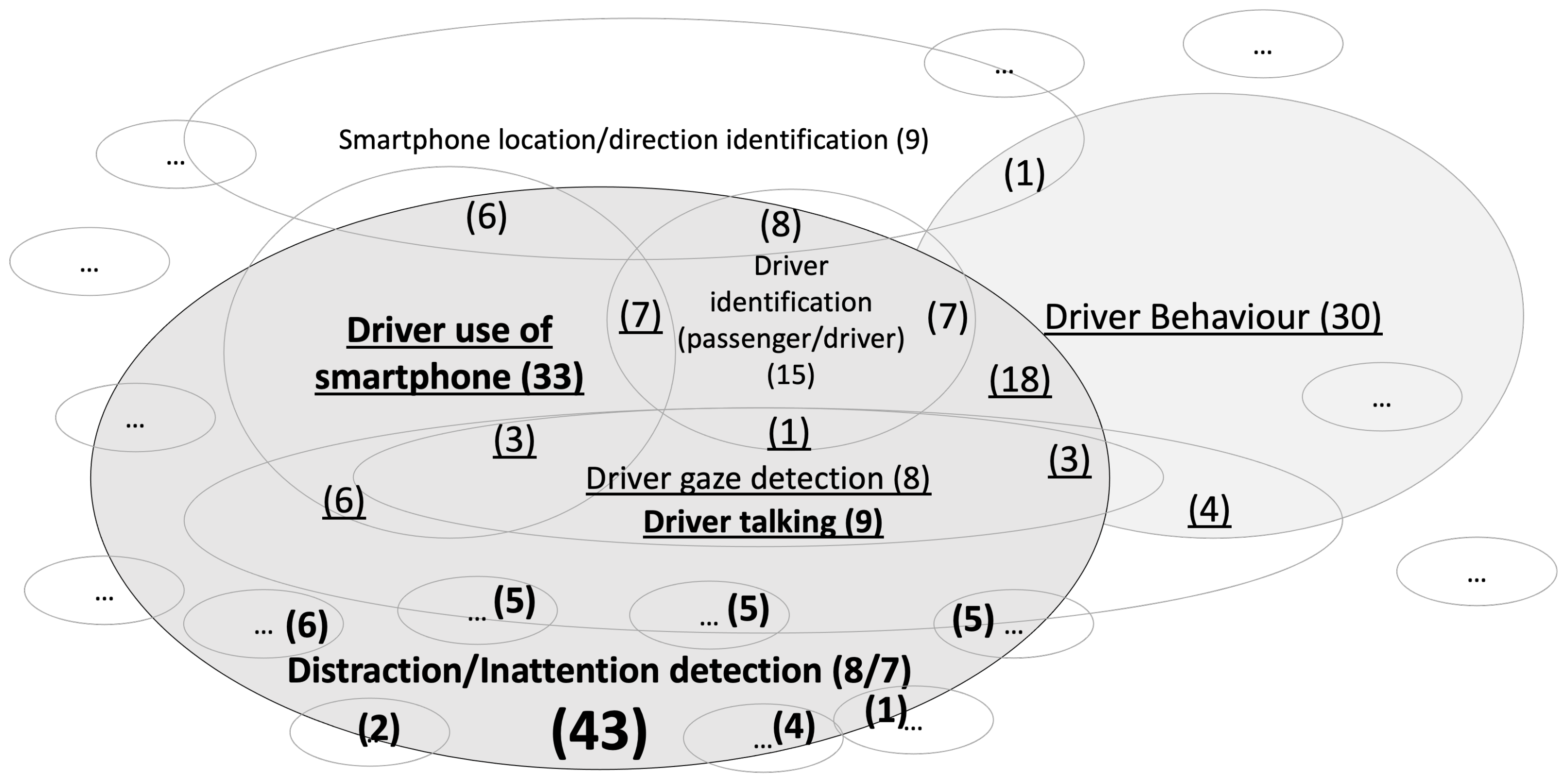
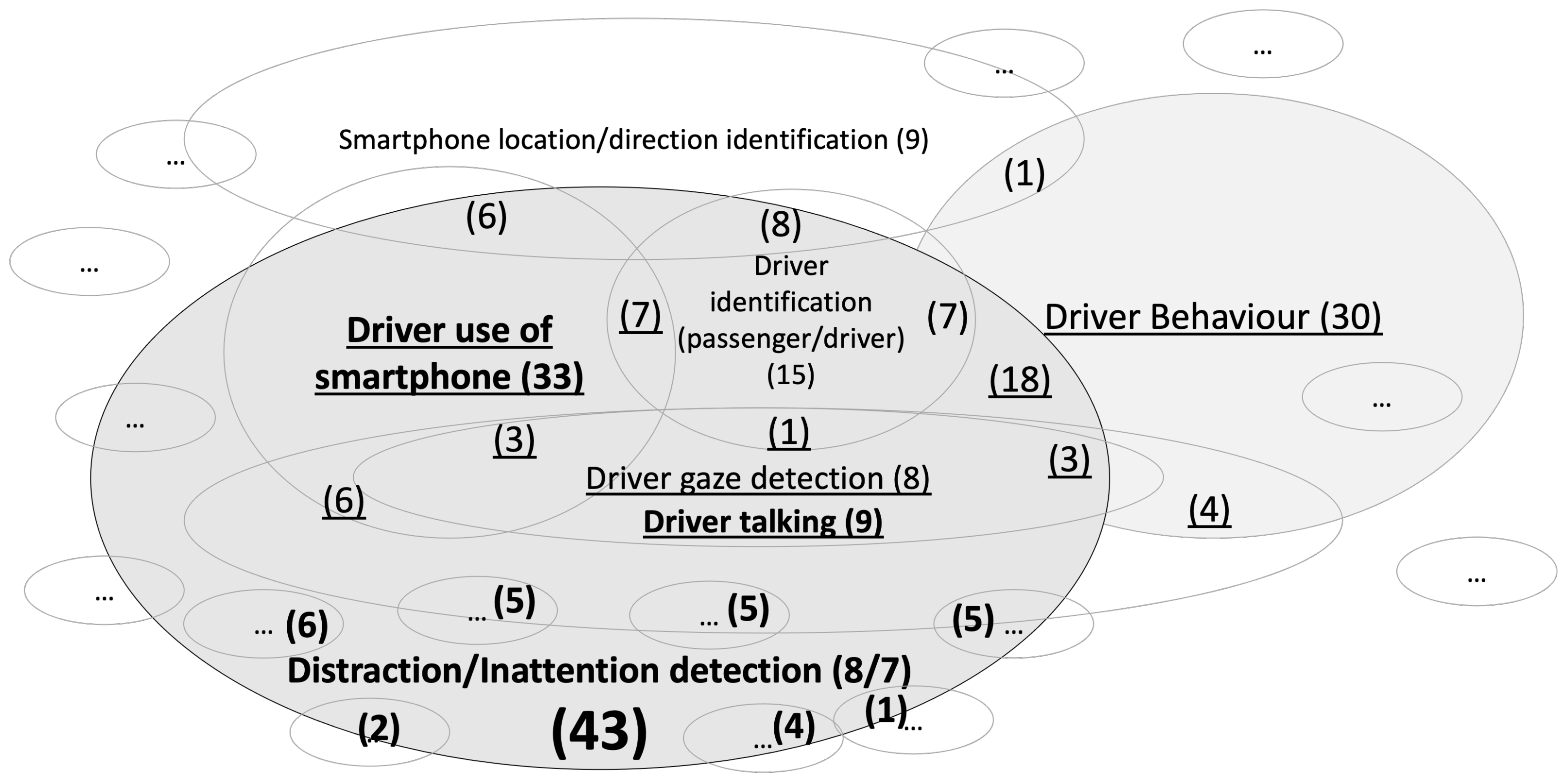
4.2. Aggregated Results: Smartphone-Based Approaches for Driver Distraction Detection
4.3. Aggregated Results: Smartphone-Based Sensors and Detection Methods
- The smartphone camera (front and/or rear camera) to collect images or videos;
- Data from a GNSS (global navigation satellite system, often the US-developed Global Positioning System is used) to collect position data or to calculate vehicle speed;
- Data from the inertial measurement unit (IMU) of the smartphone, which usually includes an accelerometer, a gyroscope, and, in some cases, a magnetometer;
- Smartphone microphones to collect sound data;
- Different types of radio signals from the smartphone, e.g., WiFi signals or the radio signal connection between the smartphone and the base station/base transceivers.
| Author(s) | CAM | GNSS | IMU | MIC | RAD |
|---|---|---|---|---|---|
| Ahn et al., 2017 [65] | X | ||||
| Ahn et al., 2019 [66] | X | ||||
| Albert et al., 2016 [67] | |||||
| Alqudah et al., 2021 [68] | X | ||||
| Baheti et al., 2018 [69] | X | ||||
| Bergasa et al., 2014 [54] | X | X | X | X | |
| Berri et al., 2014 [71] | X | ||||
| Bo et al., 2013b [72] | X | X | |||
| Bortnik and Lavrenovs, 2021 [73] | |||||
| Caird et al., 2014 [74] | |||||
| Castignani et al., 2015 [75] | X | ||||
| Chen et al., 2015 [76] | X | X | |||
| Chu et al., 2014 [77] | X | X | |||
| Chuang et al., 2014 [78] | X | ||||
| Dai et al., 2019 [79] | X | ||||
| Dua et al., 2019a [49] | X | ||||
| Dua et al., 2019b [49] | X | ||||
| Eraqi et al., 2019 [50] | X | ||||
| Gelmini et al., 2020 [46] | X | X | |||
| He et al., 2014 [80] | X | ||||
| Hong et al., 2014 [81] | X | X | |||
| Janveja et al., 2020 [52] | X | ||||
| Jiao et al., 2021 [82] | X | ||||
| Johnson et al., 2011 [83] | X | X | X | ||
| Kapoor et al., 2020 [48] | X | ||||
| Kashevnik et al., 2021 [5] | X | X | |||
| Khurana and Goel, 2020 [84] | X | ||||
| Koukoumidis et al., 2011 [85] | X | X | X | ||
| Li et al., 2019 [86] | X | X | X | ||
| Lindqvist and Hong, 2011 [87] | |||||
| Liu et al., 2017 [88] | X | X | X | ||
| Ma et al., 2017 [89] | X | X | X | ||
| Mantouka et al., 2019 [90] | X | X | |||
| Mantouka et al., 2022 [91] | X | X | |||
| Meiring et al., 2015 [92] | |||||
| Meng et al., 2015 [93] | X | X | |||
| Mihai et al., 2015 [53] | X | ||||
| Nambi et al., 2018 [94] | X | ||||
| Omerustaoglu et al., 2020 [51] | X | X | |||
| Othman et al., 2022 [95] | X | X | X | ||
| Pargal et al., 2022 [96] | X | ||||
| Park et al., 2018 [97] | X | ||||
| Paruchuri and Kumar, 2015 [63] | X | ||||
| Punay et al., 2018 [98] | X | ||||
| Qi et al., 2019a [99] | X | X | X | ||
| Qi et al., 2019b [100] | X | X | X | X | |
| Rachmadi et al., 2021 [101] | X | ||||
| Shabeer and Wahidabanu, 2012 [62] | X | ||||
| Singh et al., 2014 [102] | X | ||||
| Song et al., 2016 [64] | X | ||||
| Torres et al., 2019 [103] | X | X | |||
| Tortora et al., 2023 [104] | X | X | X | ||
| Tselentis et al., 2021 [105] | X | X | |||
| Wang et al., 2016 [106] | X | ||||
| Vasey et al., 2018 [107] | X | X | |||
| Vlahogianni and Barmpounakis, 2017 [108] | X | X | |||
| Woo and Kulic, 2016 [109] | X | X | |||
| Xiao and Feng, 2016 [111] | X | ||||
| Xie and Zhu, 2019 [110] | X | X | |||
| Xie et al., 2018 [112] | X | X | |||
| Xie et al., 2019 [113] | X | X | |||
| Yang et al., 2012 [114] | X | ||||
| Yaswanth et al., 2021 [115] | X | X | |||
| You at al., 2013 [116] | X | X | X | ||
| Ziakopoulos et al., 2023 [117] | X | X | X | ||
| Total | 27 | 26 | 37 | 12 | 3 |
4.4. Aggregated Results: Summary of Tangible Results
| Author(s) | Objective | Analysis Methods | Results |
|---|---|---|---|
| Ahn et al., 2017 [65] | Detect when a person is about to enter a vehicle by analysing the movement trajectory of the smartphone | Fuzzy Inference System, electromagnetic field (EMF) fluctuations | 91.1% to 94.0% accuracy; maintains at least 87.8% accuracy regardless of smartphone position and vehicle type |
| Ahn et al., 2019 [66] | Classify users into drivers and passengers and whether they have entered a vehicle | Bayesian classifier | Identifies the driver’s smartphone with 89.1% average accuracy |
| Albert et al., 2016 [67] | Identify smartphone apps that have the greatest potential to reduce risky driving behaviour | Apps mapping, Analytic Hierarchy Process (APH) | Texting prevention and Green Box are unlikely to be accepted and used; collision warning and voice control are expected to gain public support |
| Alqudah et al., 2021 [68] | Classify driving events such as high speed, low speed, stop, and U-turn using smartphone sensors | SVM, decision trees, Discriminate Analysis, Naïve Bayes, KNN, ensembles | Classify events with over 98% accuracy using decision trees |
| Baheti et al., 2018 [69] | Detect distracted drivers and the type of distraction, such as texting, talking on a mobile phone, eating, or drinking | CNN (VGG-16 architecture) | 94.44% accuracy on test set; adding dropout, L2 weight regularisation, and batch normalisation increases accuracy to 96.31% on test set |
| Bergasa et al., 2014 [54] | Detect inattentive driving and provide feedback to the driver, assessing their driving and warning them if their behaviour is unsafe | Drowsiness score uses lane drifting and lane weaving signals to infer drowsiness; distraction score based on sudden longitudinal and lateral movements | Data from 12 drivers in two different studies; detects some inattentive driving behaviours and achieves an overall accuracy of 82% with a recall of 92% |
| Berri et al., 2014 [71] | Present an algorithm for extracting features from images to detect the use of mobile phones by drivers | Computer vision and machine learning (SVM for classification) | Average accuracy of 91.57% for the set of images analysed |
| Bo et al., 2013b [72] | Detect drivers and passengers, and whether a smartphone is being used for texting | Classification with hidden Markov model (HMM) | Classification accuracy of 87% and precision of 96.67% across 20 different driving and parking cases |
| Bortnik and Lavrenovs, 2021 [73] | Identify the driver’s interaction with the smartphone, such as app activity, call activity, or screen activity | Android dumpsys diagnostic data | N/A |
| Caird et al., 2014 [74] | Presents a meta-study on texting and driving | N/A | N/A |
| Castignani et al., 2015 [75] | Detect events related to driving style and scores drivers | Fuzzy logic, principal component analysis (PCA) | The developed system shows more than 90% accuracy in detecting events in an experiment with 10 drivers along a predefined route |
| Chen et al., 2015 [76] | Detect and differentiate between different vehicle steering patterns, such as lane changes, turns, and driving on winding roads | Signal processing, Kalman filter | High detection accuracy: 100% for right and left turns, 93% for lane changes, 97% for curvy roads |
| Chu et al., 2014 [77] | Detect whether a smartphone user in a vehicle is the driver or a passenger | Machine learning approach | Early prototypes on Android and iOS show over 85% accuracy with 6 users in 2 different cars |
| Chuang et al., 2014 [78] | Estimate driver gaze direction to detect driver distraction | Multi-class linear support vector machine (SVM) classifier | Classification accuracy between 86.4% and 97.4%. |
| Dai et al., 2019 [79] | Identification of the driver’s direction of speech (namely, front, right, and rear) | K-means clustering algorithm | 95% accuracy on average for different phone placements, at least 92.2% accuracy for three scenarios, 90.3% accuracy when the window is open in the presence of outside noise |
| Author(s) | Objective | Analysis Methods | Results |
|---|---|---|---|
| Dua et al., 2019a [49] | Detect and assess driver attention using the front camera of a windscreen-mounted smartphone | Neuronal networks, CNNs, and GRUs | The driver’s attention rating had an overall agreement of 0.87 with the ratings of 5 human annotators |
| Dua et al., 2019b [49] | Identify driver distraction based on facial characteristics (head position, eye gaze, eye closure, and yawning) | CNN (generic features) and GRU or (CNN + GRU) | The automatically generated rating has an overall agreement of 88% with the ratings provided by 5 human annotators; the attention-based model outperforms the AUTORATE model by 10% accuracy on the extended dataset |
| Eraqi et al., 2019 [50] | Detect 10 different types of driver distraction (including talking to passengers, phone calls, and texting) | Deep learning; ensemble of convolutional neural networks | New public dataset, detection with 90% accuracy |
| Gelmini et al., 2020 [46] | Driving style risk assessment based on speeding, longitudinal acceleration, lateral acceleration, and smartphone use while driving | Thresholds used for profiling drivers and detecting smartphone usage | Median phone usage, no accuracy indicators used |
| He et al., 2014 [80] | Present a seat-level location of smartphones in a vehicle to identify who is sitting where | Signal processing: reference frame transformation, event detection, left/right identification, front/back identification | Position accuracy between 70% and 90% (best case) |
| Hong et al., 2014 [81] | Detect a person’s driving behaviour via an Android-based in-vehicle sensor platform | Machine learning approach (Naïve Bayes classifier) | Average model accuracy with all three sensors was 90.5%, and 66.7% with the smartphone only |
| Janveja et al., 2020 [52] | Introduce a smartphone-based system to detect driver fatigue and distraction (mirror scanning behaviour) in low-light conditions | For distraction detection, statistics are calculated if the driver is scanning their mirrors at least once every 10 s continuously during the drive | NIR LED setup: 93.8% accuracy in detecting driver distraction |
| Jiao et al., 2021 [82] | Recognise actions of distracted drivers | Hybrid deep learning model, OpenPose, K-means, LSTM | Accuracy depending on processing step (up to 92%) |
| Johnson et al., 2011 [83] | Detect and classify driving events, such as left/right manoeuvres, turns, lane changes, device removal, and excessive speed and braking | Manoeuvre classification with the DTW algorithm | U-turn correctly identified 23% of the time (using accelerometer), 46% of the time (using gyroscope), 77% of the time (combined sensors), 97% of aggressive events correctly identified |
| Kapoor et al., 2020 [48] | Provide a real-time driver distraction detection system that detects distracting tasks in driver images | Convolutional neural networks (CNNs) | Accuracy for 4 classes (e.g., calling or texting on a cell phone) reaches 98–100% when fine-tuned with datasets such as the State Farm Distracted Driver Dataset |
| Kashevnik et al., 2021 [5] | Provide an audio-visual speech recognition corpus for use in speech recognition for driver monitoring systems | Corpus creation, development of smartphone app | Corpus (audio-visual speech database with list of phrases in Russian language, 20 participants) |
| Khurana and Goel, 2020 [84] | Detect smartphone use by drivers using in-device cameras | Random forest classifiers (machine learning models) for 2 scenarios: a) docked, b) in-hand | Approximately 90% accuracy in distinguishing between driver and passenger. Cannot collect data for phones in handheld position |
| Koukoumidis et al., 2011 [85] | Detect traffic lights using the smartphone camera and predict their timing | Machine learning (Support Vector Regression) | Accuracy of traffic signal detection (87.6% and 92.2%) and schedule prediction (0.66 s, for pre-timed traffic signals; 2.45 s for traffic-adaptive traffic signals) |
| Author(s) | Objective | Analysis Methods | Results |
|---|---|---|---|
| Li et al., 2019 [86] | Introduce the WisDriver system, which detects 15 different dangerous driving behaviours | Multiple approaches for signal processing (sliding window, mean absolute deviation): PCA, DTW, discrete wavelet transform (DWT) | CSI plus sensor can achieve up to 92% detection accuracy |
| Lindqvist and Hong, 2011 [87] | Conduct user interaction research to design driver-friendly smartphone applications that do not distract the driver | Interaction designs (no analysis) | Initial interaction designs for Android apps |
| Liu et al., 2017 [88] | Recognition of internal driver inputs (e.g., steering wheel angle, vehicle speed, and acceleration) and external perceptions of the road environment (e.g., road conditions and front view video) | Signal processing, filtering approaches, deep neural networks | Estimate steering wheel angle with an average error of 0.69, infer vehicle speed with an error of 0.65 km/h, and estimate binary road conditions with 95% accuracy |
| Ma et al., 2017 [89] | Propose a scheme to identify three dangerous driving behaviours, speeding, irregular change in direction and abnormal speed control | Coordinate reorientation, sensor error estimation, data correction, speed estimation, turn-signal identification | Kalman filter approach: average precision and recall for direction change and abnormal speed detection are 93.95% and 90.54%, respectively, |
| Mantouka et al., 2022 [91] | Identify unsafe driving styles and provide personalised driving recommendations | Two-stage K-means clustering | Summary statistics on collected trip data |
| Mantouka et al., 2019 [90] | Identify driver safety profiles from smartphone data and distinguish normal driving from unsafe driving | Unsupervised learning: two-stage K-means clustering approach | 7.5% of the trips are characterised by distracted driving |
| Meiring et al., 2015 [92] | Review solutions and approaches to driving style analysis to identify relevant ML and AI algorithms | N/A | N/A |
| Meng et al., 2015 [93] | Develop a system that extends the driver’s view in all directions by using cameras from multiple cooperating smartphones in surrounding vehicles | Image processing | System detects a vehicle within 111 ± 60 ms |
| Mihai et al., 2015 [53] | Develop a system to determine the orientation of the driver’s head to infer visual attention | Image processing (OpenCV) | Feasibility tests in two scenarios, no numbers given |
| Nambi et al., 2018 [94] | Develop a windscreen-mounted, smartphone-based system to monitor driving behaviour (including driver states) | Android app: uses OpenCV, TensorFlow, and custom libraries (DNN and SVM) | Demonstration case, no further information provided by the authors |
| Omerustaoglu et al., 2020 [51] | Introduce a two-stage driver distraction detection system that integrates vehicle sensor data into a vision-based distraction detection model | CNN, LSTM-RNN on sensor and image data together; model tuning and transfer learning (from StateFarm to own dataset) | Increased overall accuracy to 85% compared to using only image data. Increased driver detection accuracy to 85% using sensor data. |
| Othman et al., 2022 [95] | Introduction of a driver state identification dataset synchronised with vehicle telemetry data | Dataset provision, unsupervised learning approach (K-means) | Clustered, labelled dataset |
| Pargal et al., 2022 [96] | Present an approach to detecting whether a smartphone is being used by the driver | Spectral analysis, power analysis of noise features, acoustic-based smartphone localisation | F1 scores from 0.75 to 0.875 for different smartphone placement scenarios |
| Author(s) | Objective | Analysis Methods | Results |
|---|---|---|---|
| Park et al., 2018 [97] | Detect the location and direction of the driver’s phone, as well as in-car activities, such as walking towards the vehicle, standing near the vehicle while opening a door, and starting the engine | Electromagnetic field (EMF) fluctuations are analysed | The driver’s phone was identified with 83–93% true positive rate and achieved 90–91% true negative rate |
| Paruchuri and Kumar, 2015 [63] | Detects smartphone location and distinguishes drivers from passengers | Image comparison (angle difference) with reference images for the localisation of the smartphone (driver’s seat vs. passenger seats), based on the distance between images | 15 out of 38 images were registered incorrectly |
| Punay et al., 2018 [98] | Focus on a safer driving experience by providing an Android application for non-distracted driving | Thresholds are used, i.e., the system detects if the speed is higher than a certain threshold | N/A |
| Prototype only | |||
| Qi et al., 2019a [99] | Detect in-car human activity, such as chatting, and contextual information (clear vs. crowded) based on vehicle dynamics (braking and turning) | Convolutional neural network (CNN) for the audio | Average accuracy of 90% across 7 different activities |
| Qi et al., 2019b [100] | Classify driving events, such as turning, braking, and lane changes, using sensor data, while cameras and microphones are used to identify objects in front view and blind spots and estimate head position | Deep learning inference (Nvidia TensorRT) | Average of 90% event detection accuracy |
| Rachmadi et al., 2021 [101] | Present a driver abnormal behaviour classification system | Enhanced multi-layer perceptron (MLP) | 97,5% accuracy and 45 ms processing time |
| Shabeer and Wahidabanu, 2012 [62] | Detect driver phone calls | Threshold value cutoff of the receiving RF signal | N/A |
| Singh et al., 2014 [102] | Blind spot vehicle detection | Two approaches: intensity variation and contour matching | Detect and alert the driver with 87% accuracy |
| Song et al., 2016 [64] | Detect driver phone calls | Similarity based on threshold: voice feature model | TPR is over 98% for 3 different evaluated passenger positions, over 90% with noise impact, 80% when three people are talking, and 67% when 4 people are talking |
| Torres et al., 2019 [103] | Use data from smartphone sensors to distinguish between driver and passenger when reading a message in a vehicle | Machine learning (various models): three eager learners (SVM: DT, LR), three ensemble learners (RF, ADM, GBM), and one deep learning model (CNN) | Performance values accuracy, precision, recall, F1, and Kappa: CNN and GB models had the best performance |
| Tortora et al., 2023 [104] | Develop Android application to detect distracted driving behaviour | Distraction score based on different distraction activities and detection methods | Application presentation (no KPIs) |
| Tselentis et al., 2021 [105] | Driving behaviour analysis using smartphone sensors to provide driver safety scores and driver clustering | K-means driver clustering (based on event compute in a trip such as phone use, speeding, harsh braking, etc.) | Descriptive statistics, definition of driver characteristics for each cluster (moderate, unstable, cautious drivers) |
| Wang et al., 2016 [106] | Present an approach based on smartphone sensing of vehicle dynamics to determine driver phone use | Signal processing: compute centripetal acceleration using smartphone sensors and compare to those measured by a simple plug-in reference module | Approach achieves close to 90% accuracy with only a few with less than 3% FPR |
| Vasey et al., 2018 [107] | Driver emotional arousal detection | Machine learning classifier (decision tree, SVM, NN) | N/A, concept only |
| Author(s) | Objective | Analysis Methods | Results |
|---|---|---|---|
| Vlahogianni and Barmpounakis, 2017 [108] | Detect driving events such as braking, acceleration, left and right cornering | Rough set theory and own classifier (MODLEM), compared to MLP, C4.5 decision trees, and ZeroR | Smartphone accuracy is 99.4% and OBD-II device accuracy is 99.3%; TPRs are 88% and 86% and FPRs are 0.3% and 0.4% for smartphone and OBD-II device, respectively, |
| Woo and Kulic, 2016 [109] | Propose a classifier-based approach for driving manoeuvre recognition from mobile phone data | SVM classifier, PCA | Average precision of 0.8158 and average recall of 82%. Balanced accuracy of 88%. |
| Xiao and Feng, 2016 [111] | Driver attention detection with 2 modules: a) gaze detection and b) road motion objects detection | Linear SVM classifier (module a); Lucas–Kanade optical flow with dynamic background compensation (module b) | 93% accuracy for gaze estimation and 91.7% overall accuracy |
| Xie and Zhu, 2019 [110] | Manoeuvre-based driving behaviour (lane changing or turning) and classification amongst three labels (normal, drowsy, and aggressive) | ReliefF, random forest | Average F1 score of 70.47% using leave-one-driver-out validation |
| Xie et al., 2018 [112] | Classification of driving manoeuvres (i.e., braking, turning, stopping, accelerating, decelerating, lane changing) based on different feature extraction methods | Random forest classifier | F1 scores of 68%, 80%, and 87% on three different datasets |
| Xie et al., 2019 [113] | Driver distraction detection | Ensemble method of 4 classifiers: K-NN, Logistic Regression, Gaussian Naive Bayes, random forest | 87% accuracy in distraction detection |
| Yang et al., 2012 [114] | Distinguish between passengers and drivers using smartphones by classifying the position of the smartphone | Threshold-based classification | Accuracy with calibrated thresholds: detection rate is over 90% and accuracy is around 95% |
| Yaswanth et al., 2021 [115] | Smartphone detection (classifier) and drivers’ action detection | N/A | N/A |
| You et al., 2013 [116] | Detect if drivers are tired or distracted (drowsy driving, inattentive driving) and identify various driving conditions such as tailgating, lane weaving, or drifting | Computer vision and machine learning (decision trees and SVM) | Precision and recall for face direction events: precisions are 68% for facing left, 79% for facing right, and 92% for eye state classification |
| Ziakopoulos et al., 2023 [117] | Investigate influence factors for driver distraction through smartphone use | 230-driver experiment using the developed driving recording application and feedback questionnaire, XGBoost for distraction investigation | Deducted influence factors for driver phone use |
| List of Journals | No. of Papers |
|---|---|
| Sensors (Switzerland) | 7 |
| Accident Analysis and Prevention | 3 |
| IEEE Transactions on Biometrics, Behaviour, and Identity Science | 3 |
| International Journal of Interactive Mobile Technologies | 2 |
| Transportation Research Part C: Emerging Technologies | 2 |
| Advances in Intelligent Systems and Computing | 1 |
| Applied Soft Computing Journal | 1 |
| Data | 1 |
| IEEE Access | 1 |
| IEEE Intelligent Transportation Systems Magazine | 1 |
| IEEE Sensors Journal | 1 |
| IEEE Transactions on Intelligent Transportation Systems | 1 |
| IEEE Transactions on Mobile Computing | 1 |
| Journal of Advanced Transportation | 1 |
| Lecture Notes in Electrical Engineering | 1 |
| Lecture Notes of the Institute for Computer Sciences, Social-Informatics | 1 |
| and Telecommunications Engineering | |
| Mobile Information Systems | 1 |
| Procedia Engineering | 1 |
| Proceedings of the ACM on Interactive, Mobile, Wearable and | 1 |
| Ubiquitous Technologies | |
| Safety Science | 1 |
| Transport Policy | 1 |
| Total (Percentage) | 33 (51%) |
| List of Conferences | No. of Papers |
|---|---|
| International Conference on Mobile Systems, Applications and Services | 4 |
| Conference on Human Factors in Computing Systems | 2 |
| IEEE Intelligent Vehicles Symposium | 2 |
| International Conference on Computing, Networking and Communications | 2 |
| International Conference on Mobile Computing and Networking | 2 |
| IEEE Computer Society Conference on Computer Vision | 1 |
| and Pattern Recognition Workshops | |
| IEEE Conference on Intelligent Transportation Systems | 1 |
| IEEE International Conference on Automatic Face and Gesture Recognition | 1 |
| IEEE International Conference on Computer Communications | 1 |
| IEEE International Conference on Mobile Ad Hoc and Smart Systems | 1 |
| IEEE International Conference on Systems, Man, and Cybernetics | 1 |
| IEEE Pacific Rim Conference on Communications, Computers | 1 |
| and Signal Processing | |
| IEEE Vehicular Networking Conference | 1 |
| International ACM Conference on Automotive User Interfaces | 1 |
| and Interactive Vehicular Applications | |
| International Conference on Advanced Information Networking | 1 |
| and Applications | |
| International Conference on Communication Systems and Networks | 1 |
| International Conference on Computer Vision Theory and Applications | 1 |
| International Conference on Information, Intelligence, Systems | 1 |
| and Applications | |
| International Conference on Intelligent Transport Systems | 1 |
| International Conference on Neural Computation, Fuzzy Systems | 1 |
| and Knowledge Discovery | |
| International Conference on Mobile Data Management | 1 |
| International Conference on Orange Technologies | 1 |
| International Conference on Transportation Information and Safety | 1 |
| International Electronics Symposium | 1 |
| Workshop on Mobile Computing Systems and Applications | 1 |
| Total (percentage) | 32 (49%) |
5. Discussion
6. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Olson, R.L.; Hanowski, R.J.; Hickman, J.S.; Bocanegra, J. Driver Distraction in Commercial Vehicle Operations; Technical Report; United States Department of Transportation. Federal Motor Carrier Safety: Washington, DC, USA, 2009.
- Young, K.; Regan, M.; Hammer, M. Driver distraction: A review of the literature. Distracted Driv. 2007, 2007, 379–405. [Google Scholar]
- Dong, Y.; Hu, Z.; Uchimura, K.; Murayama, N. Driver inattention monitoring system for intelligent vehicles: A review. IEEE Trans. Intell. Transp. Syst. 2010, 12, 596–614. [Google Scholar] [CrossRef]
- Lechner, G.; Fellmann, M.; Festl, A.; Kaiser, C.; Kalayci, T.E.; Spitzer, M.; Stocker, A. A lightweight framework for multi-device integration and multi-sensor fusion to explore driver distraction. In Proceedings of the International Conference on Advanced Information Systems Engineering, Amsterdam, The Netherlands, 8–12 June 2009; Springer: Berlin/Heidelberg, Germany, 2019; pp. 80–95. [Google Scholar]
- Kashevnik, A.; Lashkov, I.; Axyonov, A.; Ivanko, D.; Ryumin, D.; Kolchin, A.; Karpov, A. Multimodal Corpus Design for Audio-Visual Speech Recognition in Vehicle Cabin. IEEE Access 2021, 9, 34986–35003. [Google Scholar] [CrossRef]
- Lee, J.D.; Young, K.L.; Regan, M.A. Defining driver distraction. Driv. Distraction Theory Eff. Mitig. 2008, 13, 31–40. [Google Scholar]
- Stutts, J.C.; Reinfurt, D.W.; Rodgman, E.A. The role of driver distraction in crashes: An analysis of 1995–1999 Crashworthiness Data System Data. Annu. Proc. Assoc. Adv. Automot. Med. 2001, 45, 287–301. [Google Scholar]
- Née, M.; Contrand, B.; Orriols, L.; Gil-Jardiné, C.; Galéra, C.; Lagarde, E. Road safety and distraction, results from a responsibility case-control study among a sample of road users interviewed at the emergency room. Accid. Anal. Prev. 2019, 122, 19–24. [Google Scholar] [CrossRef] [PubMed]
- Foley, J.P.; Young, R.; Angell, L.; Domeyer, J.E. Towards Operationalizing Driver Distraction; University of Iowa: Iowa City, IA, USA, 2013; pp. 57–63. [Google Scholar] [CrossRef]
- World Health Organization. Mobile Phone Use: A Growing Problem Of driver Distraction; World Health Organization: Geneva, Switzerland, 2011. [Google Scholar]
- Choudhary, P.; Velaga, N.R. Modelling driver distraction effects due to mobile phone use on reaction time. Transp. Res. Part C Emerg. Technol. 2017, 77, 351–365. [Google Scholar] [CrossRef]
- Ortiz, C.; Ortiz-Peregrina, S.; Castro, J.J.; Casares-López, M.; Salas, C. Driver distraction by smartphone use (WhatsApp) in different age groups. Accid. Anal. Prev. 2018, 117, 239–249. [Google Scholar] [CrossRef] [PubMed]
- Kutila, M.; Jokela, M.; Markkula, G.; Rué, M.R. Driver distraction detection with a camera vision system. In Proceedings of the 2007 IEEE International Conference on Image Processing, San Antonio, TX, USA, 16–19 September 2007; IEEE: Manhattan, NY, USA, 2007; Volume 6, pp. VI-201–VI-204. [Google Scholar]
- Lindow, F.; Kaiser, C.; Kashevnik, A.; Stocker, A. AI-Based Driving Data Analysis for Behavior Recognition in Vehicle Cabin. In Proceedings of the 2020 27th Conference of Open Innovations Association (FRUCT), Trento, Italy, 7–9 September 2020; IEEE: Manhattan, NY, USA, 2020; pp. 116–125. [Google Scholar]
- Tango, F.; Botta, M. Real-time detection system of driver distraction using machine learning. IEEE Trans. Intell. Transp. Syst. 2013, 14, 894–905. [Google Scholar] [CrossRef]
- Koesdwiady, A.; Soua, R.; Karray, F.; Kamel, M.S. Recent trends in driver safety monitoring systems: State of the art and challenges. IEEE Trans. Veh. Technol. 2016, 66, 4550–4563. [Google Scholar] [CrossRef]
- El Khatib, A.; Ou, C.; Karray, F. Driver inattention detection in the context of next-generation autonomous vehicles design: A survey. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4483–4496. [Google Scholar] [CrossRef]
- Stocker, A.; Kaiser, C.; Fellmann, M. Quantified Vehicles: Novel Services for Vehicle Lifecycle Data. Bus. Inf. Syst. Eng. 2017, 59, 125–130. [Google Scholar] [CrossRef]
- Kaiser, C.; Stocker, A.; Viscusi, G.; Fellmann, M.; Richter, R. Conceptualising Value Creation in Data-driven Services: The Case of Vehicle Data. Int. J. Inf. Manag. 2021, 59, 102335. [Google Scholar] [CrossRef]
- Kashevnik, A.; Lashkov, I.; Ponomarev, A.; Teslya, N.; Gurtov, A. Cloud-based driver monitoring system using a smartphone. IEEE Sens. J. 2020, 20, 6701–6715. [Google Scholar] [CrossRef]
- Lee, B.G.; Chung, W.Y. A smartphone-based driver safety monitoring system using data fusion. Sensors 2012, 12, 17536–17552. [Google Scholar] [CrossRef]
- Engelbrecht, J.; Booysen, M.J.; van Rooyen, G.J.; Bruwer, F.J. Survey of smartphone-based sensing in vehicles for intelligent transportation system applications. IET Intell. Transp. Syst. 2015, 9, 924–935. [Google Scholar] [CrossRef]
- Kaiser, C.; Stocker, A.; Papatheocharous, E. Distracted driver monitoring with smartphones: A preliminary literature review. In Proceedings of the 2021 29th Conference of Open Innovations Association (FRUCT), Tampere, Finland, 12–14 May 2021; IEEE: Manhattan, NY, USA, 2021; pp. 169–176. [Google Scholar]
- Oviedo-Trespalacios, O.; Haque, M.M.; King, M.; Washington, S. Understanding the impacts of mobile phone distraction on driving performance: A systematic review. Transp. Res. Part C Emerg. Technol. 2016, 72, 360–380. [Google Scholar] [CrossRef]
- Manfreda, A.; Ljubi, K.; Groznik, A. Autonomous vehicles in the smart city era: An empirical study of adoption factors important for millennials. Int. J. Inf. Manag. 2021, 58, 102050. [Google Scholar] [CrossRef]
- Kalayci, T.E.; Ozegovic, G.; Bricelj, B.; Lah, M.; Stocker, A. Object detection in driving datasets using a high-performance computing platform: A benchmark study. IEEE Access 2022, 10, 61666–61677. [Google Scholar] [CrossRef]
- Stocker, A.; Lechner, G.; Kaiser, C.; Fellmann, M. Digitalized Mobility. In Proceedings of the Americas Conference on Information Systems, Virtual Event, 20–28 August 2021. [Google Scholar]
- Lechte, H.; Menck, J.H.D.; Stocker, A.; Lembcke, T.B.; Kolbe, L.M. Exploring threat-specific privacy assurances in the context of connected vehicle applications. In Proceedings of the European Conference on Information System, Kristiansand, Norway, 11–16 June 2023. [Google Scholar]
- Kalayci, T.E.; Kalayci, E.G.; Lechner, G.; Neuhuber, N.; Spitzer, M.; Westermeier, E.; Stocker, A. Triangulated investigation of trust in automated driving: Challenges and solution approaches for data integration. J. Ind. Inf. Integr. 2021, 21, 100186. [Google Scholar] [CrossRef]
- Stocker, A. Driver Trust in Automated Driving Systems. In Proceedings of the European Conference on Information Systems (ECIS) 2022, Timisoara, Romania, 18–24 June 2022. [Google Scholar]
- Kanwal, K.; Rustam, F.; Chaganti, R.; Jurcut, A.D.; Ashraf, I. Smartphone Inertial Measurement Unit Data Features for Analyzing Driver Driving Behavior. IEEE Sens. J. 2023, 23, 11308–11323. [Google Scholar] [CrossRef]
- Kashevnik, A.; Shchedrin, R.; Kaiser, C.; Stocker, A. Driver distraction detection methods: A literature review and framework. IEEE Access 2021, 9, 60063–60076. [Google Scholar] [CrossRef]
- Regan, M.A.; Hallett, C. Driver distraction: Definition, mechanisms, effects, and mitigation. In Handbook of Traffic Psychology; Elsevier Inc.: Amsterdam, The Netherlands, 2011; pp. 275–286. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. Finding factors and vehicles involved in two-vehicle accidents through the use of social network analysis. In Proceedings of the 2017 IEEE/ACM International Conference on Advances in Social Networks Analysis and Mining 2017, Sydney, Australia, 31 July–3 August 2017; pp. 541–546. [Google Scholar]
- Taylor, N.L.; Blenner, J.A. Attitudes and behaviors associated with young drivers’ texting and app use. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 326–339. [Google Scholar] [CrossRef]
- McBride, M.; Carter, L.; Phillips, B. Integrating the theory of planned behavior and behavioral attitudes to explore texting among young drivers in the US. Int. J. Inf. Manag. 2020, 50, 365–374. [Google Scholar] [CrossRef]
- Banks, V.A.; Plant, K.L.; Stanton, N.A. Driver error or designer error: Using the Perceptual Cycle Model to explore the circumstances surrounding the fatal Tesla crash on 7th May 2016. Saf. Sci. 2018, 108, 278–285. [Google Scholar] [CrossRef]
- Maier, C.; Mattke, J.; Pflügner, K.; Weitzel, T. Smartphone use while driving: A fuzzy-set qualitative comparative analysis of personality profiles influencing frequent high-risk smartphone use while driving in Germany. Int. J. Inf. Manag. 2020, 55, 102207. [Google Scholar] [CrossRef]
- Musicant, O.; Lotan, T.; Albert, G. Do we really need to use our smartphones while driving? Accid. Anal. Prev. 2015, 85, 13–21. [Google Scholar] [CrossRef] [PubMed]
- Luria, G. The mediating role of smartphone addiction on the relationship between personality and young drivers’ smartphone use while driving. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 203–211. [Google Scholar]
- Rolison, J.J.; Regev, S.; Moutari, S.; Feeney, A. What are the factors that contribute to road accidents? An assessment of law enforcement views, ordinary drivers’ opinions, and road accident records. Accid. Anal. Prev. 2018, 115, 11–24. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Shafiq, M.; Park, Y. Catastrophic factors involved in road accidents: Underlying causes and descriptive analysis. PLoS ONE 2019, 14, e0223473. [Google Scholar] [CrossRef]
- Terry, C.P.; Terry, D.L. Cell phone-related near accidents among young drivers: Associations with mindfulness. J. Psychol. 2015, 149, 665–683. [Google Scholar] [CrossRef]
- Kaiser, C.; Stocker, A.; Festl, A.; Lechner, G.; Fellmann, M. A Research Agenda for Vehicle Information Systems. In Proceedings of the European Conference on Information Systems (ECIS 2018), Portsmouth, UK, 23–28 June 2018. [Google Scholar]
- Levi-Bliech, M.; Kurtser, P.; Pliskin, N.; Fink, L. Mobile apps and employee behavior: An empirical investigation of the implementation of a fleet-management app. Int. J. Inf. Manag. 2019, 49, 355–365. [Google Scholar] [CrossRef]
- Gelmini, S.; Strada, S.C.; Tanelli, M.; Savaresi, S.M.; Biase, V. Online Assessment of Driving Riskiness via Smartphone-Based Inertial Measurements. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5555–55651. [Google Scholar] [CrossRef]
- Dumitru, A.I.; Girbacia, T.; Boboc, R.G.; Postelnicu, C.C.; Mogan, G.L. Effects of smartphone based advanced driver assistance system on distracted driving behavior: A simulator study. Comput. Hum. Behav. 2018, 83, 1–7. [Google Scholar] [CrossRef]
- Kapoor, K.; Pamula, R.; Murthy, S.V. Real-Time Driver Distraction Detection System Using Convolutional Neural Networks. In Proceedings of the Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2020; Volume 605, pp. 280–291. [Google Scholar] [CrossRef]
- Dua, I.; Nambi, A.U.; Jawahar, C.V.; Padmanabhan, V. AutoRate: How attentive is the driver? In Proceedings of the Proceedings—14th IEEE International Conference on Automatic Face and Gesture Recognition, FG 2019, Lille, France, 14–18 May 2019. [Google Scholar] [CrossRef]
- Eraqi, H.M.; Abouelnaga, Y.; Saad, M.H.; Moustafa, M.N. Driver distraction identification with an ensemble of convolutional neural networks. J. Adv. Transp. 2019, 2019, 4125865. [Google Scholar] [CrossRef]
- Omerustaoglu, F.; Sakar, C.O.; Kar, G. Distracted driver detection by combining in-vehicle and image data using deep learning. Appl. Soft Comput. J. 2020, 96, 106657. [Google Scholar] [CrossRef]
- Janveja, I.; Nambi, A.; Bannur, S.; Gupta, S.; Padmanabhan, V. InSight: Monitoring the State of the Driver in Low-Light Using Smartphones. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2020, 4, 1–29. [Google Scholar] [CrossRef]
- Mihai, D.; Dumitru, A.; Postelnicu, C.; Mogan, G. Video-based evaluation of driver’s visual attention using smartphones. In Proceedings of the IISA 2015—6th International Conference on Information, Intelligence, Systems and Applications, Corfu, Greece, 6–8 July 2015. [Google Scholar] [CrossRef]
- Bergasa, L.M.; Almeria, D.; Almazan, J.; Yebes, J.J.; Arroyo, R. DriveSafe: An app for alerting inattentive drivers and scoring driving behaviors. In Proceedings of the IEEE Intelligent Vehicles Symposium, Proceedings, Ypsilanti, MI, USA, 8–11 June 2014; pp. 240–245. [Google Scholar] [CrossRef]
- Pew Research Center. Mobile Technology and Home Broadband; Pew Research Center: Washington, DC, USA, 2019. [Google Scholar]
- Sarker, I.H. Context-aware rule learning from smartphone data: Survey, challenges and future directions. J. Big Data 2019, 6, 95. [Google Scholar] [CrossRef]
- Webster, J.; Watson, R.T. Analyzing the Past to Prepare for the Future: Writing a Literature Review. MIS Q. 2002, 26, xiii–xxiii. [Google Scholar]
- Okoli, C.; Schabram, K. A Guide to Conducting a Systematic Literature Review of Information Systems Research. 2010. Available online: http://sprouts.aisnet.org/10-26 (accessed on 24 August 2023).
- Rowe, F. What literature review is not: Diversity, boundaries and recommendations. Eur. J. Inf. Syst. 2014, 23, 241–255. [Google Scholar] [CrossRef]
- Kim, W.; Jung, W.S.; Choi, H.K. Lightweight driver monitoring system based on multi-task mobilenets. Sensors 2019, 19, 3200. [Google Scholar] [CrossRef]
- Saeed, H.; Saeed, T.; Tahir, M.; Uppal, M. Risky Driving Behavior Detection Using In-Vehicle WiFi Signals. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Shabeer, H.A.; Wahidabanu, R.S. Averting mobile phone use while driving and technique to locate the mobile phone used vehicle. In Proceedings of the Procedia Engineering, Krakow, Poland, 9–12 September 2012; Volume 30, pp. 623–630. [Google Scholar] [CrossRef]
- Paruchuri, V.; Kumar, A. Detecting driver distraction using smartphones. In Proceedings of the Proceedings—International Conference on Advanced Information Networking and Applications, AINA, Gwangiu, Republic of Korea, 24–27 March 2015; Institute of Electrical and Electronics Engineers Inc.: Manhattan, NY, USA, 2015; Volume 2015, pp. 468–475. [Google Scholar] [CrossRef]
- Song, T.; Cheng, X.; Li, H.; Yu, J.; Wang, S.; Bie, R. Detecting driver phone calls in a moving vehicle based on voice features. In Proceedings of the Proceedings—IEEE INFOCOM, San Francisco, CA, USA, 10–14 April 2016; Institute of Electrical and Electronics Engineers Inc.: Manhattan, NY, USA, 2016; Volume 2016. [Google Scholar] [CrossRef]
- Ahn, D.H.; Park, H.; Hwang, S.; Park, T. Reliable identification of vehicle-boarding actions based on fuzzy inference system. Sensors 2017, 17, 333. [Google Scholar] [CrossRef]
- Ahn, D.; Park, H.; Shin, K.; Park, T. Accurate driver detection exploiting invariant characteristics of smartphone sensors. Sensors 2019, 19, 2643. [Google Scholar] [CrossRef] [PubMed]
- Albert, G.; Musicant, O.; Oppenheim, I.; Lotan, T. Which smartphone’s apps may contribute to road safety? An AHP model to evaluate experts’ opinions. Transp. Policy 2016, 50, 54–62. [Google Scholar] [CrossRef]
- Alqudah, Y.; Sababha, B.; Qaralleh, E.; Yousseff, T. Machine Learning to Classify Driving Events Using Mobile Phone Sensors Data. 2021. Available online: ttps://www.learntechlib.org/p/218910/ (accessed on 24 August 2023).
- Baheti, B.; Gajre, S.; Talbar, S. Detection of distracted driver using convolutional neural network. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18– 22 June 2018; Volume 2018, pp. 1145–1151. [Google Scholar] [CrossRef]
- Abouelnaga, Y.; Eraqi, H.M.; Moustafa, M.N. Real-time distracted driver posture classification. arXiv 2017, arXiv:1706.09498. [Google Scholar]
- Berri, R.A.; Silva, A.G.; Parpinelli, R.S.; Girardi, E.; Arthur, R. A pattern recognition system for detecting use of mobile phones while driving. In Proceedings of the VISAPP 2014—Proceedings of the 9th International Conference on Computer Vision Theory and Applications, Lisbon, Portugal, 5–8 January 2014; Volume 2, pp. 411–418. [Google Scholar] [CrossRef]
- Bo, C.; Jian, X.; Li, X.Y.; Mao, X.; Wang, Y.; Li, F. You’re driving and texting: Detecting drivers using personal smart phones by leveraging inertial sensors. In Proceedings of the 19th Annual International Conference on Mobile Computing & Networking, New York, NY, USA, 30 September–4 October 2013; pp. 199–202. [Google Scholar]
- Bortnik, L.; Lavrenovs, A. Android Dumpsys Analysis to Indicate Driver Distraction. In Proceedings of the Lecture Notes of the Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering, LNICST; Springer: Cham, Switzerland, 2021; Volume 351, pp. 139–163. [Google Scholar] [CrossRef]
- Caird, J.K.; Johnston, K.A.; Willness, C.R.; Asbridge, M.; Steel, P. A meta-analysis of the effects of texting on driving. Accid. Anal. Prev. 2014, 71, 311–318. [Google Scholar] [CrossRef]
- Castignani, G.; Derrmann, T.; Frank, R.; Engel, T. Driver behavior profiling using smartphones: A low-cost platform for driver monitoring. IEEE Intell. Transp. Syst. Mag. 2015, 7, 91–102. [Google Scholar] [CrossRef]
- Chen, D.; Cho, K.T.; Han, S.; Jin, Z.; Shin, K.G. Invisible sensing of vehicle steering with smartphones. In Proceedings of the MobiSys 2015—Proceedings of the 13th Annual International Conference on Mobile Systems, Applications, and Services, Florence, Italy, 19–22 May 2015; Association for Computing Machinery, Inc.: New York, NY, USA, 2015; pp. 1–13. [Google Scholar] [CrossRef]
- Chu, H.; Raman, V.; Shen, J.; Kansal, A.; Bahl, V.; Choudhury, R.R. I am a smartphone and i know my user is driving. In Proceedings of the 2014 6th International Conference on Communication Systems and Networks, COMSNETS 2014, Bangalore, India, 6–10 January 2014. [Google Scholar] [CrossRef]
- Chuang, M.C.; Bala, R.; Bernal, E.A.; Paul, P.; Burry, A. Estimating gaze direction of vehicle drivers using a smartphone camera. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 23–28 June 2014; pp. 165–170. [Google Scholar] [CrossRef]
- Dai, H.; Liu, A.X.; Li, Z.; Wang, W.; Zhang, F.; Dong, C. Recognizing driver talking direction in running vehicles with a smartphone. In Proceedings of the Proceedings—2019 IEEE 16th International Conference on Mobile Ad Hoc and Smart Systems, MASS 2019, Monterey, CA, USA, 4–7 November 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019; pp. 10–18. [Google Scholar] [CrossRef]
- He, Z.; Cao, J.; Liu, X.; Tang, S. Who sits where? infrastructure-free in-vehicle cooperative positioning via smartphones. Sensors 2014, 14, 11605–11628. [Google Scholar] [CrossRef]
- Hong, J.H.; Margines, B.; Dey, A.K. A smartphone-based sensing platform to model aggressive driving behaviors. In Proceedings of the Conference on Human Factors in Computing Systems—Proceedings, Toronto, ON, Canada, 26 April–1 May 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 4047–4056. [Google Scholar] [CrossRef]
- Jiao, S.J.; Liu, L.Y.; Liu, Q. A hybrid deep learning model for recognizing actions of distracted drivers. Sensors 2021, 21, 7424. [Google Scholar] [CrossRef] [PubMed]
- Johnson, D.A.; Trivedi, M.M. Driving style recognition using a smartphone as a sensor platform. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC, Washington, DC, USA, 5–7 October 2011; pp. 1609–1615. [Google Scholar] [CrossRef]
- Khurana, R.; Goel, M. Eyes on the Road: Detecting Phone Usage by Drivers Using On-Device Cameras. In Proceedings of the Conference on Human Factors in Computing Systems—Proceedings, Honolulu, HI, USA, 25–30 April 2020; Association for Computing Machinery: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Koukoumidis, E.; Peh, L.S.; Martonosi, M.R. SignalGuru: Leveraging mobile phones for collaborative traffic signal schedule advisory. In Proceedings of the MobiSys’11—Compilation Proceedings of the 9th International Conference on Mobile Systems, Applications and Services and Co-located Workshops, Bethesda, MD, USA, 28 June–1 July 2011; pp. 127–140. [Google Scholar] [CrossRef]
- Li, Q.; Li, M.; Ke, X.; Kong, W.; Yang, L.; Tang, Z.; Chen, X.; Fang, D. WisDriver:A WiFi and Smartphone Sensing System for Safely Driving. In Proceedings of the 2019 IEEE Pacific Rim Conference on Communications, Computers and Signal Processing, PACRIM 2019—Proceedings, Victoria, BC, Canada, 21–23 August 2019; Institute of Electrical and Electronics Engineers Inc.: Manhattan, NY, USA, 2019. [Google Scholar] [CrossRef]
- Lindqvist, J.; Hong, J. Undistracted driving: A mobile phone that does not distract. In Proceedings of the HotMobile 2011: The 12th Workshop on Mobile Computing Systems and Applications, Phoenix, AZ, USA, 1–2 March 2011; pp. 70–75. [Google Scholar] [CrossRef]
- Liu, L.; Li, H.; Liu, J.; Karatas, C.; Wang, Y.; Gruteser, M.; Chen, Y.; Martin, R.P. BigRoad: Scaling road data acquisition for dependable self-driving. In Proceedings of the MobiSys 2017—Proceedings of the 15th Annual International Conference on Mobile Systems, Applications, and Services, Niagara Falls, NY, USA, 19–23 June 2017; Association for Computing Machinery, Inc.: New York, NY, USA, 2017; Volume 17, pp. 371–384. [Google Scholar] [CrossRef]
- Ma, C.; Dai, X.; Zhu, J.; Liu, N.; Sun, H.; Liu, M. DrivingSense: Dangerous Driving Behavior Identification Based on Smartphone Autocalibration. Mob. Inf. Syst. 2017, 2017. [Google Scholar] [CrossRef]
- Mantouka, E.G.; Barmpounakis, E.N.; Vlahogianni, E.I. Identifying driving safety profiles from smartphone data using unsupervised learning. Saf. Sci. 2019, 119, 84–90. [Google Scholar] [CrossRef]
- Mantouka, E.G.; Vlahogianni, E.I. Deep reinforcement learning for personalized driving recommendations to mitigate aggressiveness and riskiness: Modeling and impact assessment. Transp. Res. Part C Emerg. Technol. 2022, 142, 103770. [Google Scholar] [CrossRef]
- Meiring, G.A.M.; Myburgh, H.C. A review of intelligent driving style analysis systems and related artificial intelligence algorithms. Sensors 2015, 15, 30653–30682. [Google Scholar] [CrossRef] [PubMed]
- Meng, R.; Nelakuditi, S.; Wang, S.; Choudhury, R.R. OmniView: A mobile collaborative system for assisting drivers with a map of surrounding traffic. In Proceedings of the 2015 International Conference on Computing, Networking and Communications, ICNC 2015, Garden Grove, CA, USA, 16–19 February 2015; pp. 760–765. [Google Scholar] [CrossRef]
- Nambi, A.U.; Bannur, S.; Mehta, I.; Kalra, H.; Virmani, A.; Padmanabhan, V.N.; Bhandari, R.; Raman, B. Demo: HAMS: Driver and driving monitoring using a smartphone. In Proceedings of the Proceedings of the Annual International Conference on Mobile Computing and Networking, MOBICOM, New Delhi, India, 29 October–2 November 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 840–842. [Google Scholar] [CrossRef]
- Othman, W.; Kashevnik, A.; Hamoud, B.; Shilov, N. DriverSVT: Smartphone-measured vehicle telemetry data for driver state identification. Data 2022, 7, 181. [Google Scholar] [CrossRef]
- Pargal, S.; Chatterjee, S.; Sinha, U.; Mitra, B.; Chakraborty, S. My Mobile Knows That I am Driving! In-Vehicle (Relative) Blind Localization of a Smartphone. In Proceedings of the 2022 23rd IEEE International Conference on Mobile Data Management (MDM), Paphos, Cyprus, 6–9 June 2022; IEEE: Manhattan, NY, USA, 2022; pp. 494–499. [Google Scholar]
- Park, H.; Ahn, D.H.; Park, T.; Shin, K.G. Automatic Identification of Driver’s Smartphone Exploiting Common Vehicle-Riding Actions. IEEE Trans. Mob. Comput. 2018, 17, 265–278. [Google Scholar] [CrossRef]
- Punay, V.E.C.; Briones, H.S.; De Leon, J.C.L.; Petralba, J.E. UnDivided: An android application for anti-distracted driving. In Proceedings of the 2017 International Conference on Orange Technologies, ICOT 2017, Singapore, 8–10 December 2017; Institute of Electrical and Electronics Engineers Inc.: Manhattan, NY, USA, 2018; Volume 2018, pp. 111–114. [Google Scholar] [CrossRef]
- Qi, B.; Zhao, W.; Wang, X.; Li, S.; Runge, T. A low-cost driver and passenger activity detection system based on deep learning and multiple sensor fusion. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; IEEE: Manhattan, NY, USA, 2019; pp. 170–176. [Google Scholar]
- Qi, B.; Liu, P.; Ji, T.; Zhao, W.; Banerjee, S. DrivAid: Augmenting Driving Analytics with Multi-Modal Information. In Proceedings of the IEEE Vehicular Networking Conference, VNC, Los Angeles, CA, USA, 4–6 December 2019; Volume 2018. [Google Scholar] [CrossRef]
- Rachmadi, R.R.; Sudarsono, A.; Santoso, T.B. Performance Analysis of Driver Abnormal Behavior Classification System Using Enhanced Multi-Layer Perceptron. In Proceedings of the 2021 International Electronics Symposium (IES), Virtually, 9–13 August 2021; IEEE: Manhattan, NY, USA, 2021; pp. 81–86. [Google Scholar]
- Singh, S.; Meng, R.; Nelakuditi, S.; Tong, Y.; Wang, S. SideEye: Mobile assistant for blind spot monitoring. In Proceedings of the 2014 International Conference on Computing, Networking and Communications, ICNC 2014, Honolulu, HI, USA, 3–6 February 2014; IEEE Computer Society: Washington, DC, USA, 2014; pp. 408–412. [Google Scholar] [CrossRef]
- Torres, R.; Ohashi, O.; Pessin, G. A machine-learning approach to distinguish passengers and drivers reading while driving. Sensors 2019, 19, 3174. [Google Scholar] [CrossRef]
- Cancello Tortora, G.; Casini, M.; Lagna, A.; Marino, M.; Vecchio, A. Detection of Distracted Driving: A Smartphone-Based Approach. In Proceedings of the Intelligent Transport Systems: 6th EAI International Conference, INTSYS 2022, Lisbon, Portugal, 15–16 December 2022; Springer: Berlin/Heidelberg, Germany, 2023; pp. 157–165. [Google Scholar]
- Tselentis, D.I.; Vlahogianni, E.I.; Yannis, G. Temporal analysis of driving efficiency using smartphone data. Accid. Anal. Prev. 2021, 154, 106081. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Y.J.; Yang, J.; Gruteser, M.; Martin, R.P.; Liu, H.; Liu, L.; Karatas, C. Determining Driver Phone Use by Exploiting Smartphone Integrated Sensors. IEEE Trans. Mob. Comput. 2016, 15, 1965–1981. [Google Scholar] [CrossRef]
- Vasey, E.; Ko, S.; Jeon, M. In-vehicle affect detection system: Identification of emotional arousal by monitoring the driver and driving style. In Proceedings of the Adjunct Proceedings - 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications, AutomotiveUI 2018, Toronto, ON, Canada, 23–25 September 2018; Association for Computing Machinery, Inc.: New York, NY, USA, 2018; pp. 243–247. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Barmpounakis, E.N. Driving analytics using smartphones: Algorithms, comparisons and challenges. Transp. Res. Part C Emerg. Technol. 2017, 79, 196–206. [Google Scholar] [CrossRef]
- Woo, C.; Kulic, D. Manoeuvre segmentation using smartphone sensors. In Proceedings of the IEEE Intelligent Vehicles Symposium, Proceedings, Las Vegas, NV, USA, 19 October–13 November 2020; Institute of Electrical and Electronics Engineers Inc.: Manhattan, NY, USA, 2016; Volume 2016, pp. 572–577. [Google Scholar] [CrossRef]
- Xie, J.; Zhu, M. Maneuver-based driving behavior classification based on random forest. IEEE Sens. Lett. 2019, 3, 1–4. [Google Scholar] [CrossRef]
- Xiao, D.; Feng, C. Detection of drivers visual attention using smartphone. In Proceedings of the 2016 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery, ICNC-FSKD 2016, Changsha, China, 13–15 August 2016; Institute of Electrical and Electronics Engineers Inc.: Manhattan, NY, USA, 2016; pp. 630–635. [Google Scholar] [CrossRef]
- Xie, J.; Hilal, A.R.; Kulic, D. Driving Maneuver Classification: A Comparison of Feature Extraction Methods. IEEE Sens. J. 2018, 18, 4777–4784. [Google Scholar] [CrossRef]
- Xie, J.; Hilal, A.R.; Kulic, D. Driver Distraction Recognition Based on Smartphone Sensor Data. In Proceedings of the Proceedings—2018 IEEE International Conference on Systems, Man, and Cybernetics, SMC 2018, Miyazaki, Japan, 7–10 October 2018; Institute of Electrical and Electronics Engineers Inc.: Manhattan, NY, USA, 2019; pp. 801–806. [Google Scholar] [CrossRef]
- Yang, J.; Liu, H.; Chen, Y.; Sidhom, S.; Chandrasekaran, G.; Cecan, N.; Gruteser, M.; Vu, T.; Martin, R.P. Sensing Driver Phone Use with Acoustic Ranging through Car Speakers. IEEE Trans. Mob. Comput. 2012, 11, 1426–1440. [Google Scholar] [CrossRef]
- Yaswanth, K.; Manda, R.; Nandan, D. Study of mechanized recognition of driver’s smartphone exploiting common vehicle-riding actions. In Proceedings of the Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2021; Volume 1162, pp. 100–108. [Google Scholar] [CrossRef]
- You, C.W.; Lane, N.D.; Chen, F.; Wang, R.; Chen, Z.; Bao, T.J.; Montes-de Oca, M.; Cheng, Y.; Lint, M.; Torresani, L.; et al. CarSafe App: Alerting drowsy and distracted drivers using dual cameras on smartphones. In Proceedings of the MobiSys 2013—Proceedings of the 11th Annual International Conference on Mobile Systems, Applications, and Services, Taipei, Taiwan, 25–28 June 2013; pp. 13–26. [Google Scholar] [CrossRef]
- Ziakopoulos, A.; Kontaxi, A.; Yannis, G. Analysis of mobile phone use engagement during naturalistic driving through explainable imbalanced machine learning. Accid. Anal. Prev. 2023, 181, 106936. [Google Scholar] [CrossRef] [PubMed]
- Krajewski, J.; Sommer, D.; Trutschel, U.; Edwards, D.; Golz, M. Steering wheel behavior based estimation of fatigue. In Proceedings of the Driving Assesment Conference; University of Iowa: Iowa City, IA, USA, 2009; Volume 5. [Google Scholar]
- Kaiser, C.; Stocker, A.; Festl, A.; Djokic-Petrovic, M.; Papatheocharous, E.; Wallberg, A.; Ezquerro, G.; Orbe, J.O.; Szilagyi, T.; Fellmann, M. A Vehicle Telematics Service for Driving Style Detection: Implementation and Privacy Challenges. In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems, Prague, Czech Republic, 2–4 May 2020; pp. 29–36. [Google Scholar]

| Author(s) | Scope | Limitations |
|---|---|---|
| Dong et al., 2010 [3] | Focus on driver inattention monitoring | No in-depth review on smartphone-based systems |
| Kashevnik et al., 2021 [32] | Present holistic framework for detecting driver distraction | No detailed review on smartphone aspects |
| Lee et al., 2008 [6] | Define driver distraction | No focus on smartphone aspects |
| Oviedo-Trespalacios, O., 2016 [24] | Focus on aspects of distraction coming from the use of mobile phones inside a car | Does not consider smartphone as a tool or data source for approaches to prevent driver distraction |
| Young et al., 2007 [2] | Concentrate on distractions coming from inside a vehicle | No consideration of smartphones as tools or data source for approaches to prevent driver distraction |
| Database | Scoping Step | Selecting Step |
|---|---|---|
| IEEE | 14 | 3 |
| Scopus | 16 | 7 |
| Web of Science | 48 | 10 |
| In total | 78 (60 unique) | 20 (16 unique) |
| Researcher | Initial Analysis | Iteration 1 | Iteration 2 | Iteration 3 |
|---|---|---|---|---|
| 1 | Incl.: 17 Excl.: 52 Maybe: 9 | Incl.: 20 Excl.: 58 | Incl.: 18 Excl.: 60 | Incl.: 16 Excl.: 62 |
| 2 | Incl.: 11 Excl.: 65 Maybe: 2 | Incl.: 11 Excl.: 67 | Incl.: 18 Excl.: 60 | Incl.: 16 Excl.: 62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papatheocharous, E.; Kaiser, C.; Moser, J.; Stocker, A. Monitoring Distracted Driving Behaviours with Smartphones: An Extended Systematic Literature Review. Sensors 2023, 23, 7505. https://doi.org/10.3390/s23177505
Papatheocharous E, Kaiser C, Moser J, Stocker A. Monitoring Distracted Driving Behaviours with Smartphones: An Extended Systematic Literature Review. Sensors. 2023; 23(17):7505. https://doi.org/10.3390/s23177505
Chicago/Turabian StylePapatheocharous, Efi, Christian Kaiser, Johanna Moser, and Alexander Stocker. 2023. "Monitoring Distracted Driving Behaviours with Smartphones: An Extended Systematic Literature Review" Sensors 23, no. 17: 7505. https://doi.org/10.3390/s23177505
APA StylePapatheocharous, E., Kaiser, C., Moser, J., & Stocker, A. (2023). Monitoring Distracted Driving Behaviours with Smartphones: An Extended Systematic Literature Review. Sensors, 23(17), 7505. https://doi.org/10.3390/s23177505