
Simulation and Experimentation of a Grounding Network Detection Scheme Based on a Low-Frequency Electromagnetic Method
Abstract
:1. Introduction
2. Materials and Methods
2.1. Basic Principles of Detection
2.2. Simulation Model Design and Parameter Design
2.3. Coil Detection Model
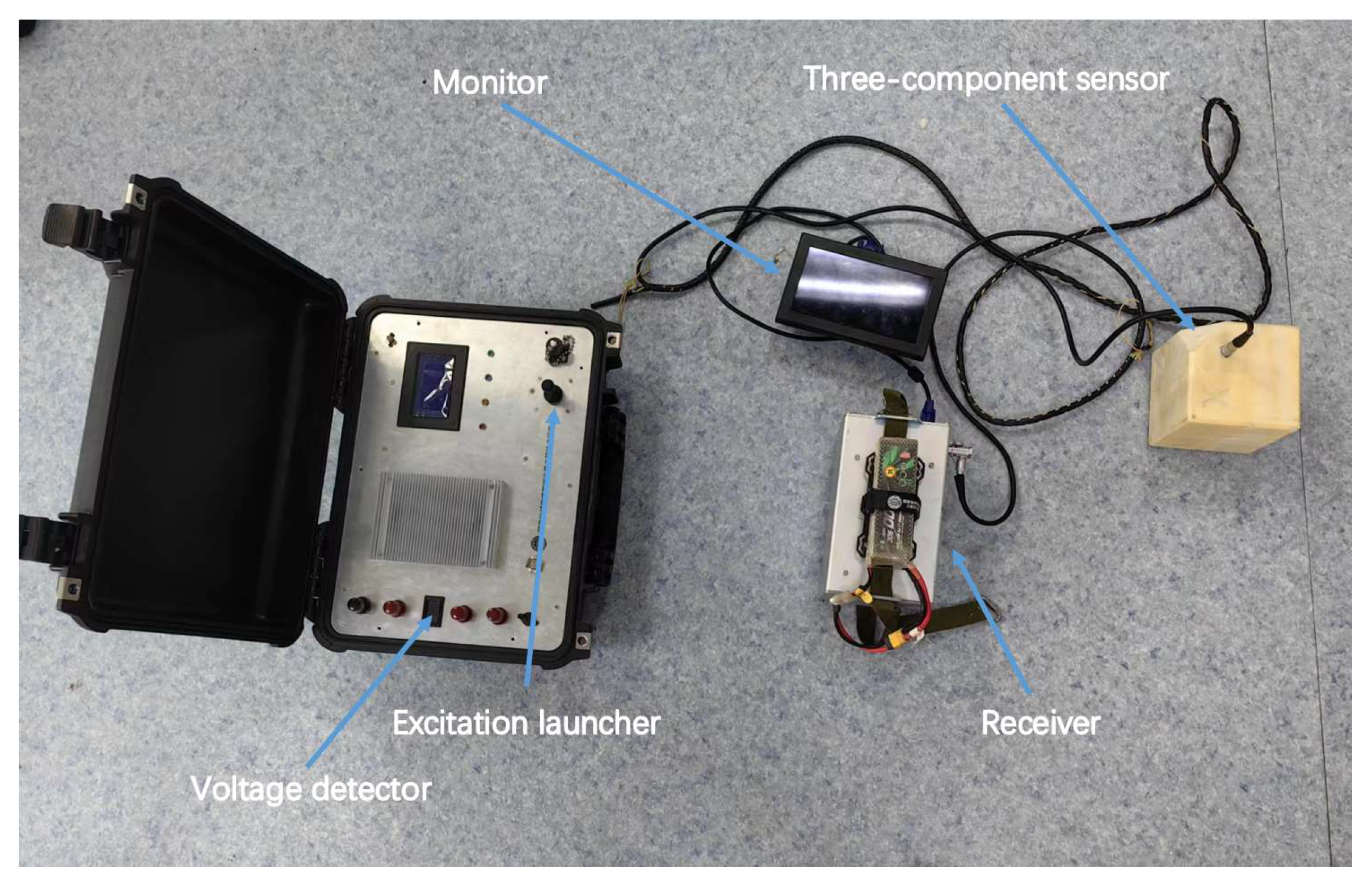
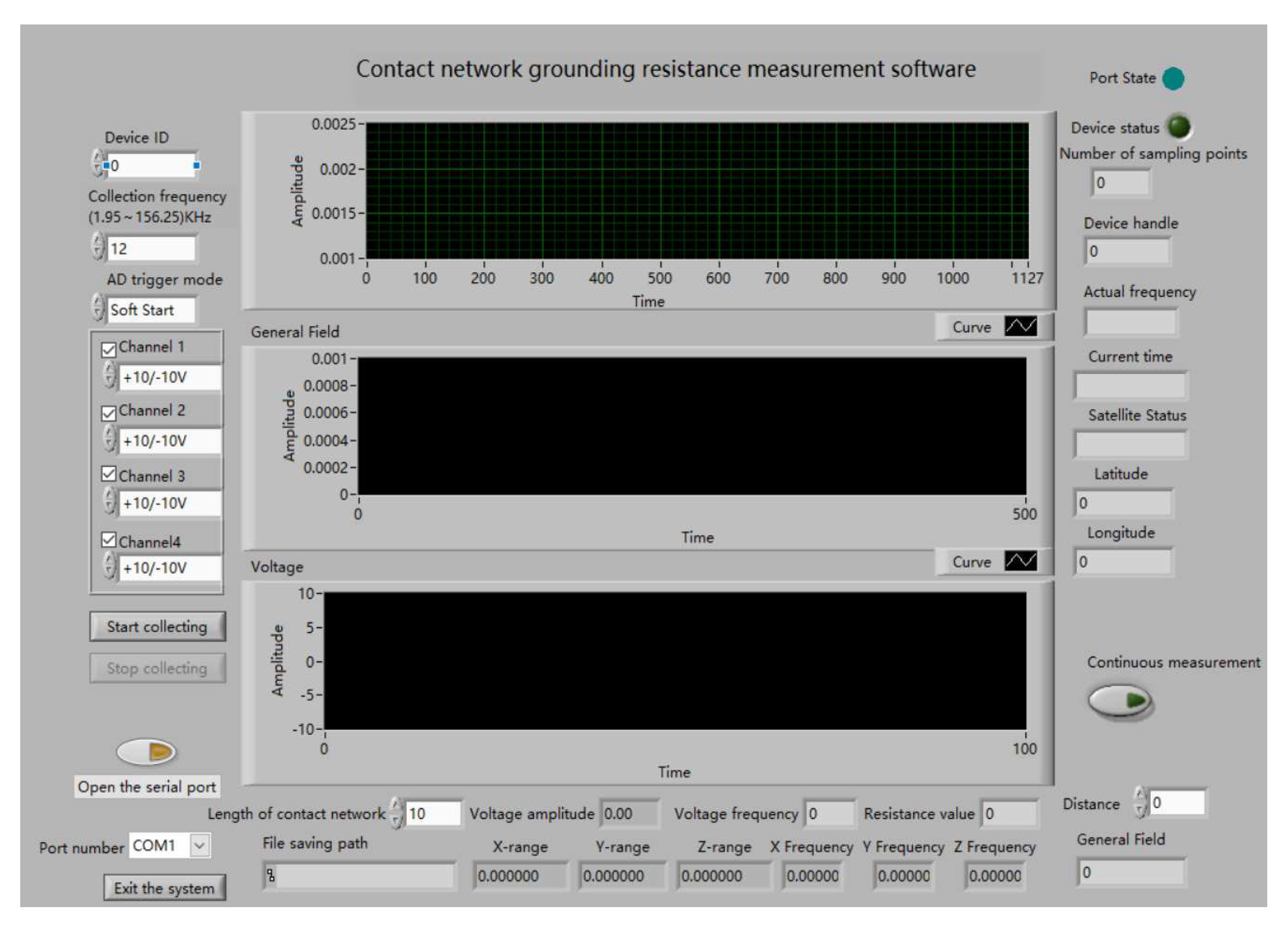
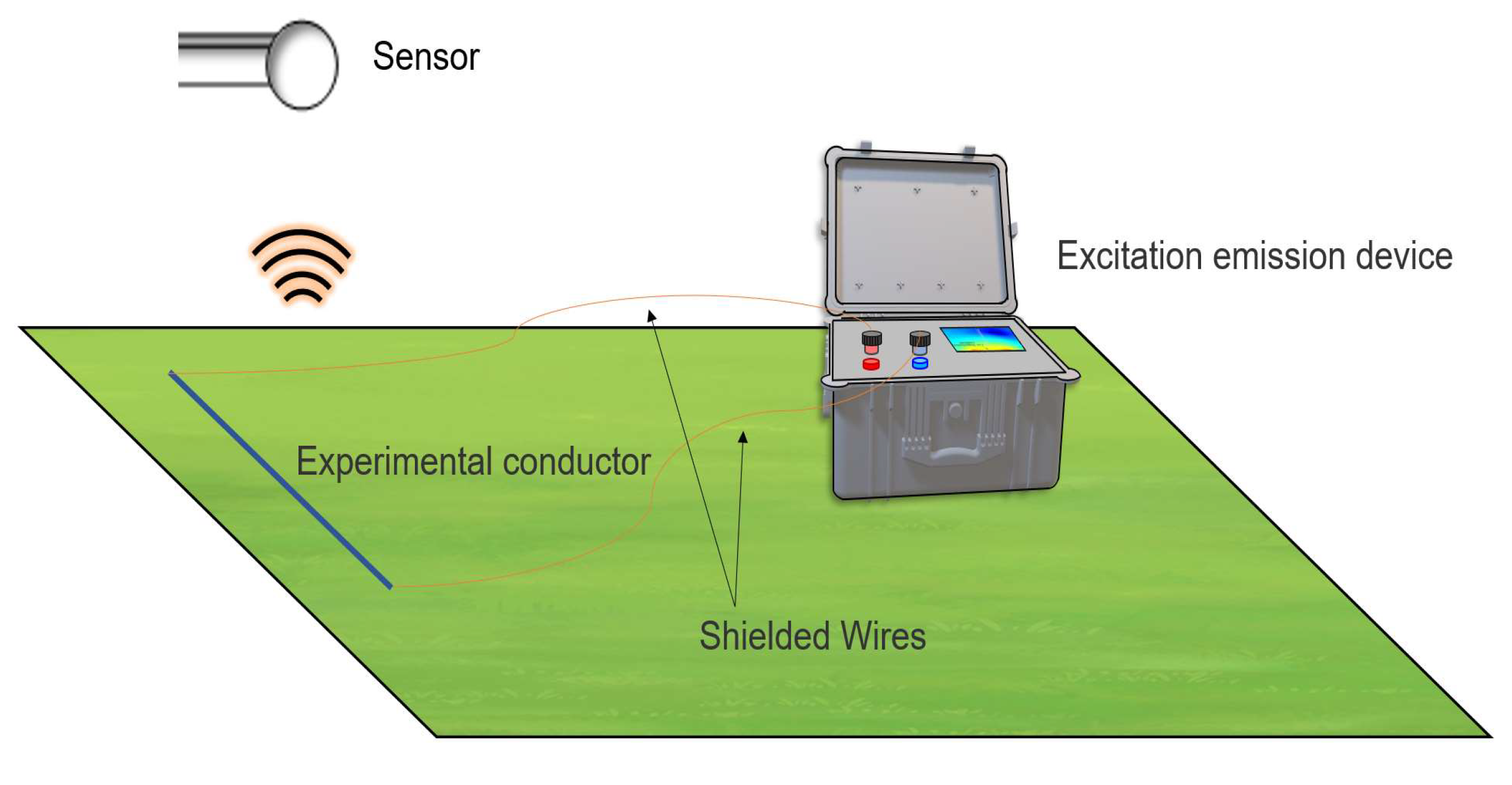
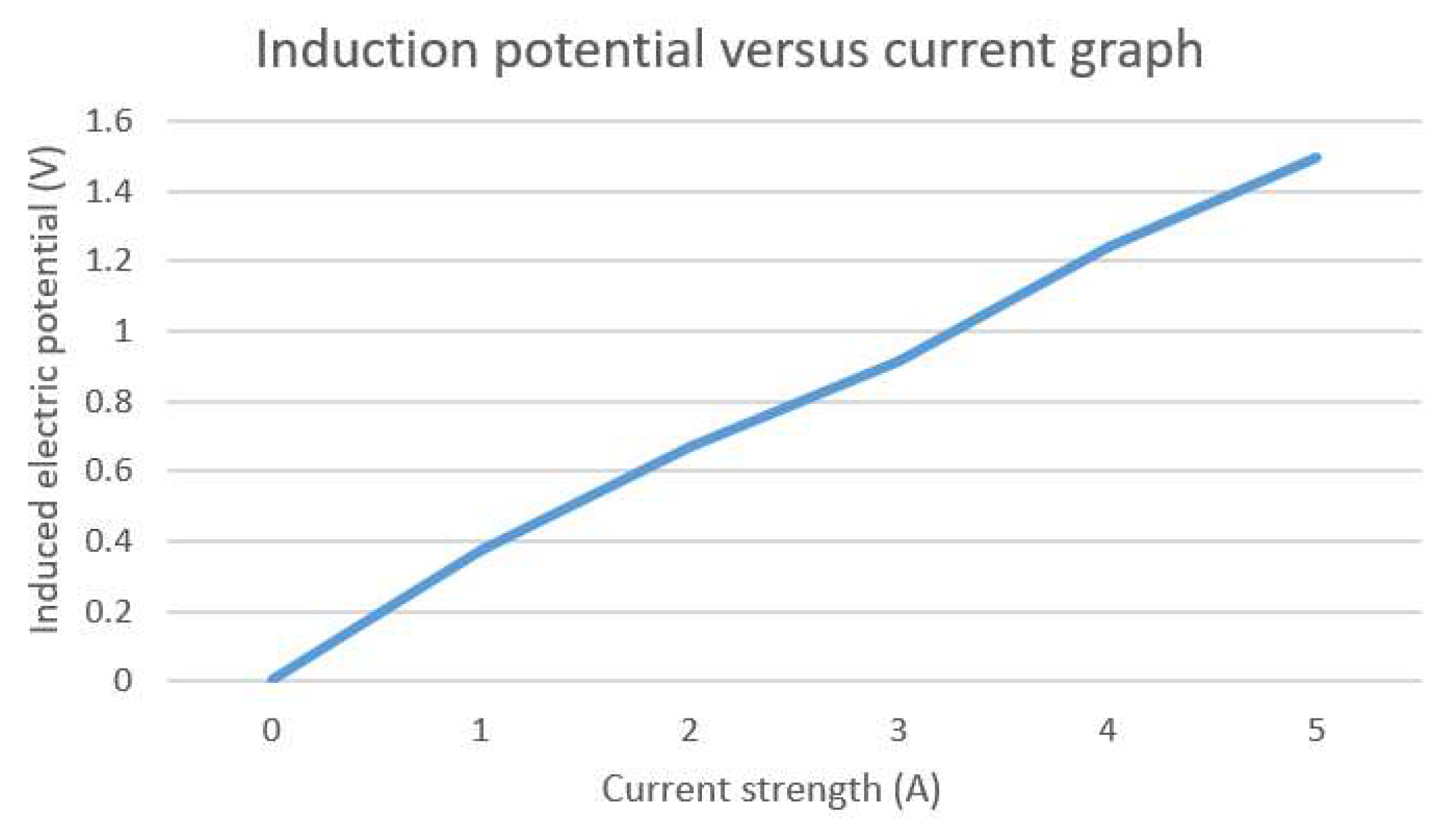
2.4. Field Experiment
3. Conclusions and Discussion
3.1. Discussion
3.2. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- He, J.; Zeng, R. Grounding Technology for Power Systems; Science Press: Beijing, China, 2007. [Google Scholar]
- Dong, J. Power system grounding network defect diagnosis and development trend discussion. Sci. Inf. Technol. 2020, 8, 121–124. [Google Scholar]
- Zhu, Q.; Hu, S.; Chen, Y.; Li, X.; Zhao, X.; Wan, Y. Risk analysis of soil corrosion in buried natural gas pipeline networks. Oil Gas Field Surf. Eng. 2019, 38, 104–108. [Google Scholar]
- Sarajcev, P.; Vujevic, S. A review of methods for grounding grid analysis. In Proceedings of the SoftCOM 2009-17th International Conference on Software, Telecommunications & Computer Networks, Hvar, Croatia, 24–26 September 2009; pp. 42–49. [Google Scholar]
- Wu, D.; Lin, Y.; Qiu, Y. Summary of diagnosis methods for the integrity of grounding grid. In Proceedings of the 2012 China International Conference on Electricity Distribution (CICED), Shanghai, China, 10–14 September 2012. [Google Scholar]
- Fu, Z.; Wang, X.; Wang, Q.; Xu, X.; Fu, N.; Qin, S. Advances and challenges of corrosion and topology detection of grounding grid. Appl. Sci. 2019, 9, 2290. [Google Scholar] [CrossRef]
- Yang, H.; Liu, G.; Zhang, L.; Li, Y. Diagnosis methods and development trend of grounding network defects in power systems. New Technol. Electr. Power 2016, 35, 35–42. [Google Scholar]
- Zhang, X.; Mo, N.; Li, Y.; Wang, Y.; Wang, T.; Luo, Y. Prospects for the application of corrosion electrochemical detection technology on grounding networks. North China Power Technol. 2007, 140–143. [Google Scholar]
- Schaefer, L.P. Electrical grounding systems and corrosion. Trans. Am. Inst. Electr. Eng. Part II 1955, 74, 75–83. [Google Scholar] [CrossRef]
- Lawson, V.R. Problems and detection of line anchor and substation ground grid corrosion. IEEE Trans. Ind. Appl. 1988, 24, 25–32. [Google Scholar] [CrossRef]
- Giao, T.N.; Sarma, M.P. Effect of two-layer earth on the electric field near HVDC ground electrodes. IEEE Trans. Power Appar. Syst. 1972, 91, 2356–2365. [Google Scholar] [CrossRef]
- Zixuan, L. Development of a Grounding Network Positioning and Corrosion Detection Device for Power Transmission Towers Based on Electromagnetic Method. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2021. (In Chinese). [Google Scholar]
- Penghe, Z. Research on the Diagnosis of Grounding Network Defects Based on the Frequency Domain Characteristics of Grounding System. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2011. (In Chinese). [Google Scholar]
- Edward, R.N.; Lee, H.; Nabighian, M.N.; Li, J. Theory of magnetoresistivity (MMR) method. J. Chang. Univ. (Earth Sci. Ed.) 1980, 70–77. [Google Scholar]
- Shi, R.-B.; Chen, X.-C. An analysis of the application of Biot-Savard’s law. Electron. Compon. Inf. Technol. 2020, 4, 151–152; 155. [Google Scholar]
- Hu, J.; Zeng, R.; He, J.; Sun, W.; Yao, J.; Su, Q. Novel method of corrosion diagnosis for grounding grid. In Proceedings of the 2000 International Conference on Power System Technology. Proceedings (Cat. No. 00EX409), Perth, WA, Australia, 4–7 December 2000; Volume 3, pp. 1365–1370. [Google Scholar]
- Dawalibi, F. Electromagnetic Fields Generated by Overhead and Buried Short Conductors Part 1-Ground Networks. IEEE Trans. Power Deliv. 1986, 1, 112–119. [Google Scholar] [CrossRef]
- Pi, S.; Lin, J. Accurate Modeling Approach and Uncertainty Quantification for TEM Weak-Coupling Coil: A Case Study on Bucking Coil. IEEE Sens. J. 2023, 16, 18108–18117. [Google Scholar]
- USB. 2404 Synchronous Capture Card. Available online: http://a.gongkong.com/Survey/xinchao09/USB2404.pdf (accessed on 13 March 2023). (In Chinese).
- Shrenika, R.M.; Chikmath, S.S.; Kumar, A.V.R.; Divyashree, Y.V.; Swamy, R.K. Non-contact water level monitoring system implemented using LabVIEW and Arduino. In Proceedings of the International Conference on Recent Advances in Electronics and Communication Technology (ICRAECT), Bangalore, India, 16–17 March 2017; pp. 306–309. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Corrosion Level/Times | Multisim (mA) | Comsol (mA) | Difference Value (mA) |
|---|---|---|---|
| 0 | 600.0 | 603.4 | 3.4 |
| 5 | 200.7 | 212.5 | 11.8 |
| 10 | 120.1 | 135.2 | 15.2 |
| Port Number/m | Actual Resistance/Ω | Actual Test 1/Ω | Actual Test 2/Ω | Actual Test 3/Ω | Average/Ω | Error Value/Ω |
|---|---|---|---|---|---|---|
| GH/10 m | 1.142 | 1.047 | 1.057 | 1.049 | 1.051 | 0.091 |
| GH/10 m | 6.139 | 5.217 | 5.214 | 5.223 | 5.218 | 0.921 |
| GH/10 m | 12.119 | 9.802 | 9.789 | 9.794 | 9.795 | 2.324 |
| GH/15 m | 1.168 | 1.077 | 1.092 | 1.089 | 1.086 | 0.082 |
| GH/15 m | 6.163 | 5.633 | 5.627 | 5.636 | 5.632 | 0.801 |
| GH/15 m | 12.141 | 10.069 | 10.079 | 10.083 | 10.077 | 2.064 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, Q.; Zou, B.; Song, Y.; Liu, Y.; Zhang, R. Simulation and Experimentation of a Grounding Network Detection Scheme Based on a Low-Frequency Electromagnetic Method. Sensors 2023, 23, 7254. https://doi.org/10.3390/s23167254
Duan Q, Zou B, Song Y, Liu Y, Zhang R. Simulation and Experimentation of a Grounding Network Detection Scheme Based on a Low-Frequency Electromagnetic Method. Sensors. 2023; 23(16):7254. https://doi.org/10.3390/s23167254
Chicago/Turabian StyleDuan, Qingming, Bofeng Zou, Yuxin Song, Yuxiang Liu, and Ruipeng Zhang. 2023. "Simulation and Experimentation of a Grounding Network Detection Scheme Based on a Low-Frequency Electromagnetic Method" Sensors 23, no. 16: 7254. https://doi.org/10.3390/s23167254
APA StyleDuan, Q., Zou, B., Song, Y., Liu, Y., & Zhang, R. (2023). Simulation and Experimentation of a Grounding Network Detection Scheme Based on a Low-Frequency Electromagnetic Method. Sensors, 23(16), 7254. https://doi.org/10.3390/s23167254