
Extended Higher-Order Elements with Frequency-Doubled Parameters: The Hysteresis Loops Are Always of Type II



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
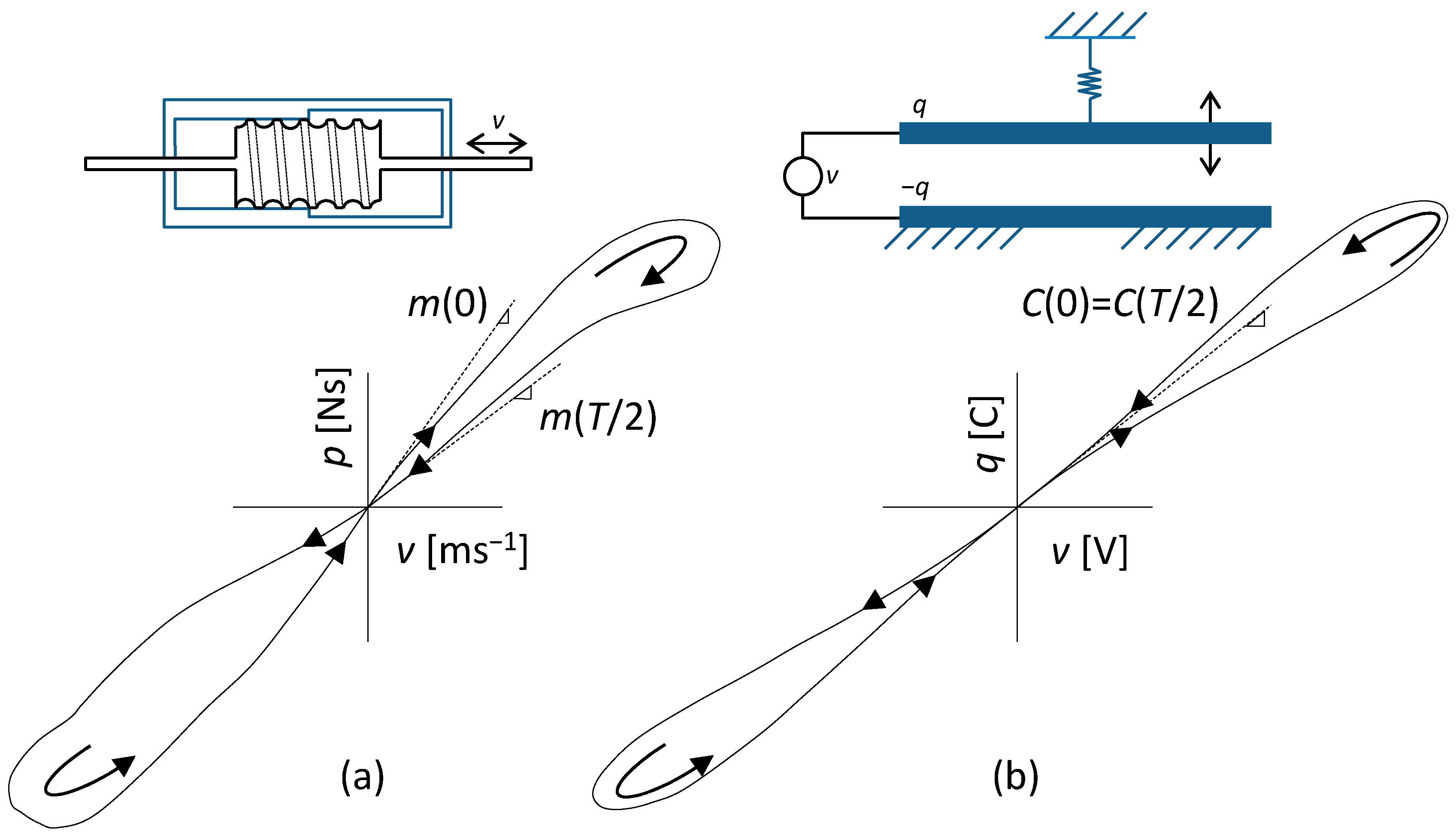
2. MEMS Modeling via Extended HOEs: Type I and Type II Pinched Hysteresis Loops
3. Extended HOE: PHL Type Evaluation
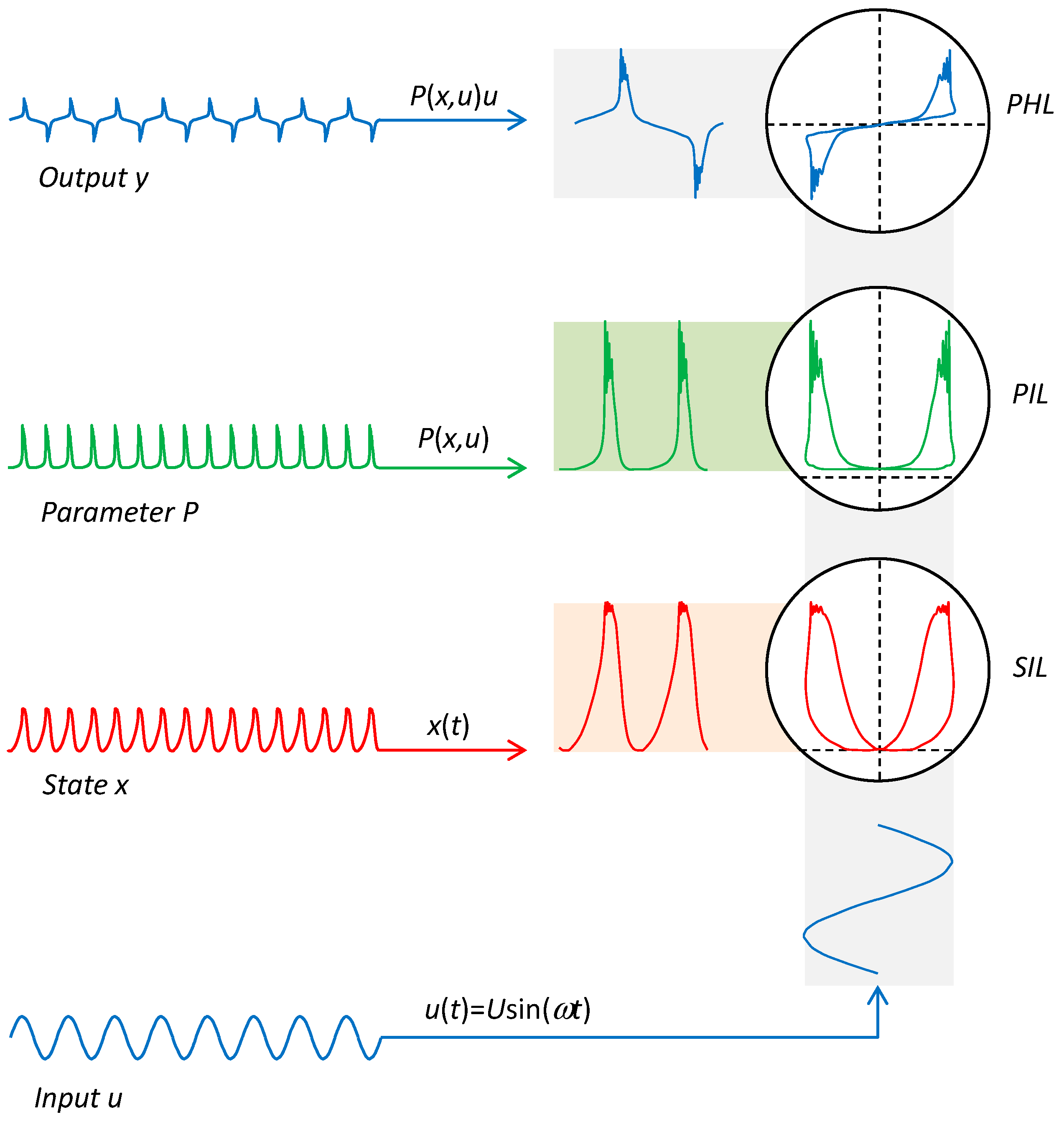
4. Characteristics of Extended HOE: PHL, PIL, and SIL
5. Extended Higher-Order Element with Frequency-Doubled Parameter
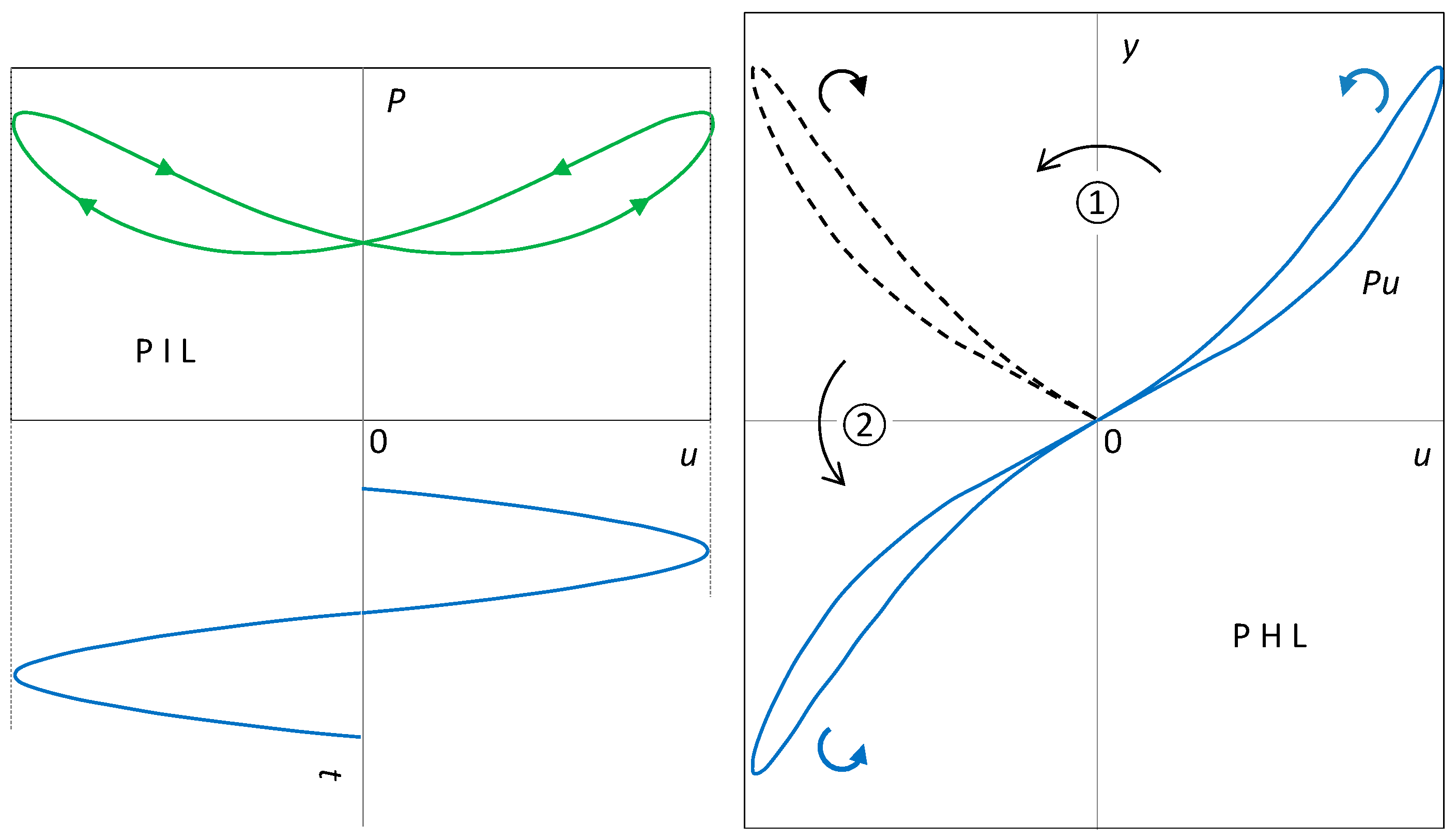
5.1. PIL Features
5.2. PHL Features
- Axial symmetry changes the orientation of the curve. A composition of two axial symmetries leading from one lobe of the PHL to the other will preserve the orientation of the original lobe. The PHL will be of type II. □
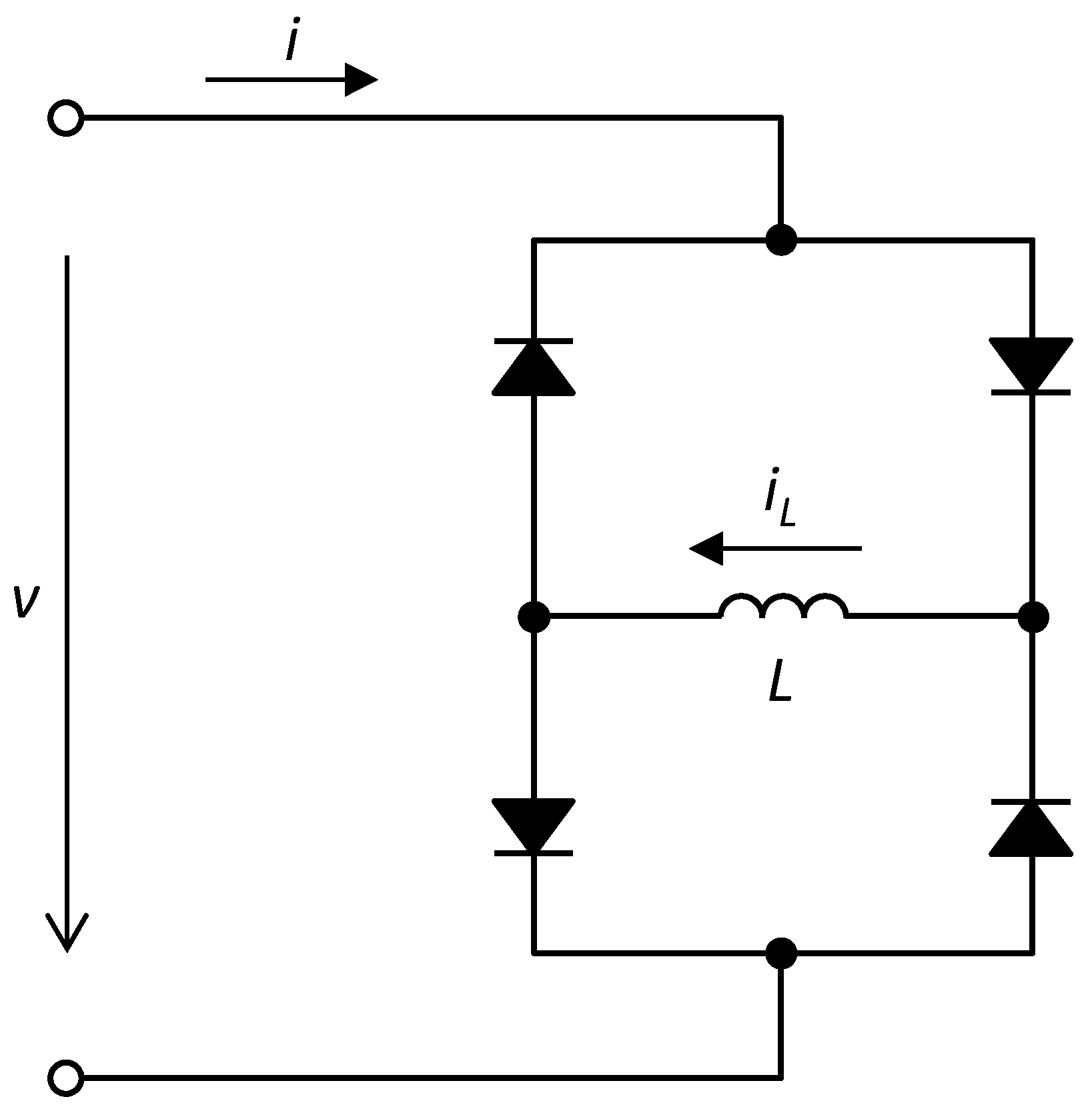
5.3. Illustrative Example: The Graetz Bridge with Inductive Load
6. Extended Higher-Order Element with Frequency-Doubled State
6.1. PHL and PIL Features in the Case of a Generic Element
6.2. PHL Type in the Case of an Extended Element
- The native PHL of the extended element with frequency-doubled state is therefore of the NCT(1) type, but what the actual type is depends on the specific form of the function P(x,u). □
6.3. Illustrative Example: Extended Memristor
7. Implications of New Theorems
- If the steady PHL is of type I or is centrally asymmetric regardless of the loop type, then it is not an element with a frequency-doubled parameter (implied by Theorem 2).
- If the generic element produces a steady PHL of type I or the PHL is centrally asymmetric regardless of the loop type, then it is not an element with a frequency-doubled state (implied by Theorem 3).
- If an element generates a PHL of the classical CT(0) type, it means that at least one of its state variables does not oscillate at twice the frequency of the excitation signal (following from Theorem 4).
- If the Parameter vs. Input Loop (PIL) consists of two lobes, this does not mean that a type II PHL will be generated (see the illustrative example in Section 6.3). Thus, the current classification of loops into types I and II based on the number of PIL loops [5] does not always correspond to reality.
- If the state variable oscillates at twice the frequency of the excitation variable, it does not follow that the PHL must be of type II. However, this always follows for generic elements.
- If the state variable oscillates at the same frequency as the excitation variable, it does not mean that the PHL must be of type I.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Korvink, J.G.; Paul, O. MEMS: A Practical Guide of Design, Analysis, and Applications, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1–965. [Google Scholar]
- Di Barba, P.; Wiak, S. MEMS: Field Models and Optimal Design, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2019; pp. 1–202. [Google Scholar]
- Chua, L. Memristor—The missing circuit element. IEEE Trans. Circuits Theory 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.Q.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-Order Systems and Controls. Fundamentals and Applications; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1–414. [Google Scholar]
- Pershin, Y.V.; Di Ventra, M. Memory effects in complex materials and nanoscale systems. Adv. Phys. 2011, 60, 145–227. [Google Scholar] [CrossRef]
- Chua, L.O.; Kang, S.M. Memristive Devices and Systems. Proc. IEEE 1976, 64, 209–223. [Google Scholar] [CrossRef]
- Di Ventra, M.; Pershin, V.; Chua, L.O. Circuit Elements with Memory: Memristors, Memcapacitors, and Meminductors. Proc. IEEE 2009, 97, 1717–1724. [Google Scholar] [CrossRef]
- Chua, L.O. Device modeling via nonlinear circuit elements. IEEE T Circuits Syst. 1980, 27, 1014–1044. [Google Scholar] [CrossRef]
- Biolek, D.; Biolek, Z. Predictive Models of Nanodevices. IEEE T Nanotechnol. 2018, 17, 906–913. [Google Scholar] [CrossRef]
- Biolek, Z.; Biolkova, V.; Biolek, D.; Kolka, Z. Extended and Generic Higher-Order Elements for MEMS Modeling. Sensors 2022, 22, 8007. [Google Scholar] [CrossRef] [PubMed]
- An, D.; Li, H.; Xu, Y.; Zhang, L. Compensation of Hysteresis on Piezoelectric Actuators Based on Tripartite PI Model. Micromachines 2018, 9, 44. [Google Scholar] [CrossRef]
- Najem, J.S.; Taylor, G.J.; Weiss, R.J.; Hasan, M.S.; Rose, G.; Schuman, C.D.; Belianinov, A.; Collier, C.P.; Sarles, S.A. Memristive Ion Channel-Doped Biomembranes as Synaptic Mimics. ACS Nano 2018, 12, 4702–4711. [Google Scholar] [CrossRef]
- Chiolerio, A.; Roppolo, I.; Cauda, V.; Crepaldi, M.; Bocchini, S.; Bejtka, K.; Verna, A.; Pirri, C.F. Ultraviolet mem-sensors: Flexible anisotropic composites featuring giant photocurrent enhancement. Nano Res. 2015, 8, 1956–1963. [Google Scholar] [CrossRef]
- Tuszynski, J.A.; Friesen, D.; Freedman, H.; Sbitnev, V.I.; Kim, H.; Santelices, I.; Kalra, A.P.; Patel, S.D.; Shankar, K.; Chua, L.O. Microtubules as Sub-Cellular Memristors. Sci. Rep. 2020, 10, 2108. [Google Scholar] [CrossRef]
- Le, H.T.; Haque, R.I.; Ouyang, Z.; Lee, S.W.; Fried, S.I.; Zhao, D.; Qiu, M.; Han, A. MEMS inductor fabrication and emerging applications in power electronics and neurotechnologies. Microsyst. Nanoeng. 2011, 7, 59. [Google Scholar] [CrossRef] [PubMed]
- Tavakkoli, H.; Momen, H.G.; Sani, E.A.; Yazgi, M. An Inductive MEMS Accelerometer. In Proceedings of the 2017 10th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 30 November–2 December 2017; IEEE: Toulouse, France, 2017; pp. 459–463. [Google Scholar]
- Chu, W.-H.; Mehregany, M.; Mullen, R.L. Analysis of tip deflection and force of a bimetallic cantilever microactuator. J. Micromech. Microeng. 1993, 3, 4–7. [Google Scholar] [CrossRef]
- Yeh, S.-K.; Chang, H.-C.; Fang, W. Development of CMOS MEMES inductive type tactile sensor with the integration of chrome steel ball force interface. J. Micromech. Microeng. 2018, 28, 044005. [Google Scholar] [CrossRef]
- Zine-El-Abidine, I.; Okoniewski, M.; McRory, J.G. A tunable RF MEMS inductor. In Proceedings of the 2004 International Conference on MEMS, NANO and Smart Systems, Banff, AB, Canada, 25–27 August 2004; IEEE: Toulouse, France, 2004; pp. 636–638. [Google Scholar]
- Najem, J.S.; Hasan, M.S.; Williams, R.S.; Weiss, R.J.; Rose, G.S.; Taylor, G.J.; Sarles, S.A.; Collier, C.P. Dynamic nonlinear memory capacitance in biomimetic membranes. Nat. Commun. 2019, 10, 3239. [Google Scholar] [CrossRef] [PubMed]
- Biolek, Z.; Biolková, V.; Biolek, D.; Kolka, Z. Modeling of the generic memcapacitors using higher-order multi-ports. Commun. Nonlinear Sci. Numer. Simul. 2022, 113, 106497. [Google Scholar] [CrossRef]
- Kolka, Z.; Biolková, V.; Biolek, D.; Biolek, Z. Modeling Electrostatic MEMS Actuator. In Proceedings of the 2021 28th IEEE International Conference on Electronics, Circuits, and Systems (ICECS), Dubai, United Arab Emirates, 28 November–1 December 2021; IEEE: Toulouse, France, 2021; pp. 1–5. [Google Scholar]
- Qin, Y.; Zhao, X.; Zhou, L. Modeling and Identification of the Rate-Dependent Hysteresis of Piezoelectric Actuator Using a Modified Prandtl-Ishlinskii Model. Micromachines 2017, 8, 114. [Google Scholar] [CrossRef]
- Rakotondrabe, M. Bouc-Wen modeling and inverse multiplicative structure to compensate hysteresis nonlinearity in piezoelectric actuators. IEEE Trans. Autom. Sci. Eng. 2011, 8, 428–431. [Google Scholar] [CrossRef]
- Carrara, S. The Birth of a New Field: Memristive Sensors. A Review. IEEE Sens. J. 2021, 21, 12370–12378. [Google Scholar] [CrossRef]
- Almeida, S.F.; Mireles, J.; Garcia, E.J.; Zubia, D. MEMS closed-loop control incorporating a memristor as feedback sensing element. IEEE Trans. Circuits Syst. II Express Br. 2016, 3, 294–298. [Google Scholar] [CrossRef]
- Almeida, S.F.; Kachmar, G.K.; Mireles, J.; Pierluissi, J.; MacDonald, E.; Garcia, E.J.; Zubia, D. Integration of memristors with MEMS in different circuit configurations. NSTI-Nanotech. 2013, 2, 532–535. [Google Scholar]
- Wang, R.; Zhang, W.; Wang, S.; Zeng, T.; Ma, X.; Wang, H.; Hao, Y. Memristor-based Signal Processing for Compressed Sensing. Nanomaterials 2023, 13, 1354. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Chen, Y.; Gu, Y.; Li, H. Spintronic Memristor Temperature Sensor. IEEE Electron. Device Lett. 2010, 31, 20–22. [Google Scholar] [CrossRef]
- Dmitriev, S.; Lilach, Y.; Button, B.; Moskovits, M.; Kolmakov, A. Nanoengineered chemiresistors: The interplay between electron transport and chemisorption properties of morphologically encoded SnO2 nanowires. Nanotechnology 2007, 18, 055707. [Google Scholar] [CrossRef]
- Puppo, F.; Di Ventra, M.; De Micheli, G.; Carrara, S. Memristive sensors for pH measure in dry conditions. Surf. Sci. 2014, 624, 76–79. [Google Scholar] [CrossRef][Green Version]
- Homsi, R.; Al-Azzam, N.; Mohammad, B.; Alazam, A. Memristive Biosensors for Cancer Biomarkers Detection: A Review. IEEE Access 2003, 11, 19347–19361. [Google Scholar] [CrossRef]
- Hahm, J.-I.; Lieber, C.M. Direct ultrasensitive electrical detection of DNA and DNA sequence variations using nanowire nanosensors. Nano Lett. 2004, 4, 51–54. [Google Scholar] [CrossRef]
- Yang, J.; Sun, Z.; Wang, X.; Chen, Y.; Li, H. Spintronic Memristor as Interface between DNA and Solid State Devices. IEEE J. Emerg. Sel. Top. Circuits Syst. 2016, 6, 212–221. [Google Scholar] [CrossRef]
- Taib, B.N.; Manaf, A.A.; Sabani, N. A Comparative Investigation on Liquid-Based Memristor Sensor for Glucose Detection. Int. J. Nanoelectron. Mater. 2022, 15, 341–349. [Google Scholar]
- Hadis, N.S.M.; Manaf, A.A.; Rahman, M.F.A.; Ngalim, S.H.; Tang, T.H.; Citartan, M.; Ismail, A.; Herman, S.H. Fabrication and Characterization of Simple Structure Fluidic-Based Memristor for Immunosensing of NS1 Protein Application. Biosensors 2020, 10, 143. [Google Scholar] [CrossRef] [PubMed]
- Veeralingam, S.; Khandelwal, S.; Sha, R.; Badhulika, S. Direct growth of FeS2 on paper: A flexible, multifunctional platform for ultra-low cost, low power memristor and wearable non-contact breath sensor for activity detection. Mater. Sci. Semicond. Process. 2020, 108, 104910. [Google Scholar] [CrossRef]
- Wang, Y.; Gong, Y.; Yang, L.; Xiong, Z.; Lv, Z.; Xing, X.; Zhou, Y.; Zhang, B.; Su, C.; Liao, Q.; et al. MXene-ZnO Memristor for Multimodal In-Sensor Computing. Adv. Funct. Mater. 2021, 31, 2100144. [Google Scholar] [CrossRef]
- Sierociuk, D.; Dzielinski, A.; Sarwas, G.; Petras, I.; Podlubny, I.; Skovranek, T. Modelling heat transfer in heterogeneous media using fractional calculus. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20120146. [Google Scholar] [CrossRef] [PubMed]
- Matlob, M.A.; Jamali, Y. The Concepts and Applications of Fractional Order Differential Calculus in Modelling of Viscoelastic Systems: A primer. Crit. Rev. Biomed. Eng. 2019, 47, 249–276. [Google Scholar] [CrossRef] [PubMed]
- Gorenflo, R.; Kilbas, A.A.; Mainardi, F.; Rogosin, S. Mittag-Leffler Functions, Related Topics and Applications, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–540. [Google Scholar]
- Sabatier, J.; Farges, C. Initial value problems should not be associated to fractional model descriptions whatever the derivative definition used. Mathematics 2021, 6, 11318–11329. [Google Scholar] [CrossRef]
- Ortigueira, M.D. A New Look at the Initial Condition Problem. Mathematics 2022, 10, 1771. [Google Scholar] [CrossRef]
- López-Villanueva, J.A.; Bolívar, S.R. Constant Phase Element in the Time Domain: The Problem of Initialization. Energies 2022, 15, 792. [Google Scholar] [CrossRef]
- Fitt, A.D.; Goodwin, A.R.H.; Ronaldson, K.A.; Wakeham, W.A. A fractional differential equation for a MEMS viscometer used in the oil industry. J. Comput. Appl. Math. 2009, 229, 373–381. [Google Scholar] [CrossRef]
- Alsubaie, H.; Yousefpour, A.; Alotaibi, A.; Alotaibi, N.D.; Jahanshahi, H. Stabilization of Nonlinear Vibration of a Fractional-Order Arch MEMS Resonator Using a New Disturbance-Observer-Based Finite-Time Sliding Mode Control. Mathematics 2023, 11, 978. [Google Scholar] [CrossRef]
- Alsaade, F.W.; Al-zahrani, M.S. A Novel Fault-Tolerant Super-Twisting Control Technique for Chaos Stabilization in Fractional-Order Arch MEMS Resonators. Mathematics 2023, 11, 2276. [Google Scholar] [CrossRef]
- Goodarzi, M. Fractional Order Control of Micro Electro-Mechanical Systems. J. Mod. Process. Manuf. Prod. 2016, 5, 55–67. [Google Scholar]
- Macias, M.; Sierociuk, D.; Malesza, W. MEMS Accelerometer Noises Analysis Based on Triple Estimation Fractional Order Algorithm. Sensors 2022, 22, 527. [Google Scholar] [CrossRef] [PubMed]
- Lopes, A.M.; Machado, J.A.T.; Galhano, A.M. Towards fractional sensors. J. Vib. Control 2019, 25, 52–60. [Google Scholar] [CrossRef]
- Valsa, J.; Vlach, J. RC models of a constant phase element. Int. J. Circ. Theor. Appl. 2013, 41, 59–67. [Google Scholar] [CrossRef]
- Haba, T.C.; Ablart, G.; Camps, T.; Olivie, F. Influence of the electrical parameters on the input impedance of a fractal structure realised on silicon. Chaos Solit. Fractals 2005, 24, 479–490. [Google Scholar] [CrossRef]
- Pu, Y.-F.; Yuan, X. Fracmemristor: Fractional-Order Memristor. IEEE Access 2016, 4, 1872–1888. [Google Scholar] [CrossRef]
- Abdelouahab, M.S.; Lozi, R.; Chua, L. Memfractance: A mathematical paradigm for circuit elements with memory. Int. J. Bifurc. Chaos 2014, 24, 1430023. [Google Scholar] [CrossRef]
- Pu, Y.-F. Measurement Units and Physical Dimensions of Fractance-Part I: Position of Purely Ideal Fractor in Chua’s Axiomatic Circuit Element System and Fractional-Order Reactance of Fractor in Its Natural Implementation. IEEE Access 2016, 4, 3379–3397. [Google Scholar] [CrossRef]
- Machado, J.T. Fractional generalization of memristor and higher order elements. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 264–275. [Google Scholar] [CrossRef]
- Guo, Z.; Si, G.; Diao, L.; Jia, L.; Zhang, Y. Generalized modeling of the fractional-order memcapacitor and its character analysis. Commun. Nonlinear Sci. Numer. Simul. 2018, 59, 177–189. [Google Scholar] [CrossRef]
- Borah, M.; Roy, B.K. Hidden multistability in four fractional-order memristive, meminductive and memcapacitive chaotic systems with bursting and boosting phenomena. Eur. Phys. J. Spec. Top. 2021, 230, 1773–1783. [Google Scholar] [CrossRef]
- Oresanya, P.O.; Si, G.; Xu, X.; Gong, J.; Guo, Z. A unified modeling approach for characterization of fractional-order memory elements. Int. J. Circ. Theor. Appl. 2023, 1–14. [Google Scholar] [CrossRef]
- Martínez-Rincón, J.; Di Ventra, M.; Pershin, Y.V. Solid-state memcapacitive system with negative and diverging capacitance. Phys. Rev. B 2010, 81, 195430. [Google Scholar] [CrossRef]
- Shevchenko, S.N.; Pershin, Y.V.; Non, F. Qubit-based memcapacitors and meminductors. Phys. Rev. Appl. 2016, 6, 014006. [Google Scholar] [CrossRef]
- Guarcello, C.; Solinas, P.; Di Ventra, M.; Giazotto, F. Solitonic Josephson-based meminductive systems. Sci. Rep. 2017, 7, 46736. [Google Scholar] [CrossRef] [PubMed]
- Han, J.; Song, C.; Gao, S.; Wang, Y.; Chen, C.; Pan, F. Realization of the meminductor. ACS Nano 2014, 8, 10043–10047. [Google Scholar] [CrossRef] [PubMed]
- Dinavahi, A.; Yamamoto, A.; Harris, H.R. Physical evidence of meminductance in a passive, two-terminal circuit element. Sci. Rep. 2023, 13, 1817. [Google Scholar] [CrossRef] [PubMed]
- Chua, L.O. If it’s pinched it’s a memristor. Semicond. Sci. Technol. 2014, 29, 42. [Google Scholar] [CrossRef]
- Radwan, A.G.; Fouda, M.E. On the Mathematical Modeling of Memristor, Memcapacitor, and Meminductor, 1st ed.; Springer: Cham, Switzerland; Heidelberg, Germany; New York, NY, USA; Dordrecht, The Netherlands; London, UK, 2015; pp. 27–211. [Google Scholar]
- Jeltsema, D.; Scherpen, J.M.A. Multidomain modeling of nonlinear networks and systems. IEEE Contr. Syst. Mag. 2009, 29, 28–59. [Google Scholar]
- Jeltsema, D.; van der Schaft, A.J. Memristive Port-Hamiltonian Systems. Math Comp. Mod. Dyn. Syst. 2010, 16, 75–93. [Google Scholar] [CrossRef]
- Mohamed, M.G.A.; Kim, H.W.; Cho, T.-W. Modeling of Memristive and Memcapacitive Behaviors in Metal-Oxide Junctions. Sci. World J. 2015, 2015, 910126. [Google Scholar] [CrossRef] [PubMed]
- Smith, M.C. Synthesis of Mechanical Networks: The Inerter. IEEE T Aut. Cont. 2002, 47, 1648–1662. [Google Scholar] [CrossRef]
- Zhang, X.-L.; Gao, Q.; Nie, J. The mem-inerter: A new mechanical element with memory. Adv. Mech. Eng. 2018, 10, 1687814018778428. [Google Scholar] [CrossRef]
- Madhamshetty, K.; Manimala, J.M. Low-Rate Characterization of a Mechanical Inerter. Machines 2018, 6, 32. [Google Scholar] [CrossRef]
- Prodromakis, T.; Toumazou, C.; Chua, L. Two centuries of memristors. Nat. Mat. 2012, 11, 478–481. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef]
- Zhang, X.-L.; Geng, C.; Nie, J.; Gao, Q. The missing mem-inerter and extended mem-dashpot found. Nonlinear Dyn. 2020, 101, 835–856. [Google Scholar] [CrossRef]
- Chua, L.O. Everything you wish to know about memristors but are afraid to ask. Radioengineering 2015, 24, 319–368. [Google Scholar] [CrossRef]
- Vahl, A.; Carstensen, J.; Kaps, S.; Lupan, O.; Strunskus, T.; Adelung, R.; Faupel, F. Concept and modelling of memsensors as two terminal devices with enhanced capabilities in neuromorphic engineering. Sci. Rep. 2019, 9, 4361. [Google Scholar] [CrossRef]
- Biolek, Z.; Biolek, D. How Can the Hysteresis Loop of the Ideal Memristor Be Pinched? IEEE T Circuits-II 2014, 61, 491–495. [Google Scholar] [CrossRef]
- Biolek, Z.; Biolek, D.; Biolkova, V.; Kolka, Z. Comments on Pinched Hysteresis Loops of Memristive Elements. Radioengineering 2015, 24, 962–967. [Google Scholar] [CrossRef]
- Martinez-Rincon, J.; Pershin, Y.V. Bistable non-volatile elastic membrane memcapacitor exhibiting chaotic behavior. IEEE T Electron. Dev. 2011, 58, 1809–1812. [Google Scholar] [CrossRef]
- Biolek, Z.; Biolek, D.; Biolková, V.; Kolka, Z. Predictive Modeling of MEMS via Generic Meminductors. IEEE J. Emerg. Sel. Top. C 2022, 12, 785–792. [Google Scholar] [CrossRef]
- Ochs, K.; Solan, E. Energetically consistent modeling of passive memelements. Int. J. Electron. Commun. 2018, 93, 19–25. [Google Scholar] [CrossRef]
- Sah, M.P.; Yang, C.; Kim, H.; Muthuswamy, B.; Jevtic, J.; Chua, L.O. A Generic Model of Memristors with Parasitic Components. IEEE T Circuits-I 2015, 62, 891–898. [Google Scholar] [CrossRef]
- Pickett, M.D.; Williams, R.S. Sub-100 fJ and sub-nanosecond thermally driven threshold switching in niobium oxide crosspoint nanodevices. Nanotechnology 2012, 23, 215202. [Google Scholar] [CrossRef]
- Biolek, Z.; Biolek, D.; Vávra, J.; Biolková, V.; Kolka, Z. The simplest memristor in the world. In Proceedings of the 2016 IEEE International Symposium on Circuits and Systems (ISCAS), Montreal, QC, Canada, 22–25 May 2016; IEEE: Toulouse, France, 2016; pp. 1854–1857. [Google Scholar]
- Dittmann, R.; Menzel, S.; Waser, R. Nanoionic memristive phenomena in metal oxides: The valence change mechanism. Adv. Phys. 2021, 70, 155–349. [Google Scholar] [CrossRef]
- Corinto, F.; Ascoli, A. Memristive diode bridge with LCR filter. Electron. Lett. 2012, 48, 824–825. [Google Scholar] [CrossRef]
- Sadecki, J.; Marszalek, W. Analysis of a memristive diode bridge rectifier. Electron. Lett. 2019, 55, 120–122. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Biolek, Z.; Biolek, D.; Biolková, V.; Kolka, Z. Extended Higher-Order Elements with Frequency-Doubled Parameters: The Hysteresis Loops Are Always of Type II. Sensors 2023, 23, 7179. https://doi.org/10.3390/s23167179
Biolek Z, Biolek D, Biolková V, Kolka Z. Extended Higher-Order Elements with Frequency-Doubled Parameters: The Hysteresis Loops Are Always of Type II. Sensors. 2023; 23(16):7179. https://doi.org/10.3390/s23167179
Chicago/Turabian StyleBiolek, Zdeněk, Dalibor Biolek, Viera Biolková, and Zdeněk Kolka. 2023. "Extended Higher-Order Elements with Frequency-Doubled Parameters: The Hysteresis Loops Are Always of Type II" Sensors 23, no. 16: 7179. https://doi.org/10.3390/s23167179
APA StyleBiolek, Z., Biolek, D., Biolková, V., & Kolka, Z. (2023). Extended Higher-Order Elements with Frequency-Doubled Parameters: The Hysteresis Loops Are Always of Type II. Sensors, 23(16), 7179. https://doi.org/10.3390/s23167179